Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ НАПРАВЛЕНИЯ ПОСТУПЛЕНИЯ НАВИГАЦИОННЫХ СИГНАЛОВ В ПРИЕМНИК ПОСЛЕ ОТРАЖЕНИЯ ОТ СТЕН В СПУТНИКОВОЙ СИСТЕМЕ ПОЗИЦИОНИРОВАНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается способа оценки направления поступления навигационных сигналов в приемник после отражения от стен в спутниковой системе позиционирования. Изобретение можно применять для любой спутниковой системы позиционирования, использующей приемники типа GNSS (Глобальная навигационная спутниковая система), такие как приемники GPS (Глобальная система позиционирования) или Galileo и оно позволяет улучшить подавление эффекта множества лучевых траекторий в спутниковой системе позиционирования.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В спутниковой системе позиционирования, использующей приемник типа GNSS, установленный на борту подвижного объекта, сигналы данных, позволяющие приемнику вычислять свое положение, поступают от различных спутников, принадлежащих к одной группировке спутников позиционирования. Группировка содержит, по меньшей мере, четыре спутника для определения четырех неизвестных, соответствующих географическим x, y, z и временным t координатам приемника. Позиционирование подвижного объекта при помощи приемника осуществляют в два этапа. На первом этапе приемник принимает радиоэлектрические сигналы, являющиеся навигационными сигналами, поступающими от четырех спутников группировки, и на втором этапе приемник производит оценку расстояний, отделяющих подвижный объект от четырех спутников, от которых приняты сигналы, и определяет положение подвижного объекта, используя триангуляционный метод. Ошибка в определении положения подвижного объекта может иметь катастрофические последствия в случае применения в гражданской авиации или в случае геолокализованного платного участка шоссейной дороги.
Существуют самые разные источники ошибок позиционирования, которые могут повлиять на достоверность информации положения, определяемых при помощи спутниковой системы позиционирования. Ошибка позиционирования может быть связана с технической проблемой при приеме сигналов GNSS, например, такой как неисправность приемника или сбой при передаче информации, используемой спутниковой группировкой. Надежность положения, определенного при помощи спутниковой системы позиционирования, зависит также от окружающей среды, в которой находится подвижный объект.
В случае авиационного приложения, применяемого в гражданской авиации, приемнику не мешают никакие препятствия, поэтому радиоэлектрические сигналы поступают от спутников напрямую без отражения от какой-либо стены. В этом случае существуют системы SBAS (Satellite-Based Augmentation Systems), позволяющие получать надежную информацию, связанную с положением, вычисленным приемником авиационного подвижного объекта. Системы SBAS контролируют и постоянно ограничивают ошибки, возникающие на орбите спутников при синхронизации каждого спутника по опорному времени группировок, и ошибки, связанные с распространением радиоэлектрических сигналов в верхних слоях атмосферы, в частности, в ионосфере. Информация, выдаваемые системой SBAS, позволяют приемнику авиационного подвижного объекта определять положение подвижного объекта, а также предел ошибки положения.
Приложения, относящиеся к геолокализованному платному участку дороги, предусматривают определение дороги, по которой движется наземный подвижный объект, оборудованный приемником GNSS, и выставление счета пользователю наземного подвижного объекта, если эта дорога является платной. Поскольку выставление счета зависит от используемой дороги, приемник должен выдавать две дополнительные информации, касающиеся, с одной стороны, положения подвижного объекта и, с другой стороны, траектории подвижного объекта. Поскольку от этих информаций зависит выставление счета, необходимо также определять надежную информацию, касающуюся используемой траектории.
Однако, в случае приложения для геолокализованной дорожной оплаты, условия приема радиоэлектрических сигналов являются гораздо более сложными и гораздо менее контролируемыми, чем в случае авиационного приложения. В данном случае гораздо труднее ограничить ошибку положения, определяемого приемником.
В городской среде, навигационные сигналы, исходящие от одного или двух, или трех спутников группировки, могут встречать на своем пути здания и не доходить до приемника подвижного объекта. В этом случае искажается геометрия совокупности спутников, используемых для вычисления положения подвижного объекта, что может сделать невозможным вычисление положения подвижного объекта.
Точно так же, в неблагоприятной наземной среде навигационные сигналы, передаваемые спутником группировки, могут отражаться от некоторых стен, прежде чем попасть в приемник. Это явление, называемое явлением многотраекторного распространения, существенно сказывается на точности положения, вычисляемого приемником. Действительно, измеряемый приемником путь в этом случае является более длинным, чем расстояние, разделяющее подвижный объект и соответствующий спутник. Это приводит к ошибке в методе триангуляции и, таким образом, в положении подвижного объекта. В этом случае последствие является двойным, поскольку, с одной стороны, ошибка положения является существенной, и, с другой стороны, приемник не имеет возможности узнать, что он совершил ошибку, или оценить совершенную ошибку. Или ошибки, совершаемые приемником, могут привести к ошибочному выводу о выбранной дороге и, следовательно, к ошибочному выставлению счета.
Существуют способы преодоления многотраекторных распространений, согласно которым используют приемную антенную решетку и анализируют сигнал, принимаемый каждой из антенн решетки, для определения углов поступления сигналов, отраженных от стен до попадания в приемник. Пример такого способа описан, в частности, в документе [Multipath mitigation methods based on antenna array, S. Rougerie, ION NTM 2011]. Однако эти способы имеют существенный недостаток, связанный с длиной волны рассматриваемых сигналов. Действительно, в такой антенной решетке расстояние, разделяющее 2 антенны, должно превышать половину длины волны принимаемого сигнала. Одной из классических технологий является формирование пучка антенн в направлении поступления сигнала, предаваемого спутником, что позволяет уменьшить коэффициент усиления антенны в направлении потенциальных отражений, где угол поступления отличается от угла в направлении рассматриваемого спутника. Направленность такой антенной решетки зависит непосредственно от числа используемых антенн. Большая направленность, обеспечивающая эффективное подавление, требует большого числа антенн и, следовательно, большого размера решетки.
Во многих приложениях, таких как геолокализация транспортных средств, размер решеток ограничен и не позволяет использовать большое число антенн.
В этом случае для ослабления пучка в идентифицированном направлении или идентифицированных направлениях применяют методы идентификации угла поступления отраженных сигналов. Однако в рамках этих методов тоже возникает ряд проблем. Как показано в документе [Multipath mitigation methods based on antenna array, S. Rougerie, ION NTM 2011], первая проблема связана с процессом оценки углов поступления отраженных сигналов, который требует предположения в отношении оцениваемого числа отражений. От точности этого предположения зависит эффективность процесса оценки углов поступления и, следовательно, эффективность процесса подавлений многотраекторного распространения и его влияния на качество измерения линейного расстояния, отделяющего приемник от спутника. Вторая проблема касается качества калибровки антенной решетки, то есть знания точного расстояния между отдельными антеннами. Эффективность оценки углов поступления отраженных сигналов зависит от точности этой информации.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЕ
Задачей изобретения является решение этих проблем и предложение способа оценки направления поступления отраженных навигационных сигналов в системе спутникового позиционирования, позволяющий улучшить подавление влияния многотраекторного распространения и повысить качество измерения расстояния между приемником GNSS и, по меньшей мере, одним спутником группировки и, следовательно, качество измерения положения приемника GNSS, находящегося на борту подвижного объекта.
В связи с этим объектом изобретения является способ оценки направления поступления навигационных сигналов, отраженных от стен до попадания в приемник системы спутникового позиционирования GNSS, при этом система позиционирования содержит, по меньшей мере, один спутник, выполненный с возможностью передачи навигационных сигналов, приемник, установленный на подвижном объекте и выполненный с возможностью приема навигационных сигналов и оценки положения упомянутого приемника, при этом способ характеризуется тем, что содержит этапы, на которых:
a. устанавливают на подвижном объекте антенную решетку, содержащую, по меньшей мере, две антенны,
b. устанавливают в приемник подвижного объекта трехмерную географическую карту,
c. оценивают положение приемника на основании навигационных сигналов, принятых антенной антенной решетки,
d. на основании трехмерной географической карты и оцененного положения приемника определяют свое положение на сцене, соответствующей окружающей среде, в которой находится приемник, и, начиная от приемника, производят трассировку луча,
e. исходя из результата трассировки луча, геометрически выводят число траекторий распространения с отражением от стен, присутствующих на сцене,
f. выбирают алгоритм оценки углов поступления многотраекторного распространения, при этом многотраекторное распространение соответствует сигналам, отраженным от стен, инициализируют этот алгоритм при помощи числа траекторий распространения, определенных на этапе е), и на основании этого выводят углы поступления траекторий распространения с отражением от стен.
Предпочтительно углы поступления многотраекторного распространения определяют при помощи выбранного алгоритма на основании анализа сигналов, принятых каждой из антенн антенной решетки.
Предпочтительно перед этапом с) оценки положения приемника способ содержит предварительный этап, на котором оценивают погрешность информации расстояния, связанную с многотраекторным распространением, при этом предварительный этап содержит следующие этапы, на которых:
- оценивают первое псевдорасстояние, соответствующее первой информации расстояния между спутником и приемником, полученной на основании обработки сигнала, принятого первой антенной антенной решетки,
- оценивают второе псевдорасстояние, соответствующее второй информации расстояния между спутником и приемником, полученной на основании обработки сигнала, принятого второй антенной антенной решетки,
- получают разность между двумя оценками, полученными на этапах а) и b), и на ее основании выводят типовое математическое отклонение, соответствующее этой разности,
- ограничивают погрешность информации расстояния, связанную с многотраекторным распространением, при помощи показателя, зависящего от типового математического отклонения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве не ограничительного примера, со ссылками на прилагаемые схематичные чертежи, на которых:
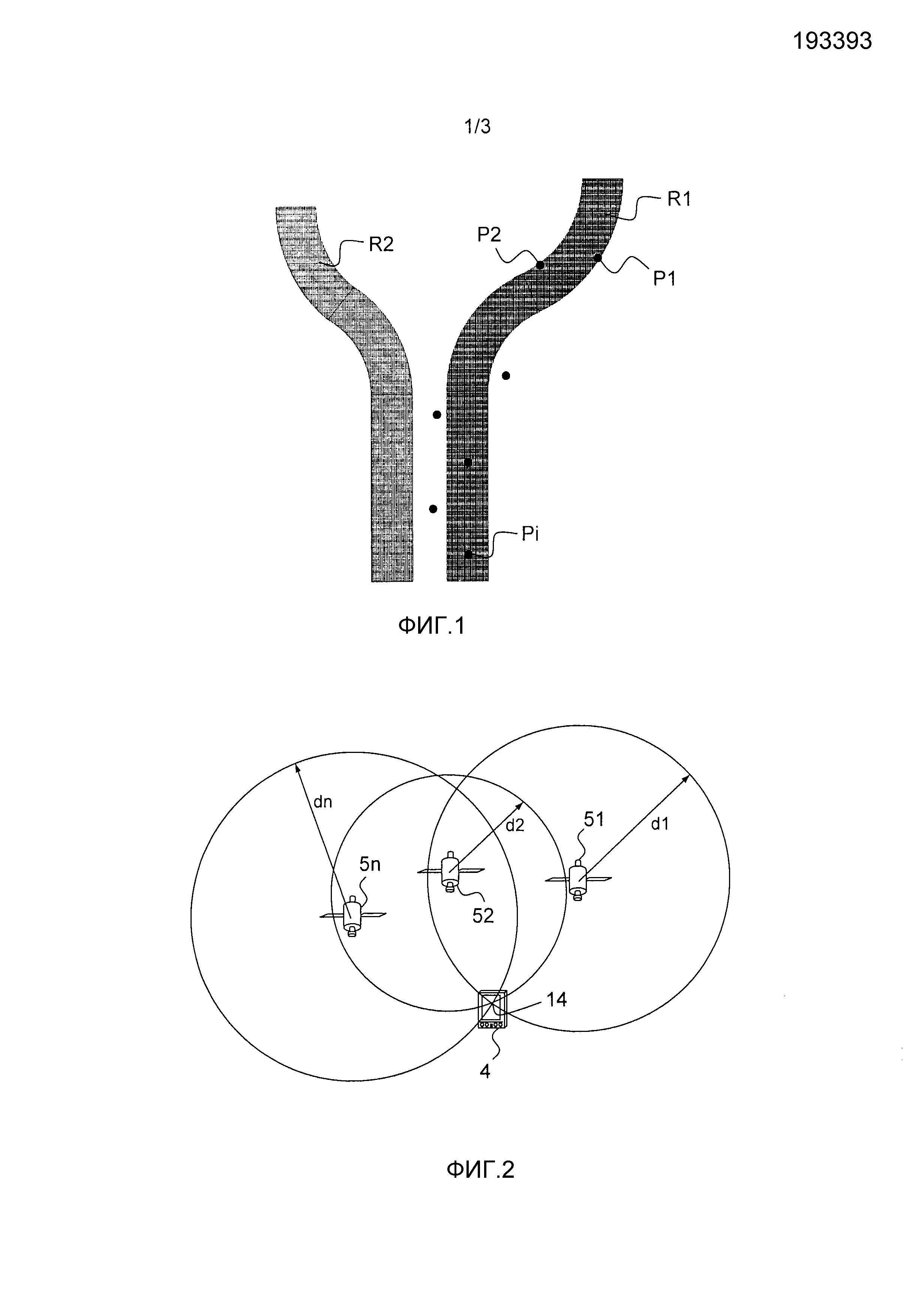
Фиг. 1 - схема примера типовой дорожной системы в соответствии с изобретением.
Фиг. 2 - пример, иллюстрирующий определение положения подвижного объекта, оборудованного приемником GNSS, в соответствии с изобретением.
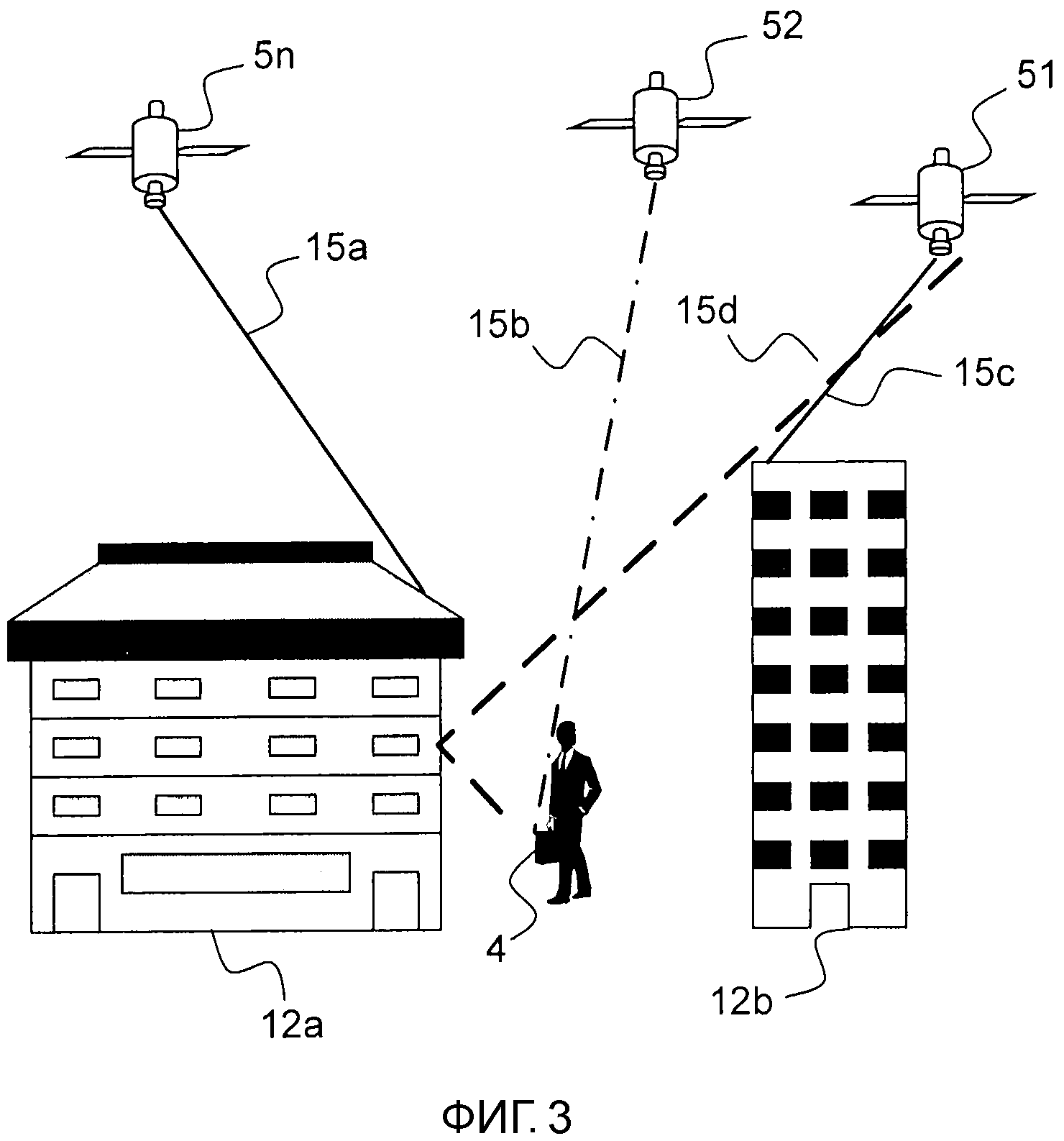
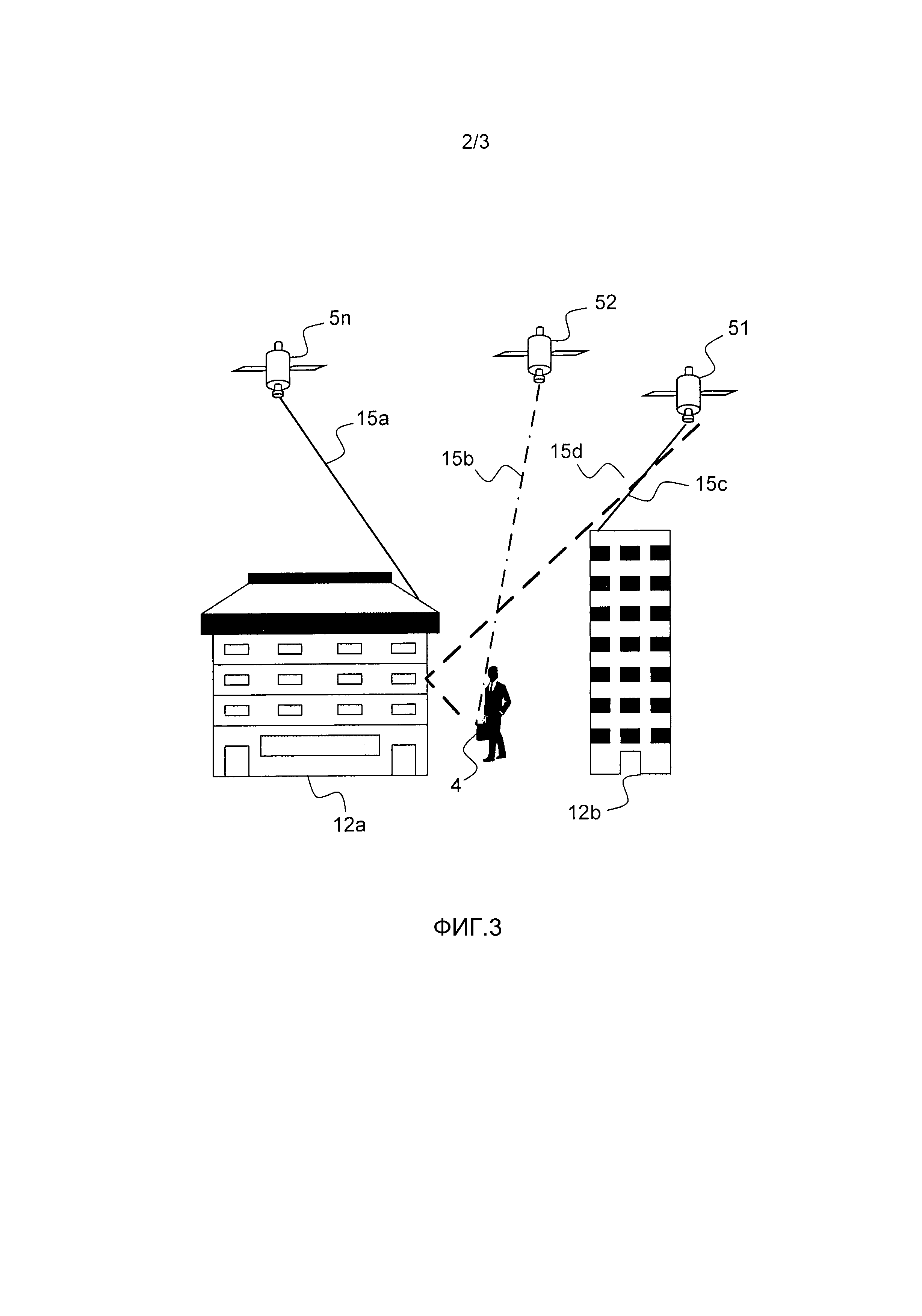
Фиг. 3 - схема, иллюстрирующая городскую окружающую среду, в соответствии с изобретением.
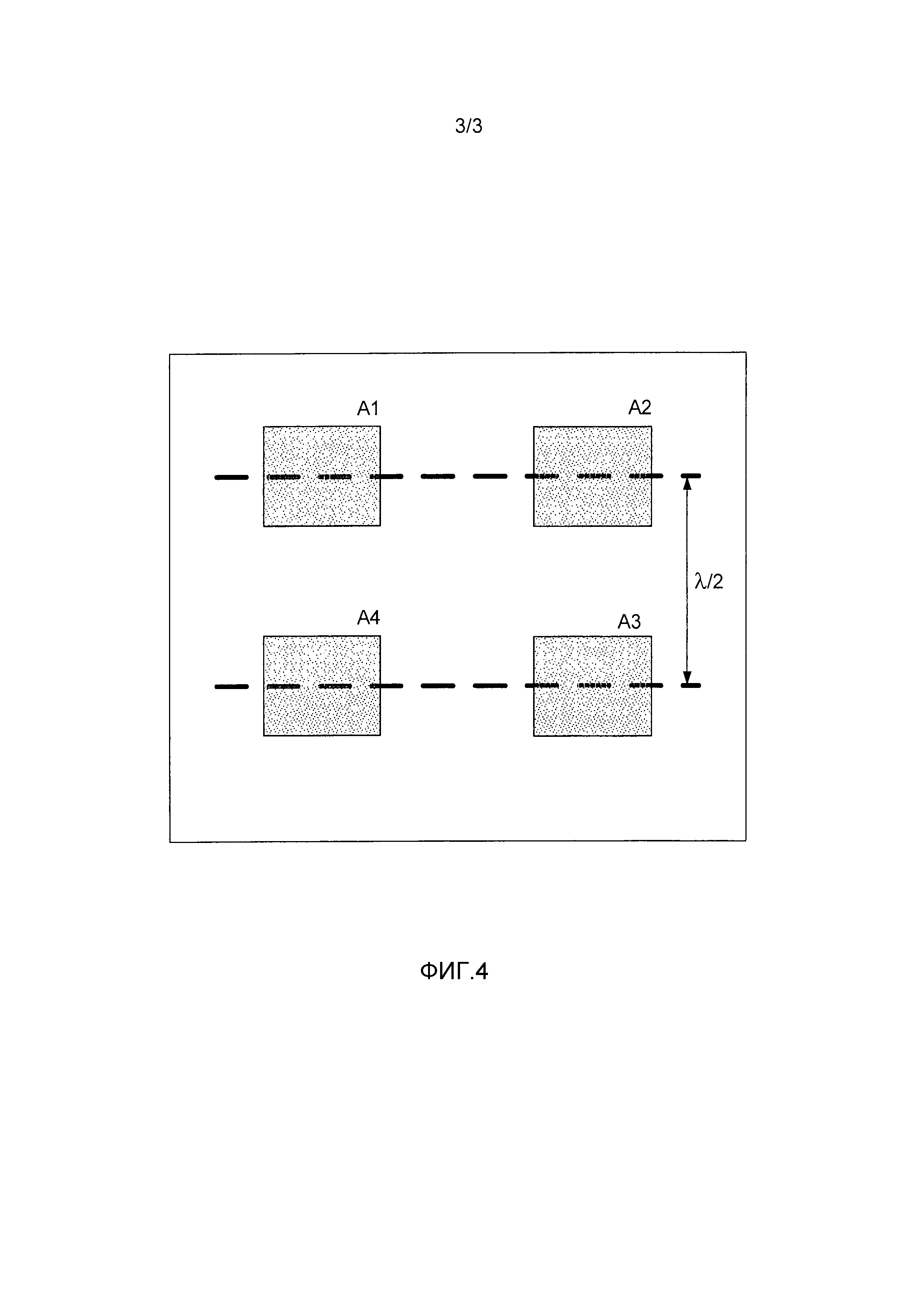
Фиг. 4 - пример антенной решетки, в соответствии с изобретением.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
На фиг. 1 представлена схема примера типовой дорожной системы, содержащей две возможные дороги R1, R2. Дорога R1 является платной, дорога R2 не является платной. Несколько подвижных объектов, оборудованных приемником GNSS, движутся по платной дороге R1. На положения Р1-Pi, где i является целым числом, превышающим 1, различных подвижных объектов, определяемые приемниками GNSS каждого подвижного объекта, влияют ошибки. Совершенные ошибки могут привести к ошибочному выводу относительно выбранной дороги и, следовательно, к ошибочному выставлению счета.
Пример определения положения подвижного объекта, оборудованного приемником GNSS 4, схематично представлен на фиг. 2. Приемник 4 определяет расстояния d1, d2,…, dn, где n является целым числом, превышающим или равным 4, которые отделяют его, по меньшей мере, от четырех спутников 51, 52,…, 5n группировки, при этом на фиг. 2 показаны только три спутника, затем на их основании определяет точку пересечения 14, по меньшей мере, четырех сфер, центры которых находятся в четырех спутниках и которые имеют круговую поверхность, проходящую через приемник 4, при этом центр каждой сферы физически представляет собой положение спутника 51-5n группировки, и она имеет радиус, соответствующий одному из расстояний d1-dn. Положение приемника GNSS 4 и, следовательно, подвижного объекта, оборудованного этим приемником 4, соответствует этой точке пересечения 14. Измерение расстояний d1-dn в приемнике 4 происходит посредством хронометража времени поступления радиоэлектрических сигналов, образующих навигационное сообщение, от спутников 51-5n. Радиоэлектрические сигналы, передаваемые каждым спутником, содержат информацию, необходимую для вычисления положения приемника, причем эта информация модулирована кодом, который может быть, например, периодическим псевдослучайным кодом расширения. Скорость передачи данных медленнее, чем скорость передачи кода. Например, в случае сигнала GPS код расширения имеет период 1 мс и скорость передачи 1023 бит в секунду, тогда как скорость передачи данных составляет 50 бит в секунду. Все данные, добавляемые по модулю 2 к коду расширения, передаются на несущей частоте. Как правило, в случае сигнала GPS несущая частота равна 1,57542 ГГц. Основная информация, которая поступает от каждого спутника в виде навигационного сообщения и которая должна обрабатываться приемником 4, включает в себя время передачи сообщения и положение спутника в момент передачи радиоэлектрического сигнала. Спутник может также передавать другую информацию, такую как некоторые поправки, которые необходимо внести в бортовое время спутника, параметры коррекции скорости распространения сигналов в слоях земной атмосферы и приблизительные положения других спутников, при помощи данных, называемых альманахом. Спутник передает в своем навигационном сообщении свои эфемериды (кеплеровские параметры), позволяющие приемнику 4 вычислить положение спутника в системе координат, привязанной к Земле. В случае сигнала GPS эфемериды включают в себя 16 параметров, повторяющихся каждые 30 секунд в навигационном сообщении.
После получения положения спутника приемнику 4 остается определить время передачи сообщения, чтобы вывести из него время распространения сигнала, переданного соответствующим спутником, расстояние до упомянутого спутника и радиус соответствующей сферы. Время передачи сообщения включено в содержание навигационного сообщения, передаваемого спутником, и в случае системы GPS повторяется каждые десять секунд. Вместе с тем, для времени, считываемого из навигационного сообщения, следует применять поправку на спутниковое время, чтобы привести передаваемое время к системе отсчета, общей для всех спутников. Эта поправка передается каждые тридцать секунд.
Когда время передачи сообщения раскодировано и скорректировано, приемник выводит из него время распространения радиоэлектрического сигнала посредством определения разности между временем приема и временем передачи навигационного сообщения. Эта информация, скорректированная поправкой на погрешности скорости распространения сигналов в различных слоях земной атмосферы, таких как ионосфера, дает приемнику оценку расстояния, отделяющего его от спутника. Используя сигналы, поступающие, по меньшей мере, от четырех спутников 51-5n группировки, приемник 4 выводит на их основании свое положение и, следовательно, положение подвижного объекта, на котором он находится, при помощи известного метода триангуляции.
В городской среде, как показано на фиг. 3, некоторые поступающие от спутников сигналы 15а, 15с отражаются стенами зданий 12а, 12b, окружающих приемник 4 и не попадают в приемник 4, другие сигналы 15b поступают непосредственно в приемник 4, и третьи сигналы 15d поступают в приемник после отражения от стен здания 12а, такого как многоэтажное здание. Чтобы избежать ошибок в определении расстояний между спутником и приемником, важно иметь возможность устранения сигналов, отраженных от стен, таких как стены здания, и проходящих по путям 15d многотраекторного распространения, прежде чем попасть в приемник 4. Для этого, согласно изобретению, используют приемник 4, находящийся у подвижного пользователя, например, пешехода, или у пользователя, передвигающегося в подвижном транспортном средстве, и антенную решетку, установленную на подвижном объекте, например, на крыше транспортного средства, при этом антенная решетка позволяет определять углы поступления сигналов, отраженных от стен зданий. Каждая антенна соответственно соединена со схемой обработки сигналов, принятых упомянутой антенной. Пример антенной решетки, содержащей четыре антенны А1, А2, А3 и А4, показан на фиг. 4. Четыре антенны отстоят друг от друга на расстояние, равное половине длины волны λ/2, и не согласованы друг с другом. Каждая антенна может быть, например, выполнена в виде металлической пластинки, и четыре металлические пластинки, соответствующие четырем антеннам, могут иметь одинаковый размер и могут быть расположены в виде квадрата. Для определений траекторий распространения с отражением от стен здания, необходимо знать искомое число траекторий распространения с отражением. Например, если подвижный объект находится рядом со стеной, первая часть навигационного сигнала, передаваемого спутником и достигающая приемника, проходит по прямой траектории, вторая часть сигнала достигает сначала стены, затем отражается от стены и только после этого попадает в приемник. Если недалеко от приемника находятся две стены, то может происходить два последовательных отражения от двух стен, прежде чем сигнал достигнет приемника.
Для нахождения числа траекторий распространения с отражением можно производить последовательные итерации с использованием предположений. В этом случае первое предположение состоит в том, что существует только одна траектория распространения с отражением, затем две траектории распространения с отражением, затем три траектории распространения с отражением. При каждой итерации алгоритм используют таким образом, чтобы на основании информации о числе траекторий распространения с отражением анализировать сигнал, принятый каждой из антенн решетки, и определять углы поступления сигналов, отраженных стенами зданий. В конце каждой итерации показатель качества свидетельствует о надежности полученных углов поступления. Когда все итерации завершены, выбирают только то предположение, которое имеет наилучший показатель качества. Этот способ работает хорошо, но его недостатком является то, что он является слишком долгим и требует слишком большого времени вычисления.
Для нахождения числа траекторий распространения с отражением, согласно заявленному способу, используют информацию трехмерной картографии, позволяющую, на основании приблизительного положения приемника и для каждого сигнала, передаваемого спутником, определять число траекторий распространения с отражением от стен, прежде чем сигнал достигает приемника. Для этого в приемник GNSS 4 устанавливают трехмерную географическую карту.
Для данного положения 14 приемника GNSS при помощи трехмерной географической карты производят трассировку луча, начиная от приемника, для определения различных отражений от стен, представленных графически в виде граней, зданий, окружающих упомянутый приемник. Трассировку луча производят при помощи классического графического способа, применяемого например в области трехмерных электронных игр, согласно которому от двух точек сцены находят все прямолинейные траектории распространения, прямые и с отражением от граней, находящихся на сцене, которые позволяют геометрически связать эти две точки. Таким образом, как показано на фиг. 3, знание трехмерной среды, окружающей приемник 4, позволяет определить отражение сигнала, передаваемого спутником 51, по траектории распространения 15с.
Определение отражений радиочастотных сигналов от отражающих стен, производимое при помощи трехмерной географической карты, является приблизительным, так как отражения не являются чисто геометрическими. Зато осуществляемая таким образом оценка позволяет определить число основных отражений. С другой стороны, их угол поступления и их интенсивность не являются надежными.
Согласно изобретению, результат оценки числа многотраекторных распространений, полученный с использованием трехмерной географической карты, затем используют в начале алгоритма оценки углов поступления многотраекторных распространений для инициализации этого алгоритма. На основании информации о числе траекторий распространения с отражением алгоритм анализирует сигнал, принимаемый каждой из антенн решетки, и определяет углы поступления сигналов, отражаемых стенами зданий.
Способ в соответствии с изобретением обеспечивает хорошую оценку углов поступления различных отраженных сигналов. При применении правила амплитуды и фазы для приемных каналов антенн, входящих в состав антенной решетки, он позволяет ослабить диаграмму направленности антенны в упомянутых направлениях поступления упомянутых многотраекторных распространений. Наконец, в зависимости от числа рассматриваемых многотраекторных распространений и от числа антенн антенной решетки, заявленный способ позволяет оценить остаточное возмущение измерения. Это остаточное значение является показателем качества измерения расстояния между приемником и спутником.
Оценка направлений поступления многотраекторных распространений, а также методы трассировки луча являются сложными с точки зрения числа вычислительных операций. Для оптимизации способа оценки направления поступления многотраекторных распространений предпочтительно изобретение может содержать предварительный этап, на котором оценивают уровень многотраекторных распространений, прежде чем начать описанный выше способ оценки. Оценка уровня многотраекторных распространений состоит в том, чтобы на основании навигационных сигналов, принятых, по меньшей мере, двумя разными антеннами, отстоящими друг от друга на половину длины волны и входящими в состав антенной решетки, определить две информации расстояния, называемых псевдорасстояниями и касающихся расстояния, разделяющего приемник и спутник. Затем, согласно способу, получают разность между двумя значениями псевдорасстояний, полученными при помощи двух антенн. В случае, когда уровень многотраекторных распространений является низким, разность между задержками, оцениваемыми каждым из контуров отслеживания кода расширения, связанным с каждой антенной, дает почти нулевой результат, соответствующий фоновому шуму, при этом фоновой шум соответствует тепловому шуму двух приемных схем двух антенн, хорошую аппроксимацию которого получают при помощи гауссова «белого» шума.
В случае высокого уровня многотраекторных распространений дисперсия разности задержки, получаемая контурами отслеживания кода расширения, применяемыми для двух разных радиочастотных схем, будет большой. Обозначим  псевдорасстояние, измеренное контуром кода расширения, обрабатывающим сигнал спутника k, принятый первой антенной, и
псевдорасстояние, измеренное контуром кода расширения, обрабатывающим сигнал спутника k, принятый первой антенной, и  - псевдорасстояние, измеренное контуром кода расширения, обрабатывающим сигнал, принятый второй антенной. Разность
- псевдорасстояние, измеренное контуром кода расширения, обрабатывающим сигнал, принятый второй антенной. Разность  является разностью пути между спутником и 2 антеннами. Оцениваемое при помощи этой разности типовое отклонение, то есть математическая величина, соответствующая квадратному корню дисперсии и выраженная как
является разностью пути между спутником и 2 антеннами. Оцениваемое при помощи этой разности типовое отклонение, то есть математическая величина, соответствующая квадратному корню дисперсии и выраженная как  , является оценочной функцией мощности шума, добавляемого окружающей средой.
, является оценочной функцией мощности шума, добавляемого окружающей средой.
Таким образом, точность измерения псевдорасстояния на антенне может быть ограничена:  .
.
Этот показатель позволяет обнаружить присутствие малоблагоприятной окружающей среды и, следовательно, напрямую ограничить погрешность измерения псевдорасстояния.
Изобретение было описано в связи с частными вариантами выполнения, но, разумеется, оно не ограничивается этими вариантами и охватывает все технические эквиваленты описанных средств, а также их комбинации, если они не выходят за рамки изобретения.
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Распределенная архитектура для радионавигационного оборудования
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн

