Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ
Вид РИД
Изобретение
Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при эксплуатации солнечных батарей (СБ) СЭС КА.
Одной из составляющей контроля производительности СБ КА является контроль основных электрических характеристик СБ - выходного тока, напряжения и мощности СБ. На стадии проектирования и изготовления СБ осуществляется теоретический расчет выходных параметров СБ, который может быть основан на методе перемещений вольт-амперной характеристики, учитывающем различные влияния окружающей среды и параметров нагрузки на характеристики СБ (Система электроснабжения КА. Техническое описание. 300ГК.20Ю.0000-АТО. РКК «Энергия», 1998; Раушенбах Г. Справочник по проектированию солнечных батарей. Москва. Энергоатомиздат. 1983, с. 49, 54).
Недостаток указанного способа контроля производительности СБ заключается в том, что используемые в расчетах модели факторов космического полета имеют ограниченную точность, что не позволяет получить достоверные данные о реальных характеристиках СБ в полете, учитывающих процесс «деградации» СБ.
Для контроля фактических характеристик СБ в полете используются измерения фактического выходного тока СБ, генерируемого фотоэлектрическими преобразователями (ФЭП) под воздействием солнечного излучения, при этом панели СБ выставлены таким образом, чтобы световой поток поступал перпендикулярно рабочей поверхности СБ (Елисеев А.С. Техника космических полетов. Москва, «Машиностроение», 1983, с. 190-194; Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983, с. 57; патент РФ №2353555 по заявке №2006131395/11, приоритет от 31.08.2006 - прототип), для чего разворачивают панели СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с направлением на Солнце и контроль текущей производительности панели СБ осуществляют по результатам сравнения измеренных значений тока с задаваемыми значениями - текущая эффективность СБ оценивается по отношению измеренных фактических выходных параметров СБ к их номинальным значениям - проектным или некоторым исходным значениям, например, измеренных на предыдущих этапах полета.
Выбор силы тока в качестве контролируемой выходной характеристики СБ вызван тем, что его сила является переменной величиной, напрямую зависит от состояния СБ в целом, а напряжение на СБ является достаточно стабильной величиной и определяется в основном физическими свойствами используемых для изготовления СБ фотоэлектрических преобразователей, при этом режим работы ФЭП еще на стадии проектирования СБ задается таким образом, чтобы генерируемая мощность (как произведение силы тока и напряжения) была максимально возможной.
Данный способ обеспечивает контроль суммарной эффективности панели СБ в ходе полета КА. Меньшие значения фактических выходных токов от СБ по отношению к заданным проектным или исходным значениям означают «деградацию» СБ.
Недостаток способа-прототипа связан с тем, что он не предусматривает проведение замера тока от СБ при одинаковых внешних полетных условиях, что необходимо для обоснованности дальнейшего сравнения результатов выполненных замеров.
Задачей, на решение которой направлено настоящее изобретение, является повышение точности оценки текущей производительности СБ в ходе полета КА с инерционными исполнительными органами.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении одинаковых условий замера тока от СБ при выполнении сеансов оценки эффективности (производительности) СБ по результатам прямого замера электрического тока, генерируемого СБ на фоне штатного полета КА с инерционными исполнительными органами в ориентации, при которой суммарный внешний возмущающий момент - момент от воздействия на КА атмосферы и силы тяжести - за виток достигает минимального значения и обеспечивается минимальное накопление кинетического момента гиросистемы.
Технический результат достигается тем, что в способе контроля производительности солнечной батареи космического аппарата с инерционными исполнительными органами, включающем ориентацию нормали к рабочей поверхности солнечной батареи на Солнце, измерение значений тока от солнечной батареи и контроль текущей производительности солнечной батареи по результатам сравнения текущих измеренных значений тока и значений тока, измеренных на предыдущих этапах полета, дополнительно измеряют вектор направления на Солнце в инерциальной системе координат, измеряют значения угла γS между направлением на Солнце и нормалью к плоскости орбиты космического аппарата на моменты времени 
где tS - момент прохождения подсолнечной точки витка;
ωорб - орбитальная угловая скорость космического аппарата;
ϕ - угол между радиус-вектором космического аппарата и проекцией на плоскость орбиты нормали к рабочей поверхности солнечной батареи в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности солнечной батареи элементами конструкции космического аппарата, в поддерживаемой ориентации космического аппарата при положительном отсчете угла в сторону полета, определяют текущую величину изменения угла между направлением на Солнце и нормалью к плоскости орбиты за виток Δγ, выполняют построение и поддержание в орбитальной системе координат ориентации космического аппарата, при которой воздействующий на космический аппарат внешний возмущающий момент за виток достигает минимального значения, последовательно разворачивают солнечную батарею в дискретные положения, в которых значение угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце составляет величину менее фиксированного значения, измеряют ток от солнечной батареи на световом участке витка орбиты, на котором выполнено условие
где λ - угол между нормалью к плоскости орбиты и нормалью к рабочей поверхности солнечной батареи в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности солнечной батареи элементами конструкции космического аппарата, в поддерживаемой ориентации космического аппарата, и повторяют измерения тока на следующем световом участке, при этом измеряют моменты времени переориентации солнечной батареи, по которым определяют текущие значения угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце, определяют текущее значение расстояние от Земли до Солнца, в ходе полета повторяют вышеописанные действия и контроль производительности солнечной батареи выполняют по результатам сравнения полученных для упомянутых пар последовательных световых участков витков орбиты осредненных значений тока от солнечной батареи, умноженных на квадрат определенного на моменты соответствующих измерений тока текущего значения расстояния от Земли до Солнца и отнесенных к квадрату среднего расстояния от Земли до Солнца и определенным на моменты соответствующих измерений тока текущим значениям косинуса угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце, при этом измерения осредняемых значений тока проводятся в моменты времени, определяемые соотношением
где  - момент прохождения подсолнечной точки i-го, i=1, 2 светового участка k-й пары упомянутых последовательных световых участков;
- момент прохождения подсолнечной точки i-го, i=1, 2 светового участка k-й пары упомянутых последовательных световых участков;
Aj - постоянная, задаваемая для j-й точки светового участка, в которой измеряется ток от солнечной батареи.
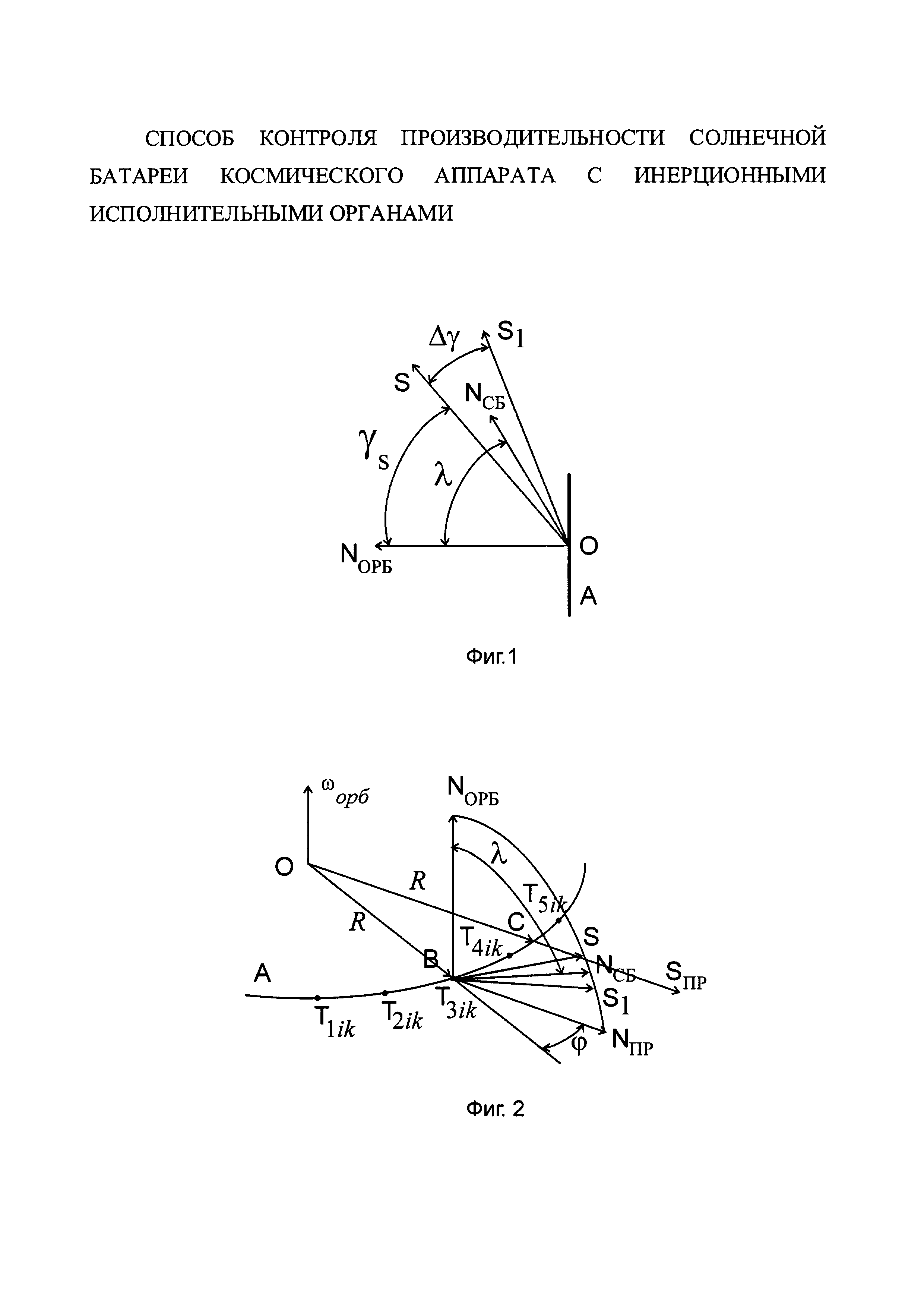
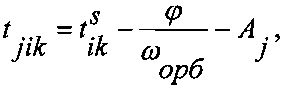
Суть предлагаемого изобретения поясняется на фиг. 1 и 2, на которых соответственно представлен пример схемы расположения направления на Солнце относительно плоскости орбиты на двух витках измерения тока от СБ и пример схемы расположения точек орбиты, в которых измеряется ток от СБ, относительно подсолнечной точки витка.
На фиг. 1 и 2 введены обозначения:
А - орбита КА;
О - центр Земли;
NОРБ - вектор нормали к плоскости орбиты КА;
S, S1 - вектора направления на Солнце на моменты прохождения подсолнечной точки первого и следующего витков измерения тока от СБ, соответственно, взятые за вычетом величины времени 
γS = угол между направлением на Солнце и нормалью к плоскости орбиты КА на момент прохождения подсолнечной точки витка, взятый за вычетом величины времени 
Δγ - величина изменения угла между направлением на Солнце и нормалью к плоскости орбиты КА за виток;
NСБ - вектор нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА;
λ - угол между нормалью к плоскости орбиты и нормалью к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА;
R - радиус-вектор КА;
ωорб - орбитальная угловая скорость КА;
NПР - проекция на плоскость орбиты нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА;
ϕ - угол между радиус-вектором КА и проекцией на плоскость орбиты нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА при положительном отсчете угла в сторону полета,
SПР - проекция вектора направления на Солнце на плоскость орбиты;
С - подсолнечная точка витка орбиты;
В = тока витка, момент прохождения которой отстоит от момента прохождения подсолнечной точки витка на время  взятое с учетом знака угла ϕ;
взятое с учетом знака угла ϕ;
Tjik, j=1, …, 5 - точки витка, в которых измеряется ток от СБ.
Для наглядности на фиг. 1 и 2 представлен случай, когда вектор нормали к плоскости орбиты КА и вектора направления на Солнце на моменты прохождения подсолнечной точки первого и следующего витков измерения тока от СБ, взятые за вычетом величины времени  лежат в одной плоскости.
лежат в одной плоскости.
Поясним предложенные в способе действия.
На многих КА, например, на международной космической станции (МКС), система управления положением СБ предусматривает выставку СБ в заданные дискретные положения, фиксированные в связанной с КА системе координат, а поворот СБ между данными положениями выполняется с заданной угловой скоростью вращения СБ. При этом для выполнения различных полетных операций предусмотрены различные режимы управления ориентаций СБ, в том числе режим автоматического наведения (отслеживания) СБ на Солнце и режим выставки СБ в заданное положение (такие положения выбираются из перечня упомянутых заданных дискретных положений СБ, фиксированных в связанной с КА системе координат). При этом в режиме автоматического наведения (отслеживания) СБ на Солнце система управления автоматически выбирает момент начала поворота СБ для перевода СБ из текущего фиксированного положения СБ в последующее.
Таким образом в произвольный текущий момент времени СБ находится или в одном из фиксированных положений (в этом случае оно является текущим дискретным фиксированным положением СБ) или в процессе перехода между двумя дискретными фиксированными положениями. При этом в режиме автоматического наведения (отслеживания) СБ на Солнце моменты нахождения панели СБ в одном из дискретных положений определяются по измерениям текущей ориентации КА и измерениям положения Солнца путем определения моментов начала и окончания поворотов СБ с учетом логики автоматического управления СБ в данном режиме.
Считаем, что на этапе выведения КА СБ находятся в сложенном состоянии и раскрываются (развертываются) на орбите, при этом ось раскрытия СБ совпадает с осью вращения СБ. При этом после раскрытия СБ последовательные сегменты СБ могут быть расположены с некоторыми остаточными (технологическими) углами между собой (например, «гармошкой»).
Рассматриваем КА, в системе управления движением ориентацией которых в качестве основных исполнительных органов используются инерционные исполнительные органы - силовые гироскопы (СГ). В этом случае при выполнении разворотов и при поддержании ориентации КА происходит накопление кинетического момента (КМ) СГ и по достижении КМ заданных граничных значений выполняется операция «разгрузки» СГ - приведения КМ в допустимые пределы с помощью реактивных двигателей ориентации (ДО). При этом при выполнении разгрузки СГ требуется дополнительное рабочее тело (топливо) для работы ДО.
Для реализации штатного полета таких КА, как правило, используются специальные режимы ориентации, обеспечивающие благоприятные условия для работы системы СГ - такие, чтобы максимально уменьшать эффект «насыщения» СГ и, тем самым, избегать или по крайней мере уменьшать необходимость их разгрузки (Бебенин Г.Г., Скребушевский Б.С., Соколов Г.А. Системы управления полетом космических аппаратов // М.: Машиностроение, 1978; Скребушевский Б.С. Управление полетом беспилотных космических аппаратов // М.: «Владмо», 2003). Одним из таких режимов ориентации является режим, при котором выполняют построение и поддержание в орбитальной системе координат ориентации КА, при которой суммарный внешний возмущающий момент - момент от воздействия на КА атмосферы и силы тяжести - за виток достигает минимального значения и обеспечивается минимальное накопление кинетического момента гиросистемы.
В предложенном техническом решении для решения поставленной задачи измеряют вектор направления на Солнце в инерциальной системе координат, измеряют значения угла γS между направлением на Солнце и нормалью к плоскости орбиты космического аппарата на моменты времени 
где tS - момент прохождения подсолнечной точки витка;
ωорб - орбитальная угловая скорость космического аппарата;
ϕ - угол между радиус-вектором космического аппарата и проекцией на плоскость орбиты нормали к рабочей поверхности солнечной батареи в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности солнечной батареи элементами конструкции космического аппарата, в поддерживаемой ориентации космического аппарата при положительном отсчете угла в сторону полета.
Подсолнечную точку витка орбиты определяем как точку, в которой проекция направления на Солнце на плоскость орбиты направлена в зенит.
Определяют текущую величину изменения угла между направлением на Солнце и нормалью к плоскости орбиты за виток Δγ, выполняют построение и поддержание в орбитальной системе координат ориентации космического аппарата, при которой воздействующий на космический аппарат внешний возмущающий момент за виток достигает минимального значения.
Реализуют штатный режим автоматического наведения (отслеживания) СБ на Солнце: последовательно разворачивают солнечную батарею в дискретные положения, в которых значение угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце составляет величину менее фиксированного значения, как правило, равного 360°/N, где N - число дискретных положений СБ.
На фиг. 2 показано положение вектора NCБ (вектор нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА) на момент времени  при этом в данный момент вектор NПР (проекция на плоскость орбиты нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА) направлен по вектору SПР (проекция вектора направления на Солнце на плоскость орбиты).
при этом в данный момент вектор NПР (проекция на плоскость орбиты нормали к рабочей поверхности СБ в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности СБ элементами конструкции КА, в поддерживаемой ориентации КА) направлен по вектору SПР (проекция вектора направления на Солнце на плоскость орбиты).
Измеряют ток от солнечной батареи на световом участке витка орбиты, на котором выполнено условие

где λ - угол между нормалью к плоскости орбиты и нормалью к рабочей поверхности солнечной батареи в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности солнечной батареи элементами конструкции космического аппарата, в поддерживаемой ориентации космического аппарата, и повторяют измерения тока на следующем световом участке.
В упомянутые моменты времени tϕ при описанном управлении СБ направление нормали к рабочей поверхности СБ отстоит от направления на Солнце на угол λ-γS. Условие (1) означает, что между данными двумя последовательными витками орбиты направление на Солнце проходит через положение, отстоящее от нормали к плоскости орбиты КА на вышеописанный угол λ.
При этом измеряют моменты времени переориентации солнечной батареи из одного дискретного положения в другое, по которым определяют текущие значения угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце.
Определяют текущее значение расстояние от Земли до Солнца.
В ходе полета повторяют вышеописанные действия и контроль производительности солнечной батареи выполняют по результатам сравнения полученных для упомянутых пар последовательных световых участков витков орбиты осредненных значений тока от солнечной батареи, умноженных на квадрат определенного на моменты соответствующих измерений тока текущего значения расстояния от Земли до Солнца и отнесенных к квадрату среднего расстояния от Земли до Солнца и определенным на моменты соответствующих измерений тока текущим значениям косинуса угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце.
При этом измерения осредняемых значений тока проводятся в моменты времени, определяемые соотношением

где  - момент прохождения подсолнечной точки i-го, i=1, 2 светового участка k-й пары упомянутых последовательных световых участков;
- момент прохождения подсолнечной точки i-го, i=1, 2 светового участка k-й пары упомянутых последовательных световых участков;
ωорб - орбитальная угловая скорость космического аппарата;
ϕ - угол между радиус-вектором космического аппарата и проекцией на плоскость орбиты нормали к рабочей поверхности солнечной батареи в задаваемом дискретном положении, выбираемом из условия минимизации затенения зоны чувствительности солнечной батареи элементами конструкции космического аппарата, в поддерживаемой ориентации космического аппарата при положительном отсчете угла в сторону полета,
Aj - постоянная, задаваемая для j-й точки светового участка, в которой измеряется ток от солнечной батареи.
Например, осредняем значения тока от СБ, полученные на каждой вышеописанной паре последовательных световых участков витков орбиты, по формуле

где Dcp - фиксированное номинальное (среднее) значение расстояния от Земли до Солнца;
Dk - текущее значение расстояния от Земли до Солнца во время k-й пары упомянутых последовательных световых участков;
Ijik - измеренные значения тока в j-й точке i-го светового участка k-й пары упомянутых последовательных световых участков;
γjik - значения угла между нормалью к рабочей поверхности солнечной батареи и направлением на Солнце в j-й точке i-го светового участка k-й пары упомянутых последовательных световых участков;
jik, j=1, …, M - задаваемые точки i-го светового участка k-ой пары упомянутых последовательных световых участков.
На фиг. 2 показаны М=5 точек jik, j=1, …, М, в которых берутся измерения тока от СБ, и показано, что данные точки одинаково расположены относительно точки В на всех описанных световых участках измерения тока от СБ. Таким образом моменты tjik, j=1, …, М, на которые берутся измерения тока от СБ, имеют на всех описанных витках измерения от СБ одинаковое расположение относительно моментов 
В соотношении (3) деление на текущие значения косинуса угла между нормалью к рабочей поверхности СБ и направлением на Солнце обеспечивает одинаковые условия замера тока от СБ в части учета изменений тока от СБ, вызванных отклонением направления солнечного излучения от нормали к СБ. При этом учитывается, что текущий ток I от СБ определятся выражением (Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. Москва. Наука, 1984, с. 109; Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983)
I=IMAXcosα,
где IMAX - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панели СБ перпендикулярно солнечным лучам; α - угол между направлением на Солнце и нормалью к рабочей поверхности СБ.
В соотношении (3) умножение на квадрат текущего значения расстояния от Земли до Солнца обеспечивает одинаковые условия замера тока от СБ в части учета изменений тока от СБ, вызванных отклонением текущего значения внеатмосферной интенсивности солнечной радиации от фиксированного номинального (среднего) значения. При этом учитывается, что текущее значение внеатмосферной интенсивности солнечной радиации с достаточной степенью точности обратно пропорционально значению расстояния от Земли до Солнца (Макарова Е.А., Харитонов А.В. Распределение энергии в спектре Солнца и солнечная постоянная, М., 1972; Поток энергии Солнца и его изменения, под ред. О. Уайта, пер. с англ., М., 1980; Кмито А.А., Скляров Ю.А. Пиргелиометрия, Л.)
Bcp - фиксированное номинальное (среднее) значение внеатмосферной интенсивности солнечной радиации;
Bk - текущее значение внеатмосферной интенсивности солнечной радиации во время k-й пары упомянутых последовательных световых участков.
Использование описанных двух последовательных витков, между которыми направление на Солнце переходит через положение, отстоящее от нормали к плоскости орбиты КА на вышеописанный угол λ, обеспечивает измерение тока от СБ в моменты, когда направление на Солнце лежит в плоскости вращения нормали к рабочей поверхности СБ - плоскости, перпендикулярной оси вращения СБ, совпадающей с осью раскрытия СБ, - с точностью текущей величины изменения угла между направлением на Солнце и нормалью к плоскости орбиты за виток Δγ, которая, например, для КА типа МКС, движущихся по околокруговой орбите 300-400 км, величина Δγ составляет величину порядка 0,3 градуса. Это обеспечивает одинаковые условия освещения Солнцем последовательных сегментов «гармошки» СБ, расположенных с технологическими углами между собой.
Использование для измерения тока от СБ двух световых участков, а именно двух световых участков на двух последовательных витках орбиты, позволяет обеспечить осреднение влияния подсветки СБ уходящим (отраженным) от Земли излучением.
Действительно, например для КА, движущегося по околокруговой орбите высотой 300-400 км, (например, МКС) при положении Солнца, близком к плоскости орбиты продолжительность светового участка витка составляет порядка 56 мин (порядка 2/3 периода обращения КА), что соответствует длине трассы КА на поверхности Земли более 25 тыс. км. При этом в каждый момент времени видимая с КА подстилающая поверхность составляет площадь более 12 млн. кв. км.
При пролете над освещенной подстилающей поверхностью СБ КА подсвечиваются уходящим (отраженным) от Земли излучением, при этом яркость излучения зависит от вида/типа подстилающей поверхности. Использование двух световых участков обеспечивает получение измерений тока над более чем 50 тыс. км трассы полета, что позволяет обоснованно заключить о прохождении КА над многообразными видами/типами подстилающей поверхности. Таким образом обеспечивается осреднение влияния подсветки СБ уходящим от Земли излучением.
В ходе полета повторяют вышеописанные действия на различных этапах полета КА, для каждого этапа полета получают осредненное на описанной паре последовательных световых участков витков орбиты значение тока, рассчитываемое по соотношению (3), и контроль текущей производительности панели СБ осуществляют по результатам сравнения получаемых осредненных значений.
Опишем технический эффект предлагаемого изобретения.
При эксплуатации в открытом космосе СБ подвергаются воздействию факторов открытого космического пространства, что приводит к их постепенной «деградации». Контроль производительности панели СБ, в частности, связан с получением текущих значений параметров производительности панели СБ и количественных оценок ее текущей эффективности.
Предлагаемое техническое решение позволяет обеспечить одинаковые условия замера тока от СБ при выполнении сеансов оценки эффективности СБ по результатам прямого замера электрического тока, генерируемого СБ на фоне штатного полета КА с инерционными исполнительными органами.
При этом обеспечиваются одинаковые условия замера тока от СБ с учетом изменений тока от СБ, вызванных как отклонением направления солнечного излучения от нормали к СБ, так и вызванных изменениями текущего значения внеатмосферной интенсивности солнечной радиации, технологическими углами между последовательными сегментами «гармошки» СБ и подсветкой СБ уходящим от Земли излучения.
Одинаковые условия замера тока от СБ при выполнении сеансов оценки эффективности СБ позволяют получать сопоставимые данные в произвольные моменты полета КА, обоснованно сравнивать получаемые измерения и судить по ним об изменениях и текущей производительности СБ.
Знание текущих значений параметров производительности СБ необходимо для более точного моделирования функционирования СЭС КА в полете, например, для прогнозирования генерации тока СБ при решении различных задач управления полета КА, а также своевременно выявлять моменты снижения эффективности СБ. Таким образом, получаемый технический эффект повышает эффективность контроля производительности СЭС КА, в том числе повышает точность оценки текущей эффективности СБ в ходе штатного полета КА с инерционными исполнительными органами.
Данный технический результат достигается путем определения значений предложенных углов, измерения ток от СБ в предложенные моменты времени в предложенной штатной ориентации КА с инерционными исполнительными органами при предложенной ориентации СБ и выполнения контроля производительности панели СБ по результатам сравнения полученных осредненных значений тока от СБ, взятых с учетом предложенной зависимости от предложенных параметров.
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.



Способ определения орбиты космического аппарата с аппаратурой для съёмки подстилающей поверхности
Способ управления транспортной космической системой при перелёте космического корабля с окололунной орбиты на околоземную орбиту
Способ привязки выполненных с космического аппарата снимков земной поверхности
Дублированный электронасосный агрегат
Способ контроля эффективности солнечной батареи космического аппарата
Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Способ привязки выполненных с орбитального космического аппарата снимков подстилающей поверхности
Планетарный редуктор
Способ управления размещенной на космическом корабле переносной аппаратурой наблюдения
Электронасосный агрегат
Способ управления передвижением космонавта к идентифицируемым объектам на космической станции и система для его осуществления
Способ тарировки датчика микроускорений в условиях космического полета
Способ управления снабженным солнечными батареями космическим аппаратом
Способ управления снабженным солнечными батареями космическим аппаратом
Устройство для выбора объектов наблюдения с орбитального космического аппарата
Способ определения альбедо земли
Способ определения максимальной выходной мощности солнечных батарей космического аппарата и система для его осуществления
Способ контроля лесного пожара с космического аппарата
Способ контроля лесного пожара с космического аппарата
Способ управления космическим аппаратом с имеющими одну степень свободы солнечными батареями

