Результат интеллектуальной деятельности: АППАРАТ И МЕТОД ДЛЯ АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ КОРПУСА КОНВЕЙЕРА НА СКРЕПЕРНОМ КОНВЕЙЕРЕ ПОЛНОСТЬЮ МЕХАНИЗИРОВАННОГО УГЛЕДОБЫВАЮЩЕГО ЗАБОЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение связано с аппаратом и методом автоматического выравнивания корпуса конвейера на скреперном конвейере полностью механизированного угольного забоя.
Предшествующий уровень техники
Условия эксплуатации скреперного конвейера сложны и изменчивы. В процессе поступательного движения устройства полностью механизированного угледобывающего забоя прямолинейность корпуса конвейера скрепера не может соответствовать производственным требованиям из-за эффекта динамической нагрузки, а также таких факторов, как неправильная эксплуатация вручную на месте, таким образом, приводя к тяжелым последствиям, например истирание и порыв цепи скрепера и штыря в виде гантели, истирание средних лотков и деформация корпуса конвейера, что далее приводит к цепной реакции, приводя к тому, что вся установка или даже весь процесс добычи угля не может работать в обычном режиме или может произойти поломка, что приведет к серьезной угрозе нарушения безопасности. Скреперный конвейер служит одним из основных транспортирующих устройств для угледобывающего рабочего забоя, играет свою роль в транспортировке угля и является эксплуатационным путем очистного комбайна и центром приложения силы гидравлической опоры, таким образом, обеспечивая то, что прямолинейность корпуса конвейера скреперного конвейера может соответствовать производительности очистного комбайна и обеспечивать проведение совместной работы трех машин надлежащим образом.
В настоящее время ручной режим все еще используется в угольных забоях большинства шахт Китая. Управление устройством скреперного конвейера в пространстве выполняется при помощи скольжения вверх или вниз гидравлической опоры, управление толканием для сдвига зависит от датчика длины хода, завершение всего рабочего цикла от толкания до сдвига приводит к критическому накоплению ошибок, соответственно, также необходима будет ручная регулировка, а точность является низкой. Новый метод выпрямления, такой как технология беспроводной передачи, на практике слаба ввиду ограничений к гладкости угольной стены, хотя механические ошибки совместной работы между гидравлической опорой и скреперным конвейером в какой-то мере устраняются. Регулировка выпрямления при помощи оптоволоконного датчика достигает подходящей трансформации и низкозатратности, но на нее легко влияет рабочая обстановка в шахте и этот вариант не очень осуществим.
РЕЗЮМЕ
Настоящее изобретение призвано обеспечить аппарат и метод автоматического выравнивания корпуса конвейера на скреперном конвейере на основании относительного положения гидравлических опор рабочего угледобывающего забоя. Гибкий стержень между закрепленной гидравлической опорой и целевой гидравлической опорой служит в качестве линии привязки, таким образом, обеспечивая прямолинейность корпуса конвейера на скреперном конвейере, достигая позиционирования опоры и выпрямления скрепера и преодолевая дефекты существующей технологии выпрямления скреперного конвейера. Аппарат имеет высокую скорость реагирования, он прост и легок в эксплуатации, удобен и надежен.
До данного момента настоящее изобретение следует указанному техническому решению. Предоставляется аппарат для автоматического выравнивания корпуса конвейера на скреперном конвейере полностью механизированного угледобывающего забоя. Скреперный конвейер состоит из ряда средних лотков и ряда гидравлических опор, расположенных параллельно вдоль полностью механизированного угледобывающего забоя. Средние лотки соответствуют по количеству гидравлическим опорам, гидравлические опоры соединяются со средними лотками посредством вдвижных-выдвижных стержней, а штыри в виде гантелей используются на торцах средних лотков. Аппарат для автоматического выпрямления корпуса конвейера состоит из гибких стержней, аппарата измерения относительного положения, системы обработки сигналов, модуля передачи данных и системы электрогидравлического контроля, каждый гибкий стержень находится между двумя ближайшими гидравлическими опорами, датчики угла поворота установлены между гибкими стержнями и гидравлическими опорами, аппарат измерения относительного положения состоит из гибких соединителей, каждый из гибких соединителей установлен между двумя ближайшими средними лотками, гибкие соединители имеют датчики натяжения с функцией температурной компенсации, датчики угла поворота и датчики натяжения подключены к системе обработки сигналов через линии коммуникации, система обработки сигналов связана с системой электрогидравлического контроля через модуль передачи данных, а система электрогидравлического контроля подключена к гидравлическим опорам.
Также каждый гибкий стержень состоит из неподвижных оснований, убираемого выпрямляющего стержня и закрепленных болтов, два конца убираемого выпрямляющего стержня соединены с неподвижными основаниями, а неподвижные основания соединены с гидравлическими опорами посредством закрепленных болтов.
Также каждый гибкий соединитель состоит из соединительного стержня, гнезда установки датчика и регулировочных болтов, два конца соединительного стержня соединены со средними лотками посредством регулировочных болтов, гнездо установки датчика установлено на соединительный стержень, датчик натяжения установлен в гнездо установки датчика.
Также гибкие соединители находятся вблизи штырей в виде гантелей.
Методика автоматического выпрямления корпуса конвейера на скреперном конвейере полностью механизированного угледобывающего забоя, использующем аппарат автоматического выпрямления, состоит из следующих шагов:
a) одинаковое количество средних лотков и гидравлических опор, установленных параллельно полностью механизированного угледобывающего забоя, количество средних лотков соответствует количеству гидравлических опор;
b) выберите одну из гидравлических опор в качестве неподвижной гидравлической опоры, установите неподвижную гидравлическую опору вертикально по отношению к полностью механизированному угледобывающему забою и выберите гидравлическую опору вблизи неподвижной гидравлической опоры в качестве целевой гидравлической опоры;
c) наблюдайте относительные положения гидравлических опор: установите, относительно неподвижной гидравлической опоры, относительный угол а между гибким стержнем и целевой гидравлической опорой через датчик угла поворота;
d) проведите контроль позиционирования гидравлических опор: если α больше 90°, то датчик угла поворота генерирует сигнал положительного напряжения, а система электрогидравлического контроля регулирует целевую гидравлическую опору, которую будут тянуть для смещения; а если α меньше 90°, то датчик угла поворота генерирует сигнал отрицательного напряжения, а система электрогидравлического контроля регулирует целевую гидравлическую опору, пока α не дойдет до значения 90°; а датчик угла поворота генерирует сигнал нулевого напряжения, что устанавливает гибкий стержень параллельно полностью механизированному угольному забою, а действие по позиционированию на целевой гидравлической опоре завершено;
e) наблюдайте относительные положения средних лотков: выберите средний лоток, номер которого соответствует номеру неподвижной гидравлической опоры, в качестве неподвижного среднего лотка выберите средний лоток, номер которого совпадает с номером целевой гидравлической опоры, в качестве целевого среднего лотка и получите, взяв гибкий стержень в качестве линии привязки, сигнал напряжения, сгенерированный датчиком натяжения гибкого соединителя между неподвижным средним лотком и целевым средним лотком:
f) проведите регулировку выпрямления над средними лотками: если генерируемый датчиком натяжения сигнал напряжения положительный, система электрогидравлического контроля регулирует целевую гидравлическую опору, которую будет тянуть вдвижной-выдвижной стержень для протягивания через целевой средний лоток; а если генерируемый датчиком натяжения сигнал напряжения отрицательный, система электрогидравлического контроля регулирует целевую гидравлическую опору, которую будет тянуть вдвижной-выдвижной стержень для протягивания через целевой средний лоток пока сигнал напряжения, генерируемый датчиком натяжения не станет на нуль, так чтобы неподвижный средний лоток и целевой средний лоток располагались по прямой линии, а действие по выпрямлению целевом среднем лотке завершено;
g) возьмите целевую гидравлическую опору, на которой завершено действие позиционирования, в качестве неподвижной гидравлической опоры и выберите гидравлическую опору вблизи неподвижной гидравлической опоры в качестве целевой гидравлической опоры; и
h) повторите шаги от с) до g), пока все средние лотки не станут в прямую линию, так чтобы завершить автоматическое выпрямление корпуса конвейера на скреперном конвейере.
Положительные результаты заключаются в следующем. Настоящее изобретение берет гибкий стержень между неподвижной гидравлической опорой и целевой гидравлической опорой в качестве линии привязки, берет получаемый системой электрогидравлического контроля сигнал напряжения в качестве ориентира и выполняет соответствующие действия по гидравлическим опорам и скреперному конвейеру соответственно действующих условий работы пока сигналы напряжения, соответствующих датчиков угла поворота и всех датчиков натяжения не установлены на нуль, так что можно достичь позиционирования гидравлических опор и регулировки выпрямления над средними лотками скреперного конвейера, достигаются позиционирование опоры и выпрямление скрепера, время выпрямления значительно сокращается и улучшается эффективность производства.
КРАТКОЕ ОПИСАНИЕ ФИГУР
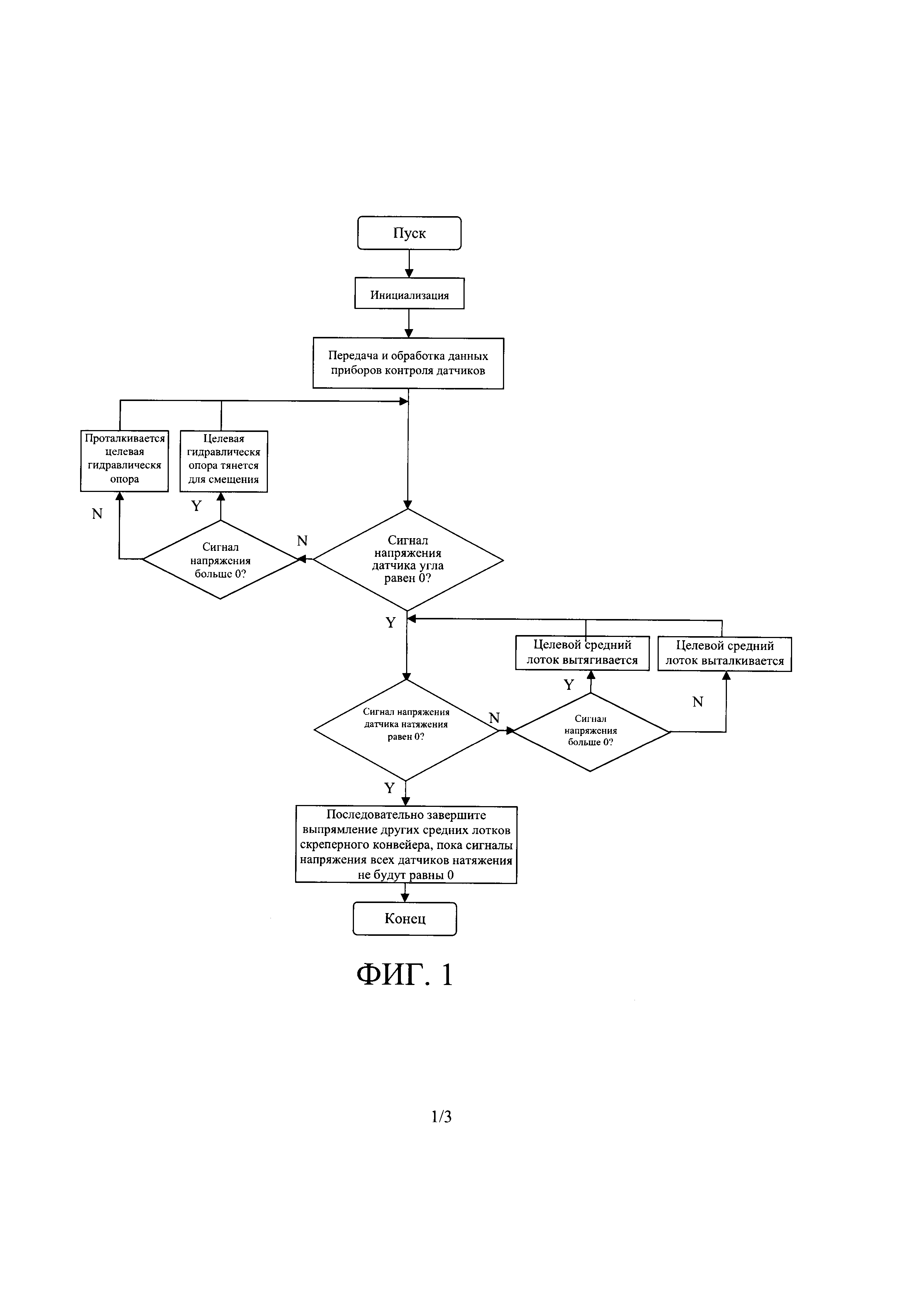
Фигура 1 является функциональной схемой метода автоматического выпрямления по настоящему изобретению;
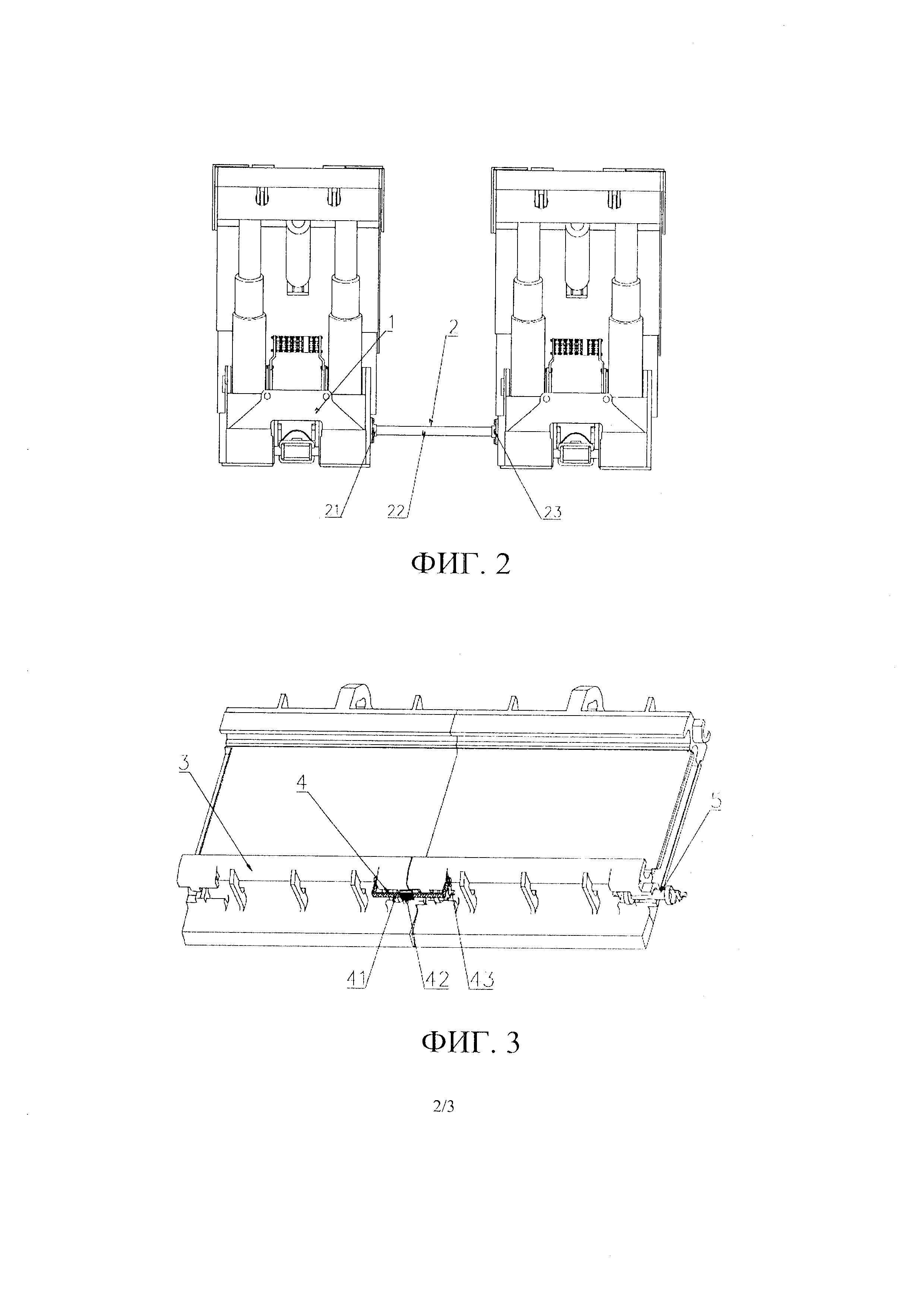
Фигура 2 - это схема установки гибкого стержня аппарата автоматического выпрямления по настоящему изобретению;
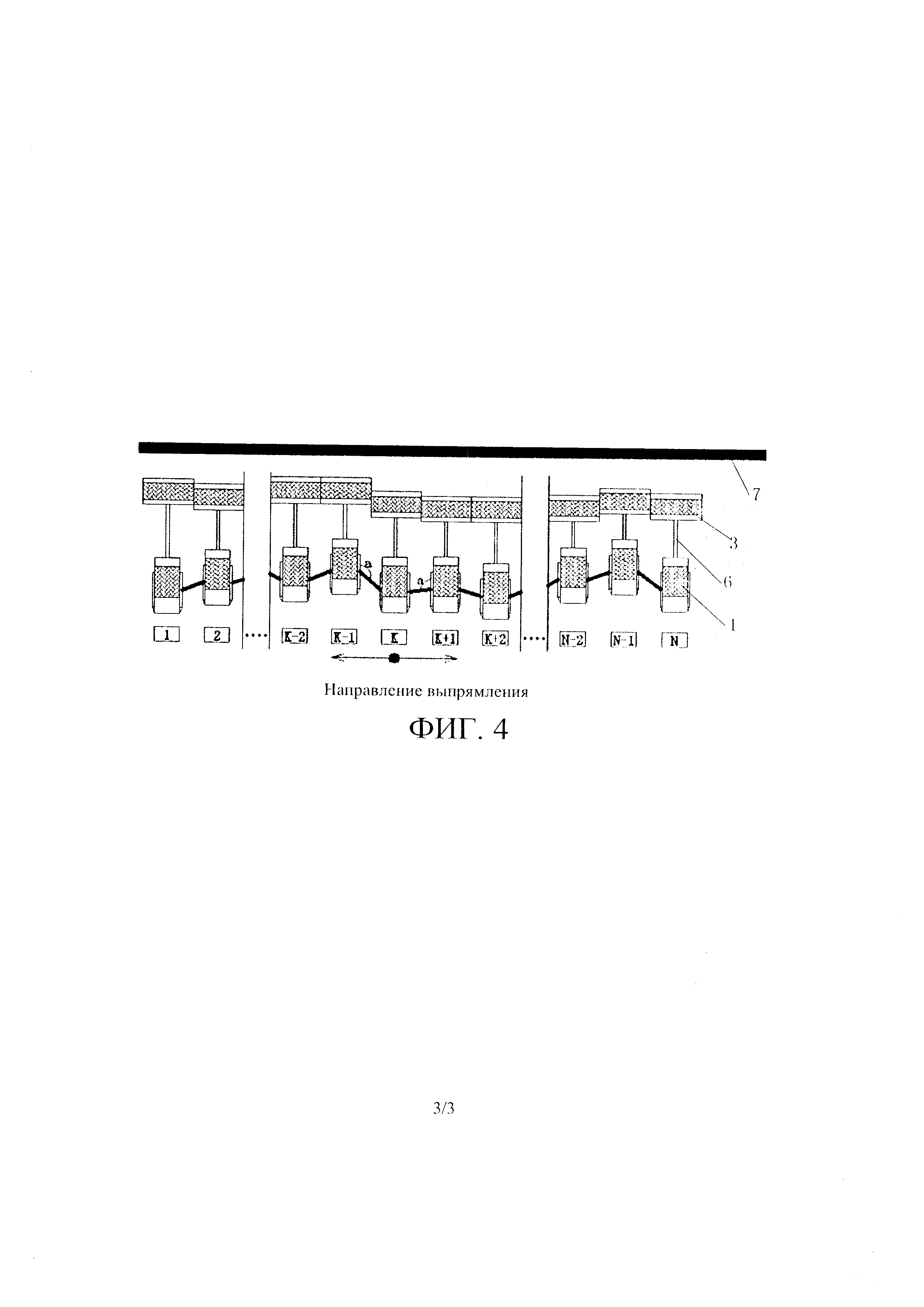
Фигура 3 - это схема установки аппарата измерения относительного положения, аппарата автоматического выпрямления по настоящему изобретению; и
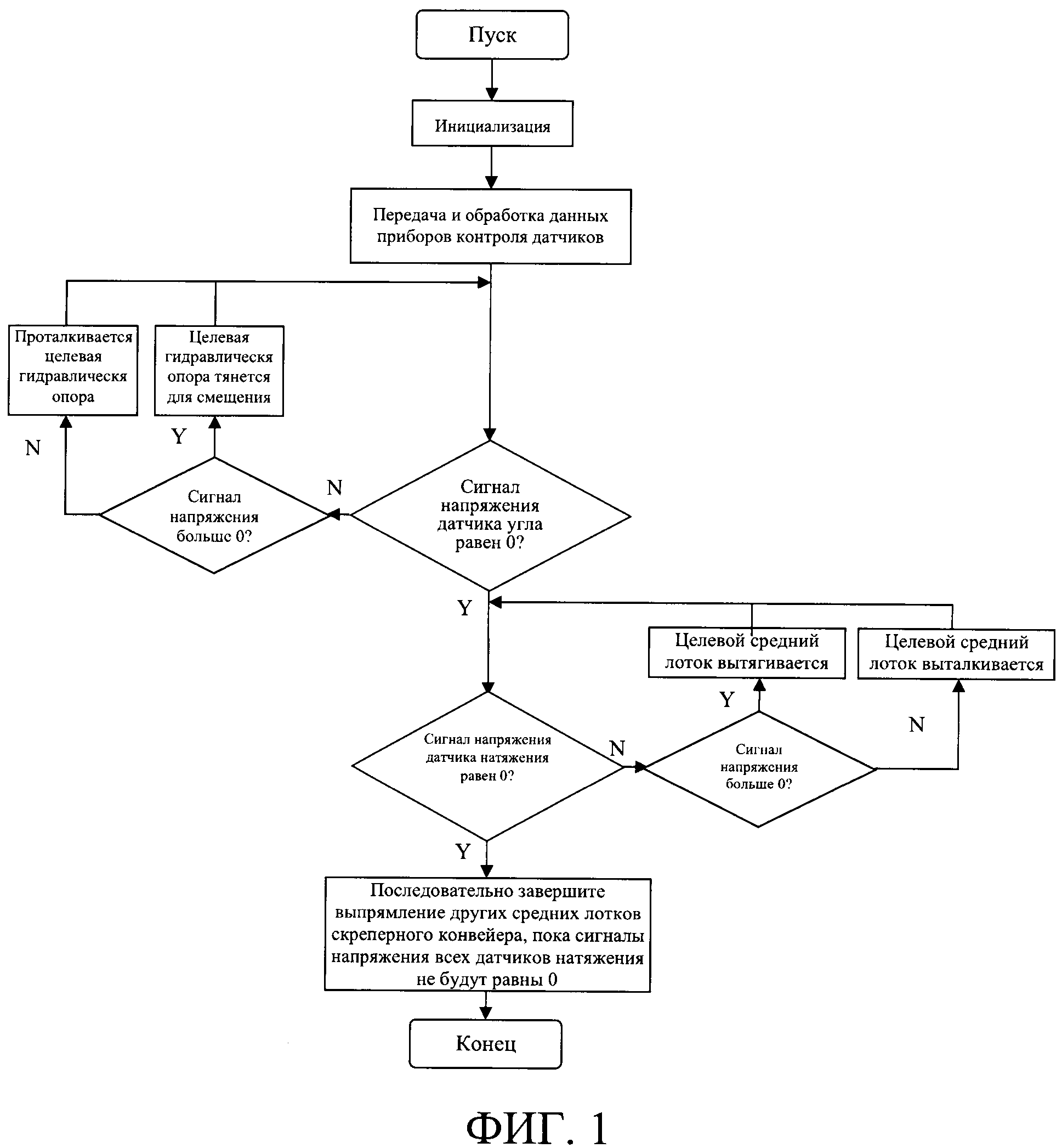
Фигура 4 - это диаграмма состояния гидравлической опоры и среднего лотка в процессе автоматического выпрямления в соответствии с осуществлением настоящего изобретения.
На чертежах: 1 - гидравлическая опора, 2 - гибкий стержень, 21 - неподвижное основание, 22 - выпрямляющий стержень, 23 - закрепленный болт, 3 - средний лоток, 4 - гибкий соединитель, 41 - соединительный стержень, 42 - гнездо установки датчика, 43 - регулировочный болт, 5 - штырь в виде гантели, 6 - вдвижной-выдвижной стержень и 7 - полностью механизированный угледобывающий забой.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение далее поясняется ниже в соответствии с чертежами.
Как показано на Фиг. 4, скреперный конвейер состоит из ряда средних лотков 3 и ряда гидравлических опор 1, расположенных параллельно вдоль полностью механизированного угольного забоя 7, средние лотки 3 соответствуют по количеству гидравлическим опорам 1 и имеют соответствующее соотношение с гидравлическими опорами 1, гидравлические опоры 1 соединяются со средними лотками 3 посредством вдвижных-выдвижных стержней 6, а штыри в виде гантелей 5 используются на торцах средних лотков 3.
Как показано на Фиг. 2 и Фиг. 3, аппарат для автоматического выпрямления корпуса конвейера скреперного конвейера полностью механизированного угледобывающего забоя по данному изобретению состоит из эластичных стержней 2, аппарата измерения относительного положения, системы обработки сигналов, модуля передачи данных и электродинамической системы контроля. Каждый гибкий стержень установлен между любыми двумя ближайшими гидравлическими опорами 1. Каждый гибкий стержень 2 состоит из неподвижных оснований 21, убираемого выпрямляющего стержня 22 и закрепленных болтов 23, два конца убираемого выпрямляющего стержня 22 соединены с неподвижными основаниями 21, а неподвижные основания 21 соединены с гидравлическими опорами 1 посредством закрепленных болтов 23. Датчики угла поворота установлены между эластичными стержнями 2 и гидравлическими опорами 1. Датчики угла поворота сконфигурированы так, чтобы выявлять углы сходимости между гибкими стержнями 2 и гидравлическими опорами 1 и генерировать соответствующие сигналы напряжения в соответствии с величинами выявленных углов сходимости. Аппарат измерения относительного положения состоит из гибких соединителей 4, каждый гибкий соединитель 4 установлен между двумя смежными средними лотками 3. Каждый гибкий соединитель 4 состоит из соединительного стержня 41, гнезда установки датчика 42 и регулировочных болтов 43, два конца соединительного стержня 41 соединены со средними лотками 3 посредством регулировочных болтов 43, гнездо установки датчика 42 установлено на соединительный стержень 41, датчик натяжения установлен в гнездо установки датчика 42. Когда два смежных средних лотка 3 не располагаются на одной прямой линии, соединительный стержень 41 будет сгибаться, а датчик натяжения будет генерировать соответствующий сигнал напряжения в соответствии с напряжением изгиба. Для того чтобы не вредить нормальной эксплуатации средних лотков 3, гибкие соединители 4 находятся вблизи штырей в виде гантелей. Датчики угла поворота и датчики натяжения подключены к системе обработки сигнала через линии коммуникации, система обработки сигналов связана с системой электрогидравлического контроля через модуль передачи данных, а система электрогидравлического контроля подключена к гидравлическим опорам, ЦПУ или ЦСП является сердцем системы обработки сигналов, сигналы данных датчиков угла поворота и датчиков натяжения можно собрать и обработать, сигналы данных конвертируются в сигналы напряжения через модуль преобразования данных, и сигналы напряжения передаются на систему электрогидравлического контроля через модуль передачи данных.
Как показано на Фиг. 1 и Фиг. 2, аппарат автоматического выпрямления принимается за метод автоматического выпрямления корпуса конвейера скреперного конвейера полностью механизированного угледобывающего забоя по данному изобретению. Метод автоматического выпрямления состоит из следующих шагов:
a) одинаковое количество средних лотков 3 и гидравлических опор 1, установленных параллельно полностью механизированного угледобывающего забоя 7, как 1, 2, …, N-1 и N, количество средних лотков 3 соответствует такому же количеству гидравлических опор 1;
b) выберите Kую гидравлическую опору 1 в качестве гидравлической опоры, установите неподвижную гидравлическую опору вертикально по отношению к полностью механизированному угледобывающему забою 7 и выберите К+1ую гидравлическую опору 1 вблизи неподвижной гидравлической опоры в качестве целевых гидравлических опор;
c) наблюдайте относительные положения гидравлических опор: установите, относительно неподвижной гидравлической опоры, относительный угол а между гибким стержнем 2 и целевыми гидравлическими опорами через датчики угла поворота;
d) проведите контроль позиционирования гидравлических опор: если а больше 90°, то датчики угла поворота генерируют сигналы положительного напряжения, а система электрогидравлического контроля регулирует целевые гидравлические опоры, которые будут тянуть для смещения; а если а меньше 90°, то датчики угла поворота генерируют сигналы отрицательного напряжения, а система электрогидравлического контроля регулирует целевые гидравлические опоры, в этом случае из-за того, что относительные углы а между K+1ой гидравлической опорой 1 и гибким стержнем 2 и между K-1ой гидравлической опорой 1 и гибким стержнем 2 больше 90°, датчики угла поворота генерируют сигналы положительного напряжения, электрогидравлическая система контроля регулирует K+1ую гидравлическую опору 1 и K-1ую гидравлическую опору 1, которая протягивается до сдвига пока а не дойдет до значения 90°; а датчики угла поворота генерируют сигналы нулевого напряжения, что устанавливает гибкий стержень 2 параллельно полностью механизированному угольному забою 7, а действие по позиционированию на целевые гидравлические опоры завершено; и в этом случае, K+1ая гидравлическая опора 1 и K-1ая гидравлическая опора 1 находятся вертикально к полностью механизированному угольному забою 7 отдельно;
e) наблюдайте относительные положения средних лотков: выберите Kый средний лоток 3, номер которого соответствует номеру неподвижной гидравлической опоры, в качестве неподвижного среднего лотка, выберите K+1ый средний лоток 3 и K-1ый средний лоток 3, номер которых совпадает с номерами целевых гидравлических опор, в качестве целевых средних лотков и получите, взяв гибкий стержень 2 в качестве линии привязки, сигналы напряжения, сгенерированные датчиками натяжения гибких соединителей 4 между неподвижным средним лотком и целевыми средними лотками;
f) проведите регулировку выпрямления над средними лотками: если генерируемый датчиком натяжения сигнал напряжения положительный, система электрогидравлического контроля регулирует целевые гидравлические опоры, которые будет тянуть вдвижной-выдвижной стержень 6 для протягивания через целевые средние лотки; а если генерируемые датчиками натяжения сигналы напряжения отрицательные, система электрогидравлического контроля регулирует целевые гидравлические опоры, которые будет тянуть вдвижной-выдвижной стержень 6 для протягивания через целевые средние лотки; в этом случае ввиду того, что сигнал напряжения, который генерируется датчиком натяжения между Kым средним лотком 3 и K+1ым средним лотком 3 является отрицательным, система электрогидравлического контроля регулирует K+1ый средний лоток 3 на выталкивание, а если сигнал напряжения, который генерируется датчиком натяжения между Kым средним лотком 3 и K-1ым средним лотком 3 является положительным, система электрогидравлического контроля регулирует K-1ый средний лоток на втягивание, пока сигналы напряжения, генерируемые датчиками натяжения, не станет на нуль, такой Kый средний лоток 3, K+1ый средний лоток 3 и K-1ый средний лоток 3 находятся на прямой линии, и действия по выпрямлению целевых средних лотков завершены;
g) выберите K+1ую гидравлическую опору 1 и K-1ую гидравлическую опору 1, на которых завершены действия позиционирования, в качестве неподвижных гидравлических опор и выберите K+2ую гидравлическую опору 1 и K-2ую гидравлическую опору 1 вблизи неподвижных гидравлических опор в качестве целевых гидравлических опор; и
h) повторите шаги от с) до g), установите K+2ую гидравлическую опору 1 и K-2ую гидравлическую опору 1 вертикально к полностью механизированному угледобывающему забою 7 отдельно, установите в прямую линию K+2ой средний лоток 3 и K-2ой средний лоток 3, K+1ый средний лоток 3 и K-1ый средний лоток 3 так, чтобы завершить автоматическое выпрямление корпуса конвейера на скреперном конвейере.
Указанное выше является только предпочтительными моментами осуществления настоящего изобретения. Необходимо заметить, что люди, которые сильны в искусстве, также могут сделать несколько улучшений и изменений, не отходя от принципа настоящего изобретения. Эти улучшения и изменения должны подпадать под защиту настоящего изобретения.
Соединительное устройство для подъемных канатов шахтного подъемника и способ измерения, осуществляемый посредством указанного устройства
Способ предотвращения и контроля внезапных зональных выбросов угля и газа
Просеивающее твердый материал устройство для подземной разработки с закладкой
Подъемная платформа шахтного подъемника и способ подъема
Способ заполнения шпура под анкер, пробуренного в кровле выработки, картриджами со смолой
Система транспортировки человека на дальнее расстояние по наклонной выработке
Способ получения подавляющей горение суспензии, содержащей измельчённую топливную золу, для локализации пожаров на угольных месторождениях
Система и способ автоматического регулирования натяжения направляющих канатов подвесной платформы с гибким кабелем
Аварийный буфер подъемника
Способ и механическое устройство предотвращения отклонения направляющего каната
Соединительное устройство для подъемных канатов шахтного подъемника и способ измерения, осуществляемый посредством указанного устройства
Устройство и способ автоматической регулировки натяжения гибкой направляющей шахтного подъемника
Подъемная платформа шахтного подъемника и способ подъема
Система транспортировки человека на дальнее расстояние по наклонной выработке
Закрепляющее устройство и устройство формирования изображения
Система и способ автоматического регулирования натяжения направляющих канатов подвесной платформы с гибким кабелем
Аварийный буфер подъемника
Способ и механическое устройство предотвращения отклонения направляющего каната
Стыковочная платформа шахтного подъемника, подходящая для гибкой направляющей, и способ стыкования для шахтного подъемника
Способ и устройство для исполнения команд действий пользователя

