Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ АВИАЦИОННЫМИ БЕСПИЛОТНЫМИ СИСТЕМАМИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к области информационно-измерительной техники, а именно к автоматизированным системам управления и контроля. Способ относится к системам управления и контроля беспилотными авиационными системами для обеспечения безопасности их полета, но может быть применен и на других транспортных средствах.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широкое распространение получают различные системы и способы доставки товаров и грузов с помощью БАС (беспилотные авиационные системы).
Известна система навигации БАС, описанная в патенте США №8626361, опубликованном 25.11.2008. В известной системе первый БАС содержит данные, представляющие собой маршрут полета первого БАС и наземную станцию. Наземная станция принимает данные с БАС, представляющие собой маршрут полета первого БАС, рассчитывает маршрут полета для второго БАС, таким образом, чтобы траектории полета первого БАС и второго БАС не пересекались, и передает рассчитанный маршрут полета на второй БАС.
Известна система учета положения БАС, описанная в патенте США №8386175, опубликованном 18.03.2010. Известная система включает в себя систему отчетности управления воздушным движением (УВД) в сочетании с наземной станции управления (НСУ), УВД включает в себя систему автоматической трансляции наблюдения за БАС и информации о трафике услуг вещания, приемопередатчик и один или более телекоммуникационных модемов. НСУ выполнена с возможностью приема данных о позиции БАС в воздушном пространстве и сообщает позицию БАС в воздушном пространстве оператору УВД или в коммуникационный центр через приемопередатчик. УВД также может быть выполнен с возможностью отображения положения БАС в воздушном пространстве, на одном или более экранах.
Известна система управления БЛА, описанная в патенте США №8521339, опубликованном 08.04.2010. В известной системе организована удаленная связь между БАС и базовой станцией. БАС передает на базовую станцию свои координаты с привязкой к карте, базовая станция определяет вектора скорости для БАС и направляет БАС в соответствии с определенным вектором скорости до тех пор, пока БАС не достигнет цели.
Известна система безопасности полетов БАС в гражданском воздушном пространстве, описанная в патенте США №8838289, опубликованном 07.02.2008. Известная система включает в себя: наземную станцию, оснащенную системой технического зрения; БАС; удаленный оператор, управляющий наземной станцией; канал связи между БАС и наземной станцией; систему на борту БАС для обнаружения присутствия и положение вблизи воздушных судов и передачи этой информации удаленному оператору.
Из предшествующего уровня техники известен способ управления беспилотным летательным аппаратом и устройство для его реализации (см. патент RU №2390815, опубл. 27.05.2010 г.), характеризующий управление одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, при этом передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Типовая структура системы управления для БАС состоит из различных источников данных. Полученные данные попадают в блок бортовой системы управления (БАСУ), где производится оценка параметров движения объекта и выработка управляющих воздействий на исполнительные механизмы объекта. В качестве входных данных блок системы управления также может принимать внешние управляющие воздействия. Выработанные значения сигналов управления подаются на органы управления полетом БАС. В памяти БАСУ хранятся программы выполнения полета и конфигурации блока управления, изменяющиеся под воздействием определенных событий, происходящих на БАС в полете.
Недостатком известного способа управления беспилотным летательным аппаратом является то, что управление и контроль БАС осуществляется с наземного пункта управления в пределах радиовидимости. Это создает обстоятельства, которые снижают уровень безопасности полетов.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Данное техническое решение направлено на устранение недостатков, присущих существующим аналогам. Задачей заявляемого способа автоматизированного контроля и управления авиационными беспилотными системами является расширение зон управления БАС, в том числе и вне зоны радиовидимости, что повысит уровень обеспечения безопасности полетов на всех участках полета БАС.
Технический результат от использования данного технического решения заключается в улучшении управляемости БАС и повышении безопасности эксплуатирования БАС во время полетов.
Технический результат заявляемого способа обеспечивается за счет придание БАС функций «летающего» ретранслятора по принятию и передачи информации с БАС, находящегося в зоне его радиовидимости и последующей доставки этой информации в наземный пункт управления, с которого осуществляется контроль и управление данным БАС. Трафик сигнала связи может осуществляться через несколько БАС, а также другим доступным и разрешенным линиям связи и будет определяться загрузкой этих линий связи.
Способ автоматизированного контроля и управления авиационными беспилотными системами, которые оборудованы бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемопередающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, отличающийся тем, что всем наземным станциям управления и контроля за полетами БАС присваиваются идентификационные номера, которые передаются при передаче команд управления движением беспилотного летательного аппарата, передаче данных о координатах и параметрах его движения, а также передаче идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости с идентификационными номерами наземных станций управления и контроля за их полетом, причем в передаваемом сообщении с БАС указывается идентификационный номер наземной станции, которая осуществляет контроль и управление его полетом, который свидетельствует о необходимости ретрансляции полученного сообщения по этому адресу, а сформированный трафик сигнала связи служит каналом управления и контроля за полетом БАС, причем, когда трафик сигнала контроля и управления невозможно организовать, то БАС переходит в режим автономного полета, осуществляя прием сигналов оповещения от приближающихся БАС.
Общий канал с временным разделением может быть организован различными способами. Наиболее полно его достоинства проявляются в случае системы автоматического зависимого наблюдения (АЗН) в режиме радиовещания. Использование общего узкополосного радиоканала с временным разделением позволит существенно повысить помехозащищенность по сравнению с широкополосными ЛПД.
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
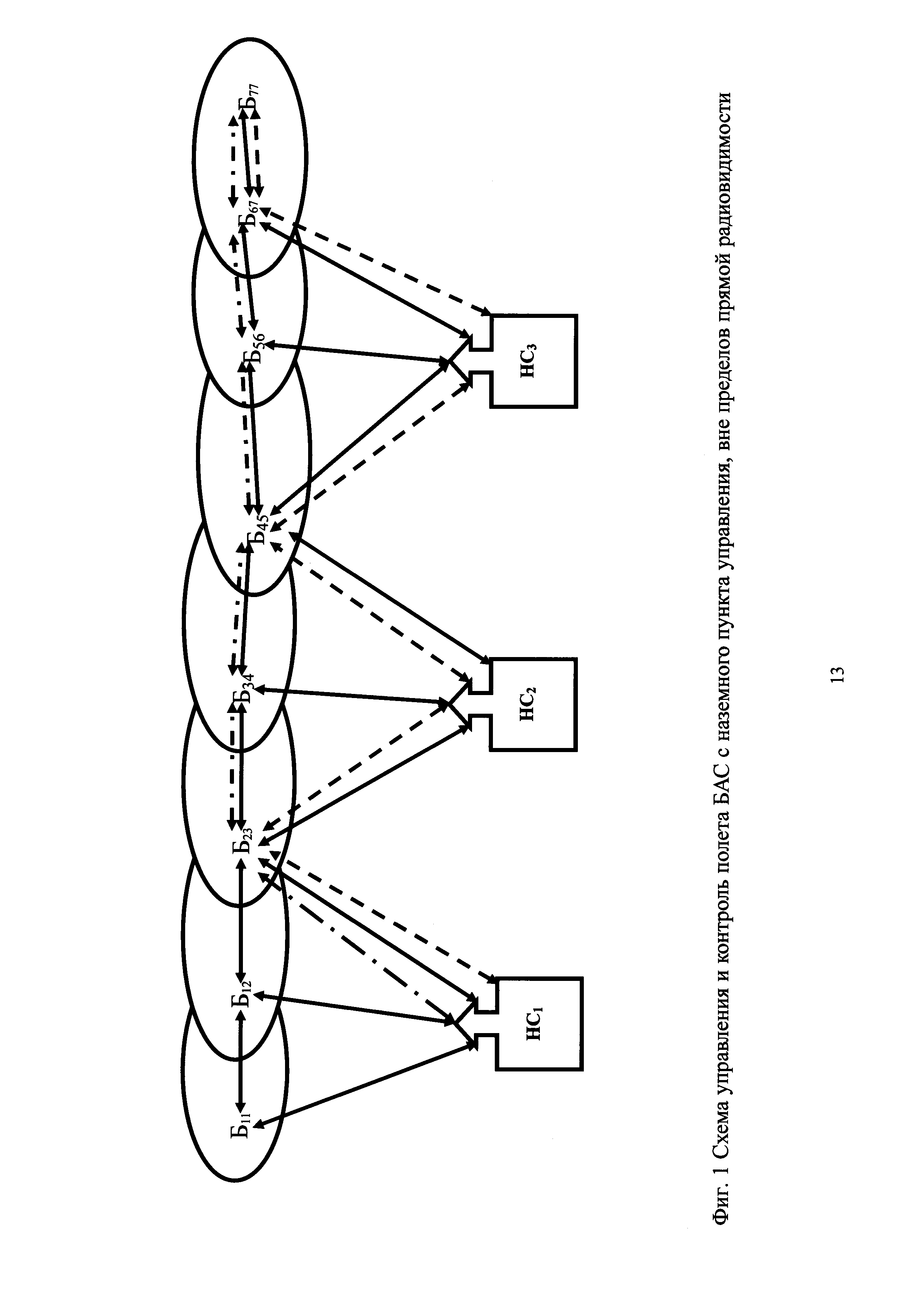
Фиг. 1 - схема управления и контроль полета БАС с наземного пункта управления, вне пределов прямой радиовидимости;
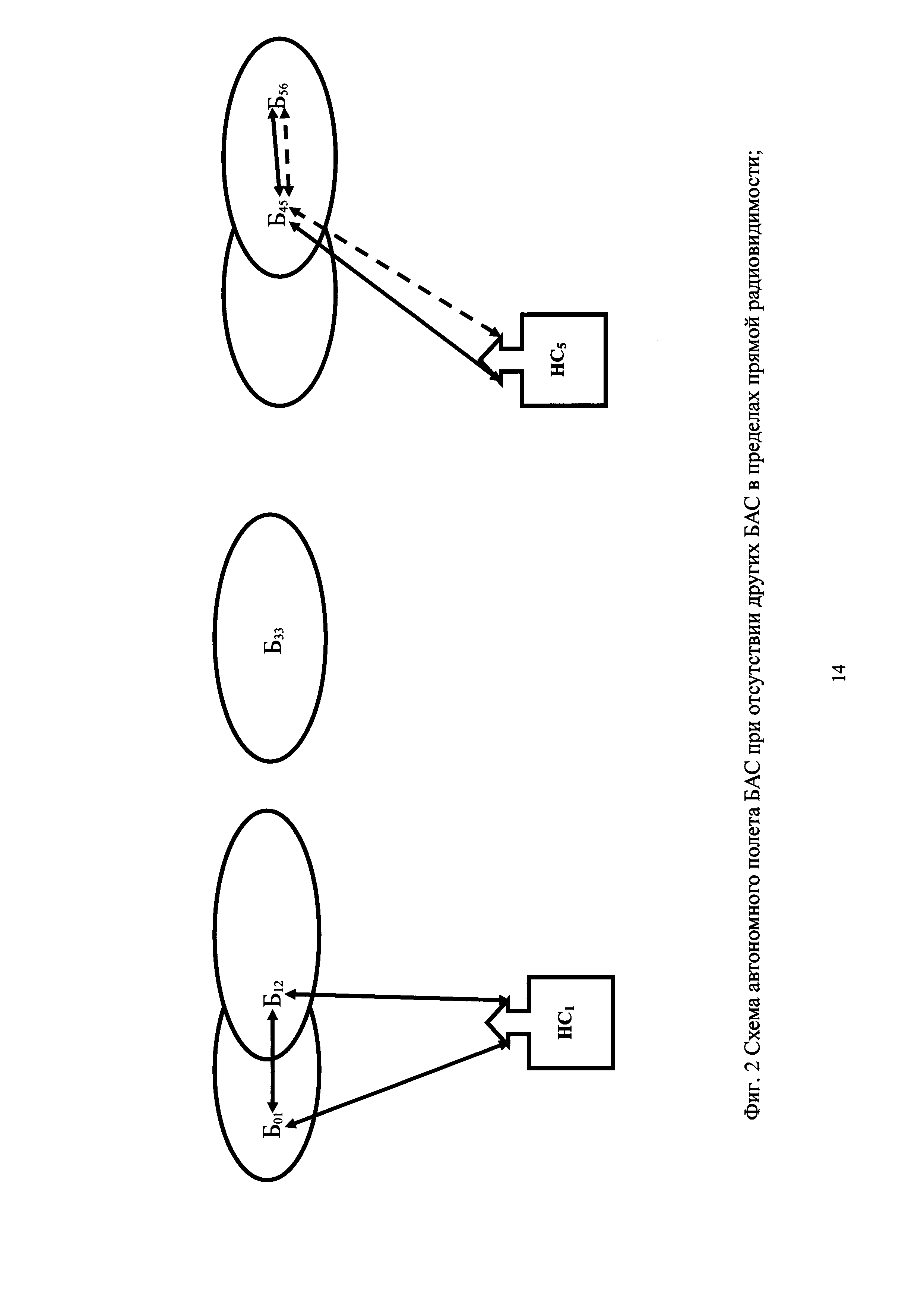
Фиг. 2 - схема автономного полета БАС при отсутствии других БАС в пределах прямой радиовидимости;
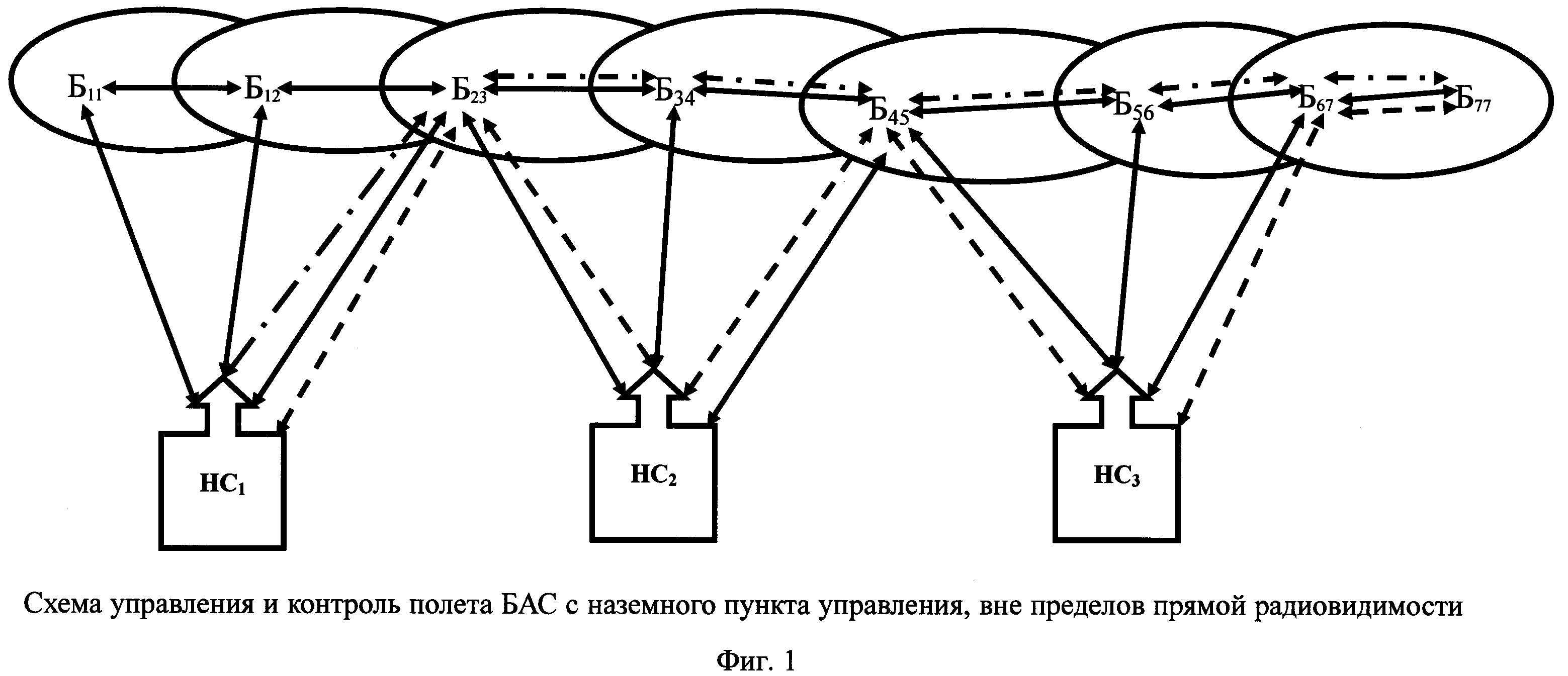
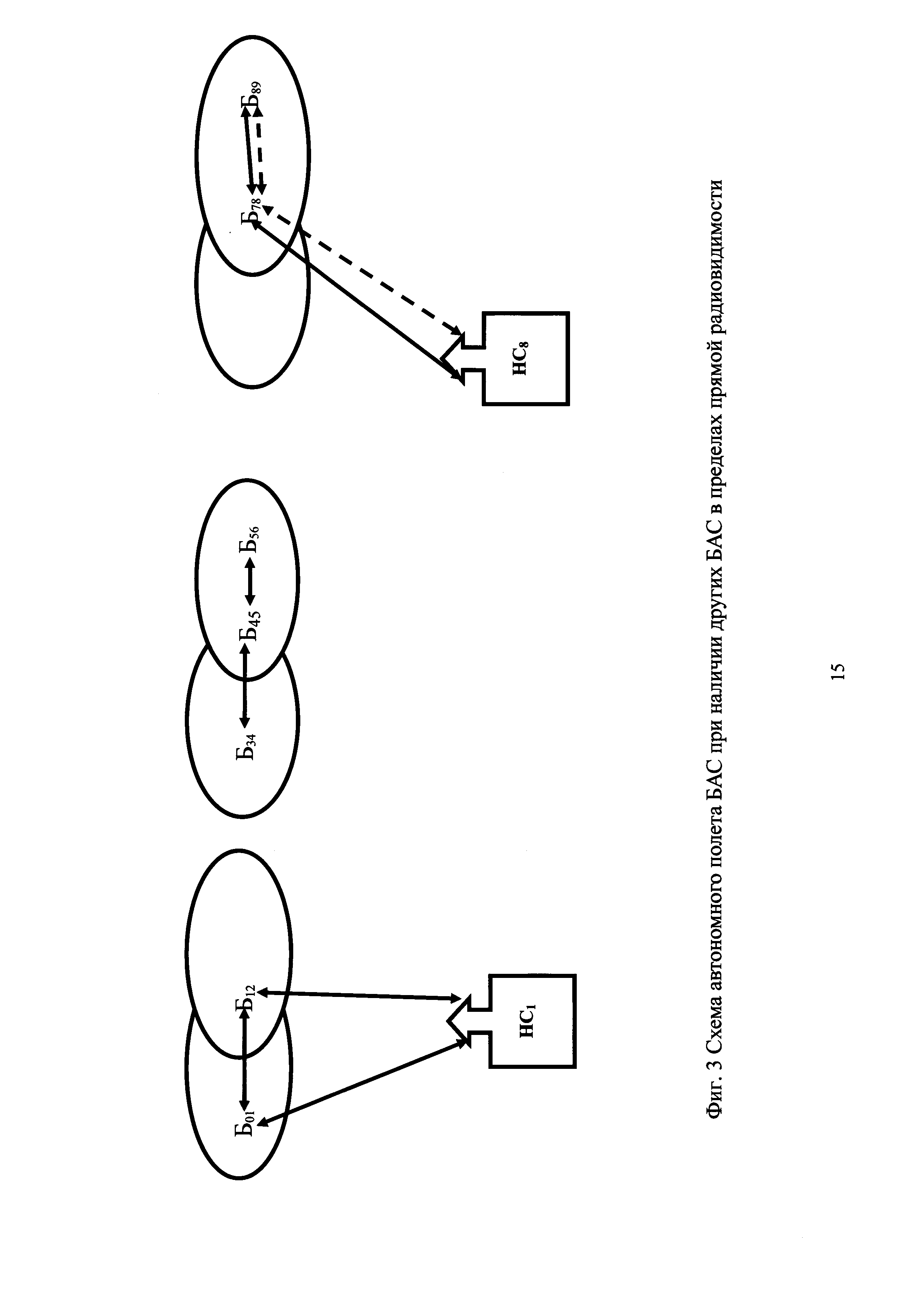
Фиг. 3 - схема автономного полета БАС при наличии других БАС в пределах прямой радиовидимости.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Данное техническое решение обеспечивает улучшение управляемости БАС и повышение безопасности эксплуатирования БАС во время полетов.
Технический результат заявляемого способа обеспечивается за счет придания БАС функций «летающего» ретранслятора по принятию и передачи информации с БАС, находящегося в зоне его радиовидимости и последующей доставки этой информации в наземный пункт управления, с которого осуществляется контроль и управление данным БАС. Трафик сигнала связи может осуществляться через несколько БАС, а также другим доступным и разрешенным линиям связи, и будет определяться загрузкой этих линий связи.
Поставленная цель достигается тем, что в известном способе управления беспилотными летательными аппаратами, которые оборудованы бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с пунктом управления, который оборудован автоматизированным рабочим местом оператора, который наделяется идентификационным номером, при этом передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем в передаваемом сообщении с БАС указывается идентификационный номер наземной станции, которая осуществляет контроль и управление его полетом, который свидетельствует о необходимости ретрансляции полученного сообщения по этому адресу, а сформированный трафик сигнала связи служит каналом управления и контроля за полетом БАС, причем, когда трафик сигнала контроля и управления невозможно организовать, то БАС переходит в режим автономного полета, осуществляя прием сигналов оповещения от приближающихся БАС, обеспечивая безопасность полета.
Общий канал с временным разделением может быть организован различными способами. Наиболее полно его достоинства проявляются в случае системы автоматического зависимого наблюдения (АЗН) в режиме радиовещания. Использование общего узкополосного радиоканала с временным разделением позволит существенно повысить помехозащищенность по сравнению с широкополосными ЛПД (линии передачи данных).
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
Заявленный способ поясняется чертежами, на которых показаны схемы осуществления контроля и управления БАС, реализующего заявленный способ.
Управление и контроль полета БАС с наземного пункта управления, даже вне пределов прямой радиовидимости, осуществляется следующим образом.
На Фиг. 1 показана схема управления и контроля полета БАС с наземного пункта управления, вне пределов прямой радиовидимости.
Наземную станция НС1 контролируют в зоне радиовидимости сектора, в которой находятся БАС - Б11, Б12, Б23.
Наземную станция НС2 контролируют в зоне радиовидимости сектора, в которой находятся БАС - Б23, Б34, Б45.
Наземную станция НС3 контролируют в зоне радиовидимости сектора, в которой находятся БАС - Б45, Б56, Б67.
БАС Б77 находится вне зон радиовидимости наземных станций НС1, НС2, НС3.
На схеме показаны два возможных трафика (пунктирный и штрихпунктирный) сигнала осуществления контроля наземной станцией НС1 беспилотника Б77, который находится вне зоны всех наземных станций.
На Фиг. 2 показана схема автономного полета БАС Б33, при отсутствии других БАС в пределах прямой радиовидимости и вне зоны всех наземных станций.
На Фиг. 3 показана схема автономного полета БАС Б34, Б45, Б56, которые находятся в пределах прямой радиовидимости, но вне зоны всех наземных станций.
Эти схемы наглядно показывают, как осуществляется управление и контроль полета БАС с наземного пункта управления, даже вне пределов прямой радиовидимости, обеспечивая безопасность полетов БАС, находящихся в зонах прямой радиовидимости, зонах отсутствия прямой видимости, а также в абсолютно свободных от полета зонах.
Специалисту в данной области очевидно, что конкретные варианты осуществления способа автоматизированного контроля и управления авиационными беспилотными системами были описаны здесь в целях иллюстрации, допустимы различные модификации, не выходящие за рамки и сущности объема технического решения.
Плавающий транспортер
Способ технического обслуживания и текущего ремонта подвижного состава железнодорожного транспорта
Уровнемер-расходомер жидкости в баке
Способ многопараметрического автоматизированного контроля технического состояния беспилотных транспортных средств
Способ комплексного управления эксплуатацией беспилотного воздушного судна с использованием информационных технологий
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна в общем воздушном пространстве для обеспечения безопасного полета с выявлением случаев несанкционированного изменения трафика полета
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве, объединяющий все этапы жизненного цикла
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна в общем воздушном пространстве для обеспечения безопасного санкционированного трафика полета
Способ автоматизированного контроля и управления полетами беспилотных авиационных систем в общем воздушном пространстве
Логическая архитектура комплексной автоматизированной системы контроля и управления беспилотными авиационными системами, обеспечивающая их безопасную интеграцию в общее воздушное пространство
Плавающий транспортер
Способ технического обслуживания и текущего ремонта подвижного состава железнодорожного транспорта
Уровнемер-расходомер жидкости в баке
Способ многопараметрического автоматизированного контроля технического состояния беспилотных транспортных средств
Способ комплексного управления эксплуатацией беспилотного воздушного судна с использованием информационных технологий
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна в общем воздушном пространстве для обеспечения безопасного полета с выявлением случаев несанкционированного изменения трафика полета
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве, объединяющий все этапы жизненного цикла
Способ автоматизированного управления эксплуатацией беспилотного воздушного судна в общем воздушном пространстве для обеспечения безопасного санкционированного трафика полета
Сцепное устройство для многозвенного транспортёра
Способ автоматизированного контроля и управления полетами беспилотных авиационных систем в общем воздушном пространстве

