Результат интеллектуальной деятельности: Способ информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления
Вид РИД
Изобретение
Изобретение относится к способам и системам информационного взаимодействия бортовых электронно-вычислительных машин с периферийными устройствами, в частности с навигационными приборами и устройствами.
Известен способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ (см. №2510585, H04L 29/00, 27.03.2014 г.), принятый за прототип. Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ включает в себя преобразование, передачу, прием измерительных и управляющих сигналов по линиям связи согласно протоколу информационного взаимодействия. Протокол информационного взаимодействия обеспечивает работу аппаратуры топопривязки и навигации в различных режимах. Передача информации между бортовой ЭВМ и системой топопривязки и навигации осуществляется двоичным цифровым последовательным кодом в асинхронном режиме. Информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием ААТН данных от бортовой ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из ААТН в бортовую ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма.
Недостатками прототипа являются:
- сложность встраивания аппаратных средств для функционирования в автоматизированных системах управления войсковыми подразделениями;
- недостаточная степень контроля текущего состояния и результатов встроенного контроля;
- отсутствие возможности организации полноценного дифференциального режима работы системы топопривязки и навигации, а также объекта управления наземного пункта управления за счет использования корректирующей информации;
- недостаточная степень надежности бесперебойности работы с используемой операционной системой компьютера.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационного взаимодействия системы топопривязки и навигации с программно-аппаратными средствами наземного пункта управления.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления, обеспечивающего передачу в программно-технический комплекс данных для решения задач топопривязки и навигации наземного пункта управления, текущего состояния и встроенного контроля, корректирующей информации для обеспечения дифференциального режима работы автономной навигационной аппаратуры объекта управления, прием от программно-технического комплекса параметров и режимов работы, корректирующей информации, полученной наземным пунктом управления по каналам автоматизированной системы управления войсками, для обеспечения дифференциального режима системы топопривязки и навигации.
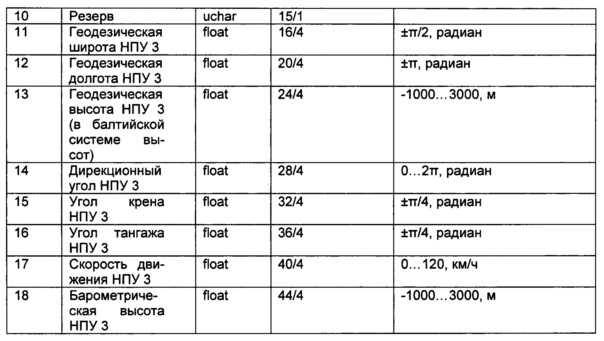
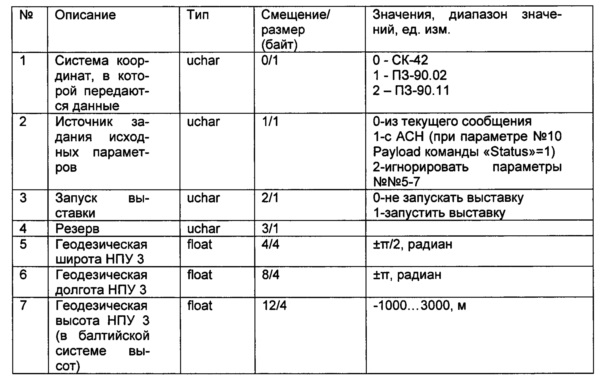
Указанный технический результат достигается тем, что в предлагаемом способе информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления, включающем в себя преобразование, передачу, прием измерительных и управляющих сигналов по линиям связи согласно протокола информационного взаимодействия, обеспечивающего работу системы топопривязки и навигации в нескольких режимах, реализующих операции по подготовке к работе, решению навигационных задач, задач тест-контроля, которые выполняются в соответствии с выстроенной определенным образом логикой обмена сообщениями, новым является то, что протокол информационного взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления реализуется с возможностью приема/передачи корректирующей информации, обеспечивающей дифференциальный режим работы как системы топопривязки и навигации, так и навигационной аппаратуры объекта управления, связь системы топопривязки и навигации с программно-техническим комплексом осуществляется через компьютер, обеспечивающий поступление навигационной информации по каналам Ethernet на автоматизированные рабочие места программно-технического комплекса и сервер хранения данных, организация взаимодействия системы топопривязки и навигации и программно-технического комплекса реализуется с возможностью автоматического выбора режима и скорости обмена информацией, логикой обмена сообщениями определено, что программно-технический комплекс является ведущим, формирующим командные сообщения, а система топопривязки и навигации - ведомой, формирующей ответные сообщения, управляющие сообщения передаются между программно-техническим комплексом и системой топопривязки и навигации пакетами переменной длины, имеющими общую структуру, включающую стандартные заголовки, собственно управляющее сообщение, состоящее из заголовка и полезных данных, которые в соответствии с присвоенными кодами размещены в поле командного или ответного сообщения, содержащем сведения с описанием, типом, размером и диапазоном значений с соответствующими единицами измерений, перечень командных сообщений программно-технического комплекса, выдаваемых системе топопривязки и навигации, содержит требования выдачи текущего состояния, режимов, параметров работы и идентификационных параметров системы топопривязки и навигации, данных для решения задач навигации и топопривязки, корректирующей информации для работы объекта управления в дифференциальном режиме, идентификационной информации, получения корректирующей информации для работы системы топопривязки в дифференциальном режиме, установки исходных параметров топопривязки наземного пункта управления, перечень ответных сообщений системы топопривязки и навигации программно-техническому комплексу содержит ответы с результатами опроса.
Реализация протокола информационного взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления с возможностью приема/передачи корректирующей информации, обеспечивающей дифференциальный режим работы как системы топопривязки и навигации, так и навигационной аппаратуры объекта управления, позволяет:
- снизить погрешности определения навигационных параметров;
- обеспечить выдачу корректирующей информации для обеспечения работы бортовой интегрированной навигационной системы беспилотного летательного аппарата, являющегося объектом управления, в дифференциальном режиме с возможностью выбора одного из различных источников:
а) дифференциальных поправок, получаемых с топопривязчиков в системе РВиА ЕСУ Т3 в соответствии с протоколом информационно-технического сопряжения;
б) корректирующей информации для навигационных сигналов ГЛОНАСС и GPS, формируемой аппаратурой спутниковой навигации.
Осуществление связи системы топопривязки и навигации с программно-техническим комплексом через компьютер, обеспечивающий поступление навигационной информации по каналам Ethernet на автоматизированные рабочие места программно-технического комплекса и сервер хранения данных, позволяет:
- обеспечить информационный обмен между системой топопривязки и навигации и автоматизированными рабочими местами наземного пункта управления:
а) выдачу текущих координат и высоты местоположения наземного пункта управления;
б) выдачу корректирующей информации для работы навигационной системы объекта управления;
в) выдачу времени по сигналам космических навигационных систем ГЛОНАСС и GPS;
г) выдачу дирекционного угла продольной оси, углов крена и тангажа наземного пункта управления.
Реализация организации взаимодействия системы топопривязки и навигации и программно-технического комплекса с возможностью автоматического выбора режима и скорости обмена информацией позволяет:
- оптимизировать процессы приема/передачи информационных потоков;
- упорядочить физический и канальный уровень интерфейса.
Закрепление за программно-техническим комплексом ведущей роли с возможностью формирования командных сообщений, а за системой топопривязки и навигации - роли ведомого, формирующего ответные сообщения, позволяет обеспечить выдачу ответных сообщений только на управляющие сообщения.
Передача управляющих сообщений между программно-техническим комплексом и системой топопривязки и навигации пакетами переменной длины, имеющими общую структуру, позволяет:
- упорядочить структуру передаваемых данных;
- разместить в поле командного или ответного сообщений сведения, необходимые для полного раскрытия цели переданного или полученного сообщения.
Включение в перечень командных сообщений программно-технического комплекса определенного набора требований позволяет:
- обеспечить процедуру начального пункта, загрузку программного обеспечения, встроенного самоконтроля и запуск системы топопривязки и навигации;
- обеспечить индикацию текущего состояния, выбранного режима, параметров работы и данных для решения задач навигации и топопривязки, полученной корректирующей информации для работы объекта управления в дифференциальном режиме.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
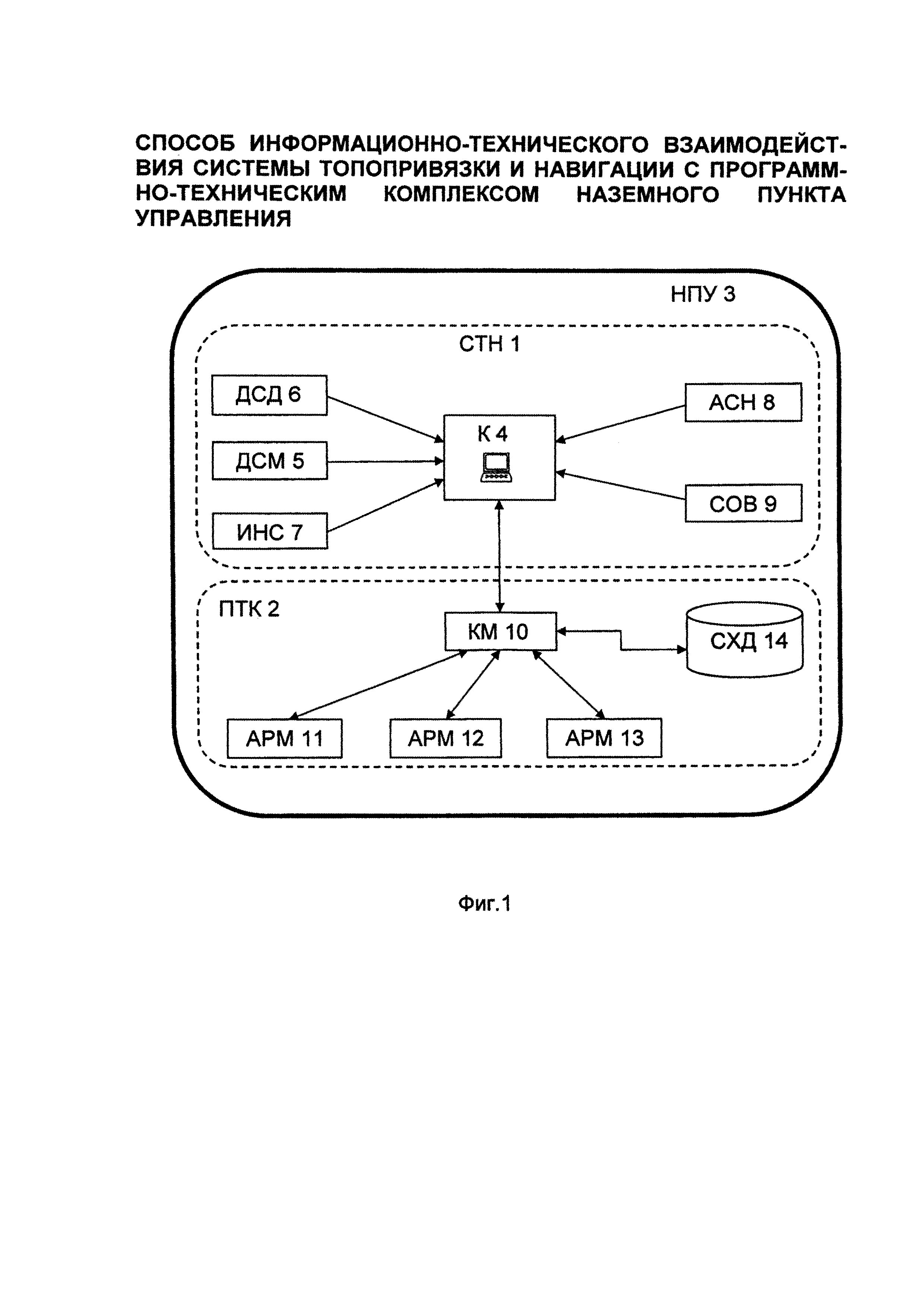
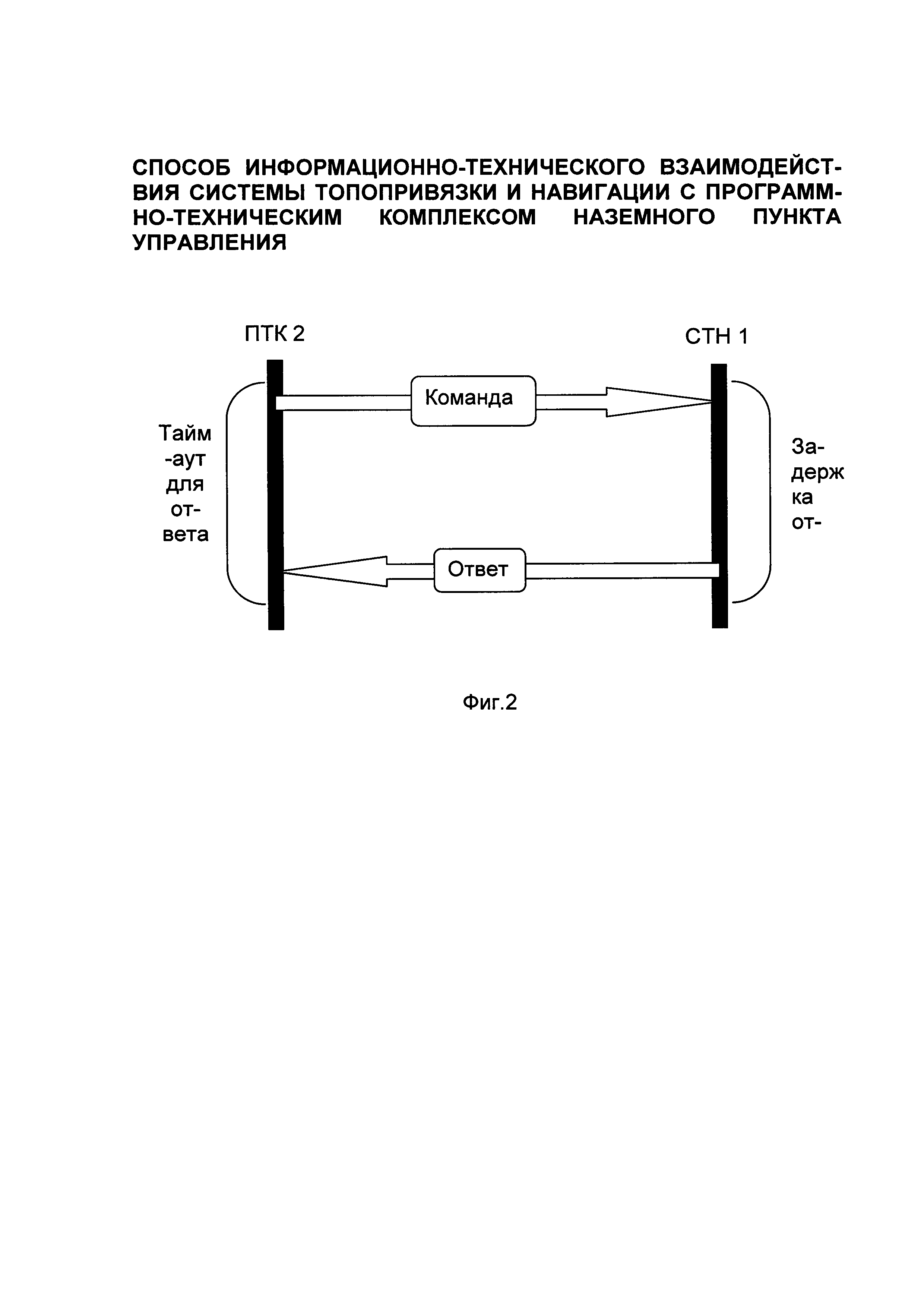
Сущность изобретения поясняется чертежами, где на фиг. 1 показана схема организации взаимодействия системы топопривязки и навигации в составе наземного пункта управления; на фиг. 2 - циклограмма исполнения команд управления.
Способ информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления реализуется следующим образом. Способ определяет взаимодействие системы топопривязки и навигации (СТН) 1 с программно-техническим комплексом (ПТК) 2 наземного пункта управления (НПУ) 3 в части:
- передачи в ПТК 2 данных решения задач топопривязки и навигации НПУ 3;
- передачи в ПТК 2 текущего состояния и результатов встроенного контроля;
- передачи в ПТК 2 корректирующей информации для обеспечения дифференциального режима работы инерциальной навигационной системы беспилотного летательного аппарата малой дальности (БЛА МД);
- приема от ПТК 2 параметров и режимов работы;
- приема от ПТК 2 корректирующей информации, полученной НПУ 3 по каналам автоматизированной системы управления вооруженных сил, для обеспечения дифференциального режима СТН 1.
СТН 1 используется для:
- автономной топопривязки и ориентирования НПУ 3;
- формирования корректирующих поправок для обеспечения дифференциального режима работы инерциальной системы БЛА МД.
Сопряжение СТН 1 с ПТК 2 НПУ 3 осуществляется через компьютер (К) 4, который связан по каналам связи с датчиком связи механическим (ДСМ) 5 и датчиком связи доплеровским (ДСД) 6, инерциальной навигационной системой (ИНС) 7, аппаратурой спутниковой навигации (АСН) 8 и системой определения высоты (СОВ) 9. ПТК 2 с одной стороны через коммутатор (КМ) 10 связан с К 4, с другой - с автоматизированными рабочими местами (АРМ) 11…13 и сервером хранения данных (СХД) 14. При подаче питания на СТН 1 осуществляется процедура начального пуска, загрузка программы, встроенный самоконтроль и запуск системы СТН 1 в режиме по умолчанию. Через 25 секунд после подачи питания система готова к обмену с ПТК 2 НПУ 3. Выбор дальнейшего режима работы СТН 1 определяется оператором НПУ 3.
Организация взаимодействия СТН 1 с ПТК 2 НПУ 3 организована следующим образом. Физический и канальный уровень интерфейса реализован в соответствии со стандартом Fast Ethernet 10/100 BaseTX с автоматическим выбором режима и скорости обмена. Для обеспечения обмена между ПТК 2 и СТН 1 используются следующие протоколы:
- на сетевом уровне - протокол IP;
- на транспортном уровне - протокол UDP.
Параметры сетевой конфигурации СТН 1 (IP-адрес, UDP-порт) при взаимодействии с ПТК 2 НПУ 3 являются конфигурируемыми.
Логика обмена сообщениями построена следующим образом. ПТК 2 НПУ 3 является ведущим, а СТН 1 - ведомой. СТН 1 в общем случае выдает ответные сообщения в ПТК 2 только на управляющие сообщения ПТК 2, именуемые командами. СТН 1 выдает ответные управляющие по тому физическому интерфейсу, на тот IP-адрес и на тот UDP-порт, от которых принята последняя команда управления от ПТК 2. СТН 1 на каждую команду ПТК 2 формирует и выдает одно ответное сообщение - ответ с результатами исполнения команды. Кроме того, ответ может содержать информацию о неисполнении команды. Максимальная задержка при выдаче ответа (тайм-аут) относительно момента приема команды зависит от конкретной команды и составляет не более 100 мс. Управляющие сообщения передаются между ПТК 2 и СТН 1 пакетами переменной длины. Пакет сообщения имеет следующую общую структуру:

Таким образом, пакет сообщения включает стандартные заголовки Ethernet, IP, UDP и собственно управляющее сообщение, состоящее из заголовка и полезных данных. Заголовок имеет следующую структуру:

SrcID/DstID - уникальный логический идентификатор отправителя/получателя сообщения:
- для СТН 1 значение полей SrcID/Ds равно 0хА1;
- для ПТК 2 значение полей SrcID/Ds равно 0x71;
Length - полная длина сообщения, включая заголовок (максимальный размер сообщения не может превышать 1400 байт);
SN - порядковый номер сообщения. Сообщения нумеруются независимо для каждого кода сообщений;
OpCode - код сообщения, значения которого - в диапазоне от 10001 до 10999;
ResCode - код выполнения команды, формируется только в ответе, при этом:
0 - команда выполнена успешно;
1 - длина пакета не соответствует длине команды;
2 - команда не выполнена, длина команды не соответствует коду команды;
3 - команда не выполнена, недопустимый код команды;
4 - команда не выполнена, некорректные параметры команды в поле Payload (например, вне допустимого значения);
5 - команда не выполнена, аппаратура неисправна;
6 - команда не выполнена, аппаратура занята;
7 - команда не выполнена, нет необходимых данных для исполнения команды;
8 - команда не выполнена, другая причина;
Spare - резерв.
Примечания:
1 Параметр SN, содержащийся в команде от ПТК 2, возвращается с тем же значением в составе ответа на эту команду.
2 Несанкционированные сообщения комплексом не нумеруются (параметр SN устанавливается в нулевое значение).
3 Значение поля ResCode в команде устанавливается в нулевое значение. Далее при описании структур сообщений:
- все числовые значения, представленные в шестнадцатеричной системе счисления имеют префикс 0х. Десятичные значения префикса не имеют;
- порядок передачи полей - слева направо. Порядок байтов в числовых полях - в соответствии с порядком «big-endian» (старшим байтом вперед);
- типы данных соответствуют стандарту ANSI/IEEE Std 754;
- резервные поля сообщения заполняются нулями.
В поле Poyload сообщения содержатся данные команды или ответа в соответствии с кодом сообщения.
Перечень команд ПТК 2 с кодами соответствующих ответов, выдаваемых СТН 1:
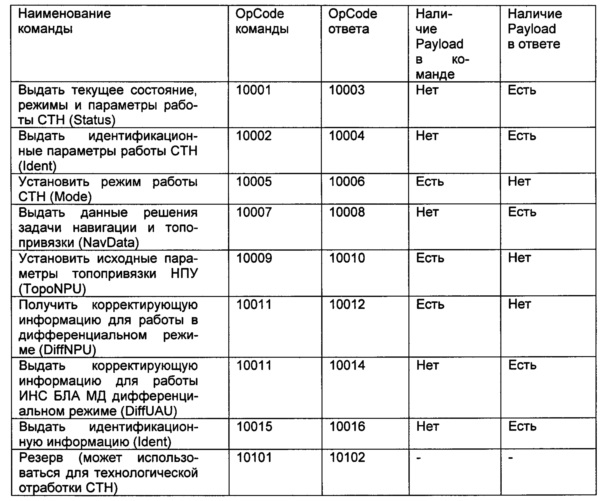
Команда «Status»
Назначение: опрос текущего состояния СТН 1, включающий текущие параметры и режимы работы СТН 1, результаты встроенного самоконтроля.
Поле Payload: нет.
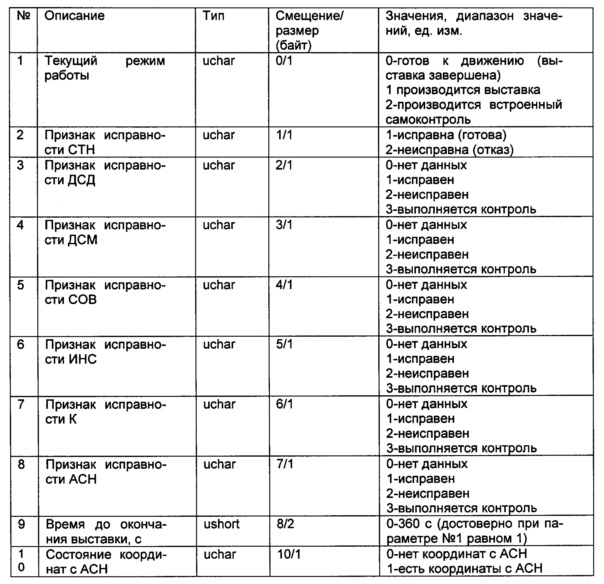
Ответ на команду «Status»
Назначение: ответ на команду «Status» с результатами текущего состояния, параметрами и режимом работы СТН 1, результатами встроенного самоконтроля.
Поле Payload:
Команда «Mode»
Назначение: задание режима работы СТН 1.
Поле Payload:

Ответ на команду «Mode»
Назначение: ответ на команду «Mode» с результатами задания режима работы СТН 1.
Поле Payload: нет.
Команда «Ident»
Назначение: запрос идентификационных данных СТН 1.
Поле Payload: нет.
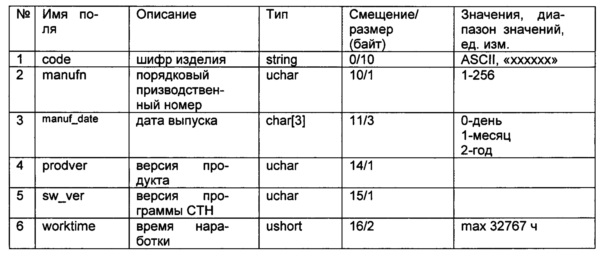
Ответ на команду «Ident»
Назначение: ответ на команду «Ident» с идентификаторами СТН 1.
Поле Payload:
Команда «NavData»
Назначение: запрос данных решения задачи навигации и топопривязки НПУ 3.
Поле Payload: нет.
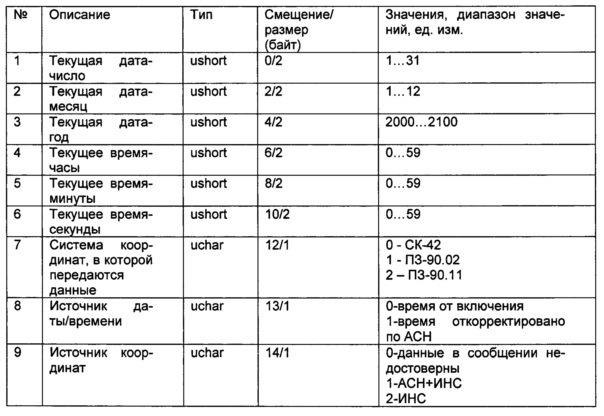
Ответ на команду «NavData»
Назначение: ответ на команду «NavData» с результатами решения задачи навигации и топопривязки НПУ 3.
Поле Payload:

Команда «TopoNPU»
Назначение: задание исходных параметров топопривязки НПУ 3.
Поле Payload:
Ответ на команду «TopoNPU»
Назначение: ответ на команду «TopoNPU» с результатами задания исходных параметров топопривязки НПУ 3.
Поле Payload: нет.
Команда «DiffNPU»
Назначение: задание корректирующей информации для работы СТН 1 в дифференциальном режиме.
Поле Payload:

Ответ на команду «DiffNPU»
Назначение: ответ на команду «DiffNPU» с результатами задания корректирующей информации для работы СТН 1 в дифференциальном режиме.
Поле Payload: нет.
Команда «DiffUAV»
Назначение: запрос корректирующей информации для работы ИНС БЛА МД в дифференциальном режиме.
Поле Payload: нет.
Ответ на команду «DiffUAF»
Назначение: ответ на команду «DiffUAF» с корректирующей информацией для работы ИНС БЛА МД в дифференциальном режиме.
Поле Payload:

Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления, обеспечивающего передачу в программно-технический комплекс данных для решения задач топопривязки и навигации наземного пункта управления, текущего состояния и встроенного контроля, корректирующей информации для обеспечения дифференциального режима работы автономной навигационной аппаратуры объекта управления, прием от программно-технического комплекса параметров и режимов работы, корректирующей информации, полученной наземным пунктом управления по каналам автоматизированной системы управления войсками, для обеспечения дифференциального режима системы топопривязки и навигации.
Способ информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления, включающий в себя преобразование, передачу, прием измерительных и управляющих сигналов по линиям связи согласно протоколу информационного взаимодействия, обеспечивающего работу системы топопривязки и навигации в нескольких режимах, реализующих операции по подготовке к работе, решению навигационных задач, задач тест-контроля, которые выполняются в соответствии с выстроенной определенным образом логикой обмена сообщениями, отличающийся тем, что протокол информационного взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления реализуется с возможностью приема/передачи корректирующей информации, обеспечивающей дифференциальный режим работы как системы топопривязки и навигации, так и навигационной аппаратуры объекта управления, связь системы топопривязки и навигации с программно-техническим комплексом осуществляется через компьютер, обеспечивающий поступление навигационной информации по каналам Ethernet на автоматизированные рабочие места программно-технического комплекса и сервер хранения данных, организация взаимодействия системы топопривязки и навигации и программно-технического комплекса реализуется с возможностью автоматического выбора режима и скорости обмена информацией, логикой обмена сообщениями определено, что программно-технический комплекс является ведущим, формирующим командные сообщения, а система топопривязки и навигации - ведомой, формирующей ответные сообщения, управляющие сообщения передаются между программно-техническим комплексом и системой топопривязки и навигации пакетами переменной длины, имеющими общую структуру, включающую стандартные заголовки, собственно управляющее сообщение, состоящее из заголовка и полезных данных, которые в соответствии с присвоенными кодами размещены в поле командного или ответного сообщения, содержащем сведения с описанием, типом, размером и диапазоном значений с соответствующими единицами измерений, перечень командных сообщений программно-технического комплекса, выдаваемых системе топопривязки и навигации, содержит требования выдачи текущего состояния, режимов, параметров работы и идентификационных параметров системы топопривязки и навигации, данных для решения задач навигации и топопривязки, корректирующей информации для работы объекта управления в дифференциальном режиме, идентификационной информации, получения корректирующей информации для работы системы топопривязки в дифференциальном режиме, установки исходных параметров топопривязки наземного пункта управления, перечень ответных сообщений системы топопривязки и навигации программно-техническому комплексу содержит ответы с результатами опроса.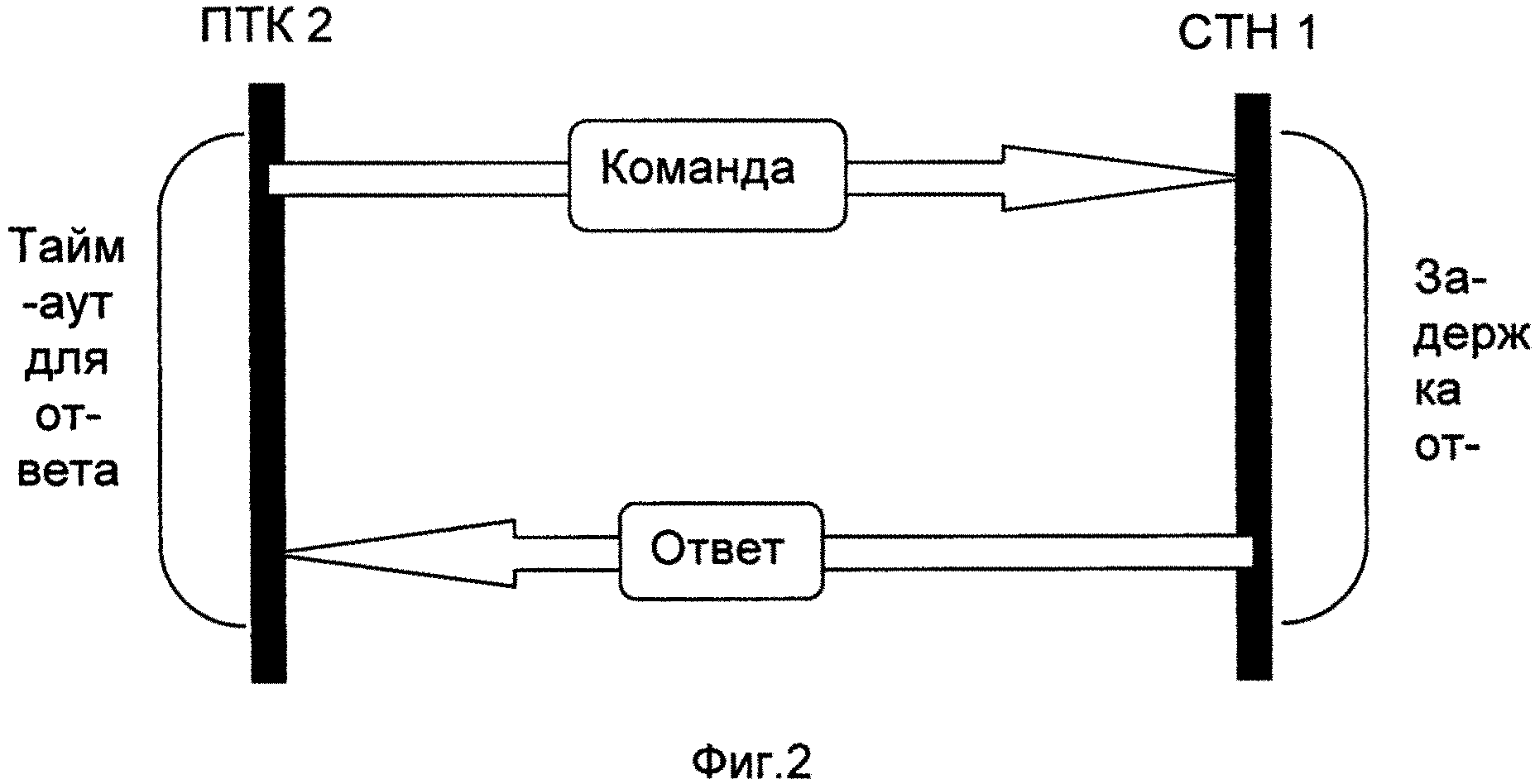
Устройство для установки в нем пусковой трубы с ракетой индивидуального использования
Устройство для автоматического снятия передней крышки с пусковой трубы переносного зенитного ракетного комплекса (пзрк)
Струйно-вихревой топливовоздушный смеситель
Глушитель шума выпуска
Система спуска-стопорения оружейной установки
Автоматическое стрелковое оружие
Станок для рядовой намотки
Способ изготовления цилиндрических оболочек
Способ изготовления ствола автоматического стрелкового оружия
Термошкаф
Механизм подъема антенны
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Осколочно-фугасная боевая часть

