Результат интеллектуальной деятельности: СПОСОБ ПОЗИЦИОНИРОВАНИЯ ЗЕРКАЛ ТРЕХОСНОГО ЛАЗЕРНОГО ГИРОМЕТРА, В ЧАСТНОСТИ, ПРИ ЗАПУСКЕ ЛАЗЕРНОГО ГИРОМЕТРА
Вид РИД
Изобретение
Настоящее изобретение касается способа позиционирования подвижных зеркал в устройстве, содержащем лазерные резонаторы, при этом мощность лазерных волн, проходящих через резонаторы, зависит от положения зеркал. Его применяют, например, при запуске лазерного гирометра, в частности, трехосного лазерного гирометра.
Гирометр является датчиком, позволяющим измерять угловую скорость. Например, инерционный счетчик текущих координат использует три лазерных гирометра и три акселерометра для полного определения движения носителя в каждый момент и воссоздания, таким образом, его перемещения. Одноосный лазерный гирометр позволяет измерять угловую скорость только вокруг одной оси. Он содержит кольцевой лазерный резонатор, в котором два пучка распространяются в противоположных направлениях. Он содержит также систему считывания. Когда резонатор приводят во вращение со скоростью Ω, за счет эффекта Саньяка происходит сдвиг оптических частот на величину, пропорциональную Ω. Устройство, которое позволяет измерить эту разность частот, является системой считывания. Кольцевой лазерный резонатор содержит оптический кольцевой резонатор, выходной ответвитель лазерных пучков и оптическую среду усиления с системой своего питания. Через кольцевой оптический резонатор, состоящий, по меньшей мере, из трех зеркал, образующих замкнутый путь, могут проходить два пучка в двух противоположных направлениях. Когда резонатор является плоским, направление чувствительной оси лазерного гирометра определено простой нормалью к плоскости. Периметр оптического резонатора, представляющий собой сумму расстояний между зеркалами, называют также длиной резонатора и обозначают L. Например, четыре зеркала А, Е, В и С могут образовать квадратный кольцевой оптический резонатор, длина которого равна четырехкратной длине стороны АЕ. Через этот резонатор может проходить одна волна по часовой стрелке от А к Е и другая волна против часовой стрелки от Е к А. Выходной ответвитель, который позволяет извлечь часть мощности лазерных волн, проходящих через резонатор, обычно образован одним из зеркал, которое до некоторой степени является пропускающим. Оптический резонатор выполняет также роль спектрального фильтра: только моды резонатора, то есть волны, оптическая частота которых является кратной c/L, где с является скоростью света, могут в нем распространяться по замкнутому кольцу. Для резонаторов обычного размера, то есть в которых L меньше 30 см, спектральный интервал c/L между двумя модами превышает гигагерц (ГГц). В лазерных гирометрах среда усиления обычно состоит из газовой смеси гелия и неона, заключенной под небольшим давлением в герметичном резонаторе. В этом случае оптическое усиление создается на одном или нескольких сегментов резонатора, в которых газ ионизируется, например, под действием разряда между анодом и катодом. Однако коэффициент усиления происходит только для некоторых полос оптических частот, к тому же относительно узких для данной газовой среды усиления, как правило, имеющих ширину порядка гигагерца. В этом случае лазерный эффект получают на оптических частотах, при которых коэффициент усиления в среде усиления превышает потери, которые происходят во время распространения в резонаторе и во время отражения на зеркалах. В случае смеси гелий-неон одна из полос усиления находится в видимой области при длине волны около 633 нанометра (нм). Обычно зеркала предусматривают с достаточной степенью отражения только в этом диапазоне оптических частот, поэтому лазерный эффект возможен только при длине волны около 633 нм. При вышеуказанном порядке величин моды резонатора могут быть относительно далекими от максимального коэффициента усиления. Следовательно, при запуске лазерного гирометра длину L резонатора необходимо корректировать в сторону оптимального значения для схождения моды к максимальному коэффициенту лазерного усиления. Однако в зависимости от тепловых явлений расширения и сжатия, действующих на лазерный гирометр между двумя подачами напряжения, длина L изменяется. Если при подаче напряжения длина резонатора не является адекватной, лазерный гирометр не использует полностью коэффициент усиления среды усиления, содержащейся в резонаторе.
В настоящее время для исправления этого явления используют передвижное зеркало, то есть подвижное зеркало, которое можно перемещать поступательным движением, и зеркало, позволяющее отбирать часть одной из двух волн для измерения ее интенсивности. Регулировку подвижного зеркала производят путем последовательных смещений поступательным движением в резонаторе. При этом измеряют интенсивность волны для каждого значения смещения. Задачей является схождение к значению смещения, соответствующему максимальной интенсивности, и это значение соответствует максимальному коэффициенту усиления оптического резонатора, позволяющему максимально использовать лазерный эффект. Однако в известных технических решениях время схождения при запуске лазерного гирометра часто оказывается длинным по самым разным причинам. В данном случае речь идет о технических проблемах, решение которых и является задачей настоящего изобретения.
Согласно первому известному решению, на первом этапе сканируют весь диапазон смещения зеркала от одного конца к другому, измеряя интенсивность излучаемой волны, затем на втором этапе возвращаются к значению смещения, позволившему измерить наибольшую интенсивность. Однако это решение подвержено явлению гистерезиса: при возвращении к значению смещения, которое соответствовало максимуму, некоторые характеристики меняются, и максимум уже находится в другом месте. Поэтому необходимо затратить дополнительное время для постепенного приведения к максимуму.
Согласно второму известному решению, сканирование производят, начиная от заданного положения подвижного зеркала, причем это положение получают из таблицы соответствия внешних температурных условий и положений подвижного зеркала, и останавливаются на первом встреченном максимуме. Как правило, таблицу поставляет производитель лазерного гирометра для данного типа лазерного гирометра. При данных внешних температурных условиях она дает соответствие положения подвижного зеркала для получения максимальной интенсивности или, по крайней мере, интенсивности, близкой к максимальному значению. Однако при изменении длины L оптического резонатора путем смещения зеркала излучаемая волна содержит не только глобальные или главные максимумы, при которых интенсивность действительно достигает верхнего предела; локальные или вторичные максимумы, при которых интенсивность является максимальной только вблизи одного положения, могут проявляться также вблизи минимума, что отражает конкуренцию между двумя модами, одна из которых только начинает выходить с одной стороны кривой коэффициента усиления, тогда как другая входит с противоположной стороны. Следовательно, на первом этапе подвижное зеркало может временно запаздывать вокруг положения, соответствующего вторичному максимуму, и затем только на втором этапе стремиться к положению, соответствующему главному максимуму. Это явление существенно замедляет время схождения, что делает невозможным использование лазерного гирометра.
После нахождения значения смещения, соответствующего максимальному коэффициенту усиления, необходимо автоматическое регулирование для осуществления периодических и регулярных смещений подвижного зеркала с меньшей амплитудой и коррекции тепловых явлений расширения/сжатия, испытываемых резонатором. Эти смещения должны обеспечивать отслеживание максимума, почти постоянно меняя положение подвижного зеркала, что является непростой задачей. В частности, в известных технических решениях часто наблюдается так называемое явление «скачка моды». Это явление будет подробно описано ниже в настоящей заявке. Оно характеризуется резким смещением подвижного зеркала и резким колебанием частоты излучаемой волны. Таким образом, возникает еще одна техническая проблема, которую призвано решить настоящее изобретение.
Существуют также лазерные гирометры с тремя осями или «трехосные», содержащие три оптических резонатора, расположенных перпендикулярно друг к другу парами. Каждый из трех оптических резонаторов воспроизводит описанные выше принципы работы одноосного лазерного гирометра для измерения угловой скорости гирометра вокруг его чувствительной оси. В этих трехосных лазерных гирометрах подвижные зеркала часто распределены между резонаторами таким образом, чтобы смещение одного подвижного зеркала влияло на длину не одного резонатора, а на длину двух резонаторов. Было предложено применять независимо для трех резонаторов такого трехосного гирометра одно из вышеуказанных известных решений, описанных для обеспечения схождения при запуске одноосного гирометра. На первом этапе речь идет о последовательном определении для каждого из трех резонаторов длины, которая обеспечивает ему наибольшую интенсивность при помощи одного из двух описанных выше известных способов. После определения трех длин на втором этапе определяют триплет положений зеркал, который позволяет получить одновременно три длины резонатора, причем при помощи аналитического метода, который будет описан ниже. Но при независимом применении одного из двух известных решений к трем резонаторам трехосного гирометра не учитывают невоспроизводимость резонаторов и, следовательно, их различия в поведении. Так, один резонатор может следовать главному максимуму, тогда как другой резонатор может следовать вторичному максимуму. Само собой разумеется также, что явления гистерезиса, задержек, возникающих по причины вторичных максимумов, и скачка моды скорректировать еще труднее, поскольку они возникают одновременно в резонаторах, длины которых взаимосвязаны. Время схождения такого гирометра с тремя резонаторами трудно контролировать. Здесь тоже идет речь об одной из технических проблем, решаемых настоящим изобретением.
Задачей настоящего изобретения является сведение к минимуму времени при запуске гирометра, необходимого для приведения к максимальному коэффициенту усиления оптического резонатора одноосного лазерного гирометра или к максимальному коэффициенту усиления оптических резонаторов трехосного лазерного гирометра. Для этого изобретением предлагается, в частности, последовательность запуска для лазерного гирометра, содержащая фазу управления подвижным зеркалом или подвижными зеркалами, которая улучшает определение первоначального позиционирования подвижного зеркала или подвижных зеркал в оптических резонаторах. В этой связи объектом настоящего изобретения является способ позиционирования передвижного зеркала в лазерном резонаторе. Лазерный резонатор содержит среду оптического усиления, которую можно возбуждать с целью генерирования световых волн. Лазерный резонатор содержит также оптический резонатор, образованный набором зеркал, включая передвижное зеркало, при этом длина оптического резонатора зависит от положения передвижного зеркала. Передвижное зеркало можно перемещать в диапазоне положений, придающих оптическому резонатору длины, при которых среда усиления генерирует, по меньшей мере, одну лазерную волну. Способ содержит фазу предварительного позиционирования зеркала в заранее определенном первоначальном положении. Способ содержит также фазу перемещения поступательным движением зеркала в диапазоне с амплитудой, равной промежуточной моде оптического резонатора, таким образом, чтобы оптический резонатор проходил через длину, при которой газ обеспечивает максимальный коэффициент усиления, при этом интенсивность лазерной волны измеряют для каждого положения, занимаемого зеркалом. Способ содержит также фазу позиционирования зеркала в конечном положении, соответствующем измерению самой большой интенсивности.
Предпочтительно первоначальное положение зеркала можно извлечь из таблицы соответствия значениям температуры положения зеркала, придающего оптическому резонатору длину, при которой среда усиления обеспечивает максимальный коэффициент усиления при упомянутой температуре.
Например, среда усиления может быть газом, ионизируемым электрическим разрядом в лазерном гирометре.
Способ может содержать предварительную фазу сканирования зеркала в диапазоне, охватывающем диапазон перемещения зеркала, но без измерения интенсивности волны, чтобы уменьшить гистерезис между фазой перемещения зеркала и фазой позиционирования зеркала.
Объектом настоящего изобретения является также способ позиционирования трех передвижных зеркал в устройстве, содержащем три кольцевых лазерных резонатора. Каждый из трех лазерных резонаторов содержит среду оптического усиления, возбуждаемую для генерирования световых волн. Каждый из трех лазерных резонаторов содержит также оптический резонатор, образованный набором зеркал, включая два из передвижных зеркал, при этом длина упомянутого оптического резонатора зависит от положения упомянутых двух передвижных зеркал, при этом упомянутые два передвижных зеркала можно перемещать в диапазоне положений, придающих оптическому резонатору длины, при которых среда усиления генерирует, по меньшей мере, одну лазерную волну. Каждое из трех передвижных зеркал участвует в образовании двух из трех оптических резонаторов. Способ содержит фазу предварительного позиционирования трех зеркал по первоначальному триплету заранее определенных соответствующих положений. Способ содержит также фазу перемещения поступательным движением трех зеркал в диапазонах с одинаковой амплитудой, меньшей или равной промежуточной моде оптического резонатора с наибольшей промежуточной модой, таким образом, чтобы каждый оптический резонатор проходил через длину, при которой среда усиления обеспечивает максимальный коэффициент усиления. Интенсивность лазерных волн, проходящих соответственно через каждый из оптических резонаторов, измеряют для каждого триплета положений, занимаемых зеркалами. Способ содержит также фазу определения, - на основании трех триплетов положений зеркал, позволяющих соответственно каждому из трех резонаторов обеспечивать максимальную интенсивность, - длины каждого из трех резонаторов, при которой упомянутый резонатор обеспечивает максимальную интенсивность. Способ содержит также фазу определения единственного конечного триплета положений зеркал, позволяющих придавать трем резонаторам длины, при которых они обеспечивают максимальную интенсивность. Способ содержит также фазу позиционирования зеркал по конечному триплету положений.
Предпочтительно первоначальный триплет положений трех зеркал извлекают из таблицы соответствия температурным значениям триплета положений зеркал, придающих соответственно каждому из оптических резонаторов длину, при которой усилительная среда дает максимальный коэффициент усиления при упомянутой температуре.
Например, среды усиления могут быть газами, ионизируемыми электрическим разрядом в трехосном гирометре.
Поскольку три оптических резонатора имеют одинаковую промежуточную моду, амплитуда перемещения трех зеркал может быть равной половине упомянутой промежуточной моды.
Способ может также содержать предварительную фазу сканирования трех зеркал в диапазонах, охватывающих диапазоны перемещения зеркал, но без измерения интенсивности волн, чтобы уменьшить гистерезис между фазой перемещения зеркал и фазой позиционирования зеркал.
Если устройство содержит механизм коррекции, позволяющий на основании конечного триплета положений постоянно корректировать положения передвижных зеркал таким образом, чтобы обеспечить, что резонаторы имеют соответствующие длины, позволяющие им постоянно обеспечивать максимальную интенсивность, то способ может содержать конечную фазу сравнения конечного триплета положений с триплетом положений, к которому механизм коррекции приводит зеркала после заданного промежутка времени. Если одно из зеркал удалилось от положения, которое оно занимало после фазы позиционирования, за пределы заданного порога, можно повторить предыдущие фазы способа и/или разность можно сохранить в памяти и/или констатировать неисправность устройства.
Основным преимуществом настоящего изобретения является то, что первоначальное позиционирование зеркала или зеркал больше не зависит от рабочей частоты системы автоматического регулирования зеркал, при этом упомянутая система выполнена с возможностью отслеживания максимума мощности, а не его первоначального выявления. Действительно, она работает в «медленном» частотном диапазоне порядка герца. Система, применяющая настоящее изобретение для определения первоначального положения, может работать в «быстром» частотном диапазоне порядка килогерца.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, на которых:
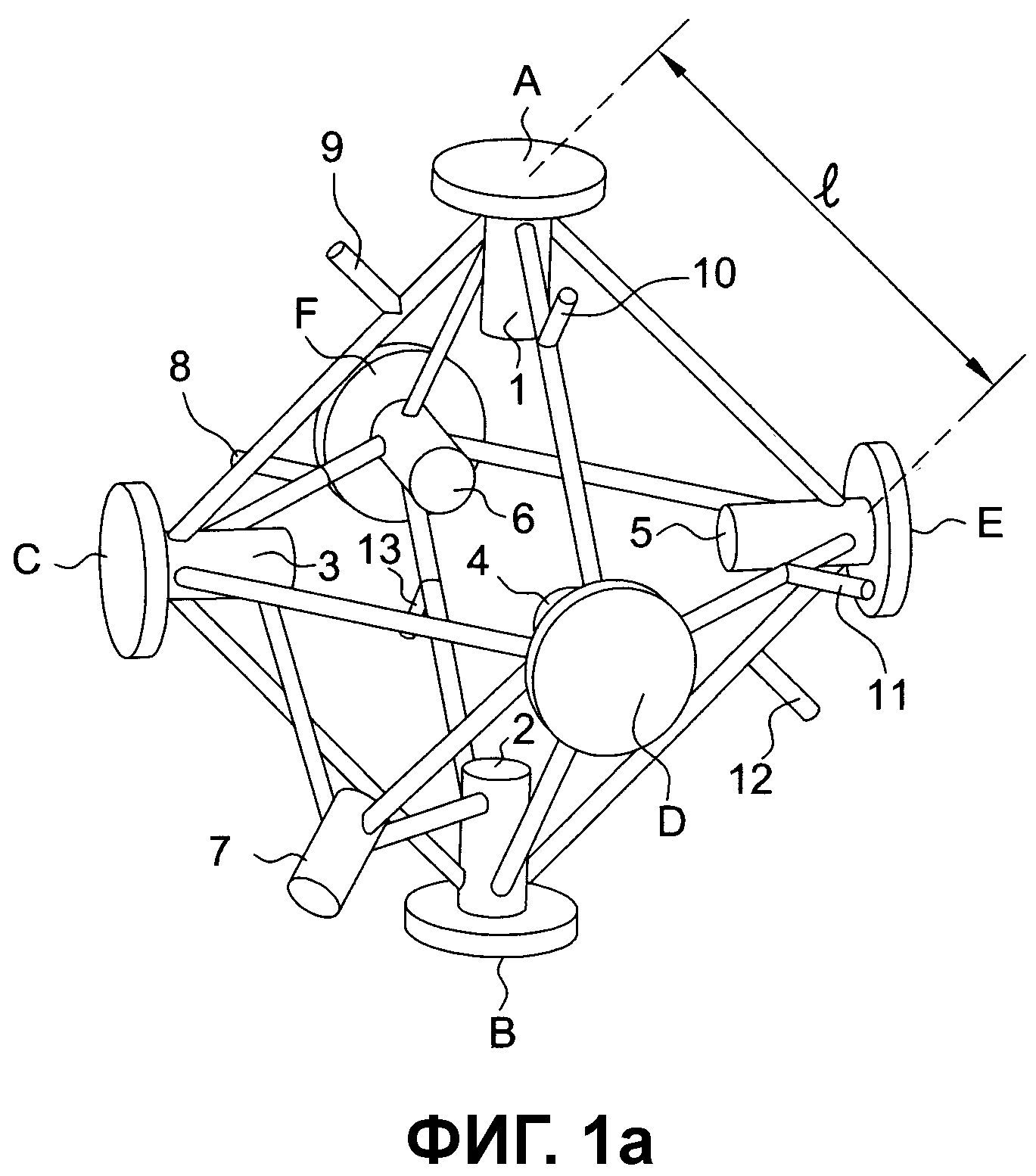
Фиг.1а - вид в перспективе примера оптических резонаторов известного трехосного лазерного гирометра.
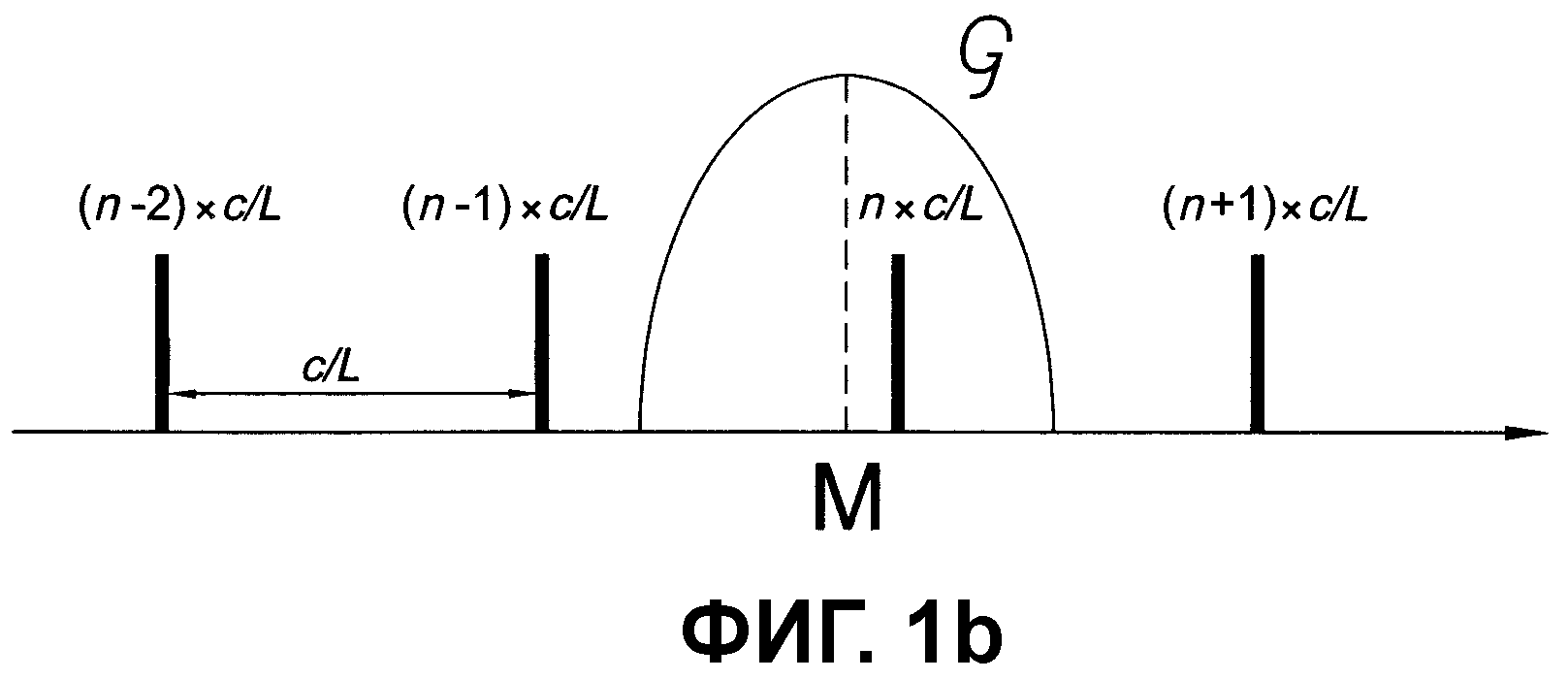
Фиг.1b - графическая иллюстрация лазерных мод оптического резонатора известного гирометра.
Фиг.2 - три графика, иллюстрирующие пример изменения лазерной мощности, излучаемой оптическими резонаторами трехосного гирометра, в зависимости от напряжений управления для их трех подвижных зеркал.
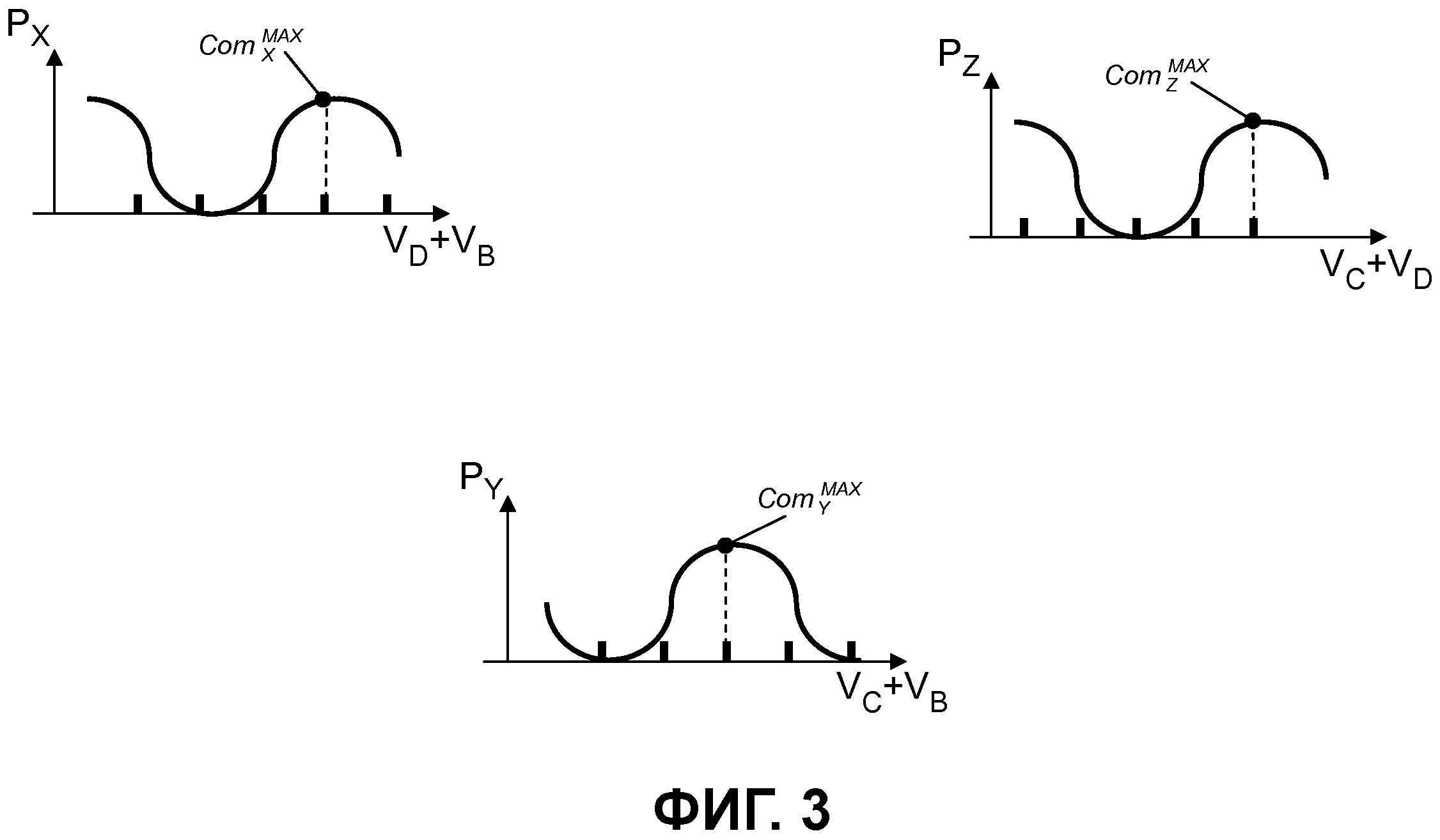
Фиг.3 - три графика, иллюстрирующие пример изменения лазерной мощности, излучаемой тремя оптическими резонаторами с одинаковой промежуточной модой трехосного гирометра, в зависимости от суммы напряжений управления, от которых они зависят.
Фиг.4 и 5 - два графика, иллюстрирующие особые свойства оптических резонаторов с одинаковой промежуточной модой трехосного гирометра.
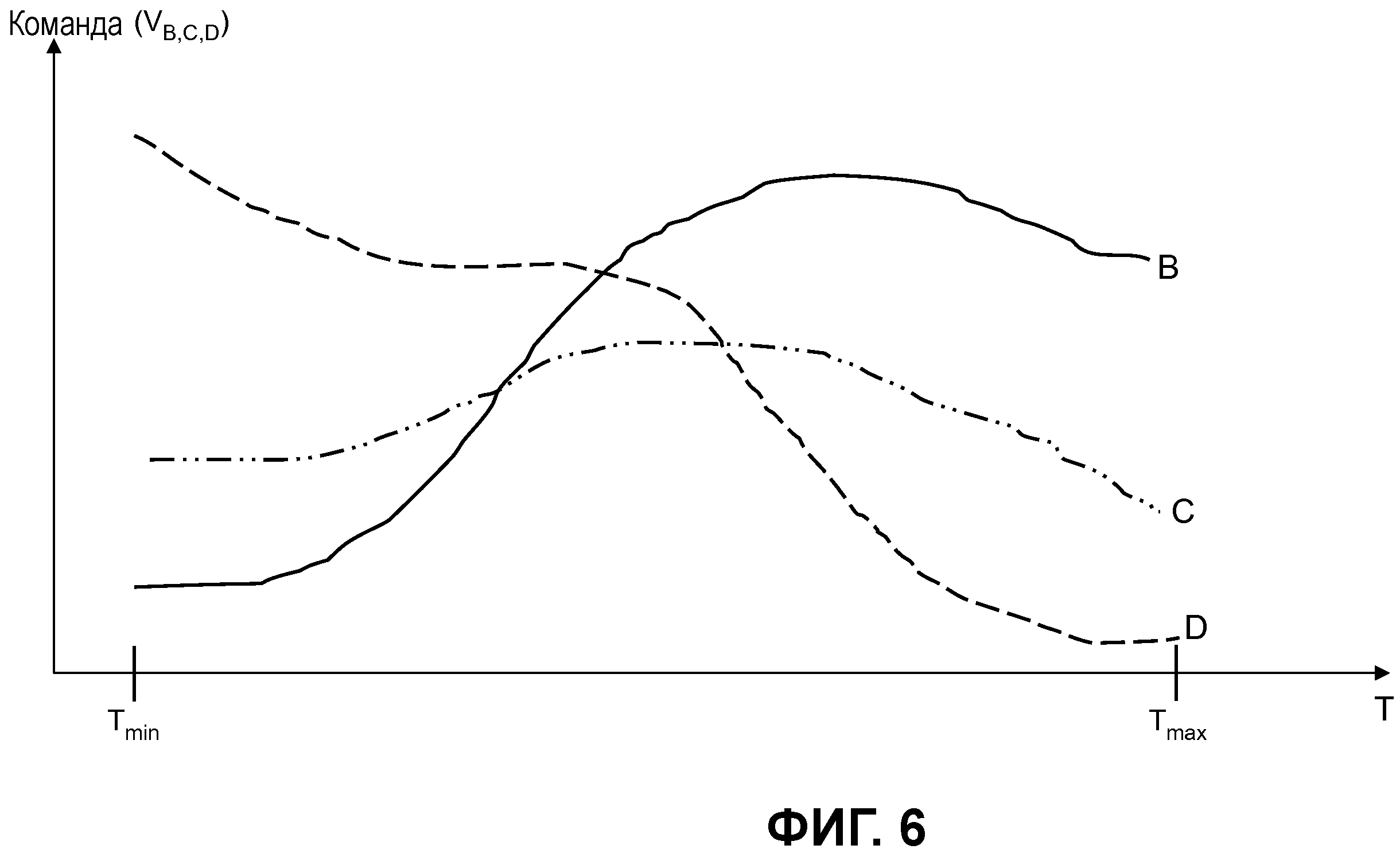
Фиг.6 - график, иллюстрирующий изменения команды управления подвижными зеркалами трехосного гирометра в зависимости от положительного термического градиента.
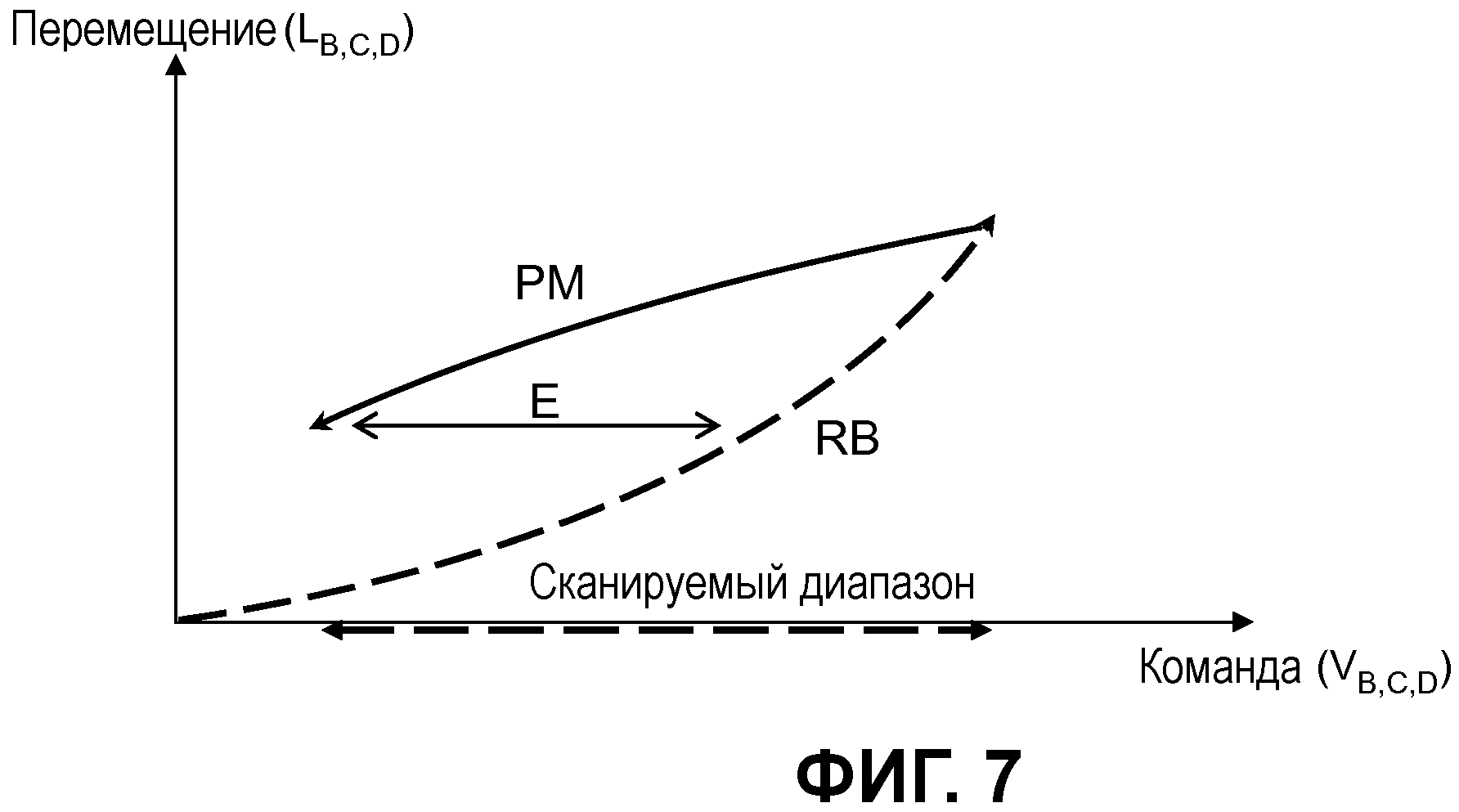
Фиг.7 - график, иллюстрирующий явление гистерезиса, наблюдаемое при перемещении подвижного зеркала оптического резонатора в известном лазерном гирометре.
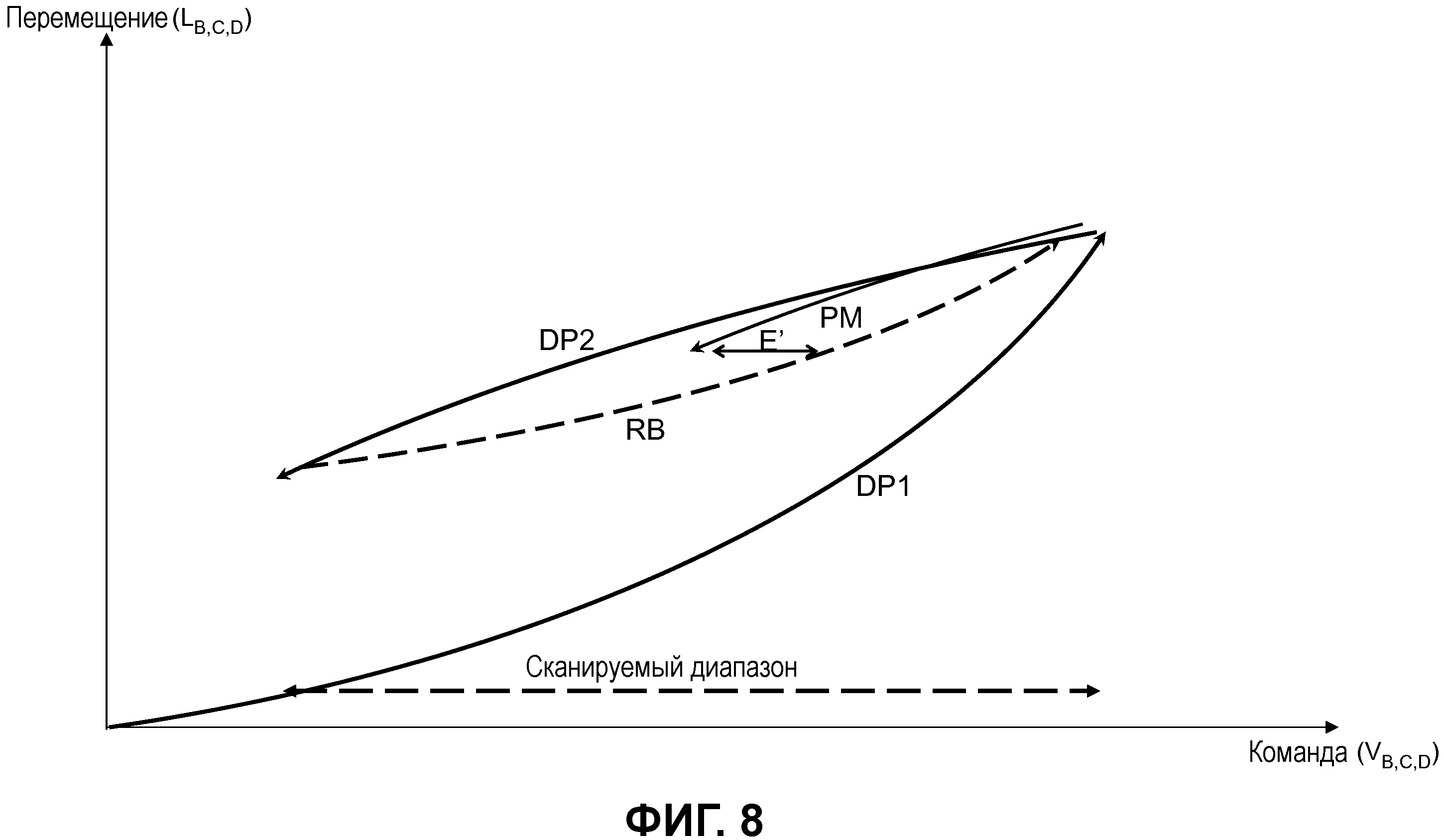
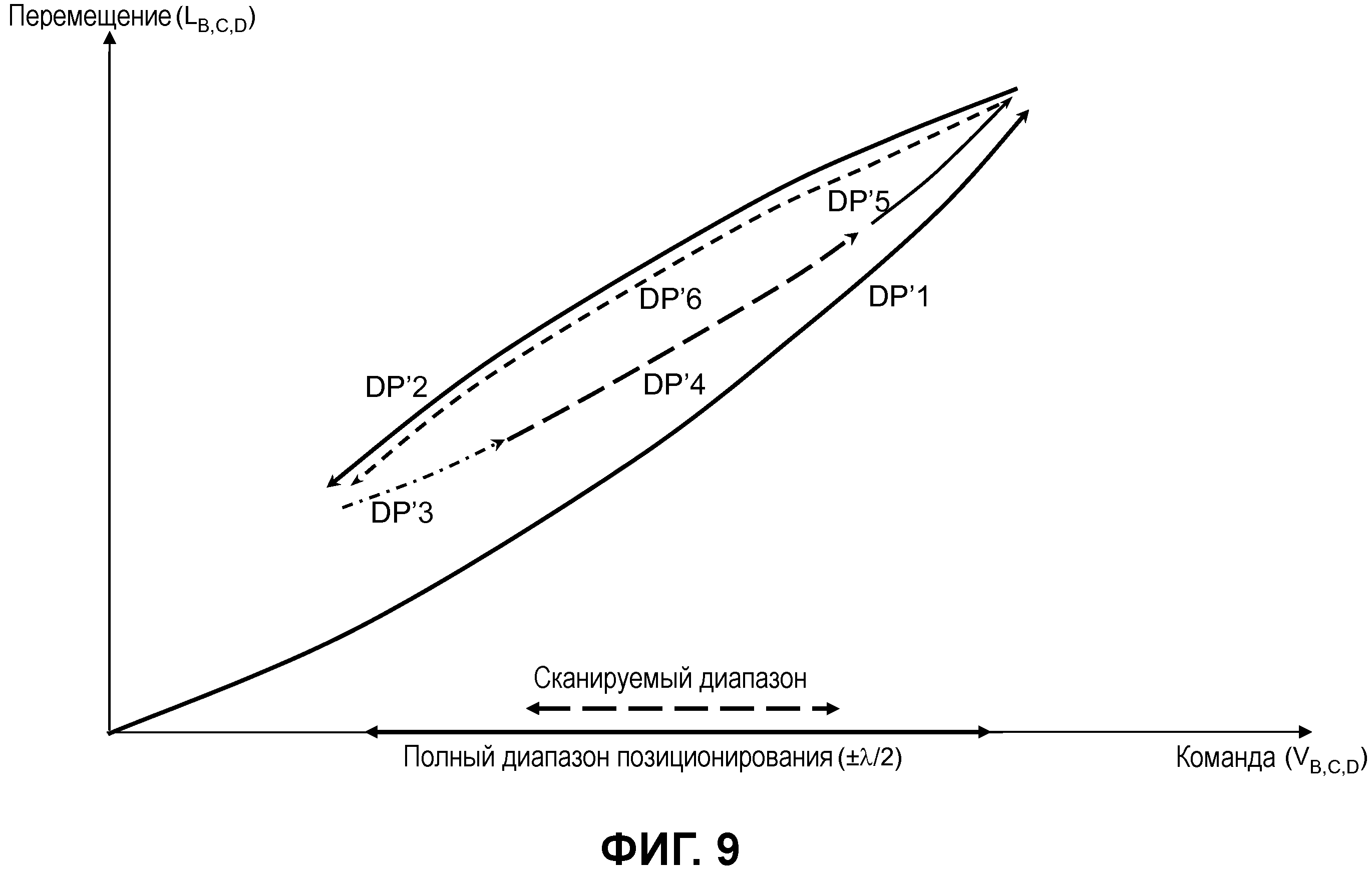
Фиг.8 и 9 - два графика, иллюстрирующие механизм уменьшения гистерезиса в заявленном лазерном гирометре.
На фиг.1 в перспективе показаны три оптических резонатора известного трехосного гирометра. Гирометр содержит шесть зеркал A, B, C, D, E и F. Зеркала A, B, C, D, E и F попарно соединены оптическими путями AC, AD, AE, AF, BC, BD, BE, BF, CD, CF, ED и EF одинаковой длины ℓ, при этом оптические пути обеспечивают распространение световых волн. Напротив зеркал A, B, C, D, E и F соответственно находятся емкости 1, 2, 3, 4, 5 и 6 с газом. Многогранник, образованный шестью зеркалами и двенадцатью оптическими путями, вписан в куб, при этом каждое из зеркал совпадает с центром стороны упомянутого куба. Полученное таким образом устройство содержит три замкнутых оптических пути ADBF, ACBE и FCDE, образующих соответственно три попарно ортогональных кольцевых оптических резонатора X, Y и Z одинаковой длины L=4×ℓ. Например, три зеркала В, С и D являются передвижными, то есть могут перемещаться поступательным движением. Благодаря наличию пьезоэлектрического привода, они могут удаляться или приближаться относительно центра многогранника по существу на 1 микрометр. Таким образом, соответствующие длины трех оптических резонаторов X, Y и Z можно корректировать вокруг значения L с точностью примерно до 0,01 микрометра. Следует заметить, что длина каждого из оптических резонаторов X, Y и Z зависит от положения двух из подвижных зеркал В, С и D. Следует также заметить, что положение каждого из подвижных зеркал В, С и D обуславливает длину двух из оптических резонаторов X, Y и Z. Зеркала А, Е и F являются выходными ответвителями: они позволяют производить измерения лазерной интенсивности. Таким образом, можно измерять соответствующие мощности волн, которые проходят через три оптических резонатора X, Y и Z. Катод 7, соединенный тремя капиллярами с емкостями 2, 3 и 4 газа, и шесть анодов 8, 9, 10, 11, 12 и 13 позволяют возбуждать газ-усилитель в оптических резонаторах X, Y и Z и генерировать, таким образом, лазерные волны, которые проходят через оптические резонаторы X, Y и Z. Три оптических резонатора X, Y и Z можно получить, выполнив сначала оптические пути AC, AD, AE, AF, BC, BD, BE, BF, CD, CF, ED и EF в блоке материала, характеризующегося контролируемым тепловым расширением, например, материала zérodur®, который отличается очень низким тепловым расширением. Затем в блок можно интегрировать зеркала A, B, C, D, E и F, а также емкости газа 1, 2, 3, 4, 5 и 6.
На фиг.1b графически показаны лазерные моды любого из оптических резонаторов X, Y и Z гирометра, показанного на фиг.1а. На оси абсцисс показана оптическая частота. Длина L оптического резонатора определяет частоты лазерных мод, которые он может излучать: этот набор частот образован гребенкой частот, кратных c/L, например, (m-2)×(c/L), (m-1)×(c/L), m×(c/L) и (m+1)×(c/L), где m является целым числом. При запуске гирометра длину каждого резонатора корректируют, чтобы привести моду как можно ближе к максимуму М коэффициента усиления газа-усилителя, при этом спектр коэффициента усиления показан параболической кривой G. Например, на фиг.1b на максимуме коэффициента усиления находится мода m, соответствующая частоте m×(c/L). После запуска гирометра тепловые изменения во времени, связанные с газовыми разрядами или с внешней средой, приводят к механической деформации гирометра за счет расширения/сжатия. Следовательно, длины трех лазерных резонаторов имеют тенденцию к изменению. Однако, как показано кривой G, газовые плазмы имеют коэффициент усиления незначительной спектральной ширины. Следовательно, оптические характеристики гирометра тоже меняются, и это изменение проявляется тем больше, чем больше мода m отклоняется от максимума М. Чтобы сохранять характеристики гирометра, в нем необходимо применять автономное устройство, называемое «устройством согласования длины резонатора» (ALC), которое поддерживает моду m как можно ближе к максимуму М. В случае одноосного лазерного гирометра с одним лазерным резонатором, который содержит подвижное зеркало, устройство ALC можно реализовать, например, при помощи фотодиода, измеряющего излучаемую лазерную мощность, и электроники автоматического регулирования, которая управляет подвижным зеркалом для сохранения максимальной излучаемой мощности. В случае трехосного лазерного гирометра, показанного на фиг.1а, между тремя резонаторами X, Y и Z попарно распределены зеркала, в частности, подвижные зеркала В, С и D. Следовательно, каждый резонатор уже невозможно настраивать независимо от двух других.
Как правило, подвижное зеркало представляет собой, по меньшей мере, одну мембрану, приклеенную на преобразователь на основе пьезоэлектрических керамических элементов. Керамические элементы управляются по положительному и отрицательному напряжению, и в результате этого управления они деформируются, увлекая за собой мембрану. Деформация мембраны создает механическое напряжение, действующее толкающим или тяговым усилием на центр зеркала. Таким образом, зеркало перемещается в одну или другую сторону поступательным движением. В дальнейшем командами управления будут считаться напряжения, обозначаемые VB, VC и VD, при этом перемещения LB, LC и LD соответственно пропорциональны этим напряжениям. Предположив, что все три подвижных зеркала имеют абсолютно одинаковые характеристики и, следовательно, характеризуются одинаковым механическим поведением, это можно выразить одним уравнением LB,C,D=GB,C,D×VB,C,D, где GB,C,D является коэффициентом усиления поступательного движения/электрики зеркал B, C и D. В реальности GB,C,D соответствует коэффициентам GB, GC и GD, каждый из которых может быть положительным или отрицательным в зависимости от концепции подвижного зеркала, и их значения могут тоже отличаться. Вместе с тем, в дальнейшем будет считаться, что все три подвижных зеркала B, C и D имеют коэффициент одного знака и сравнимое значение, обозначаемое G, при этом проверяется следующее уравнение 1:
|
В дальнейшем длины резонаторов X, Y и Z, когда подвижные зеркала находятся в состоянии покоя, то есть когда VB,C,D=0, будут обозначаться  . Длины LX, LY и LZ трех резонаторов связаны со смещениями зеркал LB, LC и LD системой уравнений
. Длины LX, LY и LZ трех резонаторов связаны со смещениями зеркал LB, LC и LD системой уравнений
|
что дает следующее матричное уравнение 2:
|
С другой стороны, чтобы получить резонаторы со значениями длины LX, LY и LZ, применяемые напряжения выражают следующим уравнением 3:
|
Для каждого резонатора устройство ALC определяет положение LX,Y,Z текущей лазерной моды относительно положения  , соответствующего максимальному коэффициенту усиления, и реагирует, чтобы уменьшить отклонение. Например, можно применить модулирование подвижных зеркал и синхронную демодуляцию измеренных мощностей. Получают сигнал SX,Y,Z, пропорциональный
, соответствующего максимальному коэффициенту усиления, и реагирует, чтобы уменьшить отклонение. Например, можно применить модулирование подвижных зеркал и синхронную демодуляцию измеренных мощностей. Получают сигнал SX,Y,Z, пропорциональный  , и можно получить интегрированное во времени значение
, и можно получить интегрированное во времени значение  .
.
После этого можно получить автономное автоматическое регулирование, генерируя в момент n+1 напряжения VB, VC и VD, смещенные от напряжений в момент n, где n является целым числом:
|
или, эквивалентно, управляя зеркалами при помощи напряжения:
|
где А обозначает коэффициент усиления между интегрированными величинами IX, IY и IZ и напряжениями VB, VC VD.
Сигналы SX, SY, SZ, IX, IY и IZ можно представить в виде дискретных величин и матричную операцию можно осуществить при помощи компьютерной программы. При этом выходные команды получают путем усиления напряжений, генерируемых аналого-цифровым преобразователем. Для осуществления операции при помощи аппаратного обеспечения можно и не применять конверсию этих сигналов. В этом случае выходные команды получают путем усиления напряжений, получаемых при материальной операции. Во всех случаях устройство производит дискретизацию значений IX, IY и IZ, чтобы их можно было отслеживать.
Поскольку оптический резонатор поддерживает гребенку лазерных мод, отделенных по частоте на величину c/L, лазерная мощность периодически изменяется в зависимости от L: лазерная мощность проходит через максимум и минимум каждый раз, когда L изменяется на длину оптической волны, обозначаемой λ. Кроме того, длина каждого резонатора меняется с командами VB, VC и VD. В выбранном примере изменение выражается как:
|
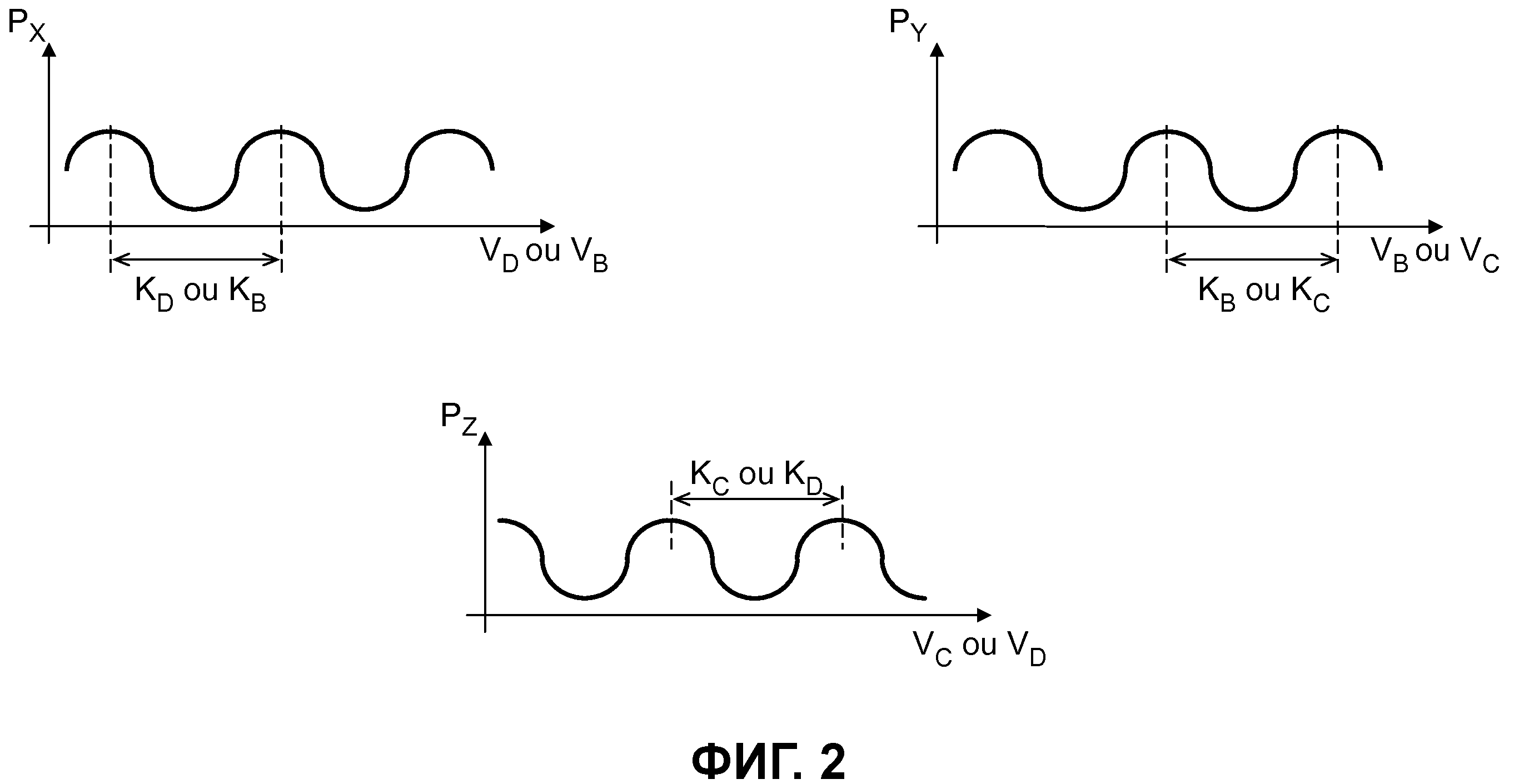
На фиг.2 показан пример изменения лазерных мощностей PX, PY и PZ, излучаемых резонаторами X, Y и Z соответственно, в зависимости от командных напряжений VB, VC и VD, подаваемых соответственно на зеркала В, С и D трехосного гирометра, показанного на фиг.1а. По конструкции гирометра РХ не зависит от VC, PY не зависит от VD, и PZ не зависит от VB. Как оказалось, в конечном счете, изменения мощностей происходят периодически с командами, и они имеют несколько главных максимумов. Действительно, как показано на фиг.1b, если длина L одного из резонаторов X, Y и Z изменяется непрерывно, то гребенка частот, кратных с/L, проходит относительно спектра коэффициента усиления, показанного параболической кривой G. Интенсивность и, следовательно, мощность, излучаемая этим резонатором, увеличивается, когда частота, кратная c/L, приближается к максимуму М, затем уменьшается, когда эта частота, кратная c/L, удаляется от максимума М. Иначе говоря, мощность, излучаемая резонатором, увеличивается, когда мода приближается к максимуму М, затем уменьшается, когда эта мода удаляется от максимума М. Поскольку моды входят и выходят из спектра коэффициента усиления одна за другой, когда гребенка проходит относительно спектра коэффициента усиления, мощность изменяется периодически. Поэтому на фиг.2 каждый из максимумов мощности соответствует моде или частоте, кратной c/L. Этим и объясняется явление «скачка моды»: меняя L таким образом, чтобы максимизировать излучаемую мощность, можно переходить от одной моды к другой. Однако по самым различным соображениям во время работы гирометра изменений моды следует избегать. Моду необходимо выбрать при запуске гирометра, затем следует придерживаться как можно ближе к максимуму мощности этой моды в течение всей работы гирометра. Вместе с тем, необходимо отметить, что от одного запуска гирометра к другому мода может отличаться в зависимости от внешних температурных условий и в зависимости от первоначального положения подвижных зеркал. Следует также отметить, что мода может отличаться от одного резонатора к другому.
На фиг.2 показаны также величины КВ, КС и KD, которые является изменениями командных напряжений на зеркалах В, С и D соответственно, которые позволяют изменять длины резонаторов X, Y и Z на длину оптической волны λ. Хотя подвижные зеркала имеют по существу одинаковый коэффициент усиления поступательное движение/электрика G, незначительные различия между ними могут крыться в большом перемещении порядка λ, если считать, что величины КВ, КС и KD могут меняться от одного зеркала к другому. С другой стороны, геометрия трехосного резонатора позволяет обеспечивать независимость этих значений от рассматриваемого резонатора:
|
В дальнейшем величины КВ, КС и KD, которые позволяют изменять продольные моды, излучаемые лазерными резонаторами, и которые характеризуют динамику подвижных зеркал, будут называться «промежуточными модами».
Для случая, когда три подвижных зеркала В, С и D трехосного гирометра, показанного на фиг.1а, имеют одинаковую промежуточную моду К=КВ=КС=KD, на фиг.3 показан пример изменения лазерных мощностей, излучаемых тремя резонаторами X, Y и Z, в зависимости от суммы двух командных напряжений, от которых они зависят, то есть VD+VB, VC+VB и VC+VD соответственно. Суммы командных напряжений  ,
,  и
и  позволяют получить максимальную мощность, излучаемую резонаторами X, Y и Z соответственно.
позволяют получить максимальную мощность, излучаемую резонаторами X, Y и Z соответственно.
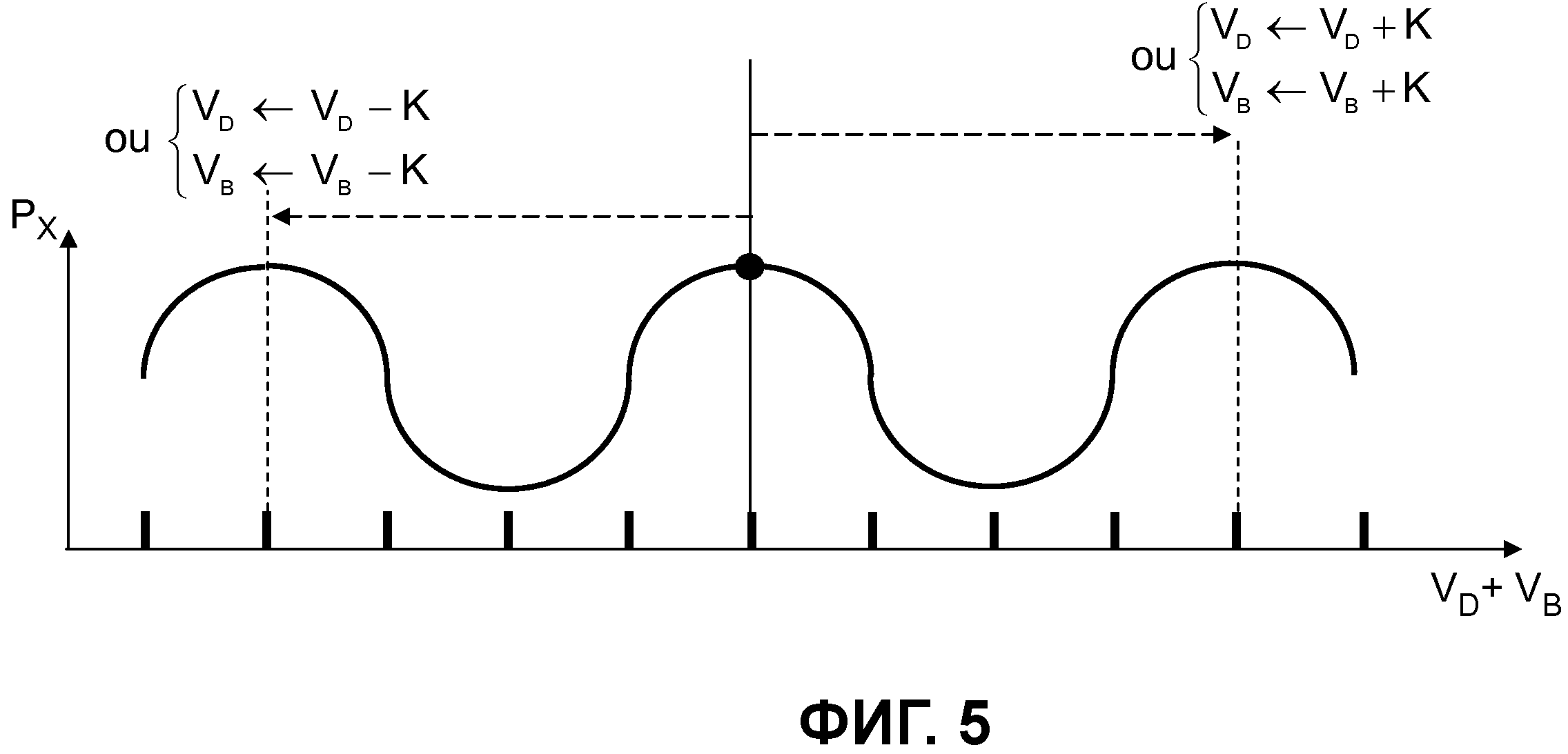
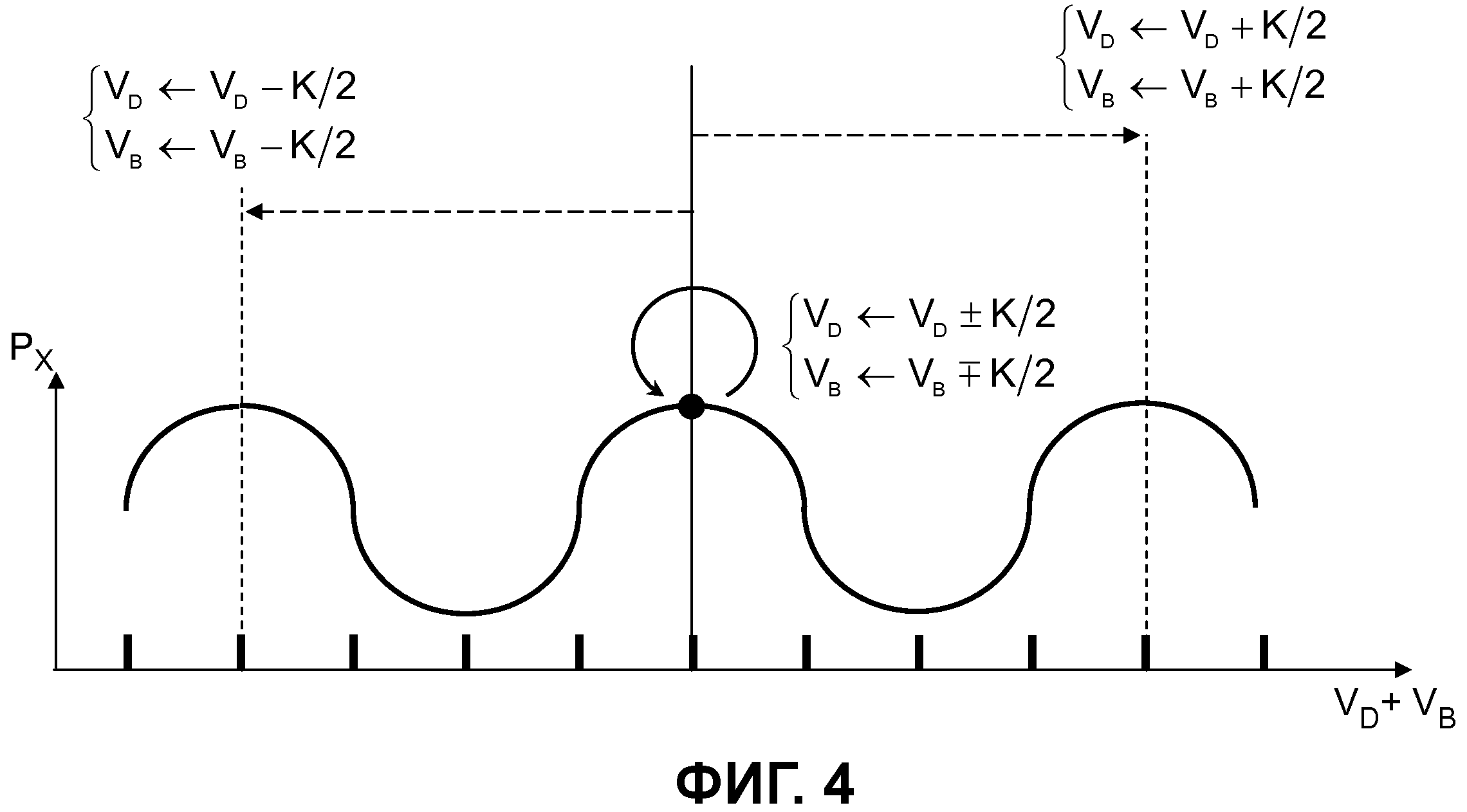
Фиг.4 и 5 иллюстрируют два свойства резонаторов X, Y и Z с одинаковой промежуточной модой К трехосного гирометра, показанного на фиг.1а, при помощи примера изменения лазерной мощности, излучаемой резонатором Х, в зависимости от суммы двух командных напряжений, от которых она зависит, то есть VD+VB. Первым свойством является то, что все три резонатора остаются на максимуме коэффициента усиления, если все пьезоэлектрические напряжения изменяются на половину промежуточной моды К/2. Это первое свойство показано на фиг.4 для резонатора Х. Вторым свойством является то, что все три резонатора остаются на максимуме коэффициента усиления, когда только одно из пьезоэлектрических командных напряжений изменяется на полную промежуточную моду К. Это второе свойство показано на фиг.5 для резонатора Х.
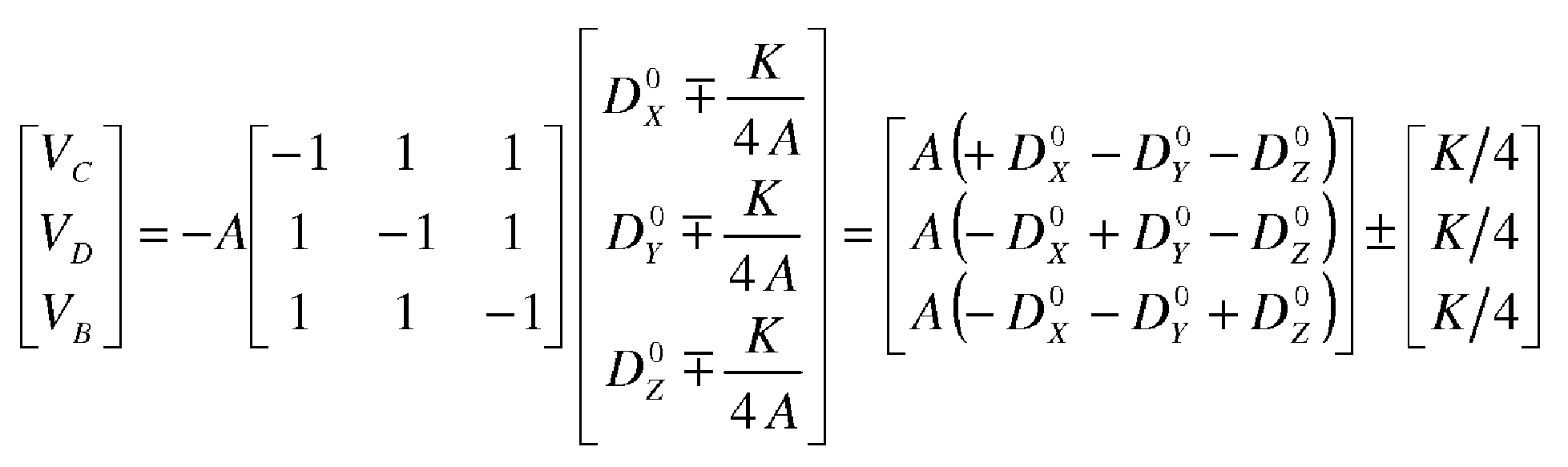
Изобретением предлагается изменять генерирование сигнала, который управляет перемещением подвижных зеркал, при запуске трехосного лазерного гирометра таким образом, чтобы получить команду смещения, программируемую и независимую от автономного устройства ALC. Следует отметить, что изобретение можно применять также для любого устройства, содержащего кольцевые оптические резонаторы, учитывая, что мощность световых волн, проходящих через упомянутые оптические резонаторы, зависит от положения подвижных зеркал. Лазерный гирометр приведен только в качестве примера. Изобретением предлагается также получение данных в цепи управления зеркалами таким образом, чтобы иметь возможность отслеживать их положение, когда работает система автоматического регулирования. Для оценки температуры гирометра можно применять температурный датчик, например, такой как термистор или термопара. Принцип изобретения основан на управлении командами, следуя линейно нарастающей функции или более сложному профилю для обнаружения максимумов мощности одновременно на трех лазерных резонаторах таким образом, чтобы впоследствии иметь возможность позиционировать одновременно три подвижных зеркала в положениях, которые наиболее удовлетворяют выбранным критериям работы. Например, в случае гирометра, показанного на фиг.1а, управление зеркалами по уравнению 4 можно изменить путем включения команд смещения DX, DY и DZ согласно следующему уравнению 5:
|
Значения IX, IY и IZ можно аннулировать искусственно, и командами DX, DY и DZ может управлять программа. Устройство располагает дискретными величинами IX, IY и IZ и может их отслеживать. При предыдущей команде, где входные значения IX, IY и IZ искусственно аннулированы, сигналы управления подвижными зеркалами VB, VC и VD можно выразить в зависимости от программных команд DX, DY и DZ:
|
Изменение команд DX, DY и DZ позволяет получить управление подвижными зеркалами (по линейно возрастающей функции или по более сложному профилю) и одновременно сканировать каждый из трех резонаторов, по меньшей мере, на одной моде. Для каждого значения команд смещения можно определить лазерные мощности, излучаемые тремя резонаторами. При этом значения  ,
,  и
и  , при которых излучаемые интенсивности являются максимальными соответственно для резонаторов X, Y и Z, сохраняют в памяти. После сканирования достаточно придать командам смещения сохраненные в памяти значения
,
и
, чтобы позиционировать три подвижных зеркала как можно ближе к максимумам мощности одновременно для трех резонаторов. Уравнение 7 дает конечные значения
, при которых излучаемые интенсивности являются максимальными соответственно для резонаторов X, Y и Z, сохраняют в памяти. После сканирования достаточно придать командам смещения сохраненные в памяти значения
,
и
, чтобы позиционировать три подвижных зеркала как можно ближе к максимумам мощности одновременно для трех резонаторов. Уравнение 7 дает конечные значения  ,
,  ,
,  , полученные для команд управления зеркалами:
, полученные для команд управления зеркалами:
|
И, наоборот, в этом примере, значения программных команд DX, DY и DZ, генерируемых для получения значений VB, VC и VD команд поступательного движения, можно выразить следующим образом:
|
Этот пример не ограничивает методику управления подвижными зеркалами. Подходит любой способ, соответствующий биекции между командой смещения и командой, принимаемой зеркалами: достаточно иметь возможность запрограммировать независимое сканирование для каждого зеркала, чтобы затем каждое из них поместить в конечное вычисленное положение. Ниже приведен второй пример изменения управления при помощи команд смещения  ,
,  и
и  , который обеспечивает последовательность сканирования зеркал и дальнейшее дифференцированное позиционирование для каждого из них:
, который обеспечивает последовательность сканирования зеркал и дальнейшее дифференцированное позиционирование для каждого из них:
|
с возможностью искусственного аннулирования значений IX, IY и IZ и управления командами  ,
и
,
и  при помощи программы.
при помощи программы.
Изобретение предусматривает также возможность определения положения зеркал, когда работает автономная система автоматического регулирования. В первом примере, представленном уравнением 5, команды управления зеркалами можно определить путем измерения генерируемых значений VB, VC и VD или на основании значений  , которые можно измерить отдельно или которые известны напрямую в случае операций, осуществляемых компьютерной программой. В случае второго примера команд управления подвижными зеркалами, представленного уравнением 9, команды управления зеркалами можно тоже определить путем измерения генерируемых значений VB, VC и VD. Их можно также определить на основании значений IX, IY и IZ, а также
,
и
, измеренных отдельно или известных напрямую в случае операций, производимых программой. Величину А можно представить как известную константу или ее можно извлечь, например, из таблицы соответствия значений А и значений температуры. Первоначальное сканирование не ограничивается линейно возрастающей функцией, и может иметь более сложную форму, чтобы улучшить позиционирование с точки зрения точности, повторяемости или быстроты. Конечное позиционирование подвижных зеркал можно произвести, используя несколько возможностей улучшения позиционирования, чтобы учитывать особенности каждого зеркала и влиять на их поведение или компенсировать некоторые эффекты.
, которые можно измерить отдельно или которые известны напрямую в случае операций, осуществляемых компьютерной программой. В случае второго примера команд управления подвижными зеркалами, представленного уравнением 9, команды управления зеркалами можно тоже определить путем измерения генерируемых значений VB, VC и VD. Их можно также определить на основании значений IX, IY и IZ, а также
,
и
, измеренных отдельно или известных напрямую в случае операций, производимых программой. Величину А можно представить как известную константу или ее можно извлечь, например, из таблицы соответствия значений А и значений температуры. Первоначальное сканирование не ограничивается линейно возрастающей функцией, и может иметь более сложную форму, чтобы улучшить позиционирование с точки зрения точности, повторяемости или быстроты. Конечное позиционирование подвижных зеркал можно произвести, используя несколько возможностей улучшения позиционирования, чтобы учитывать особенности каждого зеркала и влиять на их поведение или компенсировать некоторые эффекты.
Возможная конфигурация соответствует случаю, когда три подвижных зеркала В, С и D могут иметь одинаковую промежуточную моду K=KB=KC=KD. Речь идет о возможности получения сканирования трех зеркал в одинаковом диапазоне, чтобы их позиционировать тоже в одинаковом интервале и ближе всего к максимуму интенсивности трех резонаторов. Для сканирования выбранной моды лазерного резонатора достаточно применить к одному из двух зеркал изменение его команды на значение К, например, сканирование команды на ±К/2 вокруг среднего значения. Сканируя одновременно два подвижных зеркала этого резонатора, достаточно применить для каждого из них изменение ±К/4. Таким образом, одновременное сканирование трех подвижных зеркал с изменением на ±К/4 вокруг среднего значения позволяет сканировать по одной моде три резонатора трехосного лазерного гирометра.
В первом представленном примере управления зеркалами уравнение 8 показывает, что три подвижных зеркала осуществляют сканирование по ±К/4, то есть  , если команды DX, DY и DZ исследуют интервалы, заданные следующим уравнением 10:
, если команды DX, DY и DZ исследуют интервалы, заданные следующим уравнением 10:
|
Достаточно сохранить в памяти значения команд
,
и
, при которых соответствующие интенсивности резонаторов X, Y и Z являются максимальными. Конечные значения команд управления подвижными зеркалами
,
,
, при которых три резонатора одновременно приближаются к своему максимуму, получают при помощи следующего уравнения 11:
|

Уравнения 10 и 11 позволяют определить интервалы, в которых оказываются команды
,
,
, что выражается уравнением 12:
|
Вычисленные команды для одновременного приведения трех резонаторов близко к их максимуму интенсивности автоматически оказываются в интервале, сосредоточенном вокруг того же значения  , что и во время сканирования, но с большей амплитудой ±3К/4. Для второго примера управления уравнение приводит к такому же результату.
, что и во время сканирования, но с большей амплитудой ±3К/4. Для второго примера управления уравнение приводит к такому же результату.
В конечном счете, выбрав управление командами в одном и том же интервале, получают одновременное сканирование подвижных зеркал в идентичном интервале  и после этого их позиционируют в одном интервале
и после этого их позиционируют в одном интервале  при
при  . Точность конечного позиционирования определяется компромиссом между уменьшением шага сканирования, уровнем шума в измерениях мощности и числом повторений сбора данных в каждой точке. Это управление подвижными зеркалами улучшает определение первоначального позиционирования подвижных зеркал: последовательность и управление обеспечивают быстрое и надежное позиционирование на максимуме лазерного коэффициента усиления одновременно для трех резонаторов.
. Точность конечного позиционирования определяется компромиссом между уменьшением шага сканирования, уровнем шума в измерениях мощности и числом повторений сбора данных в каждой точке. Это управление подвижными зеркалами улучшает определение первоначального позиционирования подвижных зеркал: последовательность и управление обеспечивают быстрое и надежное позиционирование на максимуме лазерного коэффициента усиления одновременно для трех резонаторов.
Опять-таки в случае, когда три подвижных зеркала В, С и D имеют одинаковую промежуточную моду, показав, как можно получить сканирование трех зеркал в одинаковом диапазоне для их позиционирования в идентичном интервале и как можно ближе к максимуму интенсивности трех резонаторов, далее можно показать, как можно получить сканирование и позиционирование в интервале, характерном для каждого подвижного зеркала, приводя одновременно три резонатора как можно ближе к максимуму интенсивности.
В первом примере уравнение 6 показывает, что, выбрав диапазоны, исследуемые командами  при
при  , интервалы, сканируемые подвижными зеркалами, можно дифференцировать согласно следующему уравнению 13:
, интервалы, сканируемые подвижными зеркалами, можно дифференцировать согласно следующему уравнению 13:
|
При этом зеркала сканируют диапазоны, сосредоточенные вокруг отдельных значений  ,
,  ,
,  , полученных при помощи
, полученных при помощи
но с одинаковой амплитудой ±К/4. Как и в предыдущем случае, после этого достаточно сохранить в памяти значения команд
,
и
, при которых соответствующие интенсивности резонаторов X, Y и Z являются максимальными. Конечные значения команд управления подвижными зеркалами
,
,
, при которых три резонатора одновременно находятся близко к своему максимуму, как и в предыдущем случае, соответствуют:
Уравнение 12 показывает, что команды
,
и
, приводящие одновременно три резонатора близко к их максимуму интенсивности, автоматически приводят подвижные зеркала в интервал, сосредоточенный вокруг того же значения, что и при сканировании, сосредоточенном на
,
,
, но с большей амплитудой ±3К/4. Второй пример команд управления подвижными зеркалами приводит к такому же результату через уравнение 9.
В конечном счете, при выборе управления командами в разных интервалах подвижные зеркала могут одновременно сканировать отдельные диапазоны
, после чего их одновременно позиционируют в собственных интервалах
при
.
Точность конечного позиционирования тоже определяется компромиссом между шагом сканирования, точность которого может увеличиваться с увеличением числа точек дискретизации при сканировании, уровнем шума в измерениях мощности и числом повторений сбора данных в каждой точке. Действительно, повторение сбора данных в одной и той же точке позволяет снизить влияние шума, но увеличивает общую продолжительность сканирования. Это управление подвижными зеркалами улучшает определение позиционирования подвижных зеркал: последовательность и управление позволяют получить быстрое и надежное позиционирование, персонифицируемое в зависимости от подвижного зеркала, на максимуме лазерного коэффициента усиления одновременно для трех резонаторов. Выбор диапазонов сканирования и позиционирования в зависимости от первоначальной температуры позволяет предугадать изменения поведения подвижных зеркал.
Опять-таки для случая, когда три подвижных зеркала В, С и D имеют одинаковую промежуточную моду, показав, как можно получить сканирование трех подвижных зеркал в идентичных или характерных для каждого из них интервалах, помещая их одновременно как можно ближе к максимуму интенсивности их резонатора и затем управляя ими в интервалах ±3К/4 вокруг среднего значения
, теперь можно показать, как можно сократить эти области до диапазона ±К/2. Исследование трехосных резонаторов показывает, что при достижении одного командного напряжения в конце диапазона два других командных напряжения оказываются с противоположной стороны. Это свойство позиционирования максимумов для трехосных резонаторов представлено в случае зеркала В при помощи двух следующих утверждений:
Путем круговой перестановки между зеркалами можно получить четыре других эквивалентных утверждения.
Изобретением предлагается также использовать первое свойство трехосных лазерных резонаторов, показанное на фиг.4, для смещения всех команд управления зеркалами при сохранении резонаторов вблизи максимума коэффициента усиления. Смещая зеркало в конце диапазона на половину промежуточной моды, чтобы привести его к срединному значению, и компенсируя команду двух других на половину промежуточной моды в противоположном направлении, два резонатора сохраняют на одной и той же моде, а третий перескакивает одну моду. Таким образом, каждая из следующих операций позволяет повторно центрировать команды, сохраняя два резонатора на одной моде и применив скачок моды для третьего, согласно таблице 1:
|
После вычисления команд управления зеркалами в интервале ±3К/4 в конце сканирования и когда одно из значений выходит из интервала ±К/2, предлагаемое изменение команд позволяет повторно определить значения в интервале ±К/2, при этом указанные значения приводят одновременно три резонатора как можно ближе к их максимальному коэффициенту усиления.
Изобретением предлагается также использовать второе свойство трехосных лазерных резонаторов, показанное на фиг.5, для смещения команды только одного зеркала при сохранении всех резонаторов вблизи максимума коэффициента усиления. Смещая зеркало в конце диапазона на полную промежуточную моду, его приводят к срединному значению интервала. Таким образом, каждая из следующих операций позволяет смещать команду зеркала, сохраняя один резонатор на одной и той же моде и применив скачок моды для двух других, согласно таблице 2:
|
После вычисления команд управления зеркалами в интервале ±3К/4 в конце сканирования и когда одно из значений выходит из интервала ±К/2, предлагаемое изменение команды позволяет опять определить значения с той же стороны интервала.
Наконец, после сканирования зеркал и определения команд, приводящих одновременно три лазерных резонатора как можно ближе к максимальному коэффициенту усиления, вышеуказанные операции позволяют сократить область возможных значений. Эти изменения позволяют улучшить поведение за счет уменьшения механических напряжений в компонентах подвижных зеркал, таких как деформирующиеся диски или клееные швы, и, следовательно, повысить надежность узла, образующего подвижное зеркало.
Показав, как можно, когда три подвижных зеркала имеют одинаковую промежуточную моду, сканировать их положения для их позиционирования в характерных для каждого из них интервалах, помещая их одновременно как можно ближе к максимуму интенсивности трех резонаторов, при этом в конечном счете подвижными зеркалами управляют в интервалах одинаковых амплитуд ±3К/4 вокруг характерного для каждого из них среднего значения
, теперь можно рассмотреть случай, когда подвижные зеркала В, С и D имеют разные промежуточные моды, обозначаемые КВ, КС и KD. Можно получить сканирование подвижных зеркал в интервалах с центрами и с амплитудами, характерными для каждого зеркала, и позиционировать их затем как можно ближе к максимальному коэффициенту усиления. Каждый резонатор X, Y и Z можно тоже сканировать по полной моде, если три подвижных зеркала одновременно перемещают на ±KB,C,D/4 соответственно, согласно уравнению  . Уравнение 10 уже применить нельзя, но уравнение 8 показывает, что эти сканирования можно получить, когда команды смещения DX, DY и DZ исследуют следующие интервалы 14:
. Уравнение 10 уже применить нельзя, но уравнение 8 показывает, что эти сканирования можно получить, когда команды смещения DX, DY и DZ исследуют следующие интервалы 14:
|
где KX, KY и KZ получают из следующих уравнений 15:
|
Обозначив  , можно получить
, можно получить  . Во время сканирования достаточно ввести в память значения команд
,
и
, при которых интенсивности резонаторов X, Y и Z являются максимальными. Конечные значения команд подвижных зеркал
,
,
, при которых три резонатора будут одновременно находиться вблизи своего максимума, получают из следующих уравнений 16:
. Во время сканирования достаточно ввести в память значения команд
,
и
, при которых интенсивности резонаторов X, Y и Z являются максимальными. Конечные значения команд подвижных зеркал
,
,
, при которых три резонатора будут одновременно находиться вблизи своего максимума, получают из следующих уравнений 16:
|
Значения команд зеркал, приводящие одновременно три резонатора близко к максимальному коэффициенту усиления, оказываются, таким образом, автоматически в интервалах, центры которых
,
,
характерны для зеркала, но с одинаковой амплитудой  , вычисленной по среднему значению промежуточных мод трех зеркал. Пример управления подвижными зеркалами, представленный уравнением 9, приводит к тем же результатам. Таким образом, командами можно управлять в интервалах с разными центрами и амплитудами, и затем подвижные зеркала позиционируют одновременно в собственных интервалах с разными центрами, но одинаковой ширины. Этот метод не позволяет уменьшить диапазон решения для зеркала с наименьшей промежуточной модой. Поэтому можно осуществить процедуру повторного центрирования, чтобы привести команды зеркал в диапазон с амплитудой, равной их промежуточной моде.
, вычисленной по среднему значению промежуточных мод трех зеркал. Пример управления подвижными зеркалами, представленный уравнением 9, приводит к тем же результатам. Таким образом, командами можно управлять в интервалах с разными центрами и амплитудами, и затем подвижные зеркала позиционируют одновременно в собственных интервалах с разными центрами, но одинаковой ширины. Этот метод не позволяет уменьшить диапазон решения для зеркала с наименьшей промежуточной модой. Поэтому можно осуществить процедуру повторного центрирования, чтобы привести команды зеркал в диапазон с амплитудой, равной их промежуточной моде.
Выше было показано, что, если три подвижных зеркала имеют одинаковую промежуточную моду, их можно позиционировать одновременно как можно ближе к максимуму интенсивности трех резонаторов в диапазонах, которые можно свести к амплитуде ±К/2. Теперь можно рассмотреть случай, когда три подвижных зеркала имеют разные промежуточные моды. Уже было показано, что в этом случае подвижные зеркала одновременно позиционируют в интервалах с разными центрами, но с одинаковой амплитудой  . Можно показать, что можно уменьшить область конечного позиционирования каждого зеркала с учетом его собственной промежуточной моды. Управление зеркалами по одному или другому из двух представленных примеров приводит к изменению свойства позиционирования максимумов. Когда достигнуто командное напряжение в конце диапазона, два других командных напряжения оказываются смещенными в направлении противоположной стороны. Это свойство позиционирования максимумов для трехосных резонаторов с разными промежуточными модами представлено в случае зеркала В двумя следующими утверждениями:
. Можно показать, что можно уменьшить область конечного позиционирования каждого зеркала с учетом его собственной промежуточной моды. Управление зеркалами по одному или другому из двух представленных примеров приводит к изменению свойства позиционирования максимумов. Когда достигнуто командное напряжение в конце диапазона, два других командных напряжения оказываются смещенными в направлении противоположной стороны. Это свойство позиционирования максимумов для трехосных резонаторов с разными промежуточными модами представлено в случае зеркала В двумя следующими утверждениями:
Путем круговой перестановки между зеркалами можно получить четыре других эквивалентных утверждения. Таким образом, команда, такая как  стремится сместить к нижней стороне диапазона значения
и
, которые, как минимум, могут выходить за пределы
и
. Поэтому можно произвести повторное центрирование, чтобы уменьшить команду
на половину промежуточной моды КВ/2 и увеличить две другие команды на половину их собственной промежуточной моды. Эти операции могут привести к тому, что команды VC и VD слегка выходят из интервала
стремится сместить к нижней стороне диапазона значения
и
, которые, как минимум, могут выходить за пределы
и
. Поэтому можно произвести повторное центрирование, чтобы уменьшить команду
на половину промежуточной моды КВ/2 и увеличить две другие команды на половину их собственной промежуточной моды. Эти операции могут привести к тому, что команды VC и VD слегка выходят из интервала  , но они позволяют сократить область конечного позиционирования каждого зеркала с учетом его собственной промежуточной моды. Таким образом, предложенная последовательность управления позволяет учитывать динамическое поведение каждого из подвижных зеркал.
, но они позволяют сократить область конечного позиционирования каждого зеркала с учетом его собственной промежуточной моды. Таким образом, предложенная последовательность управления позволяет учитывать динамическое поведение каждого из подвижных зеркал.
Таким образом, для зеркал с различными промежуточными модами можно получить сканирование в интервалах с центрами и амплитудами, характерными для каждого из них, и затем позиционировать их одновременно как можно ближе к максимуму коэффициента усиления. Однако этот метод не позволяет сократить диапазон решения для зеркала с меньшей промежуточной модой. В случае резонатора, зеркала которого имеют разные промежуточные моды, наибольшее из значений можно характеризовать заранее. Сканируя три подвижных зеркала по соответствующей амплитуде, можно с уверенностью сказать, что каждый резонатор проходит через максимальный коэффициент усиления, который можно выявить.
Настоящее изобретение позволяет также учитывать термическое поведение каждого из подвижных зеркал во время их позиционирования при запуске гирометра. После запуска гирометра окружающая среда, в которой его используют, может внести существенные термические изменения. Под действием этих температурных изменений оптический блок, а также механические элементы крепления деформируются и приводят к изменению оптических длин лазерных резонаторов. Автономная электроника автоматического регулирования поддерживает периметры резонаторов постоянными и на максимуме коэффициента усиления, корректируя значения команд управления подвижными зеркалами. В дальнейшем «термическим поведением» подвижного зеркала будет называться изменение его команды, связанное с автономным автоматическим регулированием, когда гирометр продолжает работать и подвергается термическому изменению, равному его полной области использования. На фиг.6 при помощи графика показаны наблюдаемые изменения команды зеркал В, С и D в зависимости от положительного термического градиента. Зеркало В подвергается большому положительному изменению: его команда в целом возрастает с возможным общим максимумом ниже максимальной температуры. Зеркало D характеризуется большим отрицательным изменением: его команда в целом уменьшается с возможным минимумом ниже максимальной температуры. Зеркало С претерпевает слабое изменение: его команда достигает предела в середине температурного диапазона, который может быть как максимумом, как показано на фиг.6, так и минимумом. В конечном счете, во время термических колебаний люфт в напряжениях между механическими элементами крепления, блоком и его компонентами, в частности, самими подвижными зеркалами приводит к изменению команд, которые, тем не менее, должны оставаться в области своей достоверности, чтобы работало автоматическое регулирование. В частности, изобретение позволяет использовать информацию от температурного датчика, чтобы адаптировать диапазон сканирования и позиционирования каждого подвижного зеркала в ходе последовательности. Предварительная характеристика позволяет оценить термическое поведение каждого зеркала. При этом можно определить температурные пороги либо за счет компромисса между характеристиками зеркал, либо за счет более общего компромисса вокруг гирометра, и эти пороговые значения можно сохранить в таблицах. После этого для каждого зеркала и для каждого температурного порога запуска можно определить возможное положительное изменение ΔVpos на его команде и отрицательное изменение ΔVneg. Можно выбрать возможный диапазон позиционирования каждого зеркала, выбрав его центр таким образом, чтобы он оставался в области нормальной работы автоматического регулирования. Таким образом, изобретение позволяет учитывать термическое и динамическое поведение каждого из подвижных зеркал. Изобретение позволяет также ориентировать и перемещать каждое из зеркал. Диапазон позиционирования можно выбрать таким образом, чтобы получать такую команду, при которой механизм поступательного движения чаще толкает зеркало, а не тянет его. Устройство позволяет также обеспечивать работу с тяговым усилием или работу, сконцентрированную вокруг заранее определенного значения. Изобретение позволяет также уменьшить общее изменение команд во время работы и, следовательно, уменьшить требуемую область команды. В случае, когда зеркала управляются по напряжению, изобретение позволяет отказаться от использования высоких напряжений и избежать скачков мод во время работы после последовательности запуска.
Предлагаемое изобретение позволяет также учитывать явление гистерезиса при позиционировании подвижных зеркал и уменьшить его влияние. Описанные выше последовательности позиционирования предполагают повторяемость перемещения зеркал при помощи команды их управления. При данном значении команды VB, VC или VD зеркала всегда смещаются геометрически на одну и ту же величину LB, LC или LD, согласно уравнению 1. Среди элементов, образующих зеркала, можно использовать материалы, имеющие механический гистерезис. В этом случае движение зеркала уже не будет линейным с его командой и его реагирование имеет характеристику типа показанной на фиг.7. В последовательностях, показанных на фиг.7, на выходе первой линейно возрастающей функции сканирования RB зеркалами управляют в направлении положения с максимальным коэффициентом усиления, например, отводя зеркало назад перемещением РМ позиционирования зеркала. Гистерезис реагирования вводит отклонение Е позиционирования между искомым положением и положением, реально достигаемым зеркалами в конце их перемещений. Совокупность этих отклонений между зеркалами трех резонаторов может привести к позиционированию лазерных резонаторов намного дальше от предусмотренных максимумов коэффициента усиления. Предварительно исследовав диапазон команды перед осуществлением сканирования, во время которого определяют и сравнивают мощности, можно уменьшить явление гистерезиса, как показано на фиг.8 и 9.
На фиг.8 показан случай, когда линейная функция возрастает с положительным средним значением. Предварительное исследование предусмотренного диапазона при помощи перемещений DP1 и DP2 позволяет уменьшить гистерезис подвижного зеркала до отклонения позиционирования E'. Предварительное сканирование можно осуществить, проходя диапазон только в одном направлении с последующим повышением или понижением линейной функции. Отклонение позиционирования уменьшается в два раза. Диапазон может также быть пройден за полный проход в одном и обратном направлении с последующим повышением или понижением линейной функции. Отклонение позиционирования уменьшается в три-четыре раза. Для уменьшения отклонения ниже искомой величины можно произвести несколько проходов в одном и другом направлениях. Таким образом, предложенное изобретение позволяет учитывать явление гистерезиса при позиционировании подвижных зеркал и уменьшить его влияние.
Показав, как предварительное линейное перемещение в диапазоне сканирования может позволить уменьшить отклонение между задаваемым положением и положением, реально достигаемым в диапазоне позиционирования в интервале ±λ/4 по отношению к срединным значениям повторного позиционирования, теперь можно показать, что гистерезис можно еще больше уменьшить при помощи более сложной последовательности. Чтобы улучшить воспроизводимость по всему диапазону конечного позиционирования, последовательность следует начать с предварительного сканирования, охватывающего предельные значения этого диапазона, заключенного в ±λ/2 по отношению к срединным значениям повторного позиционирования. Например, команды зеркал могут следовать линейной функции до максимального значения, достигаемого при повторном позиционировании, затем вернуться к минимуму, то есть при колебании ±λ/2. После этого можно исследовать диапазон сканирования по ±λ/4, например, следуя линейно возрастающей функции. После сканирования повторное позиционирование может иметь еще лучшую воспроизводимость, если его первоначальное состояние сравнимо с состоянием до сканирования. Перед подачей команды на повторное позиционирование зеркалами можно опять управлять согласно последовательности, сравнимой с последовательностью предварительного сканирования, чтобы привести их к исходному значению предварительного сканирования. Например, в случае, когда линейная функция является возрастающей с положительным средним значением, последовательность может быть последовательностью, показанной на фиг.9, чтобы оптимизировать цикл уменьшения гистерезиса. Перемещение DP'1 реализует предварительное сканирование в одном направлении до конца полного диапазона, то есть на ±λ/2. Перемещение DP'2 реализует обратное предварительное сканирование до начала полного диапазона. Перемещение DP'3 реализует позиционирование на начало полного диапазона. Перемещение DP'4 реализует сканирование на ±λ/4. Перемещение DP'5 реализует позиционирование на конец диапазона полного позиционирования. Перемещение DP'6 реализует возвращение к началу этого диапазона. После этого подвижные зеркала готовы принимать свою конечную команду при уменьшенном отклонении позиционирования за счет того, что схождение и функция измерения используют одну и ту же сторону цикла гистерезиса.
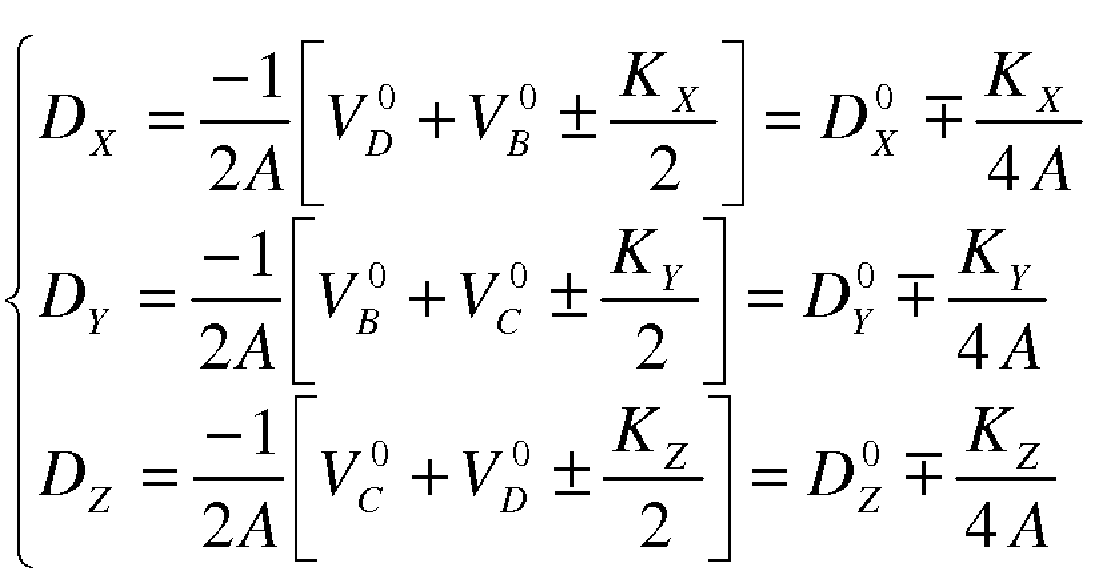
Таким образом, при запуске гирометра изобретение позволяет позиционировать одновременно три подвижных зеркала как можно ближе к максимальному коэффициенту усиления трех резонаторов, независимо от их промежуточных мод, в выбранных интервалах амплитуд и с требуемой точностью. После завершения позиционирования можно запустить автономное автоматическое регулирование длины резонатора. За счет своей собственной константы времени схождения оно позволяет приводить резонаторы более точно к их максимуму интенсивности и поддерживать их на этом максимуме. Теперь можно показать, что по завершении времени схождения при помощи автономного автоматического регулирования можно произвести тест, чтобы проверить нормальный ход описанных выше последовательностей в соответствии с настоящим изобретением. В конце автоматического обеспечения схождения можно снять показания команд зеркал и сравнить их с предусмотренным диапазоном. Отклонение между положением каждого зеркала и центром его диапазона позиционирования можно вычислить. Обычно эти отклонения не должны превышать половины промежуточной моды зеркала. Однако шумы при измерениях, колебания промежуточной моды по температуре и старение могут привести к увеличению этого значения дополнительного допустимого предела. Например, в случае управления зеркалами, представленного уравнением 5, с возможностью дискретизации значений IX, IY и IZ и управления командами DX, DY и DZ при помощи компьютерной программы команды управления зеркалами можно определить при помощи уравнения
Как было указано выше, срединные команды
,
,
, соответствующие центру диапазонов, можно определить при помощи уравнения
Отклонение между командами VB, VC и VD и центром их соответствующего диапазона можно определить при помощи

Обычно абсолютное значение этих отклонений не превышает половины самой большой промежуточной моды зеркал ΔК/2. При применении дополнительного допустимого предела ms и обозначив ΔK'=ΔK/A и ΔB,C,D=ΔVB,C,D/A проверка нижеследующих отношений 17 позволяет подтвердить, что рабочая точка, найденная во время этого теста, соответствует точке, полученной в результате процедур сканирования, повторного центрирования и предварительного позиционирования в соответствии с настоящим изобретением:
|

В противном случае, если одно из отклонений переходит за условленный предел, можно осуществить повторное центрирование или констатировать неисправность. Можно также обусловить, что несоответствие с этим тестом не указывает на неисправность, и запуск гирометра можно продолжить с сохранением в памяти результатов теста.
Основным преимуществом представленного изобретения является то, что оно позволяет избегать проблемы конкуренции мод. Кроме того, не прибегая больше к подразумеваемой гипотезе аналогичного поведения зеркал в зависимости от температуры, настоящее изобретение обеспечивает гораздо большую толерантность к различиям поведения между зеркалами. Следовательно, можно меньше отбраковывать зеркал в конце процесса изготовления. При этом получают существенный выигрыш в стоимости.
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Устройство и способ контроля целостности в реальном времени спутниковой навигационной системы
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Распределенная архитектура для радионавигационного оборудования
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки

