Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ОЦЕНКИ ВРЕМЕНИ ПРОХОЖДЕНИЯ ИОНОСФЕРЫ
Вид РИД
Изобретение
Настоящее изобретение относится к области способов определения погрешности оценки времени распространения сигнала (также известное как расстояние пути) между спутником и наземной станцией или спутниковым терминалом. Это время распространения вычисляют вдоль оси, проходящей от спутника до наземной станции или спутникового терминала. Эта ось также называется линией видимости или осью видимости.
В системах спутникового позиционирования, обычно называемых по их англосаксонскому акрониму GNSS, Global Navigation Satellite System (Глобальная Навигационная Спутниковая Система), стационарный или мобильный спутниковый терминал, такой как транспортное средство или летательный аппарат, локализуется трилатерацией (Трилатерация - математический метод, позволяющий определить относительное положение точки, используя геометрию треугольников точно также, как триангуляция. Но, в отличие от последней, которая использует углы и расстояния для определения положения точки, трилатерация использует расстояния между минимум двумя опорными точками), посредством вычисления расстояний, отделяющих его от нескольких спутников. Точность вычисления расстояния между спутниковым терминалом или наземной станцией и каждым из спутников является определяющей для получения точного позиционирования. Основной источник погрешности при оценке этого расстояния - задержка, накопленная сигналом, когда он проходит ионосферу, где частичная ионизация газов на большой высоте создает помехи распространению сигнала и порождает переменное запаздывание передачи.
Поэтому, чтобы получить точное измерение позиционирования, необходимо иметь возможность располагать как оценкой времени пути между спутниками и наземной станцией или спутниковым терминалом, так и оценкой погрешности оценки времени пути. Это типичная ковариация сглаживания. Для этого известные системы GNSS могут быть дополнены системами, так называемой дифференциальной коррекции, которые в реальном времени выдают корректировки в зависимости от активности ионосферы. Эти системы также выдают индикаторы полноты, гарантирующие эти корректировки. Известны системы дифференциальной коррекции, основанные на спутниках, обычно называемые SBAS, что по-английски означает Satellite-Based Augmentation System (Спутниковая система дифференциальной коррекции). Это, к примеру, система EGNOS (по-английски European Geostationary Navigation Overlay Service (Европейская Геостационарная Служба Навигационного Покрытия), используемая в Европе, которая транслирует через многочисленные геостационарные спутники данные корректировки для наземных станций или спутниковых терминалов, использующих систему GPS (GPS по-английски означает Global Positioning System (Система Глобального Позиционирования)).
При известном подходе, обычно называемом по ее англосаксонскому акрониму моделью TRIN, TRiangular INterpolation (Триангулярная интерполяция), ионосфера уподоблена тонкому слою вокруг земного шара, в которой накапливается общий электрический заряд ионосферы. Этот слой моделируется линейной моделью, формируемой из правильного многогранника, центрированного на земле и имеющий тысяча двести восемьдесят треугольных граней.
Системы дифференциальной коррекции используют методы интерполяции для определения задержки распространения сигнала, проходящего через определенную точку проникновения. Точка проникновения - точка многогранника, расположенная на пересечении с осью видимости, проходящей через спутник и спутниковый терминал или наземную станцию. Точка проникновения обычно называется по ее англосаксонскому акрониму IPP, Ionosphere Pierce Point (Точка Пробития Ионосферы). Вычисления интерполяции реализованы исходя из знания запаздываний сигналов, проходящих через узлы многогранника вблизи рассматриваемой точки проникновения. В дополнение к оценке этой задержки распространения, реализована оценка неточности этой задержки.
Оценка вертикального полного электронного содержания, известного также под акронимом VTEC, по-английски “Vertical Total Electron Content” (Вертикальное Полное Электронное Содержание), позволяет составлять картографию ионосферных задержек в виде расположенной на высоте и привязанной к вращению земли сферической сетки, центрированной на земле. Узлы сетки названы по англосаксонскому акрониму IGP, Ionospheric Grid Point (Точка Ионосферной Сетки). Системы, известные под именем SBAS, передают пользователям вертикальные ионосферные задержки над точкой сетки, обычно называемой сетка IONO, также, как и информацию о надежности для вычисления ионосферной задержки на линиях видимости каждого рассматриваемого спутника, через линейную интерполяцию на этой сетке. Регулярное обновление значений сетки IONO, обычно каждые 30 секунд, транслируется системами, известными под именем SBAS, в расположение пользователей системы навигации.
Эта сетка IONO, которая доступна пользователям систем навигации, вычисляется линейной интерполяцией через модель TRIN в фиксированное солнечное время, когда пребывание на солнце каждого из узлов многогранника является постоянным.
Эта сетка IONO содержит информацию о вертикальных задержках, необходимую для того, чтобы пользователь мог восстановить оценку задержки, которой подвергается сигнал, во время прохождения ионосферного слоя. Способ известен и стандартизирован MOPS, по англосаксонскому акрониму Minimum Operational Performance Standard (Стандарт Минимальной Операционной Производительности). Зная вертикальную задержку GIVD, по англосаксонскому акрониму Grid Ionospheric Vertical Delay (Вертикальная Задержка Ионосферной Сетки), и связанную с ней погрешность, называемую GIVE, по англосаксонскому акрониму Grid Ionospheric Vertical Error (Вертикальная ионосферная погрешность в узлах ионосферной сетки), из 4 точек сетки IGP пользователь рассчитывает через линейную интерполяцию вертикальной задержки в точке прокалывания IPP оси видимости спутник-пользователь, также связанную погрешность UIVE по англосаксонскому акрониму User Ionospheric Vertical Error (Пользовательская Ионосферная Вертикальная Погрешность). Наконец пользователь применяет функцию совмещения (смоделированную и стандартизированную посредством MOPS) для перехода от задержек и вертикальных погрешностей в точке IPP к задержкам и погрешностям вдоль оси видимости в той же точке IPP.
Однако способы определения этой неточности, известные в области техники, не настолько точны для осуществления действенного контроля системы дифференциальной коррекции, основанной на спутниках.
Изобретение направленно на то, чтобы предложить альтернативное решение для оценки неточности задержки распространения между спутником и спутниковым терминалом или наземной станцией.
С этой целью изобретение относится к способу определения погрешности оценки времени прохождения ионосферы сигналом вдоль вертикальной оси видимости, вертикальной оси видимости, пронзающей ионосферу в интересующей точке, вертикальной оси видимости, являющейся осью, проходящей через приемник и интересующий спутник. Способ отличается тем, что он содержит первый этап определения по меньшей мере двух точек пронзания ионосферы двумя осями видимости между спутником и по меньшей мере двумя наземными станциями или одной наземной станцией и по меньшей мере двумя спутниками. Он содержит также второй этап определения по меньшей мере одного угла, образованного отрезком, идущим от интересующей точки к одной из упомянутых точек пронзания, и отрезком, идущим от интересующей точки к другой из упомянутых точек пронзания. Наконец, он содержит третий этап определения пространственного разброса упомянутых точек пронзания относительно упомянутой интересующей точки на основе упомянутого угла, посредством разности с предопределенным углом и получения среднего значения, упомянутой или упомянутых разностей. Способ также включает четвертый этап определения погрешности оценки времени прохождения ионосферы посредством добавления:
- первой погрешности оценки времени прохождения, зависящей от дисперсии, вычисленной интерполяцией на основе модели TRIN
- ко второй погрешности оценки времени прохождения, зависящей от упомянутого пространственного разброса.
Поэтому способ состоит в адаптивном вычислении оценки погрешности оценки вертикальной ионосферной задержки в каждой точке сетки IONO IGP в зависимости от локальной ионосферной информации, делая максимальной доступность услуги, обеспечивая целостность.
Четвертый этап определения преимущественно использует соотношение:
 ,
,
где GIVE - упомянутая погрешность оценки времени прохождения ионосферы,
TGIVE - упомянутая первая погрешность,
 является упомянутой второй погрешностью и состоит из:
является упомянутой второй погрешностью и состоит из:
 - упомянутый пространственный разброс,
- упомянутый пространственный разброс,
 - стандартное отклонение распределения Стьюдента с
- стандартное отклонение распределения Стьюдента с  степенями свободы
степенями свободы
- количество упомянутых точек пронзания, используемых для вычисления  ,
,
 является средним значением погрешности вычисления задержки прохождения ионосферы сигналом вдоль двух упомянутых осей видимости, и
является средним значением погрешности вычисления задержки прохождения ионосферы сигналом вдоль двух упомянутых осей видимости, и
 - коэффициент, позволяющий нормализовать .
- коэффициент, позволяющий нормализовать .
Точка, через которую ось видимости пронзает ионосферу, также называется интересующей точкой IGP сетки IONO трансляции. Точки пронзания, также называемые по своему английскому акрониму точкой прокалывания IPP, Ionospheric Pierce Point.
Точки пронзания располагаются в окрестности интересующей точки.
Таким образом, изобретение позволяет оценить неточность задержки распространения сигнала между спутником и спутниковым терминалом или наземной станцией через интерполяцию погрешностей, транслируемых сеткой IONO.
Этот способ преимущественно способствует дополнению мониторинга точек IGP сетки IONO и, таким образом, доступности услуги системы дифференциальной коррекции типа SBAS. На уровне пользователя этот процесс позволяет учитывать максимальное количество линий видимости при вычислении его точки, позволяя, таким образом, снизить погрешности его локализации, а также оценку этих погрешностей.
Способ преимущественно содержит четвертый этап определения первого расстояния между интересующей точкой и одной из точек пронзания и второго расстояния между интересующей точкой и другой из точек пронзания. Второй этап адаптирован для определения пространственного разброса на основе, дополнительно, первого и второго расстояний, путем сравнения с предопределенным расстоянием и получением среднего значения сравнения.
Способ преимущественно содержит пятый этап определения первого наклона первой оси видимости, связанной с одной из упомянутых точек пронзания относительно вертикальной оси, и второго наклона второй оси видимости, связанной с другой из упомянутых точек пронзания. К тому же второй этап адаптирован для определения пространственного разброса на основе, дополнительно, первого и второго наклонов.
Предопределенный угол преимущественно получают как угол, минимизирующий погрешность оценки времени прохождения.
Предопределенный угол преимущественно представляет собой  , где - количество точек пронзания ионосферы.
, где - количество точек пронзания ионосферы.
Предопределенное расстояние преимущественно получают как расстояние, минимизирующее погрешность оценки времени прохождения.
Изобретение также имеет объектом систему, включающую в себя спутник и по меньшей мере две наземные станции, осуществляющую способ определения погрешности оценки времени прохождения.
Изобретение станет более понятным, и другие преимущества предстанут при прочтении детального описания вариантов реализации, приведенных в качестве неограничивающих примеров на следующих фигурах.
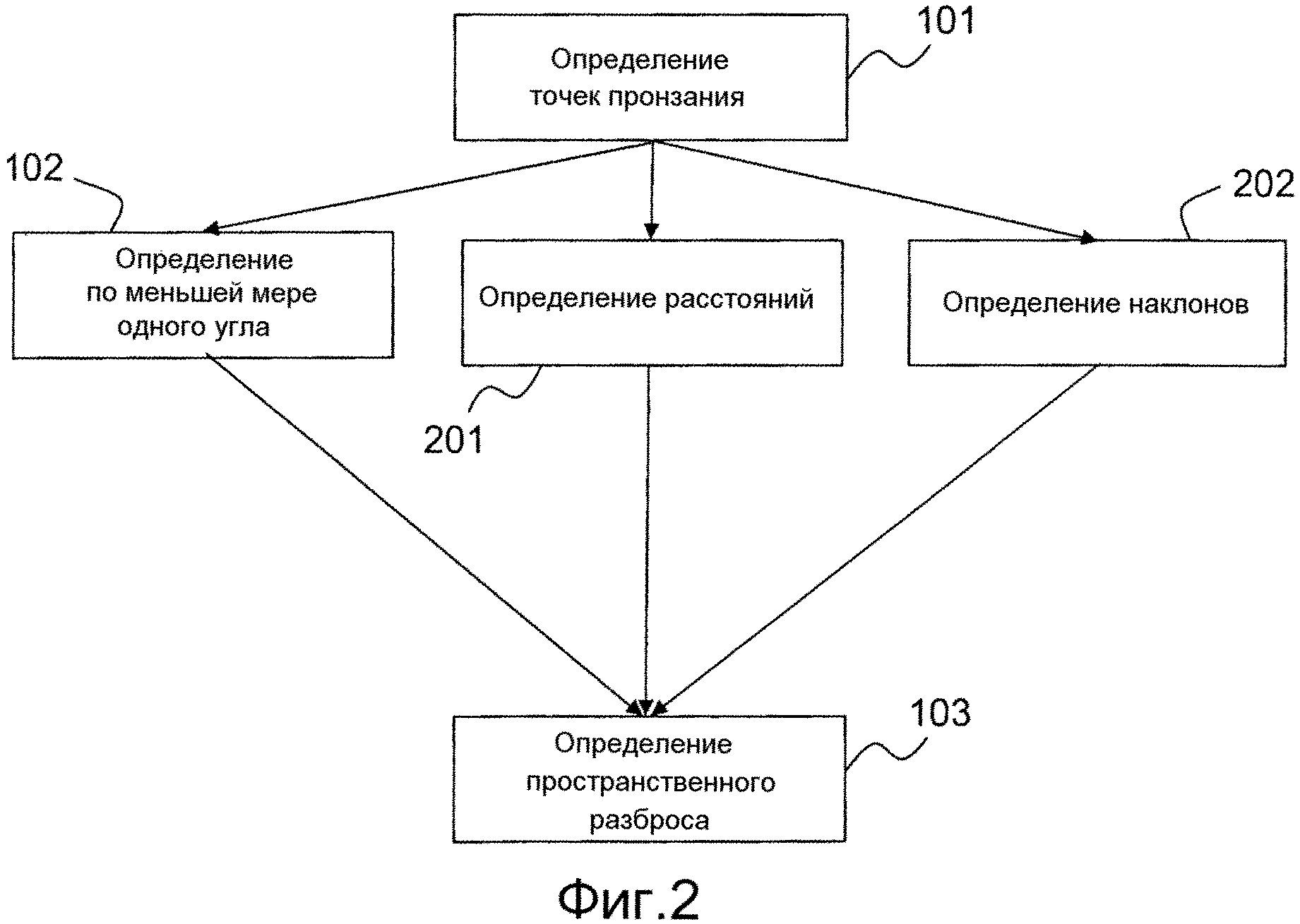
Фигура 1 представляет способ согласно аспекту изобретения.
Фигура 2 представляет способ согласно второму аспекту изобретения.
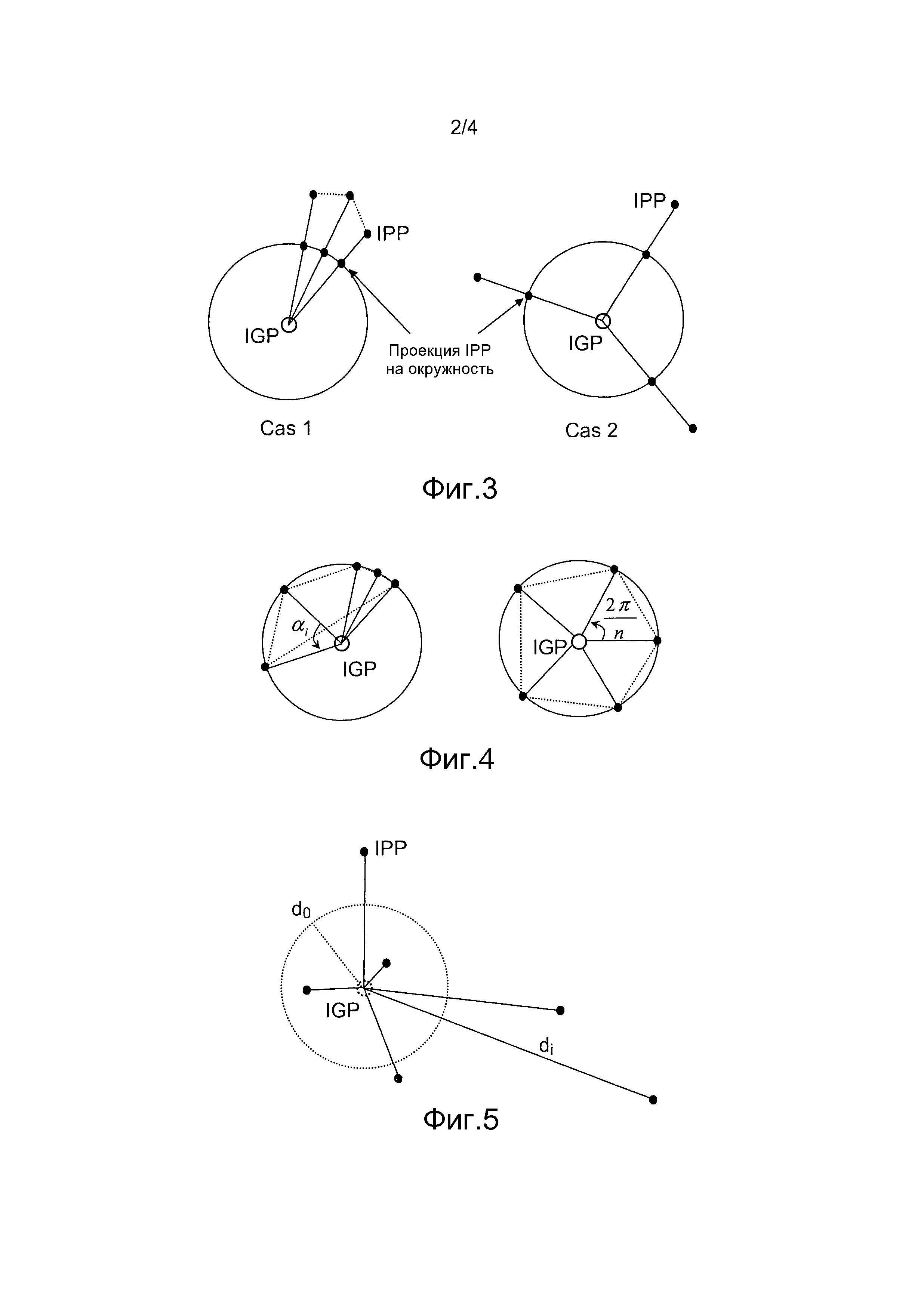
Фигура 3 представляет два примера проекции точек проникновения на окружность, содержащую идеальные точки.
Фигура 4 представляет слева пример проекции 5 точек проникновения и справа - пример пяти точек, соответствующих набору идеально распределенных точек.
Фигура 5 представляет расстояние  .
.
Фигура 6 представляет зону вокруг интересующей точки, разделенную на K смежных колец.
Фигура 7 представляет наклон осей видимости.
Фигура 8 представляет треугольную сетку.
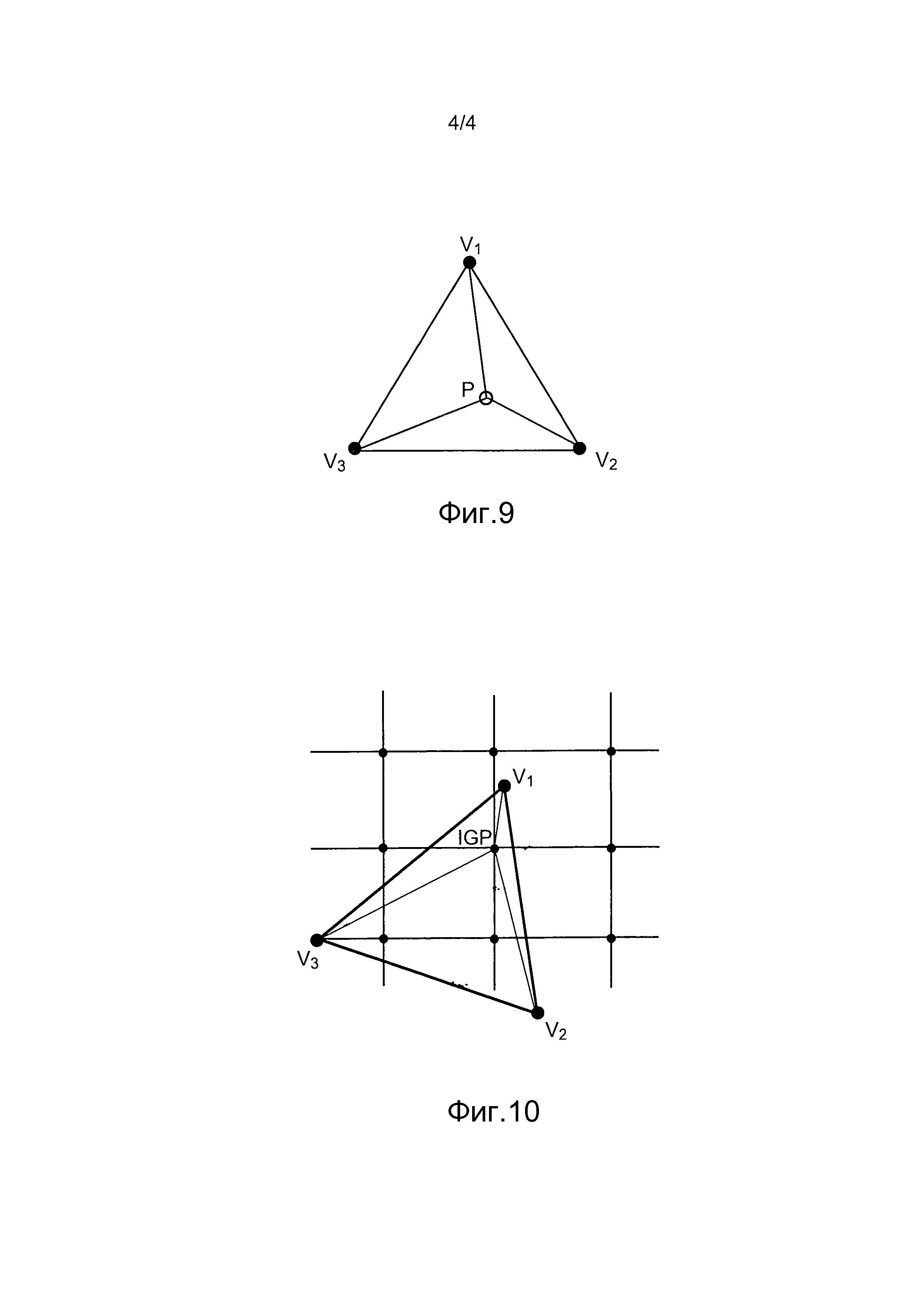
Фигура 9 представляет вариант реализации вычисления VTEC.
Фигура 10 представляет другой вариант реализации вычисления VTEC.
Способ согласно изобретению позволяет определить погрешность времени распространения сигнала, проходящего по вертикальной оси видимости и пронзающего ионосферу в точке, называемой интересующей точкой.
Способ такой, как представлен на фигуре 1, содержит первый этап 101 определения по меньшей мере двух точек пронзания ионосферы, смоделированной поверхностью многогранника, окружающего землю, и двух различных осей видимости. Эти оси видимости соединяют спутник и наземную станцию. Каждая из двух точек пронзания или проникновения соответственно связана со спутником и со спутниковым терминалом или наземной станцией. Каждая точка проникновения расположена на пересечении между осью видимости спутника и поверхностью многогранника. Спутник и/или наземная станция различаются для различных осей видимости. Далее, способ содержит второй этап 102 определения по меньшей мере одного угла, образованного отрезком, идущим из интересующей точки к одной из точек пронзания, и отрезком, идущим из интересующей точки к другой из точек пронзания. Наконец способ содержит третий этап 103 определения пространственного разброса упомянутых точек пронзания на основе упомянутого угла.
Известно, что оценку задержки распространения, связанной с точкой на поверхности многогранника, известной под названием IGP, получают посредством линейной интерполяции задержек распространения, связанных с различными точками проникновения(IPP). К тому же определяют идеально распределенные точки, в качестве точек поверхности многогранника, для которых эта линейная интерполяция минимизирует погрешность оценки задержки распространения, связанной с этой точкой. Геометрическое положение, реализующее минимальную погрешность интерполяции, определяется по трем типам параметров. Первый тип параметров - угол между различными точками проникновения и идеальными точками. Второй тип параметров - расстояние между различными точками проникновения и идеальными точками. Третий тип параметров - возвышение (возвышение определяется как угол между осью видимости и вертикалью) линий видимости различных точек проникновения и сравнение с вертикальным возвышением.
Способ, представленный на фигуре 2, представляет, кроме того, четвертый этап 201 определения первого расстояния между интересующей точкой и одной из точек пронзания и второго расстояния между интересующей точкой и другой из точек пронзания. Способ, который представлен на фигуре 2, представляет также пятый этап 202 определения первого наклона первой оси видимости, связанной с одной из указанных точек пронзания, и второго наклона второй оси видимости, связанной с другой из указанных точек пронзания. В некоторых вариантах реализации можно выполнять только четвертый этап 201 или пятый этап 202. Наконец третий этап 103 адаптирован для определения пространственного разброса на основе расстояний и/или наклонов.
В первом варианте реализации вычисление оценки неточности проходит через вычисление стандартного отклонения обозначаемого  , которое измеряет пространственный разброс между точками проникновения и идеально распределенными точками ионосферы для минимизирования погрешности оценки времени распространения.
, которое измеряет пространственный разброс между точками проникновения и идеально распределенными точками ионосферы для минимизирования погрешности оценки времени распространения.
Идеально распределенные точки находятся на единичной окружности, центром которой является интересующая точка, и радиус определен. Эти точки разделены углом , где - количество точек. Точки проникновения (IPP) проецируются на окружность, содержащую идеально распределенные точки. Фигура 3 представляет два примера этой проекции. Фигура 4 представляет слева пример проекции пяти точек проникновения и справа - пример пяти идеально распределенных точек. В случае фигуры 4 проецируемые точки разделены углом, записываемым  , и идеальные точки разделены углом
, и идеальные точки разделены углом  .
.
В данном случае стандартное отклонение, обозначаемое , получают как среднее значение квадрата разности между:
- углами , выраженными лучами в проецируемые точки,
- углами , выраженными лучами в идеально распределенные точки.
E [ ] представляет математическое ожидание.
В этом уравнении с - параметр конфигурации, позволяющий определять вес измерения углового разброса в оценке погрешности вычисления задержки распространения. Этот параметр определяют через настройку на основе фактических данных в зависимости от минимального объема защиты, который система SBAS выбирает для трансляции.
Для того чтобы упростить вычисление среднего значения, возможно не принимать во внимание вклад последнего угла . Действительно, значение этого угла содержится в других углах через формулу  . Тогда формула стандартного отклонения представляет собой:
. Тогда формула стандартного отклонения представляет собой:
Значение этого стандартного отклонения ограничивается конечным значением, каким бы ни было количество точек проникновения. Более того, оно будет нулем, когда точки проникновения совпадают с идеальной конфигурацией. Напротив, в случае, где точки проникновения в наиболее плохой конфигурации (это случай, когда все точки проникновения находятся в одной и той же точке), стандартное отклонение будет  .
.
Помимо принятия во внимание углового разброса, можно учитывать разброс в расстоянии точек проникновения по отношению к интересующей точке.
Возможно, для реализации этого, добавить коэффициент в выражение стандартного отклонения. Для этого рассматривают точки прокалывания, расположенные за пределами расстояния  интересующей точки IGP. До этого расстояния точки IPP рассматриваются как достаточно близкие для допущения соответствующей таксономии. Типично расстояние , такое, как представлено на фигуре 5, соответствует основанию конуса раскрыва с величиной 3,5°, 5° и т.д., позволяет определить точки, которые принимаются во внимание в вычислении пространственной дисперсии.
интересующей точки IGP. До этого расстояния точки IPP рассматриваются как достаточно близкие для допущения соответствующей таксономии. Типично расстояние , такое, как представлено на фигуре 5, соответствует основанию конуса раскрыва с величиной 3,5°, 5° и т.д., позволяет определить точки, которые принимаются во внимание в вычислении пространственной дисперсии.
Тогда, параметр, определяющий пространственный разброс:
В этом уравнении  - сферическое расстояние между точкой проникновения i и интересующей точкой многогранника, c - параметр конфигурации, позволяющий определять вес измерения пространственного разброса в оценке погрешности вычисления задержки распространения, n - количество рассмотренных точек перехвата и
- сферическое расстояние между точкой проникновения i и интересующей точкой многогранника, c - параметр конфигурации, позволяющий определять вес измерения пространственного разброса в оценке погрешности вычисления задержки распространения, n - количество рассмотренных точек перехвата и  - целое, определяемое так:
- целое, определяемое так:
Тогда, стандартное отклонение определяется следующим образом:

В этом уравнении β - параметр настройки (расположенный между 0 и 1), позволяющий дать приоритет одному или другому члену уравнения.
Во втором варианте вычисления разброса по расстоянию точек проникновения по отношению к интересующей точке, точки проникновения классифицируются в зависимости от их расстояний до интересующей точки. Зона вокруг интересующей точки разделена на K смежных колец таких, как представлены на фигуре 6. В каждой зоне расстояния между интересующей точкой и точками проникновения коррелированы. Каждому кольцу k соответствует весовой коэффициент, называемый  , и количество точек проникновения, называемых
, и количество точек проникновения, называемых  . Тогда общее количество точек проникновения, принятых во внимание, =
. Тогда общее количество точек проникновения, принятых во внимание, =  . Коэффициенты определяются согласно убывающей числовой закономерности числового убывания, максимальные на диске, содержащем интересующую точку, и минимальные за пределом последнего кольца.
. Коэффициенты определяются согласно убывающей числовой закономерности числового убывания, максимальные на диске, содержащем интересующую точку, и минимальные за пределом последнего кольца.
В этом случае параметр, определяющий пространственный разброс, получают благодаря уравнению:

Результат этого уравнения подобен энтропии. Это уравнение получается на основе дискретизации следующего общего уравнения:

В этом уравнении p(x) - плотность вероятности получить точку проникновения в кольце, расположенном на расстоянии между x и x+dx от интересующей точки.
Кроме того, можно принимать во внимание наклон оси видимости, связанной с точкой проникновения. В этом случае коэффициент наклона F оси видимости определяется через:
В этом уравнении El - возвышение пути,  - радиус земли, и h - высота ионосферы. Эти различные элементы представлены на фигуре 7.
- радиус земли, и h - высота ионосферы. Эти различные элементы представлены на фигуре 7.
Этот коэффициент наклона позволяет сделать согласование между временем пути в случае вертикальной оси и временем пути в случае наклонной оси. Принцип, таким образом, заключается в том, чтобы рассматривать пути с вертикальной осью как пути, для которых вычисление продолжительности наилучшее. Действительно, вычисление времени пути создает гипотезу о тонком ионосферном слое, эта гипотеза вызывает, таким образом, погрешность в случае, когда ось пути наклонена.
Стандартное отклонение, таким образом, увеличивается на следующий коэффициент:

В этом уравнении с - параметр конфигурации, позволяющий определять вес измерения разброса наклона в оценке погрешности вычисления задержки распространения и  представляет функцию Лапласа коэффициента наклона. Эта функция Лапласа представляет измерение разницы между значением коэффициента наклона F в любой точке проникновения и средним значением коэффициента наклона F вблизи точки проникновения. Этот член, таким образом, позволяет моделировать колебания коэффициента наклона вблизи точки многогранника, заданной для его возвышения.
представляет функцию Лапласа коэффициента наклона. Эта функция Лапласа представляет измерение разницы между значением коэффициента наклона F в любой точке проникновения и средним значением коэффициента наклона F вблизи точки проникновения. Этот член, таким образом, позволяет моделировать колебания коэффициента наклона вблизи точки многогранника, заданной для его возвышения.
Стандартное отклонение, обозначаемое , принимает во внимание критерий наклона и, таким образом, определяется через:
Коэффициенты βi выбираются таким образом, что  .
.
Во втором варианте реализации вычисление оценки неточности проходит через вычисление стандартного отклонения, обозначаемого , которое измеряет пространственный разброс между точками проникновения и идеально распределенными точками. Эти точки расположены на определенном расстоянии от интересующей точки.
В этом случае стандартное отклонение имеет форму:

Таким образом, добавляют, к каждой точке i, весовой коэффициент  .
.
Эти весовые коэффициенты  могут быть получены с использованием априорной функции, состоящей из пространственной ионосферной корреляции, деленной на стандартное отклонение в вертикальной задержке, связанной с точкой проникновения. Этот вес имеет вид:
могут быть получены с использованием априорной функции, состоящей из пространственной ионосферной корреляции, деленной на стандартное отклонение в вертикальной задержке, связанной с точкой проникновения. Этот вес имеет вид:
В этом уравнении - сферическое расстояние между точкой проникновения i и интересующей точкой, n - общее количество точек проникновения,  и - параметры конфигурации. Это уравнение, таким образом, дает большой вес точке проникновения, далекой от интересующей точки.
и - параметры конфигурации. Это уравнение, таким образом, дает большой вес точке проникновения, далекой от интересующей точки.
Другое определение весовых коэффициентов - следующее, это определение дает менее важный весовой коэффициент:
 .
.
Стандартное отклонение  представляет шум измерения, видимый как некоррелированное распределение белого шума.
представляет шум измерения, видимый как некоррелированное распределение белого шума.
В случае идеального распределения этих точек, в равной мере, возможно принять во внимание наклон оси видимости, связанной с точкой проникновения. Для этого можно инкрементировать весовые коэффициенты для того, чтобы принять во внимание угол возвышения оси видимости. Весовые коэффициенты, таким образом, модифицируются следующим образом:
Типичное значение неточности задержки распространения, связанной с интересующей точкой IGP, тогда задается следующей формулой:

В этом уравнении GIVE - погрешность неточности ионосферной задержки (по англосаксонскому акрониму Grid Ionospheric Vertical Error(Вертикальная ионосферная погрешность в узлах ионосферной сетки)), TGIVE - дисперсия, вычисленная посредством интерполяции на основе модели TRIN и связанной фильтрации, - стандартное отклонение распределения Стьюдента с степенями свободы, - количество упомянутых точек пронзания IPP, используемых для вычисления , является средним значением погрешности вычисления ионосферной задержки в каждой точке прокалывания IPP, - коэффициент, позволяющий нормализовать .
Специалист знает, как вычислить значения TGIVE и UIVE, он может, в частности, обратиться к документу “Preliminary analysis of grid ionospheric vertical error for GAGAN” Niranjan Prasad, изданному в GPS SOLUTIONS, SPRINGER, BERLIN, DE, том 11, номер 4, 19 июня 2007, страницы 281-288, который описывает вариант вычислений этих параметров.
Специалист также знает, как пользоваться документом “A New Method for Monitoring the Earth’s Ionospheric Total Electron Content Using the GPS Global Network” A.J. Mannucci, B.D. Wilson, C.D. Edwards, опубликованным во время конференции ION GPS-93.
Этот документ представляет решение TRIN, по его англосаксонскому акрониму TRiangular INterpolation (Триангулярная Интерполяция), с целью оценки содержания электронов ионосферы и локализации электронного содержания с помощью измерения дублированных частот, полученных множеством станций или датчиков обнаружения. В этом методе ионосфера рассматривается как тонкий слой, в котором сосредоточена вся ионосферная задержка сигнала. Этот тонкий слой позволяет полагать, что величина задержки воспринимаемой сигналом, зависит только от TEC в месте, где он прокалывает тонкий слой ионосферы, эта точка называется точкой прокалывания ионосферы (IPP). Величина, обычная для описания задержки в IPP - задержка, которую вертикальный сигнал собирает в этой точке. Это связано с вертикальной TEC (VTEC), то есть с интегралом электронной плотности, включаемой ионосферой на протяжении вертикальной траектории сигнала в ионосфере.
Этот способ моделирует ионосферный слой, предполагаемый тонким, посредством политопиальной аппроксимации. Модель построена с использованием правильного многогранника, основа которого усовершенствована последовательным разделением (новая вершина ставится в центр каждой грани) так, как это представлено на фигуре 8. Она также зафиксирована относительно солнечной системы, которая является магнитной системой отсчета, так что каждая вершина имеет постоянный солнечный час.
Оценка VTEC в каждой вершине сетки модели TRIN, такой как определено ранее, осуществляется в реальном времени через классический способ сглаживания (типа Кальмана). Измерения, которые подаются из фильтра сглаживания, определяются на основе значения VTEC, связанного с точкой прокалывания IPP. Эти измерения математически построены как взвешенное уравнение линейной интерполяции каждой точки IPP (точки P) с тремя вершинами треугольника, содержащего точку IPP (v1, v2, v3), смотреть фигуру 9. Эти измерения, таким образом, определены с использованием отношения  . В этом отношении
. В этом отношении  представляет VTEC (известный) точки P,
представляет VTEC (известный) точки P,  представляет VTEC в точке vi, который необходимо сгладить, и
представляет VTEC в точке vi, который необходимо сгладить, и  представляет весовой коэффициент в точке vi.
представляет весовой коэффициент в точке vi.
Неизвестные значения, таким образом, представляют собой , связанные с каждой вершиной. Процесс фильтрации (к примеру, фильтр Кальмана) адаптирует значения , используя отношение . Это отношение используется для каждой точки P, где измеряется VTEC. Выходы фильтров - пара значений VTEC и дисперсия VTEC для каждой вершины vi многогранника.
На втором этапе для каждой из точек сетки (IGP) классический метод TRIN позволяет вычислить среднее взвешенное значение при помощи трех значений VTEC, оцененных вблизи сетки. Формула линейной интерполяции есть отношение , где переменные теперь известны. Таким образом, речь идет о процессе, обратном первому этапу. Выходы фильтра - пара значений VTEC и дисперсия VTEC для каждой вершины для каждой IGP сетки. Значение дисперсии VTEC, связанной с IGP, обозначается TGIVE_basic. Это, в частности, представлено на фигуре 10.
Таким образом, возможно, инкрементировать TGIVE_basic базовой дисперсии любой из точек IGP с локальной информацией, введенной точкой IPP, для того, чтобы избежать слишком оптимистичной оценки, исходящей из глобальной модели TRIN. Это позволяет гарантировать полноту ионосферной коррекции для каждой точки сетки.





Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Распределенная архитектура для радионавигационного оборудования
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн

