Результат интеллектуальной деятельности: Самонастраивающийся электропривод манипулятора
Вид РИД
Изобретение
Изобретение относится к робототехнике и может быть использовано при создании приводов роботов.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый блок умножения, первый сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, а выходом через третий сумматор – к первому входу первого блока умножения, последовательно соединенные источник постоянного сигнала, четвертый сумматор, второй блок умножения и пятый сумматор, последовательно соединенные датчик массы и шестой сумматор, выход которого подключен ко второму входу первого блока умножения, причем выход датчика скорости подключен ко входу релейного элемента и вторым входам третьего и пятого сумматоров, третий вход пятого сумматора подключен к выходу релейного элемента, а его выход – ко второму входу первого сумматора, последовательно соединенные синусный функциональный преобразователь, третий блок умножения, второй вход которого подключен к выходу первого датчика ускорения, и седьмой сумматор, выход которого подключен ко второму входу второго блока умножения, последовательно соединенные косинусный функциональный преобразователь, вход которого соединен со входом синусного функционального преобразователя и выходом датчика положения, и четвертый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, а выход – ко второму входу седьмого сумматора, причем вторые входы четвертого и шестого сумматоров подключены, соответственно, к выходам датчика массы и источника постоянного сигнала (см. патент РФ №2212329, БИ № 26, 2003 г.).
Недостатком этого устройства является то, что оно эффективно только для конкретной степени подвижности манипулятора, имеющего вращающуюся степень подвижности. Поэтому рассматриваемое устройство не обеспечит высокую динамическую точность управления приводу манипулятора, имеющего вращательную степень подвижности.
Известно также устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор – с шестерней, приводящей в движение рейку, закрепленную неподвижно на основании робота, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и входу первого сумматора, третий вход – к выходу второго блока умножения, а выход – ко второму входу второго сумматора, третий вход которого подключен к выходу первого сумматора, последовательно соединенные первый датчик положения и четвертый сумматор, второй вход которого подключен ко входу устройства, а выход – ко второму входу первого сумматора, последовательно соединенные второй датчик скорости, квадратор и третий блок умножения, последовательно соединенные датчик массы и пятый сумматор, второй вход которого соединен с выходом источника постоянного сигнала, а выход – с первым входом второго блока умножения, причем выход датчика массы соединен со вторым входом первого блока умножения, последовательно соединенные второй датчик положения, синусный функциональный преобразователь, четвертый блок умножения, второй вход которого подключен к выходу датчика ускорения, и шестой сумматор, второй вход которого соединен с выходом третьего блока умножения, а выход – со вторым входом второго блока умножения, причем второй вход третьего блока умножения через косинусный функциональный преобразователь подключен к выходу второго датчика положения (см. патент РФ № 2212330, БИ № 26, 2003 г.).
Это устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Но в нем перемещение основания манипулятора в необходимом направлении в горизонтальной плоскости обеспечивается сразу двумя степенями подвижности (двумя приводами), что усложняет и утяжеляет манипулятор в целом. Особо вся конструкция усложняется, если основание манипулятора в процессе выполнения рабочих операций требуется перемещать на большие расстояния, когда этот манипулятор целесообразно просто устанавливать на компактное мобильное основание.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств произвольного линейного перемещения манипулятора в горизонтальной плоскости к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при одновременном движении по всем рассматриваемым степеням подвижности и тем самым повышение его динамической точности управления.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании нового сигнала управления, подаваемого на вход привода горизонтальной степени подвижности манипулятора, который обеспечивает получение нового моментного воздействия, компенсирующего вредное моментное воздействие со стороны другой степени подвижности на качественные показатели работы рассматриваемого привода.
Поставленная задача решается тем, что в самонастраивающийся электропривод манипулятора, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор – с первым датчиком положения, измеряющим линейные перемещения манипулятора в горизонтальной плоскости, выход которого через третий сумматор, второй вход которого соединен со входом устройства, подключен к первому входу первого сумматора, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и второму входу первого сумматора, последовательно соединенные задатчик постоянного сигнала, четвертый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом первого блока умножения, а выход через второй блок умножения – c третьим входом третьего сумматора, выход которого подключен ко второму входу второго сумматора, третий вход которого соединен с выходом первого сумматора, последовательно соединенные второй датчик скорости, установленный в первой степени подвижности манипулятора, квадратор, третий блок умножения и пятый сумматор, выход которого подключен ко второму входу второго блока умножения, а второй вход – к выходом четвертого блока умножения, первый вход которого подключен к выходу датчика ускорения, установленного в первой степени подвижности манипулятора, а второй – к выходу синусного функционального преобразователя, вход которого через косинусный функциональный преобразователь подключен ко второму входу третьего блока умножения, и второй датчик положения, установленный в первой степени подвижности манипулятора, дополнительно вводятся последовательно соединенные источник сигнала углового положения и шестой сумматор, второй вход которого подключен к выходу второго датчика положения, а выход – к входу синусного функционального преобразователя.
Сопоставительный анализ существенных признаков предлагаемого технического решения и существенных признаков аналога и прототипа свидетельствует о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают простоту конструкции манипулятора, а также высокую точность и устойчивость работы рассматриваемого электропривода в условиях существенного изменения параметров его нагрузки.
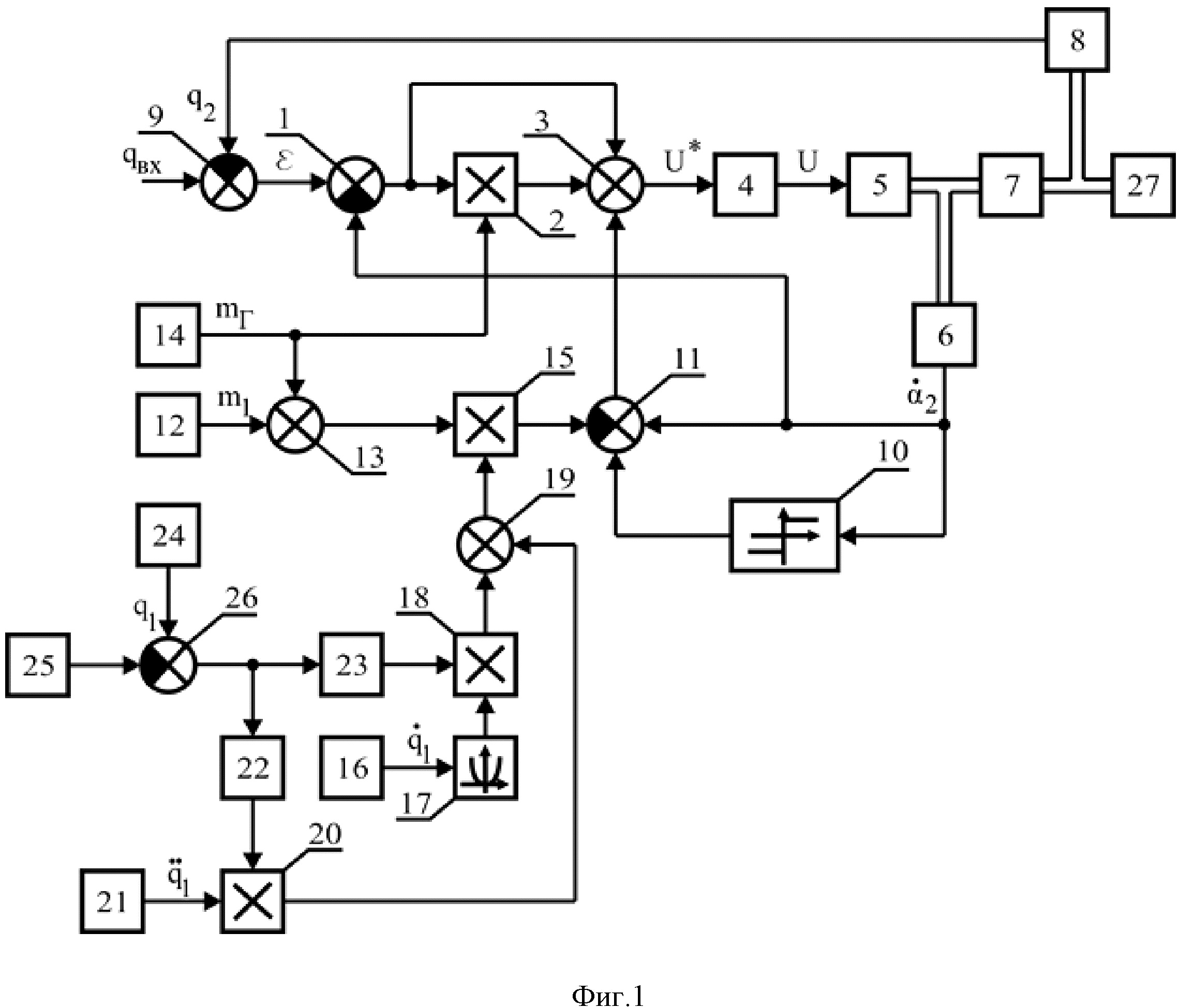
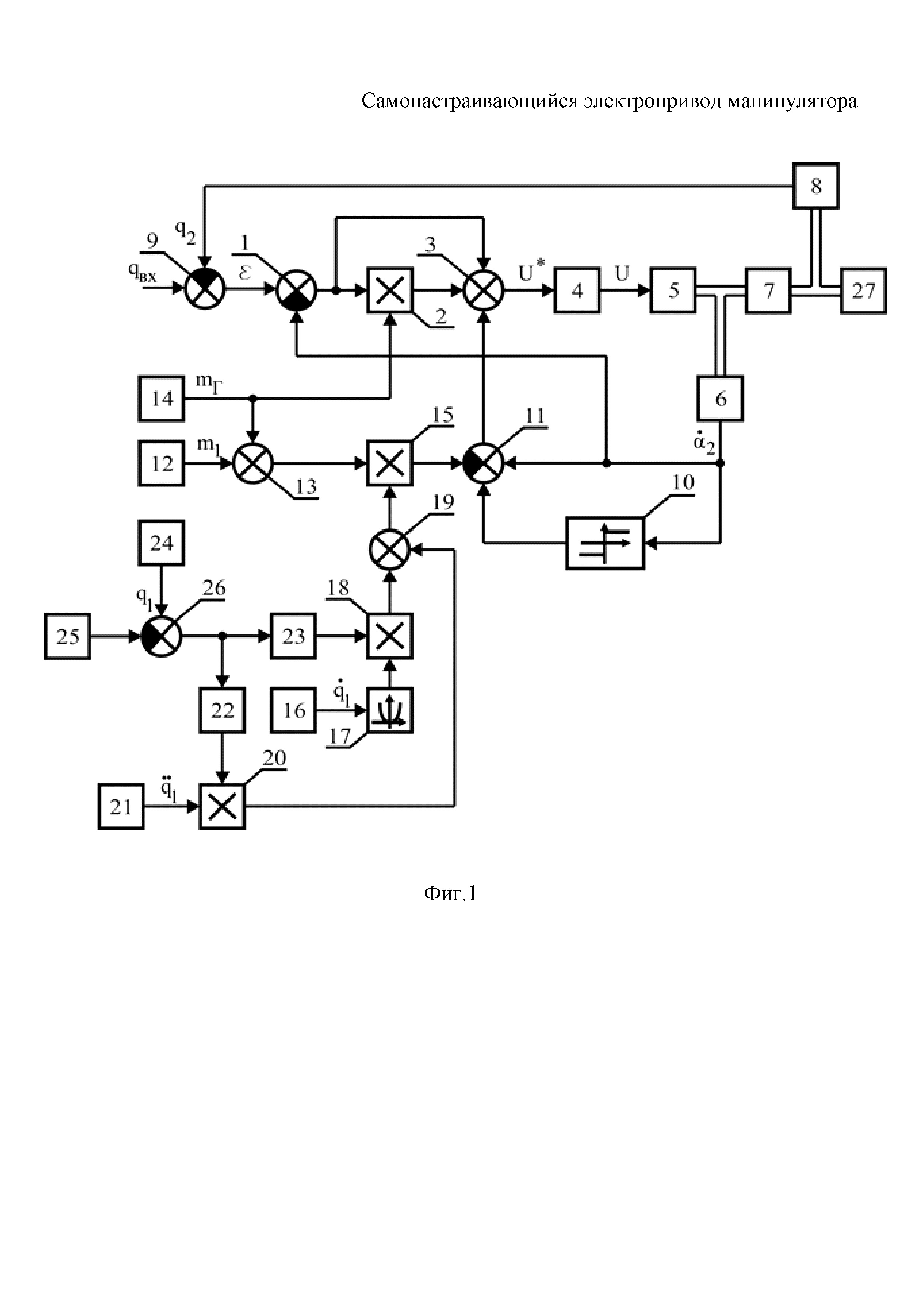
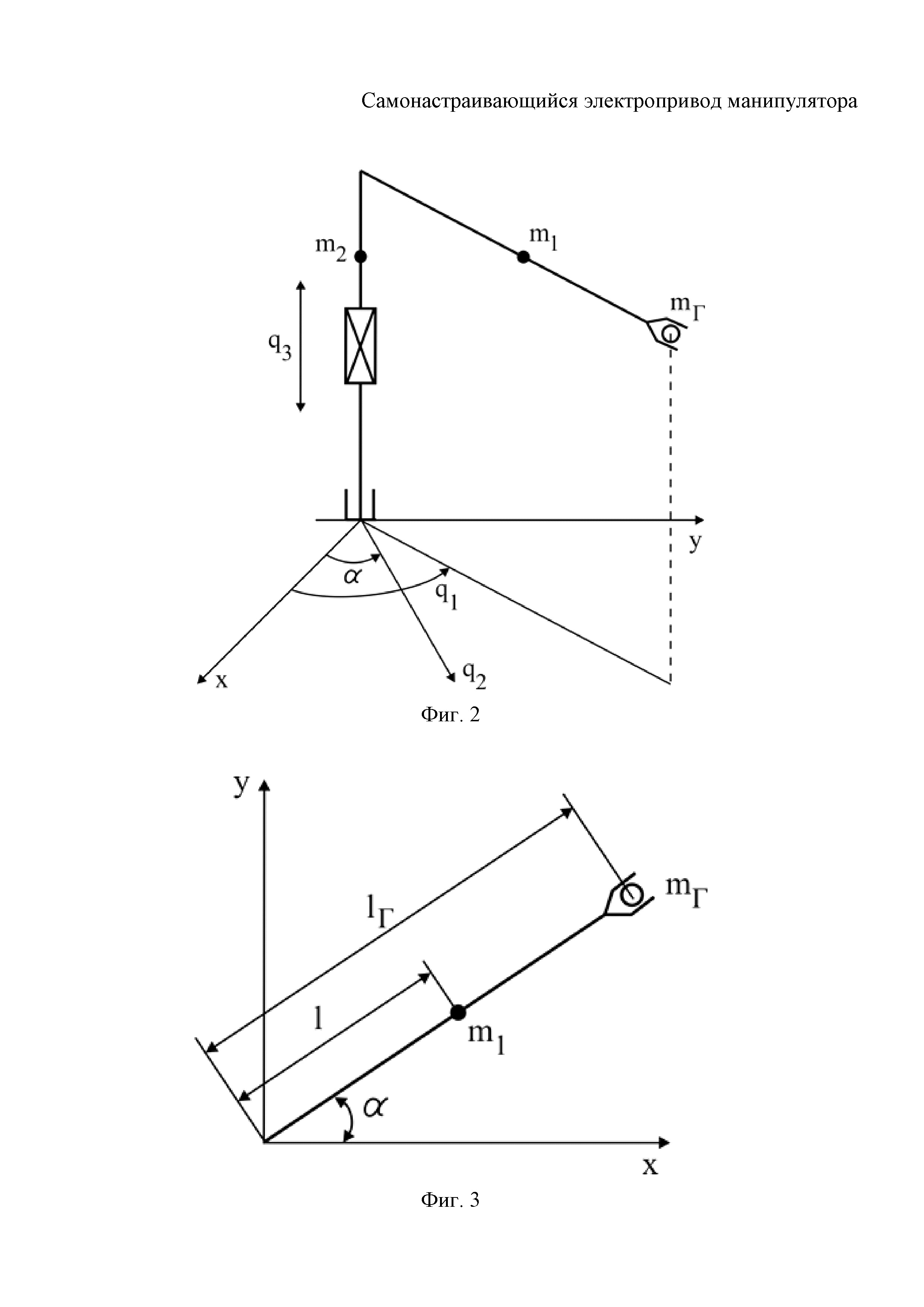
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 – кинематическая схема манипулятора; а на фиг. 3 – вид кинематической схемы манипулятора сверху.
Самонастраивающийся электропривод манипулятора содержит последовательно соединенные первый сумматор 1, первый блок 2 умножения, второй сумматор 3, усилитель 4 и двигатель 5, связанный с первым датчиком скорости 6 непосредственно и через редуктор 7 – с первым датчиком 8 положения, измеряющим линейные перемещения манипулятора в горизонтальной плоскости, выход которого через третий сумматор 9, второй вход которого соединен со входом устройства, подключен к первому входу первого сумматора 1, последовательно соединенные релейный блок 10 и третий сумматор 11, второй вход которого подключен к выходу первого датчика 6 скорости, входу релейного блока 10 и второму входу первого сумматора 1, последовательно соединенные задатчик 12 постоянного сигнала, четвертый сумматор 13, второй вход которого соединен с выходом датчика 14 массы и вторым входом первого блока 2 умножения, а выход через второй блок 15 умножения – c третьим входом третьего сумматора 11, выход которого подключен ко второму входу второго сумматора 3, третий вход которого соединен с выходом первого сумматора 1, последовательно соединенные второй датчик 16 скорости, установленный в первой степени подвижности манипулятора, квадратор 17, третий блок 18 умножения и пятый сумматор 19, выход которого подключен ко второму входу второго блока 15 умножения, а второй вход – к выходом четвертого блока 20 умножения, первый вход которого подключен к выходу датчика 21 ускорения, установленного в первой степени подвижности манипулятора, а второй – к выходу синусного функционального преобразователя 22, вход которого через косинусный функциональный преобразователь 23 подключен ко второму входу третьего блока 18 умножения, и второй датчик 24 положения, установленный в первой степени подвижности манипулятора, последовательно соединенные источник 25 сигнала углового положения и шестой сумматор 26, второй вход которого подключен к выходу второго датчика 24 положения, а выход – к входу синусного функционального преобразователя 22. Объект управления 27.
Рассматриваемый электропривод управляет линейным перемещением в горизонтальной плоскости вертикальной стойки манипулятора (обобщенная координата  ). Конструкция манипулятора позволяет осуществлять еще поворот вертикального звена (обобщенная координата
). Конструкция манипулятора позволяет осуществлять еще поворот вертикального звена (обобщенная координата  ) и вертикальное прямолинейное перемещение (обобщенная координата
) и вертикальное прямолинейное перемещение (обобщенная координата  ). Три ориентирующие степени подвижности манипулятора (вблизи его схвата) ввиду их малого влияния на координату
). Три ориентирующие степени подвижности манипулятора (вблизи его схвата) ввиду их малого влияния на координату  не рассматриваются.
не рассматриваются.
На чертежах введены следующие обозначения:  – сигнал желаемого значения координаты
– сигнал желаемого значения координаты  ;
; – ошибка электропривода;
– ошибка электропривода; – скорость и ускорение первой обобщенной координаты;
– скорость и ускорение первой обобщенной координаты;  – массы соответствующих звеньев манипулятора и захваченного груза;
– массы соответствующих звеньев манипулятора и захваченного груза;  = const – расстояние от оси вращения горизонтального звена до его центра масс;
= const – расстояние от оси вращения горизонтального звена до его центра масс;  – расстояние от оси вращения горизонтального звена до груза;
– расстояние от оси вращения горизонтального звена до груза;  – скорость вращения ротора двигателя второй степени подвижности;
– скорость вращения ротора двигателя второй степени подвижности;  – соответственно, усиливаемый сигнал и сигнал управления электродвигателем 5;
– соответственно, усиливаемый сигнал и сигнал управления электродвигателем 5;  – текущее значение угла, который очередная прямолинейная траектория движения манипулятора по координате
– текущее значение угла, который очередная прямолинейная траектория движения манипулятора по координате  составляет с осью Х.
составляет с осью Х.
В процессе перемещения манипулятора в горизонтальной плоскости на электропривод, управляющий его координатой  , действует момент
, действует момент
 (1)
(1)
где  , (2)
, (2)
где r – радиус передачи, преобразующей вращательное движение выходного вала электропривода в поступательное движение манипулятора по координате в горизонтальной плоскости.
С учетом соотношений (1) и (2), а также уравнений электрической  и механической
и механической 
 цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, рассматриваемый электропривод манипулятора описывается следующим дифференциальным уравнением:
цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, рассматриваемый электропривод манипулятора описывается следующим дифференциальным уравнением:
 (3)
(3)
где R – активное сопротивление якорной цепи электродвигателя 5; J – момент инерции якоря двигателя и вращающихся частей редуктора, приведенных к валу электродвигателя; kм – коэффициент крутящего момента;  – коэффициент противоЭДС; kв – коэффициент вязкого трения; ip – передаточное отношение редуктора; Мстр – момент сухого трения; kу – коэффициент усиления усилителя 4;
– коэффициент противоЭДС; kв – коэффициент вязкого трения; ip – передаточное отношение редуктора; Мстр – момент сухого трения; kу – коэффициент усиления усилителя 4;  – ток якоря электродвигателя 5;
– ток якоря электродвигателя 5; 
Из уравнения (3) видно, что его параметры, а следовательно, параметры и динамические свойства электропривода, управляющего координатой  , являются существенно переменными, зависящими от
, являются существенно переменными, зависящими от  и
и  . В результате для реализации поставленной выше задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры электропривода таким образом, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
. В результате для реализации поставленной выше задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры электропривода таким образом, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Устройство работает следующим образом. Полагается, что при одном рабочем цикле при движении манипулятора по оси он будет способен выполнить все рабочие операции со всеми объектами работ, которые в некотором ограниченном коридоре могут располагаться по обе стороны от этой оси.
Первый положительный вход сумматора 1 (со стороны сумматора 9) имеет единичный коэффициент усиления, а его второй отрицательный вход – коэффициент усиления  . В результате на выходе сумматора 1 формируется сигнал
. В результате на выходе сумматора 1 формируется сигнал  .
.
Источник 12 формирует сигнал  и подает его на первый положительный вход сумматора 13, который имеет коэффициент усиления
и подает его на первый положительный вход сумматора 13, который имеет коэффициент усиления  . Его второй положительный вход имеет коэффициент усиления, равный
. Его второй положительный вход имеет коэффициент усиления, равный  . В результате на выходе сумматора 13 формируется сигнал
. В результате на выходе сумматора 13 формируется сигнал  .
.
Сумматор 26 имеет единичные коэффициенты усиления. Источник 25 (датчик угла или гироскоп) формирует сигнал угла  , который подается на первый отрицательный вход этого сумматора 26, а на его второй положительный вход подается сигнал q1. На выходе блока 20 формируется сигнал
, который подается на первый отрицательный вход этого сумматора 26, а на его второй положительный вход подается сигнал q1. На выходе блока 20 формируется сигнал  , на выходе блока 18 – сигнал
, на выходе блока 18 – сигнал  , а на выходе сумматора 19, имеющего положительные входы с единичными коэффициентами усиления – сигнал +.
, а на выходе сумматора 19, имеющего положительные входы с единичными коэффициентами усиления – сигнал +.
Выходной сигнал релейного элемента 10 имеет вид
 ,
,
где  – величина момента сухого трения при движении.
– величина момента сухого трения при движении.
Первый (со стороны релейного элемента 10) положительный и третий (со стороны блока 15) отрицательный входы сумматора 11 имеют единичные коэффициенты усиления, а его второй положительный вход – коэффициент усиления  . В результате на выходе сумматора 11 формируется сигнал
. В результате на выходе сумматора 11 формируется сигнал
 .
.
Все входы сумматора 3 положительные. Его первый вход (со стороны блока 2) имеет коэффициент усиления  (где
(где  – номинальное значение момента инерции, приведенного к валу электродвигателя 5), второй (со стороны сумматора 11) – коэффициент усиления, равный
– номинальное значение момента инерции, приведенного к валу электродвигателя 5), второй (со стороны сумматора 11) – коэффициент усиления, равный  , а третий – коэффициент усиления
, а третий – коэффициент усиления  .
.
В результате на выходе сумматора 3 формируется сигнал  (4)
(4)
Несложно показать, что поскольку при работе электропривода  достаточно точно соответствует Мстр, то, подставив полученное значение
достаточно точно соответствует Мстр, то, подставив полученное значение  (4) в соотношение (3), получим уравнение
(4) в соотношение (3), получим уравнение
 , (5)
, (5)
которое имеет постоянные желаемые параметры. То есть рассматриваемый электропривод, управляющий координатой  , будет обладать постоянными желаемыми динамическими свойствами и качественными показателями, которые определяются выбором желаемых значений
, будет обладать постоянными желаемыми динамическими свойствами и качественными показателями, которые определяются выбором желаемых значений  .
.
Биомедицинский клеточный препарат
Соус майонезный
Лакокрасочное покрытие
Состав для производства хлебобулочных изделий
Состав для производства хлебобулочных изделий
Способ оценки формы измеренной поверхности
Концентратор тяжелых минералов из сыпучего материала
Способ приготовления десертного продукта
Способ нагружения корпуса судна при проведении испытаний
Способ получения красителя
Способ автоматической обработки крупногабаритных тонкостенных изделий
Способ обработки легкодеформируемых изделий
Способ управления манипулятором
Самонастраивающийся электропривод
Самонастраивающийся электропривод
Самонастраивающийся электропривод манипулятора
Самонастраивающийся электропривод манипуляционного робота
Способ управления манипулятором
Устройство для управления приводом робота
Система коррекции траектории движения манипулятора

