Результат интеллектуальной деятельности: ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ
Вид РИД
Изобретение
Изобретение относится к гироскопической технике, а конкретно к двухосным гироскопическим стабилизаторам оптических элементов, работающим на подвижных объектах и предназначенным для стабилизации и управления оптическими элементами, и может найти применение в создании систем типа бинокль, перископ, лазерный дальномер.
Известно устройство стабилизации линии визирования (Пат. РФ №2260773, МПК7 G01C 21/18), содержащее рамку, зеркало, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, усилительно-корректирующие устройства каналов азимута и высоты, выход каждого из которых связан с входом исполнительного двигателя соответствующего канала, датчик угла, установленный на оси вращения зеркала, гироскопический датчик угловой скорости канала азимута и гироскопический датчик угловой скорости канала высоты.
Известно устройство стабилизации оптического изображения (Пат. РФ №2091843, МПК6 G02B 27/64), состоящее из двухзеркальной перископической системы, из которых первое зеркало неподвижно связано с корпусом прибора, а второе зеркало имеет возможность вращения вокруг оси, лежащей в плоскости зеркала и перпендикулярной оптической оси прибора и одновременно вокруг оси, лежащей в плоскости, перпендикулярной той же оптической оси, устройство включает в себя два двухстепенных гироскопа, один из которых измеряет угловую скорость поворота вокруг горизонтальной оси прибора, а второй - угловую скорость поворота вокруг оптической оси.
Недостатком данных устройств является наличие датчиков положения стабилизируемого зеркала, приводных двигателей, расположенных на вращающейся раме, что усложняет конструкцию устройства. В свою очередь, расположение датчиков на платформе со стабилизируемым зеркалом создает проблему вычисления положения центра масс и моментов инерции рамы.
Наиболее близким по технической сущности является устройство стабилизации оптического изображения киноаппарата (Авторское свидетельство СССР №1048318, G01C 19/00; G01C 21/18), содержащее оптический элемент, шарнирно связанный с внутренней рамкой трехстепенного гироскопа, двигатель и вращающийся фрикционный диск, контактирующий с подпруженным упором, двигатель связан с внутренней рамкой гироскопа посредством фрикционного диска, закрепленного на его валу, и подпруженного фрикционного упора, жестко соединенного с внутренней рамкой гироскопа, причем оптический элемент шарнирно связан с наружной рамкой гироскопа, при этом длины плеч шарниров находятся в соотношении 1:2.
Недостатком данного устройства являются большие габариты и масса, возникающие за счет наличия отдельного карданового подвеса, в котором установлен оптический элемент. Недостатком также является малые углы и угловые скорости обзора, вызванные ограниченными размерами фрикционного диска. Недостатком является невысокая точность управления оптическим элементом, вызванная наличием фрикционного диска и подпруженного упора, с помощью которых создаются управляющие воздействия.
Технический результат состоит в увеличении угла обзора и угловых скоростей слежения с увеличением точности управления оптическими элементами с уменьшением массы и габаритов.
В гиростабилизаторе оптических элементов, содержащем трехстепенной гироскоп, у которого во внешней рамке установлен гироузел, с которым кинематически шарнирно связан оптический элемент, и коррекционный мотор, новым является то, что оптический элемент представляет два зеркала, установленные во внешней рамке гироскопа симметрично относительно оси подвеса гироузла, а в кинематические шарнирные связи введены пружины, причем оси вращения зеркал параллельны оси подвеса гироузла, на котором с одной стороны в направлении оси ротора гиромотора установлена штанга с закрепленным на ее конце шарикоподшипнике, а на противоположном конце закреплена направляющая механического арретира, при этом шарикоподшипник штанги может перемещаться по направляющей бугеля, которая имеет П-образное сечение и средний радиус, равный длине штанги от центра подвеса гироузла до шарикоподшипника, причем ось вращения бугеля находится в корпусе прибора и перпендикулярна оси подвеса внешней рамки. В гиростабилизаторе оптических элементов новым является то, что коррекционный двигатель представляет два датчика, состоящие из статоров, выполненных в виде двух полукольцевых магнитов, рабочие зазоры которых взаимно перпендикулярны, а роторы выполнены в виде катушек, жестко закрепленных соответственно первая - на бугеле, а вторая - на кронштейне внешней рамки, причем плоскости катушек взаимно перпендикулярны, а активные части находятся в рабочих зазорах магнитов. В гиростабилизаторе оптических элементов, новым является то, что механический арретир содержит корпус, ловитель, упругое кольцо, возвратную пружину, размещенную между выступом в корпусе и ловителем, причем со стороны гироузла ловитель имеет коническую форму, переходящую в цилиндрическое отверстие, а на внешней цилиндрической поверхности имеется паз, в котором размещено упругое кольцо.
Сущность изобретения поясняется чертежами, приведенными на фиг. 1-7, где:
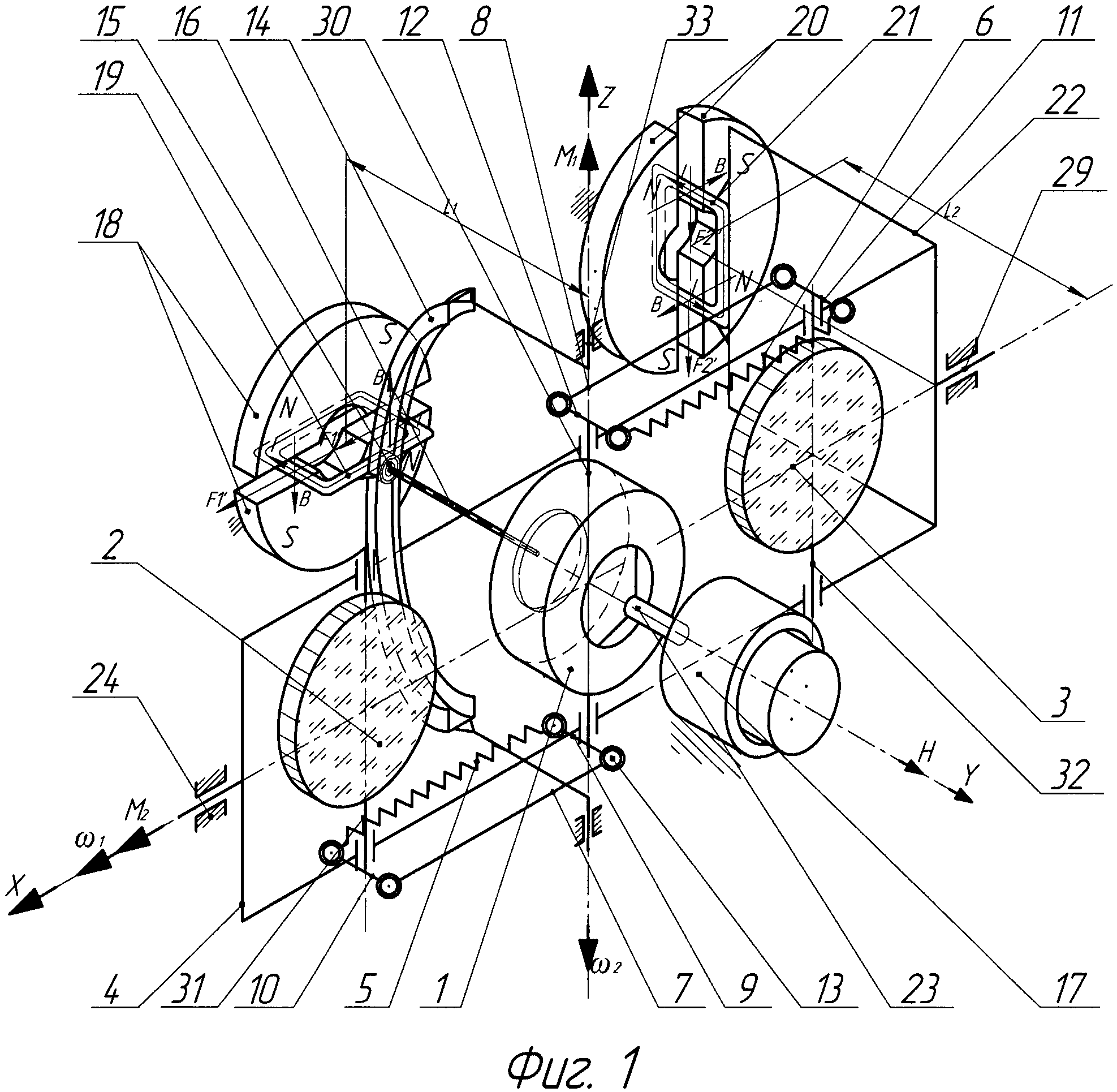
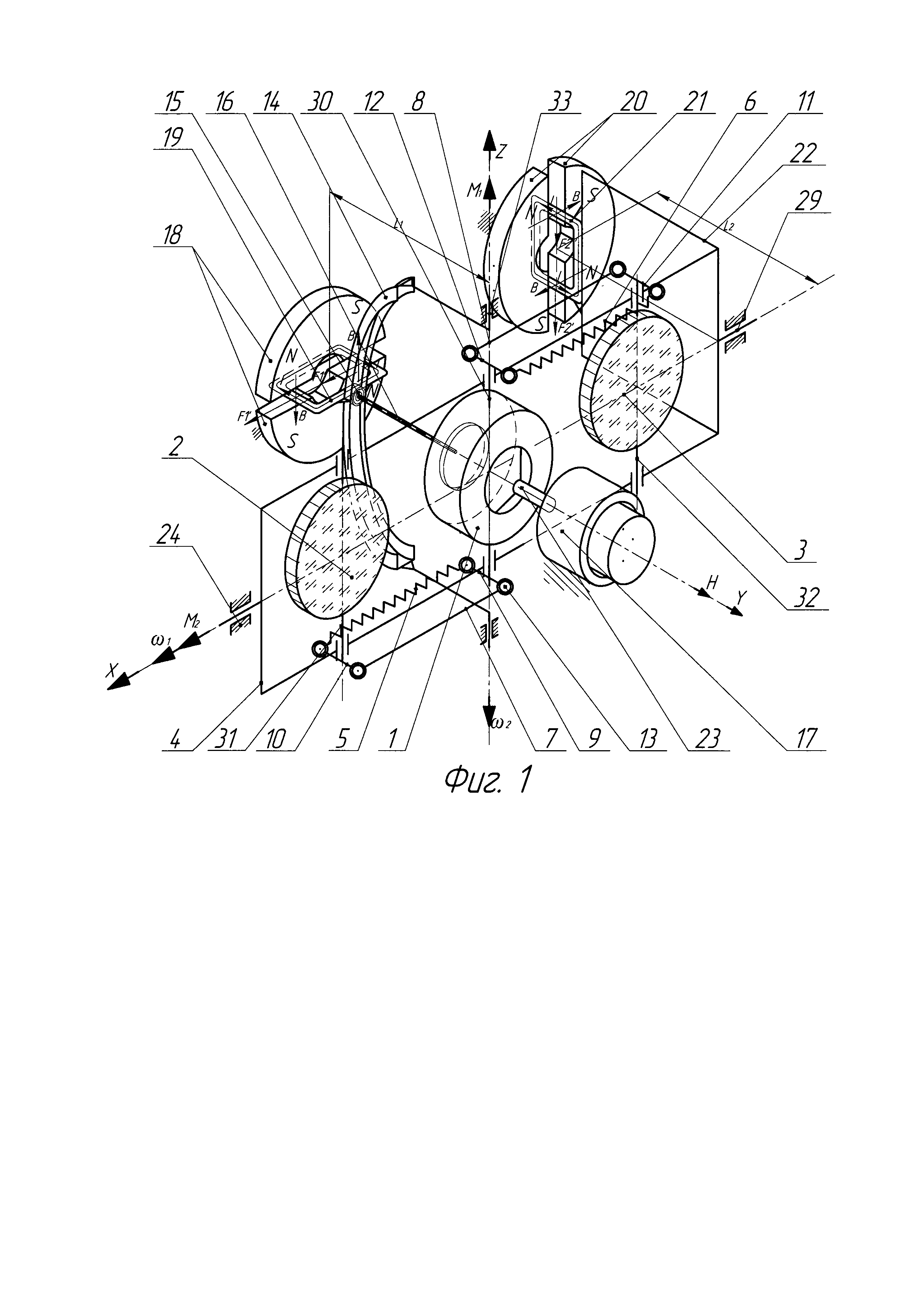
- фиг. 1 - кинематическая схема гиростабилизатора оптических элементов;
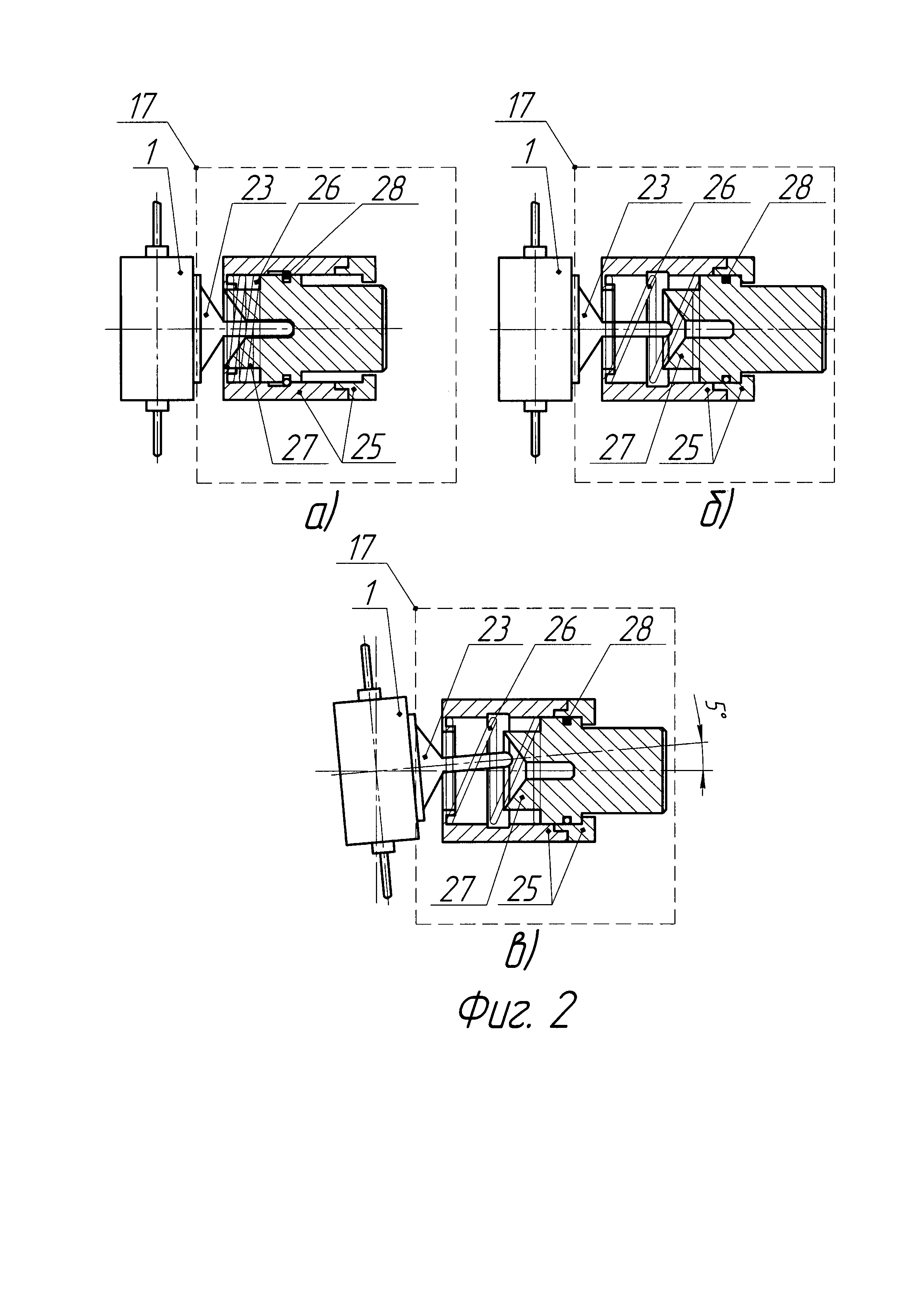
- фиг. 2 - схема механического арретира для:
а - арретированного положения гироузла;
б - разарретированного положения гироузла;
в - разарретированного и отклоненного положения гироузла.
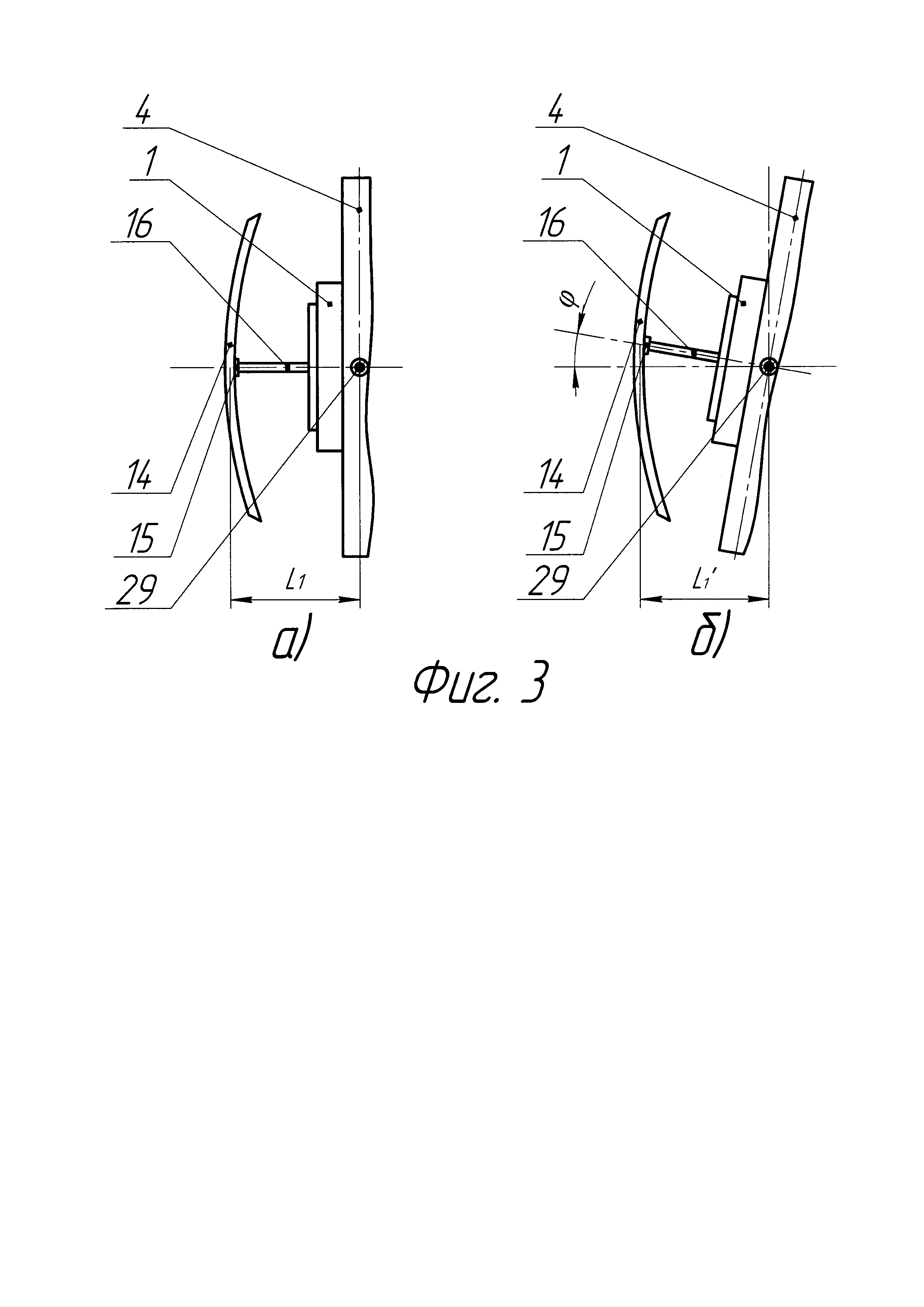
- фиг. 3 - зависимость плеча момента от положения гироузла для:
а - нейтрального положения гироузла;
б - отклоненного положения гироузла.
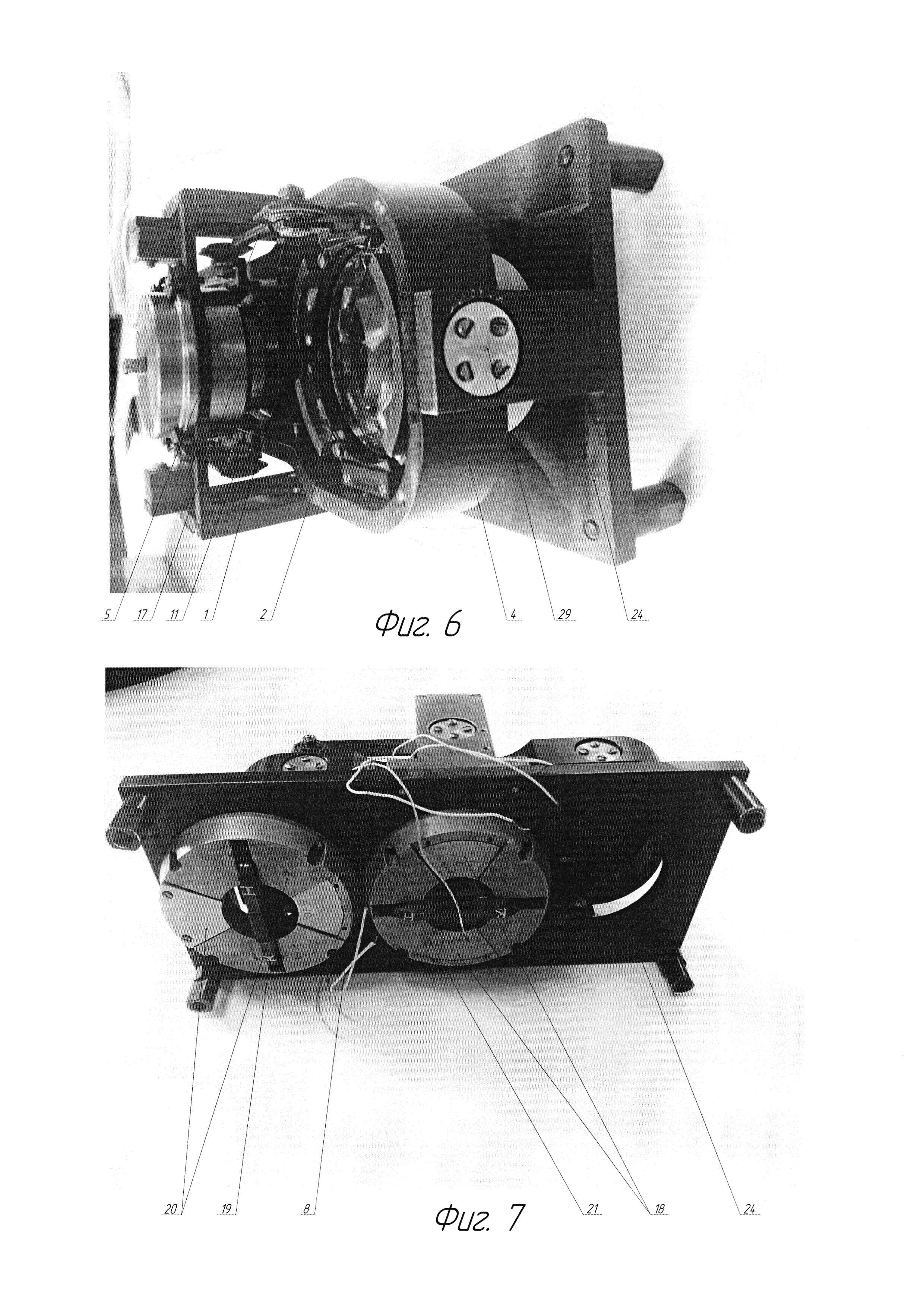
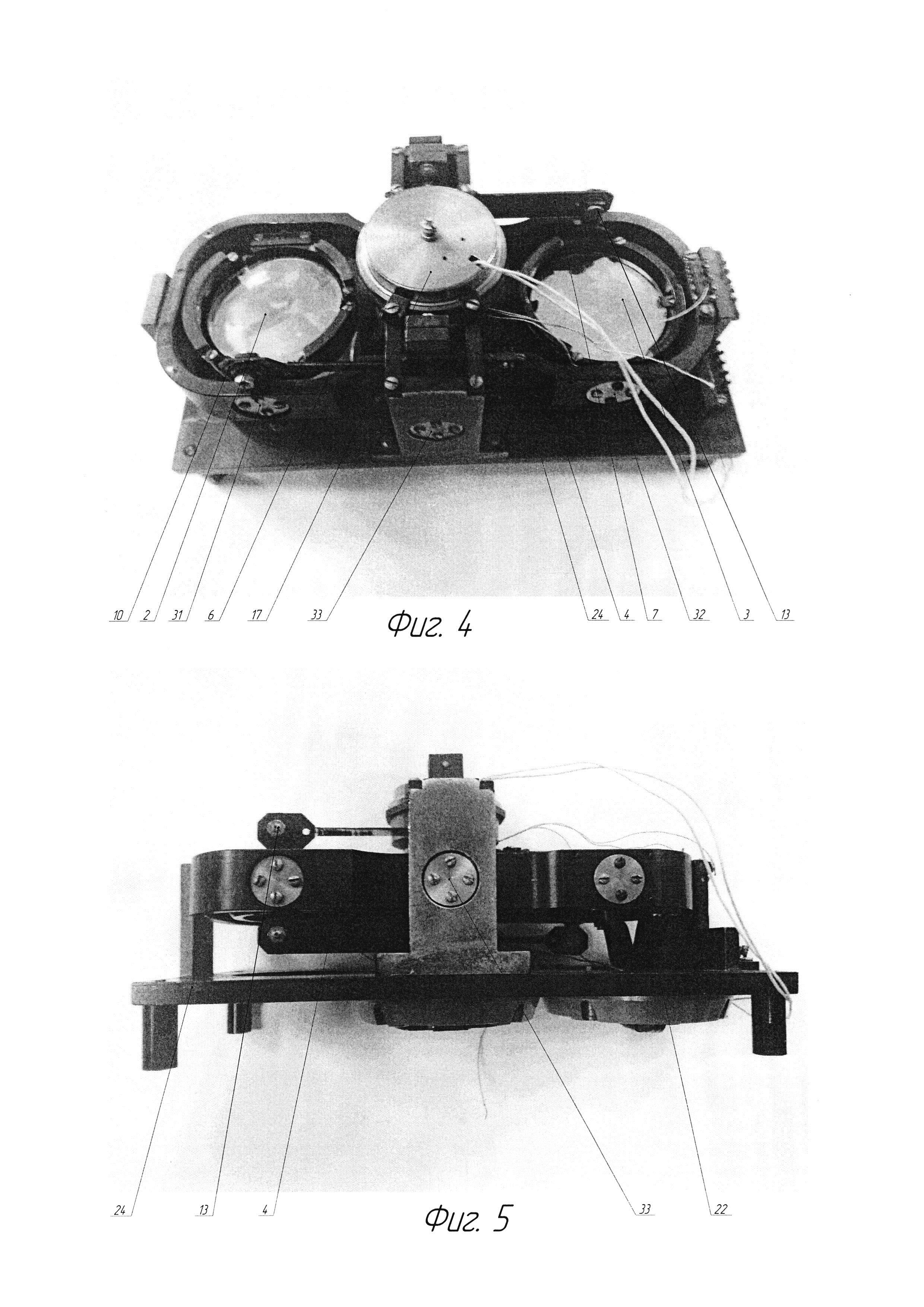
- фиг. 4-7 - фотографии лабораторного макета гиростабилизатора оптических элементов.
Здесь:
1 - гироузел (внутренняя рамка с гиромотором;
2, 3 - зеркала (оптические элементы);
4 - внешняя рамка;
5, 6 - пружины;
7-12 - рычаги;
13 - шарниры;
14 - бугель;
15 - шарикоподшипник;
16 - штанга;
17 - механический арретир;
18 - полукольцевые магниты первого датчика момента;
19 - катушка первого датчика момента;
20 - полукольцевые магниты второго датчика момента;
21 - катушка второго датчика момента;
22 - кронштейн;
23 - направляющая механического арретира;
24 - корпус гиростабилизатора;
25 - корпус механического арретира;
26 - возвратная пружина;
27 - ловитель;
28 - упругое кольцо;
29 - ось подвеса внешней рамки;
30 - ось подвеса гироузла;
31, 32 - оси подвеса зеркал;
33 - ось вращения бугеля.
Н - кинетический момент гироскопа;
I1, I2 - ток, протекающий по первой и второй катушке соответственно;
В - магнитная индукция в зазоре полукольцевых магнитов;
F1,  , F2,
, F2,  - силы, действующие на катушку первого и второго датчика момента соответственно;
- силы, действующие на катушку первого и второго датчика момента соответственно;
ω1 - угловая скорость прецессии внешней рамки;
ω2 - угловая скорость прецессии гироузла;
М1 - момент, созданный первый датчиком момента;
М2 - момент, созданный вторым датчиком момента;
L1,L2 - плечи действия сил.
Гиростабилизатор оптических элементов (Фиг. 1) состоит из трехстепенного гироскопа, гироузел 1 которого установлен во внешней рамке 4, в которой установлены зеркала 2, 3, оси вращения 31 и 32 которых находятся в одной плоскости с осью подвеса 30 гироузла 1 и ей параллельны и которые связаны с гироузлом 1 кинематической связью, состоящей из пружин 5, 6, рычагов 7-12 и шарниров 13, причем оси шарниров (цилиндрических) 13 параллельны оси подвеса 30 гироузла 1. Ось подвеса 29 внешней рамки 4 вращается в корпусе 24 гиростабилизатора. В корпусе гиростабилизатора закреплен бугель 14, ось вращения 33 которого перпендикулярна оси подвеса внешней рамки 4. На конце штанги 16 находится шарикоподшипник 15, который расположен в П-образной полости бугеля 14. На бугеле 14 закреплена катушка 19 первого датчика момента. Статор первого датчика момента состоит из двух полукольцевых магнитов 18, закрепленных на корпусе. Катушка 21 второго датчика момента закреплена на кронштейне 22, который жестко связан с внешней рамкой 4. Статор второго датчика момента, аналогично первому, состоит из двух полукольцевых магнитов 20 и установлен на корпусе. Рабочие зазоры, образованные полукольцевыми магнитами, взаимно перпендикулярны. При этом каждая пара полукольцевых магнитов имеет по два рабочих зазора, индукция В в которых противоположна по направлению и в которых располагаются рабочие части катушек.
Механический арретир 17 гиростабилизатора (Фиг. 2) содержит корпус 25, внутри которого расположена возвратная пружина 26, ловитель 27, пружина имеет упругое кольцо 28, расположенное в пазу на внешней цилиндрической поверхности. На гироузле 1 жестко закреплена цилиндрическая направляющая 23 арретира 23.
Наличие пружин 5 и 6 в кинематических связях гироузла 1 с зеркалами 2 и 3 позволяет компенсировать люфт в шарнирах 13, что является особенностью конструкции подвеса зеркал гиростабилизатора.
Не маловажной особенностью конструкции данного гиростабилизатора является то, что бугель 14, шарикоподшипник 15 и штанга 16 выполнены из немагнитного металла так как, если они будут выполнены из магнитного материала, то возникнут уводящие силы, создаваемые магнитами 18 первого датчика момента, которые могут привести к заклиниванию шарикоподшипника 15 в полости бугеля 14.
Гиростабилизатор оптических элементов имеет три режима работы: режим арретирования-разарретирования, режим наблюдения за неподвижным объектом и режим слежения за подвижным объектом.
Режим арретирования и разарретирования необходим для начальной выставки гироузла гиростабилизатора оптических элементов в начальное положение. Стоит отметить, что для удобства и безопасной транспортировки гиростабилизатора он должен находиться в арретированном состояния, так как в таком состоянии исключается движения подвижных частей конструкции.
Режим арретирования осуществляется следующим образом (Фиг. 2): нажатием на ловитель 27 он перемещается в сторону гироузла 1, в этот момент направляющая арретирования 23 попадает в полость ловителя 27, вследствие чего гироузел 1 занимает свое нейтральное положение. В момент нажатия на ловитель 27 и процесса арретирования упругое кольцо 28 попадает в паз в корпусе 25 арретира, таким образом, ловитель 27 фиксируется. Ловитель 27 со стороны гироузла 1 имеет форму конуса, который переходит цилиндрическое отверстие для фиксирования направляющей арретирования 23.
Для разарретирования гироузла 1 необходимо нажать на ловитель 27, тем самым сжав возвратную пружину 26, и отпустить ловитель 27, за счет силы сжатия возвратная пружина 26 вытолкнет ловитель 27 в крайнее положение, вследствие чего гироузел 1 будет разарретирован.
В режиме наблюдения за неподвижным объектом гиростабилизатор в заарретированном наводят на объект и нажимают на ловитель 27 (Фиг. 2).
В режиме наблюдения за неподвижным объектом (Фиг. 1) гиростабилизатор работает следующим образом (при этом на гиромотор подается питание и он набрал номинальные обороты). Угловые колебания корпуса устройства (вследствие тремора рук оператора, находящегося на неподвижном основании) создают периодические моменты, обусловленные моментами сил сухого трения в осях подвеса 29-32. Действие этих моментов осредняется в значительной степени наличием кинетического момента Н гиростабилизатора, и амплитуды колебаний гироузла 1 и связанных с ним кинематическими связями (рычагами 7-12 и пружинами 5, 6) зеркал 2, 3, могут быть ограничены соответствующими допусками за счет подбора параметров (кинетический момент, моменты инерции подвижных частей, моменты трения в опорах).
Однако за счет систематических составляющих моментов в осях подвеса и кинематических связях, а также остаточного небаланса изображение в поле зрения также начнет уходить. Для компенсации уходов необходимо в катушки 19 и 21 подать ток соответствующего направления и величины. Например, с помощью двух переключателей, которые подключают к катушкам задатчики токов (они на схеме не показаны). Работает коррекция по следующему правилу: переключатель азимута в «влево» - изображение перемещается влево; переключатель азимута в «вправо» - изображение перемещается вправо; переключатель по высоте в «вверх» - изображение перемещается вверх; переключатель по высоте в «вниз» - изображение перемещается вниз. Таким образом, изображение будет удерживаться в центре поля зрения с допустимыми амплитудами.
В режиме наблюдения за подвижным объектом гиростабилизатор в заарретированном наводят на объект и нажимают на ловитель 27.
В режиме слежения за подвижным объектом оператор, использующий гиростабилизатор, подает управляющий сигнал на необходимый ему датчик момента для поворота оптических элементов вокруг соответствующей оси.
В режиме слежения за подвижным объектом (Фиг. 1) гиростабилизатор работает следующим образом, при подаче управляющего сигнала (тока) I1 на катушку 19 первого датчика момента, ток I1 взаимодействует с магнитной индукцией В, создаваемой двумя полукольцевыми магнитами 18, в результате чего возникает сила  в левой части катушки и сила
в левой части катушки и сила  правой части катушки:
правой части катушки:
 ,
,
где W - количество витков катушки, - активная длина проводника, В - магнитная индукция, I1 - управляющий первого датчика момента.
- активная длина проводника, В - магнитная индукция, I1 - управляющий первого датчика момента.
Результирующая сила, созданная первым датчиком момента, будет равна:
Момент, действующий на гироузел, вычисляется следующим образом:
 .
.
Угловая скорость прецессии гироузла:
 .
.
Аналогично первому датчику момента, момент создается на втором датчике момента, при подаче управляющего тока I2 на катушку 21 второго датчика момента, ток I2 взаимодействует с магнитной индукцией В, создаваемой двумя полукольцевыми магнитами 20, в результате чего возникает сила  в верхней части катушки и сила
в верхней части катушки и сила  в нижней части катушки:
в нижней части катушки:
 ,
,
где W - количество витков катушки;  - активная длина проводника; B - магнитная индукция; I2 - управляющий ток второго датчика момента.
- активная длина проводника; B - магнитная индукция; I2 - управляющий ток второго датчика момента.
Результирующая сила, созданная вторым датчиком момента, будет равна:
Момент, действующий на гироузел, вычисляется следующим образом:
 .
.
Угловая скорость прецессии гироузла:
 .
.
При этом следует отметить, что переключателями, которые управляют токами в датчиках моментов, не только изменяется направление токов I1, I2, но их величина, что определяется угловой скоростью линии визирования.
Особенностью работы данного гиростабилизатора является, то, что при отклоненном положении внешней рамки 4, как показано на фиг. 3, плечо L1 силы F1 будет изменяться и примет значение  , так как бугель 14 имеет форму дуги определенного радиуса. Плечо силы F1 равно радиусу дуги бугеля 14 в том случае, когда внешняя рамка 4 имеет нейтральное положение.
, так как бугель 14 имеет форму дуги определенного радиуса. Плечо силы F1 равно радиусу дуги бугеля 14 в том случае, когда внешняя рамка 4 имеет нейтральное положение.
Наличие оптических элементов (зеркал) во внешней рамке гироскопа выгодно отличает его от прототипа, так как существенно уменьшаются габариты и масса устройства, существенно упрощается конструкция, вследствие отсутствия второго карданового подвеса для оптического элемента, увеличивается точность стабилизации, так как отсутствуют дополнительные кинематические связи.
Введение в конструкцию двух датчиков момента, которые образуют коррекционный двигатель, увеличивает точность управления оптическим элементом.
Наличие механического арретира позволяет выполнить выставку гироузла в начальное положение, чего нет у прототипа. Особенностью данного арретира является удобство его использования, так как процесс арретирования и разарретирования осуществляется одним нажатием на ловитель без использования электрических сигналов, что приводило бы к дополнительным уводящим моментам.
Для проверки работоспособности гиростабилизатора был изготовлен лабораторный макет, который приведен на фотографиях (Фиг. 4-7), на которых показаны основные узлы теми же позициями, что и на фиг. 1.
В качестве гиромотора гироузла был применен малогабаритный синхронный гиромотор ГМС-1 с кинетическим моментом Н=0,1 Нмс, питаемый от статического трехфазного вторичного источника напряжением U=36 B, частотой f=1000 Гц. Полукольцевые постоянные магниты изготовлены из сплава ЮНДК и в комплекте с катушками позволяли создать максимальную скорость прецессии 10°/с при токе 50 mA. В принципе для наблюдения за неподвижным объектом (при компенсации дрейфа гиростабилизатора по азимуту и углу места) можно ввести переключатель диапазонов управления и сделать в этом случае скорости управления, превышающие угловую скорость дрейфа в 2-3 раза. В этом режиме максимальная скорость прецессии составит величину порядка 2-4°/мин.
Для оценки точности стабилизации применялся автоколлиматор АК-1 с ценой деления 10 угловых секунд.
При наблюдении за неподвижным объектом точность стабилизации при компенсации дрейфа составила 20-30 угловых секунд.
Способ изготовления составной модели для литья
Способ обработки внутренней и внешней поверхности изделий, изготовленных аддитивным методом, и устройство, его реализующее
Установка для снятия механических характеристик гиромотора
Способ обработки листа из титанового сплава
Способ оценки двигательных действий спортсмена в бадминтоне
Мотор-колесо для самолета
Синхронный электродвигатель с магнитной редукцией
Устройство для увлажнения воздуха
Поворотный электромагнит
Магнитный редуктор
Тренажер для изучения гирополукомпаса
Устройство управления креновой рамой курсовертикали
Устройство создания нагрузочного момента двигателя постоянного тока
Способ определения параметров моментного двигателя постоянного тока

