Результат интеллектуальной деятельности: Стенд для измерения нагрузок, воздействующих на объект авиационной техники
Вид РИД
Изобретение
Изобретение относится к устройствам, предназначенным для аэродинамических испытаний, и может быть использовано в авиастроении для аэродинамических испытаний объектов авиационной техники.
При испытаниях объекта авиационной техники, например, сверхзвукового летательного аппарата (ЛА) или его составных частей (фюзеляжа, крыльев, стабилизирующих поверхностей, двигателя, интегрированного в ЛА) для определения воздействующей на ЛА или его части суммарной силы определяют ее составляющие по трем ортогональным осям, а также аэродинамические моменты вокруг этих осей. Все эти величины возникают под воздействием силы тяги двигателя, а также пульсаций давления при обтекании потоком воздуха поверхностей корпуса и составных частей ЛА и являются важными характеристиками его аэродинамических свойств.
Известен стенд по патенту RU 2276279 для измерения компонент силы тяги реактивного двигателя с отклоняемым вектором тяги. Стенд включает динамометрическую платформу для монтажа испытываемого двигателя, установленную при помощи гибких стоек на опорную раму с возможностью горизонтального перемещения по осям X и Z, три силоизмерительных датчика для измерения составляющих ±Rx, ±Ry, ±Rz силы тяги, установленных на опорной раме, рычажные передачи для обеспечения вертикального перемещения динамометрической платформы под действием компоненты силы тяги ±Ry, а также дополнительные рычажные передачи с грузами расчетного веса для обеспечения безлюфтовой работы при определении значений компонент тяги при реверсивной работе двигателя.
Равенство передаточных отношений у двух пар параллельно работающих силоприемных рычагов, воспринимающих нагрузку от динамометрической платформы, и двух пар силоизмерительных рычагов, взаимодействующих с силоизмерительными датчиками, обеспечивает уравновешивание сил на соединяющих их шарнирах от моментов относительно осей X, Y, Z, что исключает взаимовлияние сил на измеряемые компоненты сил тяги ±Rx, ±Ry, ±Rz.
Сложная конструкция стенда, наличие механических связей и многократная передача усилий через рычаги снижает точность и надежность измерения компонент тяги. Кроме того, при проведении высотных испытаний крупноразмерных моделей ЛА и их двигательных установок испытуемый объект размещают в ограниченных по объему аэродинамическом сопле и кормовом диффузоре термобарокамеры, в которой моделируются сверхзвуковые скорости полета. Применение различных схем и конструкций весов механического типа в связи с их большими размерами и сложной конструкцией не представляется возможным.
Наиболее близким аналогом заявляемого технического решения является стенд для измерения вертикальной нагрузки, воздействующей на объект авиационной техники (патент RU 127464). Стенд содержит динамометрическую платформу с закрепленным на ней объектом, установленную на неподвижную опорную раму посредством четырех гибких стоек, например, жестко закрепленных с платформой и рамой пластин. Гибкие стойки обеспечивают возможность перемещения динамометрической платформы по трем ортогональным осям. Каждая стойка включает средний жесткий участок, на котором установлены трехкомпонентные пьезоэлектрические датчики виброускорений со встроенными усилителями напряжения. Такая стойка может быть выполнена в виде пластины с двумя гибкими участками, каждый из которых сопряжен с жесткими участками. Одна из трех ортогональных измерительных осей каждого датчика направлена вдоль гибкой стойки. Усилители напряжения через кабели подключены к источникам питания. Источники питания через кабели подсоединены к регистратору-анализатору сигналов напряжения.
При испытании объекта авиационной техники виброускорения поперечных колебаний гибких пластин регистрируются датчиками виброускорений. Собственная частота поперечных колебаний каждой гибкой пластины изменяется в зависимости от приложенной к ней вертикальной силы, совпадающей с ее осью. До или после испытаний выполняется расчет собственных частот поперечных колебаний гибкой пластины в зависимости от приложенной к ней вдоль ее оси вертикальной нагрузки. Для экспериментально зарегистрированных частот собственных поперечных колебаний гибкой пластины по расчетным зависимостям определяют значения величины вертикальной нагрузки, действующей на гибкую стойку. По алгебраической сумме вертикальных нагрузок, действующих на каждую гибкую стойку, определяется равнодействующая вертикальная нагрузка (сила), действующая на объект авиационной техники. Кроме того, по равнодействующей вертикальной силе можно вычислить момент тангажа М(тнж) относительно выбранной в пространстве точки, в качестве которой может рассматриваться центр масс объекта авиационной техники.
Стенд компактен и конструктивно прост, однако не позволяет измерить усилия, действующие вдоль осей, направленных в продольном и поперечном направлениях к объекту, и определить по ним момент рысканья и момент тангажа.
Среди устройств, предназначенных для аэродинамических испытаний объектов авиационной техники, не выявлены стенды с широкими функциональными возможностями, достаточно простые и компактные для применения в условиях, имитирующих высотный полет, позволяющие измерять вертикальную, продольную и поперечную нагрузки, действующие на объект, и по результатам измерений определять моменты крена, рысканья и тангажа.
Таким образом, техническая проблема заключается в том, что при испытаниях ЛА не обеспечивается имитация всех нагрузок (вертикальной, продольной и поперечной, моментов крена, рысканья и тангажа), действующих на ЛА.
Предлагаемый стенд для измерения нагрузок, воздействующих на объект авиационной техники, обладает всеми требуемыми функциональными характеристиками: в жестких условиях испытаний, связанных с имитацией высотного сверхзвукового полета, в том числе в условиях пространственного ограничения, позволяет определить все компоненты нагрузки, моменты крена, рысканья и тангажа.
Технический результат заключается в том, что стенд для измерения нагрузок, воздействующих на объект авиационной техники, обеспечивает повышение точности имитации условий сверхзвукового полета ЛА.
Стенд для измерения нагрузок, воздействующих на объект авиационной техники включает динамометрическую платформу, предназначенную для закрепления объекта, установленную посредством по меньшей мере четырех пластин переменной жесткости на неподвижную опорную платформу с возможностью перемещения динамометрической платформы по трем ортогональным осям, причем каждая пластина выполнена с гибким участком, сопряженным с жесткими участками, и снабжена элементом измерения нагрузки, и отличается тем, что дополнительно содержит датчик, регистрирующий продольные перемещения динамометрической платформы и предназначенный для измерения продольной нагрузки, а элемент измерения нагрузки выполнен в виде двух пар одинаковых тензорезисторных датчиков, предназначенных для измерения вертикальных и поперечных нагрузок, установленных на хотя бы одном гибком участке каждой пластины на одном уровне относительно неподвижной опорной платформы, датчики каждой пары установлены на противоположных широких сторонах пластины, причем вертикальные оси симметрии чувствительных элементов датчиков одной пары ориентированы вдоль вертикальной оси симметрии широкой стороны пластины, а вертикальные оси симметрии чувствительных элементов датчиков другой пары параллельны ей, датчики подключены в одно плечо отдельных измерительных мостов, причем датчики каждой пары подключены последовательно.
Существенные признаки изобретения позволяют
- определять моменты тангажа, крена, рысканья;
- измерять продольную нагрузку, воздействующую на объект авиационной техники, с помощью датчика, регистрирующего продольные перемещения динамометрической платформы и предназначенного для измерения продольной нагрузки (датчик силы), взаимодействующего с динамометрической платформой и неподвижной опорной платформой;
- измерять вертикальную и поперечную нагрузки с использованием следующих технических решений:
- попарная установка одинаковых тензорезисторных датчиков на одном уровне относительно неподвижной опорной пластины, с последовательным включением датчиков пары в одно плечо измерительного моста позволяет исключить влияние продольной нагрузки на показание измерительного моста;
- установка одной пары датчиков вдоль вертикальной оси симметрии широкой стороны пластины (нейтральной оси) с последовательным включением датчиков пары в одно плечо измерительного моста позволяет исключить влияние поперечной нагрузки на показание измерительного моста и измерить вертикальную нагрузку, действующую на испытываемый объект;
- установка второй пары датчиков параллельно первой паре, на том же уровне, со сдвигом только по горизонтали, с последовательным включением датчиков пары в одно плечо измерительного моста, позволяет определить поперечную нагрузку по напряжениям на измерительных мостах, возникающим под действием вертикальной и поперечной нагрузок и измеренным отдельно напряжениям на измерительных мостах, возникающих под действием вертикальных нагрузок.
Для описания возможной конструкции стенда и его работы представлены фиг. 1-12, где
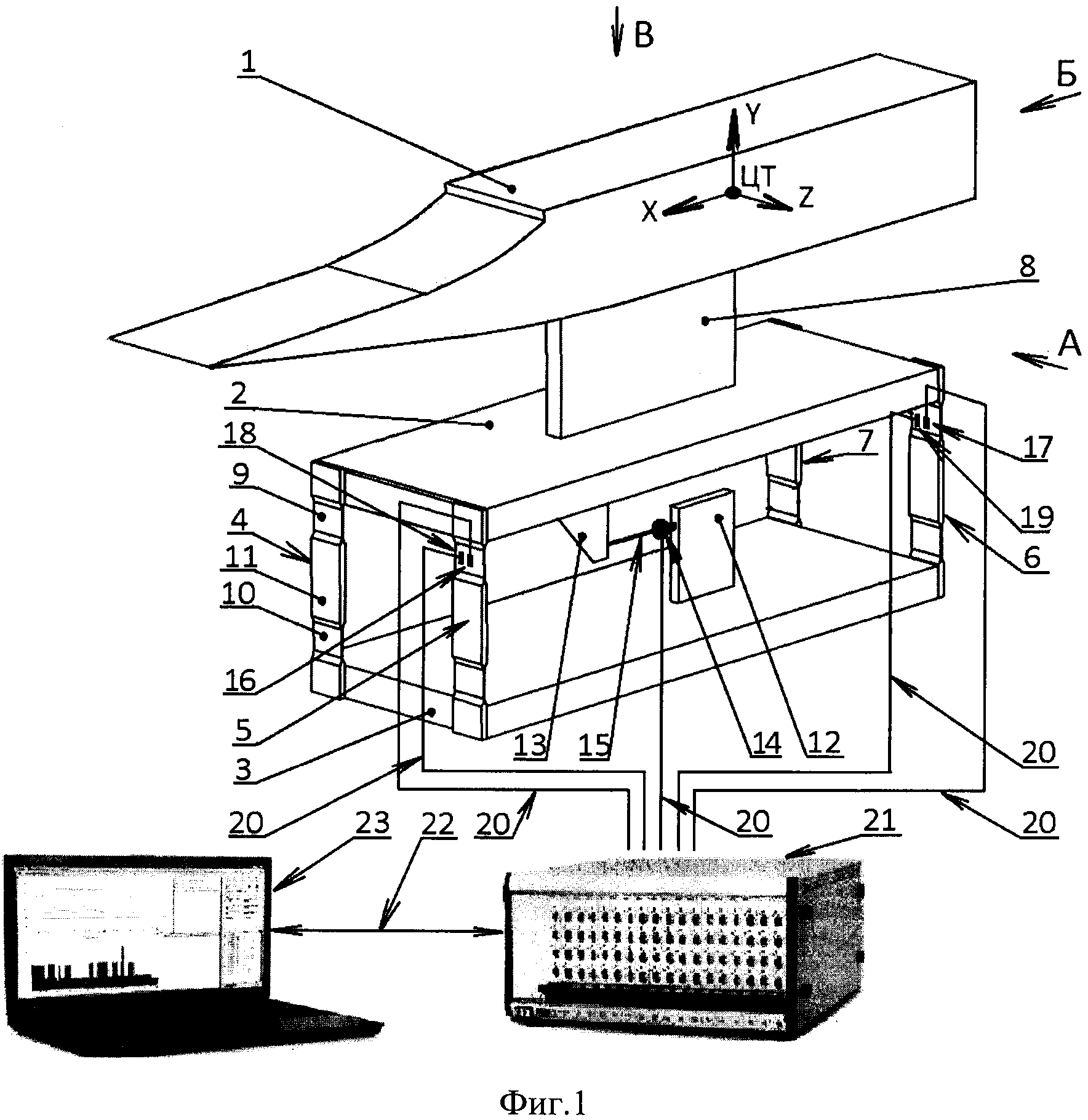
на фиг. 1 изображена в аксонометрической проекции динамометрическая платформа с закрепленным на ней объектом авиационной техники, установленная на опорной платформе;
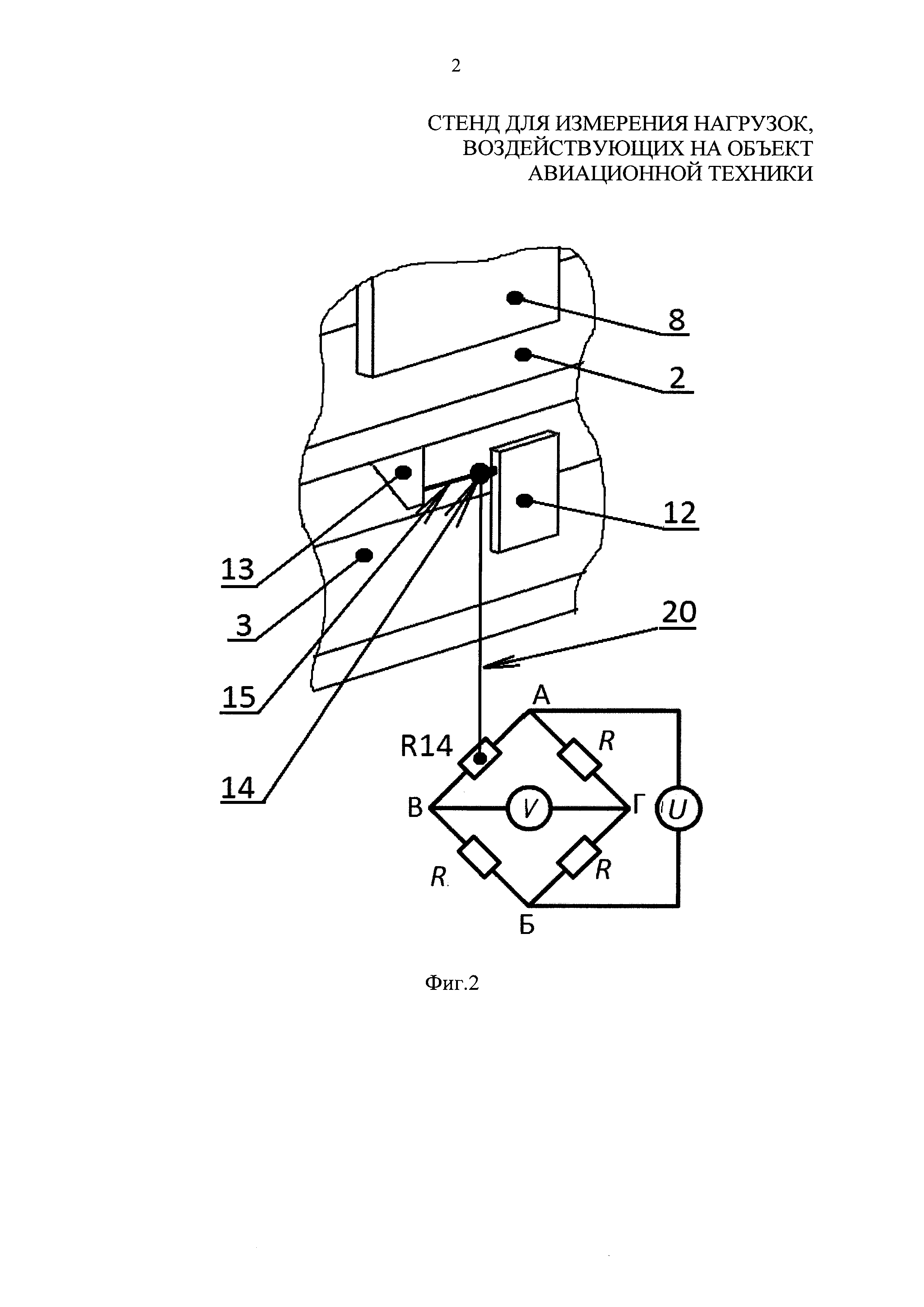
на фиг. 2 изображен датчик силы, соединенный с динамометрической платформой и опорной платформой через тягу и упоры и через выводные проводники включенный в одно плечо отдельного измерительного моста;
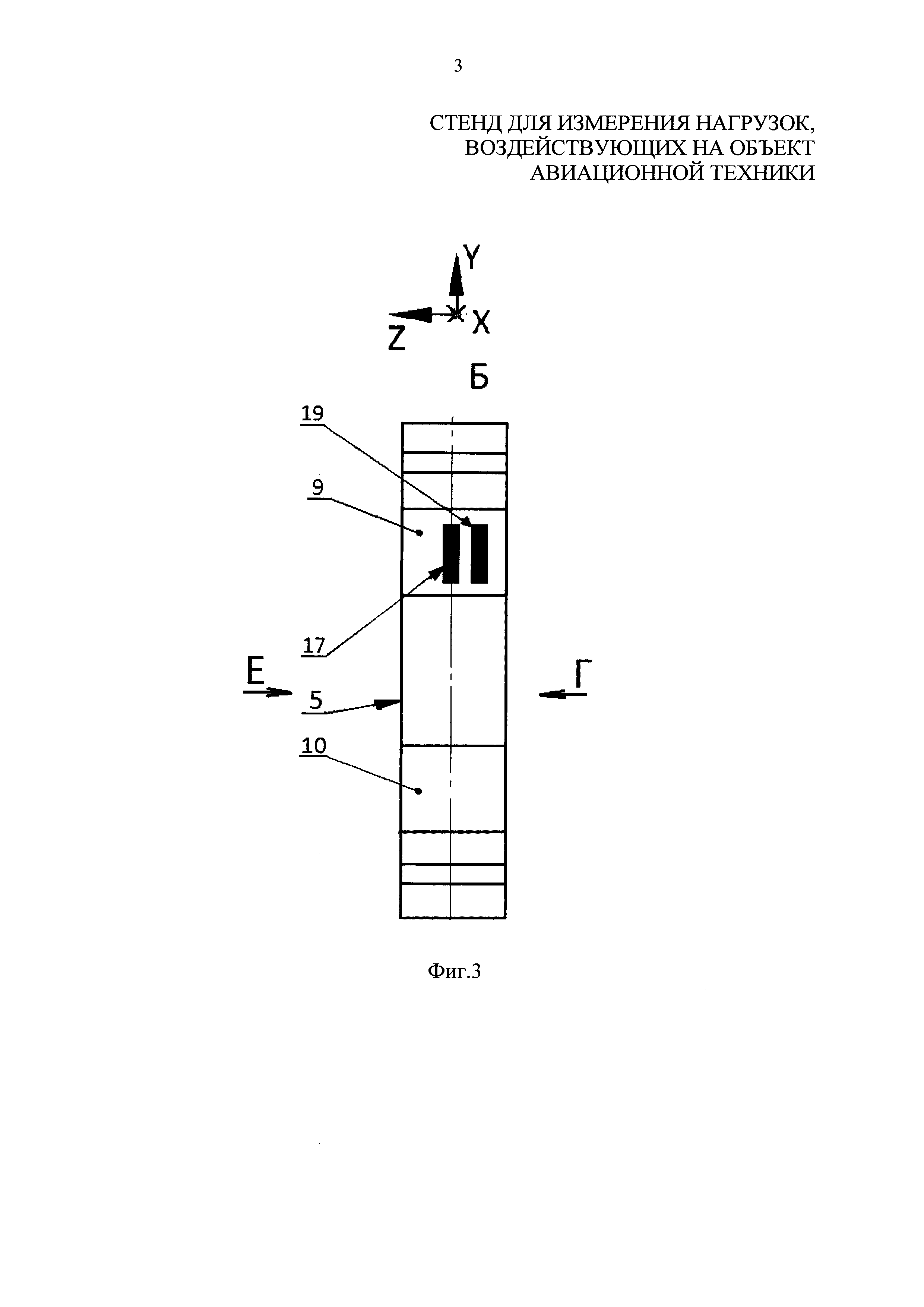
на фиг. 3 представлен вид пластины с тензорезисторными датчиками, в недеформированном состоянии;
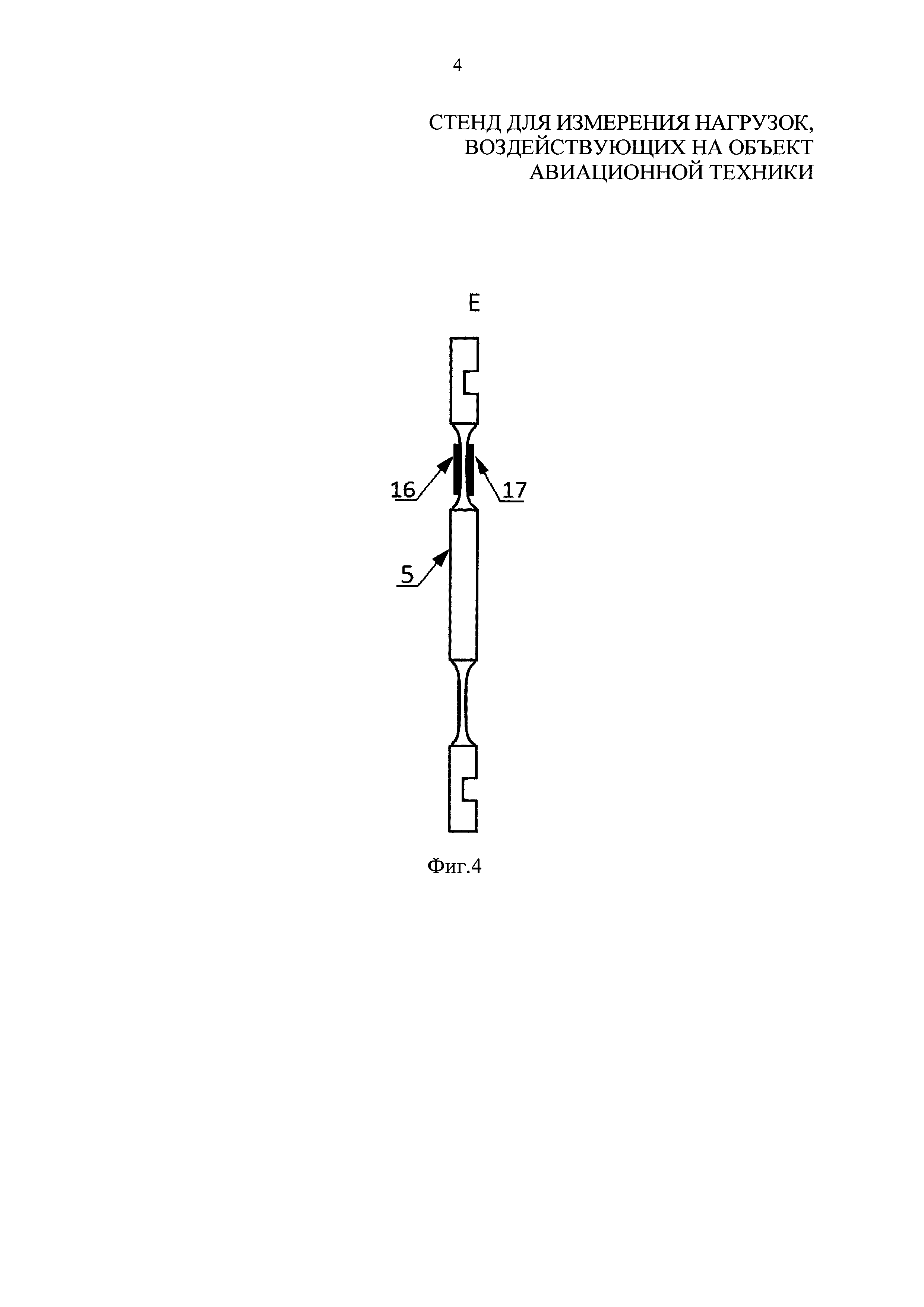
на фиг. 4 представлен вид E, указанный на фиг. 3 (вид пластины слева);
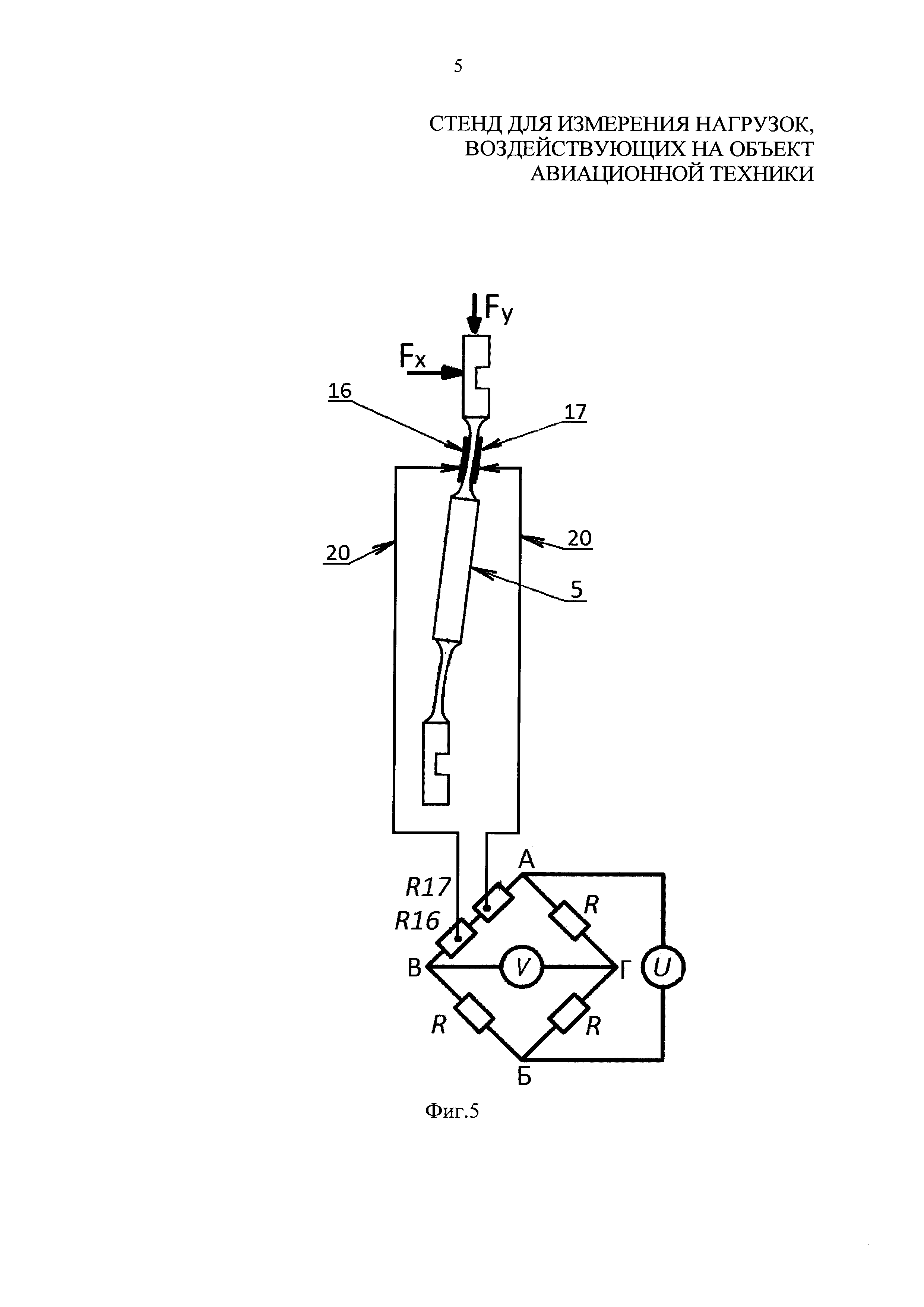
на фиг. 5 представлен вид слева пластины в деформированном состоянии под воздействием вертикальной Fy и горизонтальной продольной Fx нагрузок;
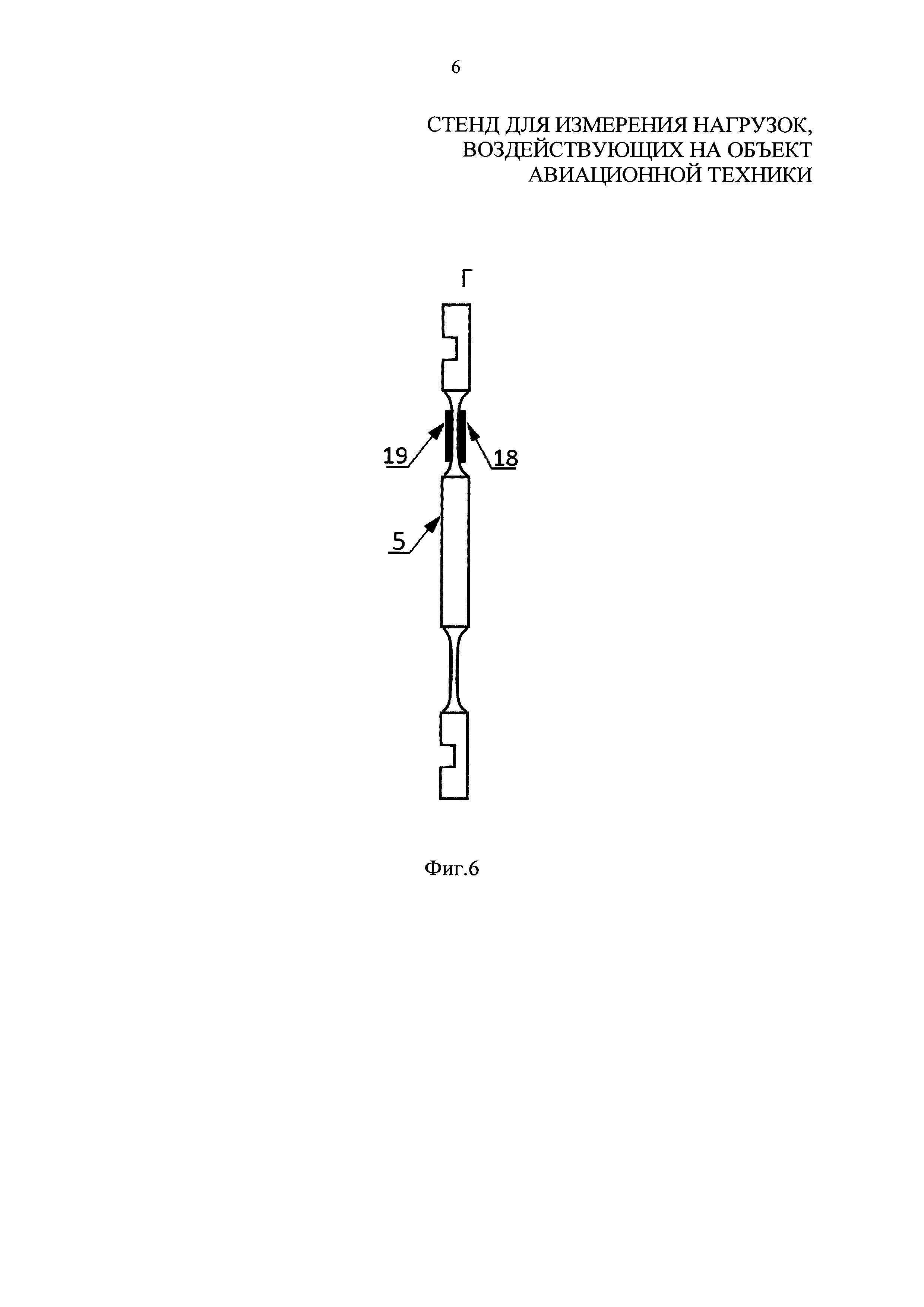
на фиг. 6 представлен вид Г, указанный на фиг. 3 пластины (вид справа);
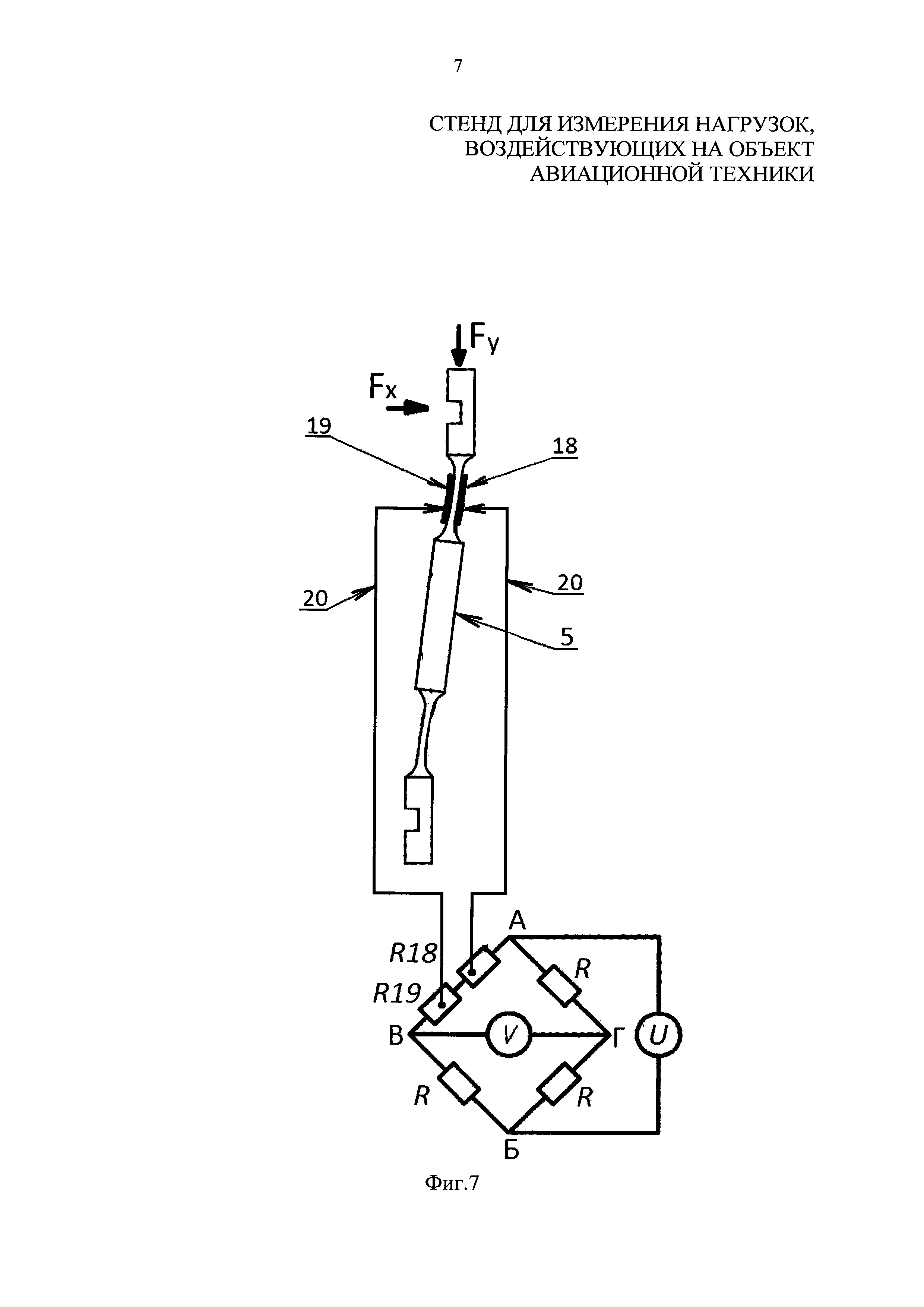
на фиг. 7 представлен вид пластины справа в деформированном состоянии под воздействием вертикальной Fy и горизонтальной продольной Fx нагрузок;
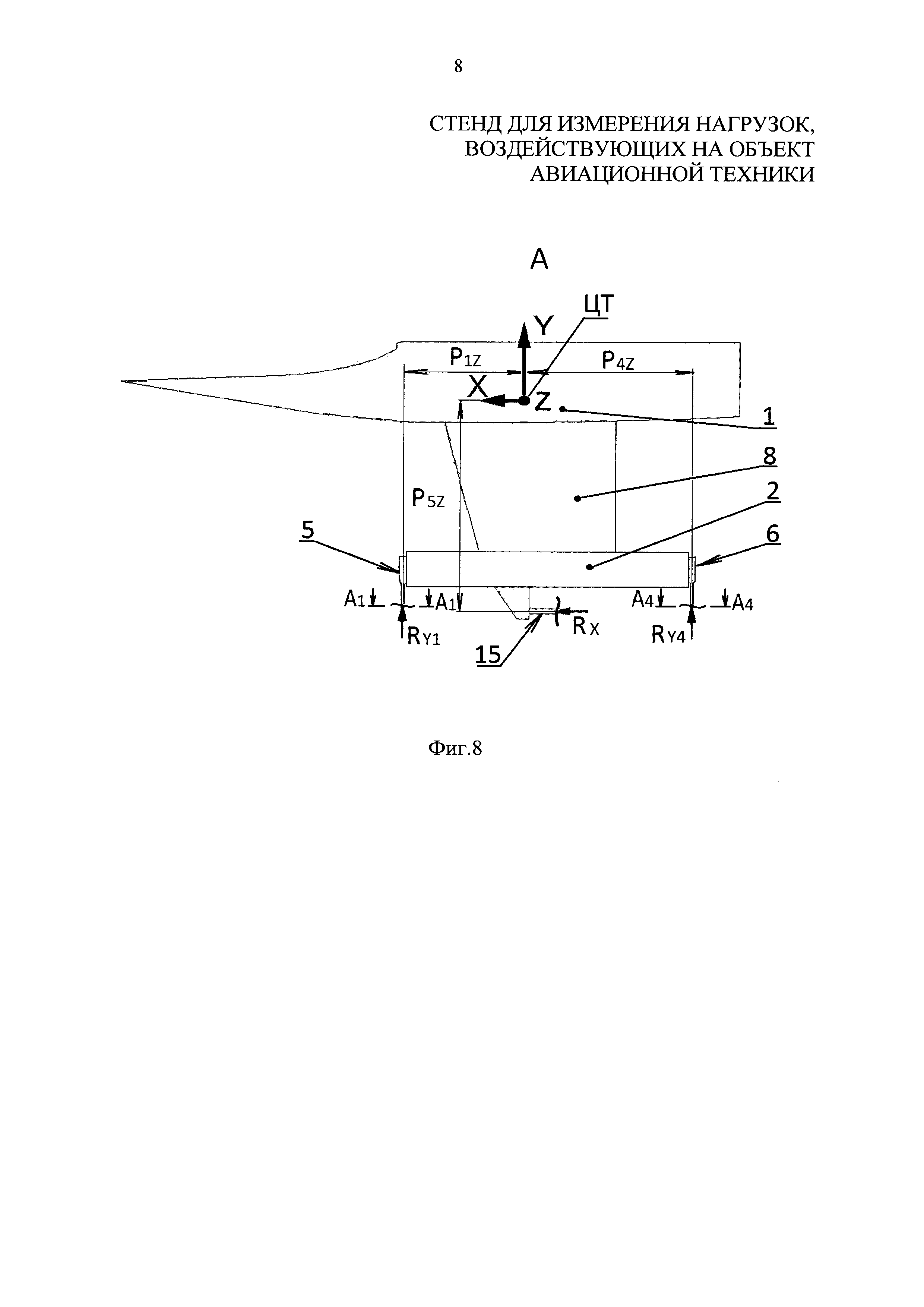
на фиг. 8 представлен местный вид А (фиг. 1) с указанием внутренних сил;
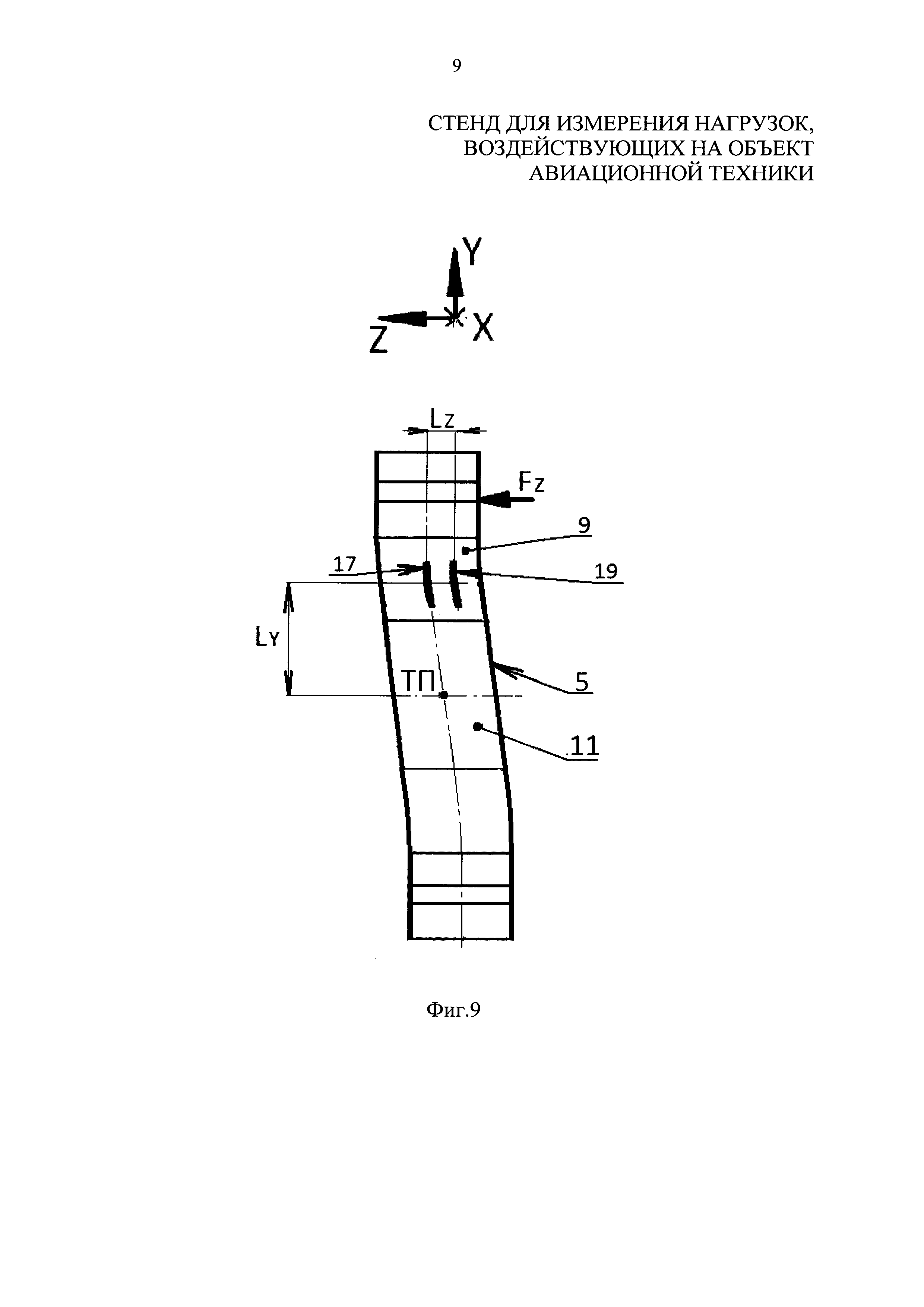
на фиг. 9 представлена пластина в деформированном состоянии под действием горизонтальной поперечной нагрузки Fz;
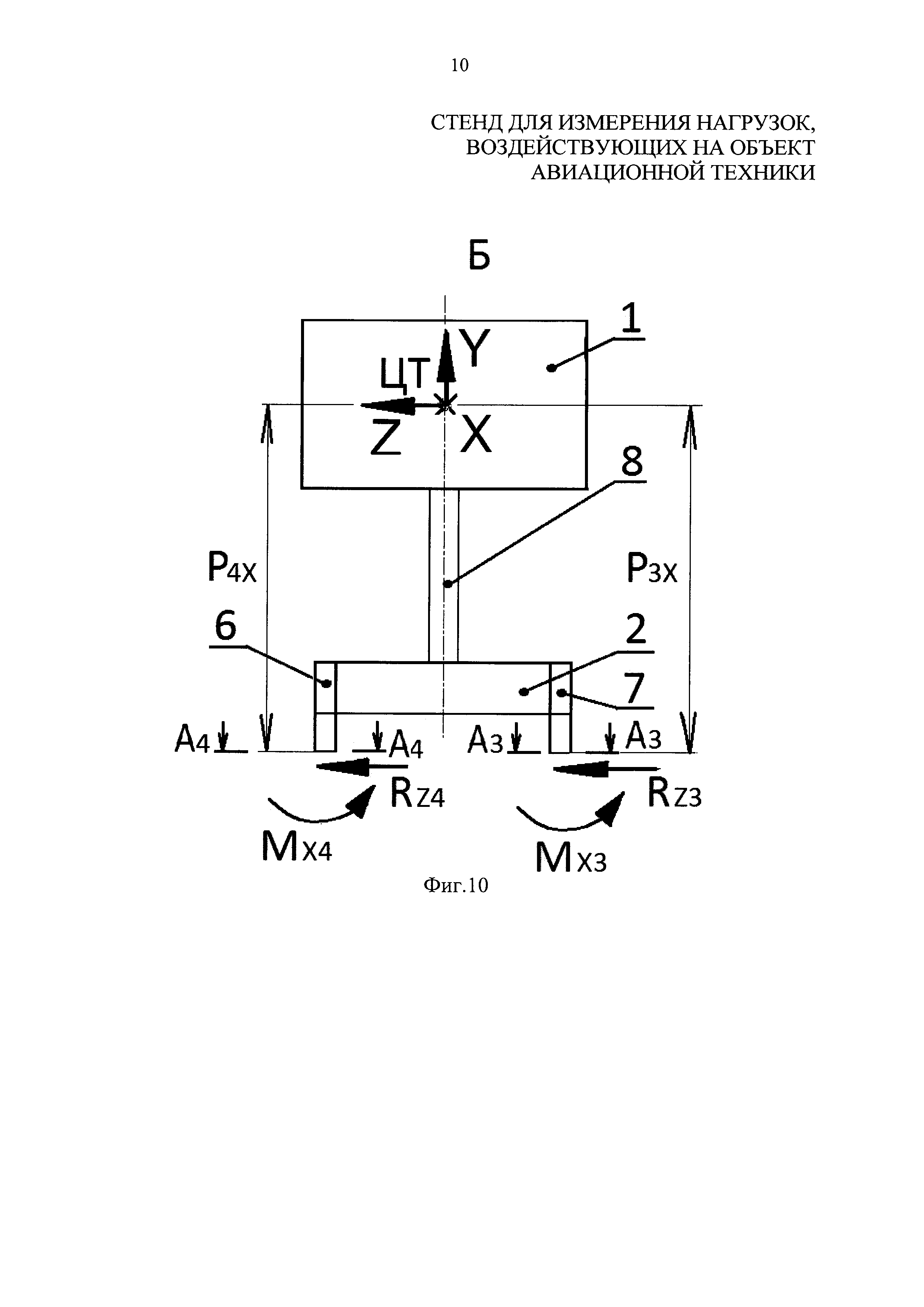
на фиг. 10 представлен местный вид Б (фиг. 1) с указанием внутренних поперечных сил и моментов;
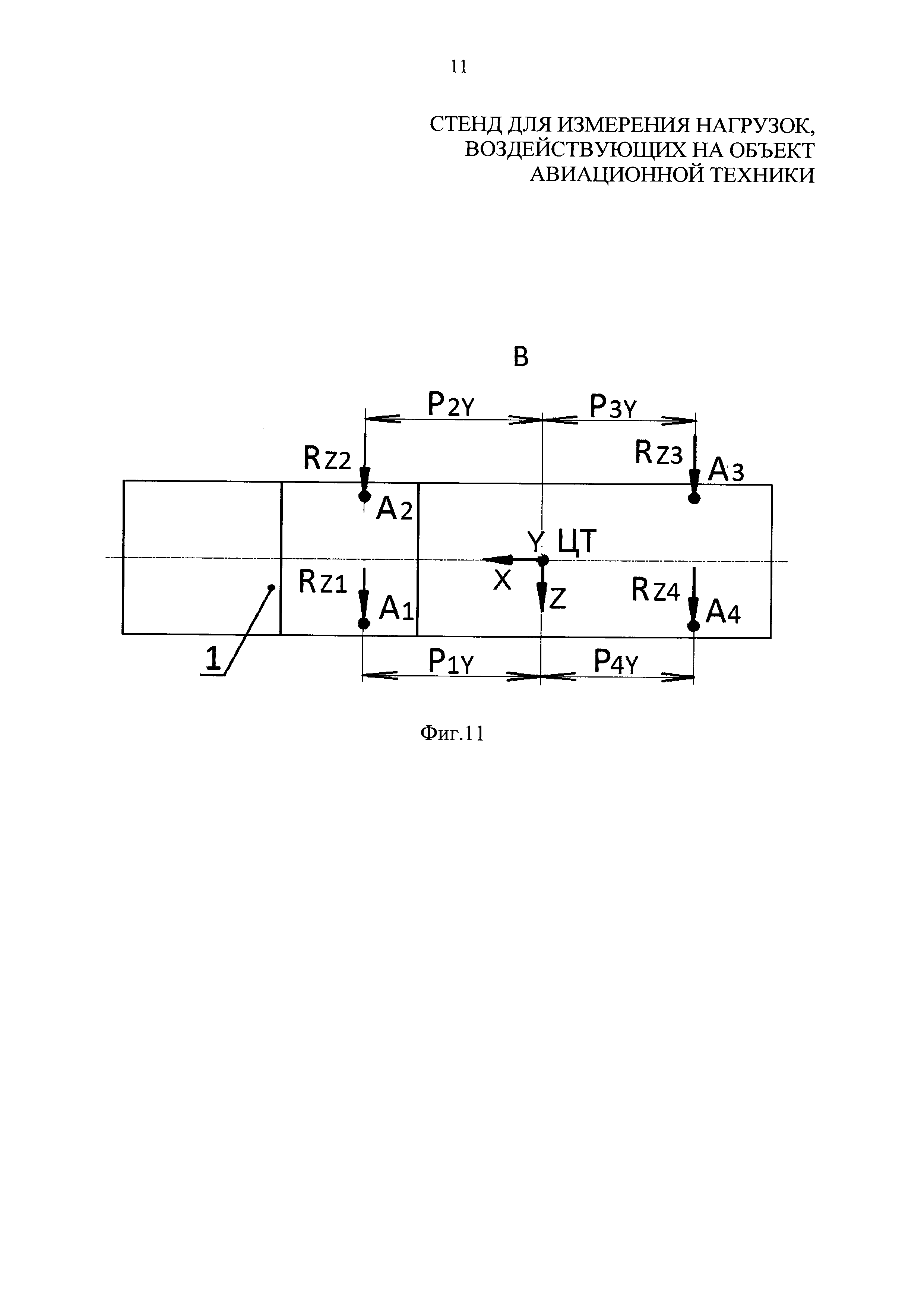
на фиг. 11 представлен вид В (фиг. 1) с указанием внутренних поперечных сил;
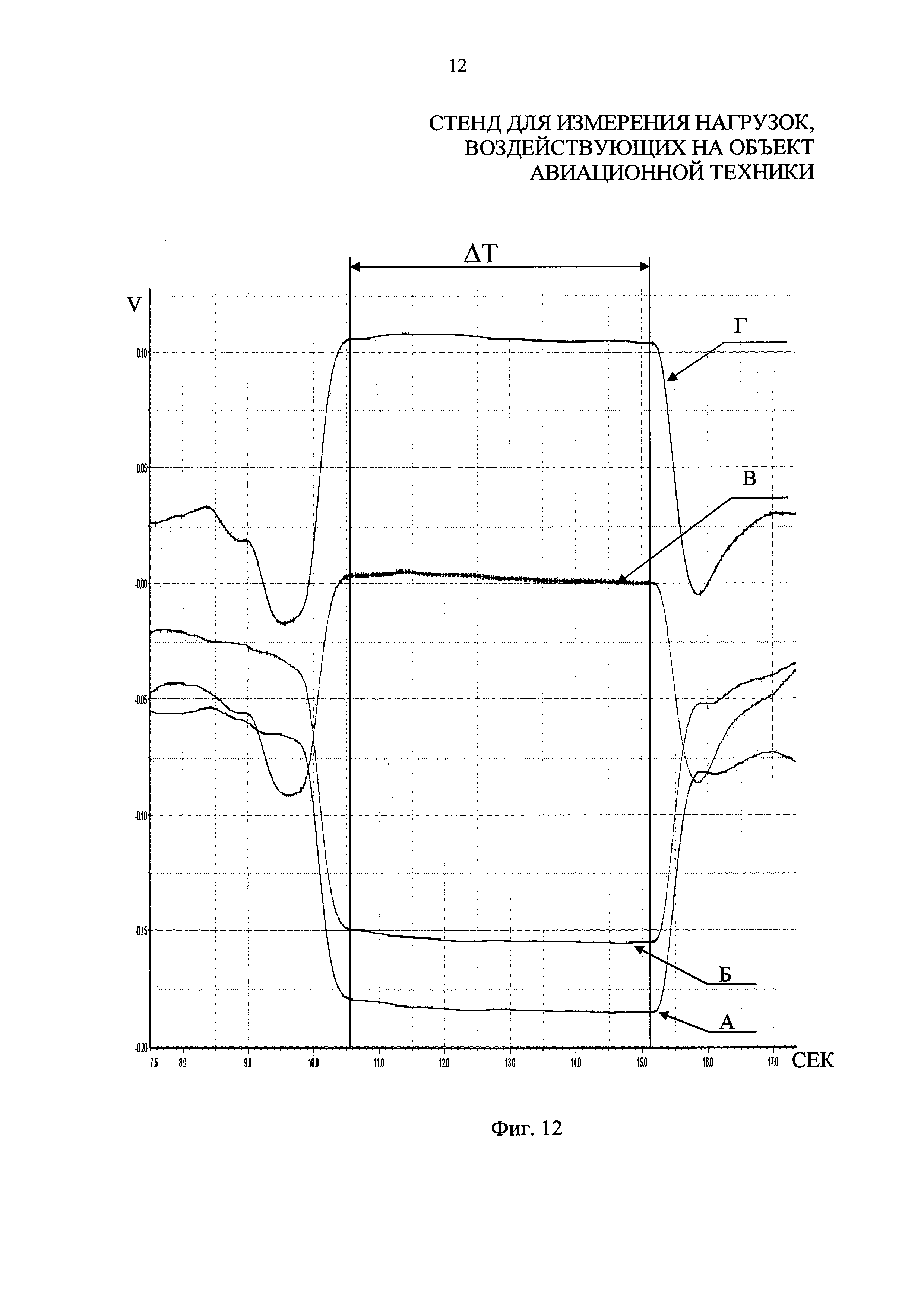
на фиг. 12 изображены зарегистрированные во время высотных испытаний сигналы с измерительных диагоналей отдельных измерительных мостов, к каждому из которых подключены пары датчиков с каждой пластины, расположенные на оси симметрии большей ее поверхности.
Стенд для измерения нагрузок, воздействующих на исследуемый объект 1, например, объект авиационной техники (фиг. 1), содержит подвижную динамометрическую платформу 2 с закрепленным на ней объектом 1 и неподвижную опорную платформу 3. Платформы 2 и 3 соединены между собой по углам посредством четырех гибких пластин 4, 5, 6, 7, которые обеспечивают возможность перемещения платформы 2 по трем ортогональным осям, причем ее поверхность остается практически параллельной горизонтальной плоскости неподвижной платформы 3. Неподвижная платформа 3 жестко связана с корпусом барокамеры (не показано). Объект 1 закреплен на динамометрической платформе 2 при помощи обтекаемого пилона 8. Гибкие пластины закрепляют на противоположных сторонах динамометрической платформы и соответствующих им сторонах неподвижной платформы параллельными парами, обеспечивая параллельность поверхностей платформ, причем каждая пара пластин симметрично расположена на стороне динамометрической платформы (на фиг. 1 - по углам платформы 2).
Гибкие пластины представляют собой пластины переменной жесткости с хотя бы одним гибким участком, сопряженным с жесткими участками. Гибкие участки имеют параллельные плоские поверхности, на которых устанавливают тензометрические датчики. Предпочтительно каждая пластина (фиг. 3) выполнена с двумя гибкими участками 9 и 10, сопряженными с центральным жестким участком 11 (показано на пластине 4, фиг. 1) и двумя крайними, которыми пластины прикрепляются к динамометрической и неподвижной платформам. На фиг. 3-9 пластины имеют прямоугольные выемки в верхней и нижней частях для крепления к платформам. Пластины имеют продольную и, предпочтительно, поперечную плоскости симметрии.
К неподвижной платформе 3 со стороны динамометрической платформы 2 прикреплен упор 12 с датчиком силы 14, а к платформе 2 со стороны платформы 3 - упор 13 с жестко связанной с ним тягой 15, ось которой параллельна продольной оси симметрии динамометрической платформы (фиг. 1, 2) и совпадает с осью датчика силы 14. Датчик силы 14 регистрирует продольные перемещения динамометрической платформы и предназначен для измерения продольной нагрузки. В варианте исполнения стенда, представленном на фиг. 1, используют тензорезисторный датчик силы.
На хотя бы одном гибком участке каждой пластины размещают тензорезисторные датчики, предназначенные для измерения вертикальных и поперечных нагрузок, причем на всех пластинах устанавливают одинаковые датчики. В представленном варианте исполнения стенда (фиг. 1) датчики установлены на верхнем гибком участке 9 каждой пластины. Датчики размещают на параллельных широких сторонах гибкого участка пластины двумя парами. На (фиг. 1, 3, 4, 5, 6, 7, 9) указаны датчики 16, 18, расположенные с внешней стороны пластины 5, и датчики 17, 19, расположенные с внутренней стороны пластины 6. Чувствительный элемент датчика выполнен прямоугольным, имеет оси симметрии, обычно обозначенные метками на корпусе датчика, что облегчает его установку. Датчики установлены на одном уровне относительно поверхности неподвижной платформы 3, то есть фронтальные проекции датчиков каждой пары датчиков совпадают, совпадают также профильные проекции датчиков 16, 18 и 17, 19, расположенных на одной стороне пластины. Вертикальные оси симметрии чувствительных элементов датчиков 16, 17 одной пары ориентированы вдоль вертикальной оси симметрии широкой стороны пластины, а вертикальные оси симметрии чувствительных элементов датчиков 18, 19 другой пары параллельны ей.
Тензорезисторные датчики каждой пары, установленные на пластинах, через выводные проводники 20 последовательно подключены в одно плечо отдельного измерительного моста (фиг. 5, 7). Тензорезисторный датчик силы 14 через выводные проводники 20 также подключен в одно плечо отдельного измерительного моста (фиг. 2). Измерительный мост состоит из четырех сопротивлений (плеч) и соединен с отдельным аналого-цифровым измерительным преобразователем (АЦП) со встроенным источником питания и измерительным усилителем сигнала датчика. К точкам А, Б моста подводится напряжение питания U, а точки В, Г подключены к измерительным усилителям АЦП. Все АЦП включены в состав многоканального регистратора-анализатора сигналов 21, связанного высокоскоростным каналом связи 22 со станцией 23 сбора и обработки данных (фиг. 1). Объект 1 в сборе с динамометрической платформой 2 и неподвижной опорной платформой 3 может быть установлен в барокамере (не показано).
Стенд для измерения нагрузок, воздействующих на объект авиационной техники, работает следующим образом. Объект 1, установленный на пилоне 8, обтекается потоком воздуха, имитирующим полетные условия, и перемещается вместе с динамометрической платформой 2, которая связана с неподвижной платформой 3 гибкими пластинами 4, 5, 6, 7 (фиг. 1). Жесткое закрепление гибких пластин к подвижной платформе 2 и неподвижной платформе 3 допускает перемещение подвижной платформы 2 в продольном, вертикальном и поперечном направлениях, причем ее поверхность остается практически параллельной горизонтальной плоскости платформы 3 при незначительных перемещениях, возникающих при испытаниях.
При продольных перемещениях подвижной динамометрической платформы 2 на жестко связанный с ней через упор 13 и тягу 15 тензорезисторный датчик силы 14, прикрепленный к упору 12 на неподвижной платформе 3, передается растягивающая или сжимающая нагрузка Fx. При этом происходит увеличение или уменьшение длины чувствительного элемента датчика в зависимости от направления перемещения подвижной платформы 2. Тензорезисторный датчик силы 14 последовательно включен через выводной проводник 20 в одно плечо отдельного измерительного моста (фиг. 2). При изменении длины чувствительного элемента тензорезисторного датчика силы 14 меняется его сопротивление R14 и, соответственно, сопротивление плеча, в которое он включен. Поэтому между точками В и Г измерительной диагонали моста появляется разность потенциалов (напряжение разбаланса моста), регистрируемая измерительным усилителем АЦП. Зарегистрированное между точками В и Г измерительной диагонали моста напряжение V (фиг. 2) на выходе из АЦП, входящего в состав многоканального регистратора-анализатора сигналов 21, преобразуется в цифровой код, который по высокоскоростному каналу связи 22 передается на станцию сбора и обработки данных 23 (фиг. 1).
Результаты измерений обрабатываются по программе, в которой предполагается, что в напряженно-деформированном состоянии датчик 14 находится в пределах упругих деформаций. Тогда зависимость между показаниями датчика силы 14 и величиной действующей на него растягивающей или сжимающей горизонтальной нагрузки Fx также будет линейной. Коэффициент пропорциональности Кх, имеющий размерность [Н/В], определяется предварительно на стенде в ходе тарировочного нагружения растягивающими или сжимающими силами. Значение продольной нагрузки Fx определяется по зарегистрированному между точками В и Г измерительной диагонали моста напряжения V и коэффициенту пропорциональности Кх:

Действительный знак продольной нагрузки Fx будет определяться знаком измеренного напряжения V между точками В и Г измерительной диагонали моста, в который включен датчик 14 (фиг. 2). Знак плюс соответствует растягивающим, а знак минус - сжимающим продольным силам.
Под действием нагрузки Fx, вызывающей продольное перемещение динамометрической платформы (фиг. 5, 7), вследствие изгибных деформаций пластин изменения длины датчиков пары будут одинаковы по величине, но противоположны по знаку: со стороны растяжения пластины - увеличение длины и уменьшение - со стороны сжатия пластины. Поэтому при сложении сопротивлений от изгибных составляющих деформаций каждого датчика из отдельной пары R16, R17 и R18, R19, включенных последовательно в одно плечо отдельного измерительного моста, изменения сопротивлений взаимно уничтожатся, напряжение на мосте не регистрируется.
Под действием нагрузки Fy, вызывающей вертикальное перемещение динамометрической платформы, изменение длин и сопротивлений всех датчиков будут одинаковы и по величине, и по знаку. Сопротивление каждой пары датчиков, включенных в плечо отдельного моста последовательно, будет равно удвоенному сопротивлению одного датчика. При условии, что в напряженно-деформированном состоянии гибкие участки пластин находятся в пределах упругих деформаций, величина вертикальной нагрузки, действующей на каждую пластину, будет пропорциональна регистрируемому напряжению разбаланса моста:

где Ку - коэффициент пропорциональности, [Н/В], V - напряжение между точками В и Г измерительной диагонали моста, [В].
Коэффициент пропорциональности Ку определяется предварительно на стенде, в ходе тарировочного нагружения. Для всех пластин коэффициент пропорциональности Ку одинаков, поскольку одинаковы и пластины, и датчики.
Равнодействующая вертикальная нагрузка Fy (рав) равна алгебраической сумме вертикальных нагрузок, действующих на каждую гибкую стойку:

где Fy1, Fy2, Fy3, Fy4 - нагрузки, определяемые с помощью датчиков 16, 17, установленных вдоль вертикальных осей симметрии широких сторон пластин (фиг. 1, 3, 5).
Действительные знаки вертикальных нагрузок, действующих на каждую пластину, будут определяться знаками измеренных напряжений V между точками В и Г измерительных диагоналей отдельных мостов, к одному плечу которых подключены датчики 16, 17 (см. фиг. 5). Знак плюс соответствует растягивающим, а знак минус - сжимающим стойку вертикальным силам.
За нулевое значение измерений для каждой пластины принимается начальное значение напряжения V между точками В и Г измерительной диагонали отдельной пары датчиков, когда гибкие пластины уже нагружены весом испытуемого объекта 1, установленного на подвижной динамометрической платформе 2 при помощи обтекаемого пилона 8 (см. фиг. 1). В этом случае нет необходимости заранее знать вес объекта и учитывать его при обработке результатов измерений, полученных в процессе испытания.
При определении равнодействующей вертикальной нагрузки Fy(рав) учитываются только вертикальные нагрузки Fy, определенные с помощью датчиков 16, 17, установленных вдоль вертикальных осей симметрии широких сторон пластин (см. фиг. 1, 3, 5), то есть так, что вертикальные оси симметрии чувствительных элементов и фронтальных сечений датчиков 16, 17 совпадают с вертикальными осями симметрии широких сторон пластин (фиг. 3). При деформации этих датчиков от изгиба при поперечных перемещениях динамометрической платформы под действием поперечной нагрузки Fz (см. фиг. 9) их длина останется без изменения, так как вертикальные оси симметрии широких сторон пластин и оси симметрии фронтальных сечений каждого датчика совпадают с их нейтральными осями. Следовательно, сопротивления датчиков при такой деформации не изменяются. Поэтому регистрируемые на соответствующих измерительных мостах напряжения изменяются только под действием вертикальной нагрузки на испытуемый объект.
Для каждого из пары тензорезисторных датчиков 18, 19 (фиг. 1, 3), установленных параллельно вертикальным осям симметрии широких сторон пластин, изменение длины и сопротивления будет происходить от деформаций сжатия и растяжения, вызванных действием вертикальной нагрузки, и деформаций от изгиба, вызванных действием поперечной нагрузки при пространственном перемещении динамометрической платформы (см. фиг. 7, 9). Поэтому суммарное изменение длины и соответственно изменение сопротивления каждого из пары датчиков будет определяться деформациями сжатия (растяжения) и изгиба.
По величинам моментов внутренних сил, действующих относительно оси Z, проходящей через центр тяжести объекта (ЦТ), определяется момент тангажа М(тнж). Пример такой расчетной схемы приведен на фиг. 8. Внутренние растягивающие или сжимающие вертикальные силы в поперечных сечениях гибких участков каждой пластины определены по результатам измерений. При расчете принимается, что внутренняя растягивающая вертикальная сила Ry1=Fy1 действует в поперечном сечении А1 гибкого участка пластины 5, внутренняя растягивающая вертикальная сила Ry4=Fy4 действует в поперечном сечении А4 гибкого участка пластины 6 (фиг. 1, 8), внутренняя растягивающая вертикальная сила Ry2=Fy2 действует в поперечном сечении А2 (не показано) гибкого участка пластины 4 (фиг. 1), а внутренняя растягивающая вертикальная сила Ry3=Fy3 действует в поперечном сечении A3 (не показано) гибкого участка пластины 7 (фиг. 1). В поперечном сечении тяги 15 действует внутренняя растягивающая продольная сила Rx=Fx. Момент тангажа определяют по формуле

где P1z, P2z, P3z, P4z - расстояния между плоскостью YZ, проходящей через центр тяжести, и параллельными ей плоскостями, проходящими через вертикальные оси симметрии каждой пластины, P5z - расстояние между плоскостью XZ, проходящей через центр тяжести, и параллельной ей плоскостью, проходящей через горизонтальную ось симметрии тяги; расстояние равно длине отрезка, перпендикулярного к указанным плоскостям.
При суммировании знак плюс соответствует моментам, действующим против часовой стрелки, а знак минус соответствует моментам, действующим по часовой стрелке. Знаки моментов в (4) определяются согласно сформулированному правилу в соответствии с выбранными на схеме расчета направлениями внутренних вертикальных сил Ry и продольной силы Rx. Действительные знаки вертикальных нагрузок Fy, действующих на каждую пластину 4, 5, 6, 7, и продольной нагрузки Fx, действующей на тягу 15 (фиг. 1), будут определяться знаками измеренных напряжений V между точками В и Г измерительных диагоналей отдельных мостов. Знак плюс соответствует растягивающим, а знак минус - сжимающим пластины и тягу 15 нагрузкам (формулы 1, 2).
Под действием поперечной нагрузки Fz, вызывающей поперечное перемещение динамометрической платформы, как уже отмечено, длина датчиков 16, 17 не изменяется. Тогда как вызванное деформацией от изгиба изменение длин и сопротивлений датчиков 18, 19, расположенных не на нейтральных осях сторон пластин, будут одинаковы и по величине, и по знаку (фиг. 9). Суммарное изменение сопротивления каждой такой пары датчиков равно удвоенному изменению сопротивления одного датчика.
Каждый из пары датчиков 18, 19 будет изменять длину и сопротивление от деформаций сжатия (растяжения) пластин, вызванных вертикальным перемещением динамометрической платформы под действием вертикальной нагрузки Fy. При этом изменения длин и сопротивлений датчиков 18, 19 на каждой пластине будут одинаковы и по величине, и по знаку, и суммарное сопротивление подключенных последовательно в одно плечо датчиков 18, 19 (фиг. 7) будет равно удвоенному сопротивлению одного датчика.
Изменение длины и сопротивления каждого датчика 18, 19 на всех пластинах от изгиба под действием поперечной нагрузки Fz (фиг. 9) и от сжатия (растяжения) под действием вертикальной нагрузки Fy (фиг. 7) будет равно сумме изменения длины и сопротивления от каждой силы. В напряженно-деформированном состоянии все датчики находятся в пределах упругих деформаций, поэтому напряжение V(сум) между точками В и Г измерительных диагоналей каждого моста, в одно плечо которого включена пара датчиков 18, 19, будет также равно сумме напряжений, вызванных изменением сопротивлений датчиков от изгиба V(изг) и сжатия (растяжения) V(сж):

Напряжение V(сж) одинаково для каждой пары датчиков 16, 17 и 18, 19 на одной пластине и измерено для пары датчиков 16, 17, поэтому напряжение от изменения сопротивления датчиков 18, 19 от изгиба V(изг) будет определяться разностью между суммарным V(сум) напряжением между точками В и Г с измерительной диагонали отдельного моста, в одно плечо которого включена пара датчиков 18, 19 (фиг. 7), и напряжением между точками В и Г с измерительной диагонали отдельного моста, в одно плечо которого включена пара датчиков 16, 17 (фиг. 5).
Для определения поперечной нагрузки Fz вычисляют внутренний изгибающий момент Мх, действующий в сечениях гибких участков 9 каждой пластины, где расположены тензорезисторные датчики 16, 18 (фиг. 9), в направлении оси X относительно центра тяжести сечения пластины, по соотношению:

где J - момент инерции поперечного сечения гибкого участка пластины относительно оси, параллельной оси X, проходящей через центр тяжести поперечного сечения пластины в месте расположения датчиков (фиг. 9);
S - площадь поперечного сечения гибкого участка пластины в месте расположения датчиков;
V(изг) - напряжение между точками В и Г измерительной диагонали отдельного моста, вызванное изменением сопротивлений датчиков 18, 19 только от изгиба под действием поперечной силы Fz;
Lz - расстояние между центрами фронтальных сечений датчиков 16 и 18;
Kу - коэффициент пропорциональности, имеющий размерность [Н/В], определенный непосредственно на стенде, в ходе тарировочного нагружения (см. фиг. 1) динамометрической платформы 2 растягивающими или сжимающими вертикальными силами Fy.
Знак плюс соответствует моменту, действующему против часовой стрелки согласно приведенной на фиг. 9 схеме расчета. Действительные знаки изгибающих моментов Мх, действующих на каждую пластину, будут определяться знаками вычисленных по соотношениям (5) напряжений V(изг). Знаки V(сум) и V(сж) в соотношении (5) определяются знаками измеренных напряжений (фиг. 5,7).
Как отмечалось, коэффициенты пропорциональности Ку, определяющие зависимость между приложенными вертикальными силами при тарировке и напряжениями V(сж) между точками В и Г измерительных диагоналей моста (см. фиг. 5), одинаковы для одинаковых пластин и тензорезисторных датчиков в пределах упругих деформаций. Поэтому для деформаций пластин и датчиков под действием вертикальной нагрузки Fy и поперечной нагрузки Fz выполняется свойство линейности, когда суммарная деформация и изменение сопротивления равны сумме изменения длин и сопротивлений датчиков от каждой силы в отдельности. Поэтому полагается, что коэффициенты пропорциональности Кz, имеющие размерность [Н/В], определяющие линейную зависимость между приложенными поперечными силами Fz и напряжениями V(изг) на измерительных мостах с датчиками 18, 19, одинаковы для всех пластин и принимаются равными Ку.
В соотношении (6) для внутреннего изгибающего момента Мх в сечениях гибких участков 9 каждой пластины, где расположены тензорезисторные датчики 16, 18, V(изг) определяется удвоенным изменением сопротивления каждого из датчиков 18, 19, и коэффициент 2 в знаменателе учитывает изменение напряжения при изменении сопротивления только одного датчика 18 (фиг. 9) под действием поперечной нагрузки Fz.
При известном значении внутреннего изгибающего момента Мх поперечная сила Fz определяется соотношением

где Ly - расстояние между двумя плоскостями, параллельными плоскости XZ, одна из которых проходит через точку перегиба, которая для пластины использованной конструкции расположена на середине нейтральной оси широкой стороны, другая - через горизонтальную ось симметрии чувствительных элементов датчиков 16, 18 или 17, 19.
Действительные знаки поперечных нагрузок Fz, действующих на каждую пластину, будут определяться действительными знаками внутренних изгибающих моментов Мх, вычисленных по соотношениям (6).
Для определения равнодействующей поперечной нагрузки Fz(рав), действующей на испытуемый объект, проводится алгебраическое суммирование поперечных сил, действующих на каждую пластину:

Значение поперечной нагрузки Fz, определяемой по соотношениям (6, 7), в предложенной схеме установки тензорезисторных датчиков на каждой пластине не зависит от расстояний Lz и Ly, определяющих места установки датчиков (фиг. 1, 3, 9). В направлении оси Z на каждую пластину действует только поперечная нагрузка Fz. Поэтому при деформации пластины от изгиба под действием поперечной нагрузки Fz величина изгибающего момента Мх для каждой пластины изменяется только при перемещении датчиков вдоль оси Y так, что в соотношении (7) при изменении расстояния Ly значение поперечной нагрузки Fz должно оставаться постоянным. Для каждого поперечного сечения гибкого участка пластины с датчиками, характеризуемого расстоянием Ly от точки перегиба (ТП), момент Мх будет иметь постоянное значение, определяемое интегралом от эпюры напряжений, возникающих в этом сечении при изгибе от действия поперечной нагрузки Fz. Поэтому при изменении расстояния Lz из-за перемены расположения на пластинах датчиков 19 вдоль оси Z (фиг. 9), под действием поперечной силы Fz произойдет изменение их длин и сопротивлений и, следовательно, напряжений Vизг вследствие деформаций от изгиба, вызванных действием поперечной силы Fz. Однако эти деформации и вызванные ими напряжения от изгиба в поперечных сечениях гибких участков пластины будут такими, что полученные по результатам измерений и их обработки с использованием соотношений (6) значения изгибающих моментов Мх не будут зависеть от изменения расстояний Lz, определяющих взаимное расположении датчиков 16, 18 или 17, 19 на стойке, при заданном значении Ly.
Момент крена М(крн) определяется суммой моментов от внутренних поперечных Rz сил и изгибающих моментов Мх, действующих в поперечных сечениях гибких участков 9 всех пластин (см. фиг. 1, 10) относительно оси X, проходящей через центр тяжести ЦТ объекта 1 (фиг. 10). Пример расчетной схемы приведен на фиг. 10. Внутренние изгибающие силы Rz3, Rz4 в поперечных сечениях верхних гибких участков каждой пластины 6,7 равны по величине поперечным нагрузкам Fz, действующим на каждую пластину. При расчете принимается, что внутренняя поперечная сила Rz3=Fz3 действует в поперечном сечении A3 верхнего гибкого участка пластины 7, а внутренняя поперечная сила Rz4=Fz4 действует в поперечном сечении А4 верхнего гибкого пластины 6 (фиг. 1, 10). Для расчета принимается, что внутренняя поперечная сила Rz1=Fz1 (фиг. 11) действует в поперечном сечении A1 (не показано) верхнего гибкого участка пластины 5 (фиг. 1), а внутренняя поперечная сила Rz2=Fz2 (фиг. 11) действует в поперечном сечении А2 (не показано) верхнего гибкого участка пластины 4 (фиг. 1). Принимается, что направления действия внутренних поперечных сил Rz1, Rz2 совпадают с направлениями действия внутренних поперечных сил Rz3, Rz4.
В поперечных сечениях A3, А4 пластин 7, 6 (фиг. 1, 10) действуют в направлении оси X относительно центра тяжести (ЦТ) объекта 1 внутренние изгибающие моменты Мх3, Мх4, определенные по результатам измерений и расчетам по соотношениям (6, 7). Также для расчета принимается, что в поперечных сечениях A1, А2 пластин 5, 4 (фиг. 1) действуют в направлении оси X относительно центра тяжести (ЦТ) объекта 1 внутренние изгибающие моменты Mx1, Мх2 (не показано). В схеме расчета принимается, что направление действия изгибающих моментов Mx1, Мх2 совпадает с направлением действия изгибающих моментов Мх3, Мх4.
Момент крена М(крн) согласно приведенной на фиг. 10 схеме расчета определяется по соотношению

где P1x, Р2х, Р3х, Р4х - расстояния между плоскостью XZ, проходящей через центр тяжести, и параллельными ей плоскостями, проходящими через поперечные сечения A1, А2, A3, А4 каждой пластины (фиг. 1, 10). Расстояния равны длинам отрезков, перпендикулярных указанным плоскостям.
При суммировании знак плюс соответствует моментам, действующим против часовой стрелки, а знак минус соответствует моментам, действующим по часовой стрелке при принятой на фиг. 10 схеме расчета. Действительные знаки моментов в (9) будут определяться знаками поперечных нагрузок Fz, действующих на каждую стойку, вычисленных по соотношениям (7).
Момент рысканья М(рск) определяется суммой моментов внутренних поперечных сил Rz, действующих в поперечных сечениях верхних гибких участков 9 всех пластин относительно оси Y, проходящей через центр тяжести ЦТ объекта 1 (фиг. 1, 10, 11). Внутренние поперечные силы Rz1, Rz2, Rz3, Rz4 равны по величине определенным по результатам измерений и расчетам по соотношениям (6, 7) поперечным силам Fz, действующим на каждую пластину. Принимается, что направления действия всех внутренних поперечных сил совпадают (фиг. 11).
Момент рысканья М(рск) согласно приведенной на фиг. 11 схеме расчета определяется по соотношению

где P1y, Р2у, Р3у, Р4у - расстояния между плоскостью YZ, проходящей через центр тяжести (ЦТ), и параллельными ей плоскостями, проходящими через поперечные сечения A1, A2, A3, А4 каждой пластины (фиг. 1, 10, 11). Расстояния равны длинам отрезков, перпендикулярных указанным плоскостям.
При суммировании знак плюс соответствует моментам, действующим против часовой стрелки, а знак минус соответствует моментам, действующим по часовой стрелке. Действительные знаки моментов в (10) будут определяться знаками поперечных нагрузок Fz, действующих на каждую пластину, вычисленным по соотношениям (6, 7).
На фиг. 12 приведены зарегистрированные во время высотных испытаний объекта (сверхзвукового ЛА) сигналы измеренных напряжений V между точками В и Г измерительных диагоналей отдельных мостов, к одному плечу которых подключена пара датчиков 16, 17 (см. фиг. 5), установленных на наружных и внутренних широких сторонах верхних гибких участков пластин 4, 5, 6, 7 вдоль вертикальных осей симметрии (нейтральных осей) этих сторон (фиг. 1, 3, 4). Временной интервал ΔT соответствует рабочему режиму при работающей двигательной установке ЛА. Средние значения измеренных напряжений на этом интервале равны следующим значениям:
пластина 5 (линия А) - V5=-0.184 В; пластина 4 (линия Б) - V4=-0.153 В;
пластина 7 (линия В) - V7=+0.002; пластина 6 (линия Г) - V6=+0.106 В.
Значение коэффициента пропорциональности Ку, определенного в ходе тарировочного нагружения растягивающими и сжимающими вертикальными силами подвижной платформы 2 с установленным на ней при помощи обтекаемого пилона 8 объекта 1 (фиг. 1), составило Ку=13800 [Н/В]. Вертикальные нагрузки Fy, действующие на каждую пластину, согласно (2) принимают следующие значения:
Fy5≈-2539 Н, Fy4≈-2111 Н, Fy5≈+28 Н, Fy6≈+1463 Н.
Равнодействующая вертикальная нагрузка Fy(рав), действующая на ЛА, согласно (3) равна алгебраической сумме всех вертикальных нагрузок:
Fy(рав)=Fy1+Fy2+Fy3+Fy4=-3159 H.
Это означает, что при работающей двигательной установке носовая часть сверхзвукового ЛА будет наклонена вниз, а кормовая часть ЛА будет поднята вверх (фиг. 1, 8). При стендовых испытаниях относительно горизонтальной плоскости ЛА перевернут по отношению к его положению при полете. Поэтому для летных условий полученный на стенде результат означает, что при работающей двигательной установке на ЛА действует положительная подъемная сила Fпод=3159 Н.
Предложенное техническое решение обеспечивает определение по предложенной схеме измерений продольных, вертикальных и поперечных нагрузок, воздействующих на объект авиационной техники при его обдуве потоком воздуха на стенде в барокамере, имитирующим высотные условия полета, а также позволяет определить моменты крена, рысканья и тангажа.
Стенд для измерения нагрузок, воздействующих на объект авиационной техники, включающий динамометрическую платформу, предназначенную для закрепления объекта, установленную посредством по меньшей мере четырех пластин переменной жесткости на неподвижную опорную платформу с возможностью перемещения динамометрической платформы по трем ортогональным осям, причем каждая пластина выполнена с гибким участком, сопряженным с жесткими участками, и снабжена элементом измерения нагрузки, отличающийся тем, что содержит датчик, регистрирующий продольные перемещения динамометрической платформы и предназначенный для измерения продольной нагрузки, а элемент измерения нагрузки выполнен в виде двух пар одинаковых тензорезисторных датчиков, предназначенных для измерения вертикальных и поперечных нагрузок, установленных на хотя бы одном гибком участке каждой пластины на одном уровне относительно неподвижной опорной платформы, датчики каждой пары установлены на противоположных широких сторонах пластины, причем вертикальные оси симметрии чувствительных элементов датчиков одной пары ориентированы вдоль вертикальной оси симметрии широкой стороны пластины, а вертикальные оси симметрии чувствительных элементов датчиков другой пары параллельны ей, датчики подключены в одно плечо отдельных измерительных мостов, причем датчики каждой пары подключены последовательно.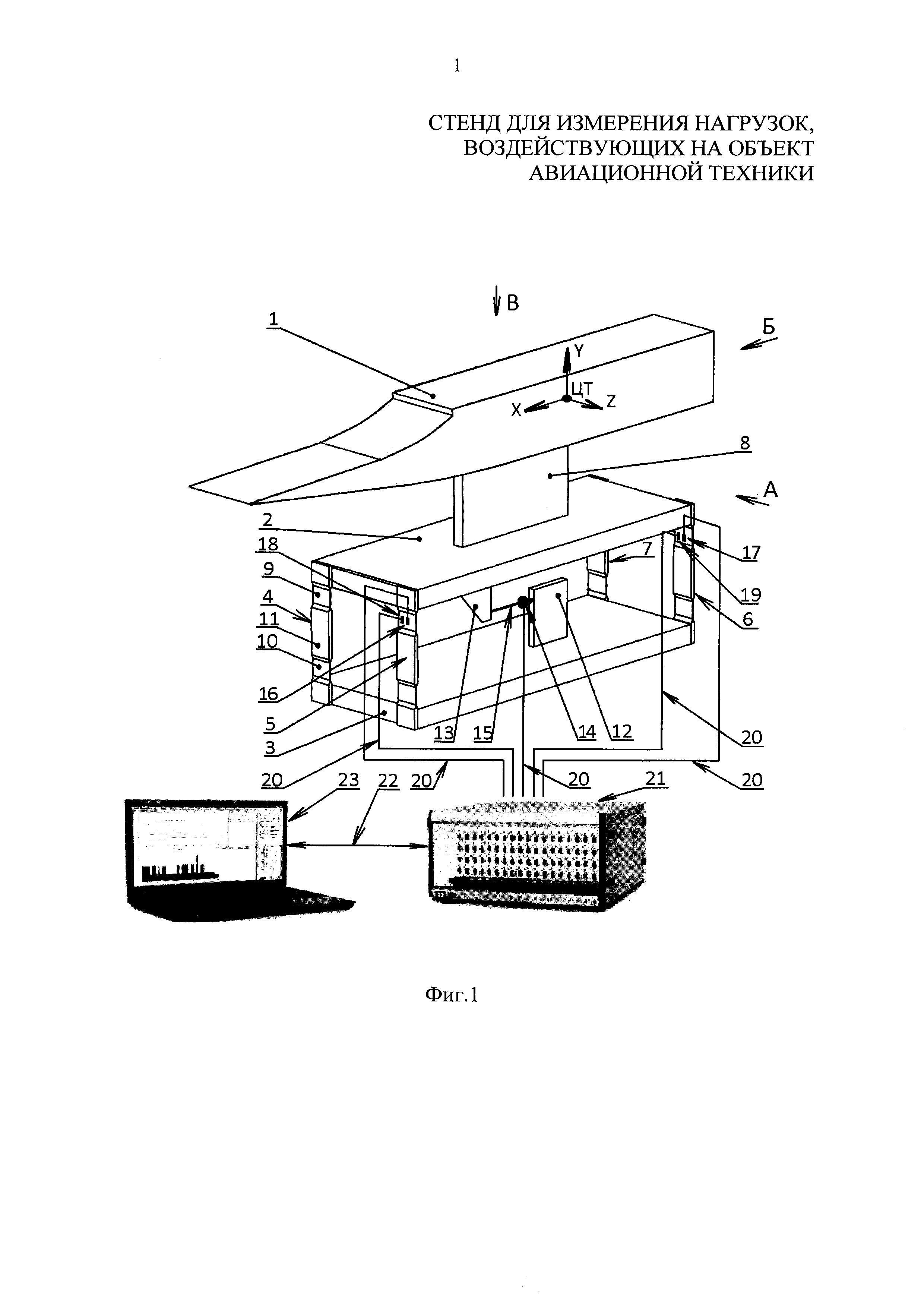
Гибридный ракетно-прямоточный воздушно-реактивный аэрокосмический двигатель
Прямоточный воздушно-реактивный двигатель на твердом горючем и способ функционирования двигателя
Зубчатое колесо
Способ сжигания топливо-воздушной смеси и прямоточный воздушно-реактивный двигатель со спиновой детонационной волной
Стенд для циклических испытаний газодинамических подшипников
Способ конвертирования турбовального авиационного двигателя в наземную газотурбинную установку
Способ функционирования турбореактивного двухконтурного двигателя летательного аппарата с выносными вентиляторными модулями
Муфта составного ротора газогенератора газотурбинного двигателя
Насос-дозатор
Способ определения тяги в полете турбореактивного двухконтурного двигателя со смешением потоков
Способ определения форм колебаний вращающихся колес турбомашин
Двигательная установка для гиперзвукового летательного аппарата
Аэродинамическая модель летательного аппарата с интегрированным воздушно-реактивным двигателем
Генератор высокоэнтальпийного потока воздуха и способ его работы
Способ изготовления пластин для теплообменников
Устройство газификации твердых углеводородов для прямоточного воздушно-реактивного двигателя
Пилон - автовоспламенитель топлива
Установка для газодинамических испытаний

