Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к способам управления движением ракет космического назначения (РКН) на участке полета в атмосфере.
В ракетной технике известен выбранный в качестве прототипа способ управления движением РКН в атмосфере, заключающийся в управлении углами тангажа и рыскания путем отклонения в двух взаимно-перпендикулярных плоскостях установленной в карданном подвесе камеры сгорания основного двигателя и в управлении углом крена с помощью двух пар газовых сопел и двух аэродинамических рулей, отклоняемых с помощью своих электрогидравлических сервоприводов (см. [1], стр. 28).
Известный способ управления оказывается неработоспособным в случае отказа какого-либо из электрогидравлических сервоприводов (ЭГС) аэродинамических рулей (АР) с выходом штока ЭГС «на упор» (когда шток ЭГС оказывается предельно выдвинут или втянут и в дальнейшем остается в этом положении). Такие отказы могут быть вызваны заклиниванием золотника гидроусилителя ЭГС, засорением сопла электромеханического преобразователя и др. При этом АР, отклоняемый отказавшим ЭГС, оказывается отклоненным на максимальный угол, соответствующий предельному положению штока ЭГС. В этом случае создаются действующие на РКН значительные возмущающие моменты по крену и тангажу, которые приводят к потере управляемости движения и, как следствие, к аварийной ситуации.
Задачей предложенного изобретения является разработка способа управления угловым движением РКН, обеспечивающего возможность продолжения управляемого полета РКН при отказе ЭГС одного из аэродинамических рулей.
Техническим результатом предлагаемого изобретения является повышение «живучести» РКН, т.е. повышение вероятности успешного завершения полета РКН в случае отказа одного из исполнительных органов системы управления.
Указанный технический результат достигается тем, что в способе управления угловым движением ракеты космического назначения, заключающемся в управлении углами тангажа и рыскания путем отклонения в двух взаимно-перпендикулярных плоскостях установленной в карданном подвесе камеры сгорания основного двигателя, в управлении углом крена с помощью двух пар газовых сопел и двух аэродинамических рулей, отклоняемых с помощью своих электрогидравлических сервоприводов, в соответствии с изобретением, на участке управления углом крена с использованием аэродинамических рулей периодически измеряют фактические углы их отклонения от нейтрального положения, определяют рассогласования между командным сигналом на отклонение аэродинамических рулей и фактическими углами их отклонения, при превышении по абсолютной величине любым из двух рассогласований заранее выбранного предельно-допустимого значения формируют признак отказа электрогидравлического сервопривода того аэродинамического руля, чье рассогласование превысило по абсолютной величине предельно-допустимое значение, и в случае формирования признака отказа ЭГС дополнительно отклоняют камеру сгорания основного двигателя по тангажу и аэродинамический руль с исправным ЭГС, на углы, пропорциональные фактическому углу отклонения аэродинамического руля с отказавшим электрогидравлическим сервоприводом, и дополнительно управляют углом рыскания с помощью пар газовых сопел, создающих управляющий момент рыскания.
Сущность предлагаемого изобретения иллюстрируется фиг. 1-3.
Фиг. 1. Органы управления угловым движением РКН.
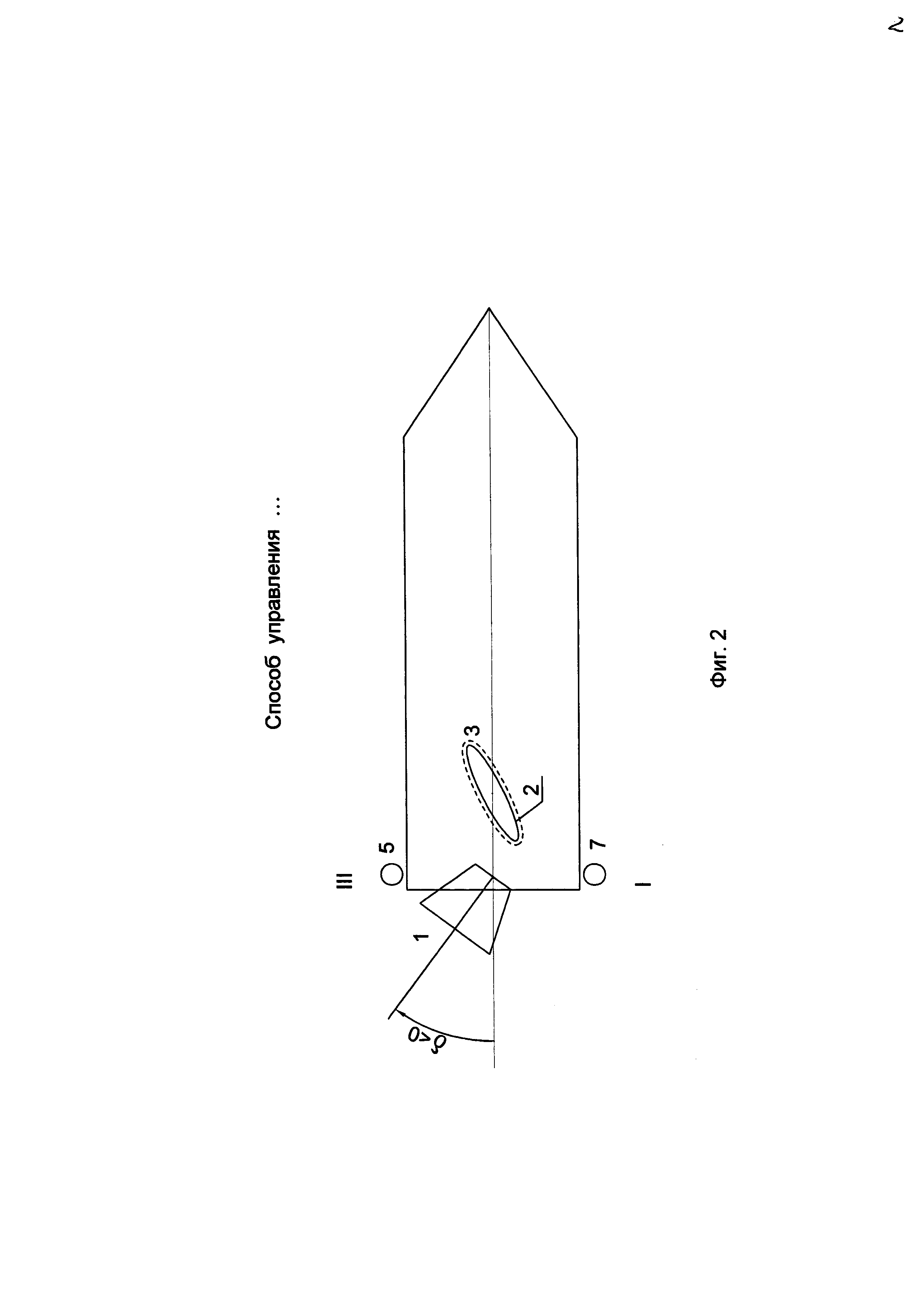
Фиг. 2. Положение аэродинамических рулей при отказе ЭГС одного из них.
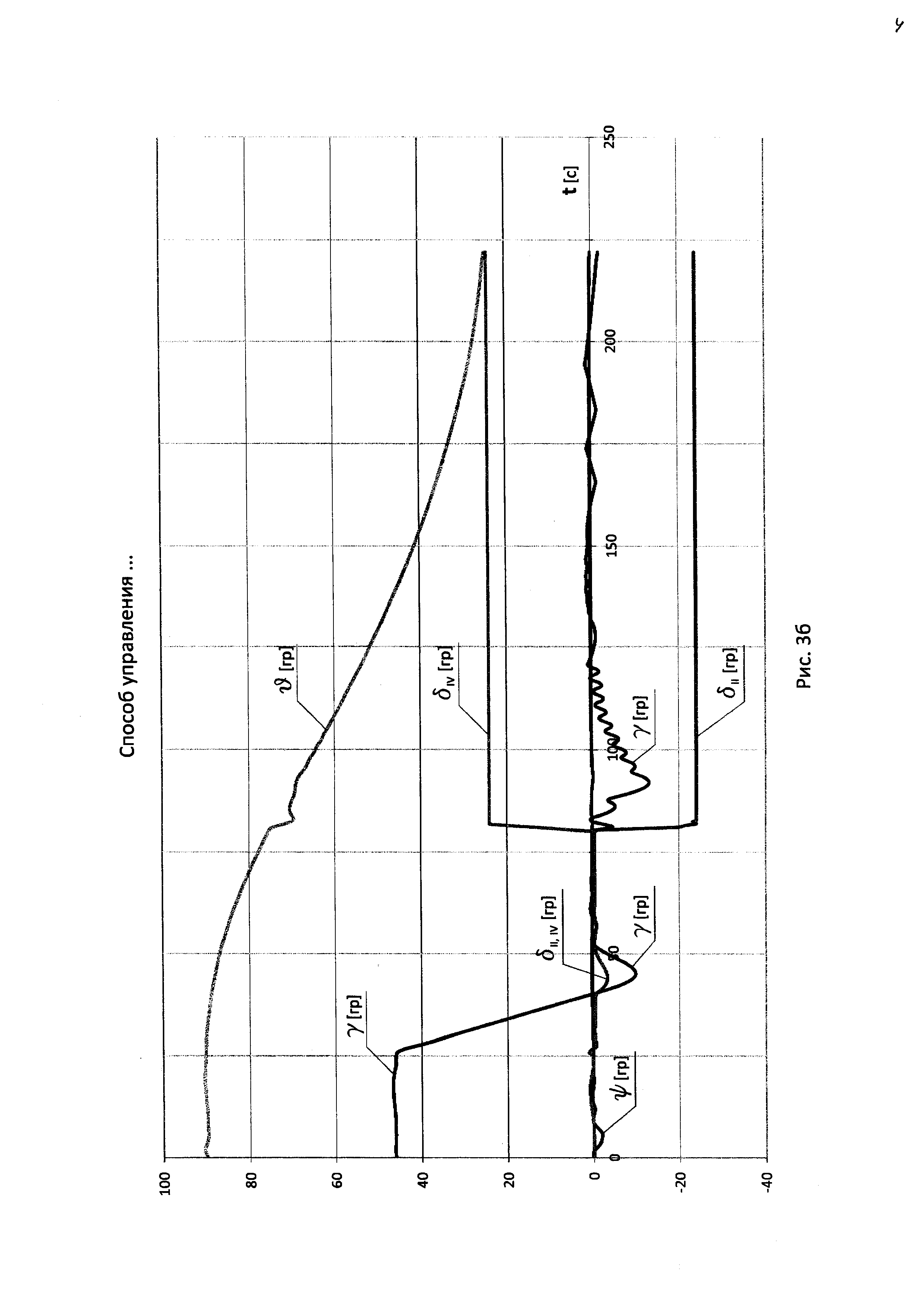
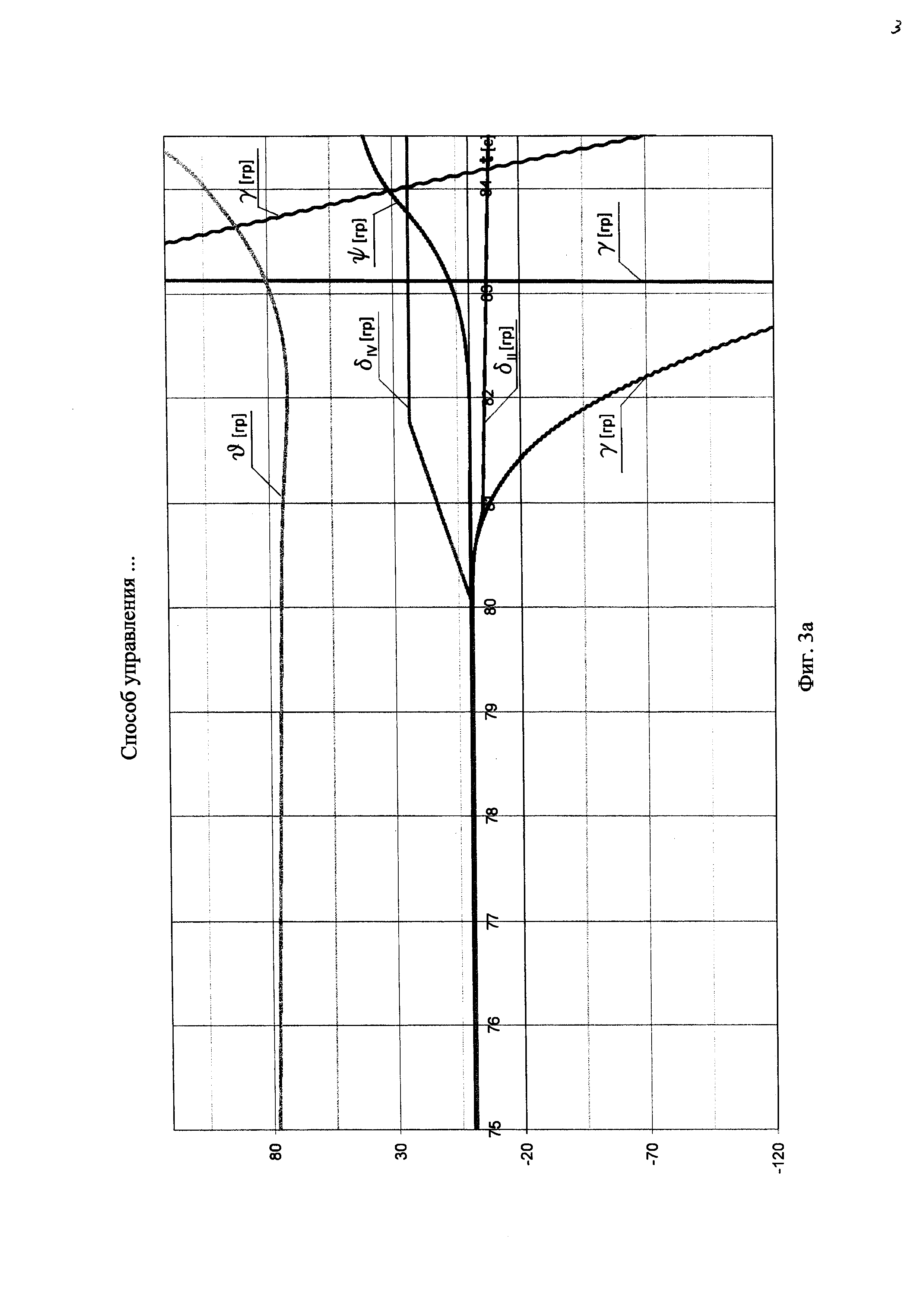
Фиг. 3. Результаты моделирования отказа ЭГС одного АР. Зависимости основных параметров движения от времени а) при использовании известного способа управления; б) при использовании предлагаемого способа.
В качестве примера рассмотрим возможную реализацию предлагаемого способа управления на РКН легкого класса типа корейской ракеты «КСЛВ-I». Камера сгорания с соплом 1 основного двигателя I ступени этой РКН установлена в карданном подвесе (см. фиг. 1). Управление движением РКН по тангажу и рысканию осуществляется путем отклонения камеры сгорания основного двигателя в двух взаимно-перпендикулярных плоскостях. Кроме того, на РКН установлены 4 газовых сопла 4, 5, 6 и 7, установленные в плоскости тангажа I-III. Для управления углом крена при малых значениях скоростного напора воздушного потока эти сопла включаются парами: 4, 7 или 5, 6. Однако, управляющего момента по крену, создаваемого этими газовыми соплами, недостаточно при движении с достаточно большой скоростью в плотных слоях атмосферы, когда на РКН действуют существенные возмущающие аэродинамические моменты. Поэтому, при значительных значениях скоростного напора вместо газовых сопел для управления углом крена используются аэродинамические рули 3 и 2, установленные соответственно в полуплоскостях II и IV плоскости рыскания. Каждый из АР отклоняется с помощью своего электрогидравлического сервопривода на угол в диапазоне ±24°. Направления положительных отклонений АР показаны на фиг. 1.
В случае отказа одного из АР с его уходом на «упор» в 24°, на РКН начинают действовать возмущающие моменты, главным образом по крену и тангажу. Это приводит к тому, что при значительных значениях скоростного напора РКН может потерять управляемость. На фиг. 3а для примера показаны результаты математического моделирования отказа АР, установленного в IV полуплоскости, на 80 с полета (на фиг. 3а и 3б t - время от команды «Контакт подъема», ϑ - угол тангажа, ψ - угол рыскания, γ - угол крена, δII и δIV - углы отклонения АР, установленных во II и IV полуплоскостях соответственно). Как видно из фиг. 3а, возмущающий момент по крену, возникший из-за выхода АР на предельно-допустимый угол, привел к «закрутке» РКН по крену и, в конечном счете, к аварийному прекращению полета.
В случае использования предлагаемого способа управления периодически (например, с тактом работы бортовой цифровой вычислительной машины) измеряются фактические углы отклонения аэродинамических рулей от нейтрального положения. Эти измерения могут осуществляться с использованием потенциометрических, индукционных и др. датчиков обратной связи, установленных на осях вращения АР. Фактические углы отклонения АР сравниваются с командным сигналом на их отклонение, выработанным автоматом стабилизации системы управления. Если рассогласование (разность) между фактическим и командным сигналом отклонения какого-либо АР превосходит по абсолютной величине заранее выбранное предельно-допустимое значение, электрогидравлический сервопривод этого АР признается отказавшим (в автомате стабилизации формируется признак отказа ЭГС соответствующего АР). В соответствии с изобретением, после формирования признака отказа ЭГС одного из АР, к командному сигналу от автомата стабилизации, поступающему на исправный ЭГС другого АР, добавляется сигнал, пропорциональный фактическому углу отклонения АР с отказавшим ЭГС. Если коэффициент пропорциональности выбрать равным - 1, то, т.к. обычно командный сигнал на исправный ЭГС от автомата стабилизации составляет доли градуса, оба АР (2 и 3) после формирования признака отказа займут практически симметричное относительно плоскости I-III положение (см. фиг. 2). При этом возмущающий момент по крену, действующий на РКН, будет минимальным. Однако в этом случае от отклонения АР возникнет возмущающий момент по тангажу. Для его парирования необходимо быстро отклонить в канале тангажа камеру сгорания основного двигателя (см. фиг. 2), что и осуществляется в соответствии с изобретением, при этом дополнительное отклонение камеры основного двигателя выбирается пропорциональным фактическому углу отклонения АР с отказавшим ЭГС (коэффициент пропорциональности отрицательный). Наконец, для парирования возмущающего момента по рысканию, который может возникнуть из-за неодновременного перехода АР в симметричное относительно плоскости I-III положение, в соответствии с изобретением используются пары газовых сопел 4, 6 и 5, 7. Необходимость использования газовых сопел в канале рыскания может быть вызвана ограничением на величину полного утла отклонения камеры сгорания основного двигателя, которое обычно имеет вид:
 ,
,
где δϑ - угол отклонения камеры по тангажу;
δψ - угол отклонения камеры по рысканию;
δmax - максимально-допустимое значение полного утла отклонения камеры.
Это обусловленное конструкцией основного двигателя так называемое ограничение на отклонение «по кругу», означающее, что ось камеры должна оставаться внутри конуса, ось которого совпадает с продольной осью РКН, а угол полураствора конуса равен δmax. В случае, когда канал тангажа «загружен» парированием возмущающего момента от пары симметрично расположенных АР (т.е. δϑ близко к δmax), на управление в канале рыскания может «не хватить» располагаемого угла отклонения камеры. Дополнительное использование газовых сопел в канале рыскания увеличивает возможности системы управления.
Для рассматриваемой в качестве примера РКН результаты математического моделирования движения при отказе ЭГС АР, установленного в IV полуплоскости, на 80 с полета представлены на фиг. 3б. Из фиг. 3б видно, что и после отказа продолжается управляемый полет РКН. Таким образом, благодаря реализации предложенного в изобретении технического решения, решается задача продолжения управляемого полета РКН при отказе ЭГС одного аэродинамических рулей.
Источники информации
1. Новости космонавтики, №10 (321), 2009 г.
Способ управления угловым движением ракеты космического назначения, заключающийся в управлении углами тангажа и рыскания путем отклонения в двух взаимно-перпендикулярных плоскостях установленной в карданном подвесе камеры сгорания основного двигателя, в управлении углом крена с помощью двух пар газовых сопел и двух аэродинамических рулей, отклоняемых с помощью своих электрогидравлических сервоприводов, отличающийся тем, что на участке управления углом крена с использованием аэродинамических рулей периодически измеряют фактические углы их отклонения от нейтрального положения, определяют рассогласования между командным сигналом на отклонение аэродинамических рулей и фактическими углами их отклонения, при превышении по абсолютной величине любым из двух рассогласований заранее выбранного предельно-допустимого значения формируют признак отказа электрогидравлического сервопривода того аэродинамического руля, чье рассогласование превысило по абсолютной величине предельно-допустимое значение, и в случае формирования признака отказа электрогидравлического сервопривода дополнительно отклоняют камеру сгорания основного двигателя по тангажу и аэродинамический руль с исправным ЭГС, на углы, пропорциональные фактическому углу отклонения аэродинамического руля с отказавшим электрогидравлическим сервоприводом, и дополнительно управляют углом рыскания с помощью пар газовых сопел, создающих управляющий момент рыскания.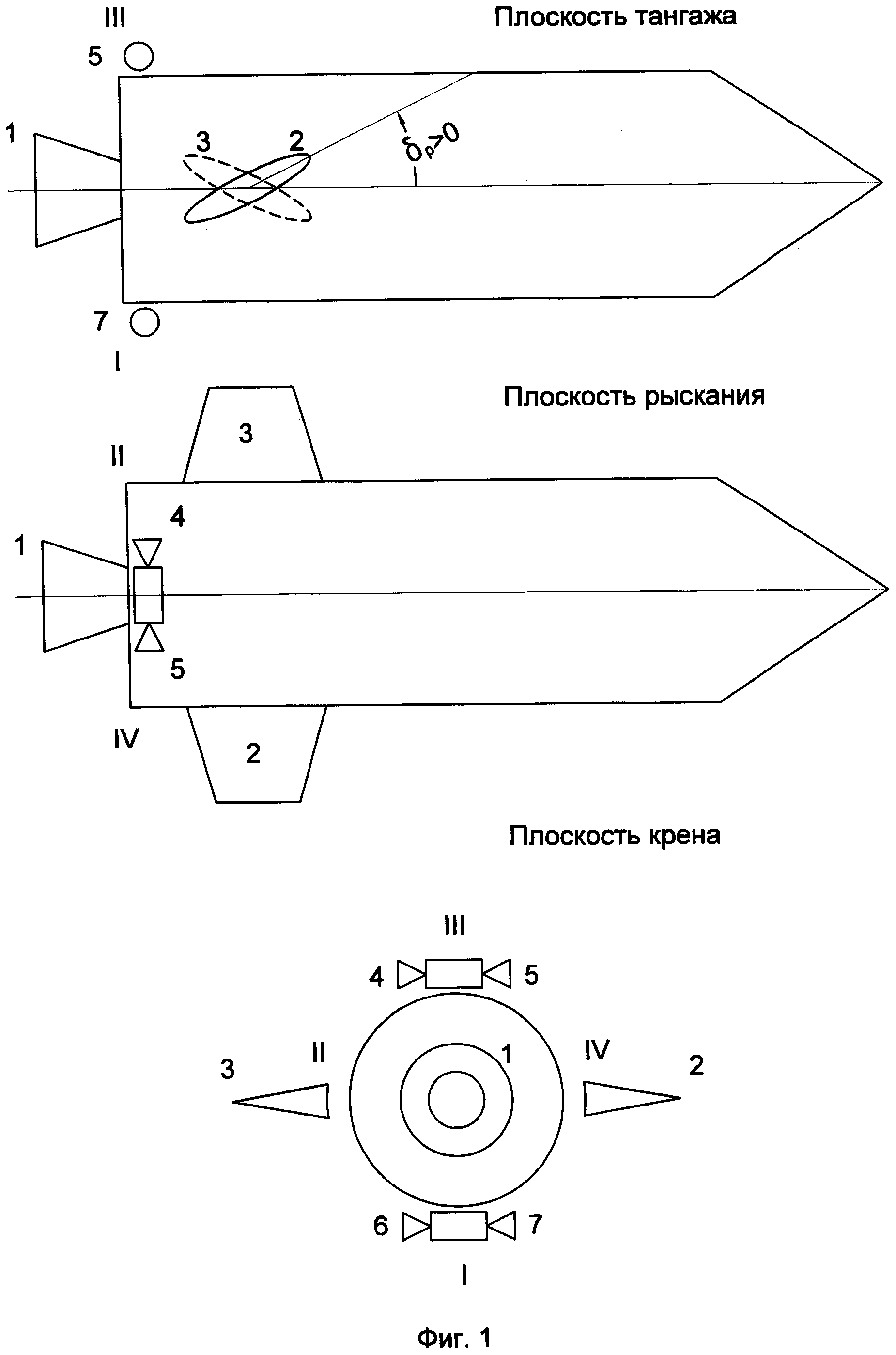
Способ защиты группового объекта от воздействия средств поражения заградительным дисперсным образованием
Способ определения направления на источник оптического излучения по рассеянной в атмосфере составляющей
Способ и устройство противоторпедной защиты надводного корабля
Способ повышения подвижности военной гусеничной машины при преодолении водной преграды
Колейное пролетное строение со складными щитами перекрытия межколейного промежутка
Система обнаружения светящихся объектов
Способ прогнозирования остаточного ресурса подшипников качения по данным об их виброактивности
Способ сборки ракетного двигателя твердого топлива (рдтт) с газогенератором и сопловым блоком
Способ переработки мицелиальных отходов производства гентамицина сульфата
Гибкий защитный слой для подвижных и деформирующихся элементов конструкций
Способ защиты стартовых сооружений от газодинамического воздействия струй двигателей ракеты
Следящая система автоматического управления нестационарным динамическим объектом
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ автономной навигации для объекта космического назначения

