Результат интеллектуальной деятельности: СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом, а также в атмосферной акустике и пассивной радиолокации.
Известен способ определения угла прихода плоской волны движущегося источника двухканальной приемной системой [1, с. 139]. Этот способ имеет целью устранение известного недостатка статического накопления за заданное время Тн в схеме измерения направления на движущийся источник и/или с подвижном носителя приемной системы, который приводит к ошибкам определения координат, зависящим от скорости относительного перемещения источника и приемников. Для этого используются измерительные устройства, содержащие дискриминаторы измеряемого параметра и динамические сглаживающие устройства. В данном способе используют приемную систему из двух антенн или антенну со сформированными на ней двумя каналами с фазовыми центрами, разнесенными на расстояние dф (например, две половины антенны). Оба канала компенсируют (фазируют) независимо, но в одном назначенном опорном направлении αоп.
Для определения искомого неизвестного направления αs по сигналам обоих каналов измеряют величину отклонения опорного направления αоп от искомого неизвестного αs, а потом корректируют опорное направление на величину измеренного отклонения. Для этого используют взаимный спектр плотности мощности (ВСПМ) сигналов, принятых антеннами, и определяют выходную величину «канала измерения» с1 пропорциональную угловому отклонению δα=αs-αоп, и выходную величину «канала нормирования» с2. Далее определяют «малоосредненную» оценку δα угла отклонения δα=αs-αоп в соответствии с выражением:  , где
, где  - масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами антенн или полуантенн. Измеренную таким образом оценку угла рассогласования используют для корректировки опорного направления, получая «малоосредненную» оценку αм, которую подвергают накоплению до требуемого времени осреднения Тн либо прямым, статическим способом, при малой скорости перемещения объекта, либо известными методами динамического сглаживания последовательности измерений, используя, например, метод наименьших квадратов или фильтр Калмана [2].
- масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами антенн или полуантенн. Измеренную таким образом оценку угла рассогласования используют для корректировки опорного направления, получая «малоосредненную» оценку αм, которую подвергают накоплению до требуемого времени осреднения Тн либо прямым, статическим способом, при малой скорости перемещения объекта, либо известными методами динамического сглаживания последовательности измерений, используя, например, метод наименьших квадратов или фильтр Калмана [2].
Недостатком данного способа является то, что, во-первых, в нем используют информацию только двух приемных каналов, в то время как пассивное определение координат по кривизне волнового фронта в круговом поле возможно лишь при М≥3, во-вторых, он может быть использован только для определения одной координаты: угла прихода сигнала с плоским волновым фронтом, в то время как пассивная локация в принципе работает в зоне со сферическим или цилиндрическим фронтом и ее целью является определение и направления, и дальности, в общем случае также и угла места.
Для определения координат источника излучения, в том числе дальности, при приеме сигнала с круговым (сферическим, цилиндрическим) волновым фронтом этот метод не может быть использован.
Наиболее близким по совокупности общих признаков к предлагаемому способу является «Способ пассивного определения координат источников излучения» [3], содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование Фурье (ДПФ) выборок сигналов антенн объемом NПФ в массивы спектральных частотных отсчетов Xm(ƒk) в полосе приема ƒн≤ƒk≤ƒв, индикатор с координатной сеткой размером P×Q, с интервалом между ее узлами δα и δD соответственно. В каждом pq-м узле координатной сетки определяют разности времен прихода сигнала τmn(αp,Dq) от точки в пространстве с координатами этого узла αр, Dq к центрам каждой mn-й пары антенн и весовые коэффициенты wαmn(αp,Dq) и wDmn(αp,Dq), равные производным ∂τmn(αp,Dq)/∂α и ∂τmn(αp,Dq)/∂D соответственно. По сигналам с выходов всех mn-х пар антенн определяют взаимно корреляционные функции Сmn(τ), используя сначала определение взаимных спектров плотности мощности (ВСПМ) и обратное преобразование Фурье, и в координатной сетке индикатора в каждом pq-м узле выводят суммарные по индексу mn значения попарных взаимно корреляционных функций Сmn(τmn(αр, Dq)) всех mn-х пар антенн с весовыми коэффициентами wαmn(αp,Dq) и wDmn(αp,Dq) соответственно, накопленные за заданное время Тн так, как если бы источник и ПС были неподвижны, и определяют координаты максимума сигнальной отметки на индикаторе α и D по ее положению на координатных шкалах индикатора.
Недостатком данного способа является то, что в нем используется статическое накопление, жестко привязанное к координатной сетке индикатора, и при движущемся источнике и/или носителе приемной системы и большом времени накопления Tн возникают значительные динамические ошибки определения координат из-за инерционности накопителя, зависящие от скорости относительного перемещения источника и приемников.
Задачей изобретения является пассивное определение координат М антенной приемной системой в зоне Френеля движущегося источника излучения без инерционных ошибок определения координат, зависящих от скорости относительного перемещения источника и приемников.
Техническим результатом предлагаемого изобретения является повышение точности определения координат движущегося источника излучения без ошибок, зависящих от скорости относительного перемещения источника и приемников при произвольном количестве антенн (М≥3) и при произвольном, известном их размещении в пространстве, причем при увеличении количества антенн М>3 преимущества предлагаемого способа увеличиваются.
Для обеспечения указанного технического результата в способ пассивного определения координат источников излучения, содержащий прием сигналов М антеннами, М≥3, расположенными в пространстве известным образом, синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование (ДПФ) выборок сигналов антенн объемом NПФ в массивы спектральных частотных отсчетов Xm(ƒk) в полосе приема ƒн≤ƒk≤ƒв (преобразование Фурье), индикацию результатов обзора на координатной сетке «направление-дальность» с определением максимума сигнальной отметки α0, D0 по ее положению на координатных шкалах индикатора обзора, введены следующие новые признаки.
Для определения текущих координат αs(t), Ds(t) движущегося источника с реализацией необходимого заданного времени осреднения оценок Tн без потери точности из-за инерционности устройства статического осреднения используют временные последовательности предварительных малоосредненных оценок координат αi*, Di*, (i=1, 2, …, I), заданного объема I(Тн), при получении которых на каждом i-м шаге используют малое статическое осреднение - один или несколько циклов ДПФ: j=1, 2, …, J, за время которых изменением измеряемых координат можно пренебречь, а требуемое время осреднения Тн достигается путем дальнейшего динамического сглаживания полученных последовательностей.
Для определения αi*, Di* на каждом i-м шаге последовательности назначают опорную точку (ОТ) с координатами предполагаемого местоположения источника αопi, Dопi и по принятым антеннами сигналам определяют оценки отклонения δαi, δDi координат ОТ от искомых текущих координат αs(ti), Ds(ti) источника соответственно, для чего фазируют каждую m-ю антенну в направлении αmопi от ее центра на ОТ, определяя это направление по формулам тригонометрии с использованием координат ОТ αопi, Dопi и известных координат центров антенн. Формируют mn-е пары антенн, с m, n=1, …, М, при m<n, всего (М2-М)/2=Мп пар с неповторяющимися индексами mn, определяют малоосредненные оценки αi*, Di*, корректируя αопi, Dопi на величину δαi, δDi соответственно, а текущие координаты источника излучения αs(ti), Ds(ti) на момент i-го шага ti и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й шаг определяют по результатам динамического сглаживания последовательностей предыдущих малоосредненных оценок координат αk*, Dk*, (k=i, (i-1), (i-2), …, (i-I). На первом шаге (i=1), т.е. в начале формирования последовательности малоосредненных оценок координат αi*, Di* в качестве координат ОТ используют α0, D0 с индикатора обзора.
Для получения отклонения δαi направления на назначенную ОТ αопi от искомого текущего направления αs(ti), на каждом j-м цикле ДПФ определяют комплексные взаимные спектры плотности мощности (ВСПМ) сигналов всех Мп пар антенн и суммируют по частоте ƒk мнимые части ВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент еkmni компенсации разности времен распространения сигнала от ОТ к центрам антенн каждой mn-й пары - τmni(αопi, Dопi), определяя эту разность по формулам тригонометрии с использованием координат ОТ i-го шага, координат центров антенн и скорости распространения сигнала с:
ekmni(τmni(αопi,Dопi))=exp(-j2πƒk(tmопi-tnопi)), где tmопi, tnопi - время распространения сигнала от ОТ к центрам m-й и n-й антенн соответственно.
В результате получают для каждой mn-й пары суммарные величины c1mnjj j-го цикла ДПФ на i-м шаге.
Затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты ƒk2, получая для каждой пары суммарную величину c2mnij.
Затем определяют оценку δαij j-го цикла на i-м шаге, для чего суммируют по индексу mn величины c1mnij с весовыми коэффициентами wαmni, равными производной по α разности времен распространения  , получая величину c1ij, которую делят на сумму по индексу mn величин c2mnij с тем же весовым коэффициентом в квадрате w2αmni - c2ij, получая δαij. Выполняют статическое осреднение этих оценок отклонения δαij по заданному числу циклов ДПФ j=1, 2, … J, получая малоосредненную оценку δαi,
, получая величину c1ij, которую делят на сумму по индексу mn величин c2mnij с тем же весовым коэффициентом в квадрате w2αmni - c2ij, получая δαij. Выполняют статическое осреднение этих оценок отклонения δαij по заданному числу циклов ДПФ j=1, 2, … J, получая малоосредненную оценку δαi,
Для определения малоосредненной оценки отклонения δDij на j-м цикле ДПФ i-го шага, используя Мп нечетных попарных взаимно корреляционных функций (НВКФ) сигналов антенн  на дискретной шкале задержек τ. Для этого комплексные частотные элементы ВСПМ каждой mn-й пары антенн j-го цикла умножают на коэффициент частотной характеристики hk и на частоту ƒk, выполняют их осреднение за J циклов ДПФ, отдельно для реальной и мнимой части, и применяют обратное преобразование Фурье, получая
на дискретной шкале задержек τ. Для этого комплексные частотные элементы ВСПМ каждой mn-й пары антенн j-го цикла умножают на коэффициент частотной характеристики hk и на частоту ƒk, выполняют их осреднение за J циклов ДПФ, отдельно для реальной и мнимой части, и применяют обратное преобразование Фурье, получая  . При этом для увеличения точности последующего считывания преобразуемые последовательности дополняют нулями до 2NПФ, 4NПФ, 8NПФ … gNПФ, получая промежуточные отсчеты
. При этом для увеличения точности последующего считывания преобразуемые последовательности дополняют нулями до 2NПФ, 4NПФ, 8NПФ … gNПФ, получая промежуточные отсчеты  на дискретной шкале временных задержек τ=τq. Для определения отклонения по дальности δDi измеряют величину z(D) и находят положение ее нулевого значения на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi. Для этого сканируют значение дальности D=Dp по p=±1, 2, … в окрестностях Dопi, определяя в каждой точке сканирования значения τmni(αопi, Dp) по формулам тригонометрии с использованием координат ОТ i-го шага, координат центров антенн и скорости распространения сигнала с, весовые коэффициенты wDmnip, равные производной
на дискретной шкале временных задержек τ=τq. Для определения отклонения по дальности δDi измеряют величину z(D) и находят положение ее нулевого значения на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi. Для этого сканируют значение дальности D=Dp по p=±1, 2, … в окрестностях Dопi, определяя в каждой точке сканирования значения τmni(αопi, Dp) по формулам тригонометрии с использованием координат ОТ i-го шага, координат центров антенн и скорости распространения сигнала с, весовые коэффициенты wDmnip, равные производной  по D и измеряя величину z(Dp) в каждой точке сканирования путем считывания Мп значений в точках τ=τmni(αопi, Dp), и суммирования их по индексу mn с весовым коэффициентом wDmnip. Если при считывании значения τmni(αопi, Dp) не совпадают с дискретными значениями τq шкалы временных задержек, т.е. τmni(αопi, Dp)≠τq, то применяют интерполяцию между дискретными значениями τq. Сканирование продолжают пока не находят положение нулевого значения zi(D) на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi.
по D и измеряя величину z(Dp) в каждой точке сканирования путем считывания Мп значений в точках τ=τmni(αопi, Dp), и суммирования их по индексу mn с весовым коэффициентом wDmnip. Если при считывании значения τmni(αопi, Dp) не совпадают с дискретными значениями τq шкалы временных задержек, т.е. τmni(αопi, Dp)≠τq, то применяют интерполяцию между дискретными значениями τq. Сканирование продолжают пока не находят положение нулевого значения zi(D) на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi.
В начале формирования последовательностей малоосредненных оценок α*i и D*i получение динамически сглаженных оценок по I шагам начинают со второго шага, i=2 и далее, полагая на каждом последующем шаге I=i вплоть до i=I(Tн), после чего объем последовательности фиксируется I=I(Tн) - установившийся режим, добавляя в последовательности на каждом шаге новые значения и забывая самые старые, а процедура сглаживания выполняется на каждом i-м шаге по последовательности предыдущих I(Тн) шагов малоосредненных оценок.
Для динамического сглаживания используют известные методы, например метод наименьших квадратов определения параметров последовательности фиксированного размера I, с определением производных и прогнозом по времени, либо рекуррентными методами.
Введение новых признаков позволяет повысить точность определения координат движущегося источника излучения пассивной приемной системой путем уменьшения ошибок, связанных с «инерционностью» статического осреднения, зависящих от скорости относительного перемещения источника и приемников.
Сущность предлагаемого изобретения поясняется фиг. 1-6, где обозначено:
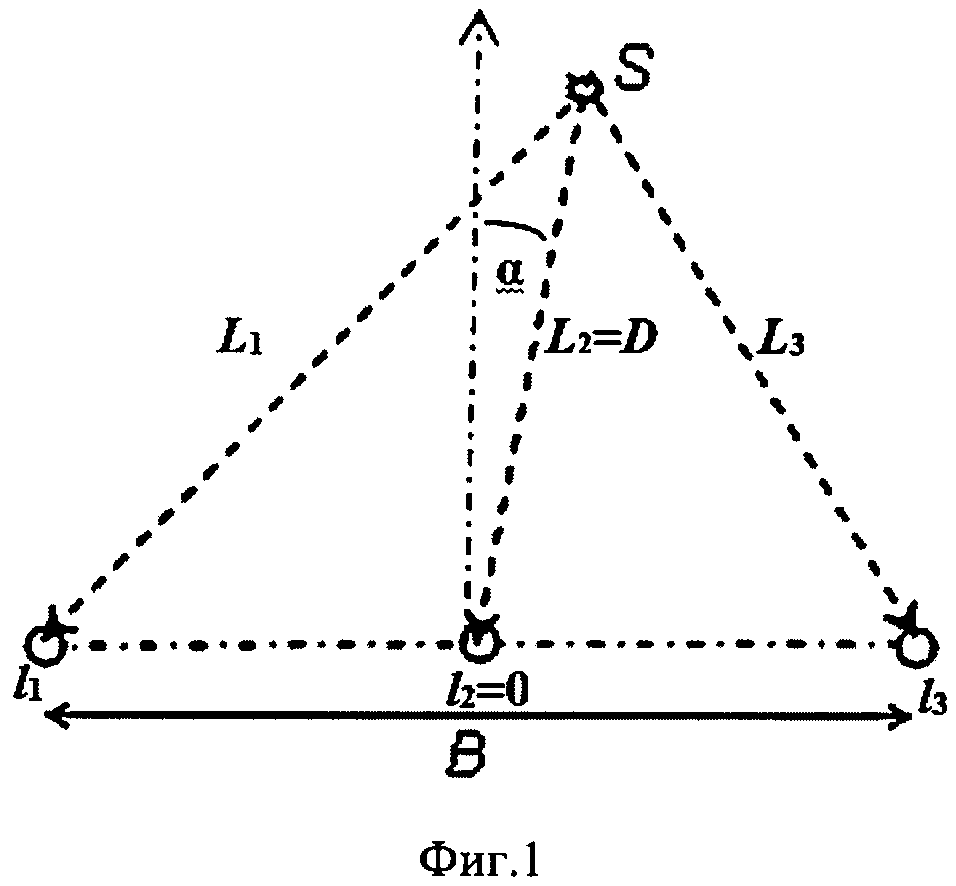
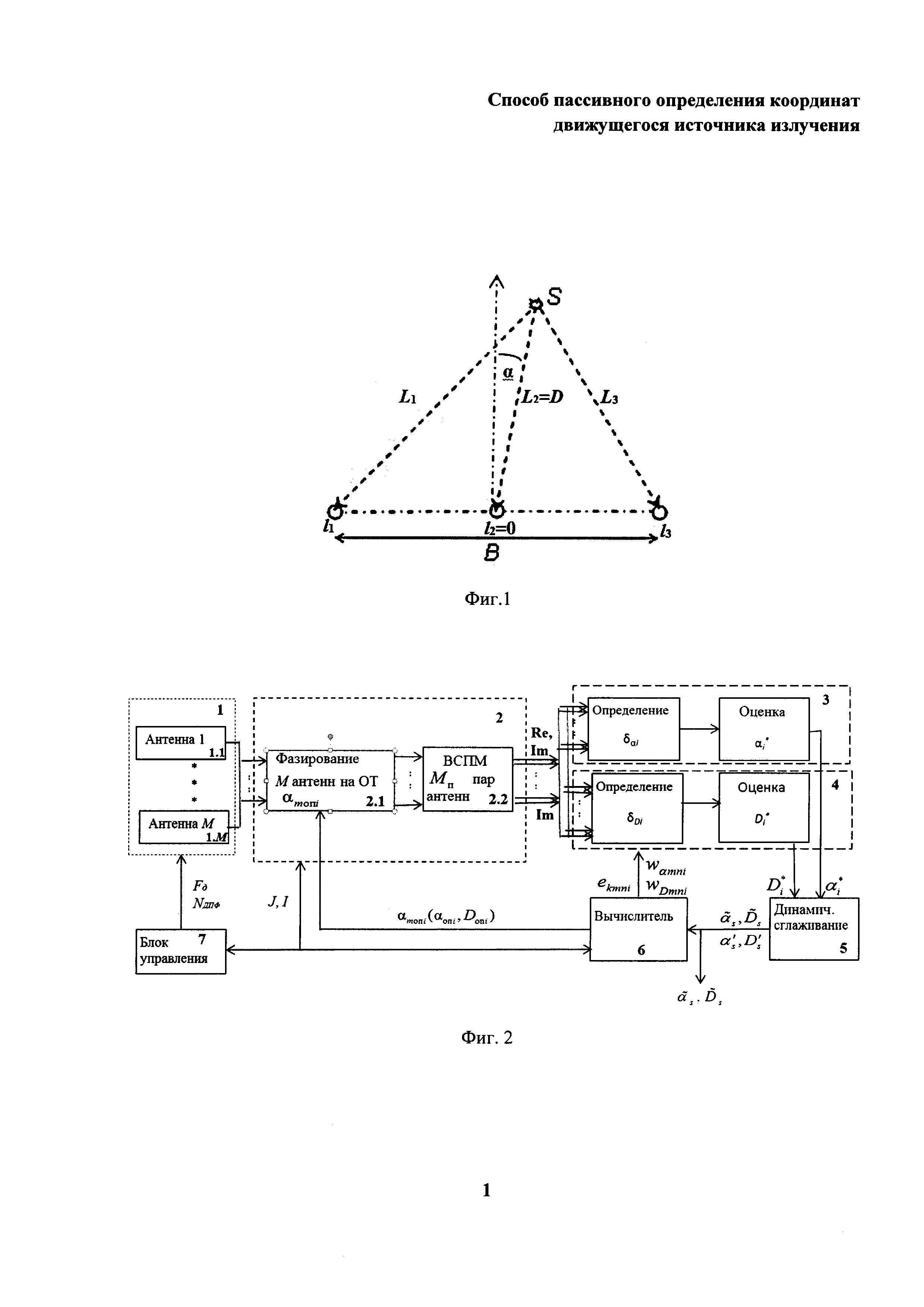
Фиг. 1 Геометрическая схема системы «источник-антенны» для ПС из 3-х антенн; Фиг. 2 Пример блок-схемы устройства, реализующего предлагаемый способ; Фиг. 3 Схема блока определения отклонения по направлению опорной точки от искомой текущей координаты и малоосредненной оценки направления; Фиг. 4 Схема блока определения отклонения по дальности опорной точки от искомой текущей координаты и малоосредненной оценки дальности; Фиг. 5 Типичные графики: a - фрагмент величины c1i(α-αоп), пропорциональной отклонению по направлению δαij в пределах линейного участка, отмеченного пунктирными линиями, б - фрагмент рабочего участка величины z(D-Dоп) в функции отклонения от Dоп; Фиг. 6 Индикаторная картина обзора известного устройства [3] в координатах направление-дальность с сигнальной отметкой (a), ее максимумом (α0, D0), трассой динамического сглаживания двух координат движущегося источника по предлагаемому способу (б), и графиками величин, пропорциональных текущему отклонению от ОТ по направлению с1(α) (в - под картиной) и по дальности z(D) (г - справа от картины).
Принцип действия предлагаемого изобретения можно пояснить на примере двухкоординатной задачи с тремя линейно расположенными антеннами А1, А2, А3, как показано на схеме Фиг. 1, где приведено изображение геометрии системы «источники-приемники» при локации источника в поле наблюдения «направление (α) - дальность (D)», когда источники и приемники находятся в одной плоскости на одной линии. За начало координат принята точка расположения центра центральной антенны А2. Антенны расположены на оси x с известными координатами l1, l2=0, l3, тогда L1, L2, L3 - траектории сигнала от источника S к антеннам А1, А2, А3 соответственно. Тогда попарные разности времен распространения сигнала τmn к каждой m-й антенне и каждой другой n-й антенне (здесь m, n=1, 2, 3) из точки поля наблюдения с координатами αS, DS равны: τ12(αS, DS)=(L1-L2)/c, τ13(αS, DS)=(L1-L3)/с, τ23(αS, DS)=(L2-L3)/с, где с - скорость распространения сигнала. В более общем случае - произвольного расположения антенн в пространстве, координаты их центров представлены вектором:  или
или  и др. и расчет разностей хода сигнала излучателя к антеннам l12, l13, l23 решается аналогичным образом, по формулам тригонометрии.
и др. и расчет разностей хода сигнала излучателя к антеннам l12, l13, l23 решается аналогичным образом, по формулам тригонометрии.
Предложенный способ может быть реализован с помощью устройства, представленного на фиг. 2-4. Устройство (фиг. 2) содержит известные элементы и блоки по предлагаемому способу: приемную систему 1 из М антенн 1.1÷1.М, блок фазирования 2 (известными методами предварительной обработки и формирования направленности антенн), блоки определения малоосредненных оценок координат 3 и 4 (по предлагаемому способу, пп. 2 и 3 Формулы), блок динамического сглаживания 5 (программируемый процессор), вычислитель 6 (программируемый процессор) и блок управления 7 (программируемый контроллер).
Блок 1 включает М антенн, а также элементы предварительной обработки, управляемые из блока 7: синхронную дискретизацию с частотой F∂, цифровое преобразование, циклическое дискретное преобразование Фурье (ДПФ) выборок объема NДПФ сигналов с выходов антенн.
Блок 2 включает модуль 2.1 фазирования антенн в направлениях от центра антенны на опорную точку (ОТ) αmопi, m=1÷М, и модуль 2.2 формирования mn-х пар антенн и определения комплексных взаимных спектров плотности мощности (ВСПМ) их сигналов.
Пример реализации блока 3 оценки отклонения ОТ от искомого направления и малоосредненной оценки координаты  , показан на фиг. 3, где: 3.1 - модуль суммирования по частоте мнимых элементов ВСПМ для каждой пары антенн с умножением на hk, ƒk и ekmnij (здесь и далее в скобках указан блок или модуль, из которого поступают данные или куда отправляются); 3.2 - модуль суммирования по индексу mn с весовым коэффициентом wαmni - получение величины c1ij, пропорциональной оцениваемому отклонению; 3.3 - модуль суммирования по частоте вещественных элементов ВСПМ для каждой пары антенн с умножением на hk, ƒk2 и ekmnij; 3.4 - модуль суммирования по индексу mn с весовым коэффициентом w2αmni - получение нормирующей величины c2ij; 3.5 - модуль оценки отклонения δαij путем нормирования c1ij на с2ij; 3.6 - малое осреднение оценки отклонения по j; 3.7 - оценка (малоосредненная) направления путем корректировки опорной точки на величину отклонения.
, показан на фиг. 3, где: 3.1 - модуль суммирования по частоте мнимых элементов ВСПМ для каждой пары антенн с умножением на hk, ƒk и ekmnij (здесь и далее в скобках указан блок или модуль, из которого поступают данные или куда отправляются); 3.2 - модуль суммирования по индексу mn с весовым коэффициентом wαmni - получение величины c1ij, пропорциональной оцениваемому отклонению; 3.3 - модуль суммирования по частоте вещественных элементов ВСПМ для каждой пары антенн с умножением на hk, ƒk2 и ekmnij; 3.4 - модуль суммирования по индексу mn с весовым коэффициентом w2αmni - получение нормирующей величины c2ij; 3.5 - модуль оценки отклонения δαij путем нормирования c1ij на с2ij; 3.6 - малое осреднение оценки отклонения по j; 3.7 - оценка (малоосредненная) направления путем корректировки опорной точки на величину отклонения.
В блоке 4 определяется отклонение по дальности опорной точки от искомой дальности и формируется малоосредненная оценка координаты  , пример реализации которых показан на Фиг. 4, где: 4.1 - модуль умножения частотных комплексных элементов ВСПМ пар антенн на на hk, ƒk; 4.2 - модуль осреднения ВСПМ, отдельно реальных и мнимых частей ВСПМ; 4.3 - обратное преобразование Фурье Мп массивов ВСПМ с дополнением нулями до объема gNПФ; 4.6 - сканирование по D=Dp с пересчетом τmni(αопi, Dp) и весовых коэффициентов wDmnip и считыванием в блоке 4.4 значений
, пример реализации которых показан на Фиг. 4, где: 4.1 - модуль умножения частотных комплексных элементов ВСПМ пар антенн на на hk, ƒk; 4.2 - модуль осреднения ВСПМ, отдельно реальных и мнимых частей ВСПМ; 4.3 - обратное преобразование Фурье Мп массивов ВСПМ с дополнением нулями до объема gNПФ; 4.6 - сканирование по D=Dp с пересчетом τmni(αопi, Dp) и весовых коэффициентов wDmnip и считыванием в блоке 4.4 значений  . В модуле 4.5 выполняется суммирование по индексу mn с умножением слагаемых на весовой коэффициент wDmnip, получая значение величины z(Dp) и в модуле 4.7 фиксируется достижение нулевого значения z(Dp)=0, отстояние нулевого значения которой на шкале D от Dопi соответствует оцениваемому отклонению дальности ОТ от искомой координаты источника.
. В модуле 4.5 выполняется суммирование по индексу mn с умножением слагаемых на весовой коэффициент wDmnip, получая значение величины z(Dp) и в модуле 4.7 фиксируется достижение нулевого значения z(Dp)=0, отстояние нулевого значения которой на шкале D от Dопi соответствует оцениваемому отклонению дальности ОТ от искомой координаты источника.
В блоке 5 выполняется динамическое сглаживание малоосредненных оценок координат  и
и  , объема I каждая, с основным осреднением оценок за заданное время Tн и определением их производных для прогноза ОТ на следующий шаг.
, объема I каждая, с основным осреднением оценок за заданное время Tн и определением их производных для прогноза ОТ на следующий шаг.
В качестве примера реализации динамического сглаживания приведем простой вариант определения двух параметров последовательности измерений объема I: сглаженного значения на момент последнего измерения, производной и прогноза на следующий шаг последовательности. Данными для сглаживания является последовательность Y=[Y1, Y2, … YI] объема I. Сглаженное значение и производная на i-м шаге, обозначим их θi и  , соответственно равны:
, соответственно равны:
 ;
;  .
.
Прогноз значения Y на следующий (i+1)-й шаг:  .
.
В блоке 6 (программируемый процессор) с управлением из блока 7 вычисляются необходимые текущие данные: направления фазирования антенн αmопi, разности времен распространения сигнала от ОТ к центрам каждой пары антенн τmni, коэффициентов компенсации еkmni и весовых коэффициентов wαmni и wDmni. В качестве иллюстрации приведем расчет τmn и wα, wD на простом примере. Если lm и ln - координаты центров m-й и n-й антенн относительно начала координат, расположенного в центре базы и в центре антенны А2, как на фиг. 1, то для траверзного расположения источника α=0 разность времен распространения τmn от источника до этих приемников и производные по направлению ∂τmn/∂α=wαmn и дальности ∂τmn/∂D=wDmn, имеют простой вид:
τmn=1/c⋅(Lm-Ln), где  ,
,
 ,
,  ,
,
где с - скорость распространения сигнала в среде.
В общем случае - трехкоординатной задачи: «азимут, угол места, дальность» [α, θ, D], действия выполняются аналогично описанным ниже для любой пары координат при фиксированном значении третьей координаты: [α, θ, D=const], [α, D, θ=const], [θ, D, α=const]. Выбор фиксированного значения третьей координаты определяется конкретным применением: либо оно известно по условиям задачи, либо задается рядом значений с переключением с одного на другое, либо задача решается параллельно для нескольких заданных значений, например, для веера характеристик направленности в вертикальной или горизонтальной плоскости, последовательности значений одной из координат и пр.
Блок 7 (программируемый контроллер) - блок управления синхронным АЦП, циклами ДПФ, формированием последовательностей малоосредненных оценок и динамическим сглаживанием.
С помощью рассмотренного устройства предложенный способ осуществляется следующим образом. В начальный момент i=1 последовательного определения текущих координат источника назначают опорную точку (ОТ) - место предполагаемого расположения источника, используя данные обзора (см., например, [3]) или других средств наблюдения. Все антенны (блок 1) фазируют в направлении на эту точку в блоке 2, где также формируют их выходы в Мп=(М2-М)/2 пар с неповторяющимися индексами mn и на каждом j-м цикле ДПФ определяют их ВСПМ.
В блоке 3 определяют величину отклонения δαi направления на ОТ αопi от искомого текущего направления на источник αs(ti), фиг. 5,а, для чего в блоке 3.1 суммируют по частоте мнимые части ВСПМ с умножением на hk, ƒk ekmni, а в блоке 3.2 суммируют по индексу mn с умножением на весовой коэффициент wαmni, получая величину с1ij, пропорциональную искомому отклонению. В блоке 3.3 суммируют по частоте вещественные части ВСПМ с умножением на hk, ƒk2, ekmni, а в блоке 3.2 суммируют по индексу mn с умножением на весовой коэффициент wαmni, получая нормирующую величину c2ij, в результате чего в блоке 3.5 получают оценку отклонения направления на j-м цикле ДПФ i-го шага δαij, которую осредняют по заданному числу J циклов ДПФ (3.6), получая малоосредненную оценку отклонения δαi (3.6). Корректируя направление на опорную точку на величину δαi (блок 3.7), получают малоосредненную оценку направления i-го шага  .
.
Определяют величину отклонения δDi, дальности до ОТ Dопi от искомой текущей дальности до источника  i-го шага (блок 4), для чего в блоке 4.1 на каждом цикле ДПФ для всех пар антенн умножают комплексные элементы ВСПМ на hk и ƒk и осредняют по заданным J циклам ДПФ в блоке 4.2, отдельно вещественные и мнимые части. Полученные массивы для каждой пары антенн подвергают обратному преобразованию Фурье (ОДПФ) в блоке 4.3, дополняя массивы нулями до объема gNпф, получая массивы НВКФ
i-го шага (блок 4), для чего в блоке 4.1 на каждом цикле ДПФ для всех пар антенн умножают комплексные элементы ВСПМ на hk и ƒk и осредняют по заданным J циклам ДПФ в блоке 4.2, отдельно вещественные и мнимые части. Полученные массивы для каждой пары антенн подвергают обратному преобразованию Фурье (ОДПФ) в блоке 4.3, дополняя массивы нулями до объема gNпф, получая массивы НВКФ  для каждой mn-й пары антенн. Величина g задается исходя из необходимой точности последующего считывания в блоке 4.4, которая определяется расчетом, моделированием или экспериментально. Далее определяют отклонение дальности δDi или сразу
для каждой mn-й пары антенн. Величина g задается исходя из необходимой точности последующего считывания в блоке 4.4, которая определяется расчетом, моделированием или экспериментально. Далее определяют отклонение дальности δDi или сразу  по нулевому отсчету величины zi(D), значение которой равно нулю в точке
по нулевому отсчету величины zi(D), значение которой равно нулю в точке  (в окрестностях D=Dопi, как показано на фиг. 5,б). Зависимость zi(D) в любой точке Dp определяется как сумма по индексу mn значений , считанных в точках τ=τmni(αопi, Dp) (блок 4.4) с умножением каждого слагаемого на весовой коэффициент wDmnip в цикле сканирования Dp по p в окрестностях D=Dопi (блок 4.6).
(в окрестностях D=Dопi, как показано на фиг. 5,б). Зависимость zi(D) в любой точке Dp определяется как сумма по индексу mn значений , считанных в точках τ=τmni(αопi, Dp) (блок 4.4) с умножением каждого слагаемого на весовой коэффициент wDmnip в цикле сканирования Dp по p в окрестностях D=Dопi (блок 4.6).
При достижении условия  сканирование останавливается и принимается
сканирование останавливается и принимается  и
и  .
.
Полученные на i-м шаге малоосредненные оценки , записываются в две последовательности заданного объема I(Tн), каждая, и подвергаются динамическому сглаживанию с получением сглаженных оценок текущих значений координат  ,
,  и прогноза координат ОТ на следующий шаг.
и прогноза координат ОТ на следующий шаг.
Фиг. 5 поясняет метод определения отклонения направления на ОТ αоп от искомого неизвестного направления δα: (а) - график величины c1(α-αопi, Dопi) в зависимости от α-αопi с линейным участком (обозначенным пунктирными линиями), в пределах которого δα определяется путем деления c1(αi)/c2(αi), более полно этот график показан на фиг. 6в; (б) - фрагмент графика величины z(D-Dопi, αопi), отстояние нулевого значения которой на шкале D от Dопi соответствует оценке δD отклонения ОТ от искомой точки Ds, более полно этот график показан на фиг. 6,г.
Работоспособность предлагаемого способа подтверждена моделированием и экспериментами [5]. В качестве примера на фиг. 6 показана индикаторная картина по известному устройству [3] в координатах направление - дальность [α=25°-30°, D=500-3000 м] с сигнальной отметкой (1) с координатами α0, D0, трассой динамического сглаживания координат движущегося источника излучения (2) и графиками c1(α, D0), под картиной и z(D, α0), справа от картины во всем секторе направлений и интервале дальностей.
Источники информации
1. Лоскутова Г.В., Полканов К.И. Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей. СПб.: «Наука». 2007.
2. Кузьмин С.З. Цифровая обработка радиолокационной информации. М: Сов. радио. 1967.
3. Способ пассивного определения координат источников излучения. Патент №2507531. Россия. ОАО «Концерн «Океанприбор». МПК J01S 3/80. Приоритет 08.11.2012, зарегистрирован 20.02.14 г.
4. Заездный A.M. Основы расчетов по статистической радиотехнике. М.: «Связь». 1969. С. 167.
5. Л.Е. Гампер. О пространственных характеристиках трехмерной разнесенной акустической системы. Натурные испытания. Докл. XI школы-семинара им. акад. Л.М. Бреховских "Акустика океана" и XVII сессия Российского Акустического общества, май 2006 г. М.: ГЕОС, 2006.











Способ изготовления спиралевидного многогранного змеевика теплообменника из толстостенных жаропрочных труб
Способ построения автоматизированной системы, реализующей принципы виртуализации рабочих мест и изоморфного масштабирования
Способ построения иерархической системы сетевого взаимодействия виртуальных рабочих мест
Способ пассивного определения координат источников излучения
Волновая антенная решетка
Активная фазированная антенная решетка
Сталь
Сталь
Антенный модуль с цифровым выходом
Устройство для подводного рентгенофлуоресцентного анализа
Способ изготовления спиралевидного многогранного змеевика теплообменника из толстостенных жаропрочных труб
Способ построения автоматизированной системы, реализующей принципы виртуализации рабочих мест и изоморфного масштабирования
Способ построения иерархической системы сетевого взаимодействия виртуальных рабочих мест
Способ чистовой обработки зубьев эвольвентных шлицевых валов
Способ пассивного определения координат источников излучения
Волновая антенная решетка
Активная фазированная антенная решетка
Сталь
Сталь
Антенный модуль с цифровым выходом

