Результат интеллектуальной деятельности: СПОСОБ ТРЕХУРОВНЕВОГО ПОДАВЛЕНИЯ ПУЛЬСАЦИЙ ВРАЩАЮЩЕГО МОМЕНТА ЧЕТЫРЕХФАЗНОГО ВЕНТИЛЬНОГО РЕАКТИВНОГО ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к способу трехуровневого подавления пульсаций вращающего момента вентильного реактивного электродвигателя и применимо к системе привода четырехфазного вентильного реактивного электродвигателя.
Уровень техники
Вентильный реактивный электродвигатель привлекает большое внимание благодаря своей простой и прочной конструкции, низкой стоимости изготовления и хорошими рабочими характеристиками регулирования скорости. Тем не менее, его особая конструкция с двумя типами выступающих полюсов и коммутационный тип возбуждающего режима приводят к тому, что в электромагнитном моменте на выходе присутствуют большие пульсации, которые существенно ухудшают использование вентильного реактивного электродвигателя в его областях применения. Поэтому исследователи предложили различные способы для того, чтобы устранить пульсации крутящего момента и при этом обеспечить минимальный расход меди. Эти способы достигают хорошего эффекта в определенном диапазоне скоростей. Тем не менее, когда скорость вращения высока, из-за ограниченного напряжения источника постоянного тока, способность системы контролировать и отслеживать желаемый ток, желаемое потокосцепление и желаемый крутящий момент ухудшаются и становится трудно эффективно устранить пульсации крутящего момента. Более того, из-за ограничения максимального тока обмотки и вольтамперной нагрузки полупроводниковых приборов система вентильного реактивного электродвигателя ограничена сверху по току, а ограничение по току приводит к тому, что плавный крутящий момент вентильного реактивного электродвигателя на выходе может быть обеспечен только в ограниченном диапазоне. Таким образом, все элементы управления плавными крутящими моментами на выходе имеют определенный рабочий диапазон.
Раскрытие сущности изобретения
Задачей настоящего изобретения является устранение проблемы, указанной в уровне техники, и получение способа трехуровневого подавления пульсаций вращающего момента четырехфазного вентильного реактивного электродвигателя.
Настоящее изобретение предоставляет способ трехуровневого подавления пульсаций вращающего момента четырехфазного вентильного реактивного электродвигателя, при этом способ включает в себя следующие этапы:
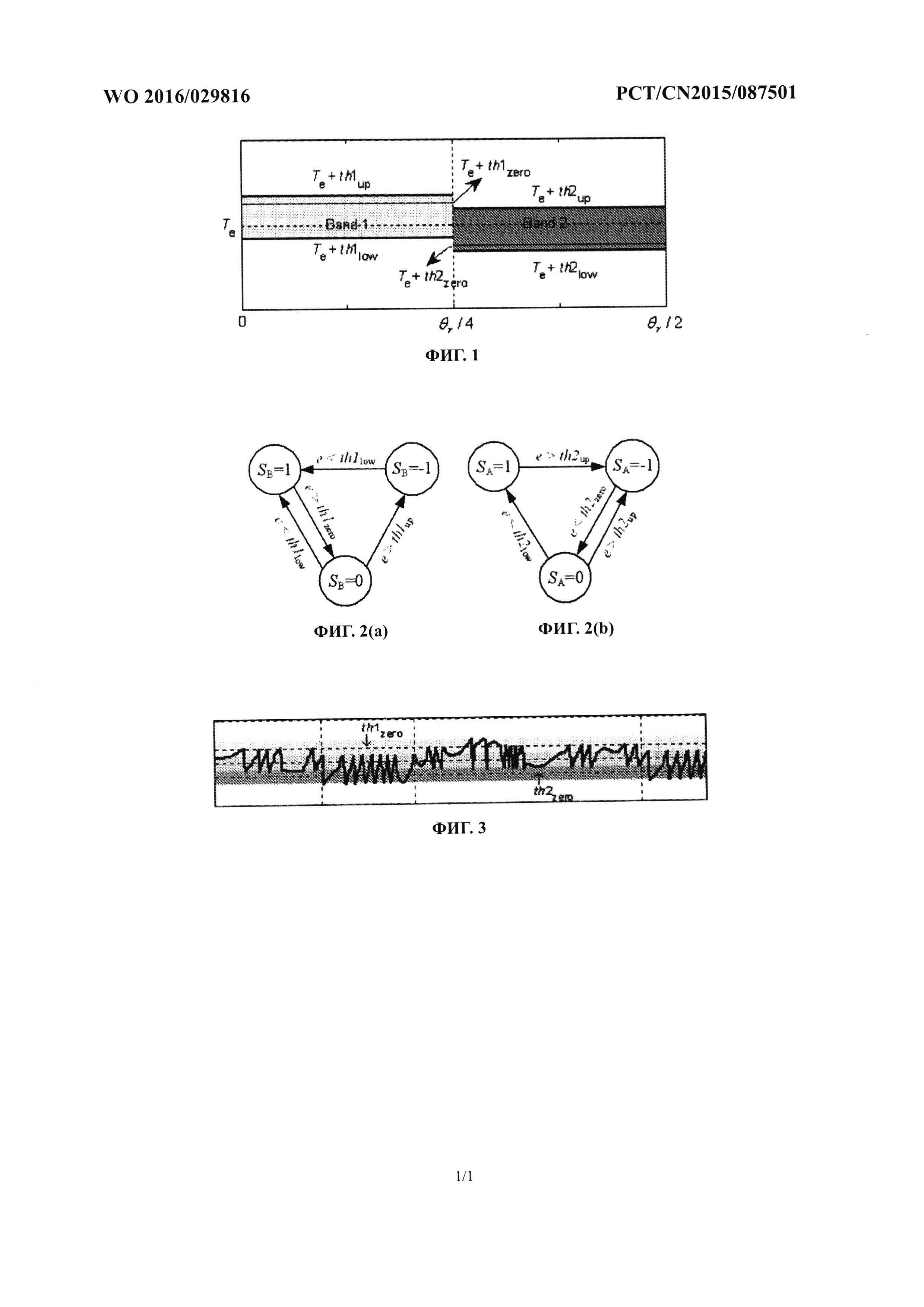
а. установку первой группы пороговых значений (th1low, th1zero, th1up) вращающего момента в интервале [0°, θr/4] положений ротора и второй группы пороговых значений (th2low, th2zero, th2up) вращающего момента в интервале [θr/4, θr/2] положений ротора, при этом указанные шесть пороговых значений вращающего момента удовлетворяют следующим условиям:




 , при этом
, при этом
положение 0° ротора является положением с минимальной фазовой индуктивностью,
положение θr ротора является угловым шагом, т.е. одним оборотом ротора, а
θr/2 является половиной оборота ротора;
b. установку возбужденного состояния SA в качестве питания возбужденного состояния фазы А, при этом
возбужденное состояние SA=1 обозначает, что возбуждающее напряжение фазы А положительное,
возбужденное состояние SA=0 обозначает, что напряжение фазы А нулевое, а
возбужденное состояние SA=-1 обозначает, что напряжение фазы А отрицательное;
установку возбужденного состояния SB в качестве питания возбужденного состояния фазы В, при этом
возбужденное состояние SB=1 обозначает, что возбуждающее напряжение фазы В положительное,
возбужденное состояние SB=0 обозначает, что напряжение фазы В нулевое, а
возбужденное состояние SB=-1 обозначает, что напряжение фазы В отрицательное; а
Те - желаемый плавный общий вращающий момент;
c. подачу питания на смежные фазу А и фазу В для возбуждений, при этом
сигнал питания, подаваемый для возбуждения на фазе А опережает сигнал питания, подаваемый для возбуждения на фазе В на θr/4 и в этот момент фазу А отключают, фазу В подключают и осуществляют трехуровневое подавление пульсации вращающего момента четырехфазного вентильного реактивного электродвигателя путем деления процесса коммутации из фазы А в фазу В на два интервала.
Разделение процесса коммутации из фазы А в фазу В на два интервала осуществляют следующим образом:
(1) В интервале [0°, θ1] положений ротора для фазы А используют вторую группу пороговых значений (th2low, th2zero, th2up) вращающего момента, для фазы В используют первую группу пороговых значений (th1low, th1zero, th1up) вращающего момента, критическое положение θ1 автоматически возникает в процессе коммутации, так что не требуется дополнительных вычислений;
(1.1) фазу В цикла проводимости начинают в положении ротора 0°,
устанавливают изначальное возбужденное состояние SB=1, а
ток и вращающий момент фазы В увеличиваются от 0;
возбужденное состояние SA оставляют в изначальном состоянии SA=1, а ток и вращающий момент фазы А увеличивают и увеличивают общий вращающий момент;
(1.2) когда общий вращающий момент увеличен до значения Te+th2up вращающего момента, возбужденное состояние SA переводят из значения 1 в значение -1 и уменьшают вращающий момент фазы А;
фазу В оставляют в исходном состоянии, а вращающий момент фазы В продолжают увеличивать; так как скорость изменения индуктивности в фазе В и фазовый ток малы в этот момент, то скорость увеличения вращающего момента фазы В меньше, чем скорость уменьшения вращающего момента фазы А, характер изменения общего вращающего момента определен фазой А и общий вращающий момент уменьшен;
(1.3) когда общий вращающий момент впервые уменьшен до значения Те+th1low вращающего момента, условия изменения состояния фазы А и фазы В не выполнены, возбужденные состояния SA и SB остаются в исходных состояниях и продолжают уменьшение общего вращающего момента;
(1.4) когда общий вращающий момент уменьшен до значения Te+th2zero вращающего момента, в фазе А запускают переход из возбужденного состояния SA=-1 в возбужденное состояние SA=0, и уменьшают вращающий момент фазы А, но скорость уменьшения меньше, чем та, что в возбужденном состоянии SA=-1;
фазу В оставляют в исходном возбужденном состоянии и продолжают увеличивать вращающий момент; в этот момент при условии, что возбужденное состояние SA=0 и возбужденное состояние SB=1, скорость уменьшения вращающего момента фазы А больше, чем скорость увеличения вращающего момента фазы В и общий вращающий момент уменьшен;
(1.5) когда общий вращающий момент уменьшен до значения Te+th2low вращающего момента, выполняются условия для изменения состояния фазы А, состояние фазы А переходит из возбужденного состояния SA=0 в возбужденное состояние SA=1 и вращающий момент фазы А увеличен;
фазу В оставляют в исходном состоянии и вращающий момент продолжают увеличивать; увеличивают общий вращающий момент;
(1.6) когда общий вращающий момент увеличен до значения Te+th2zero и затем до Te+th1low, условия изменения состояния фазы А и фазы В не выполняются в обоих случаях, общий вращающий момент продолжают увеличивать;
(1.7) когда общий вращающий момент увеличен до значения Te+th2up вращающего момента, этапы (1.2)~(1.6) повторяют, и состояние фазы В не переключают, не изменяют и оставляют возбужденным состоянием SB=1;
возбужденное состояние SA фазы А переключают между значениями 1, 0 и -1 и общим вращающим моментом управляют в диапазоне [Te+th2low, Te+th2up], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [0°, θ1] положений ротора;
(1.8) с увеличением положения ротора, скорость изменения индуктивности и ток фазы В увеличивают до определенного уровня;
после того как достигнуто определенное критическое положение, при возбужденном состоянии SA=0 и возбужденном состоянии SB=1, скорость уменьшения вращающего момента фазы А меньше, чем скорость увеличения вращающего момента фазы В и общий момент увеличен;
(2) в интервале [θ1, θr/4] положений ротора для фазы А продолжают использовать вторую группу пороговых значений (th2low, th2zero, th2up) вращающего момента, а для фазы В продолжают использовать первую группу пороговых значений (th1low, th1zero, th1up) вращающего момента;
(2.1) в положении θ1 ротора общий вращающий момент доводят до значения Te+th2up и состояние в фазе А переключают в возбужденное состояние SA=-1;
фазу В оставляют в возбужденном состоянии SB=1, и в этом положении скорость уменьшения вращающего момента фазы А при отрицательном сигнале питания больше, чем скорость увеличения вращающего момента фазы В при положительном сигнале питания, так что общий вращающий момент уменьшается;
однако эту ситуацию изменяют в дальнейшем; следуя за увеличением положения ротора, несмотря на то что возбужденные состояния фазы А и фазы В остаются неизменными, скорость уменьшения вращающего момента в фазе А в возбужденном состоянии SA=-1 меньше, чем скорость увеличения вращающего момента в фазе В в возбужденном состоянии SB=1, тем самым увеличивают общий вращающий момент;
(2.2) когда общий вращающий момент увеличен до значения Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускают и не изменяют и продолжают увеличивать общий вращающий момент;
(2.3) когда общий вращающий момент доводят до значения Te+th1zero, выполняются условия изменения состояния в фазе В и возбужденное состояние SB переводят в 0 и вращающий момент фазы В уменьшается; фазу А оставляют в исходном возбужденном состоянии SA=-1 и уменьшают общий вращающий момент;
(2.4) когда общий вращающий момент уменьшен до значения Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускаются и не изменяются и общий вращающий момент продолжает уменьшаться;
(2.5) когда общий вращающий момент уменьшен до значения Te+th1low, выполняются условия изменения состояния в фазе В и возбужденное состояние SB переводят в 1 и вращающий момент фазы В увеличивается;
фазу А оставляют в исходном возбужденном состоянии SA=-1 и увеличивают общий вращающий момент;
(2.6) повторяют этапы (2.2)-(2.5), возбужденное состояние SA оставляют равным -1 и вращающий момент и ток фазы А продолжают уменьшать;
возбужденное состояние SB переключают между 0 и 1 и общим вращающим моментом управляют в интервале [Te+th1low, Te+th1zero], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале положений ротора [θ1, θr/4];
(2.7) когда ротор находится в критическом положении и вращающий момент фазы В увеличен в возбужденном состоянии SB=0, скорость увеличения больше, чем скорость уменьшения вращающего момента фазы А в возбужденном состоянии SA=-1; в этот момент, общий вращающий момент увеличен;
(2.8) когда общий вращающий момент доведен до значения Te+th1up, производят запуск и изменение состояния фазы В, возбужденное состояние SB переводят из 0 в -1 и вращающий момент фазы В уменьшают;
вращающий момент фазы А продолжают уменьшать и уменьшают общий вращающий момент;
(2.9) когда общий вращающий момент уменьшен до значения Te+th1zero и затем до Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускают и не изменяют и общий вращающий момент продолжают уменьшать;
(2.10) когда общий вращающий момент уменьшен до значения Te+th1low, возбужденное состояние SB включают и изменяют на 1 и увеличивают вращающий момент фазы В;
фазу А оставляют в исходном состоянии, вращающий момент фазы А продолжают уменьшать и увеличивают общий вращающий момент;
(2.11) когда общий вращающий момент увеличен до значения Te+th1zero, возбужденное состояние SB запускают и переводят на 0, а возбужденное состояние SA оставляют равным -1; ситуация в этот момент такая же, как на этапе (2.7);
повторяют этапы (2.7)-(2.11), возбужденное состояние SA оставляют равным -1, возбужденное состояние SB переключают между значениями -1, 0 и 1 и общим вращающим моментом управляют в интервале [Te+th1low, Te+th1up], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [θ1, θr/4] положений ротора;
(2.12) когда ротор находится в критическом положении и вращающий момент фазы В больше не увеличивается, а наоборот, уменьшается при возбужденном состоянии SB=0 и возбужденном состоянии SA=-1,
этапы (2.2)-(2.5) повторяют с этого момента и вращающий момент управляется в интервале [Te+th1low, Te+th1zero], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [θ1, θr/4] положений ротора.
Положительный эффект:
Благодаря применению упомянутой выше технической схемы, путем установки двух групп пороговых значений вращающего момента и смежных возбужденных состояний фазы А и фазы В, настоящее изобретение обеспечивает переключение между тремя возбужденным состояниями в фазе А и фазе В, в которых возбуждающий сигнал питания положительный, нулевой и отрицательный соответственно, управляет общим вращающим моментом в интервале двух групп пороговых значений вращающего момента, подавляет пульсации четырехфазного вентильного реактивного электродвигателя и осуществляет плавное управление прямым и переходным вращающим моментом четырехфазного вентильного реактивного электродвигателя. Характеристики сигнала возбуждающего напряжения, подаваемого на обмотки электродвигателя, и сигнала желаемого напряжения совпадают. Действующее значение тока фазы идентично желаемому значению тока фазы, так что вентильный реактивный электродвигатель выдает пологий вращающий момент в максимальном диапазоне. Настоящее изобретение имеет высокую универсальность, желаемый практический эффект и широкие перспективы применения и применимо к различным типам систем привода четырехфазных вентильных реактивных электродвигателей различных конструкций.
Краткое описание чертежей
На ФИГ. 1 представлена принципиальная схема установки трехуровневых пороговых значений вращающего момента вентильного реактивного электродвигателя по настоящему изобретению;
На ФИГ. 2 (a) представлена принципиальная схема переключения сигнала питания возбужденного состояния фазы В вентильного реактивного электродвигателя по настоящему изобретению;
На ФИГ. 2 (б) представлена принципиальная схема переключения сигнала питания возбужденного состояния фазы А вентильного реактивного электродвигателя по настоящему изобретению;
На ФИГ. 3 представлен сигнал вращающего момента вентильного реактивного электродвигателя по настоящему изобретению.
Осуществление изобретения
Настоящее изобретение описано ниже посредством представленных вариантов реализации со ссылками на сопутствующие графические материалы:
Согласно ФИГ. 1 для одного четырехфазного вентильного реактивного электродвигателя приведены следующие определенные этапы:
а. Установка первой группы пороговых значений (th1low, th1zero, th1up) вращающего момента в интервале [θ°, θr/4] положений ротора и второй группы пороговых значений (th2low, th2zero, th2up) вращающего момента в интервале [θr/4, θr/2] положений ротора, при этом указанные шесть пороговых значений вращающего момента удовлетворяют следующим условиям:




 , при этом
, при этом
положение 0° ротора является положением с минимальной фазовой индуктивностью,
положение θr ротора является угловым шагом, т.е. одним оборотом ротора, а
θr/2 является половиной оборота ротора;
b. Согласно ФИГ. 2 установка возбужденного состояния SA в качестве питания возбужденного состояния фазы А, при этом
возбужденное состояние SA=1 обозначает, что возбуждающее напряжение фазы А положительное,
возбужденное состояние SA=0 обозначает, что напряжение фазы А нулевое, а
возбужденное состояние SA=-1 обозначает, что напряжение фазы А отрицательное;
установка возбужденного состояния SB в качестве питания возбужденного состояния фазы В, при этом
возбужденное состояние SB=1 обозначает, что возбуждающее напряжение фазы В положительное,
возбужденное состояние SB=0 обозначает, что напряжение фазы В нулевое, а
возбужденное состояние SB=-1 обозначает, что напряжение фазы В отрицательное; а Тe - желаемый плавный общий вращающий момент;
c. Подача питания на смежные фазу А и фазу В для возбуждений, при этом
сигнал питания, подаваемый для возбуждения на фазе А, опережает сигнал питания, подаваемый для возбуждения на фазе В на θr/4 и в этот момент фазу А отключают, фазу В подключают, и процесс коммутации между из фазы А в фазу В разделен на два интервала, как показано на ФИГ. 1:
(1) в интервале [0°, θ1] положений ротора для фазы А используют вторую группу пороговых значений (th2low, th2zero, th2up) вращающего момента, для фазы В используют первую группу пороговых значений (th1low, th1zero, th1up) вращающего момента, критическое положение θ1 автоматически возникает в процессе коммутации, так что не требуется дополнительных вычислений;
(1.1) фазу В интервала проводимости начинают в положении 0° ротора,
устанавливают изначальное возбужденное состояние SB=1, а
ток и вращающий момент В увеличивают от 0;
возбужденное состояние SA оставляют в изначальном состоянии SA=1, а ток и вращающий момент фазы А увеличивают и увеличивают общий вращающий момент;
(1.2) когда общий вращающий момент увеличен до значения Te+th2up, то возбужденное состояние SA переводят из значения 1 в значение -1 и уменьшают вращающий момент фазы А;
фазу В оставляют в исходном состоянии, а вращающий момент фазы В продолжают увеличивать; так как скорость изменения индуктивности в фазе В и фазовый ток малы в этот момент, то скорость увеличения вращающего момента фазы В меньше, чем скорость уменьшения вращающего момента фазы А, характер изменения общего вращающего момента определен фазой А, и общий вращающий момент уменьшен;
(1.3) когда общий вращающий момент впервые уменьшен до значения Te+th1low, условия изменения состояния фазы А и фазы В не выполнены, возбужденные состояния SA и SB остаются в исходных состояниях, и продолжают уменьшение общего вращающего момента;
(1.4) когда общий вращающий момент уменьшен до значения Te+th2zero, в фазе А запускают переход из возбужденного состояния SA=-1 в возбужденное состояние SA=0 и уменьшают вращающий момент фазы А, но скорость уменьшения меньше, чем та, что в возбужденном состоянии SA=-1;
фазу В оставляют в исходном возбужденном состоянии и вращающий момент продолжают увеличивать; в этот момент при условии, что возбужденное состояние SA=0 и возбужденное состояние SB=1, скорость уменьшения вращающего момента фазы А больше, чем скорость увеличения вращающего момента фазы В, и общий вращающий момент уменьшен;
(1.5) когда общий вращающий момент уменьшен до значения Te+th2low, выполнены условия для изменения состояния фазы А, состояние фазы А переходит из возбужденного состояния SA=0 в возбужденное состояние SA=1 и вращающий момент фазы А увеличивается;
фазу В оставляют в исходном состоянии и вращающий момент продолжают увеличивать; увеличивают общий вращающий момент;
(1.6) когда общий вращающий момент увеличен до значения Te+th2zero и затем до Te+th1low, но условия изменения состояния фазы А и фазы В не выполнены в обоих случаях, общий вращающий момент продолжают увеличивать;
(1.7) когда общий вращающий момент увеличен до значения Te+th2up, этапы (1.2)-(1.6) повторяют и состояние фазы В не запускают, не изменяют и оставляют возбужденным состоянием SB=1;
возбужденное состояние фазы А переключают между значениями 1, 0 и -1 и общим вращающим моментом управляют в диапазоне [Te+th2low, Te+th2up], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [0°, θ1] положений ротора;
(1.8) с увеличением положения ротора скорость изменения индуктивности и ток фазы В увеличивают до определенного уровня;
после того как достигнуто критическое положение, при возбужденном состоянии SA=0 и возбужденном состоянии SB=1, скорость уменьшения вращающего момента фазы А меньше, чем скорость увеличения вращающего момента фазы В и общий момент увеличен;
(2) в интервале [θ1, θr/4] положений ротора для фазы А продолжают использовать вторую группу пороговых значений (th2low, th2zero, th2up) вращающего момента, а для фазы В продолжают использовать первую группу пороговых значений (th1low, th1zero, th1up) вращающего момента;
(2.1) в положении θ1 ротора общий вращающий момент доводят до значения Te+th2up и состояние в фазе А переключают в возбужденное состояние SA=-1;
фазу В оставляют в возбужденном состоянии SB=1 и в этом положении скорость уменьшения вращающего момента в фазе А при отрицательном сигнале питания больше, чем скорость увеличения вращающего момента в фазе В при положительном сигнале питания, так что общий вращающий момент уменьшен;
однако эту ситуацию изменяют в дальнейшем; следуя за увеличением положения ротора, несмотря на то что возбужденные состояния фазы А и фазы В остаются неизменными, скорость уменьшения вращающего момента в фазе А в возбужденном состоянии SA=-1 меньше, чем скорость увеличения вращающего момента в фазе В в возбужденном состоянии SB=1, тем самым увеличивают общий вращающий момент;
(2.2) когда общий вращающий момент увеличен до значения Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускают и не изменяют и продолжают увеличивать общий вращающий момент;
(2.3) когда общий вращающий момент доведен до значения Te+th1zero, выполнены условия изменения состояния в фазе В и возбужденное состояние SB переводят в 0 и вращающий момент фазы В уменьшен;
фазу А оставляют в исходном возбужденном состоянии SA=-1 и уменьшают общий вращающий момент;
(2.4) когда общий вращающий момент уменьшен до значения Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускают и не изменяют и продолжают уменьшать общий вращающий момент;
(2.5) когда общий вращающий момент уменьшен до значения Te+th1low, выполнены условия изменения состояния в фазе В и возбужденное состояние SB переводят в 1 и вращающий момент фазы В увеличен;
фазу А оставляют в исходном возбужденном состоянии SA=-1 и увеличивают общий вращающий момент;
(2.6) повторяют этапы (2.2)-(2.5), возбужденное состояние SA оставляют равным -1 и вращающий момент и ток фазы А продолжают уменьшать;
возбужденное состояние SB переключают между 0 и 1 и общим вращающим моментом управляют в интервале [Te+th1low, Te+th1zero], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [θ1, θr/4] положений ротора;
(2.7) когда ротор находится в критическом положении и вращающий момент фазы В увеличен в возбужденном состоянии SB=0, скорость увеличения больше, чем скорость уменьшения вращающего момента фазы А в возбужденном состоянии SA=-1; в этот момент общий вращающий момент увеличен;
(2.8) когда общий вращающий момент доведен до значения Te+th1up, производят запуск и изменение состояния фазы В, возбужденное состояние SB переводят из 0 в -1 и вращающий момент фазы В уменьшают;
вращающий момент фазы А продолжают уменьшать и уменьшают общий вращающий момент;
(2.9) когда общий вращающий момент уменьшен до значения Te+th1zero и затем до Te+th2up, ни возбужденное состояние SA, ни возбужденное состояние SB не запускают и не изменяют и общий вращающий момент продолжают уменьшать;
(2.10) когда общий вращающий момент уменьшен до значения Te+th1low, возбужденное состояние SB включают и изменяют на 1 и увеличивают вращающий момент фазы В;
фазу А оставляют в исходном состоянии, вращающий момент фазы А продолжают уменьшать и увеличивают общий вращающий момент;
(2.11) когда общий вращающий момент увеличен до значения Te+th1zero, возбужденное состояние SB запускают и изменяют на 0, а возбужденное состояние SA оставляют равным -1; ситуация в этот момент такая же, как на этапе (2.7);
повторяют этапы (2.7)-(2.11), возбужденное состояние SA оставляют равным -1, возбужденное состояние SB переключают между значениями -1, 0 и 1 и общим вращающим моментом управляют в интервале [Te+th1low, Te+th1up], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [θ1, θr/4] положений ротора;
(2.12) когда ротор находится в критическом положении и вращающий момент фазы В в возбужденном состоянии SB=0, а возбужденное состояние SA=-1, общий вращающий момент более не увеличивают, а наоборот, уменьшают;
этапы (2.2)-(2.5) повторяют с этого момента и общим вращающим моментом управляют в интервале [Te+th1low, Te+th1zero], тем самым подавляя пульсации четырехфазного вентильного реактивного электродвигателя в интервале [θ1, θr/4] положений ротора.
Для смежных сигналов питания фазы В и фазы С, когда сигнал питания фазы В опережает на θr/4 сигнал питания фазы С, установка пороговых значений вращающего момента, процесс коммутации и способы переключения и перехода возбужденных состояний фазы В и фазы С аналогичны предыдущему случаю.
Для смежных сигналов питания фазы С и фазы D, когда сигнал питания фазы С опережает на θr/4 сигнал питания фазы D, установка пороговых значений вращающего момента, процесс коммутации и способы переключения и перехода возбужденных состояний фазы С и фазы D аналогичны предыдущему случаю.
Для смежных сигналов питания фазы D и фазы А, когда сигнал питания фазы D опережает на θr/4 сигнал питания фазы А, установка пороговых значений вращающего момента, процесс коммутации и способы переключения и перехода возбужденных состояний фазы D и фазы А аналогичны предыдущему случаю.
Экспериментально измеренный сигнал вращающего момента вентильного реактивного электродвигателя представлен на ФИГ. 3.





Многоцилиндровая синхронная энергоэффективная высокопроизводительная гидравлическая подъемная система и способ ее работы
Аппарат и метод для автоматического выравнивания корпуса конвейера на скреперном конвейере полностью механизированного угледобывающего забоя
Бурильная штанга с противодействием блокированию для анкерного крепления подошвы выработки угольной шахты
Устройство и способ сбора энергии для клети с направляющими тросами
Цельностальное, двухпластинчатое, самовозвратное, устойчивое к продольному изгибу распорное устройство и способ его изготовления
Устройство мониторинга и амортизации ударного воздействия падающего угля и способ для системы ленточного транспортера в угольной шахте
Система и способ обнаружения разрушения гантельного замка скребкового конвейера
Система и способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос
Индексы структурного различия верхних зон заполнения ордовикского известняка и способ их определения
Двунаправленный циркулирующий наклонный эскалатор
Способ получения тимосапонина вii
Устройство для периодического контроля жесткой направляющей для клети
Способы и системы для обработки изображений
Фенилатное производное, получение и фармацевтическая композиция и применение
Фенилатное производное, получение и фармацевтическая композиция и применение
Фенилатное производное, получение и фармацевтическая композиция и применение

