Результат интеллектуальной деятельности: Способ и устройство для безопасного вождения
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ [0001] Настоящая заявка основана на заявке на патент КНР №201610465407.0, поданной 23 июня 2016 г., полное содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к технической области «умных» самобалансирующихся транспортных средств и в частности к способу и устройству для безопасного вождения (например, передвижения).
УРОВЕНЬ ТЕХНИКИ
[0003] «Умное» самобалансирующееся транспортное средство также известно как транспортное средство, управляемое с помощью датчиков (Sensor Controlled Vehicle (SCV), Сегвей и т.п. В настоящее время в коммерческой продаже «умные» самобалансирующиеся транспортные средства в основном являются средствами двухколесного или одноколесного типа. «Умное» самобалансирующееся транспортное средство в основном управляется на основе так называемого базового принципа «динамической стабилизации», который может поддерживать систему сбалансированной путем обнаружения изменения положения транспортного средства, используя гироскоп и датчик ускорений, являющиеся встроенными, и приводя в движение двигатель для выполнения соответствующей корректировки с помощью системы управления сервоприводом.
[0004] В предшествующем уровне техники для обеспечения безопасности водителя разработаны несколько конструкций «умного» самобалансирующегося транспортного средства, например ограничивающие максимальную скорость «умного» самобалансирующегося транспортного средства. Однако каждый водитель может иметь свой собственный опыт вождения, и, следовательно, трудно сформулировать единую схему для защиты водителей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Варианты осуществления настоящего изобретения предлагают способ и устройство для безопасного вождения. Техническим решением является следующее.
[0006] В соответствии с первым аспектом вариантов осуществления настоящего изобретения предлагается способ безопасного вождения, содержащий:
получение данных о передвижении текущего пользователя самобалансирующегося транспортного средства;
сравнение этих данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя; и
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[0007] В одном варианте осуществления данные о передвижении могут включать одно или более из следующих данных:
время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[0008] В одном варианте осуществления данные о передвижении включают в себя время передвижения или дальность передвижения,
сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, может содержать:
получение диапазона времени передвижения или диапазона дальности передвижения, соответствующих предварительно установленному уровню пользователя, соответственно; и
определение диапазона времени передвижения или диапазона дальности передвижения, в которые попадает время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства; и
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства, в соответствии с результатом сравнения, может содержать:
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[0009] В одном варианте осуществления данные о передвижении включают в себя частоту качаний, величину дуги качаний и время качаний,
сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, содержит:
получение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, соответствующих предварительно установленному уровню пользователя, соответственно; и
определение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего пользователя самобалансирующегося транспортного средства, и
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения может содержать:
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном частоты качаний, диапазоном величины дуги качаний и диапазоном времени качаний, в которые попадает текущий пользователь самобалансирующегося транспортного средства.
[0010] В одном варианте осуществления способ может дополнительно содержать: когда данные о передвижении по содержат по меньшей мере частоту качаний, величину дуги качаний и время качаний,
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства как уровня пользователя, определенного в соответствии с частотой качаний, величиной дуги качаний и временем качаний текущего пользователя самобалансирующегося транспортного средства.
[0011] В одном варианте осуществления способ может дополнительно содержать:
отображение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0012] В одном варианте осуществления, после определения уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения, способ дополнительно содержит:
определение стартового ускорения самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0013] В одном варианте осуществления определение стартового ускорения самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства может содержать:
предварительную установку стартового ускорения самобалансирующегося транспортного средства для каждого уровня пользователя и запоминание соответствия между уровнем пользователя и стартовым ускорением, соответствующим уровню пользователя; и
определение стартового ускорения, соответствующего уровню пользователя для текущего пользователя самобалансирующегося транспортного средства, исходя из запомненного соответствия.
[0014] В одном варианте осуществления способ может дополнительно содержать:
определение, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства; и
если уровень пользователя изменился, корректировку стартового ускорения самобалансирующегося транспортного средства так, чтобы оно было стартовым ускорением, соответствующим измененному уровню пользователя.
[0015] В одном варианте осуществления способ может дополнительно содержать:
сравнение измененного уровня пользователя с уровнем пользователя перед изменением;
если уровень пользователя понизился, блокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего уровню пользователя перед изменением; и
если уровень пользователя повысился, деблокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего измененному уровню пользователя.
[0016] В соответствии со вторым аспектом вариантов осуществления настоящего изобретения предлагается устройство для безопасного вождения, содержащее:
модуль получения, выполненный с возможностью получать данные о передвижении текущего пользователя самобалансирующегося транспортного средства;
модуль сравнения, выполненный с возможностью сравнивать эти данные о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя; и
первый модуль определения, выполненный с возможностью определения уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[0017] В одном варианте осуществления данные о передвижении могут включать одно или более из следующих данных:
время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[0018] В одном варианте осуществления данные о передвижении включают в себя время передвижения или дальность передвижения,
модуль сравнения может содержать:
первый подмодуль получения, выполненный с возможностью получать диапазон времени передвижения или диапазон дальности передвижения, соответствующие предварительно установленному уровню пользователя, соответственно; и
первый подмодуль определения, выполненный с возможностью определять диапазон времени передвижения или диапазон дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства, и
первый модуль определения может содержать:
второй подмодуль определения, выполненный с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[0019] В одном варианте осуществления данные о передвижении содержат частоту качаний, величину дуги качаний и время качаний,
модуль сравнения может содержать:
второй подмодуль получения, выполненный с возможностью получать диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, соответствующие предварительно установленному уровню пользователя, соответственно; и
третий подмодуль определения, выполненный с возможностью определять диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего пользователя самобалансирующегося транспортного средства, и
первый модуль определения может содержать:
четвертый подмодуль определения, выполненный с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном частоты качаний, диапазоном величины дуги качаний и диапазоном времени качаний, в которые попадает текущий пользователь самобалансирующегося транспортного средства.
[0020] В одном варианте осуществления, когда данные о передвижении содержат по меньшей мере частоту качаний, величину дуги качаний и время качаний, устройство может дополнительно содержать:
второй модуль определения, выполненный с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства как уровень пользователя, определенный в соответствии с частотой качаний, величиной дуги качаний и временем качаний текущего пользователя самобалансирующегося транспортного средства.
[0021] В одном варианте осуществления устройство может дополнительно содержать:
дисплейный модуль, выполненный с возможностью отображать уровень пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0022] В одном варианте осуществления устройство может дополнительно содержать:
третий модуль определения, выполненный с возможностью определять стартовое ускорение самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0023] В одном варианте осуществления третий модуль определения может содержать:
подмодуль памяти, выполненный с возможностью предварительно устанавливать стартовое ускорение самобалансирующегося транспортного средства для каждого уровня пользователя и запоминать соответствие между уровнем пользователя и стартовым ускорением, соответствующим уровню пользователя; и
пятый подмодуль определения, выполненный с возможностью определять стартовое ускорение, соответствующее уровню пользователя для текущего пользователя самобалансирующегося транспортного средства, исходя из запомненного соответствия.
В одном варианте осуществления устройство может дополнительно содержать:
четвертый модуль определения, выполненный с возможностью определять, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства; и
модуль корректировки, выполненный с возможностью корректировать текущее стартовое ускорение самобалансирующегося транспортного средства так, чтобы оно было стартовым ускорением, соответствующим измененному уровню пользователя, если уровень пользователя изменился.
[0024] В одном варианте осуществления устройство может дополнительно содержать:
модуль сравнения, выполненный с возможностью сравнивать измененный уровень пользователя с уровнем пользователя перед изменением;
модуль блокировки, выполненный с возможностью блокировать стартовое ускорение самобалансирующегося транспортного средства, соответствующего уровню пользователя перед изменением, если уровень пользователя понизился; и
модуль деблокировки, выполненный с возможностью деблокировать стартовое ускорение самобалансирующегося транспортного средства, соответствующего измененному уровню пользователя, если уровень пользователя повысился.
[0025] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предлагается устройство для безопасного вождения, содержащее:
процессор; и
память для хранения команд, выполняемых процессором;
где процессор выполнен с возможностью выполнять:
получение данных о передвижении текущего пользователя самобалансирующегося транспортного средства;
сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя; и
определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[0026] Технические решения, предложенные в вариантах осуществления настоящего изобретения, имеют следующие положительные эффекты.
[0027] В соответствии с приведенными выше техническими решениями получают данные о передвижении текущего пользователя самобалансирующегося транспортного средства, эти данные о передвижении сравнивают с данными о передвижении, соответствующими предварительно установленному уровню пользователя, и уровень пользователя для текущего пользователя самобалансирующегося транспортного средства определяют в соответствии с результатом сравнения. Соответственно, после того, как водитель подтвердил свой собственный уровень, водителю может быть напомнено о необходимости корректировки скорости, ускорения и т.д. самобалансирующегося транспортного средства в соответствии с его собственным уровнем, чтобы обеспечить безопасность водителя.
[0028] Следует понимать, что как приведенное выше общее описание, так и последующее подробное описание являются только иллюстративными и пояснительными и не ограничивают настоящего описания, как оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0029] Прилагаемые чертежи, которые включены в описание и составляют часть данного описания, иллюстрируют варианты осуществления в соответствии с настоящим изобретением и вместе с описанием служат для объяснения принципов настоящего изобретения.
[0030] Фиг. 1 представляет блок-схему, иллюстрирующую способ безопасного вождения в соответствии с примером осуществления.
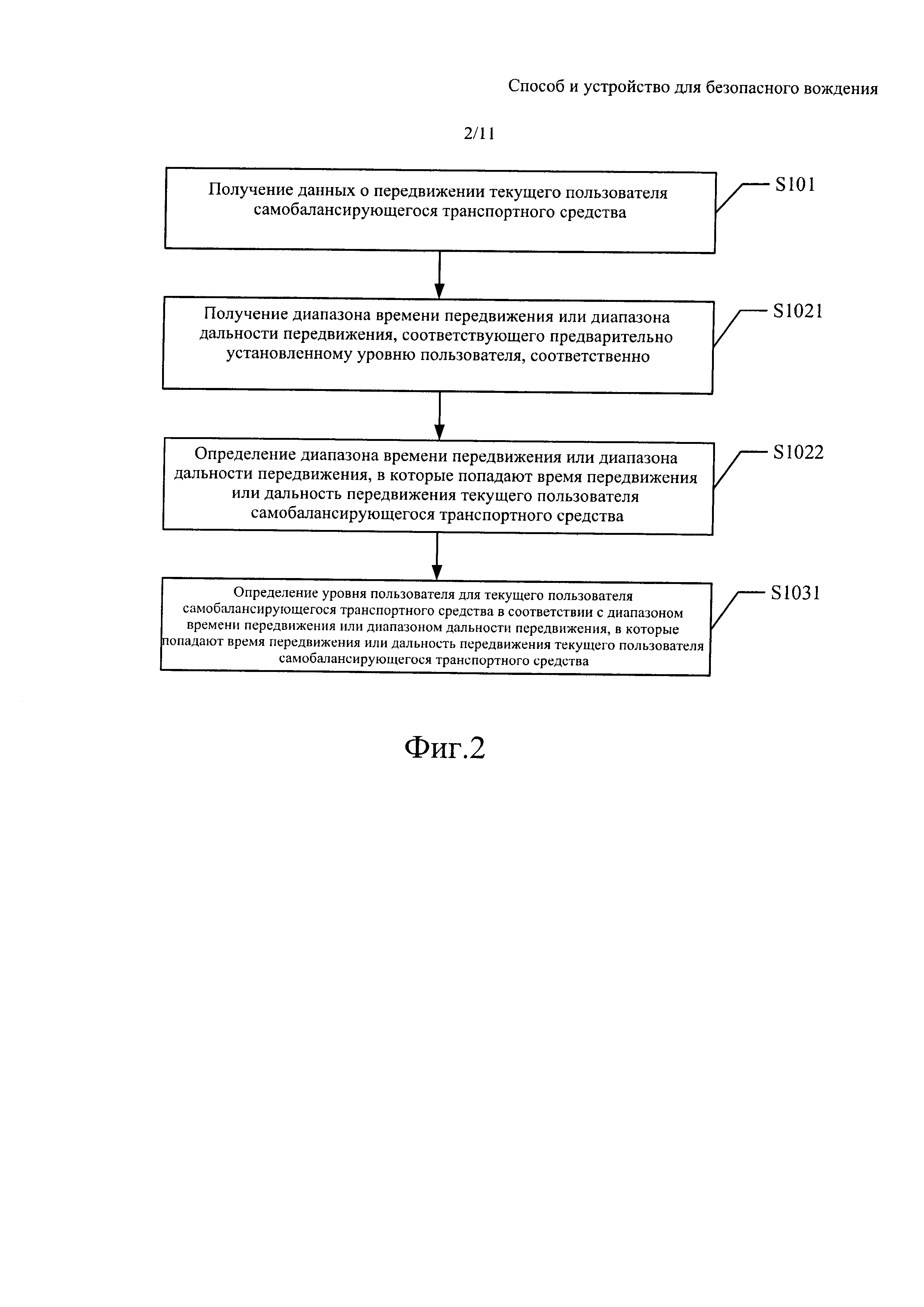
[0031] Фиг. 2 представляет блок-схему, иллюстрирующую другой способ безопасного вождения в соответствии с примером осуществления.
[0032] Фиг. 3 представляет блок-схему, иллюстрирующую еще один способ безопасного вождения в соответствии с примером осуществления.
[0033] Фиг. 4 представляет блок-схему, иллюстрирующую еще один способ безопасного вождения в соответствии с примером осуществления.
[0034] Фиг. 5 представляет блок-схему, иллюстрирующую еще один способ безопасного вождения в соответствии с примером осуществления.
[0035] Фиг. 6 представляет блок-схему, иллюстрирующую шаг S105 в способе безопасного вождения в соответствии с примером осуществления.
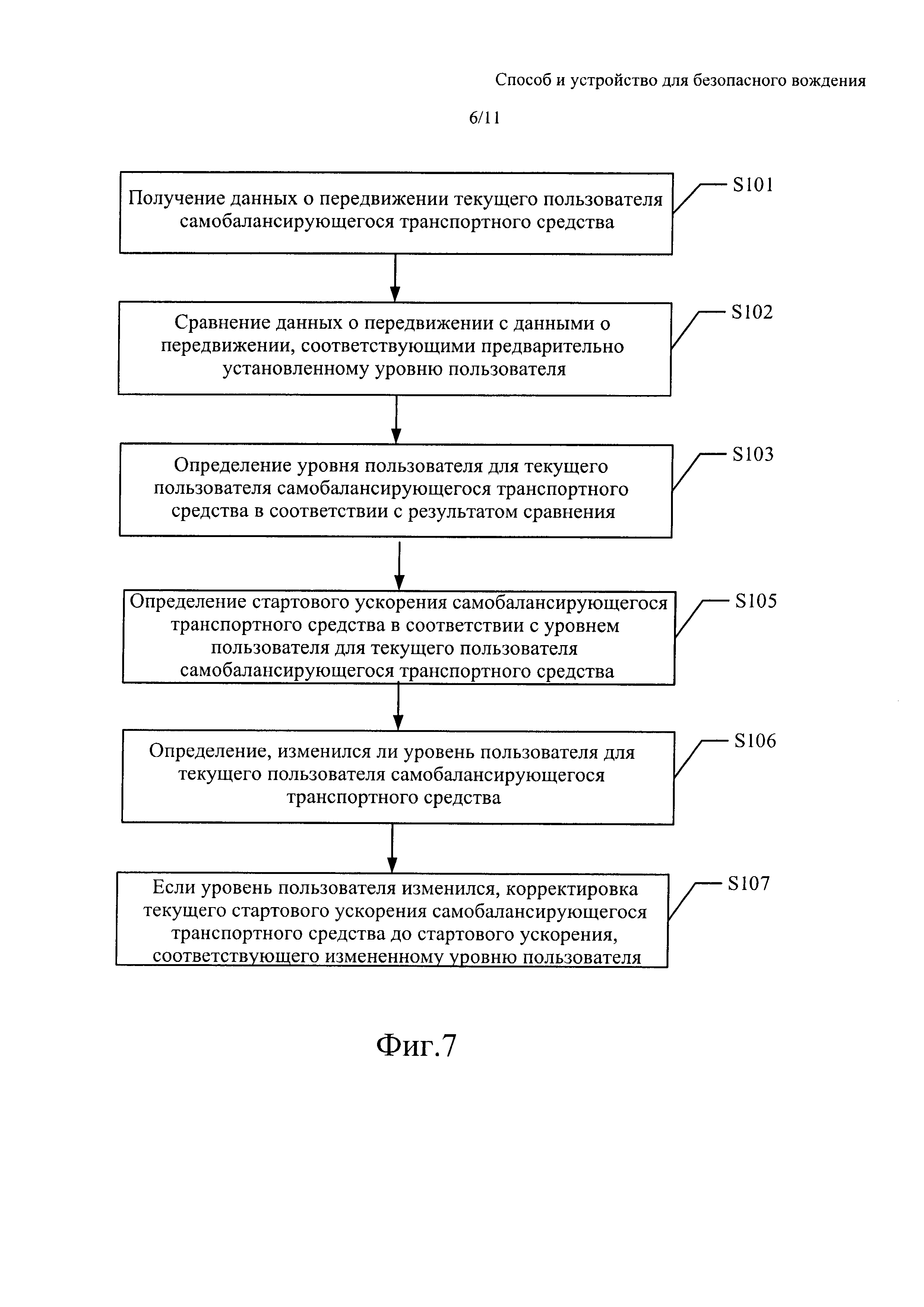
[0036] Фиг. 7 представляет блок-схему, иллюстрирующую еще один способ безопасного вождения в соответствии с примером осуществления.
[0037] Фиг. 8 представляет блок-схему, иллюстрирующую еще один способ безопасного вождения в соответствии с примером осуществления.
[0038] Фиг. 9 представляет структурную схему устройства для безопасного вождения в соответствии с примером осуществления.
[0039] Фиг. 10 представляет структурную схему другого устройства для безопасного вождения в соответствии с примером осуществления.
[0040] Фиг. 11 представляет структурную схему еще одного устройства для безопасного вождения в соответствии с примером осуществления.
[0041] Фиг. 12 представляет структурную схему еще одного устройства для безопасного вождения в соответствии с примером осуществления.
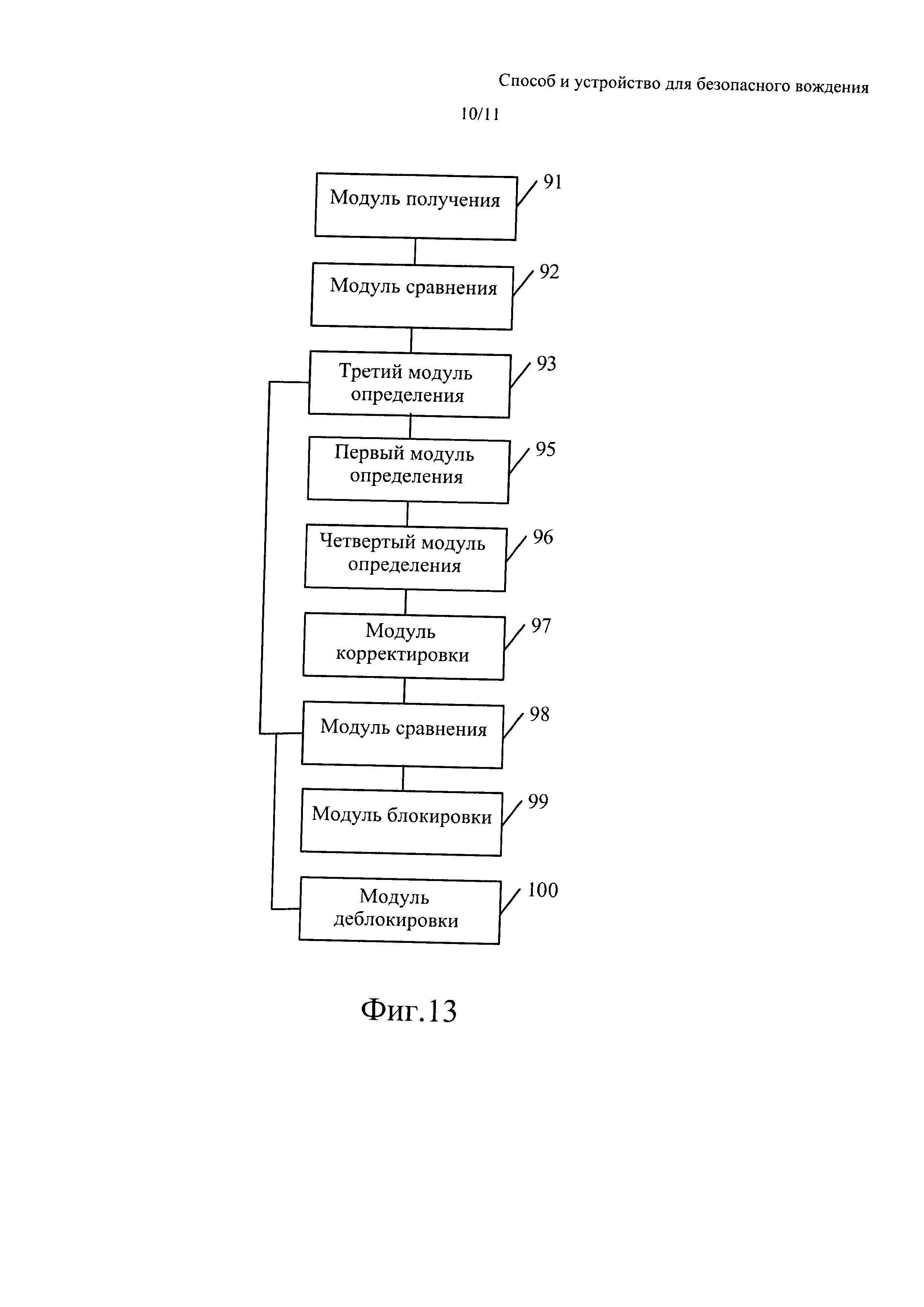
[0042] Фиг. 13 представляет структурную схему еще одного устройства для безопасного вождения в соответствии с примером осуществления.
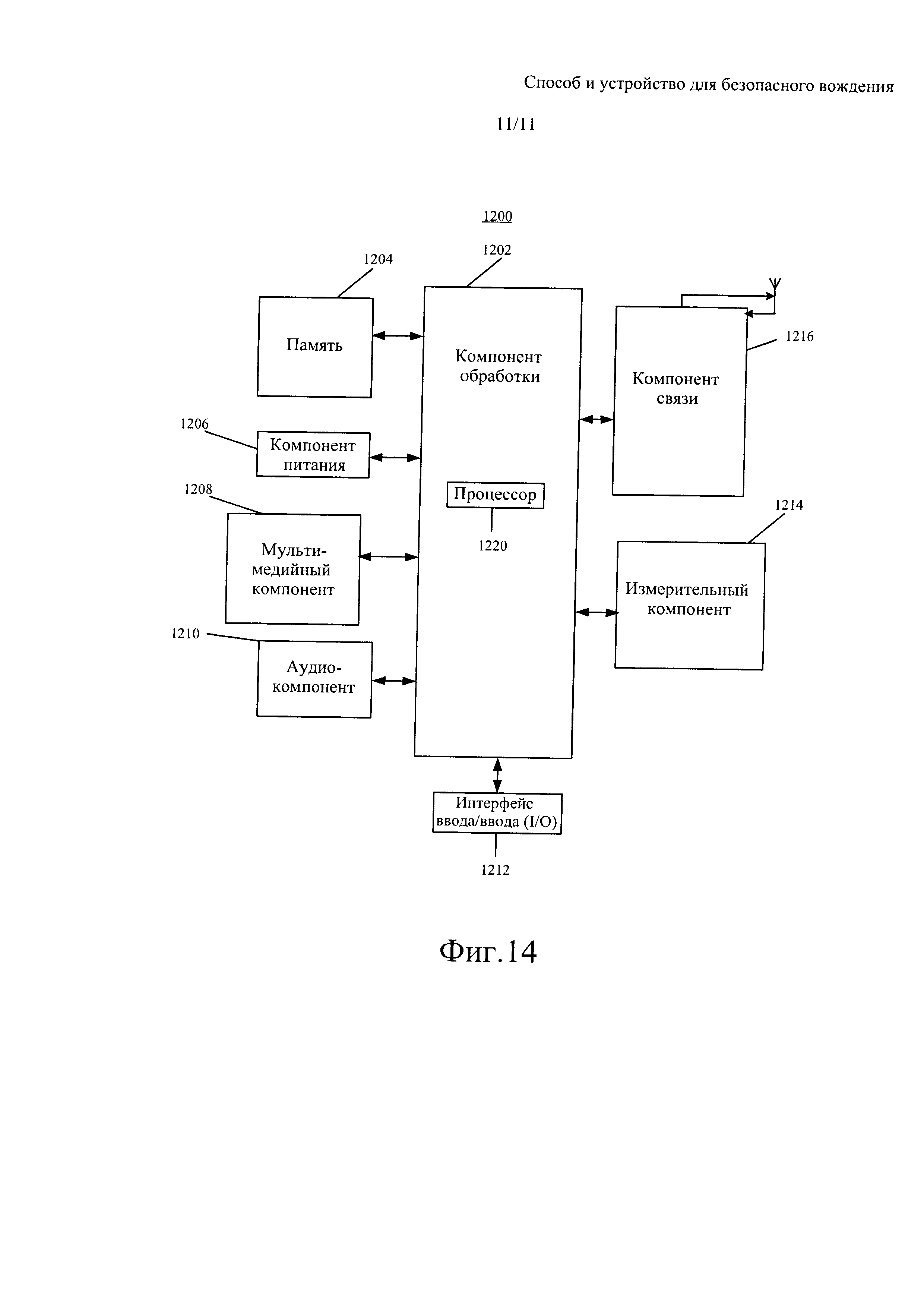
[0043] Фиг. 14 представляет структурную схему устройства, применимого для безопасного вождения, в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0044] Теперь будет приведено подробное описание иллюстративных вариантов осуществления, примеры которых представлены на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, на которых одинаковые номера на разных чертежах представляют одинаковые или аналогичные элементы, если не указано иное. Реализации, изложенные в последующем описании примеров осуществления, не представляют все реализации в соответствии с настоящим изобретением. Напротив, они являются только примерами устройств и способов, связанных с настоящим изобретением, как оно изложено в прилагаемой формуле изобретения.
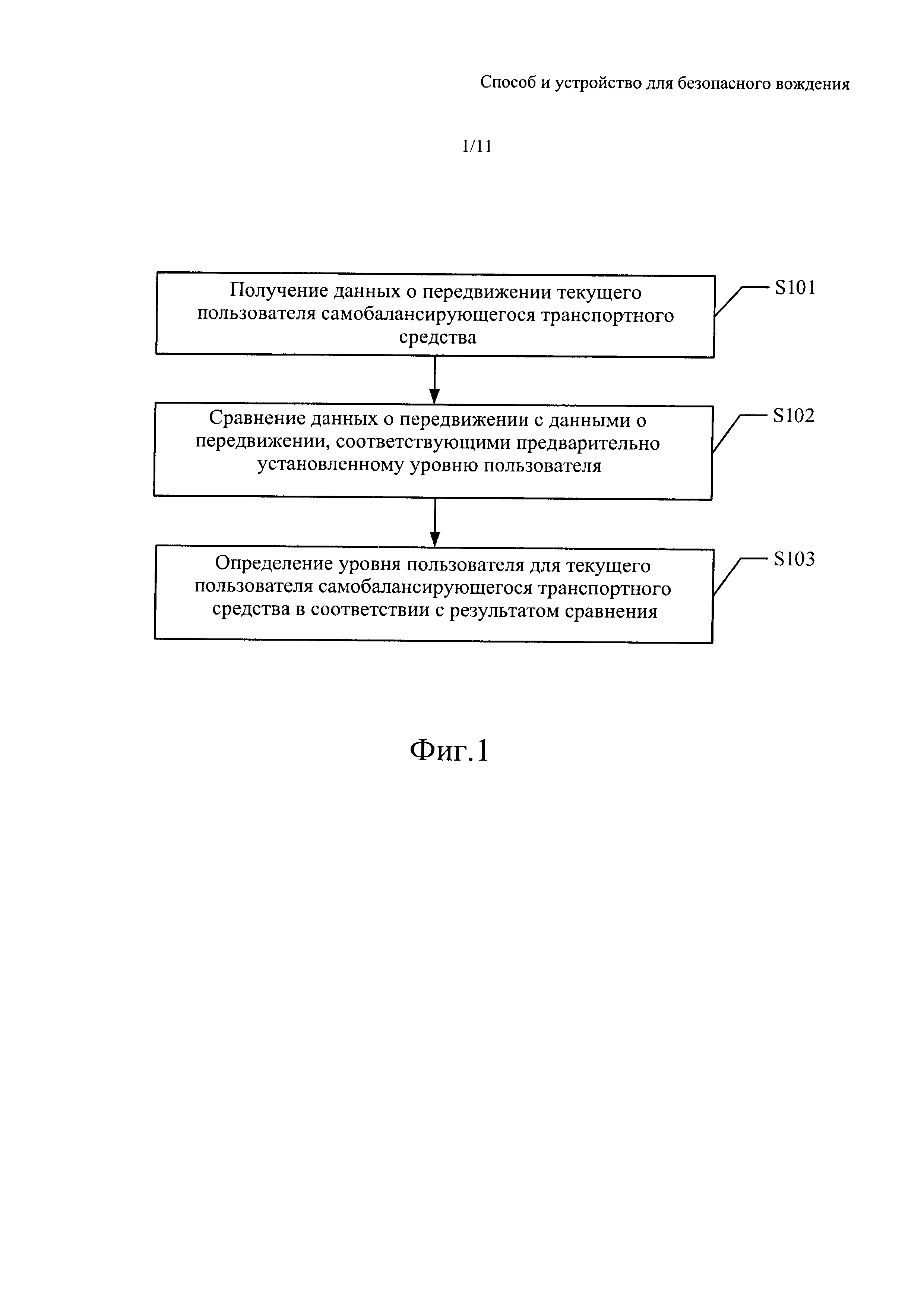
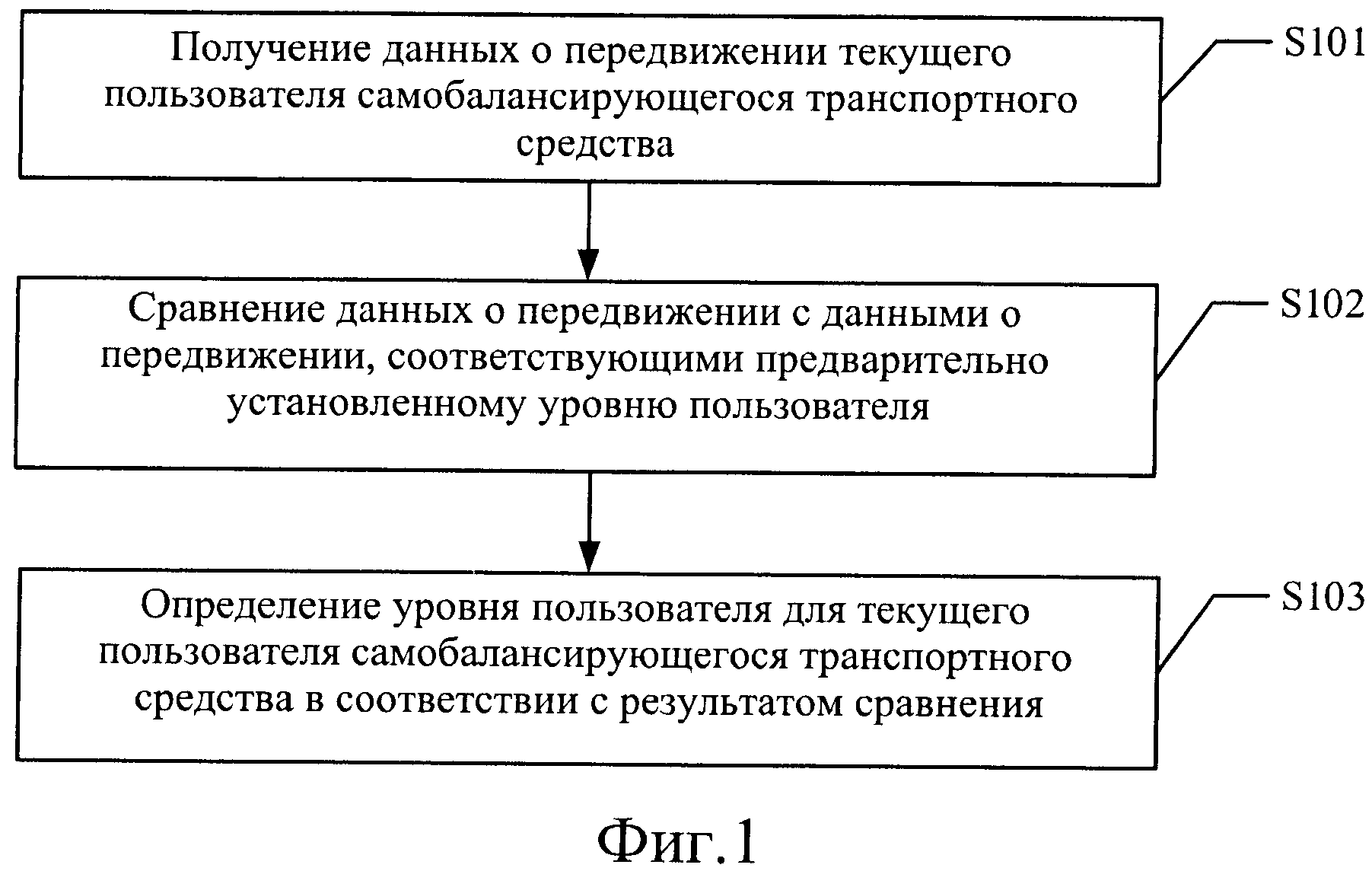
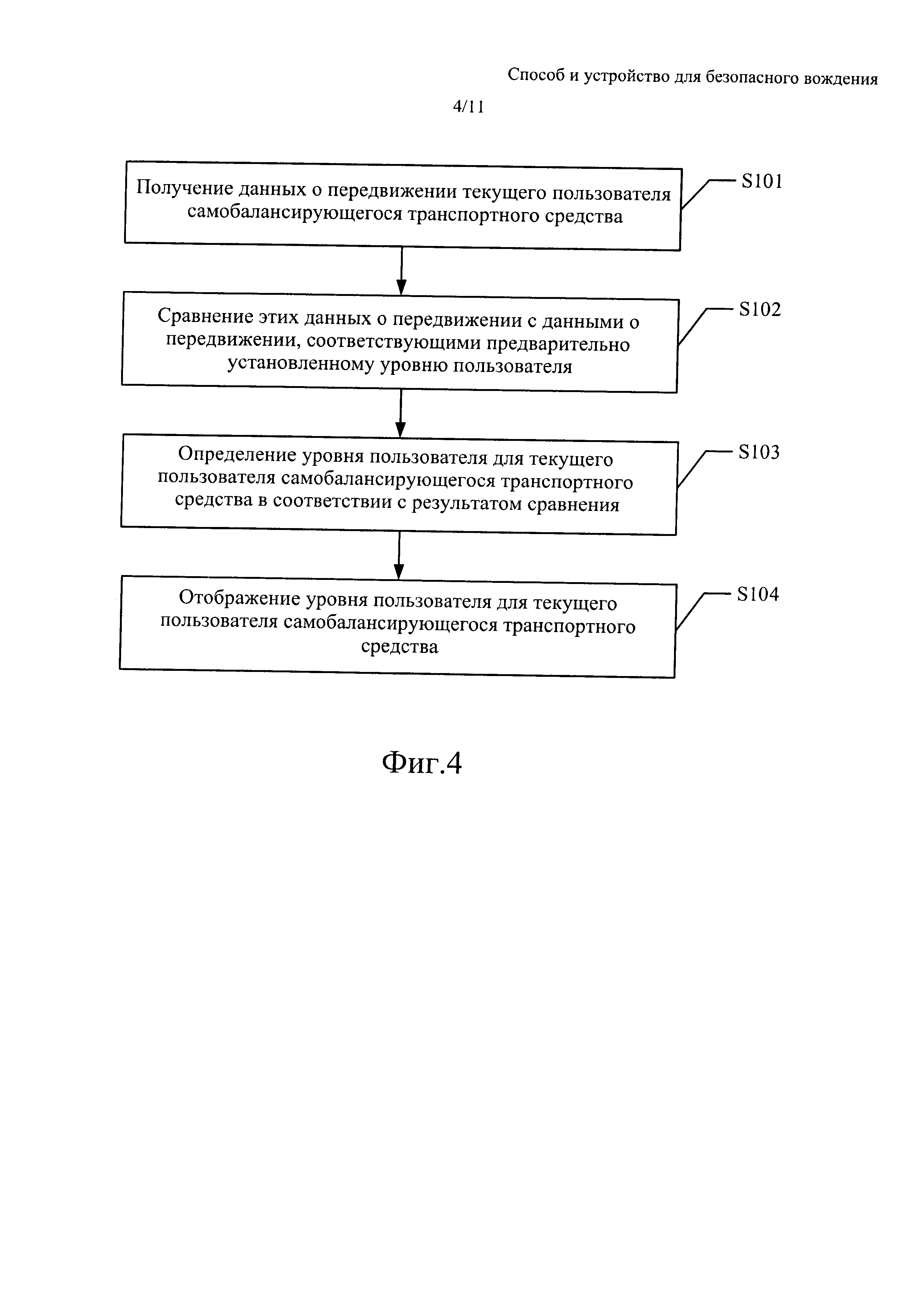
[0045] На фиг. 1 представлена блок-схема способа безопасного вождения в соответствии с примером осуществления. Как показано на фиг. 1, способ содержит шаги S101-S103.
[0046] На шаге S101 получают данные о передвижении текущего пользователя самобалансирующегося транспортного средства
[0047] На шаге S102 эти данные о передвижении сравнивают с данными о передвижении, соответствующими предварительно установленному уровню пользователя.
[0048] На шаге S103 определяют уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[0049] В соответствии с вышеуказанным способом для вариантов осуществления настоящего изобретения получают данные о передвижении текущего пользователя самобалансирующегося транспортного средства, эти данные о передвижении сравнивают с данными о передвижении, соответствующими предварительно установленному уровню пользователя, и определяют уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения. Соответственно, после подтверждения уровня пользователя для водителя, ему может быть напомнено о необходимости скорректировать скорость, ускорение и т.д. самобалансирующегося транспортного средства в соответствии с его собственным уровнем, чтобы обеспечить безопасность водителя.
[0050] В одном варианте осуществления данные о передвижении могут включать одно или более из следующих данных:
[0051] время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[0052] В одном варианте осуществления данные о передвижении содержат время передвижения или дальность передвижения. Как показано на фиг. 2, шаг S102 может быть реализован в виде шагов S1021-S1022.
[0053] На шаге S1021 получают соответственно диапазон времени передвижения или диапазон дальности передвижения, соответствующие предварительно установленному уровню пользователя.
[0054] На шаге S1022 определяют диапазон времени передвижения или диапазон дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[0055] При этом шаг S103 может быть реализован как следующий шаг S1031.
[0056] На шаге S1031 определяют уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[0057] Уровень пользователя может быть установлен в соответствии со временем передвижения или дальностью передвижения пользователя.
[0058] Например, уровень пользователя устанавливают в зависимости от времени передвижения.
[0059] Если пользователь начинает использовать самобалансирующееся транспортное средство (время передвижения составляет 0-30 часов, этот диапазон может быть установлен в зависимости от реальной ситуации), пользователь определяется как новичок.
[0060] Если пользователь использовал самобалансирующееся транспортное средство в течение 30-80 часов, пользователь определяется как начальный пользователь.
[0061] Если пользователь использовал самобалансирующееся транспортное средство в течение 80-200 часов, пользователь определяется как средний пользователь.
[0062] Если пользователь использовал самобалансирующееся транспортное средство в течение времени свыше 200 часов, пользователь определяется как продвинутый пользователь.
[0063] Уровень пользователя устанавливают в зависимости от дальности передвижения.
[0064] Если пользователь проехал на самобалансирующемся транспортном средстве 0-20 км (эта дистанция может изменяться в зависимости от реальной ситуации), этот пользователь определяется как новичок.
[0065] Если пользователь проехал на самобалансирующемся транспортном средстве 20-60 км, этот пользователь определяется как начальный пользователь.
[0066] Если пользователь проехал на самобалансирующемся транспортном средстве 60-200 км, этот пользователь определяется как средний пользователь.
[0067] Если пользователь проехал на самобалансирующемся транспортном средстве свыше 200 км, этот пользователь определяется как продвинутый пользователь.
[0068] Например, если время передвижения пользователя составляет 50 часов, этот пользователь определяется как начальный пользователь. В настоящем варианте осуществления при определении уровня пользователя с помощью времени передвижения или дальности передвижения этот уровень пользователя может быть определен просто и быстро.
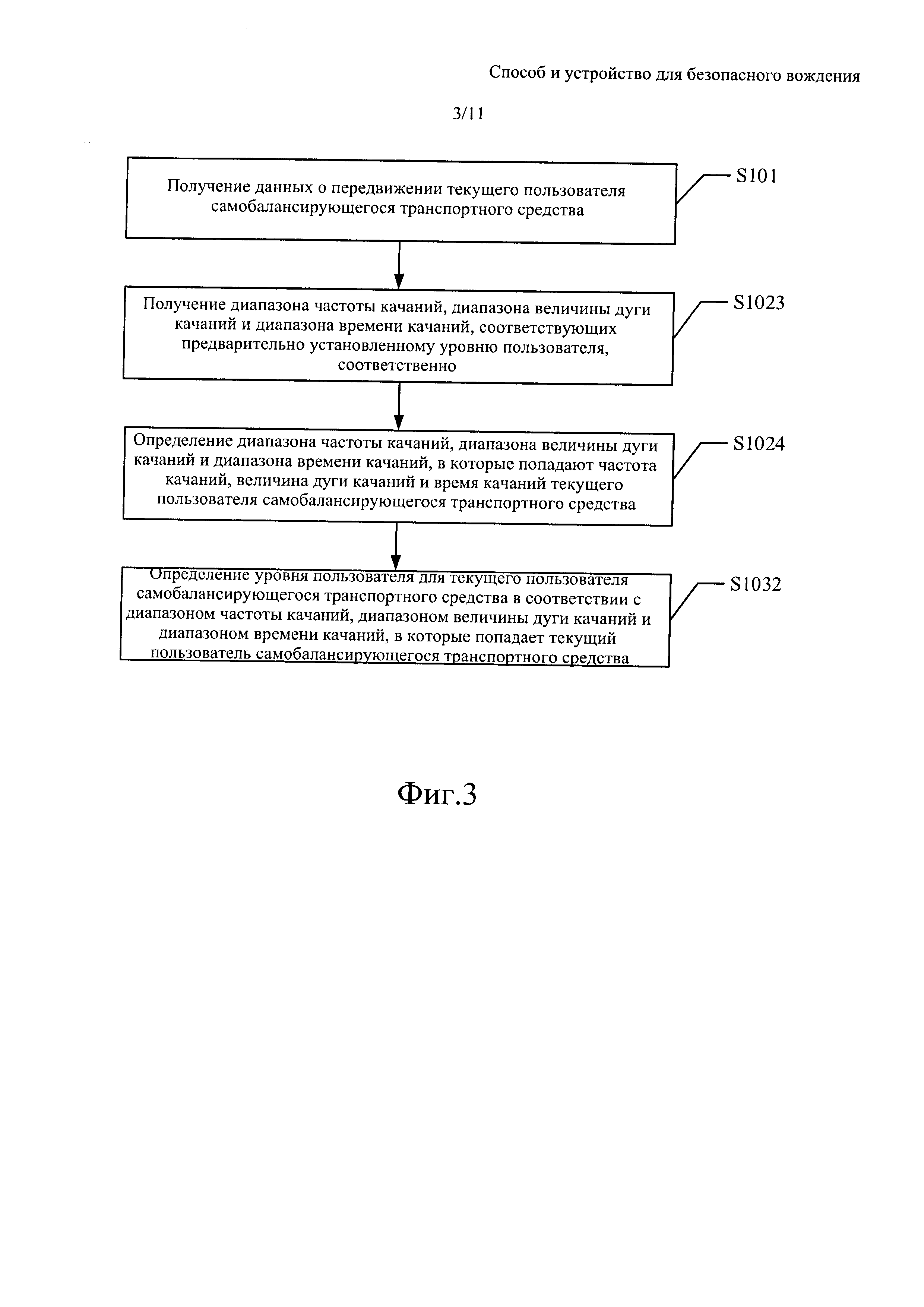
[0069] В одном варианте осуществления данные о передвижении содержат частоту качаний, величину дуги качаний и время качаний. Как показано на фиг. 3, шаг S102 может быть дополнительно реализован как следующие шаги S1023-S1024.
[0070] На шаге S1023 получают соответственно диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, соответствующие предварительно установленному уровню пользователя.
[0071] На шаге S1024 определяют диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего пользователя самобалансирующегося транспортного средства.
[0072] При этом шаг S103 может быть дополнительно реализован как следующий шаг S1032.
[0073] На шаге S1032 уровень пользователя для текущего пользователя самобалансирующегося транспортного средства определяют в соответствии с диапазоном частоты качаний, диапазоном величины дуги качаний и диапазоном времени качаний, в которые попадает текущий пользователь самобалансирующегося транспортного средства.
[0074] Уровень пользователя может быть также установлен в соответствии с мастерством езды пользователя самобалансирующегося транспортного средства. Самобалансирующееся транспортное средство снабжается уклономером, и уровень пользователя может быть оценен в соответствии с частотой качаний, величиной дуги качаний и временем качаний.
[0075] Диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, соответствующие предварительно установленному уровню пользователя, могут быть установлены предварительно. Например, когда уровнем пользователя является новичок, диапазон времени качаний может быть установлен от 20 до 50 секунд, диапазон частоты качаний может быть установлен от 1 раза в секунду до двух раз в секунду, и диапазон величины дуги качаний может быть установлен от 15 градусов до 30 градусов. Когда данные о передвижении пользователя попадают в эти диапазоны, уровень пользователя определяется как новичок.
[0076] Например, если пользователь качается 20 раз (число может быть установлено в соответствии с реальным требованием) в течение 30 секунд при езде на самобалансирующемся транспортном средстве и каждое качание достигает величины дуги в 20 градусов, пользователь определяется как новичок.
[0077] Если пользователь качается два или три раза в течение 1 минуты при езде на самобалансирующемся транспортном средстве и каждое качание достигает величины дуги в 10 градусов, пользователь определяется как начальный пользователь.
[0078] Если пользователь слегка качается в процессе езды на самобалансирующемся транспортном средстве, этот пользователь определяется как средний пользователь.
[0079] Если никаких повторных внезапных качаний не происходит в процессе езды на самобалансирующемся транспортном средстве в течение определенного периода времени, пользователь определяется как продвинутый пользователь.
[0080] В одном варианте осуществления вышеуказанный способ может дополнительно содержать шаг А.
[0081] На шаге А, когда данные о передвижении содержат по меньшей мере частоту качаний, величину дуги качаний и время качаний, уровень пользователя для текущего пользователя самобалансирующегося транспортного средства может быть определен в соответствии с уровнем пользователя, определенным в соответствии с частотой качаний, величиной дуги качаний и временем качаний текущего пользователя самобалансирующегося транспортного средства.
[0082] Когда данные о передвижении содержат частоту качаний, величину дуги качаний и время качаний, уровень текущего пользователя самобалансирующегося транспортного средства определяется непосредственно в соответствии с частотой качаний, величиной дуги качаний и временем качаний, независимо от таких данных, как дальность передвижения и время передвижения. То есть, условие оценки при определении уровня пользователя в зависимости от частоты качаний, величины дуги качаний и времени качаний имеет наивысший приоритет. Например, если пользователь часто качается и имеет большой угол качаний, уровень пользователя определяется непосредственно, независимо от времени передвижения и дальности передвижения пользователя.
[0083] В настоящем варианте осуществления частота качаний, величина дуги качаний и время качаний могут в некоторой степени представлять мастерство езды пользователя, и хотя определять уровень пользователя в соответствии с мастерством езды пользователя сложнее, чем определять уровень пользователя в соответствии со временем передвижения и дальностью передвижения, определяемый при этом уровень пользователя является более точным.
[0084] В настоящем варианте осуществления, как показано на фиг. 4, вышеуказанный способ может дополнительно содержать шаг S104.
[0085] На шаге S104 уровень пользователя самобалансирующегося транспортного средства может отображаться на экране.
[0086] Пользователь может подтвердить уровень пользователя другими способами. Альтернативно, уровень пользователя может отображаться для пользователя на экране, так что пользователь может иметь более наглядное подтверждение.
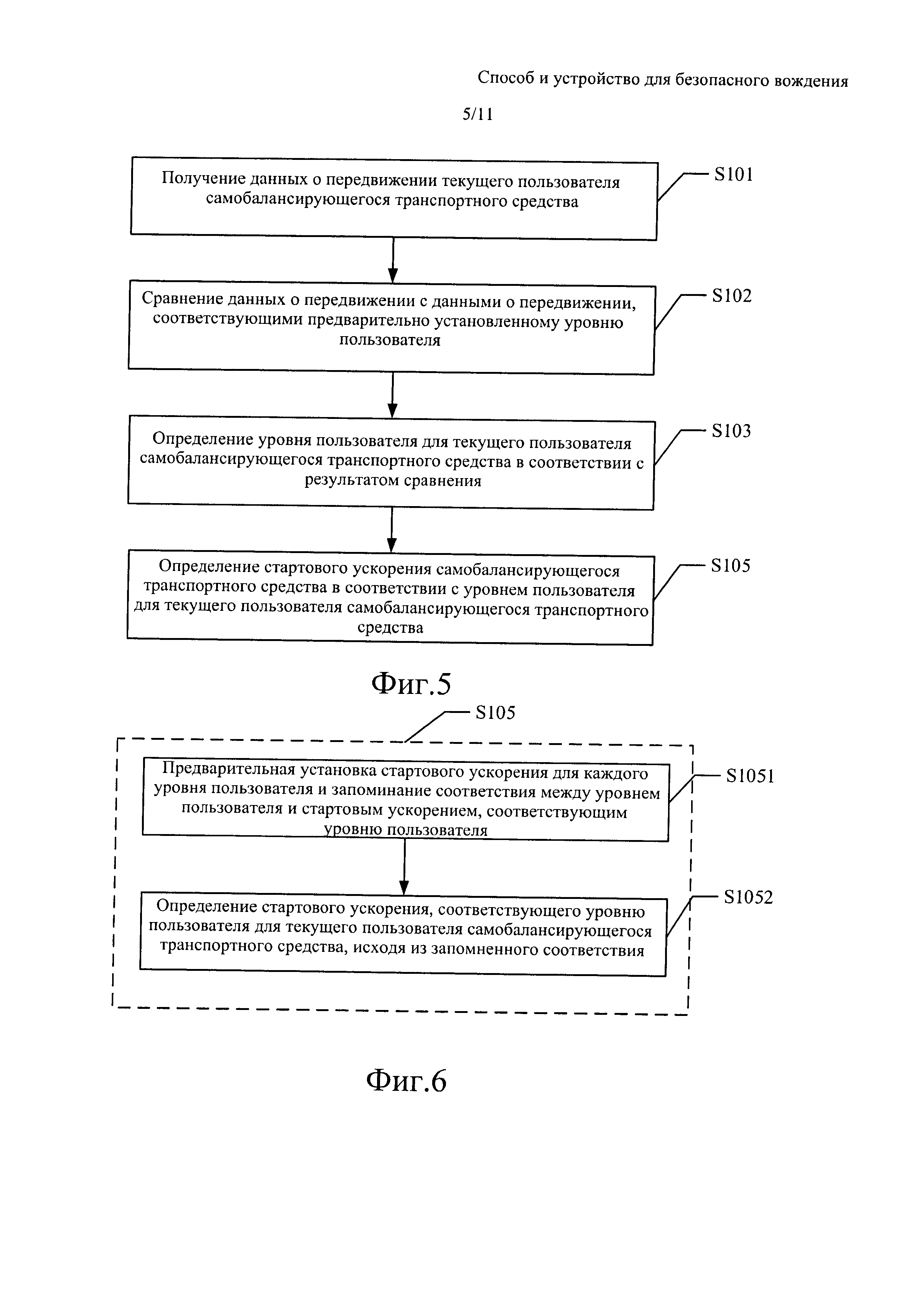
[0087] В одном варианте осуществления, как показано на фиг. 5, после шага S103 вышеуказанный способ может дополнительно содержать шаг S105.
[0088] На шаге S105 определяют стартовое ускорение самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0089] Например, когда у транспортного средства занимает 8 секунд для разгона от 0 до 100 км/ч (0-100 км/час) во время старта, стартовое ускорение «а» транспортного средства представляется следующим образом:
[0090] a=(Vend-Vsart)/t
[0091] Стартовое ускорение «а» транспортного средства равно в этом случае 3,47 м/с2.
[0092] Самобалансирующееся транспортное средство более опасно для водителя во время старта, чем в процессе движения с крейсерской скоростью. В настоящем варианте осуществления во время старта самобалансирующегося транспортного средства выполняется защита путем ограничения скорости в соответствии с уровнем пользователя, и тем самым снижается риск получения травмы.
[0093] В одном варианте осуществления, как показано на фиг. 6, шаг S105 может быть реализован в виде следующих шагов S1051-S1052.
[0094] На шаге S1051 предварительно устанавливают стартовое ускорение самобалансирующегося транспортного средства для каждого уровня пользователя и запоминают соответствие между уровнем пользователя и стартовым ускорением в соответствии с уровнем пользователя.
[0095] На шаге S1052, исходя из запомненного соответствия, определяют стартовое ускорение, соответствующее уровню пользователя для текущего пользователя самобалансирующегося транспортного средства.
[0096] Стартовое ускорение самобалансирующегося транспортного средства устанавливают в соответствии с уровнем пользователя.
[0097] Соответствие между уровнем пользователя и стартовым ускорением самобалансирующегося транспортного средства может быть следующим.
[0098] Стартовое ускорение для новичка ограничено 0-16 км/ч>8 с.
[0099] Стартовое ускорение для начального пользователя ограничено 0-16 км/ч>7 с.
[00100] Ускорение для среднего пользователя ограничено 0-16 км/ч>5 с.
[00101] Стартовое ускорение для продвинутого пользователя ограничено 0-16 км/ч>3 с.
[00102] Приведенные выше данные могут быть установлены в соответствии с фактическими потребностями.
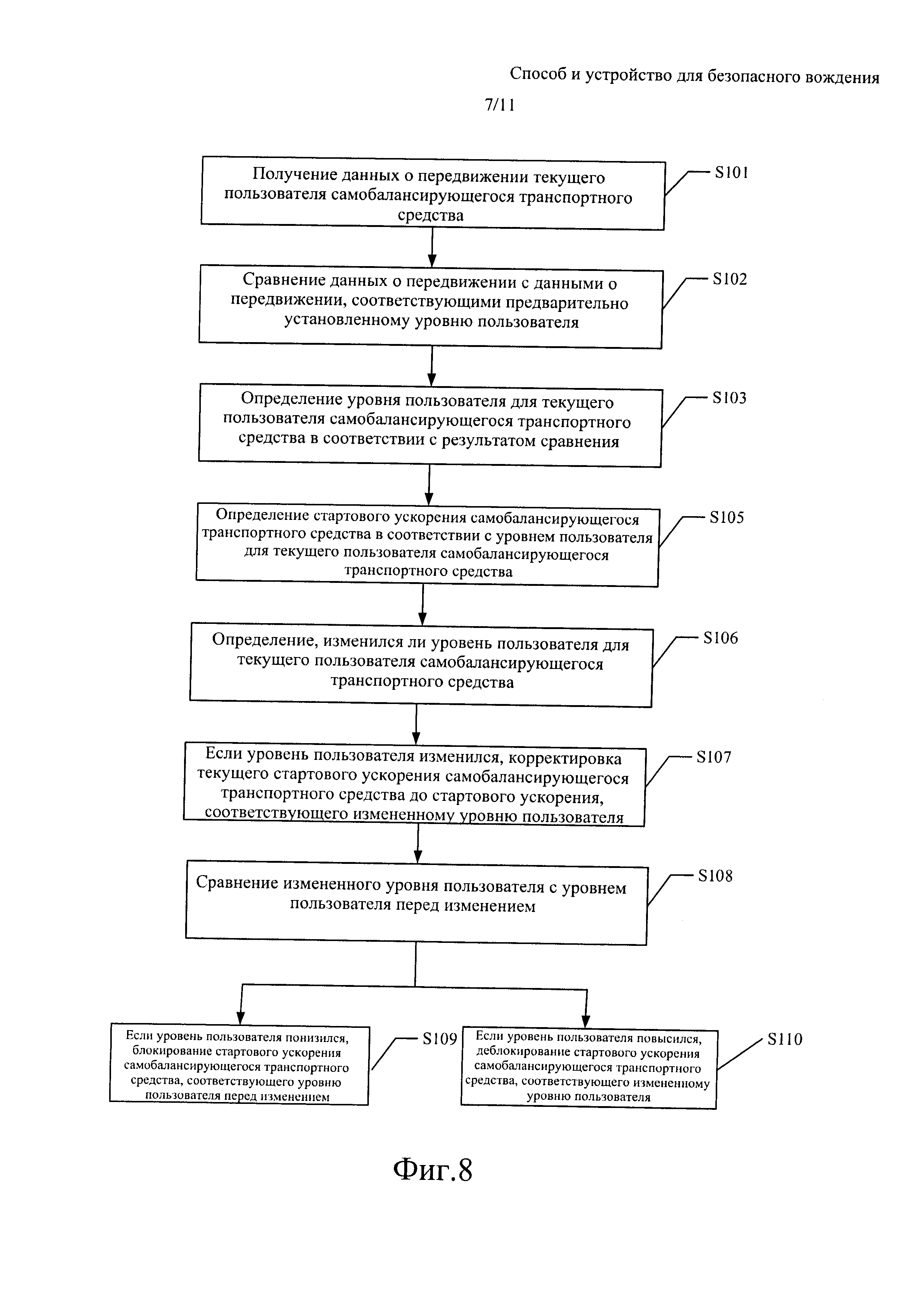
[00103] В одном варианте осуществления, как показано на фиг. 7, вышеуказанный способ может дополнительно содержать шаги S106-S107.
[00104] На шаге S106 определяют, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00105] На шаге S107, если уровень пользователя изменился, текущее стартовое ускорение самобалансирующегося транспортного средства корректируют так, чтобы оно было стартовым ускорением, соответствующим измененному уровню пользователя.
[00106] В настоящем варианте осуществления при обнаружении изменения уровня пользователя, например, когда пользователь становится более опытным и изменяет свой уровень пользователя от начального пользователя к среднему пользователю, корректируют уровень пользователя для пользователя самобалансирующегося транспортного средства и соответственно корректируют стартовое ускорение самобалансирующегося транспортного средства, тем самым удовлетворяя требования пользователя.
[00107] В одном варианте осуществления, как показано на фиг. 8, вышеуказанный способ может дополнительно содержать шаги S108-S110.
[00108] На шаге S108 измененный уровень пользователя сравнивают с уровнем пользователя перед изменением.
[00109] На шаге S109, если уровень пользователя понизился, ускорение самобалансирующегося транспортного средства, соответствующее уровню пользователя перед изменением, блокируют, и блокированное стартовое ускорение больше не разрешают использовать.
[00110] На шаге S110, если уровень пользователя повысился, стартовое ускорение самобалансирующегося транспортного средства, соответствующее измененному уровню пользователя, деблокируют.
[00111] Если самобалансирующееся транспортное средство обнаруживает изменение уровня пользователя в режиме реального времени, стартовое ускорение самобалансирующегося транспортного средства соответственно блокируют или деблокируют.
[00112] Если обнаруживается, что пользователь повышен от новичка до начального пользователя, стартовое ускорение автоматически деблокируют и поднимают от предыдущих 1-16 км/ч>8 с до 1-16 км/ч>7 с. Если обнаруживается, что пользователь ведет самобалансирующееся транспортное средство/управляет самобалансирующимся транспортным средством с пониженной устойчивостью, уровень пользователя может быть понижен в режиме реального времени для обеспечения безопасности пользователя. Например, стартовое ускорение понижается от предыдущих 1-16 км/ч>7 с до 1-16 км/ч>8 с.
[00113] Постепенное блокирование или деблокирование в основном выполняют путем оценки уровня пользователя для пользователя (путем оценки в соответствии с временем передвижения, дальностью передвижения, частотой качаний, величиной дуги качаний и временем качаний, когда пользователь едет на транспортном средстве), и при обнаружении изменения уровня пользователя (понижении или повышении) самобалансирующееся транспортное средство автоматически корректирует стартовое ускорение соответствующего уровня.
[00114] В настоящем варианте осуществления путем постепенного блокирования или деблокирования стартового ускорения самобалансирующегося транспортного средства может обеспечиваться безопасность вождения/езды пользователя.
[00115] Ниже приводятся варианты осуществления устройств в соответствии с настоящим изобретением, которые могут быть выполнены с возможностью реализации вариантов осуществления способов настоящего изобретения.
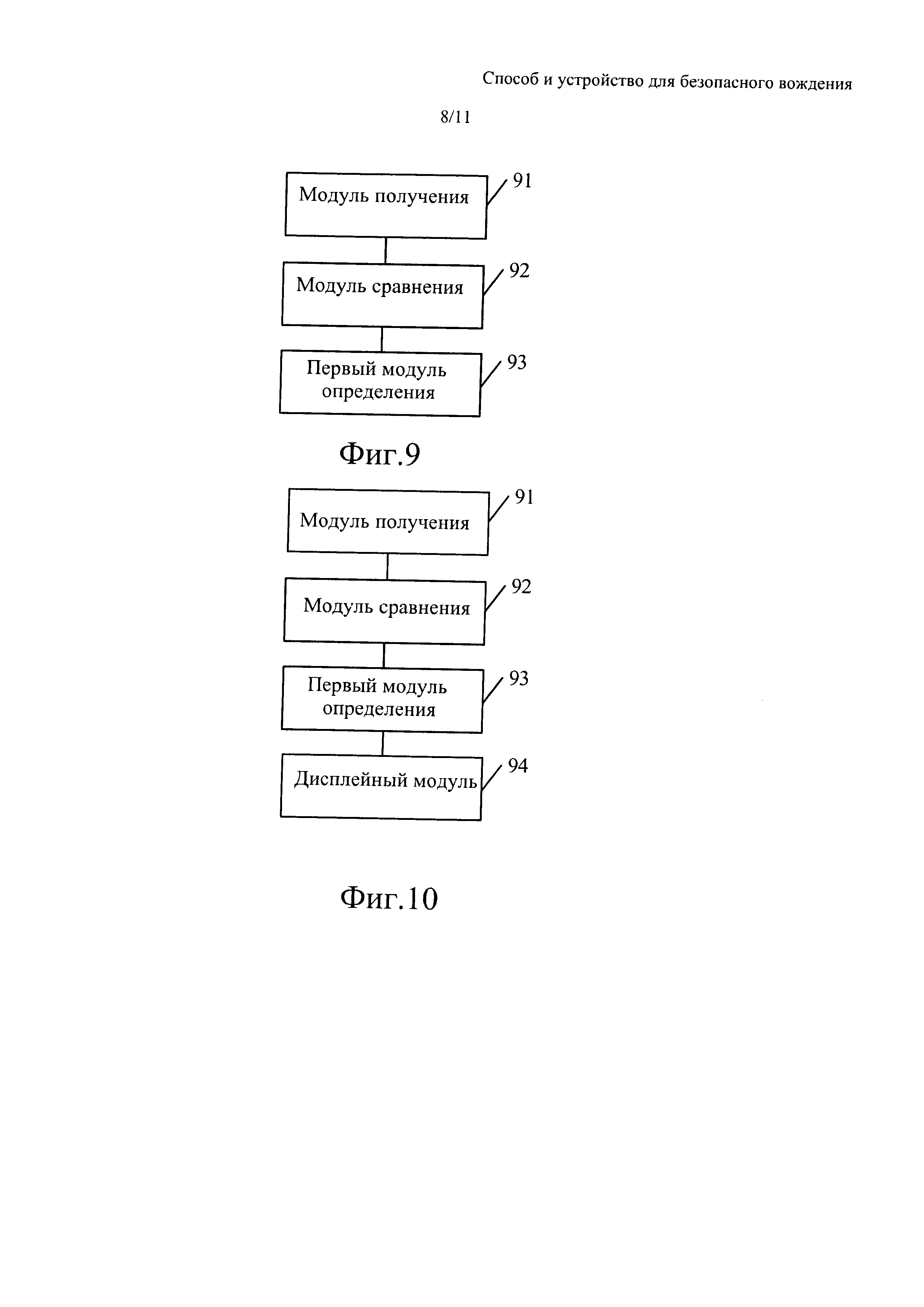
[00116] На фиг. 9 показана структурная схема устройства для безопасного вождения в соответствии с примером осуществления, и это устройство может быть реализовано в виде части или целого электрического прибора с помощью программного обеспечения, аппаратного обеспечения или их комбинации. Как показано на фиг. 9, устройство для безопасного вождения содержит следующие компоненты.
[00117] Модуль 91 получения выполнен с возможностью получать данные о передвижении текущего пользователя самобалансирующегося транспортного средства.
[00118] Модуль 92 сравнение выполнен с возможностью сравнивать эти данные о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя.
[00119] Первый модуль 93 определения выполнен с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[00120] В одном варианте осуществления данные о передвижении содержат одно или более из следующих данных.
[00121] Время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[00122] В одном варианте осуществления данные о передвижении представляют собой время передвижения или дальность передвижения.
[00123] Модуль 92 сравнения может содержать следующий компонент.
[00124] Первый подмодуль получения выполнен с возможностью получать диапазон времени передвижения или диапазон дальности передвижения, соответствующие предварительно установленному уровню пользователя, соответственно.
[00125] Первый подмодуль определения выполнен с возможностью определять диапазон времени передвижения или диапазон дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортное средство.
[00126] Первый модуль 93 определения может содержать следующий компонент.
[00127] Второй подмодуль определения выполнен с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[00128] В одном варианте осуществления данные о передвижении содержат частоту качаний, величину дуги качаний и время качаний.
[00129] Модуль 92 сравнения может дополнительно содержать следующий компонент.
[00130] Второй подмодуль получения выполнен с возможностью получать диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, соответствующие предварительно установленному уровню пользователя, соответственно.
[00131] Третий подмодуль определения выполнен с возможностью определять диапазон частоты качаний, диапазон величины дуги качаний и диапазон времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего самобалансирующегося транспортного средства.
[00132] Третий модуль 93 определения может дополнительно содержать следующий компонент.
[00133] Четвертый подмодуль определения выполнен с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном частоты качаний, диапазоном величины дуги качаний и диапазоном времени качаний, в которые попадает текущий пользователь самобалансирующегося транспортного средства.
[00134] В одном варианте осуществления, когда данные о передвижении включают по меньшей мере частоту качаний, величину дуги качаний и время качаний, устройство может дополнительно содержит следующий компонент.
[00135] Второй модуль определения выполнен с возможностью определять уровень пользователя для текущего пользователя самобалансирующегося транспортного средства как уровень пользователя, определенный в соответствии с частотой качаний, величиной дуги качаний и временем качаний текущего пользователя самобалансирующегося транспортного средства.
[00136] В одном варианте осуществления, как показано на фиг. 10, устройство может дополнительно содержать следующий компонент.
[00137] Дисплейный модуль 94 выполнен с возможностью отображать уровень пользователя для текущего пользователя самобалансирующегося транспортного средства.
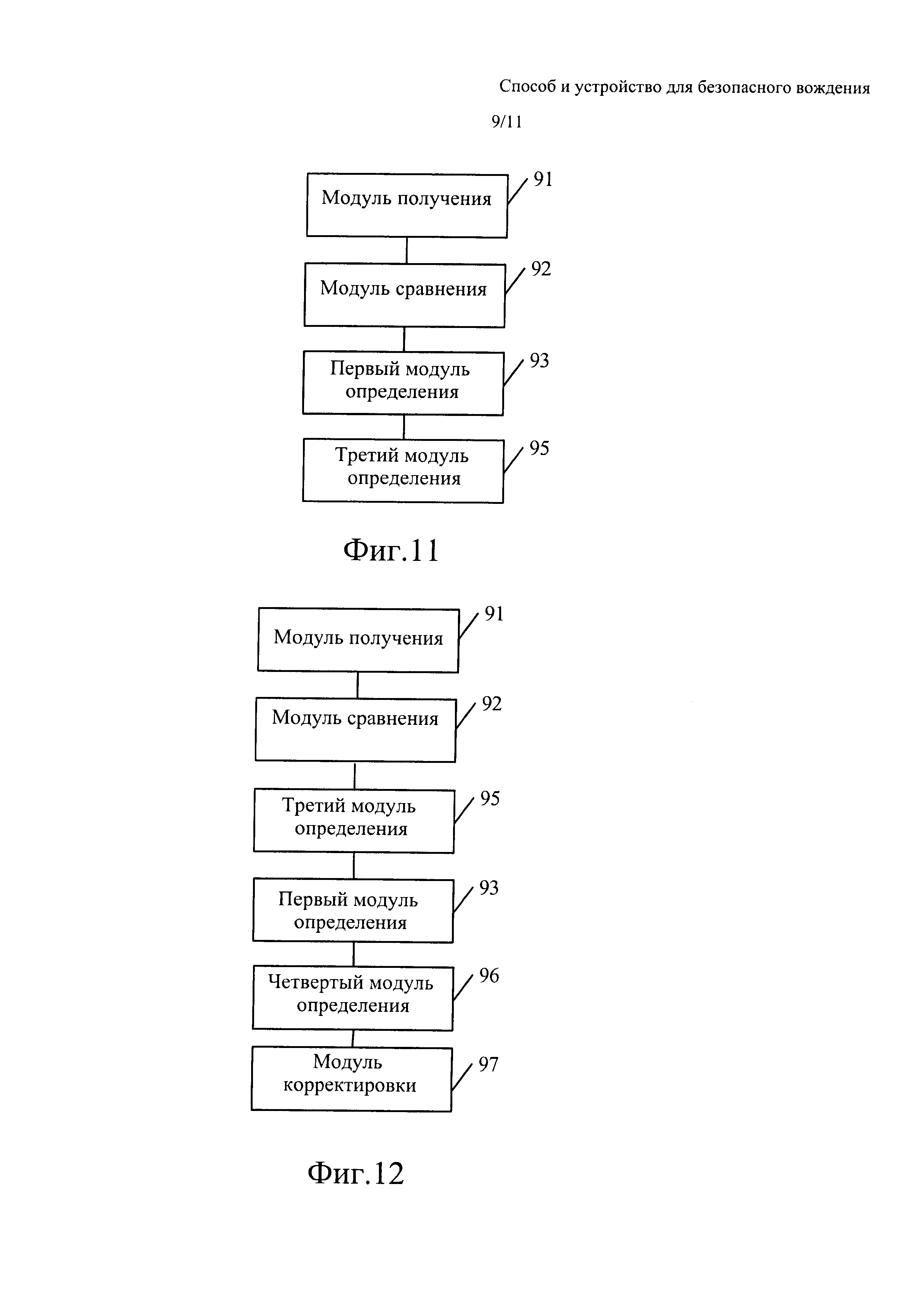
[00138] В одном варианте осуществления, как показано на фиг. 11, устройство может дополнительно содержать следующий компонент.
[00139] Третий модуль 95 определения выполнен с возможностью определять стартовое ускорение самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00140] В одном варианте осуществления третий модуль 95 определения может содержать следующий компонент.
[00141] Подмодуль памяти выполнен с возможностью предварительно устанавливать стартовое ускорение для каждого уровня пользователя и запоминать соответствие между уровнем пользователя и стартовым ускорением, соответствующим уровню пользователя; и
[00142] Пятый подмодуль определения выполнен с возможностью определять стартовое ускорение, соответствующее уровню пользователя для текущего пользователя самобалансирующегося транспортного средства, исходя из запомненного соответствия.
[00143] В одном варианте осуществления, как показано на фиг. 12, устройство может дополнительно содержать следующий компонент.
[00144] Четвертый модуль 96 определения выполнен с возможностью определять, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства; и
[00145] Модуль 97 корректировки выполнен с возможностью корректировать текущее стартовое ускорение самобалансирующегося транспортного средства до стартового ускорения, соответствующего измененному уровню пользователя, если уровень пользователя изменился.
[00146] В одном варианте осуществления, как показано на фиг. 13, устройство может дополнительно содержать следующий компонент.
[00147] Модуль 98 сравнения выполнен с возможностью сравнивать измененный уровень пользователя с уровнем пользователя перед изменением;
[00148] Модуль 99 блокировки выполнен с возможностью блокировать стартовое ускорение самобалансирующегося транспортного средства, соответствующее уровню пользователя перед изменением, если уровень пользователя понизился; и
[00149] Модуль 100 деблокировки выполнен с возможностью деблокировать стартовое ускорение самобалансирующегося транспортного средства, соответствующее измененному уровню пользователя, если уровень пользователя повысился.
[00150] В соответствии с вышеуказанным устройством вариантов осуществления настоящего изобретения получают данные о передвижении текущего пользователя самобалансирующегося транспортного средства, эти данные о передвижении сравнивают с данными о передвижении, соответствующими предварительно установленному уровню пользователя, и определяют уровень пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения. Соответственно, после того, как водитель подтверждает свой собственный уровень, водителю может быть напомнено скорректировать скорость, ускорение и т.д. самобалансирующегося транспортного средства в соответствии с его собственным уровнем, чтобы обеспечить безопасность водителя.
[00151] Варианты осуществления настоящего изобретения дополнительно предлагает устройство для безопасного вождения, устройство содержит процессор и память для хранения команд, исполняемых процессором.
[00152] Процессор выполнен с возможностью выполнять: получение данных о передвижении текущего пользователя самобалансирующегося транспортного средства; сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, и определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[00153] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: данные о передвижении могут включать одно или более из следующих данных: время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[00154] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять следующее: если данные о передвижении содержат время передвижения или дальность передвижения, получение диапазона времени передвижения или диапазона дальности передвижения, соответствующих предварительно установленному уровню пользователя, соответственно, определение диапазона времени передвижения или диапазона дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства, и определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[00155] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять следующее: если данные о передвижении содержат частоту качаний, величину дуги качаний и время качаний, получение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, соответствующих предварительно установленному уровню пользователя, соответственно, определение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего пользователя самобалансирующегося транспортного средства.
[00156] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: отображение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00157] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: определение стартового ускорения самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00158] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: предварительную установку стартового ускорения для каждого уровня пользователя и запоминание соответствия между уровнем пользователя и стартовым ускорением, соответствующего уровню пользователя; и определение стартового ускорения, соответствующего уровню пользователю для текущего пользователя самобалансирующегося транспортного средства, исходя из запомненного соответствия.
[00159] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: определение, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства; и, если уровень пользователя изменился, корректировку текущего стартового ускорения самобалансирующегося транспортного средства до стартового ускорения, соответствующего измененному уровню пользователя
[00160] Вышеуказанный процессор может быть дополнительно выполнен с возможностью выполнять: сравнение измененного уровня пользователя с уровнем пользователя перед изменением; если уровень пользователя понизился, блокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего уровню пользователя перед изменением; и, если уровень пользователя повысился, деблокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего измененному уровню пользователя.
[00161] На фиг. 14 показана структурная схема устройства для безопасного вождения, которое применимо в терминальном устройстве в соответствии с примером осуществления. Например, устройство 1200 может представлять собой мобильный телефон, компьютер, цифровой широковещательный терминал, устройство передачи сообщений, игровую консоль, планшетный компьютер, медицинское устройство, тренажер, персональный цифровой помощник и тому подобное.
[00162] Устройство 1200 может содержать один или более из следующих компонентов: компонент 1202 обработки, память 1204, компонент 1206 питания, мультимедийный компонент 1208, аудиокомпонент 1210, интерфейс 1212 ввода/вывода (I/O), измерительный компонент 1214 и компонент 1216 связи.
[00163] Компонент 1202 обработки, как правило, управляет всеми операциями устройства 1200, например операциями, связанными с отображением, телефонными звонками, передачей данных, операциями с камерой и операциями записи. Компонент 1202 обработки может содержать один или более процессоров 1220 для исполнения команд с целью выполнения всех или части шагов вышеуказанных способов. Более того, компонент 1202 обработки может содержать один или более модулей, которые облегчают взаимодействие между компонентом 1202 обработки и другими компонентами. Например, компонент 1202 обработки может содержать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1208 и компонентом 1202 обработки
[00164] Память 1204 выполнена с возможностью запоминать различные виды данных для поддержки работы устройства 1200. Примеры таких данных включают в себя команды для любых приложений или способов, реализуемых на устройстве 1200, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 1204 может быть выполнена с использованием любого вида энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (static random access memory) (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory) (EEPROM), стираемое программируемое постоянное запоминающее устройство (erasable programmable read-only memory) (EPROM), программируемое постоянное запоминающее устройство (programmable read-only memory) (PROM), постоянное запоминающее устройство (read-only memory) (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00165] Компонент 1206 питания обеспечивает питанием различные компоненты устройства 1200. Компонент 1206 питания может содержать систему управления питанием, один или более источников питания и любые другие компоненты, связанные с производством, управлением и распределением энергии в устройстве 1200.
[00166] Мультимедийный компонент 1208 содержит экран, создающий выходной интерфейс между устройством 1200 и пользователем. В некоторых вариантах осуществления экран может содержать жидкокристаллический дисплей (liquid crystal display) (LCD) и сенсорную панель (touch panel) (TP). Если экран содержит сенсорную панель, то этот экран может быть реализован в виде сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель содержит один или более датчиков касания для восприятия касаний, скольжений и жестов на сенсорной панели. Датчики касания могут не только воспринимать границу действия касания или скольжения, но и измерять период времени и давление, связанные с действием касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 1208 содержит переднюю и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные, в то время как устройство 1200 находится в рабочем режиме, например режиме фотографирования или видеорежиме. Каждая из передней камеры и задней камеры может быть системой с фиксированными оптическими линзами или иметь способность к фокусировке и оптическому увеличению.
[00167] Аудиокомпонент 1210 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 1210 содержит микрофон ("MIC"), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 1200 находится в режиме работы, например режиме вызова, режиме записи и режиме распознавания голоса. Полученный аудиосигнал может быть далее запомнен в памяти 1204 или передан посредством компонента 1216 связи. В некоторых вариантах осуществления аудиокомпонент 1210 дополнительно содержит динамик для вывода аудиосигналов.
[00168] Интерфейс 1212 ввода/вывода предлагает интерфейс между компонентом 1202 обработки и периферийными интерфейсными модулями, например клавиатурой, колесом прокрутки, кнопками и т.п. Кнопки могут содержать, но не ограничивается этим, кнопку «домой», кнопку громкости, пусковую кнопку и кнопку блокировки.
[00169] Измерительный компонент 1214 содержит один или более датчиков, выполненных с возможностью обеспечивать оценку состояния различных аспектов устройства 1200. Например, измерительный компонент 1214 может обнаруживать открытое/закрытое состояние устройства 1200, относительное расположение компонентов, например дисплея и малой клавиатуры, устройства 1200, изменение в положении устройства 1200 или компонента устройства 1200, наличие или отсутствие контакта между пользователем и устройством 1200, ориентацию или ускорение/замедление устройства 1200, и изменение температуры устройства 1200. Измерительный компонент 1214 может включать датчик близости, выполненный с возможностью обнаруживать присутствие близлежащих объектов без какого-либо физического контакта. Измерительный компонент 1214 может также включать датчик света, например датчик изображения на структуре комплементарный металл-оксид-полупроводник (Complementary Metal Oxide Semiconductor) (CMOS, КМОП) или приборе с зарядовой связью (Charge Coupled Device) (CCD, ПЗС), для использования в применении, связанном с изображением. В некоторых вариантах осуществления измерительный компонент 1214 может также включать акселерометрический датчик, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[00170] Компонент 1216 связи выполнен с возможностью содействовать связи, проводной или беспроводной, между устройством 1200 и другими устройствами. Устройство 1200 может получить доступ к беспроводной сети на основе стандарта связи, например беспроводного интернета (WiFi), сети 2-го поколения (2G) или 3-го поколения (3G), или их комбинации. В одном примере осуществления компонент 1216 связи принимает широковещательный сигнал или связанную с широковещанием информацию из внешней системы управления широковещанием через широковещательный канал. В одном примере осуществления компонент 1216 связи дополнительно содержит модуль коммуникации ближнего поля (Near Field Communication) (NFC) для облегчения коммуникации ближнего радиуса действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (Radio Frequency Identification) (RFID), технологии Ассоциации по инфракрасной технологии передачи данных (Infrared Data Association) (IrDA), технологии сверхширокополосной передачи данных (Ultra-WideBand) (UWB), технологии Bluetooth (ВТ) и других технологий.
[00171] В примерах осуществления устройство 1200 может быть реализовано с помощью одной или более специализированных интегральных схем (Application Specific Integrated Circuit) (ASIC), цифровых сигнальных процессоров (Digital Signal Processor) (DSP), устройств цифровой обработки сигналов (Digital Signal Processing Device) (DSPD), программируемых логических устройств (Programmable Logic Device) (PLD), программируемых вентильных матриц (Field Programmable Gate Array) (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных элементов для выполнения вышеописанных способов.
[00172] В примерах осуществления также предлагается машиночитаемый носитель данных, содержащий команды, например включенные в состав памяти 1204, исполняемые процессором 1220 в устройстве 1200 для выполнения описанных выше способов. Например, машиночитаемым носителем может быть ПЗУ (ROM), ОЗУ (RAM), компакт-диск (Compact Disc Read-Only Memory) (CD-ROM), магнитная лента, гибкий диск, оптическое устройство для хранения информации и тому подобное.
[00173] Машиночитаемый носитель данных, когда команды в нем выполняются процессором устройства 1200, побуждает устройство 1200 выполнять вышеупомянутый способ безопасного вождения, который содержит: получение данных о передвижении текущего пользователя самобалансирующегося транспортного средства, сравнение этих данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, и определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения.
[00174] В одном варианте осуществления данные о передвижении могут включать одно или более из следующих данных: время передвижения, дальность передвижения, частота качаний, величина дуги качаний и время качаний.
[00175] В одном варианте осуществления данные о передвижении содержат время передвижения или дальность передвижения, и сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, может содержать: получение диапазона времени передвижения или диапазона дальности передвижения, соответствующих предварительно установленному уровню пользователя, соответственно; и определение диапазона времени передвижения или диапазона дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства, и определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения может содержать: определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном времени передвижения или диапазоном дальности передвижения, в которые попадают время передвижения или дальность передвижения текущего пользователя самобалансирующегося транспортного средства.
[00176] В одном варианте осуществления данные о передвижении могут включать частоту качаний, величину дуги качаний и время качаний, и сравнение данных о передвижении с данными о передвижении, соответствующими предварительно установленному уровню пользователя, может содержать: получение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, соответственно; и определение диапазона частоты качаний, диапазона величины дуги качаний и диапазона времени качаний, в которые попадают частота качаний, величина дуги качаний и время качаний текущего пользователя самобалансирующегося транспортного средства, и определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения может содержать: определение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с диапазоном частоты качаний, диапазоном величины дуги качаний и диапазоном времени качаний, в которые попадает текущий пользователь самобалансирующегося транспортного средства.
[00177] В одном варианте осуществления способ может дополнительно содержать: отображение уровня пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00178] В одном варианте осуществления, после определения уровня пользователя для текущего пользователя самобалансирующегося транспортного средства в соответствии с результатом сравнения, способ может дополнительно содержать: определение стартового ускорения самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства.
[00179] В одном варианте осуществления определение стартового ускорения самобалансирующегося транспортного средства в соответствии с уровнем пользователя для текущего пользователя самобалансирующегося транспортного средства может содержать: предварительную установку стартового ускорения для каждого уровня пользователя и запоминание соответствия между уровнем пользователя и стартовым ускорением, соответствующим уровню пользователя; и определение стартового ускорения, соответствующего уровню пользователя для текущего пользователя самобалансирующегося транспортного средства, исходя из запомненного соответствия.
[00180] В одном варианте осуществления способ может дополнительно содержать: определение, изменился ли уровень пользователя для текущего пользователя самобалансирующегося транспортного средства; и, если уровень пользователя изменился, корректировку текущего стартового ускорения самобалансирующегося транспортного средства до стартового ускорения самобалансирующегося транспортного средства, соответствующего измененному уровню пользователя.
[00181] В одном варианте осуществления способ может дополнительно содержать: сравнение измененного уровня пользователя с уровнем пользователя перед изменением; если уровень пользователя понизился, блокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего уровню пользователя перед изменением; и если уровень пользователя повысился, деблокирование стартового ускорения самобалансирующегося транспортного средства, соответствующего измененному уровню пользователя.
[00182] Другие варианты осуществления настоящего изобретения будут очевидны для специалистов в данной области из рассмотрения описания и практического осуществления настоящего изобретения, раскрытого в настоящем документе. Эта заявка предназначена для охвата любых вариантов, применений или адаптаций настоящего изобретения, следующих из общих принципов изобретения и включающих в себя такие отклонения от настоящего изобретения, которые находятся в пределах известной или обычной практики в данной области техники. Предполагается, что описание и примеры следует рассматривать только как иллюстративные, с истинными объемом и сущностью настоящего изобретения, указанными в формуле изобретения.
[00183] Следует понимать, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть произведены в объеме настоящего изобретения. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
Способ и устройство для оптического распознавания отпечатка пальца и считываемый компьютером носитель данных
Мобильный терминал, способ управления экраном, устройство управления экраном и носитель информации
Модуль беспроводного управления, беспроводной настенный выключатель, питаемое устройство и система
Мобильный терминал, способ управления антенной и носитель данных
Выдвижной модуль камеры и терминал
Способ и устройство для передачи запроса планирования
Способ и устройство для предоставления информации, а также способ и устройство для работы на основе частей полосы частот
Способ и устройство для активирования состояния индикатора конфигурации передачи и носитель информации
Способ и устройство для указания информации и интерпретации информации, базовая станция и пользовательское оборудование
Способ и устройство для доступа к базовой станции
Способ и аппарат для осуществления операции очистки посредством очистительного устройства и читаемый носитель данных
Способ и устройство для управления интеллектуальным фонариком и интеллектуальное устройство
Способ и устройство для управления будильником

