Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ СИГНАЛОВ, ПОДЛЕЖАЩИХ СУММИРОВАНИЮ, СРЕДИ МНОЖЕСТВА ПРИНЯТЫХ СИГНАЛОВ
Вид РИД
Изобретение
Данное изобретение относится к области получения оптических изображений. Это применяется, в частности, к спутникам, для которых получение изображения выполняется посредством оптического датчика, образованного посредством множества оптических детекторов, помещенных рядом и образующих некоторую матрицу.
В известном уровне техники известно, что использование выражения «пиксел» обозначает элемент информации, характерный для части изображения, принятого от одного из этих детекторов.
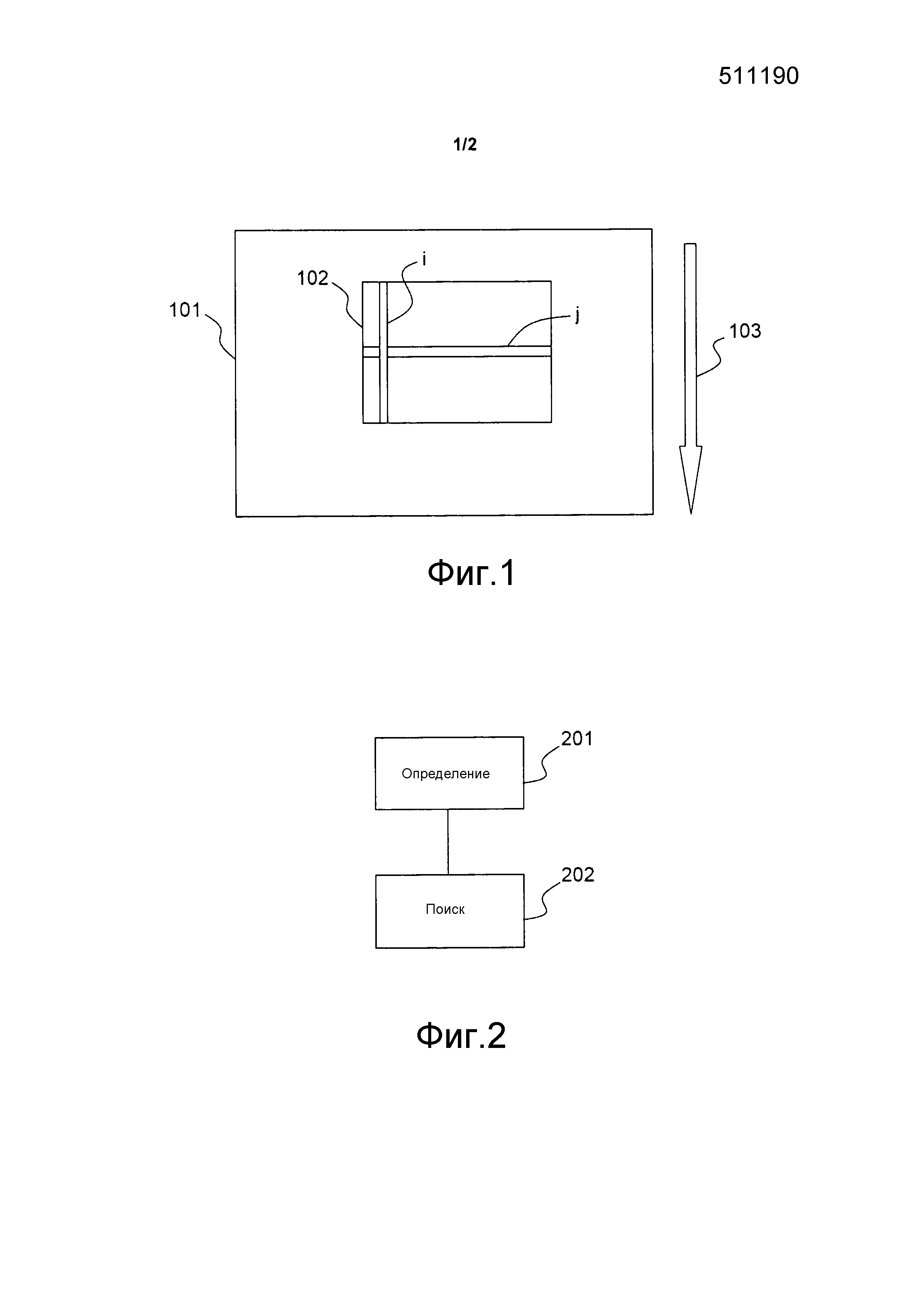
В контексте данного изобретения, более конкретно, рассматриваются системы, известные как «веерные» (“push-broom”) системы. В этих системах, представленных на фиг.1, изображение 101, получаемое датчиком 102, прокручивается в известном направлении с известной скоростью 103. Эта прокрутка изображения вызывается, например, перемещением спутника. Каждый оптический детектор принадлежит к столбцу, обозначенному через i, и строке, обозначенной через j. Из-за перемещения изображения, часть изображения последовательно просматривается детекторами одного и того же столбца i. Устройство обработки обеспечивает суммирование, для каждого столбца, информации, принятой от различных строк и согласно заданному времени суммирования. Также в известном уровне техники известно использование термина «интеграция» для этой суммы. Эта функциональность также известна как TDI (интеграция временной задержки).
Известны системы оптического получения данных, для которых этот датчик использует технологию изготовления CCD (прибора с зарядовой связью). Однако эти системы оптического получения данных не предусматривают варьирование числа строк, используемых для выполнения этого суммирования как функции местоположения этого столбца в матрице, имеющей TDI функциональность. Кроме того, системы оптического получения данных, использующие эту технологию изготовления, не предусматривают точного учета вариаций и искажений, присутствующих, в частности, на линзах, помещенных перед оптическим датчиком. Фактически, с этой технологией число суммируемых строк является идентичным для всех столбцов матрицы, имеющей TDI функциональность, и не учитывает вариации качества изображения по длине этих детекторов.
Также известны системы оптического получения данных, для которых этот датчик использует технологию изготовления CMOS (комплементарная (структура) металл-оксид-полупроводник). Известен выбор времени суммирования из элемента информации, характерного для яркости, принятой детектором первой строки, причем это осуществляется для максимизации качества полученного изображения. Если информация, принятая от детектора первой строки, не является характерной для информации, принятой от других детекторов этого изображения, то это определение, следовательно, не является хорошим для оставшейся части изображения. Также известно определение времени суммирования для максимизации функции, составленной из пары, образованной модуляционной передаточной функцией, или MTF, и отношением «сигнал-шум», или SNR, для данного опорного значения яркости. Модуляционная передаточная функция, или MTF, описывает ясность изображения, а отношение «сигнал-шум» описывает шум изображения. Однако, так как это определение выполняется на заводе от детектора системы оптического получения данных, соответствующей среднему или минимальному качеству изображения на этом детекторе, передача от этой оптической системы, а следовательно, SNR и MTF, изменяется вдоль этого детектора. Это определение не обеспечивает приспособление к вариациям условий приема.
Данное изобретение, следовательно, нацелено на предложение альтернативного способа для определения времени суммирования, связанного с детектором.
С этой целью, предметом изобретения является способ для определения в реальном времени числа сигналов, подлежащих суммированию, среди множества сигналов, характерных для части изображения, которые, соответственно, приняты от множества детекторов, принадлежащих к одному и тому же оптическому датчику, причем упомянутые детекторы организованы в матрицу, образованную посредством строк и столбцов, причем упомянутые сигналы, подлежащие суммированию, приняты на одном и том же столбце. Этот способ также предусматривает определение времени, в течение которого упомянутые детекторы должны получить упомянутые сигналы, подлежащие суммированию.
Данный способ включает в себя этап определения значения, характерного для модуляционной передаточной функции и отношения «сигнал-шум», или SNR, некоторой части изображения, на основе местоположения одного из этих детекторов и на основе сигнала, характерного для части изображения, полученной от упомянутых детекторов. Это характерное значение зависит от этого числа. Этот способ также включает в себя этап поиска этого числа и времени, максимизирующего это характерное значение.
Этот способ, следовательно, обеспечивает получение значения числа сумм, обеспечивающего компромисс между ясностью изображения и конечного отношения «сигнал-шум» этого изображения.
Предпочтительно, это характерное значение получается посредством умножения модуляционной передаточной функции на отношение «сигнал-шум», связанное с этим изображением.
Предпочтительно, этот способ дополнительно включает в себя этап перемещения оптического датчика относительно изображения. Это перемещение выполняется в оси, для которой абсолютное значение угла между этой осью и столбцом оптического датчика является меньшим, чем некоторый порог. Этот этап определения является подходящим для определения этого характерного значения, кроме того, из скорости.
Этот порог имеет предпочтительное значение в 5°.
Предпочтительно, этот способ включает в себя этап запоминания этого числа и времени, связанного с местоположением этого детектора и со значением, характерным для сигнала, характерного для части изображения, полученной от этого детектора.
Предпочтительно, этот этап определения является подходящим для использования данных от системы управления угловой ориентацией и орбитой и/или от датчиков, передающих данные, характерные для оптического искажения по меньшей мере одной линзы и/или по меньшей мере одного зеркала, помещенного перед упомянутым оптическим датчиком, значения, характерного для модуляционной передаточной функции упомянутой линзы и/или упомянутого зеркала, управления спутником, на борту которого установлен упомянутый оптический датчик, и/или сопровождения упомянутых команд управления.
Предпочтительно, сигнал, характерный для части изображения получают, кроме того, по меньшей мере от одного другого оптического датчика, получающего упомянутый сигнал в другом частотном диапазоне и/или посредством использования другого шага получения данных.
Этот выбор частотного диапазона достигается посредством оптического фильтра, помещенного перед этим датчиком.
Другим предметом данного изобретения является система, включающая в себя по меньшей мере один оптический датчик, образованный посредством множества детекторов, и средство обработки, подходящее для реализации этого способа.
Данное изобретение будет лучше понято, и другие преимущества станут очевидными из чтения подробного описания вариантов осуществления, данных посредством примера в следующих чертежах:
Фиг.1 представляет систему оптического получения данных;
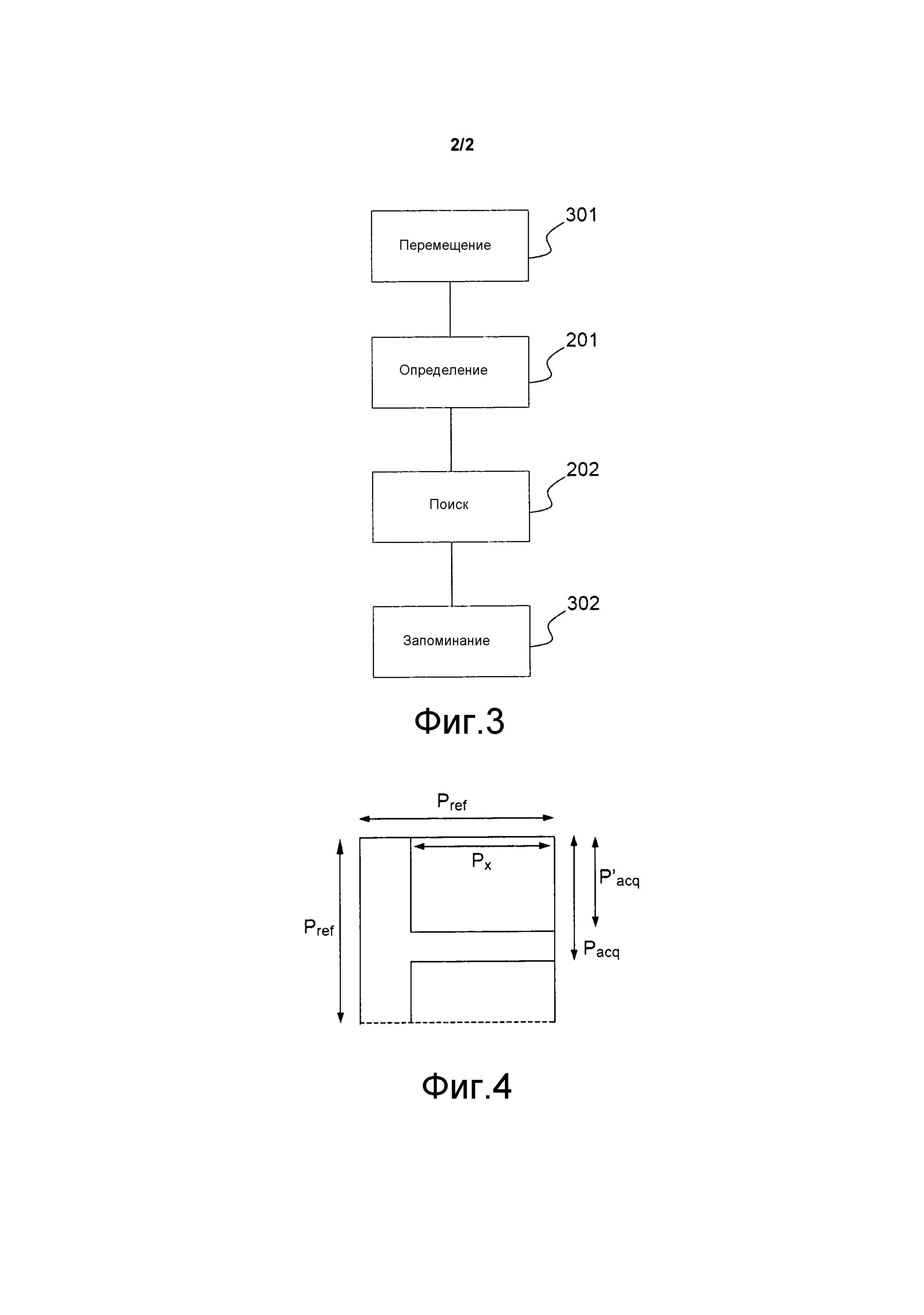
Фиг.2 представляет способ согласно первому аспекту данного изобретения;
Фиг.3 представляет способ согласно второму аспекту данного изобретения;
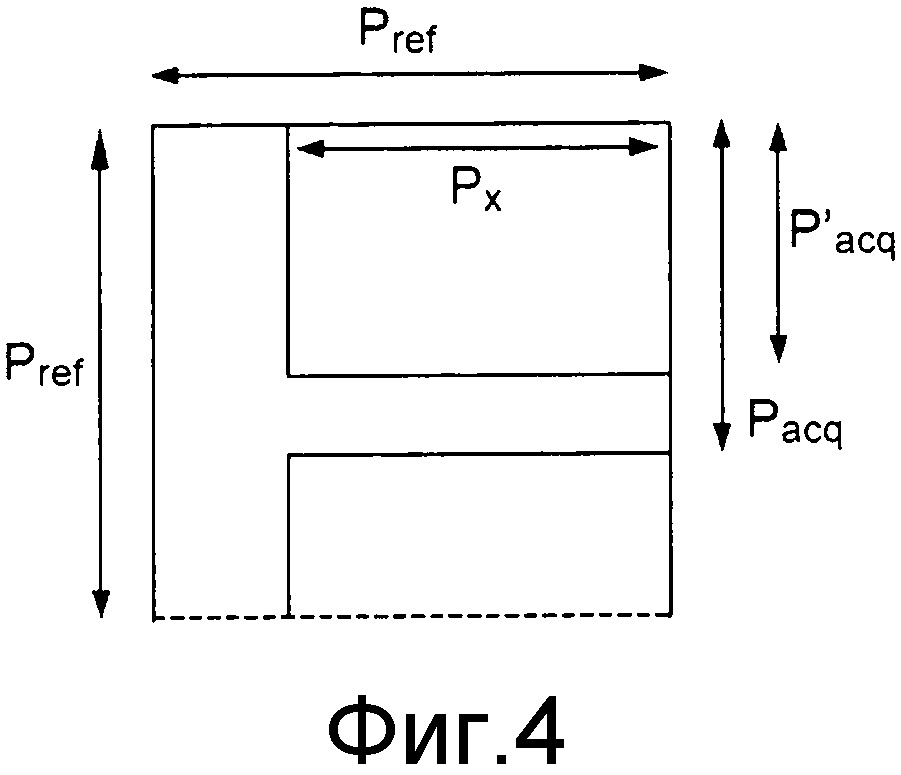
Фиг.4 представляет начало столбца CMOS детектора.
Этот способ, представленный на фиг.1, следовательно, обеспечивает определение параметра Kt(i), который зависит от числа сумм, согласно столбцу i датчика, имеющего TDI функциональность, от времени выборки и от времени интеграции для сцены на N(i)-N0 физических пикселов столбца I матрицы, имеющей TDI функциональность. N0 является числом первых строк, которые используются для оценки сигнала наблюдаемой части изображения. Время выборки получается посредством деления шага в направлении этих столбцов на скорость прокрутки этой сцены. Этот способ также обеспечивает определение параметра N(i), который представляет число строк, используемых для выполнения суммирования согласно столбцу i этого датчика. Фактически, для площади этой сцены, соответствующей поверхности пиксела прокрутки на столбце i этой матрицы, имеющей TDI функциональность, принятая освещенность предполагается идентичной на этом столбце, но изменяется в этой области. Kt(i) более точно задается как отношение между временем Tint интеграции, связанным со столбцом i, и временем Ts выборки для детектора столбца i этого датчика.
Выбор этих двух параметров Kt(i) и N(i) осуществляется для максимизации параметра, зависящего от модуляционной передаточной функции, или MTF, и от отношения «сигнал-шум», или SNR. Когда время интеграции или число строк, используемых для выполнения этой суммы, возрастает, отношение «сигнал-шум» увеличивается, а модуляционная передаточная функция уменьшается. Эта оптимизация достигается для каждого столбца физических пикселов матрицы, имеющей TDI функциональность, для датчика, обозначенного посредством i, номера столбца этого датчика, и j, номера строки этого изображения.
MTF составлена из части, зависящей от модуляционной передаточной функции по меньшей мере одной линзы и/или по меньшей мере одного зеркала, помещенного перед упомянутым оптическим датчиком, и части, зависящей от сигналов, подлежащих суммированию.
Другими словами, MTF не зависит от сигнала, который наблюдается (предполагается линейность первого порядка), но зависит следующим образом:
- MTF оптики зависит от всей оптики телескопа перед матрицей,
- MTF движения зависит от теоретического перемещения сцены относительно этой матрицы,
- MTF десинхронизации зависит от времени, прошедшего в столбце i матрицы, подлежащем суммированию, и, следовательно, от числа N(i) детекторов, подлежащих суммированию, в этом столбце и от фактического перемещения этой сцены.
Среди способов, используемых для выполнения этой оптимизации, могут использоваться несколько способов численного анализа, область поиска может быть также дискретизирована, значения функции, подлежащей оптимизации в этих точках, может быть вычислено, и из них может быть выведена аппроксимация оптимальных параметров.
Этот способ реализуется в устройстве обработки изображений. Это устройство подключено к оптическому датчику для приема элементов информации, характерных для изображения.
Обычно функция, которая зависит от SNR и от MTF, оптимизируется при ограничении, что SNR является большим, чем минимальное значение SNRmin, и что MTF находится между двумя минимальной и максимальной границами, что означает, что значения параметров Kt(i) и N(i) ограничены и должны принадлежать, соответственно, интервалу [Ktmin, Ktmax] и интервалу [Nmin, Nmax], где Nmin>N0. N0 является числом физических строк матрицы, имеющей TDI функциональность, используемой для оценки принятого сигнала, причем эта оценка принятого сигнала в столбце i матрицы, имеющей TDI функциональность, затем используется в вычислении SNR.
Способ, представленный на фиг.2, предусматривает два этапа. Этап 201 предназначен для определения значения, характерного для модуляционной передаточной функции и/или отношения «сигнал-шум» изображения. Это характерное значение получается для каждого детектора и зависит от местоположения этого детектора и от сигнала, характерного для части изображения, принятой от этого детектора. Это характерное значение также зависит от параметра Kt(i), который зависит от времени интеграции, времени, в течение которого физический пиксел i этого детектора получает фотоны, которые используются для оценки сигнала изображения, согласно столбцу i этого датчика, и от времени выборки этого сигнала изображения. Это значение также зависит от параметра N(i), которое представляет число физических строк, используемых для выполнения суммы согласно столбцу i этого датчика. Этот способ также предусматривает этап 202 для поиска значения параметра Kt(i) и/или параметра N(i), который максимизирует значение, характерное для модуляционной передаточной функции и/или отношения «сигнал-шум» изображения.
Способ, представленный на фиг.3, также включает в себя этап 301 для перемещения оптического датчика относительно изображения и этап 302 для запоминания суммы (более конкретно, параметра Kt(i) и/или параметра N(i)), связанной с местоположением этого детектора и со значением, характерным для сигнала, характерного для части изображения, полученной от этого детектора.
Значение MTF параметра для детектора столбца i зависит от значения параметров Kt(i) и N(i) и от параметров, известных в момент получения изображения, которые обусловлены оптическим искажением, влияние которого может быть вычислено посредством оптического анализа на земле и загружено в устройство перед получением этой сцены, из-за угла просмотра, из-за закона управления, влияние которого может быть вычислено посредством кинематического анализа и загружено в устройство перед получением этой сцены, из-за сопровождения закона управления через данные, которые могут поступать либо в реальном времени от системы управления угловой ориентацией и орбитой носителя или поступать из кинематического анализа и быть загруженными перед получением этой сцены, и из-за микровибраций, через данные, которые могут поступать из механического анализа и могут быть загружены перед получением этой сцены, или которые могут поступать в реальном времени от датчиков, присутствующих на борту спутника.
Значение SNR параметра, для детектора столбца i, зависит от значения параметров Kt(i) и N(i), от системных параметров, обозначенных посредством А(i), В(i) и С(i) и от значения сигнала S(i,j) изображения. S(i,j) получают посредством преобразования информации, характерной для части изображения, принятой от детектора столбца i и строки j. А(i) является коэффициентом, который представляет компонент шума перед компонентом шума, пропорциональным этому сигналу, В(i) представляет коэффициент перед компонентом шума, пропорциональным квадратному корню из этого сигнала, С(i) представляет коэффициент компонента, независящего от этого сигнала.
Устройство, реализующее способ данного изобретения, следовательно, располагает средством оценки сигнала S(i,j), полученного перед настройкой значения параметров Kt(i) и N(i). Это средство оценки обеспечивает измерение сигнала S(i,j), который может быть менее хорошо разрешенным или более шумным, чем измерение после суммирования. S(i,j) может, например, быть сигналом, полученным в N0 первом ряду или рядах (N0 известно и фиксировано посредством конструкции системы) оптического датчика и подвергаться суммированию с фиксированным числом строк, зависящих от параметра Kt0. Kt0 является параметром системы обнаружения и представляет время элементарной интеграции (соответствующее одной строке) по времени выборки для N0 первых строк.
S(i,j) может быть также сигналом, поданным посредством другого датчика, способного получать сигнал в другом частотном диапазоне, и получение которого выполняется перед получением посредством CMOS датчика. Например, в случае, в котором детекторы этого другого датчика помещены перед CMOS детекторами, посредством их положений в фокальной плоскости и из-за ориентации и скорости прокрутки этой сцены.
Следовательно, следующее получение некоторого элемента информации, характерного для части изображения, детектором (детектором, расположенным в столбце i, в строке j, эта информация преобразуется для получения сигнала S(i,j), и затем определяются значения параметров Kt(i) и N(i), которые оптимизируют функцию F(MTF, SNR).
MTF зависит от переменных fx и fy пространственной частоты, выраженных как пиксел-1, и от i, номера столбца, к которому принадлежит этот детектор. В общем, значение MTF вычисляется для пар (fx=0,5 пиксел-1, fy=0) и (fx=0, fy=0,5 пиксел-1), но могут быть выбраны и другие частотные значения для оптимизации качества изображения.
 ,
,
где MTFoptics(i,fx,fy) является MTF оптики, зависящей от телескопа, установленного на спутнике. Значения MTF этой оптики могут поступать из измерений, оптического анализа или датчиков, помещенных на борту спутника.
 .
.
Фиг.4 представляет начало столбца CMOS детектора, область в белом представляет фоточувствительную поверхность детектора, и параметры Pacq, Px и Pref представлены на этом чертеже.
MTFbroadcast(i,fx,fy) является MTF вещания. Значение MTF вещания известно посредством измерений, которые выполняются на спутнике перед тем, как он помещается на орбиту.
 .
.
Следовательно, Kt(i) задано как отношение между временем интеграции Tint некоторой строки и временем выборки Ts, которое соответствует Pref для детектора столбца i датчика.
Следовательно,  , где N(i) - число строк, используемых для суммы элементов информации, принятых от детекторов столбца i датчика.
, где N(i) - число строк, используемых для суммы элементов информации, принятых от детекторов столбца i датчика.
 .
.
MTFdesynchronization представляет MTF, обусловленную десинхронизацией скорости сцены относительно операции TDI.
Gx(I,N(i),fx) дано для оси х (перпендикулярной некоторому столбцу) фокальной плоскости, детектора i и числа пикселов N, подлежащих суммированию, для пространственной частоты fx (не забудьте, что значение MTF (модуляционной передаточной функции) дано для каждой пространственной частоты).
Gx(I,N(i),fx) является компонентом MTF десинхронизации согласно этой оси из-за того факта, что фактическая скорость прокрутки и ее ориентация на длительности интеграции и суммирования для N(i) пикселов в столбце сигнала сцены, которая прокручивается на матрице, отклоняется от этого значения и от теоретического направления, где эта скорость совершенно синхронизирована с прокруткой этой точки и направлением совершенно вдоль столбца матрицы.
Gy(I,N(i),fy): аналогично для оси y (вдоль некоторого столбца).
Другими словами, аппроксимация Gx и Gy дана ниже в случае, когда сигнал S(i,j) поступает от N0 первых строк, полученных с параметром Kt0.
 .
.
В этом уравнении, g(i) - общий угол сдвига. Этот угол представляет угол относительно столбца i матрицы, имеющей TDI функциональность скорости прокрутки сцены в фокальной плоскости этого инструмента. Этот угол является суммой влияния следующих элементарных членов:
- оптического искажения, загруженного перед получением сцены, на основе оптического анализа и на основе измерений, выполненных перед запуском,
- управления линией визирования, характеристики которой могут быть загружены перед получением сцены, на основе кинематического анализа,
- сопровождения команд управления линией визирования, характеристики которой могут быть загружены перед получением сцены, на основе кинематического анализа, или которые могут прийти из данных в реальном времени системы управления угловой ориентацией и орбитой, или AOCS, несущего транспортного средства. Система управления (пространственным) положением и параметрами орбиты является узлом оборудования на борту и программного обеспечения, которое обеспечивает функцию управления космическим аппаратом ввиду его установки с желаемым (пространственным) положением и настройки его орбиты на требования данной миссии,
- микровибраций, характеристики которых могут прийти от механического анализа, загруженного перед получением сцены или из данных реального времени от датчиков, установленных на борту несущего транспортного средства.
Другими словами, оптическое искажение телескопа, управление спутником и сопровождение команд являются характерными непосредственно в выражении MTF десинхронизации в членах Gx и Gy, так как они вмешиваются непосредственно в вычисление фактической скорости V(i) прокрутки и ее ориентации (угла сдвига g(i)).
Gy может быть аппроксимирован следующим образом:
 .
.
V(i) является скоростью прокрутки сцены на матрице, имеющей TDI функциональность, для детектора столбца i датчика, и это представлено на фиг.1 посредством элемента 103. Принимая во внимание оптическое искажение данного инструмента, эта скорость зависит от номера i столбца в матрице, имеющей TDI функциональность. Эта скорость выражается в пикселах, деленных на время. Эта скорость получается из скорости спутника на его орбите, из закона управления, из угловых скоростей углов Эйлера спутника, которые могут быть загружены перед получением сцены на основе анализа или получены в реальном времени посредством системы управления угловой ориентацией и орбитой на борту несущего транспортного средства, из характеристик микровибраций, загруженных перед получением сцены на основе механического анализа или полученных посредством датчиков на борту несущего транспортного средства в реальном времени и из характеристик оптики - фокальной характеристики и характеристики искажения - загруженных перед получением сцены на основе оптического анализа и на основе измерений, выполненных перед запуском.
Посредством рассмотрения того, что сигнал S(i,j) принят детектором, расположенным в столбце i и поступает от строки j, этой сцены, таким образом, моделируется SNR параметр. Этот сигнал получают с параметром Kt0, для N0 первых строк. Шум в этом сигнале зависит от следующей квадратичной суммы:
 .
.
Это выражение представляет считанный шум, который пропорционален значению этого сигнала, фотонному шуму и шуму, независящему от этого сигнала. Этот независимый шум включает в себя шум темнового тока и шум квантования. Следовательно, для N(i) строк, используемых для суммы, этот шум имеет следующее значение:
 .
.
Следовательно, значение отношения «сигнал-шум» выражается следующим образом:
 .
.
Если функция F(FTM, SNR), подлежащая оптимизации, является произведением FTM*SNR, то выражения MTFoptic(I,fx,fy) и MTFstatic(fx,fy) являются независящими от N(i) и Kt(i). Это может обеспечить упрощение выражения, подлежащего оптимизации, которое получается из произведения предыдущих функций.
Значения параметров Kt(i) и N(i) являются дискретными, и число этих значений является конечным. Следовательно, можно вычислить функцию F(FTM, SNR) для множества этих значений и затем найти пару (Kt(i), N(i)), которая максимизирует функцию F(FTM, SNR), причем эта пара зависит от S(i,j) и от i.
Поскольку эта оптимизация должна быть выполнена в реальном времени, также можно вычислить, для множества значений S(i,j) и i, оптимальное значение пары (Kt(i), N(i)), как описано выше. Эти элементы данных затем помещаются в таблицу и для ускорения считывания этих таблиц можно считать, что значения пары (Kt(i), N(i)) являются постоянными для некоторого диапазона подобных индексов i и для диапазона подобных значений сигнала S(i,j).
Также возможно то, что устройство, использующее этот способ, передает, в дополнение к информации, характерной для изображения, характеристики получения данных детектора (i,j). А именно, в частности, число строк N(i), использованное для этой суммы, или параметр Kt(i), использованный для выполнения этой суммы во время получения информации детектором (i,j). Передача этих данных является полезной для калибровки и радиометрической коррекции, которая корректирует радиометрические несоответствия между пикселами этого изображения.
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Распределенная архитектура для радионавигационного оборудования
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн

