Результат интеллектуальной деятельности: СПОСОБ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ ОПЕРАЦИИ ОЧИСТКИ ПОСРЕДСТВОМ ОЧИСТИТЕЛЬНОГО УСТРОЙСТВА И ЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ
Вид РИД
Изобретение
Перекрестная ссылка на родственную заявку
Настоящая заявка испрашивает приоритет на основании патентной заявки Китая № 201710546916.0, поданной 6 июля 2017 г., содержание которой в полном объеме включено в настоящий документ путем ссылки.
Область техники
Варианты настоящего изобретения относятся, в целом, к области технологии «умный дом», в частности, к способу и аппарату для осуществления операции очистки посредством очистительного устройства, а также к читаемому носителю данных.
Уровень техники
На сегодняшний день, для повышения комфорта и удобства в доме предлагается множество видов оборудования системы «умный дом», одним из которых является интеллектуальное очистительное устройство, способное автоматически осуществлять уборку помещений и обработку для удаления пыли. интеллектуальное очистительное устройство также может именоваться как робот-уборщик, автоматический очиститель, интеллектуальный пылеуловитель и т.д. По сути, интеллектуальное очистительное устройство представляет собой автоматизированное подвижное устройство, которое, соответственно, может автоматически перемещаться назад и вперед в помещении и при этом автоматически очищать помещение для обеспечения антропоморфного эффекта уборки дома. Например, очистительное устройство выполняет уборку вдоль краев в углах помещения во время осуществления операции очистки или произвольно выполняет уборку помещения и т.д. Современное очистительное устройство осуществляет операцию очистки единообразно, однако может срочно потребоваться внедрить разноплановый подход к осуществлению операции очистки, который позволит очистительному устройству осуществлять операцию очистки более аккуратно.
Раскрытие изобретения
Для решения проблемы в соответствующей области техники, в различных вариантах настоящего изобретения предложены способ и аппарат для осуществления операции очистки посредством очистительного устройства, а также читаемый носитель данных.
Согласно первому аспекту в различных вариантах настоящего изобретения предложен способ осуществления операции очистки посредством очистительного устройства, который может включать в себя следующие действия.
Оценивают, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии. При этом интеллектуальное устройство расположено на части конечности пользователя.
Если очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии, получают первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство.
Осуществляют операцию очистки в соответствии с первым географическим местоположением и заданным режимом очистки.
В другом варианте настоящего изобретения, действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки может включать в себя следующие действия.
Если заданный режим очистки представляет собой первый режим очистки, то в соответствии с первым географическим местоположением определяют первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Управляют очистительным устройством для осуществления операции очистки в зоне, отличной от первой географической зоны.
Первый режим очистки может относиться к очистке обходного типа, во время которой очистительное устройство осуществляет операцию очистки в зоне, отличной от первой географической зоны.
В другом варианте настоящего изобретения способ может дополнительно включать в себя следующие действия.
Получают плоскую карту зон для сценария, в котором в текущий момент находится очистительное устройство.
В соответствии с плоской картой зон определяют пределы перемещений в пространстве для одной или более географических зон, входящих в сценарий, в котором в текущий момент находится очистительное устройство.
Сохраняют соответствующие соотношения между географическими зонами и пределами перемещений в пространстве.
Действие по определению первой географической зоны, в которой в текущий момент расположено интеллектуальное устройство, согласно первому географическому местоположению включает в себя следующие действия.
Определяют, находится ли первое географическое местоположение в одном из пределов перемещений в пространстве в соответствующих соотношениях.
Если первое географическое местоположение находится в одном из пределов перемещений в пространстве, географическую зону, соответствующую указанному пределу перемещений в пространстве, определяют в качестве первой географической зоны.
В другом варианте настоящего изобретения, действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки может включать в себя следующие действия.
Если заданный режим очистки представляет собой второй режим очистки, оценивают, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения.
Если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значения, операцию очистки осуществляют в соответствии с траекторией движения интеллектуального устройства.
Второй режим очистки может относиться к очистке следящему типу, во время которой расстояние между очистительным устройством и интеллектуальным устройством не меньше предварительно заданного порогового значения.
В другом варианте настоящего изобретения, действие по осуществлению операции очистки в соответствии с траекторией движения интеллектуального устройства может включать в себя следующие действия.
Получают траекторию движения интеллектуального устройства.
В режиме реального времени во время операции очистки, осуществляемой в соответствии с траекторией движения, получают текущее расстояние между очистительным устройством и интеллектуальным устройством.
Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, то управляют очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжают осуществлять операцию очистки в соответствии с указанной траекторией движения.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки может включать в себя следующие действия.
Если заданный режим очистки представляет собой второй режим очистки, оценивают, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения.
Если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значения, то в соответствии с первым географическим местоположением определяют географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Осуществляют операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в первой географической зоне может включать в себя следующие действия.
В режиме реального времени во время очистки первой географической зоны получают текущее расстояние между очистительным устройством и интеллектуальным устройством.
Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управляют очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжают осуществлять операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки может включать в себя следующие действия.
В соответствии с первым географическим местоположением определяют первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Определяют заданную продолжительность пребывания пользователя в первой географической зоне.
В зависимости от предварительно заданных соответствующих соотношений между продолжительностями пребывания и степенями интенсивности очистки получают заданную степень интенсивности очистки, соответствующую заданной продолжительности пребывания.
Операцию очистки осуществляют в соответствии с заданной степенью интенсивности очистки и заданным режимом очистки.
Согласно второму аспекту в различных вариантах настоящего изобретения предложен аппарат для осуществления операции очистки посредством очистительного устройства, который может содержать модуль оценки, первый модуль получения и модуль осуществления.
Модуль оценки выполнен с возможностью оценки того, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии, при этом интеллектуальное устройство расположено на части конечности пользователя.
Первый модуль получения выполнен так, чтобы, если очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии, получать первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство.
Модуль осуществления выполнен с возможностью осуществления операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки.
В другом варианте настоящего изобретения модуль осуществления может быть дополнительно выполнен так, чтобы, если заданный режим очистки представляет собой первый режим очистки, определять, в соответствии с первым географическим местоположением, первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, и управлять очистительным устройством для осуществления им операции очистки в зоне, отличной от первой географической зоны.
Первый режим очистки может относиться к очистке обходного типа, во время которой очистительное устройство осуществляет операцию очистки в зоне, отличной от первой географической зоны.
В другом варианте настоящего изобретения устройство может дополнительно содержать второй модуль получения, модуль определения и модуль хранения.
Второй модуль получения выполнен с возможностью получения плоской карты зон для сценария, в котором в текущий момент находится очистительное устройство.
Модуль определения выполнен с возможностью определения пределов перемещений в пространстве для одной или более географических зон, входящих в сценарий, в котором в текущий момент находится очистительное устройство, в соответствии с плоской картой зон.
Модуль хранения выполнен с возможностью сохранения соответствующих соотношений между географическими зонами и пределами перемещений в пространстве.
Модуль определения может быть дополнительно выполнен с возможностью просмотра соответствующих соотношений согласно первому географическому местоположению и, если первое местоположение находится в пределе перемещений в пространстве, заданном одной из географических зон, определения указанной географической зоны в качестве первой географической зоны.
В другом варианте настоящего изобретения модуль осуществления может быть выполнен так, чтобы, если заданный режим очистки представляет собой второй режим очистки, оценивать то, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения, и, если расстояние между первым географическим местоположением и вторым местоположением не меньше предварительно заданного порогового значения, осуществлять операцию очистки согласно траектории движения интеллектуального устройства.
Второй режим очистки может относиться к очистке следящего типа, во время которой расстояние между очистительным устройством и интеллектуальным устройством не меньше предварительно заданного порогового значения.
В другом варианте настоящего изобретения модуль осуществления может быть выполнен с возможностью получения траектории движения интеллектуального устройства, получения текущего расстояния между очистительным устройством и интеллектуальным устройством в режиме реального времени во время операции очистки, осуществляемой в соответствии с указанной траекторией движения, и, если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управления очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжило осуществлять операцию очистки с соответствии с указанной траекторией движения.
В другом варианте настоящего изобретения модуль осуществления может быть выполнен так, чтобы, если заданный режим очистки представляет собой второй режим очистки, оценивать то, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения, и, если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значения, определять, в соответствии с первым географическим местоположением, первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, и осуществлять операцию очистки в указанной первой географической зоне.
В другом варианте настоящего изобретения модуль осуществления может быть выполнен с возможностью получения текущего расстояния между очистительным устройством и интеллектуальным устройством в режиме реального времени во время очистки первой географической зоны и, если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управления очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжило осуществлять операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения модуль осуществления может быть выполнен с возможностью определения, в соответствии с первым географическим местоположением, первой географической зоны, в которой в текущий момент расположено интеллектуальное устройство, определения заданной продолжительности пребывания пользователя в первой географической зоне, получения заданной степени интенсивности очистки, соответствующей заданной продолжительности пребывания, согласно предварительно заданным соответствующим соотношениям между продолжительностями пребывания и степенями интенсивности очистки, и осуществления операции очистки согласно заданной степени интенсивности очистки и заданному режиму очистки.
Согласно третьему аспекту в различных вариантах настоящего изобретения предложен аппарат для осуществления операции очистки посредством очистительного устройства, который может содержать:
процессор, и
память, выполненную с возможностью хранения инструкции, исполняемой процессором,
причем процессор может быть выполнен с возможностью: оценки того, находится ли интеллектуальное устройство в том же самом сценарии, при этом интеллектуальное устройство расположено на части конечности пользователя, и, если интеллектуальное устройство находится в том же самом сценарии, получения первого географического местоположения, в котором в текущий момент расположено интеллектуальное устройство, и осуществления операцию очистки в соответствии с первым географическим местоположением и заданным режимом очистки.
Согласно четвертому аспекту в различных вариантах настоящего изобретения предложен читаемый носитель данных, обеспечивающий возможность хранения на нем набора компьютерных программных инструкций, причем компьютерные программные инструкции исполняются процессором для реализации способа осуществления операции очистки посредством очистительного устройства, предложенного в первом аспекте настоящего изобретения.
Технические решения, предложенные в различных вариантах настоящего изобретения, могут обеспечивать следующие положительные эффекты.
Перед осуществлением очистительным устройством операции очистки, сначала можно оценить, находятся ли очистительное устройство и интеллектуальное устройство, расположенное на части конечности пользователя, в одном и том же сценарии. Если очистительное устройство и интеллектуальное устройство в текущий момент находятся в одном и том же сценарии, очистительное устройство может получить первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство, и осуществить операцию очистки согласно указанному первому географическому местоположению и заданному режиму очистки. При этом техники выполнения очистки расширяются, в результате чего такие техники очистки становятся более разноплановыми. Кроме того, местоположение пользователя определяется на основании интеллектуального устройства, благодаря чему повышается значимость очистки, и, следовательно, такой способ осуществления операции очистки становится более интеллектуальным.
Следует понимать, что вышеизложенное общее описание и нижеследующее подробное описание приведены лишь для примера и пояснения и не ограничивают настоящее изобретение.
Краткое описание чертежей
Прилагаемые чертежи, включенные в настоящий документ и образующие часть данного описания, иллюстрируют различные варианты настоящего изобретения и, совместно с описанием, служат для пояснения принципов настоящего изобретения.
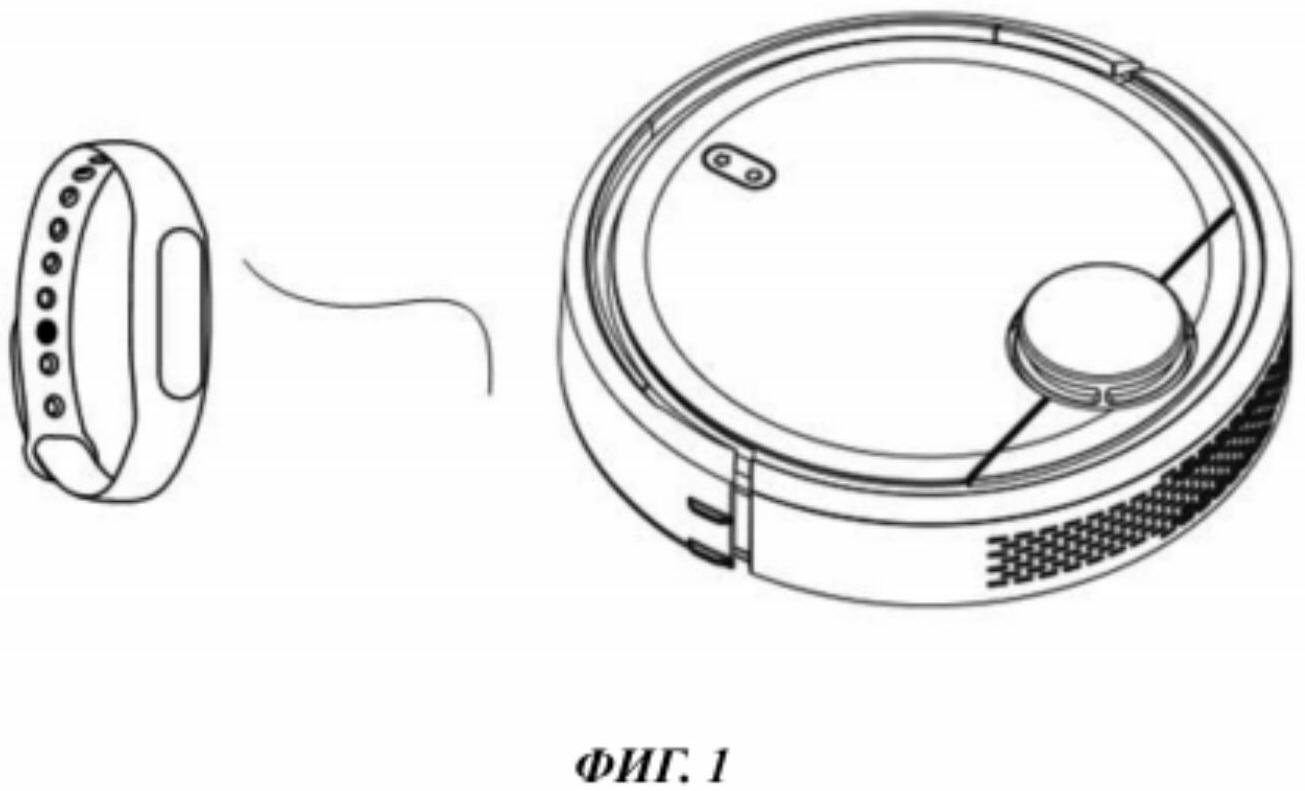
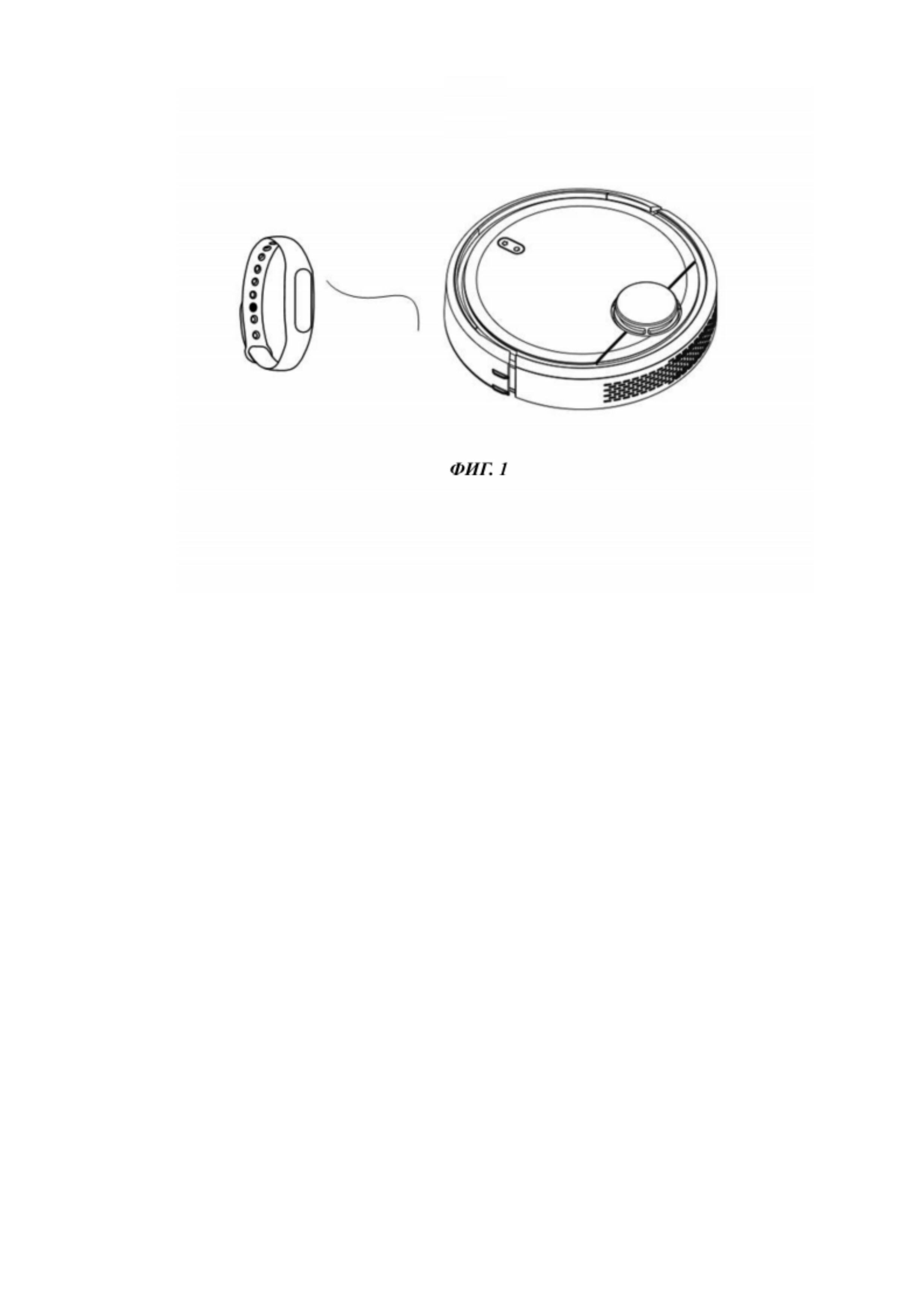
На фиг. 1 схематично проиллюстрирован сценарий реализации, связанный со способом осуществления операции очистки посредством очистительного устройства, согласно одному из примерных вариантов настоящего изобретения.
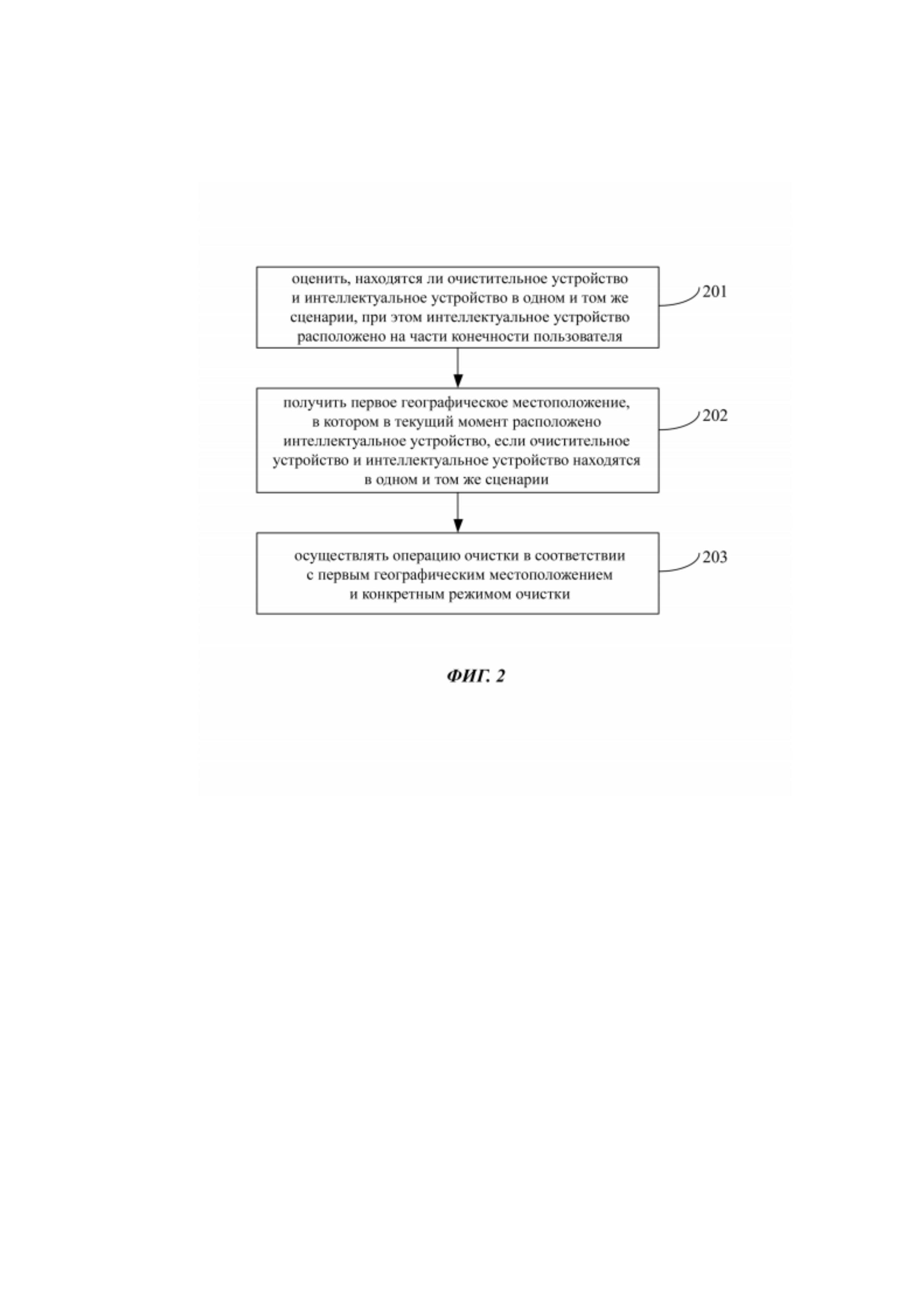
На фиг. 2 представлена блок-схема, иллюстрирующая способ осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения.
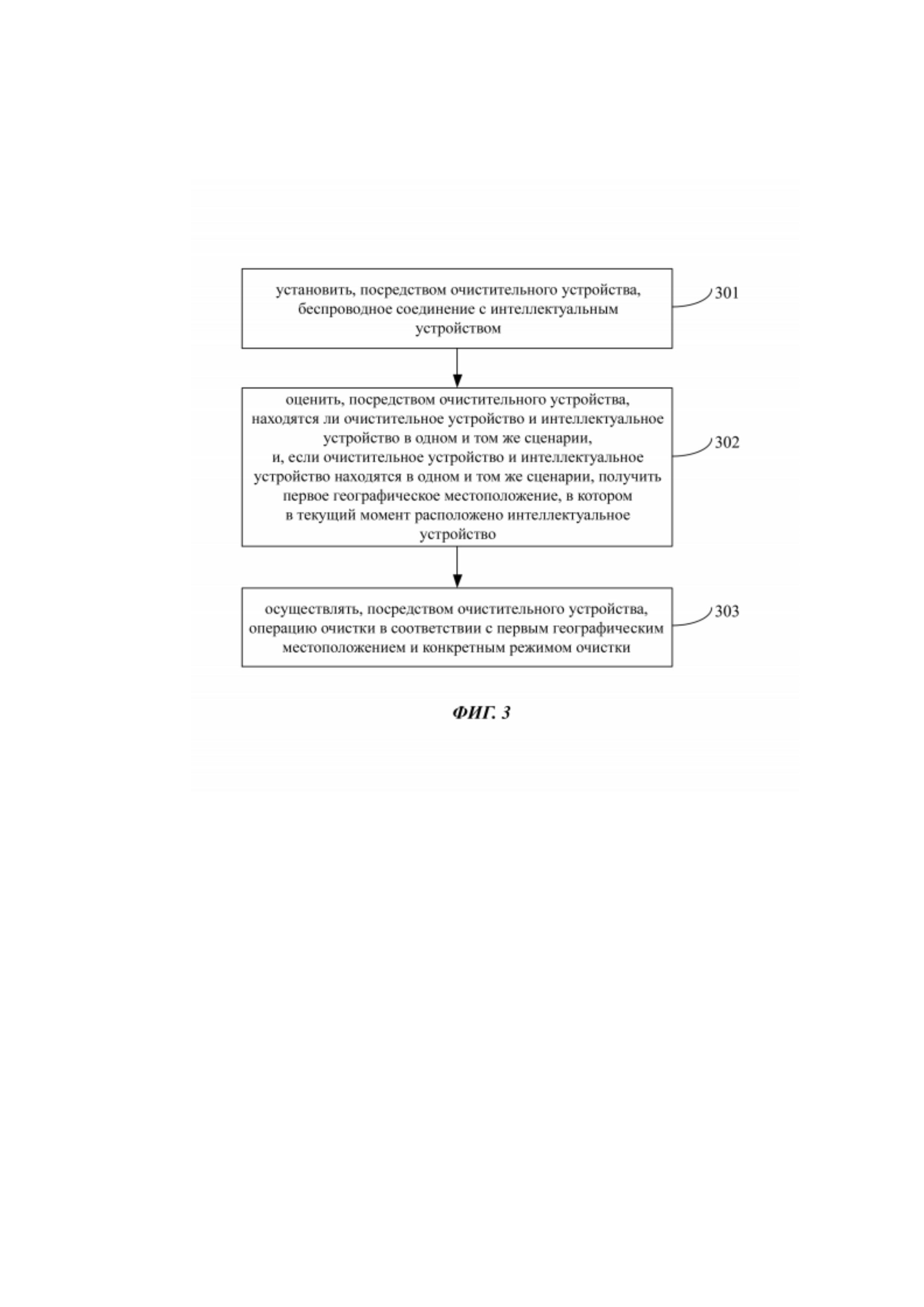
На фиг. 3 представлена блок-схема, иллюстрирующая способ осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения.
На фиг. 4 показана плоская карта зон согласно одному из примерных вариантов настоящего изобретения.
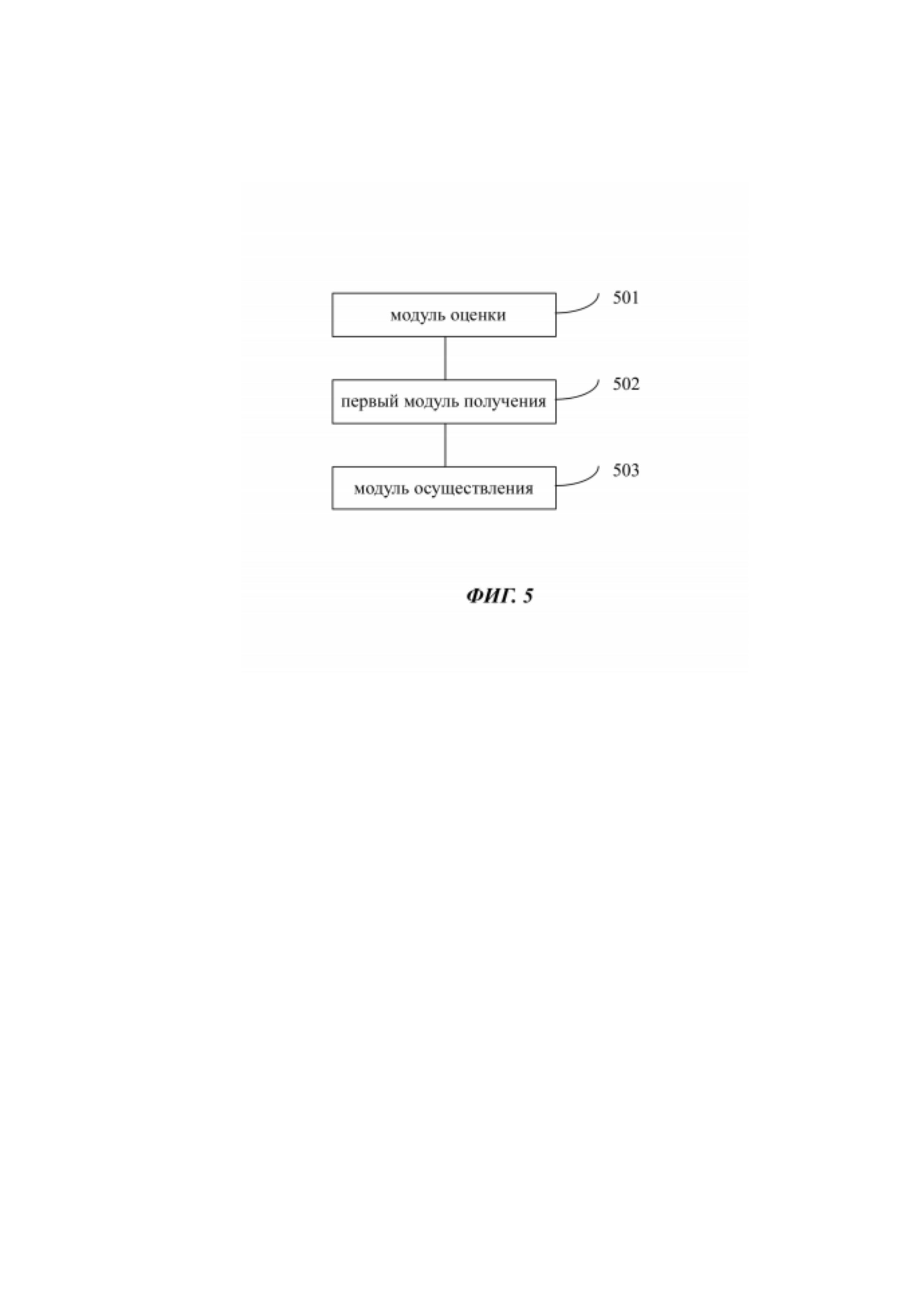
На фиг. 5 представлена схема аппарата для осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения.
На фиг. 6 представлена схема аппарата для осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения.
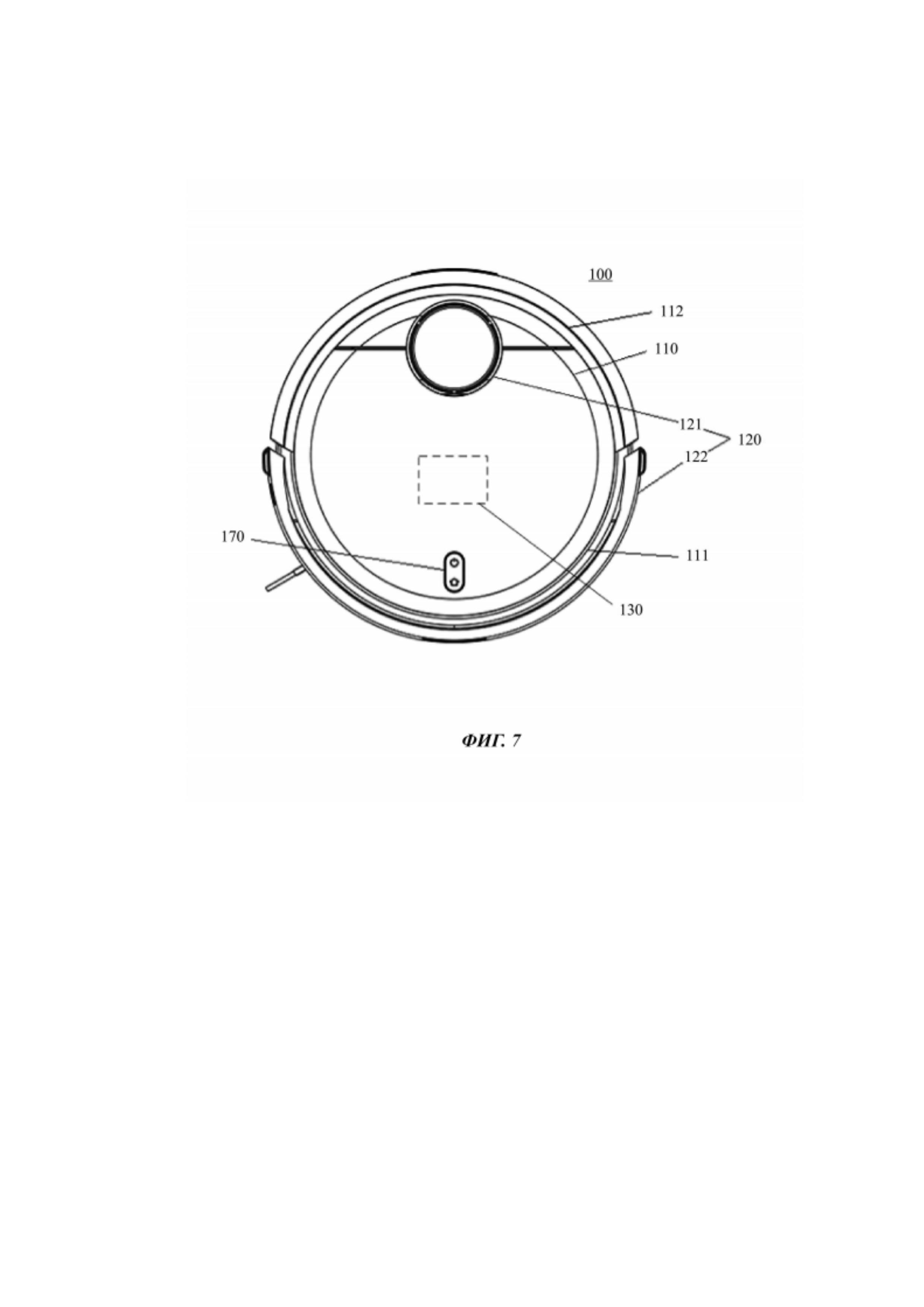
На фиг. 7 показана схема очистительного устройства согласно одному из примерных вариантов настоящего изобретения.
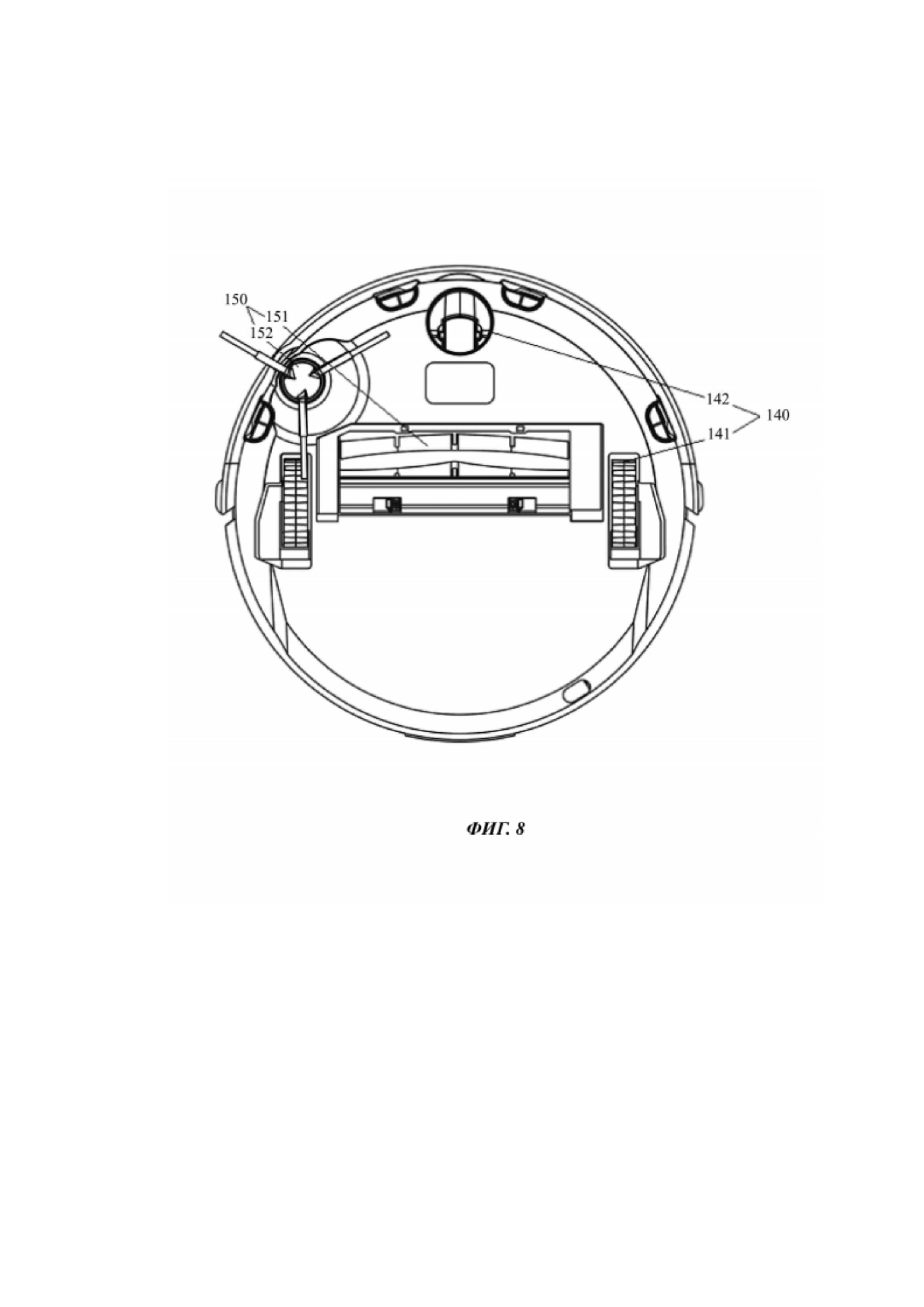
На фиг. 8 показана схема очистительного устройства согласно другому примерному варианту настоящего изобретения.
На фиг. 9 показана схема очистительного устройства согласно еще одному примерному варианту настоящего изобретения.
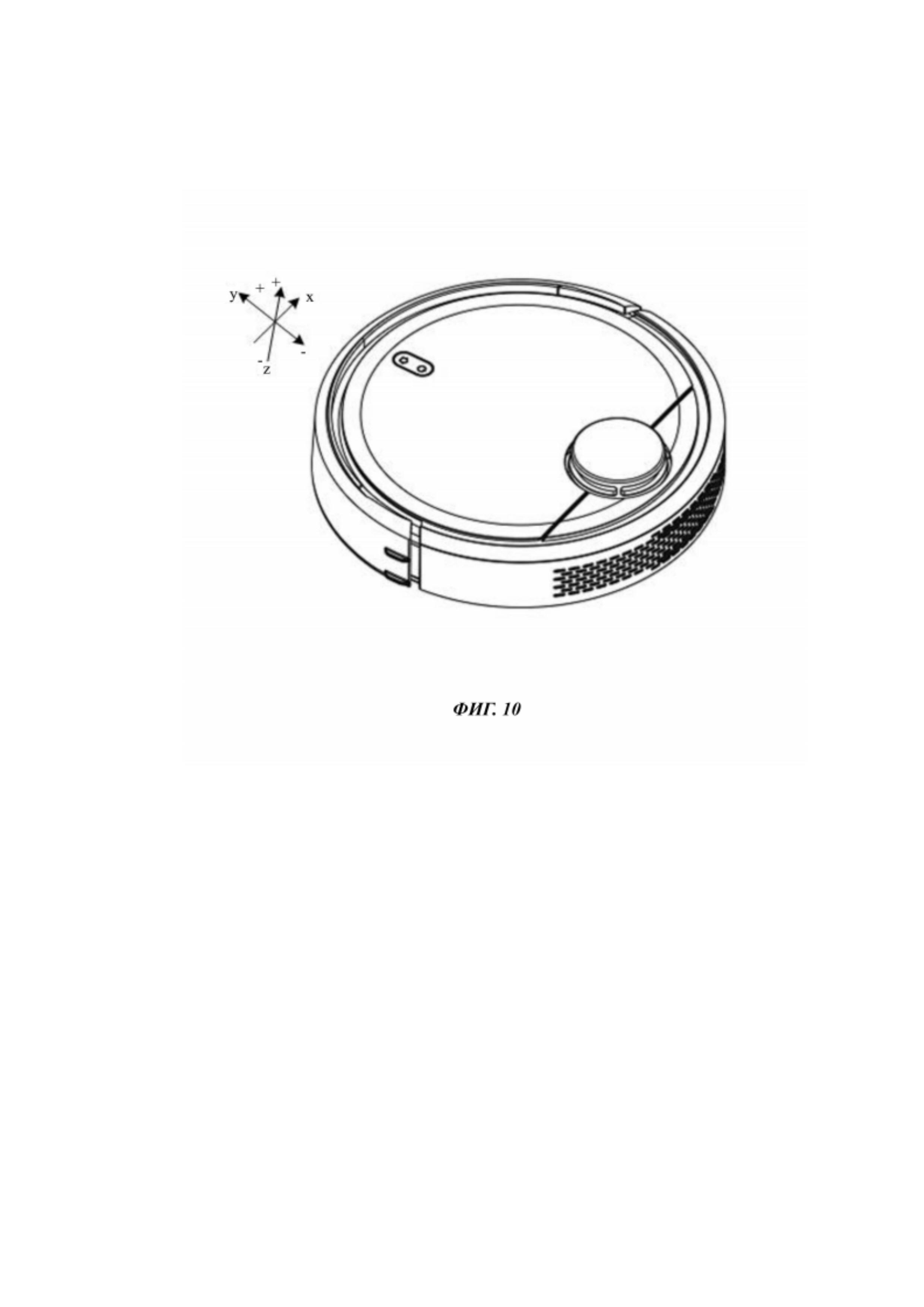
На фиг. 10 показана схема очистительного устройства согласно еще одному из примерных вариантов настоящего изобретения.
Осуществление изобретения
Далее будет приведено подробное описание предпочтительных вариантов осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Нижеследующее описание ссылается на прилагаемые чертежи, на которых на разных чертежах одинаковые номера позиций обозначают одни и те же или схожие элементы, если не указано иное. Реализации, раскрытые в нижеследующем описании примерных вариантов настоящего изобретения, не отражают все возможные варианты реализации, соответствующие настоящему изобретению. Напротив, данные реализации являются лишь примерами аппаратов и способов, соответствующими аспектам, относящимся к различным вариантам настоящего изобретения, изложенным в пунктах прилагаемой формулы.
Перед пояснением и подробным описанием различных вариантов настоящего изобретения, сначала в простой форме будет объяснен и рассмотрен сценарий для реализации различных вариантов настоящего изобретения.
На фиг. 1 схематично показан сценарий реализации, связанный со способом осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения. Как показано на фиг. 1, в данном варианте настоящего изобретения предусмотрено два устройства, то есть, очистительное устройство и интеллектуальное устройство, соответственно. интеллектуальное устройство может представлять собой смартфон, например, переносный мобильный телефон пользователя, а также может представлять собой носимое интеллектуальное оборудование, например, умный браслет или умные часы, причем такое устройство не ограничивается в данном варианте настоящего изобретения.
В одном из вариантов настоящего изобретения, если интеллектуальное устройство и очистительное устройство находятся в одном и том же сценарии, между интеллектуальным устройством и очистительным устройством устанавливают беспроводное соединение, причем тот факт, что два устройства находятся в одном и том же сценарии, обычно означает, что интеллектуальное устройство и очистительное устройство находятся в одном и том же семейном пространстве. Если очистительное устройство осуществляет операцию очистки, интеллектуальное устройство может получать географическое местоположение пользователя и отправлять указанное географическое местоположение в очистительное устройство, и далее очистительное устройство выполняет задачу очистки в соответствии с географическим местоположением пользователя и заданным режимом очистки.
На фиг. 2 представлена блок-схема, иллюстрирующая способ осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения. Как показано на фиг. 2, способ применим в отношении очистительного устройства и содержит следующие этапы.
На этапе 201, оценивают, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии, при этом интеллектуальное устройство расположено на части конечности пользователя.
На этапе 202, если очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии, получают первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство.
На этапе 203, в соответствии с первым географическим местоположением и заданным режимом очистки осуществляют операцию очистки.
Согласно способу, предложенному в данном варианте настоящего изобретения, перед осуществлением очистительным устройством операции очистки, сначала можно оценить, находятся ли очистительное устройство и интеллектуальное устройство, расположенное на части конечности пользователя, в одном и том же сценарии. Согласно одному из вариантов настоящего изобретения, очистительное устройство может быть связано с интеллектуальным устройством, которое расположено на части конечности пользователя. Если очистительное устройство и интеллектуальное устройство в текущий момент находятся в одном и том же сценарии, очистительное устройство может получить первое географическое местоположение интеллектуального устройства и осуществить операцию очистки согласно указанному первому географическому местоположению и заданному режиму очистки. При этом техники выполнения очистки расширяются, в результате чего такие техники становятся более разноплановыми. Кроме того, местоположение пользователя определяется на основании интеллектуального устройства, благодаря чему повышается значимость очистки, и, следовательно, такой способ осуществления операции очистки становится более интеллектуальным.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки включает в себя следующие действия.
Если заданный режим очистки представляет собой первый режим очистки, то в соответствии с первым географическим местоположением определяют первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Очистительным устройством управляют для осуществления им операции очистки в зоне, отличной от первой географической зоны.
Первый режим очистки может относиться к очистке обходного типа, во время которой очистительное устройство осуществляет операцию очистки в зоне, отличной от первой географической зоны.
В другом варианте настоящего изобретения способ может дополнительно включать в себя следующие действия.
Получают плоскую карту зон для сценария, в котором в текущий момент расположено очистительное устройство.
В соответствии с указанной плоской картой зон определяют пределы перемещений в пространстве для одной или более географических зон, входящих в сценарий, в котором в текущий момент находится очистительное устройство. То есть, одну или более географических зон текущего сценария определяют путем определения заданных пределов перемещений в пространстве в плоской карте зон.
Сохраняют соответствующие соотношения между географическими зонами и пределами перемещений в пространстве.
Действие по определению первой географической зоны, в которой в текущий момент расположено интеллектуальное устройство, в соответствии с первым географическим местоположением включает в себя следующие действия.
Осуществляют просмотр соответствующих соотношений согласно первому географическому местоположению.
Если первое географическое местоположение находится в пределе перемещений в пространстве, заданном одной из географических зон, указанную географическую зону определяют в качестве первой географической зоны.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки включает в себя следующие действия.
Если заданный режим очистки представляет собой второй режим очистки, то оценивают, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения.
Если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значению, осуществляют операцию очистки согласно траектории движения интеллектуального устройства.
Второй режим очистки может относиться к очистке следящего типа, во время которой расстояние между очистительным устройством и интеллектуальным устройством не меньше предварительно заданного порогового значения.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с траекторией движения интеллектуального устройства включает в себя следующие действия.
Получают траекторию движения интеллектуального устройства.
В режиме реального времени во время операции очистки, осуществляемой в соответствии с указанной траекторией движения, получают текущее расстояние между очистительным устройством и интеллектуальным устройством.
Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управляют очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжают осуществлять операцию очистки в соответствии с траекторией движения.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки включает в себя следующие действия.
Если заданный режим очистки представляет собой второй режим очистки, оценивают, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения.
Если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значения, то в соответствии с первым географическим местоположением определяют географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Осуществляют операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в первой географической зоне включает в себя следующие действия.
В режиме реального времени во время очистки первой географической зоны получают текущее расстояние между очистительным устройством и интеллектуальным устройством.
Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управляют очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжают осуществлять операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения действие по осуществлению операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки включает в себя следующие действия.
В соответствии с первым географическим местоположением определяют первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство.
Определяют заданную продолжительность пребывания пользователя в первой географической зоне.
В зависимости от предварительно заданных соответствующих соотношений между продолжительностями пребывания и степенями интенсивности очистки получают заданную степень интенсивности очистки, соответствующую заданной продолжительности пребывания.
Осуществляют операцию очистки в соответствии с заданной степенью интенсивности очистки и заданным режимом очистки.
Все упомянутые выше технические решения могут быть легко объединены в опциональные варианты настоящего изобретения, которые не будут здесь отдельно рассмотрены.
На фиг. 3 представлена блок-схема, иллюстрирующая способ осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения. Как показано на фиг. 3, способ применим в отношении очистительного устройства и содержит следующие этапы.
На этапе 301 очистительное устройство устанавливает беспроводное соединение с интеллектуальным устройством.
Интеллектуальное устройство расположено на части конечности пользователя, например, пользователь носит его на руке или держит в кисти руки. Интеллектуальное носимое оборудование обычно носится на руке пользователя, например, это может быть «умный» браслет или «умные» часы. Смартфон пользователь держит в кисти руки. В данном варианте настоящего изобретения, если интеллектуальное устройство представляет собой смартфон, то смартфон может оценить, использует ли пользователь в текущий момент смартфон, на основании того, осуществляет ли пользователь какую-либо операцию на смартфоне. Если интеллектуальное устройство представляет собой «умный» браслет, «умные» часы и т.д., то оценить то, носит ли в текущий момент пользователь «умный» браслет или «умные» часы, можно на основании того, возможно ли получение в реальном времени данных пользователя. Например, в случае «умного» браслета, если сердцебиение пользователя может быть обнаружено в текущий момент, то определяют, что пользователь в текущий момент носит «умный» браслет.
В данном варианте настоящего изобретения очистительное устройство и интеллектуальное устройство могут осуществлять передачу данных на основании беспроводного соединения, установленного между очистительным устройством и интеллектуальным устройством. Беспроводное соединение может представлять собой Bluetooth-соединение, WiFi (от англ. Wireless Fidelity) соединение, сетевое соединение для передачи данных и т.д., причем такое беспроводное соединение не ограничивается в данном варианте настоящего изобретения.
Кроме того, пользователь может дополнительно заранее устанавливать привязку между интеллектуальным устройством и очистительным устройством и сохранять указанную привязку. В таком случае, следующий этап может быть запущен только после того, как интеллектуальное устройство, соответствующее очистительному устройству, установит беспроводное соединение с очистительным устройством, что не ограничивается данным вариантом настоящего изобретения.
На этапе 302, очистительное устройство оценивает, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии, причем, если очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии, оно получает первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство.
То, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии, можно определить, помимо прочего, следующими способами.
А. В случае Bluetooth-соединения с ограничением по дальности, например, с максимальным расстоянием связи для Bluetooth-соединения менее 100 метров, если между очистительным устройством и интеллектуальным устройством установлено Bluetooth-соединение, можно определить, что очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии.
В. В случае Wi-Fi соединения с ограничением по дальности, если очистительное устройство и интеллектуальное устройство соединены в одной и той же точке доступа, то есть, если два устройства одновременно подсоединены к одному и тому же аккаунту WiFi, можно определить, что очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии.
С. В случае сетевого соединения для передачи данных, которое может представлять собой соединение мобильной связи 4-го поколения (4G), коммуникационные модули предусмотрены в обоих устройствах: и в очистительном устройстве, и в интеллектуальном устройстве, для сетевого соединения с другими устройствами для передачи данных.
Согласно данному способу соединения расстояние между очистительным устройством и интеллектуальным устройством может быть определено посредством спутниковой навигации, например, путем определения местоположения с помощью глобальной спутниковой навигационной системы GPS (от англ. Global Positioning System). Если расстояние между двумя устройствами меньше заданного порогового значения, то можно определить, что очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии. При этом величина заданного порогового значения может составлять 50 метров, 100 метров и т.д., причем данная величина не ограничивается в данном варианте настоящего изобретения. Она может быть задана пользователем в автономном режиме.
Поскольку интеллектуальное устройство расположено на части конечности пользователя, текущее местоположение пользователя может быть получено после определения местоположения интеллектуального устройства. В данном варианте настоящего изобретения интеллектуальное устройство может получать свое собственное первое географическое местоположение и свою собственную траекторию движения (то есть, путь воздействия пользователя) периодически или в режиме реального времени посредством GPS или другим способом и автоматически передавать эти данные в очистительное устройство периодически или в режиме реального времени. Далее, очистительное устройство автоматически выполняет связанную задачу очистки в соответствии с информацией о географическом местоположении после приема информации о географическом местоположении пользователя, переданной интеллектуальным устройством.
На этапе 303, очистительное устройство осуществляет операцию очистки в соответствии с первым географическим местоположением и заданным режимом очистки.
В данном варианте настоящего изобретения, в зависимости от различных режимов очистки, очистительное устройство осуществляет, помимо прочего, следующие операции очистки после получения первого географического местоположения пользователя.
При первом условии / в первом режиме очистки, очистительное устройство и интеллектуальное устройство находятся в различных географических зонах. То есть, первый режим очистки относится к очистке обходного типа, во время которой очистительное устройство осуществляет операцию очистки в зоне, отличное от первой географической зоны, в которой в текущий момент расположено интеллектуальное устройство.
Для такого условия, поскольку заданный режим очистки, предварительно установленный пользователем, представляет собой очистку в обход пользователя, очистительному устройству дополнительно требуется определить первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство (то есть, пользователь), в соответствии с первым географическим местоположением после приема в режиме реального времени информации о географическом местоположении, отправленной интеллектуальным устройством, причем им дополнительно управляют так, чтобы оно осуществляло операцию очистки в зоне, отличной от первой географической зоны.
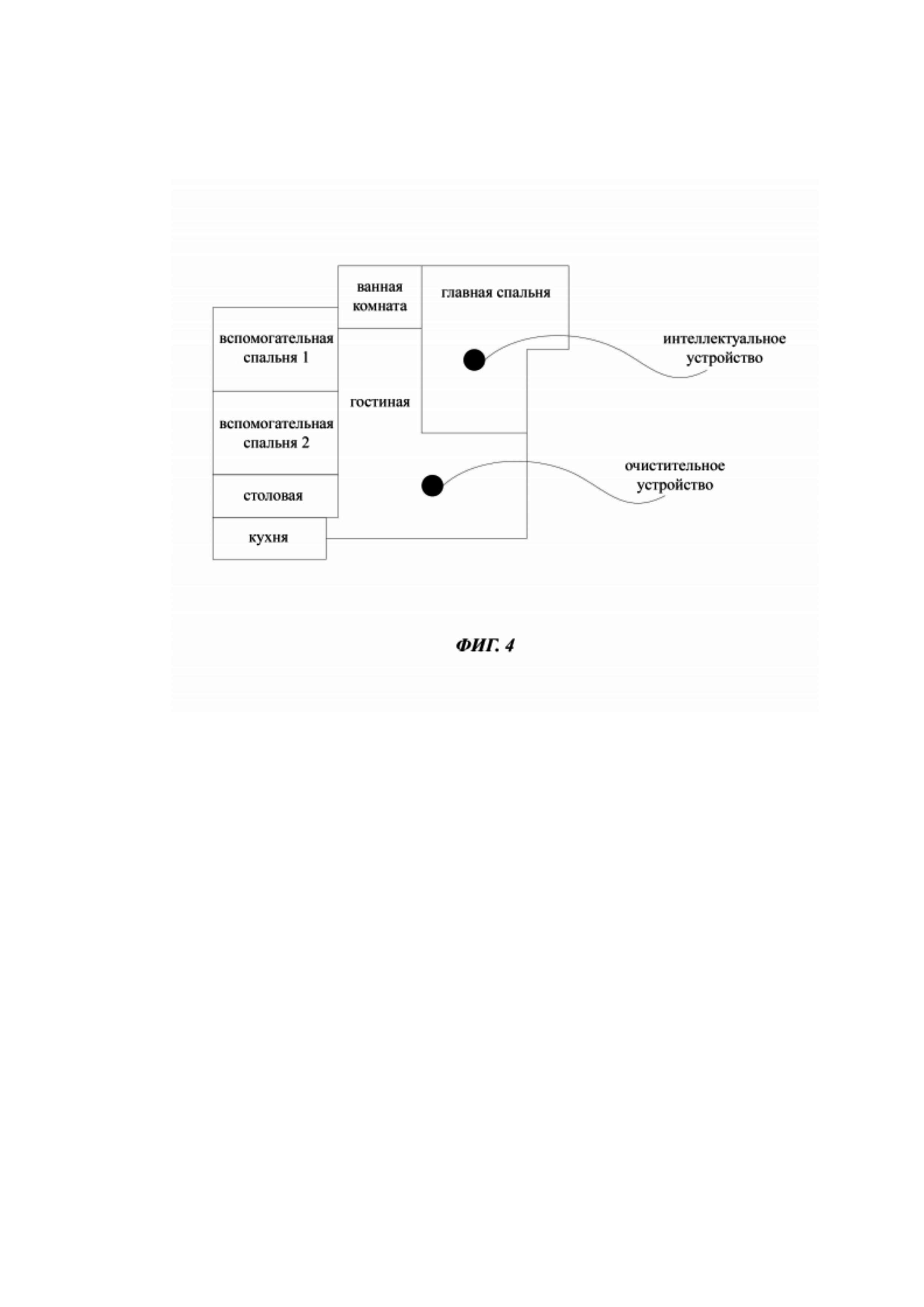
Как показано на фиг. 4, например, для дома, географические зоны, разделенные внутри дома, могут включать в себя гостиную, главную спальню, вспомогательную спальню 1, вспомогательную спальню 2, столовую, ванную комнату, кухню и т.д. Если пользователь в текущий момент находится в главной спальне, очистительное устройство автоматически обходит эту географическую зону, и предпочтительно выполняет задачу очистки в зоне, отличной от первой географической зоны. Когда пользователь покидает главную спальню, очистительное устройство входит в главную спальню для выполнения задачи очистки.
В другом варианте настоящего изобретения, для быстрой оценки географической зоны, в которой в текущий момент находится пользователь, после получения в режиме реального времени информации о текущем географическом местоположении пользователя, способ согласно данному варианту настоящего изобретения содержит следующие этапы. Получают плоскую карту зон для сценария, в котором в текущий момент находится очистительное устройство, причем плоские зоны показаны на фиг. 4 в соответствии с плоской картой зон. Далее, определяют пределы перемещений в пространстве для одной или более географических зон, входящих в сценарий, в котором в текущий момент находится очистительное устройство, при этом сохраняют соответствующие соотношения между географическими зонами и пределами перемещений в пространстве.
В таком случае, если очистительное устройство может определить первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, в соответствии с первым географическим местоположением, может быть принят и реализован следующий подход. Осуществляют просмотр соответствующих соотношений согласно первому географическому местоположению. Если первое географическое местоположение находится в пределе перемещений в пространстве, заданном одной из географических зон, такую географическую зону определяют в качестве первой географической зоны.
При втором условии / во втором режиме очистки, очистительное устройство осуществляет очистку следящего типа, во время которой расстояние между очистительным устройством и интеллектуальным устройством не меньше предварительно заданного порогового значения.
Величина предварительно заданного порогового значения может составлять 1 метр, 2 метра и т.д., причем данная величина не ограничивается в данном варианте настоящего изобретения. Величина предварительно заданного порогового значения может быть задана пользователем в автономном режиме. Расстояние, не меньшее предварительно заданного порогового значения, может быть названо безопасным расстоянием, и задано таким образом, чтобы избежать столкновения между пользователем и очистительным устройством.
Для такого условия, поскольку заданный режим очистки, предварительно заданный пользователем, относится к очистке следящего типа, очистительное устройство оценивает, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения, после приема в режиме реального времени информации о местоположении, отправленной интеллектуальным устройством. Если расстояние между первым географическим местоположением и вторым географическим местоположением не меньше предварительно заданного порогового значения, очистительное устройство может осуществить операцию очистки согласно траектории движения интеллектуального устройства. Действие по осуществлению операции очистки согласно траектории движения интеллектуального устройства может быть реализовано так, что траектория движения пользователя записывается интеллектуальным устройством, после чего интеллектуальное устройство отправляет траекторию движения в очистительное устройство, и далее очистительное устройство может очистить зону, в которой пользователь ходит или остается согласно траектории движения после получения траектории движения. Другими словами, очищаются только те места, в которых пользователь уже был.
Важно отметить, что очистка следящего типа, во время которой расстояние не меньше предварительно заданного порогового значения, включает в себя два следующих подхода. Согласно первому подходу, очистительное устройство все время удерживается на минимальном расстоянии от пользователя, например, расстояние между ними всегда равняется 2 метрам. Согласно второму подходу, расстояние между очистительным устройством и пользователем больше предварительно заданного порогового значения, при этом согласно данному подходу особо не подчеркивается, что расстояние между ними всегда является фиксированным, требуется только, чтобы расстояние между ними сохранялось больше предварительно заданного порогового значения, например, требуется просто, чтобы расстояние между ними было больше двух метров.
В другом варианте настоящего изобретения, если расстояние между первым географическим местоположением и вторым географическим местоположением меньше предварительно заданного порогового значения, для предотвращения столкновения между очистительным устройством и пользователем, текущее расстояние между очистительным устройством и интеллектуальным устройством может быть получено в режиме реального времени во время операции очистки, осуществляемой очистительным устройством, согласно траектории движения интеллектуального устройства. Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, очистительное устройство управляет главным блоком так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и далее очистительное устройство может продолжить осуществлять действие по очистке согласно полученной траектории движения.
Если очистительным устройством управляют так, чтобы оно удалялось от интеллектуального устройства, то применяют следующий подход. Управляют очистительным устройством для регулирования его направления, например, для регулирования его движения в противоположном направлении по отношению к текущему направлению движения вперед, после чего очистительным устройством управляют для перемещения его вперед для перехода в некоторое место на расстоянии, не меньшем предварительно заданного порогового значения, от географического местоположения, в котором в текущий момент расположено интеллектуальное устройство, и далее очистительное устройство может продолжить осуществлять операцию очистки из этого места.
Важно отметить, что, когда очистительное устройство осуществляет операцию очистки для такого условия, очистку можно осуществить согласно траектории движения интеллектуального устройства, при этом также может быть очищена вся географическая зона, в которой в текущий момент находится пользователь. То есть, данный вариант настоящего изобретения дополнительно содержит следующие действия. Если заданный режим очистки, заданный пользователем, представляет собой второй режим очистки, то когда расстояние между первым географическим местоположением и вторым географическим положением не меньше предварительно заданного порогового значения, первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, можно дополнительно определить в соответствии с первым географическим местоположением. Операцию очистки далее осуществляют в первой географической зоне с обеспечением того, что расстояние между очистительным устройством и пользователем не будет меньше предварительно заданного порогового значения.
Например, если пользователь в текущий момент находится в гостиной, зоны, отличные от зоны, в которой ходит или остается пользователь, также очищаются исходя из допущения, что расстояние с пользователем не меньше 2 метров, что не ограничивается в данном варианте настоящего изобретения.
В другом варианте настоящего изобретения, во время операции очистки, осуществляемой очистительным устройством в первой географической зоне, текущее расстояние между очистительным устройством и интеллектуальным устройством может быть далее получено в режиме реального времени. Если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, то для предотвращения столкновения между очистительным устройством и пользователем, очистительным устройством также можно управлять для его постепенного удаления от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется равным по меньшей мере предварительно заданному пороговому значению, после чего очистительным устройством управляют для продолжения осуществления им операции очистки в первой географической зоне из указанного местоположения.
В другом варианте настоящего изобретения для обеспечения интенсивности очистки, дополнительно предварительно задают соответствующее соотношение между продолжительностью пребывания и степенью интенсивности, и, тем самым, обеспечивают, что при осуществлении операции очистки повышается интенсивность очистки очистительного устройства и увеличивается продолжительность пребывания пользователя, причем очистительное устройство может локально сохранять соответствующее соотношение между степенью интенсивности очистки и продолжительностью пребывания, как показано в нижеследующей таблице.
Таблица №1
|
По сравнению с легкой очисткой, глубокая очистка имеет более высокую частоту вращения чистящей щетки, более длительное время очистки и большее количество раз реверсивной очистки. Очевидно, что степени интенсивности очистки также могут иметь более углубленную классификацию, которая не ограничивается в данном варианте настоящего изобретения.
В данном варианте настоящего изобретения, если операция очистки осуществляется в соответствии с первым географическим местоположением и заданным режимом очистки, может быть принят и реализован следующий подход. В соответствии с первым географическим местоположением определяют первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство. Определяют заданную продолжительность пребывания пользователя в первой географической зоне. Согласно предварительно заданным соответствующим соотношениям между продолжительностями пребывания и степенями интенсивности очистки, получают заданную степень интенсивности очистки, соответствующую заданной продолжительности пребывания. Осуществляют операцию очистки согласно заданной степени интенсивности очистки и заданному режиму очистки.
Другими словами, независимо от конкретного упомянутого выше режима очистки, применяемого для осуществления операции очистки посредством очистительного устройства, очистительное устройство может выполнить очистку согласно упомянутому выше подходу к очистке. Например, если очистку осуществляют согласно первому режиму очистки, когда продолжительность пребывания пользователя в главной спальне составляет 2 часа, очистительное устройство может осуществить глубокую очистку полностью во всей главной спальне. Или может быть дополнительно получена траектория движения пользователя, пребывающего в главной спальне, и глубокую очистку осуществляют согласно указанной траектории движения. В данном варианте настоящего изобретения отсутствуют какие-либо особые ограничения.
Согласно способу, предложенному в данном варианте настоящего изобретения, перед осуществлением очистительным устройством операции очистки, сначала можно оценить, находятся ли очистительное устройство и интеллектуальное устройство, расположенное на части конечности пользователя, в одном и том же сценарии. Если очистительное устройство и интеллектуальное устройство в текущий момент находятся в одном и том же сценарии, очистительное устройство может получить первое географическое местоположение интеллектуального устройства, и осуществить операцию очистки согласно указанному первому географическому местоположению и заданному режиму очистки. При этом техники выполнения очистки расширяются, в результате чего такие техники очистки становятся более разноплановыми. Кроме того, местоположение пользователя определяется на основании интеллектуального устройства, благодаря чему повышается значимость очистки, и, следовательно, такой способ осуществления операции очистки становится более интеллектуальным.
На фиг. 5 представлена схема аппарата для осуществления операции очистки посредством очистительного устройства согласно одному из примерных вариантов настоящего изобретения. Как показано на фиг. 5, аппарат содержит модуль 501 оценки, первый модуль 502 получения и модуль 503 осуществления.
Модуль 501 оценки выполнен с возможностью оценки того, находятся ли очистительное устройство и интеллектуальное устройство в одном и том же сценарии, при этом интеллектуальное устройство расположено на части конечности пользователя.
Первый модуль 502 получения выполнен так, чтобы, когда очистительное устройство и интеллектуальное устройство находятся в одном и том же сценарии, получать первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство.
Модуль 503 осуществления выполнен с возможностью осуществления операции очистки в соответствии с первым географическим местоположением и заданным режимом очистки.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен так, чтобы, когда заданный режим очистки представляет собой первый режим очистки, определять первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, в соответствии с первым географическим местоположением, и управлять очистительным устройством для осуществления им операции очистки в зоне, отличной от первой географической зоны.
Первый режим очистки относится к очистке обходного типа, во время которой очистительное устройство осуществляет операцию очистки в зоне, отличной от первой географической зоны.
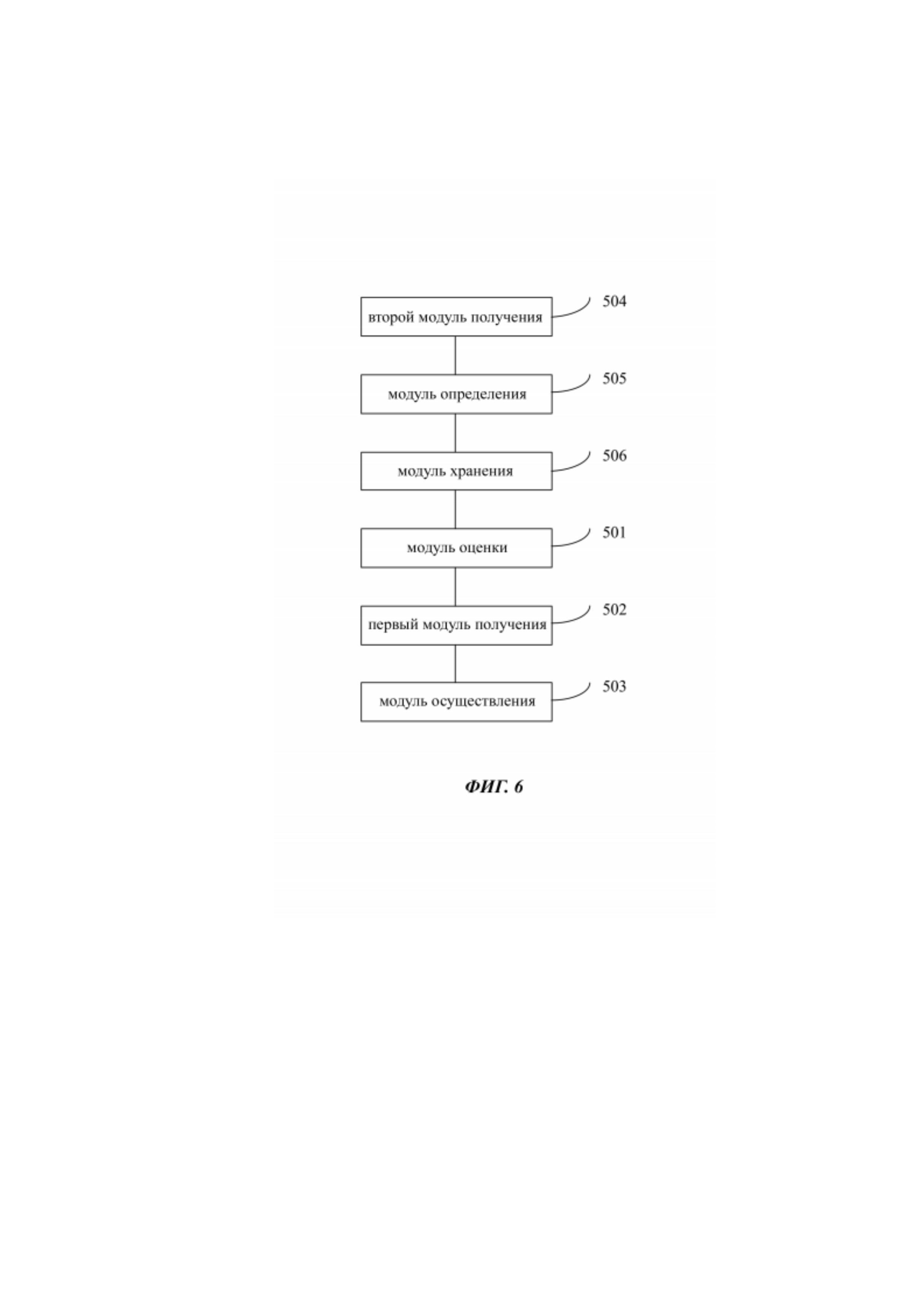
В другом варианте настоящего изобретения, как показано на фиг. 6, аппарат дополнительно содержит второй модуль 504 получения, модуль 505 определения и модуль 506 хранения.
Второй модуль 504 получения выполнен с возможностью получения плоской карты зон для сценария, в котором в текущий момент находится очистительное устройство.
Модуль 505 определения выполнен с возможностью определения пределов перемещений в пространстве для одной или более географических зон, входящих в сценарий, в котором в текущий момент находится очистительное устройство, в соответствии с плоской картой зон.
Модуль 506 хранения выполнен с возможностью сохранения соответствующих соотношений между географическими зонами и пределами перемещений в пространстве.
Модуль 505 определения дополнительно выполнен с возможностью просмотра соответствующих соотношений согласно первому географическому местоположению и, если первое местоположение находится в пределе перемещений в пространстве, заданном одной из географических зон, определения указанной географической зоны в качестве первой географической зоны.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен так, чтобы, когда заданный режим очистки представляет собой второй режим очистки, оценивать то, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения, и если расстояние между первым географическим местоположением и вторым местоположением не меньше предварительно заданного порогового значения, осуществлять операцию очистки в соответствии с траекторией движения интеллектуального устройства.
Второй режим очистки относится к очистке следящему типу, во время которой расстояние между очистительным устройством и интеллектуальным устройством не меньше предварительно заданного порогового значения.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен с возможностью получения траектории движения интеллектуального устройства, получения текущего расстояния между очистительным устройством и интеллектуальным устройством в режиме реального времени во время операции очистки, осуществляемой в соответствии с указанной траекторией движения, и если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управления очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжило осуществлять операцию очистки с соответствии с указанной траекторией движения.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен так, чтобы, если заданный режим очистки представляет собой второй режим очистки, оценивать то, не меньше ли расстояние между первым географическим местоположением и вторым географическим местоположением, в котором в текущий момент расположено очистительное устройство, предварительно заданного порогового значения, и, если расстояние между первым географическим местоположением и вторым местоположением не меньше предварительно заданного порогового значения, определять первую географическую зону, в которой в текущий момент расположено интеллектуальное устройство, в соответствии с первым географическим местоположением, и осуществлять операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен с возможностью получения текущего расстояния между очистительным устройством и интеллектуальным устройством в режиме реального времени во время очистки в первой географической зоне, и, если текущее расстояние между очистительным устройством и интеллектуальным устройством меньше предварительно заданного порогового значения, управления очистительным устройством так, чтобы оно постепенно удалялось от интеллектуального устройства до тех пор, пока текущее расстояние между очистительным устройством и интеллектуальным устройством не окажется по меньшей мере равным предварительно заданному пороговому значению, и продолжало осуществлять операцию очистки в первой географической зоне.
В другом варианте настоящего изобретения модуль 503 осуществления выполнен с возможностью определения первой географической зоны, в которой в текущий момент расположено интеллектуальное устройство, в соответствии с первым географическим местоположением, определения заданной продолжительности пребывания пользователя в первой географической зоне, получения, согласно предварительно заданным соответствующим соотношениям между продолжительностями пребывания и степенями интенсивности очистки, заданной степени интенсивности очистки, соответствующей заданной продолжительности пребывания, и осуществления операции очистки согласно заданной степени интенсивности очистки и заданному режиму очистки.
Перед осуществлением операции очистки, устройство, предложенное в данном варианте настоящего изобретения, сначала может оценить, находятся ли очистительное устройство и интеллектуальное устройство, расположенное на части конечности пользователя, в одном и том же сценарии. Если очистительное устройство и интеллектуальное устройство в текущий момент находятся в одном и том же сценарии, очистительное устройство может получить первое географическое местоположение интеллектуального устройства и осуществить операцию очистки согласно указанному первому географическому местоположению и заданному режиму очистки. При этом техники выполнения очистки расширяются, в результате чего такие техники очистки становятся более разноплановыми. Кроме того, местоположение пользователя определяется на основании интеллектуального устройства, благодаря чему повышается значимость очистки, и, следовательно, такой способ осуществления операции очистки становится более интеллектуальным.
Что касается устройств в приведенных выше вариантах настоящего изобретения, то конкретные техники осуществления операций для отдельных модулей, предусмотренных в них, были подробно раскрыты в вариантах настоящего изобретения, относящихся к способам, поэтому они не будут здесь подробно рассмотрены.
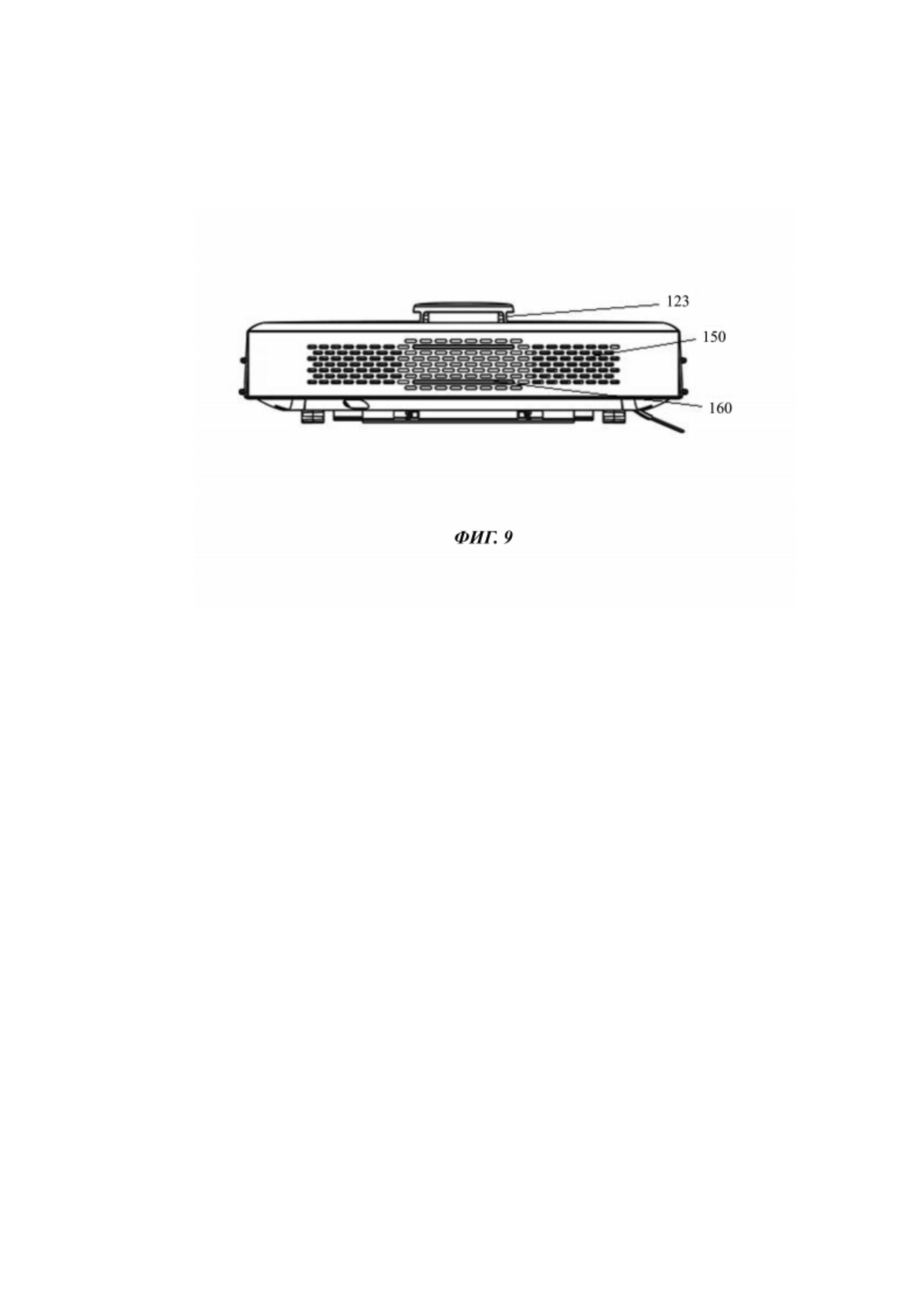
На фиг. 7 – 10 показаны структурные схемы очистительного устройства согласно одному из примерных вариантов настоящего изобретения. Как показано на фиг. 7 – 10, очистительное устройство 100 может содержать главный корпус 110 машины, сенсорную систему 120, систему 130 управления, приводную систему 140, очистительную систему 150, систему 160 питания и систему 170 для человеко-компьютерного взаимодействия. Главный корпус 110 машины содержит переднюю часть 111 и заднюю часть 112, имеет приблизительно круглую форму (и передняя часть, и задняя часть являются круглыми) и может также иметь другую форму, в том числе, приблизительно D-образную форму с квадратной передней частью и круглой задней частью.
Сенсорная система 120 содержит устройство 121 определения местоположения, расположенное над главным корпусом 110 машины, буфер 122, расположенный в передней части 111 главного корпуса 110 машины, датчик 123 наличия ступенек и сенсорное устройство, такое как ультразвуковой датчик (не показан на чертежах), инфракрасный датчик (не показан на чертежах), магнитометр (не показан на чертежах), акселерометр (не показан на чертежах), гироскоп (не показан на чертежах), и одометр (не показан на чертежах), и предоставляет различные виды информации о местоположении и информации о состоянии движения машины в систему 130 управления. Устройство 121 определения местоположения содержит, помимо прочего, съемочную камеру и лазерный датчик расстояния LDS (от англ. Laser Distance Sensor).
Передняя часть 111 главного корпуса 110 машины может служить опорой для буфера 122, и когда приводной колесный модуль 141 приводит в действие робот для его перемещения по земной поверхности в процессе очистки, буфер 122 обнаруживает одно или более событий (или объектов) на пути движения очистительного устройства 100 посредством сенсорной системы, например, инфракрасного датчика, причем робот может управлять приводным колесным модулем 141 для обеспечения возможности реагирования роботом на указанные события (или объекты), например, для удаления в сторону от препятствий, посредством указанных событий (или объектов), например, препятствий и стен, обнаруженных буфером 122.
Система 130 управления скомпонована на основной плате в главном корпусе 110 машины, и содержит энергонезависимую память, например, жесткий диск, флеш-память и оперативное запоминающее устройство, и вычислительный процессор для связи, например, центральный процессор и прикладной процессор, причем прикладной процессор рисует актуальную карту окружающей среды, в которой расположен робот, посредством алгоритма определения местоположений, например, системы одновременной локализации и картирования SLAM (от англ. Simultaneous Location and Mapping), согласно информации о препятствии, поданной обратно посредством датчика LDS. Кроме того, текущее рабочее состояние очистителя, например: преодоление порога, заезд на ковер, расположение на ступеньке, зажатие верхней части и нижней части, контейнер для пыли полный, а очиститель убран, оценивается исчерпывающим образом совместно с информацией о расстоянии и информацией о скорости, поданной обратно буфером 122, датчиком 123 наличия ступенек и сенсорным устройством, например, ультразвуковым датчиком, инфракрасным датчиком, магнитометром, акселератором, гироскопом и одометром, причем следующая конкретная стратегия действия может также быть разработана для различных условий. Таким образом, работа робота более соответствует требованию владельца, благодаря чему удается улучшить пользовательский опыт. Кроме того, система 130 управления может спланировать более эффективную и приемлемую траекторию очистки и подход к очистке на основании информации об актуальной карте, нарисованной посредством системы SLAM, так что эффективность очистки значительно повышается.
Приводная система 140 может управлять очистительным устройством 100 так, чтобы оно продвигалось по земной поверхности на основании приводной команды с информацией о расстоянии и угле, например, составляющих x, y и θ. Приводная система 140 содержит приводной колесный модуль 141, а приводной колесный модуль 141 может одновременно управлять левым колесом и правым колесом. Для более точного управления движением машины, приводной колесный модуль 141 предпочтительно содержит левый приводной колесный модуль и правый приводной колесный модуль, соответственно. Левый и правый приводные колесные модули расположены напротив друг друга вдоль боковой оси, заданной главным корпусом 110. Для обеспечения более устойчивого движения робота по земной поверхности или наделения его более высокой подвижностью, робот содержит одно или более ведомых колес 142, причем ведомые колеса содержат, помимо прочего, универсальные колеса. Приводной колесный модуль содержит ходовое колесо, приводной двигатель и контур управления, управляющий приводным двигателем, причем приводной колесный модуль может дополнительно быть соединен с контуром, измеряющим ток возбуждения, и одометр. Приводной колесный модуль 141 может быть съемным образом соединен с главным корпусом 110 для удобной сборки, разборки и технического обслуживания. Каждое приводное колесо может иметь систему ассиметричной подвески падающего типа, может быть подвижно закреплено, например, прикреплено к главному корпусу 110 робота с возможностью вращения, и принимает пружинный возврат из крайнего положения вниз и в сторону от главного корпуса 110 робота. Пружинные возвраты из крайних положений обеспечивают возможность для приводных колес сохранять контакт и трение с землей с конкретным усилием захватывания, при этом очистительный компонент очистительного устройства 100 может также контактировать с земной поверхностью10 с конкретным давлением.
Очистительная система 150 может представлять собой по меньшей мере одну из следующих систем: систему сухой очистки или систему влажной очистки. Главная очистительная функция системы сухой очистки отличается от очистительной системы 151, состоящей из конструкции с вращающейся щеткой, конструкции с пылевым бункером, конструкции с вентилятором, с воздуховыпускным отверстием и соединительных частей между ними. Конструкция с вращающейся щеткой при конкретном взаимодействии с земной поверхностью подметает и закручивает пыль на земной поверхности в переднюю часть всасывающего отверстия между конструкцией с вращающейся щеткой и конструкцией с пылевым бункером, и далее пыль всасывается в конструкцию с пылевым бункером за счет всасываемого воздуха, создаваемого конструкцией с вентилятором и проходящего через конструкцию с пылевым бункером. Способность к пылеулавливанию очистителя может быть выражена в виде эффективности сбора пыли DPU (от англ. Dust Pick up Efficiency), причем показатель DPU зависит от конструкции с вращающейся щеткой и материала, а также от коэффициента использования силы ветра воздушного потока, формирующегося посредством всасывающего отверстия, конструкции с пылевым бункером, конструкции с вентилятором, воздуховыпускного отверстия и соединительных частей между ними, а также от типа и мощности вентилятора, и является сложной конструкторской проблемой системы. По сравнению с обычным закупоренным пылесборником, повышение способности к пылеулавливанию является наиболее важным эффектом для робота-очистителя с ограниченными ресурсами энергии. Это связано с тем, что повышение способности к пылеулавливанию напрямую и эффективно снижает потребность в энергетических ресурсах, то есть, машина, изначально способная очистить площадь в 80 квадратных метров после зарядки, может быть доработана для очистки 180 квадратных метров и даже больше после зарядки. Кроме того, срок эксплуатации аккумуляторной батареи, частота зарядки которой снижена, также может быть существенно продлен, при этом частота замены аккумуляторной батареи пользователем также уменьшается. Интуитивно и важно, что повышение способности к пылеулавливанию является для пользователя наиболее очевидным и важным опытом, при этом пользователь может сразу сделать вывод о полной или неполной очистке / полном или неполном вытирании. Система сухой очистки может дополнительно содержать боковую щетку с вращающимся валом, причем вращающийся вал образует конкретный угол с земной поверхностью для перемещения мусора в зону вращающейся щетки очистительной системы 150.
Система 160 питания содержит перезаряжаемую аккумуляторную батарею, например, никель-металл-гибридную батарею и литиевую батарею. Перезаряжаемая аккумуляторная батарея может быть соединена с контуром управления зарядкой, контуром обнаружения температуры зарядки батарейного блока и контуром отслеживания пониженного напряжения батареи, при этом контур управления зарядкой, контур обнаружения температуры зарядки батарейного блока и контур отслеживания пониженного напряжения батареи соединены с контуром управления однокристального микрокомпьютера. Главный блок соединен со стойкой зарядки для зарядки посредством зарядного электрода, предусмотренного на боковой части или ниже корпуса машины. Если пыль садится на открытый зарядный электрод, пластмассовый корпус машины вокруг электрода может расплавиться и деформироваться из-за накопительного эффекта зарядов в процессе зарядки, при этом даже может произойти деформация самого электрода и нормальная зарядка не может быть продолжена.
Система 170 человеко-машинного взаимодействия содержит кнопки на центральной панели, причем кнопки предусмотрены для выбора функций пользователем, причем также может быть предусмотрено по меньшей мере одно из следующих средств: дисплейный экран, индикаторная лампочка или громкоговоритель, причем дисплейный экран, индикаторная лампочка и громкоговоритель отображают текущее состояние или функциональные опции машины пользователю, при этом дополнительно может быть предусмотрена клиентская программа мобильного телефона. Очистительное устройство, относящееся к типу с навигацией пути, может отображать карту окружающей среды, в которой расположено оборудование, и местоположение машины пользователю, а также может обеспечить более широкие и гуманизированные функциональные опции для пользователя.
Для более ясного раскрытия поведения робота заданы следующие направления его движения: очистительное устройство 100 может двигаться по земной поверхности за счет различных комбинаций движений вдоль соответствующих трех взаимно перпендикулярных осей, заданных главным корпусом 110: боковой оси x, переднезадней оси y и центральной вертикальной оcи z. Направление движения вперед вдоль переднезадней оси y обозначено как «направление вперед», а направление движения назад вдоль переднезадней оси y обозначено как «направление назад». Боковая ось x по сути проходит между правым колесом и левым колесом робота вдоль средней оси, заданной центральной точкой приводного колесного модуля 141, причем очистительное устройство 100 может вращаться вокруг оси x. Условие, при котором передняя часть очистительного устройства 100 наклонена вверх, а его задняя часть наклонена вниз, определяется как «кабрирование», а условие, при котором передняя часть очистительного устройства 100 наклонена вниз, а его задняя часть наклонена вверх, определяется как «пикирование». Кроме того, очистительное устройство 100 может вращаться вокруг оси z. В направлении вперед робота, условие, при котором очистительное устройство 100 наклонено к правой стороне оси y, определяется как «вращение вправо», а условие, при котором очистительное устройство 100 наклонено к левой стороне оси y, задается как «вращение влево».
В одном из примерных вариантов настоящего изобретения, дополнительно предложен энергонезависимый машиночитаемый носитель данных, содержащий некоторую инструкцию. Например, указанный энергонезависимый машиночитаемый носитель данных может представлять собой постоянное запоминающее устройство (ПЗУ), постоянное запоминающее устройство на компакт-диске (CD-ROM, от англ. Compact Disc Read-Only Memory), устройство магнитного типа, дискету, оптическое запоминающее оборудование или другое подобное устройство.
Согласно энергонезависимому машиночитаемому носителю данных, при исполнении процессором очистительного устройства инструкции, хранящейся в носителе данных, очистительное устройство может реализовать описанный выше способ осуществления операции очистки, причем процессор представляет собой вычислительный процессор в системе 130 управления.
Другие варианты настоящего изобретения станут очевидными специалистам в данной области техники при изучении настоящего описания и при реализации на практике настоящего изобретения. Предполагается, что данная заявка охватывает любые вариации, варианты применения или модификации настоящего изобретения в соответствии с его основными принципами и включает в себя такие отступления от вариантов настоящего изобретения, которые относятся к общеизвестной или общепринятой практике в данной области техники. Предполагается, что описание и приведенные примеры следует рассматривать исключительно в качестве иллюстративных, при этом истинный объем и сущность настоящего изобретения заданы приведенной ниже формулой изобретения.
Следует понимать, что варианты настоящего изобретения не ограничиваются конкретной конструкцией, которая была раскрыта выше и проиллюстрирована на прилагаемых чертежах, и что в настоящее изобретение могут быть внесены различные модификации и изменения, не выходящие за пределы его объема. Предполагается, что объем вариантов осуществления настоящего изобретения ограничен только прилагаемой формулой изобретения.
Промышленная применимость
Согласно различным вариантам настоящего изобретения, перед осуществлением очистительным устройством операции очистки, сначала можно оценить, находятся ли очистительное устройство и интеллектуальное устройство, расположенное на части конечности пользователя, в одном и том же сценарии. Если очистительное устройство и интеллектуальное устройство в текущий момент находятся в одном и том же сценарии, очистительное устройство может получить первое географическое местоположение, в котором в текущий момент расположено интеллектуальное устройство, и осуществить операцию очистки согласно указанному первому географическому местоположению и заданному режиму очистки. При этом техники выполнения очистки расширяются, в результате чего такие техники очистки становятся более разноплановыми. Кроме того, местоположение пользователя определяется на основании интеллектуального устройства, благодаря чему повышается применимость очистки, и, следовательно, такой способ осуществления операции очистки становится более интеллектуальным.
Способ и терминал для беспроводной зарядки
Способ и устройство для передачи данных, оборудование пользователя и базовая станция
Способ и устройство для предотвращения реакции терминала на непреднамеренное прикосновение
Способ и устройство для управления прибором для стрижки волос и прибор для стрижки волос
Покупательская тележка, способ оповещения и оповещающее устройство для покупательской тележки
Экран дисплея на органических светоизлучающих диодах и электронное устройство
Камера в сборе и мобильный терминал
Модуль отображения, устройство отображения, способ управления для устройства отображения и носитель данных
Способ и устройство для управления блоком электророзеток
Способ и устройство для передачи синхронизированной широковещательной информации
Способ и устройство для управления самоуравновешивающимся транспортным средством
Способ и устройство управления самоуравновешивающимся транспортным средством
Способ и устройство для безопасного вождения
Способ и устройство для уведомления об аномальной видеоинформации
Способ и устройство для администрирования видеоданных, а также терминал и сервер
Способ и устройство для управления роботами для уборки пола
Способ управления электропитанием, устройство для разветвителя питания и разветвитель питания
Способ, устройство и аппарат для управления стеклоочистителем и транспортное средство
Способ и устройство для управления интеллектуальным фонариком и интеллектуальное устройство
Способ и устройство для управления будильником

