Результат интеллектуальной деятельности: Манипулятор-трипод параллельно-последовательной структуры
Вид РИД
Изобретение
Изобретение относится к подъемно-транспортным средствам, используемым для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами ограниченной грузоподъемности.
Известен также кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания (RU 2053191 С1, МПК6 В66С 23/44, 1996). В этом манипуляторе исключается, по крайней мере, один недостаток - достигается более равномерная загрузка всех гидроцилиндров, поскольку закрепленные на основании цилиндры перекомпонованы, и растягивающие усилия воспринимают два цилиндра, а для поворота основания предусмотрено два цилиндра.
Технический недостаток данного крана-манипулятора: наличие зоны неустойчивой работы, которая наступает, когда вертикальная ось шарнира основания и центр шарнира крепления цилиндров поворота на основании располагаются примерно на одной вертикальной геометрической оси; недостаточные эксплуатационно-технологические показатели из-за ограниченной погрузочной высоты и вынужденного демонтажа (и неиспользования) собственного кузова транспортного средства; усложнен алгоритм управления пятью цилиндрами. Эти недостатки сводят на нет достоинство манипулятора - расширение зоны действия в горизонтальной плоскости.
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания, при этом вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины, при этом упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства (Патент РФ №2207317, В66С 23/44, опубл. 27.06.2003).
Технический недостаток данного крана-манипулятора: недостаточные функциональные возможности грузозахватного органа из-за ограниченной степени подвижности с одной вращательной кинематической парой 5-го класса, отсутствие возможности управления грузозахватным органом.
Известен грузоподъемный кран, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы, на котором с помощью шарниров закреплены три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, для поворота основания предусмотрен дополнительный гидроцилиндр (SU 594021, МПК2 В66С 23/44, 1978).
Технический недостаток известного грузоподъемного крана: недостаточные функциональные возможности из-за ограниченной погрузочной высоты и необходимости демонтажа (и неиспользования) собственного кузова транспортного средства; нерациональная загрузка гидроцилиндров - верхний цилиндр, закрепленный на основании, и цилиндр поворота основания, воспринимающие неблагоприятные растягивающие усилия, являются наиболее нагруженными.
Данное изобретение принято нами в качестве прототипа.
Технический результат: повышение маневренности, увеличение функциональных возможностей за счет обеспечения дополнительными степенями подвижности в конструкции грузозахватного устройства, а также для его управления с помощью шаговых двигателей.
Указанный технический результат достигается тем, что манипулятор-трипод параллельно-последовательной структуры, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, с целью расширения зоны действия крана и повышения жесткости конструкции, он снабжен дополнительным цилиндром, размещенным на основании, выполненном в виде плоской треугольной фермы, одна сторона которой закреплена на транспортном средстве с возможностью поворота в вертикальной плоскости, согласно изобретению, в точке соединения трех цилиндров с помощью пятиподвижного шарнира закреплен трехстепенной управляемый захват, представляющий собой три последовательно соединенных между собой механизма, конструкции которых соединены с помощью вращательных цилиндрических шарниров с кинематической парой пятого класса, и для их поворота предусмотрены шаговые двигатели, закрепленные на конструкции механизмов.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем на обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует критерию «Новизна» по существующему законодательству.
Изобретение поясняется чертежами.
На фиг. 1 изображен общий вид манипулятора-трипода параллельно-последовательной структуры.
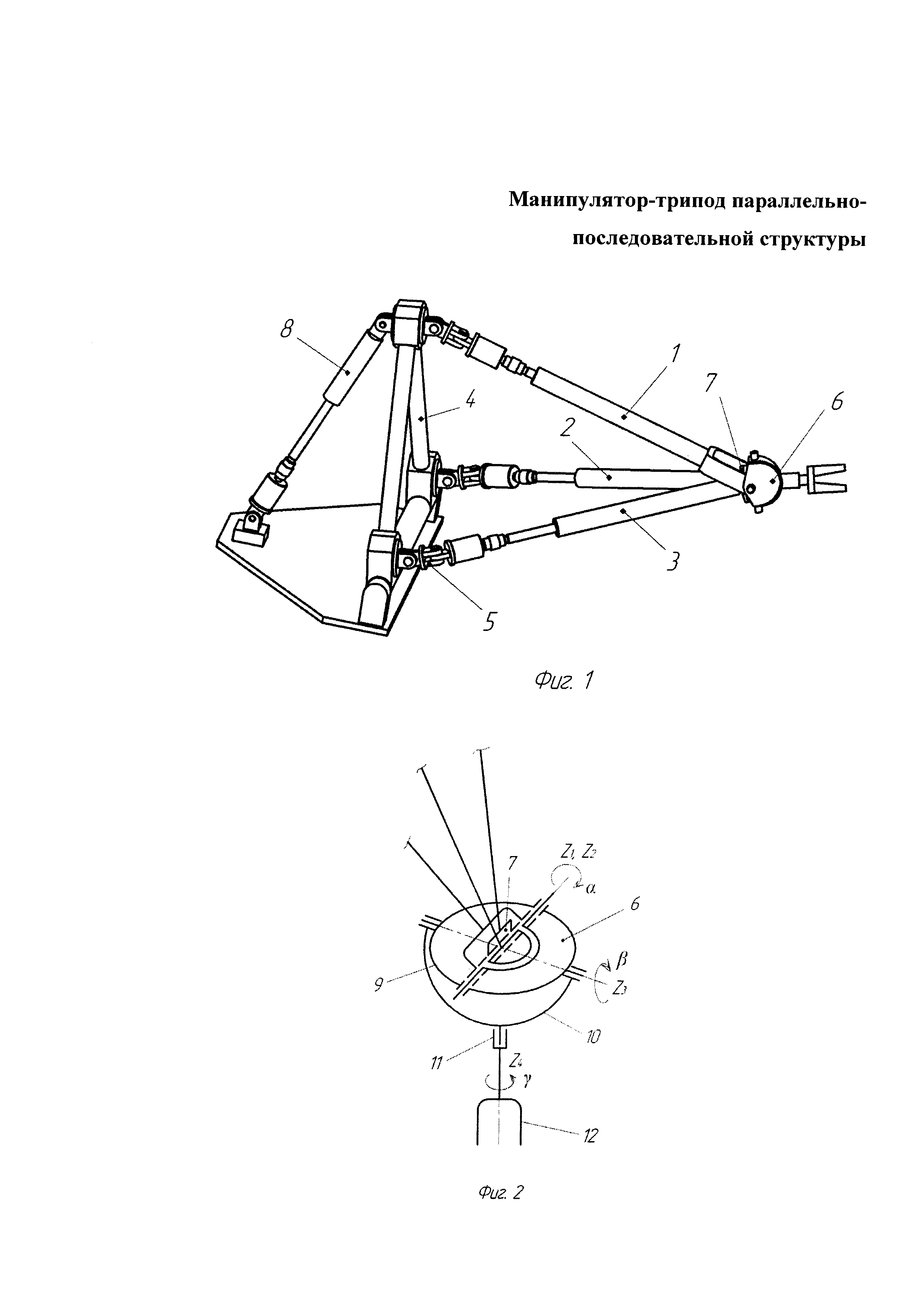
На фиг. 2 - кинематическая схема трехстепенного управляемого захвата.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Предлагаемый манипулятор-трипод параллельно-последовательной структуры состоит из пространственного приводного трехстержневого механизма в виде треугольной пирамиды со звеньями переменной длины. Механизм содержит три звена 1, 2, 3 (фиг. 1), концы которых закреплены в вершинах на поворотном основании 4 в виде треугольной фермы с помощью двухстепенных шарниров 5. Противоположные концы трех звеньев 1-3 соединены между собой и с трехстепенным управляемым захватом 6 посредством особого сферического шарнирного устройства 7 с пятью степенями свободы. Основание 4 крепится к транспортному средству двумя нижними вершинами треугольной фермы с помощью цилиндрических шарниров вращения с кинематической парой пятого класса. Для поворота основания 4 предусмотрен дополнительный подвижный стержневой привод 8, который одним концом соединяется с верхней третьей вершиной треугольной фермы, а другим концом к транспортному средству с помощью цилиндрических шарниров вращения с кинематической парой пятого класса.
Трехстепенной управляемый захват 6 (фиг. 2) содержит три механизма 9, 10, 11 и схват 12, расположенных последовательно друг за другом, конструкции которых соединяются между собой цилиндрическими шарнирами вращения. При этом ось симметрии Z2 механизма 9 трехстепенного управляемого захвата 6 совпадает с осью симметрии Z1 пятиподвижного сферического шарнира 7, а ось Z3 механизма 10 располагается под угол 90° к оси симметрии Z2 механизма 9. Схват 12, шарнирно соединенный цилиндрическим шарниром с механизмом 11, может выполнять поворот на 360° вокруг оси симметрии Z4 механизма 11. Для вращения всех трех механизмов 9-11 предусмотрены шаговые двигатели, которые крепятся корпусами или выходными валами к конструкциям механизмов 9-11 (на фиг. 1 и фиг. 2 не указаны).
Работа манипулятора-трипода параллельно-последовательной структуры осуществляется следующим образом.
Перемещение схвата 12 по траектории в заданную точку позиционирования, находящуюся в зоне обслуживания манипулятора-трипода, можно осуществить в несколько этапов. На первом (основном) этапе перемещение обеспечивается работой пространственного четырехстержневого механизма, который располагает трехстепенной управляемый захват 6 непосредственно над указанным объектом. Дальнейшие манипуляции проделываются работой трехстепенным управляемым захватом 6, который ориентирует (разворачивает) схват 12 посредством трех последовательно расположенных механизмов 9-11.
Увеличение или уменьшение длины штока хотя бы одного звена 1, 2 или 3 пространственного приводного стержневого механизма, способствует изменению геометрии пространственной структуры, представленной в виде пирамиды, образованной основанием 4 и звеньями переменной длины механизмов 1-3. Вследствие этого сферический пятиподвижный шарнир 7, соединяющий противоположные концы звеньев 1-3 в одной точке, находящейся в вершине пирамиды, увлекает за собой трехстепенной управляемый захват 6 и схват 12. Для увеличения зоны обслуживания манипулятора-трипода необходимо включить дополнительный подвижный стержневой привод 8, который поворачивает в вертикальной плоскости основание 4, закрепленное нижними вершинами треугольной фермы с транспортным средством посредством цилиндрических шарниров вращения с кинематическими парами пятого класса. Шарниры 5 соединяют одни концы звеньев 1-3 стержневого механизма с вершинами треугольной фермы основания 4 и обеспечивают необходимую двухстепенную подвижность этих звеньев относительно основания 4. Таким образом, максимальное перемещение схвата 12 выполняет параллельно-пространственная структура манипулятора-трипода. Дальнейшее регулирование оптимального положения схвата 12 в пространстве осуществляется под управлением механизмов 9-11 трехстепенного подвижного управляемого захвата 6. На каждом из механизмов 9, 10 или 11 установлено по одному шаговому двигателю, которые крепятся к конструкциям механизмов 9-11 корпусами или выходными валами двигателя. При включении какого-либо шагового двигателя, конструкция любого из механизмов 9-11 управляемого захвата 6 начинает поворачиваться на определенный угол относительно своей оси симметрии. При этом конструкция механизма 9 поворачивается на угол α вокруг оси Z2, соответственно конструкция механизма 10 на угол β вокруг оси Z3, а конструкция механизма 11 на угол γ вокруг оси Z4. Полный поворот на 360° углов α и β не возможен из-за размеров конструкции самих механизмов, только конструкция механизма 11 позволяет вращать схват 12 на угол γ>360° вокруг оси Z4. После того как схват 12 полностью сориентируется в нужное положение, происходит заключительный этап - захват и перенос указанного объекта в другое место.
Таким образом, манипулятор-трипод параллельно-последовательной структуры, обладая дополнительными степенями подвижности в конструкции грузозахватного устройства, повышает маневренность и увеличивает свои функциональные возможности.
Манипулятор-трипод параллельно-последовательной структуры, установленный на транспортном средстве, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, с целью расширения зоны действия крана и повышения жесткости конструкции он снабжен дополнительным цилиндром, размещенным на основании, выполненном в виде плоской треугольной фермы, одна сторона которой закреплена на транспортном средстве с возможностью поворота в вертикальной плоскости, отличающийся тем, что в точке соединения трех цилиндров с помощью пятиподвижного шарнира закреплен трехстепенной управляемый захват, представляющий собой три последовательно соединенных между собой механизма, конструкции которых соединены с помощью вращательных цилиндрических шарниров с кинематической парой пятого класса, и для их поворота предусмотрены шаговые двигатели, закрепленные на конструкции механизмов.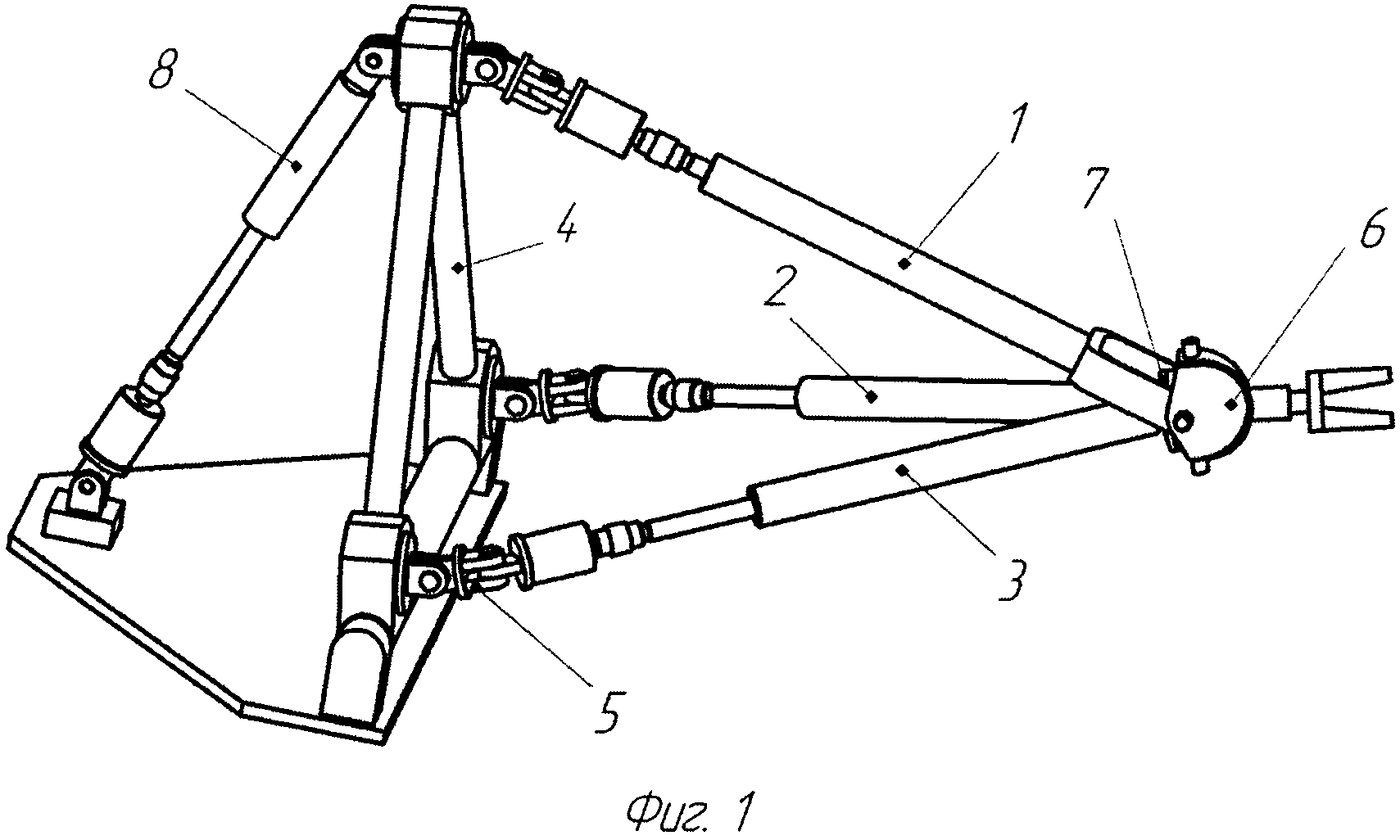
Новые производные ванадия, обладающие гипогликемической активностью
Способ полосовой химической обработки растений
Способ упрочнения лезвия рабочего органа почвообрабатывающего орудия из высокопрочного чугуна
Способ повышения износостойкости рабочих органов из высокопрочного чугуна co - лазером
Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна
Способ отбора качественного зерна зерновых колосовых и зернобобовых культур на семена
Композиция безглютенового пирожного
Средство для лечения некробактериоза крупного рогатого скота
Рабочий орган орудия для полосовой глубокой обработки почвы
Кондитерское изделие из нута и способ его получения
Система локально-внутрипочвенного орошения многолетних насаждений
Навесной вилочный погрузчик

