Результат интеллектуальной деятельности: СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ПОСЛЕ ИНСУЛЬТА ИЛИ ТРАВМЫ С ИСПОЛЬЗОВАНИЕМ РОБОТИЗИРОВАННОГО КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО ЭКЗОСКЕЛЕТ КОНЕЧНОСТИ ЧЕЛОВЕКА, УПРАВЛЯЕМЫЙ ЧЕРЕЗ ИНТЕРФЕЙС МОЗГ-КОМПЬЮТЕР ПОСРЕДСТВОМ ВООБРАЖЕНИЯ ДВИЖЕНИЙ
Вид РИД
Изобретение
Область изобретения
[01] Изобретение относится к области медицины, в частности к неврологии, и может быть использовано для восстановления двигательных функций у постинсультных и посттравматических больных, имеющих грубые двигательные нарушения.
Предшествующий уровень техники
[02] По данным Всемирной организации здравоохранения сосудистые заболевания мозга занимают первое место в структуре инвалидизации населения. При этом реабилитационные процедуры только примерно у 70% больных дают восстановление двигательных функций, достаточное для самостоятельного обеспечения их повседневных жизненных потребностей, остальные больные требуют постоянного ухода. Поэтому актуальным является создание более совершенных методов восстановления движений, которые бы способствовали улучшению качества жизни таких больных.
[03] Наиболее распространенные патологии двигательной системы характеризуются потерей возможности совершать целенаправленные моторные акты в результате нарушения у пациента связи между центральными отделами нервной системы и периферической мускулатурой. При этом функции, лежащие в основе программирования движений в коре головного мозга, могут оставаться сохранными.
[04] Все современные методы двигательной реабилитации направлены на интенсификацию активных целенаправленных движений паретичных конечностей. Фундаментальной предпосылкой этих методов является обнаружение пластических изменений функциональной топографии моторных областей коры в результате тренировки (Nudo R.J., Milliken G.W., Jenkins W.M., Merzenich M.M. Use-dependent alterations of movement representations in primary motor cortex of adult squirrel monkeys. Journal of Neuroscience. 1996. V. 16. P. 785). Однако эти методы требуют сохранения у больного остаточных двигательных функций.
[05] Как здесь используется термин «паретичная конечность» означает конечность, движения в которой ограничены или отсутствуют.
[06] В случае, когда у больного отсутствуют остаточные двигательные функции в партичной конечности, единственным методом стимулирования пластических механизмов мозга, направленных на восстановление двигательных функций, является воображение движений. Известно, что при кинестетическом воображении движений активируются практически те же области мозга, что и при совершении движений (Gerardin Е., Sirigu A., Leherici S. et al. Partially overlapping neural networks for real and imagined hand movements. Cerebral Cortex. 2000. V. 10. P. 1093). Идея совместить активацию моторных областей мозга с помощью воображения движений с контролем степени этой активации по биологической обратной связи лежит в основе использования для реабилитации постинсультных и посттравматических больных интерфейсов мозг-компьютер (ИМК), основанных на распознавании паттернов ЭЭГ при воображении движений (Черникова Л.А., Мокиенко О.А., Рощин В.Ю., Бобров П.Д., Фролов А.А. Способ реабилитации больных, перенесших инсульт. Патент RU 2523349). Способ описанный в патенте RU 2523349 является прототипом способа настоящего изобретения. Способ включает тренировку паретичной конечности, которую проводят, предъявляя больному задание по воображению ее движения, с последующим контролем, основанным на анализе паттернов электроэнцефалограммы (ЭЭГ), возникающих при выполнении указанного задания. Регистрацию ЭЭГ осуществляют системой активных электродов, размешенных на поверхности головы. Данные ЭЭГ передаются в компьютер в реальном времени для их синхронной обработки и выделения сигналов, ответственных за воображение движения, с помощью классификатора паттернов ЭЭГ по методу Байеса. Результаты распознавания выполняемого ментального задания предъявляют больному по зрительной обратной связи с подтверждением правильности выполнения задания на экране монитора.
[07] Это позволяет включать в процедуру двигательной реабилитации биологическую обратную связь, основанную на анализе активности мозга при воображении движений и тем самым направленно контролировать активацию моторных областей, ответственных за целенаправленные движения, у больных со значительными двигательными нарушениями. Однако при этом используется биологическая обратная связь только одной, а именно зрительной модальности.
[08] Увеличение эффективности реабилитационных процедур за счет вовлечения дополнительных стимулов для интенсификации пластических механизмов мозга, направленных на восстановление двигательных функций, остается актуальной задачей. Настоящее изобретение направлено на решение этой проблемы.
[09] Краткое описание изобретения
[10] Настоящее изобретение относится к способу двигательной реабилитации постинсультных и посттравматических больных, обладающему большей эффективностью за счет дополнительной интенсификации моторных областей коры сигналами соматосенсорной системы, возникающими при пассивном выполнении воображаемого движения экзоскелетом конечности, управляемым ИМК. Способ настоящего изобретения применим в случаях, когда у пациентов имеются грубые двигательные нарушения, вплоть до полного отсутствия двигательной функции в конечности.
[11] Реабилитационная процедура настоящего изобретения включает проведение тренировок паретичной конечности, каждая из которых включает:
(а) предъявление пациенту задания по кинетическому воображению движения конечности,
(б) анализ паттернов мозговой активности пациента, возникающих при воображении движения,
(в) информирование пациента о результате распознавания выполняемого ментального задания по биологической обратной связи, в том числе с помощью визуального подтверждения на экране монитора и одновременного срабатывания экзоскелета, совершающего заданное воображаемое движение паретической конечностью.
[12] Задание по воображению движения предъявляют в течение 3-10 секунд, курс тренировки паретичной конечности составляет 10-12 дней, по одной тренировке в день длительностью 30-90 минут, с интервалами между тренировками от 1 до 4 дней.
[13] Технический результат, заключающийся в увеличение эффективности реабилитационной процедуры, достигается за счет вовлечения дополнительных стимулов для интенсификации пластических механизмов мозга, направленных на восстановление двигательных функций и повышение комфорта для пациентов во время прохождения тренировки.
[14] Пациент по биологической обратной связи получает визуальную, тактильную и проприоцептивную информацию об активности своего головного мозга при выполнении заданий на воображение различных движений. Центральная моторная команда на воображение движения подкрепляется сигналами соматосенсорной системы о ее исполнении с помощью экзоскелета.
[15] Подкрепление центральной моторной команды на воображение движения сигналом о ее исполнении с помощью экзоскелета создает наилучшие условия для запуска пластических механизмов мозга, направленных на восстановление двигательных функций.
[16] Комфорт для пациентов достигается за счет предъявления заданий на воображение движений в случайном порядке, что снижает усталость во время тренировки, а также использования экзоскелета с параметрами управления движениями по петле обратной связи, находящимися в диапазоне изменения этих параметров у человека.
[17] Для осуществления способа настоящего изобретения используется роботизированный комплекс, включающий экзоскелет, управляемый интерфейсом мозг - компьютер (ИМК). ИМК принимает сигналы от устройства, регистрирующего активность головного мозга, осуществляет классификацию паттернов активности, соответствующих воображению различных движений, и передает команды для реализации биологической обратной связи.
Краткое описание фигур
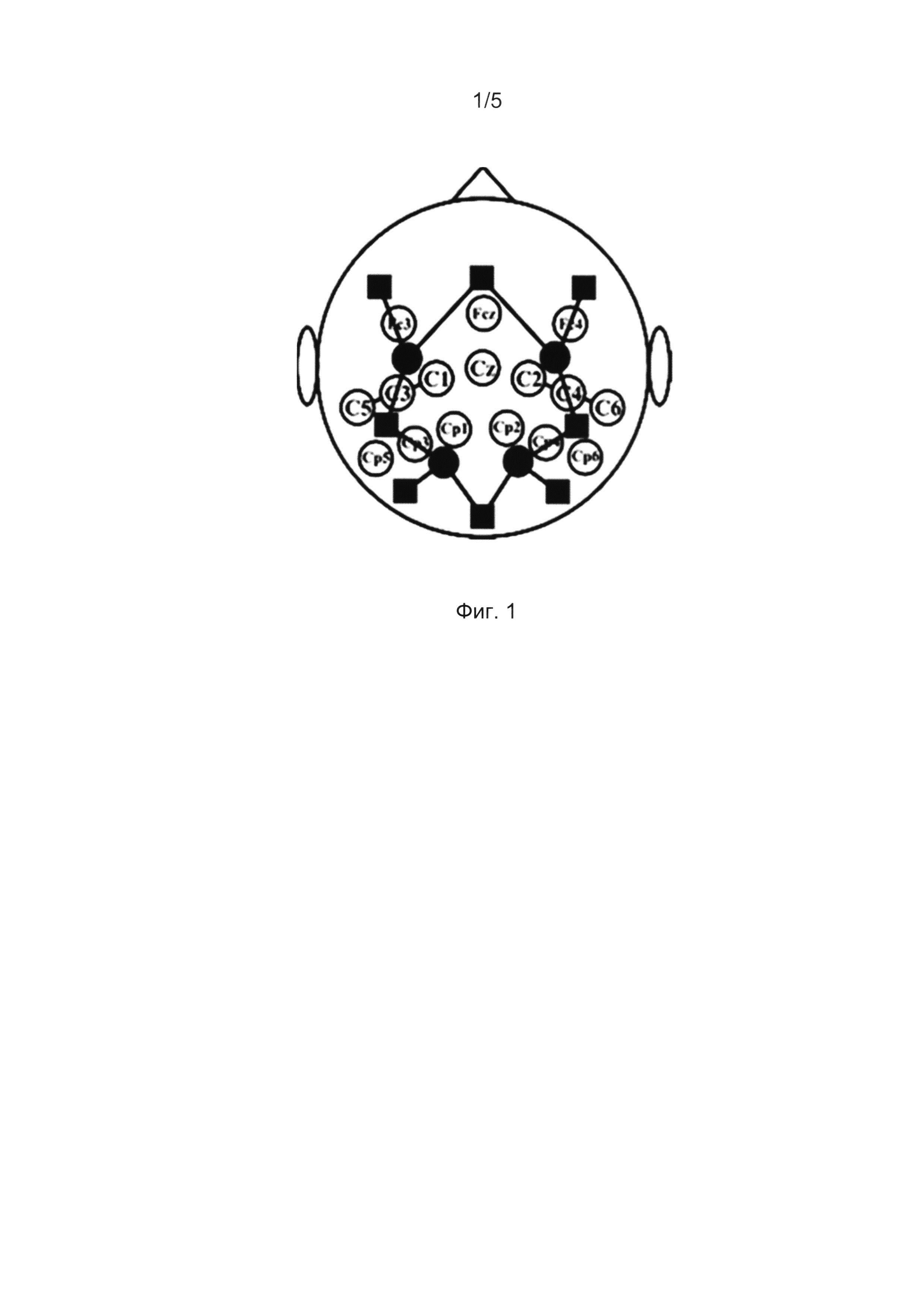
[18] Фиг. 1 показывает возможную схему расположения электродов для регистрации ЭЭГ (белые кружки), оптодов (черные кружки) и каналов (излучателей) БИКС (черные квадраты) на голове пациента при одновременной регистрации электрической и гемодинамической активностей мозга.
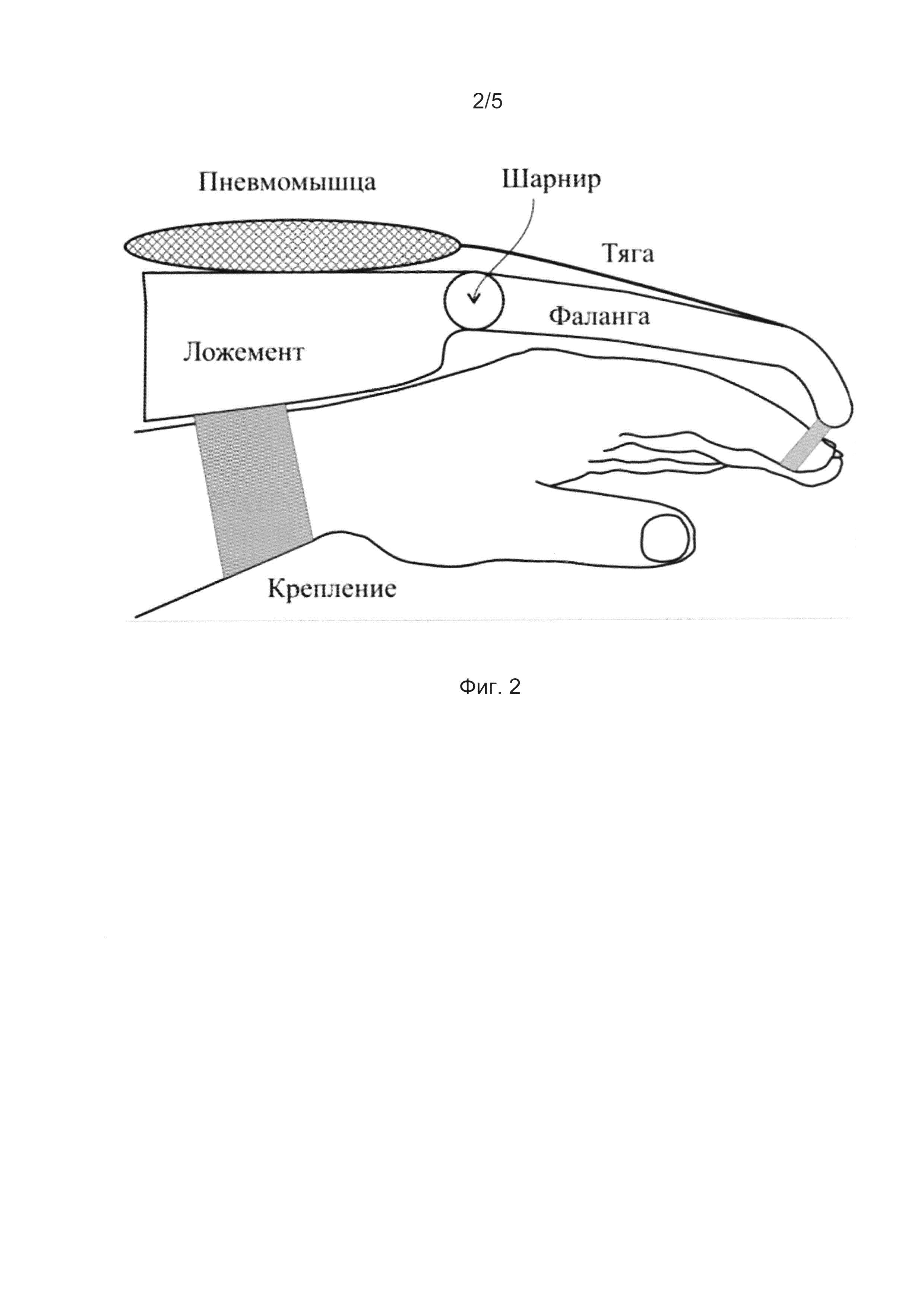
[19] Фиг. 2 показывает пример экзоскелета кисти руки, используемого для проведения реабилитационных процедур: 1 - пневмомышца, 2 - шарнир, 3 - тяга, 4 - ложемент, 5 - крепление, 6 - фаланга.
[20] Фиг. 3 показывает пример экзоскелета руки, имеющего 7 степеней свободы, соответствующих степеням свободы в руке человека: 5 - крепления, 7 - мотор пронации-супинации предплечья, 8 - мотор сгибания-разгибания лучезапястного сустава, 9 - мотор приведения-отведения лучезапястного сустава, 10 - рукоять, 11 - крепление к стойке, 12 - мотор приведения-отведения плеча, 13 - мотор сгибания-разгибания плеча, 14 - мотор вращения плеча, 15 - мотор сгибания-разгибания локтя.
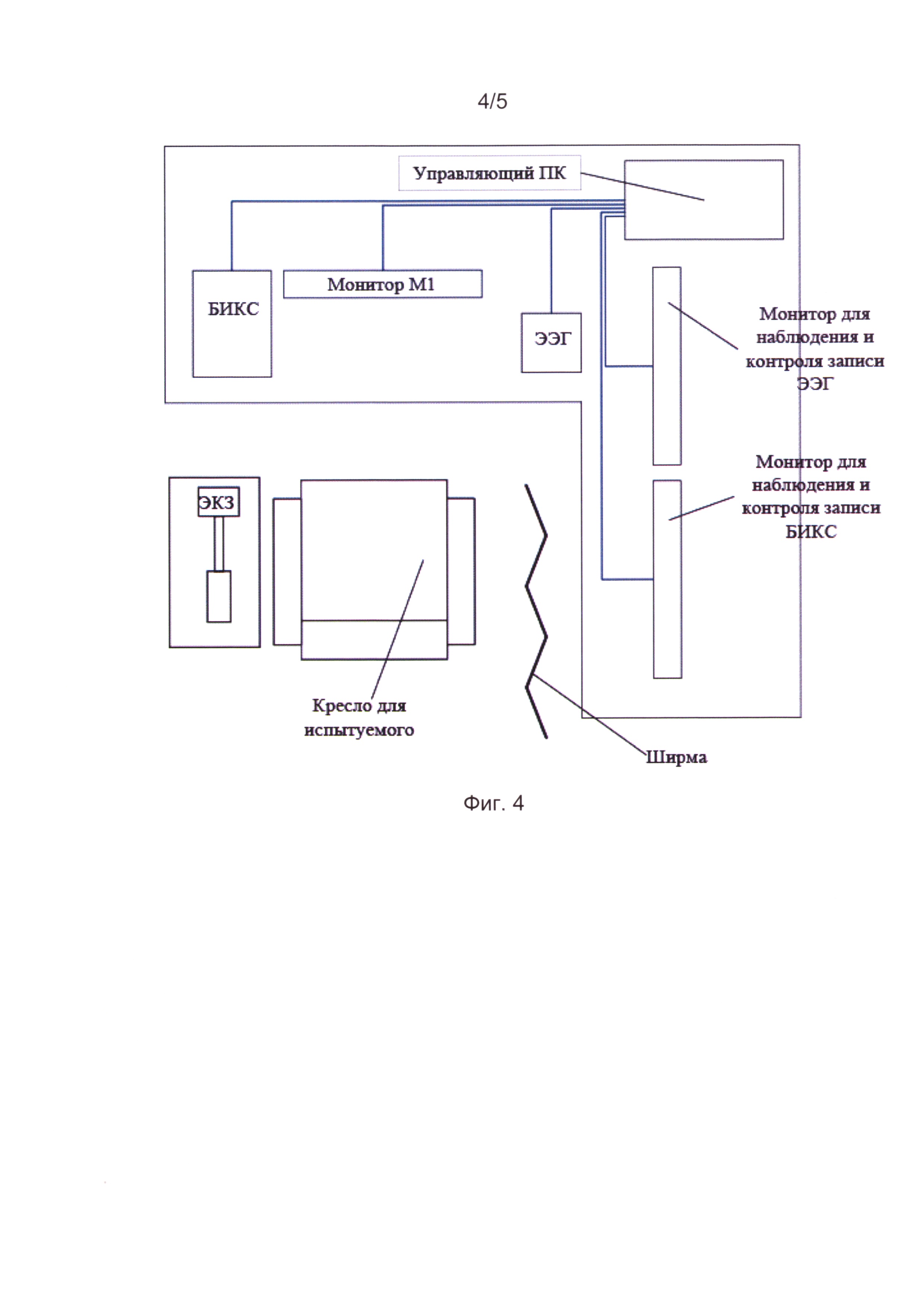
[21] Фиг. 4 иллюстрирует вариант расположения элементов роботизированного комплекса: 16 - управляющий компьютер, 17 - устройство для регистрации электрической активности мозга (электроэнцефалограф), 18 - монитор М1, 19 - экзоскелет на подкатном столике, подвесе или станине, 20-1 и 20-2 - мониторы М2 и М3, 21 - ширма, 22 - кресло для испытуемого, 23 - устройство для регистрации гемодинамической активности мозга.
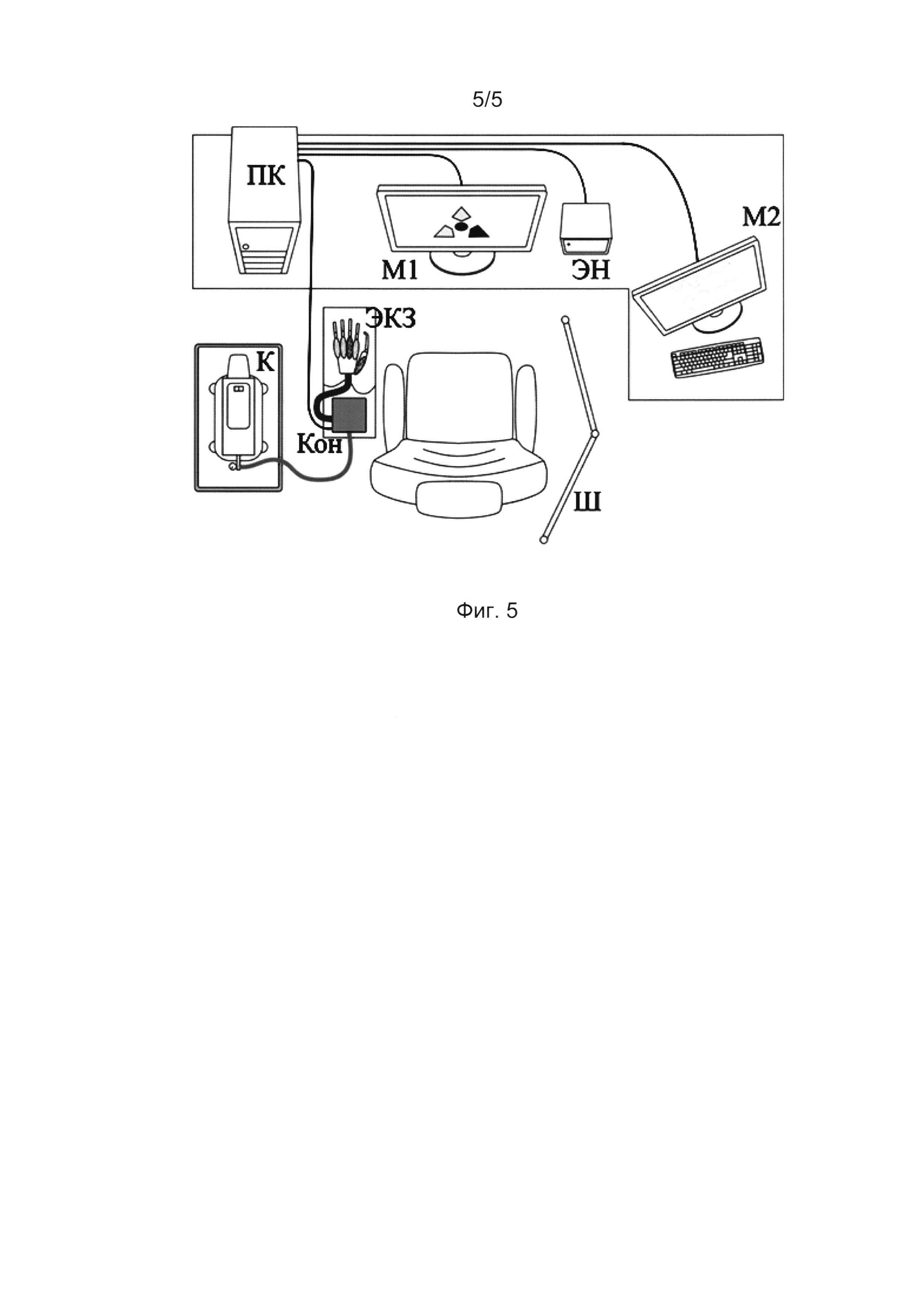
[22] Фиг. 5 иллюстрирует вариант расположения элементов роботизированного комплекса с использованием экзоскелета кисти руки, показанного на Фиг. 2: 16 - управляющий персональный компьютер, 17 - электроэнцефалограф, 18 - монитор М1, 19 - экзоскелет, 20 - монитор М2, 21 - ширма, 22 - кресло для испытуемого, 24 - компрессор, 25 - контроллер.
[23] Подробное описание изобретения
[24] Настоящее изобретение относится к способу двигательной реабилитации постинсультных и посттравматических больных. Способ настоящего изобретения особенно востребован в случаях, когда у пациентов имеются грубые двигательные нарушения в верхней конечности, вплоть до полного отсутствия двигательной функции.
[25] Реабилитационная процедура настоящего изобретения включает проведение тренировок паретичной конечности, каждая из которых включает
[26] (а) предъявление пациенту задания по кинестетическому воображению движения конечности,
[27] (б) анализ паттернов мозговой активности пациента, возникающих при воображении движения,
[28] (в) информирование пациента о результате распознавания выполняемого ментального задания по биологической обратной связи, в том числе с помощью визуального подтверждения на экране монитора и одновременного срабатывания экзоскелета, совершающего заданное воображаемое движение паретической конечностью.
[29] Задание по воображению движения предъявляют в течение 3-10 секунд, курс тренировки паретичной конечности составляет 6-12 дней, по одной тренировке в день длительностью от 20 до 90 минут с интервалами между тренировками от 1 до 4 дней. Задания на воображение движений предъявляются в случайном порядке.
[30] Как здесь используется, термин «кинестетическое воображение движения» означает, что пациент мысленно воображает заданное движение, имитируя тактильные и проприоцептивные сигналы от мышц, кожи и суставов, дающие мозгу информацию о взаимном расположении частей тела и их движении, обеспечивающие то же ощущение собственного тела, которое возникает при реальном совершении воображаемого движения, что приводит к активации мозговой активности в моторных областях коры головного мозга.
[31] Как здесь используется, термин «ментальное задание» означает задание на кинестетическое воображение определенного движения.
[32] Как здесь используется, термин «биологическая обратная связь» означает способ передачи пациенту информации об активности мозга, возникающей в результате воображения движения. Для нужд настоящего изобретения используется зрительная (визуальная), тактильная и проприоцептивная биологическая обратная связь. Зрительная биологическая обратная связь реализуется с помощью сигнала от ИМК на увеличение яркости фиксирующей взгляд метки в центре экрана монитора, перед которым сидит пациент. Увеличение яркости метки информирует пациента о правильности распознавания выполняемого ментального задания по зрительной обратной связи.
[33] Тактильная и проприоцептивная биологическая обратная связь реализуется с помощью сигнала от ИМК на совершение заданного движения экзоскелетом, надетым на пораженную конечность пациента. При срабатывании экзоскелета пациент ощущает воздействие экзоскелета на кожный покров (тактильная биологическая обратная связь) и изменение положения конечности (проприоцептивная биологическая обратная связь). Срабатывание экзоскелета на совершение заданного движения, как и зрительная обратная связь информирует пациента о правильности распознавания выполняемого ментального задания.
[34] Подкрепление центральной моторной команды на воображение движения сигналом о ее исполнении с помощью экзоскелета создает наилучшие условия для запуска пластических механизмов мозга, направленных на восстановление двигательных функций.
[35] Для осуществления способа настоящего изобретения используется роботизированный комплекс, включающий экзоскелет, управляемый интерфейсом мозг - компьютер (ИМК). ИМК принимает сигналы от устройства, регистрирующего активность головного мозга, осуществляет классификацию паттернов активности головного мозга, соответствующих воображению различных движений, и передает команды для реализации биологической обратной связи.
[36] Как здесь используется, термин «интерфейс мозг-компьютер» или «ИМК» означает устройство прямого сопряжения мозга человека или животного с внешними техническими устройствами, позволяющее управлять ими непосредственно сигналами мозга без использования активности мышц или периферических нервов.
[37] В преимущественных воплощениях в качестве регистрируемой активности головного мозга используется электрическая активность, регистрируемая с помощью электроэнцефалографа. Регистрацию электроэнцефалограммы (ЭЭГ) проводят с помощью электродов, расположенных на поверхности головы пациента. Под каждый электрод наносят специальный гель для улучшения контакта с поверхностью головы пациента.
[38] Для нужд настоящего изобретения подходит широкий класс коммерчески доступных электроэнцефалографов, способных обеспечивать передачу данных в компьютер в реальном времени. Особенностью этих электроэнцефалографов, является наличие буфера памяти, что позволяет исключить потерю данных при наличии задержек при опросе прибора компьютером. Например, для нужд настоящего изобретения могут быть использованы электроэнцефалографы, предлагаемые фирмами BrainProducts (система BrainAmp, Brain Products GmbH, Мюнхен, Германия) и g.Tec (система gUSBamp, Guger Technologies, Грац, Австрия) для ИМК исследований. Эти системы быстро передают данные в компьютер по USB, имеют средства, обеспечивающие программный доступ к данным и программную настройку прибора (Application Interfaces, API). Отечественными системами такого класса являются приборы NBL640 (НейроБиоЛаб, Россия) и электроэнцефалографы Нейровизор БММ36 и Нейровизор БММ52 (МКС, Россия).
[39] Размещение и количество электродов, используемых для регистрации ЭЭГ может быть различным, например, может быть использовано 48 электродов, расположенных по системе 10-20 (Зенков Л.Р. Клиническая электроэнцефалография (с элементами эпилептологии). Руководство для врачей. 3-е изд., М: МЕДпрессинформ, 2004, 368 с.).
[40] В этом случае ЭЭГ электроды обычно установлены на позициях С3, Cz, С4, Ср3, Cpz, Ср4, специфицируемые международной системой 10-20. Дополнительные электроды также могут быть установлены на позициях Fc3, Fez, Fc4, С5, С1, С2, С6, Ср5, Ср1, Ср, Ср6, специфицированных международной системой 10-20.
[41] В некоторых воплощениях настоящего изобретения могут использоваться другие системы расположения и другое количество электродов, например, система расположения 16 электродов в электроэнцефалографическом шлеме EPOC фирмы Emotiv (Австралия), имеющем беспроводную связь с компьютером. По сравнению с системой 10-20, лучшее качество распознавания паттернов электрической активности мозга при воображении движений достигается при увеличении плотности электродов над центральными сенсомоторными областями мозга.
[42] В некоторых воплощениях в качестве регистрируемой активности головного мозга используется гемодинамическая активность, регистрируемая с помощью спектрометра ближнего инфракрасного диапазона. Такие спектрометры, как правило, имеют клиническую сертификацию, что означает подтвержденное отсутствие негативного влияния излучения на пациента.
[43] Регистрация гемодинамической активности с помощью ближней инфракрасной спектроскопии (БИКС) основана на измерении локальных концентраций оксигемоглобина и дезоксигемоглобина, изменяющихся в случае вызванной или произвольной активности нейронов в рассматриваемой области. Эти концентрации измеряются по степени поглощения теплового излучения с длиной волны 690 и 830 нм (соответственно для дезокси- и оксигемоглобина). Регистрацию гемодинамической активности проводят с помощью излучателей и приемников, расположенных на поверхности головы. Для регистрации гемодинамической активности мозга, которая соответствует совершению или воображению движений, спектрометр ближнего инфракрасного диапазона должен обладать следующими минимальными характеристиками:
[44] а) Излучение источников в ближнем инфракрасном диапазоне с длинами волн от 700 до 900 нм.
[45] б) Мощность излучателя не более 2 мВт.
[46] в) Частота выдачи данных не менее 4 Гц.
[47] г) Наличие как минимум четырех каналов.
[48] д) Возможность регистрации по каждому каналу изменения концентрации оксигенированного гемоглобина относительно базового значения, устанавливаемого в начале записи или по выбранному отрезку (ΔO2Hb, μмоль/л), а также изменения концентрации дезоксигенированного гемоглобина относительно базового значения, устанавливаемого в начале записи или по выбранному отрезку (ΔHb, μмоль/л)
[49] е) Возможность изменять расстояние между излучателем и приемниками каждого канала спектрометра в пределах от 1 до 4 см.
[50] ж) Возможность установки каналов спектрометра на произвольную позицию на поверхности головы или наличие шапки для установки каналов с достаточно частой сеткой доступных позиций установки.
[51] и) возможность синхронизации с компьютером, используемым для предъявления инструкций средствами API или при помощи средств автоматической подачи синхроимпульсов.
[52] Желательно использование спектрометра с более высокой частотой выдачи данных, возможностью синхронизации с программой предъявления инструкций и большим числом каналов. Также желательна возможность регистрации нормализованного индекса гемоглобина тканей (nTHI, Normalized tissue hemoglobin index, безразмерная величина).
[53] Источники и приемники БИКС следует расположить так, чтобы по крайней мере один из каналов располагался над моторной областью интереса в правом полушарии, а другой в - левом.
[54] Например, для нужд настоящего изобретения подходят спектрометры ближнего инфракрасного диапазона NIRScout фирмы NIRx Medical Technologies, LLC, Германия, или NIRO-200NX фирмы Hamamatsu, Япония.
[55] В некоторых воплощениях одновременно регистрируют электрическую и гемодинамическую активности мозга. Если ИМК, основано на классификации паттернов комбинированных сигналов ЭЭГ и БИКС, то возможность получения данных от прибора БИКС в реальном времени во время эксперимента является обязательной. Пример расположения электродов и оптодов для одновременной регистрации двух этих активностей показана на Фиг. 1, однако расположение регистрирующих элементов на голове пациента может быть изменено в зависимости от характера повреждения головного мозга, данных функциональной МРТ, геометрии головы пациента и количества используемых регистрирующих элементов.
[56] Расположение БИКС излучателя и приемника на расстоянии 30 мм на поверхности скальпа, с одной стороны, позволяет обеспечить глубину зондирования, достаточную для детектирования активности корковых структур головного мозга, а с другой стороны оставляет достаточно пространства для размещения ЭЭГ электродов в непосредственной близости от оптодов для проведения совместных измерений. ЭЭГ электроды и оптоды БИКС не взаимодействуют между собой по физическим причинам, и поэтому не может возникнуть ситуация взаимовлияния датчиков.
[57] Данные регистрации активности головного мозга пациента передаются на управляющий компьютер, содержащий программное обеспечение для синхронной передачи данных, выделения рабочих показателей ЭЭГ, классификации сигналов для распознавания паттернов активности ЭЭГ, соответствующих выполнению ментальных заданий, в реальном времени, и генерации команд, передающихся на монитор пациента и экзоскелет в зависимости от распознанного ментального состояния (ПК).
[58] Классификация паттернов ЭЭГ и/или БИКС осуществляется с помощью классификатора, определяющего по пространственно-временному распределению регистрируемых сигналов активности мозга, какому ментальному состоянию она соответствует. Обычно для каждой реабилитационной сессии классификатор вначале настраивается на текущие индивидуальные особенности активности мозга и продолжает адаптивно перенастраиваться за все время сессии, реагируя на изменение состояния пациента.
[59] Например, для нужд настоящего изобретения может быть использован классификатор электрической активности мозга, основанный на методе Байеса, как описано П.Д. Бобровым и соавторами (Бобров П.Д., Коршаков А.В. и др. Байесовский подход к реализации интерфейса мозг - компьютер, основанного на представлении движений. Журнал Высшей Нервной Деятельности и Нейрофизиологии, 2012, 62(1): 89-100). Байесовский классификатор основан на оценке вероятности получения текущего многомерного (по числу электродов) сигнала ЭЭГ при условии, что он генерируется при выполнении данной ментальной задачи. Для оценки вероятности используется формула для распределения вероятности многомерного нормального распределения с нулевым средним, зависящая только от ковариационной матрицы многомерного сигнала. Вычисляются вероятности получения регистрируемого сигнала для всех ковариационных матриц ЭЭГ, соответствующих выполнению различных ментальных задач. В соответствии с теоремой Байеса полагается, что сигал соответствует выполнению той задачи, для которой вероятность оказалась наибольшей. Именно эта задача идентифицируется как выполняемая в данный момент времени. Таким образом, настройка классификатора сводится к вычислению ковариационных матриц сигнала ЭЭГ при выполнении различных ментальных задач.
[60] Примером другого классификатора, часто используемого в ИМК, является классификатор, основанный на методе CSP (Common Spatial Pattern) для распознавания двух ментальных состояний или MCSP (Multiclass CSP) для распознавания их большего числа. Метод CSP позволяет рассчитать такое направление в многомерном пространстве сигнала, проекция на которое для сигнала, соответствующего одному состоянию мала, а для другого велика. Тогда, проецируя текущий сигнал на это направление, можно по величине проекции судить, какому состоянию он соответствует. Для реализации методов CSP и MCSP, как и метода Байеса, требуется только вычисление ковариационных матриц сигналов ЭЭГ при выполнении различных ментальных заданий. Могут быть использованы и другие классификаторы известные специалистам в данной области.
[61] Во время тренировки пациент должен сидеть в удобном кресле перед монитором (монитор пациента, М1), находящимся на расстоянии около 1 м от него, например, на расстоянии 0,9-1,2 м от монитора. Монитор подключен к управляющему компьютеру. На мониторе во время эксперимента должны предъявляться зрительные инструкции, подсказывающие испытуемому, какую задачу он должен совершать. На этом же мониторе пациенту предъявляют сигнал зрительной обратной связи (информацию о правильности выполнения задания). Перед началом тренировки пациент получает инструкцию, как трактовать визуальные команды, предъявляемые на мониторе. Пример предъявления инструкций описан в экспериментальной части, ниже.
[62] Пациент во время тренинга выполняет одно из трех заданий: расслабиться, представить заданное движение левой или правой руки. По заданию расслабиться (покой) пациент должен спокойно сидеть и смотреть в центр экрана. Задания предъявляют в случайном порядке, каждое в течение времени в интервале 3-10 секунд, обычно 5-10 сек, например, 8, 9 или 10 сек.
[63] Сигнал от ИМК о правильно выполненном ментальном задании передается на монитор, информируя пациента о правильности распознавания выполняемого ментального задания по зрительной обратной связи.
[64] Во время каждой тренировки на паретичной конечности пациента закреплен экзоскелет. Для нужд настоящего изобретения термин «экзоскелет» означает надеваемую на пациента конструкцию, способную осуществлять заданное движение. В частности, это может быть роботизированный ортез или манипулятор.
[65] Для нужд настоящего изобретения паретичная конечность - это рука. В преимущественных воплощениях настоящего изобретения экзоскелет способен осуществлять разжимание кисти пациента. В некоторых воплощениях экзоскелет способен осуществлять по крайней мере одно из следующих движений: разжимание и/или сжимание кисти пациента, сгибание и/или разгибание в плечевом суставе, приведение и/или отведение в плечевом суставе, вращение в плечевом суставе, сгибание и/или разгибание в локтевом суставе, пронацию и/или супинацию в локтевом суставе, сгибание и/или разгибание в лучезапястном суставе, приведение и/или отведение в лучезапястном суставе. В некоторых воплощениях экзоскелет способен выполнять несколько из вышеуказанных действий, имитируя целенаправленные движения человека (движение к цели).
[66] Экзоскелет крепится на руке пациента и располагается на подкатном столике, подвесе или поддерживающей станине, обеспечивающих разгрузку руки пациента.
[67] Принципиальная конструкция экзоскелетов, способных совершать движения руки человека известна из уровня техники и реализована, например, в экзоскелетах ARM_Guide (Assistant Rehabilitation and Measurement Guide, Reinkensmeyer et al., J. Rehabil. Res. Develop. 2000. V. 37. №6. P. 653-662, Mirror Image Movement Enabler (Lum et al., Arch. Physical Med. Rehabil. 2002. V. 83. №7. P. 952-959; BI Manu Track (Hingtgen et al., J. Biomechanics. 2006. V. 39. №4. P. 681-688; NeRobot (Neuro Rehabilitation Robot, Masieroetal, Arch. Physical Med. Rehabil. 2007. V. 88. №2. P. 142-149.)? T_WREX (Therapy Wilmington Robotic Exosceleton, Iwamuro et al., Arch. Physical Med. Rehabil. 2008. V. 89. P. 2121-2128) и других, как, например, показано на Фиг. 2 и 3.
[68] В преимущественных воплощениях для нужд настоящего изобретения параметры управления движениями экзоскелета по петле обратной связи находятся в диапазоне изменения этих параметров у человека и составляют для коэффициента жесткости (коэффициента при члене, обеспечивающем коррекцию управляющего силового момента, пропорциональную разнице между требуемым и текущим значениями суставных углов) 3-5 Нм/рад в лучезапястном суставе, 8-12 Нм/рад в локтевом суставе и 20-25 Нм. рад в плечевом суставе, а для коэффициента вязкости (коэффициента при члене, обеспечивающем коррекцию, пропорциональную скорости изменения разницы между требуемым и текущим значениями суставных углов) 0.8-1 Нмс/рад в лучезапястном суставе, 1.3-1.5 Нмс/рад в локтевом суставе и 3-4 Нмс/рад в плечевом суставе (Frolov А.А., Prokopenko R.A., Dufosse М., Ouezdou F.B. Adjustment of the human arm viscoelastic properties to the direction of reaching. Biological cybernetics, 2006, 94(2), 97-109.). При таких значениях параметров управления по обратной связи обеспечивается наиболее комфортное взаимодействие экзоскелета с рукой человека.
[69] Как здесь используется термин «параметры управления движениями экзоскелета по петле обратной связи» означает коэффициенты ПИД (Пропорциональный, Интегральный, Дифференциальный) - контроллера, управляющего движениями экзоскелета по отклонению текущих значений суставных углов от заданных. ПИД-контроллер рассчитывает корректирующие силовые моменты силовых приводов в каждом суставе в виде суммы трех слагаемых. Первое слагаемое пропорционально разности между текущим и требуемым значениями суставных углов. Коэффициент пропорциональности в этом слагаемым называется "жесткостью" ПИД-контроллера. Второе слагаемое пропорционально интегралу от этой разницы, третье - ее производной. Коэффициент пропорциональности для третьего слагаемого называется "вязкостью" ПИД-контроллера. Управление по обратной связи движениями руки человека осуществляется многими нелинейными механизмами, однако показано (Frolov А.А., Dufosse М., Rizek S., Kaladjian A. On the possibility of linear modelling the human arm neuromuscular apparatus. Biological Cybernetics, 82, 499-515), что их суммарное действие можно достаточно точно описать с помощью линейного ПД - контроллера с временной задержкой. Коэффициенты жесткости и вязкости этого контроллера, отражающие суммарное действие нелинейных механизмов нервно-мышечного аппарата руки, экспериментально определяются по силовым моментам, возникающим в ее суставах в ответ на короткие неожиданные силовые возмущения, как коэффициенты регрессионной модели, связывающей изменение силовых моментов с изменениями суставных углов и угловых скоростей по сравнению с невозмущенными движениями. Если сила измеряется в Ньютонах (Н), расстояние в метрах (м), суставной угол в радианах, а время в секундах, то силовой момент измеряется в Нм, жесткость ПД-контролера измеряется в Нм/рад, а вязкость в Нмс/рад.
[70] Экзоскелет может функционировать на основе пневмоуправления или электроуправления.
[71] В случае, пневмоуправления в состав роботизированного комплекса входит пневмоконтроллер, расположенный таким образом, что он не виден пациенту. Рабочее давление воздуха в пневмоконтроллере обеспечивается компрессором (К), который находится в ящике со звуконепроницаемым покрытием. Пневмоконтроллер устанавливает в пневмомышцах давление по сигналу от ИМК, пропорциональному вероятности правильного распознавания ментального состояния, соответствующего предъявленному заданию.
[72] Увеличение давления в пневмомышце приводит к увеличению скорости движения экзоскелета в направлении воображаемого движения. Обратное движение экзоскелета производится пассивными пружинами. Например, при задании на воображение раскрытия кисти руки, экзоскелет осуществляет это движение усилием пневмомышцы, а сжатие с помощью пружины. Таким образом, скорость и направление движения экзоскелета определяются балансом между силами, развиваемыми пневмомышцами, и противоположными силами пружин. Если вероятность правильного распознавания выполняемой ментальной задачи велика, то экзоскелет двигает руку в направлении воображаемого движения, если она мала, то в противоположном. Это обеспечивает подкрепление выполняемой инструкции по биологической обратной связи.
[73] В случае электроуправления в состав роботизированного комплекса входит источник постоянного тока, питающий двигатели, установленные на экзоскелете. Сигнал от ИМК, пропорциональный вероятности правильного распознавания выполняемого ментального задания, передается через управляющий компьютер на контроллеры двигателей и далее на их обмотки с помощью широтноимпульсной модуляции напряжения от источника питания. При этом сигнал от ИМК управляет скоростью движения экзоскелета в направлении воображаемого движения. Скорость вычисляется как разность между сигналом ИМК и некоторым постоянным числом, задающим скорость движения экзоскелета в обратном направлении при распознавании выполняемой ментальной задачи на уровне случайности. Таким образом, как и при пневмоуправлении, экзоскет двигает руку пациента в направлении воображаемого движения, если вероятность правильного распознавания выполняемой ментальной задачи велика, и в обратном, если она мала. Комфортное взаимодействие руки и экзоскелета, т.е. с параметрами в петле управления по обратной связи, соответствующими их значениям у человека, обеспечивается управлением моторами по силовому моменту. Для этого экзоскелет снабжен датчиками крутящих моментов вокруг всех осей вращения конструкции.
[74] Управление предъявлением инструкций и сбором данных осуществляется управляющим компьютером (М1). В преимущественных воплощениях компьютер снабжен вторым монитором (М2), позволяющим лицу, проводящему тренировку пациента, наблюдать за ходом тренировки. В частности, на мониторе М2 можно одновременно наблюдать за электроэнцефалограммой пациента, источниками электрической активности мозга, соответствующей кинестетическому воображению движений, ответами классификатора ИМК и ходом предъявления зрительных инструкций. В случае одновременной регистрации ЭЭГ и БИКС, управляющий компьютер имеет третий монитор (М3), при этом на одном мониторе (М2) можно отслеживать изменение электрической, а на другом (М3) гемодинамической активности мозга.
[75] Пациент не должен видеть второй и третий мониторы управляющего компьютера. Например, эти мониторы могут быть скрыты за ширмой.
[76] Пример общей схемы расположения элементов роботизированного комплекса показана на Фиг. 4.
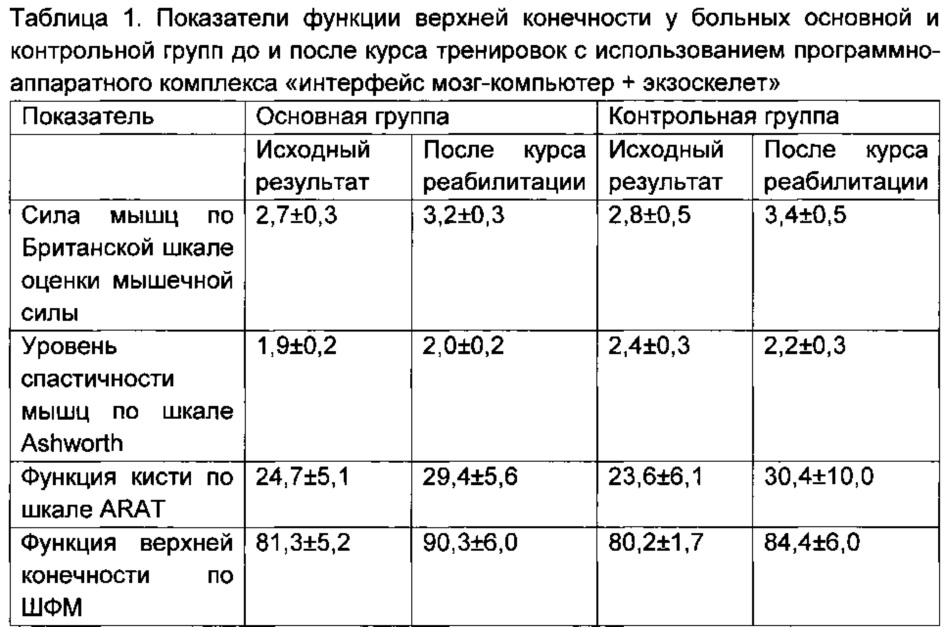
[77] Для оценки клинической эффективности восстановительной реабилитации у больных могут быть использованы шкалы Ashworth, Fugl-Meyer (ШФМ), ARAT, Британская шкала оценки мышечной силы, стандартно используемые при оценке эффективности реабилитации у постинсультных и посттравматических больных. Для оценки дееспособности и повседневной активности могут быть использованы модифицированная шкала Рэнкина (МШР) и индекс Бартел, для оценки когнитивных функций - таблицы Шульте.
[78] Следующие примеры предлагаются в качестве иллюстративных, но не ограничивающих.
Примеры
Пример 1. Сравнительный анализ эффективности реабилитации при использовании роботизированного комплекса, включающего экзоскелет, и стандартной терапии.
[79] Комплекс, использованный для проведения реабилитационных процедур, состоял из следующих элементов (ФИГ. 5): 52-канального электроэнцефалографа "Нейровизор БММ-52" (NVX 52) производства фирмы "Медицинские компьютерные системы", Россия (ЭН), персонального компьютера (операционная система Windows 7) для синхронной передачи данных, выделения рабочих показателей ЭЭГ, классификации сигналов для распознавания паттернов активности ЭЭГ, соответствующих выполнению ментальных заданий, в реальном времени, и генерации команды экзоскелету в зависимости от распознанного ментального состояния (ПК), экзоскелета кисти руки с пневмомышцами производства фирмы "Нейроботикс", Россия, управляемого по команде ИМК (ЭКЗ). Во время сеанса тренинга пациента усаживали в удобном кресле так, что голова находилась на расстоянии 1 метра от компьютерного монитора (М1), на котором ему предъявляли визуальные задания и сигнал зрительной обратной связи (информацию о правильности выполнения задания). В центре экрана монитора размещался кружок, служащий для фиксации взгляда, и расположенные вокруг него 3 ромбовидные стрелки. Пациент во время тренинга выполнял одно из трех заданий: расслабиться (когда загорается верхняя стрелка), представить раскрытие кисти левой или правой руки (когда загорается соответствующая левая или правая стрелка). По заданию расслабиться (покой) пациент должен был спокойно сидеть и смотреть в центр экрана. Экзоскелет кисти руки находился на подкатном столике, со стороны руки, двигательные функции которой нарушены (ЭКЗ, показан экзоскелет кисти левой руки). На нижней полке столика был установлен пневмоконтроллер (Кон), так что он не был виден пациенту. Рабочее давление воздуха в пневмоконтроллере обеспечивалось компрессором (К), который находился в ящике со звуконепроницаемым покрытием. Пневмоконтроллер устанавливает в пневмомышце давление по сигналу от ИМК, пропорциональному вероятности правильного распознавания ментального состояния, соответствующего предъявленному заданию. Результаты распознавания воображаемого движения предъявляли пациенту по зрительной и кинестетической обратной связи: в случае успешного распознавания классификатором задачи, соответствующей предъявляемой инструкции, фиксирующая взор метка в середине экрана приобретала зеленый цвет, а экзоскелет осуществлял пассивное разгибание пальцев кисти до упора. В случае невозможности распознавания воображаемого движения по результатам анализа ЭЭГ цвет метки не изменялся, а экзоскелет осуществлял обратное движение кисти до упора. Задания предъявлялись в случайном порядке, каждое в течение 3-10 секунд. Время предъявления задания подбиралось наиболее комфортным для пациента. Схематическое изображение экзоскелета показано на Фиг. 2.
[80] Управление экспериментом и наблюдение за его ходом осуществлялось с рабочего места, отделенного от кресла ширмой (Ш). На втором мониторе (М2) можно одновременно наблюдать за электроэнцефалограммой пациента, ответами классификатора ИМК и ходом предъявления зрительных инструкций.
[81] Регистрацию ЭЭГ проводили с помощью 48 электродов, расположенных на поверхности головы пациента, по схеме 10-20 (Зенков Л.Р. Клиническая электроэнцефалография (с элементами эпилептологии). Руководство для врачей. 3-е изд., М: МЕДпрессинформ, 2004, 368 с.). Под каждый электрод наносили специальный гель для улучшения контакта с поверхностью головы пациента. Сигналы ЭЭГ фильтровали в полосе частот от 5 до 30 Гц. В данной методике применялся классификатор паттернов ЭЭГ, основанный на методе Байеса (Бобров П.Д., Коршаков А.В. и др. Байесовский подход к реализации интерфейса мозг - компьютер, основанного на представлении движений. Журнал Высшей Нервной Деятельности и Нейрофизиологии, 2012, 62 (1): 89-100).
[82] Для оценки клинической эффективности восстановительной реабилитации у больных с центральным парезом руки был проведен сравнительный анализ восстановления двигательной функции в основной группе (10 пациентов) и группе сравнения (5 пациентов). В основную группу входили 6 мужчин и 4 женщины в возрасте в возрасте 30-66 лет (средний возраст 47±7,7 лет), перенесших перенесшие ишемический (9) и геморрагический инсульт (1) в срок от 2 месяцев до 4 лет. Дополнительно к стандартной терапии пациенты основной группы получали по 10 занятий длительностью 45-90 минут в течение 2 недель. Перерывы между занятиями не превышали четырех дней. Для оценки эффективности проводимых мероприятий использовали шкалы Ashworth, Fugl-Меуег (ШФМ), ARAT, Британскую шкалу оценки мышечной силы, для оценки дееспособности и повседневной активности - модифицированную шкалу Рэнкина (МШР) и индекс Бартел, для оценки когнитивных функций - таблицы Шульте.
[83] Все 10 пациентов находились в ясном сознании, правильно ориентированы в месте и времени. Из обследованных 4 перенесли инсульт в бассейне левой средней мозговой артерии (СМА), 6 - в правой СМА. У пациентов с очагом в левом полушарии имелись речевые нарушения в виде корковой дизартрии (1), элементов моторной афазии (3) с сохранной внутренней речью. При логопедическом тестировании были исключены наличие акустико-гностической, акустико-мнестической или семантической афазии, что могло препятствовать правильному пониманию пациентом инструкций по выполнению реабилитационной процедуры.
[84] Все пациенты имели спастический гемипарез выраженностью от 1 до 4 баллов, причиной которого был перенесенный инсульт. При нейровизуализации у всех пациентов обнаруживались обширные постинсультные дефекты вещества мозга, причем у 8 пациентов выявлялось поражение первичной сенсомоторной и премоторной зон коры полушария головного мозга, а также прилегающего белого вещества головного мозга, у 7 - подкорковое поражение различного объема, локализованное в лобно-теменно-височной области с вовлечением волокон пирамидного тракта. Пациенты контрольной группы имели сходные неврологические показатели. В дополнение к стандартной терапии с пациентами этой группы проводилась имитация реабилитационной процедуры без воображения движения и обратной связи и с примерно таким же количеством движений эзоскелета, которые в отличие от основной группы не были синхронизированы с активностью мозга.
[85] В табл. 1 представлены результаты оценки функции верхней конечности у пациентов основной и контрольной групп до и после проведения курса реабилитации. Как видим, в результате проведенного лечения как в основной, так и в контрольной группе отмечено увеличение силы, улучшение функции верхней конечности, при этом оценка по ШФМ в основной группе возросла на 11%, в контрольной - на 5,2%. Отметим, что существенного изменения уровня спастичности не было отмечено.
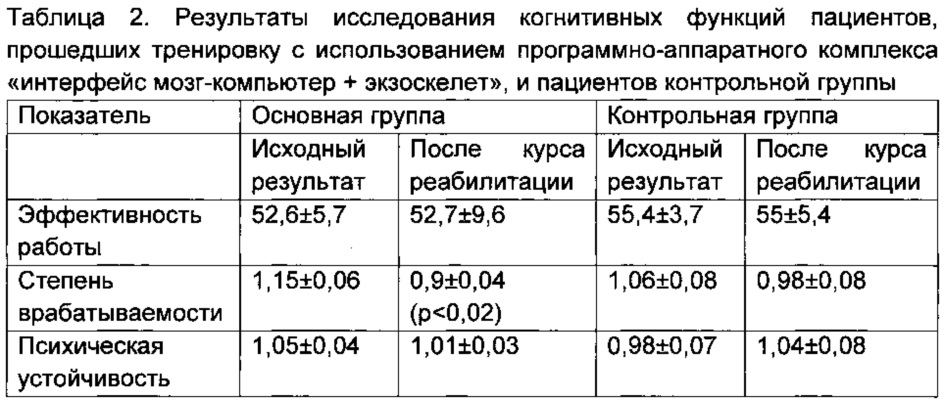
[86] Исследование когнитивных функций с помощью таблиц Шульте (табл. 2) выявило достоверное улучшение показателя степени врабатываемости, что свидетельствовало об ускорении протекания психических процессов. При этом в основной группе отмечено увеличение способности к выполнению интеллектуальных задач на 4%, в то время как в контрольной - ухудшение на 6%.
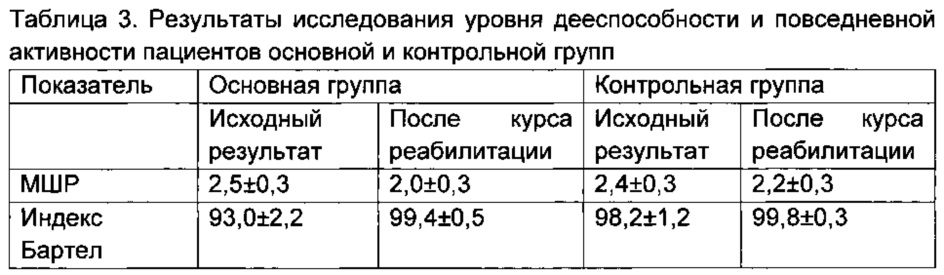
[87] Наряду с оценкой восстановления функции верхней конечности важным показателем является и определения уровня общей двигательной и повседневной активности. В последние годы МШР используется в реабилитационных исследованиях как универсальный показатель недееспособности (инвалидизации). В табл. 3 приведены данные, свидетельствующие о снижении уровня инвалидизации у пациентов основной группы на 20%, в контрольной - на 8%. Общая повседневная активность у пациентов основной группы повысилась на 7%, в то время как в контрольной - на 2%.
[88] При анализе приведенных данных можно также предположить, что использование имитации процедуры ИМК+экзоскелет в условиях возможности контакта пациентов основной и контрольной групп приводило к включению неконтролируемого экспериментаторами воображения движений, которое улучшало результаты реабилитации у лиц контрольной группы.
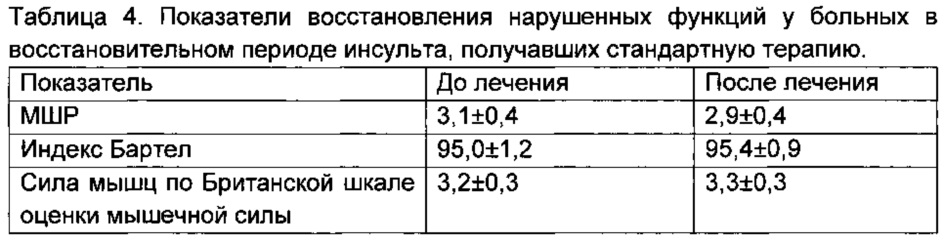
[89] В табл. 4 приведены показатели восстановления для 10 пациентов, не включенных ни в основную, ни в контрольную группы, т.е. получавших лишь стандартную терапию.
[90] Как видно из табл. 4 результат восстановительного лечения у пациентов в позднем восстановительном периоде после инсульта был низким, существенной динамики показателей не зарегистрировано. Несмотря на то что все пациенты субъективно отмечали улучшение, объективные данные свидетельствовали об отсутствии достоверных сдвигов в состоянии. Представленные данные являются показывают эффективность использования реабилитационной процедуры с использованием программно-аппаратного комплекса «интерфейс мозг-компьютер + экзоскелет» в восстановительном лечении больных после инсульта.
Пример 2. Исследование электрической и гемодинамической активности мозга при воображении движений и классификация полученных паттернов активности
[91] Принципиальная схема установки включает энцефалограф NVX-52 (ООО "Нейроботикс", Россия) и спектрограф NIRScout 84 (NIRx Medical Technologies, LLC, Германия). Центральные частоты излучения диодов спектрометра - 760 и 850 нм. NIRScout 84 имеет 8 излучателей и 4 приемника излучения, позволяя в принципе получить 4*8=32 канала регистрации гемодинамической активности. Для классификации сигналов БИКС использовали байесовский классификатор для сигнала с ненулевым средним, аналогичный тому, который использовался для классификации паттернов электроэнцефалограммы. Для классификации комбинированных паттернов электрической и гемодинамической активности мозга было решено объединить байесовский классификатор ЭЭГ и БИКС в один общий классификатор. Для этого было сделано упрощающее предположение о том, что регистрируемая электроэнцефалограмма и гемодинамическая активность представляют собой реализации двух статистически независимых случайных величин, что позволяет записать плотность их совместной вероятности как произведение плотностей для ЭЭГ и БИКС сигналов, соответствующих воображению различных движений.
[92] С помощью созданного гибридного ИМК были проведены эксперименты на 5 здоровых испытуемых по 5 сессий как описано в Примере 1, но без подключения экзоскелета. Отличие задачи состояло в том, что испытуемым предлагалось совершать или реальные, или воображаемые движения левой или правой рукой. Воображать движение следовало непрерывно, кинестетически. Для выполнения каждой задачи использовали определенную зрительную инструкцию. Задача должна была выполняться все время, когда соответствующая инструкция (подсказка) предъявлялась. Для предъявления инструкций использовали изменение цвета стрелок, расположенных вокруг центральной метки, которая служит для фиксации взгляда испытуемого.
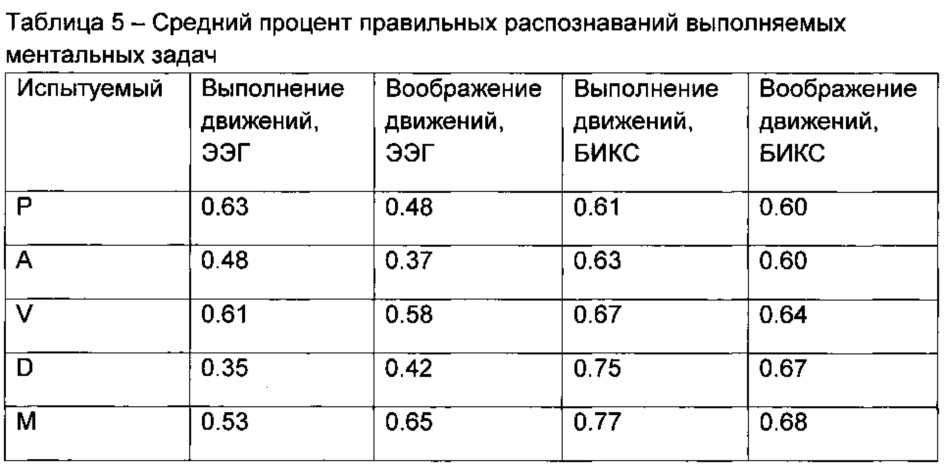
[93] Исследовали эффективность ИМК при распознавании совершаемых и воображаемых движений кисти левой или правой руки и состояния двигательного расслабления. Результаты по классификации паттернов активности мозга для каждого испытуемого приведены в табл. 5. Для трех используемых в экспериментах ментальных состояний случайный уровень правильных классификаций составляет 1/3. Уровень правильных классификаций у всех испытуемых достоверно превосходит случайный (Т-тест). Уровень правильных классификаций паттернов ЭЭГ примерно соответствует данным, полученным нами ранее. Точность классификации активности мозга по БИКС для всех испытуемых превосходила точность классификации по ЭЭГ.

Способ лечения нарушений чувствительности при синдроме гийена-барре
Способ оценки механизмов восстановления нарушенного двигательного навыка ходьбы у больных с ишемическим инсультом различной локализации поражения головного мозга в различные периоды заболевания
Способ реабилитации больных с церебральным инсультом
Способ выявления в коре головного мозга сенсомоторных зон, ответственных за локомоцию
Способ оперативного лечения закрытых оскольчатых языкообразных переломов пяточной кости
Способ реабилитации больных, перенесших инсульт
Способ скрининговой диагностики поражения сердца
Способ пластического замещения дефектов кожи лоскутами с удаленной области у детей
Способ лечения острого геморроя
Способ диагностики нейросифилиса
Способ лечения нарушений чувствительности при синдроме гийена-барре
Способ оценки механизмов восстановления нарушенного двигательного навыка ходьбы у больных с ишемическим инсультом различной локализации поражения головного мозга в различные периоды заболевания
Способ выявления в коре головного мозга сенсомоторных зон, ответственных за локомоцию
Способ оперативного лечения закрытых оскольчатых языкообразных переломов пяточной кости
Способ реабилитации больных, перенесших инсульт
Способ скрининговой диагностики поражения сердца
Способ пластического замещения дефектов кожи лоскутами с удаленной области у детей
Способ лечения острого геморроя
Способ диагностики нейросифилиса
Способ лечения острого постманипуляционного панкреатита

