Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ОДНОЛУЧЕВЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к гидрографии, в частности к способам и техническим средствам определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории.
Известен широко используемый в настоящее время способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, включающий погружение до заданного горизонта или до дна акватории приемной гидроакустической антенны (вибратора) эхолота или отражающей поверхности в виде доски (диска), закрепленными на маркированном кабель-тросе или тросе, соответственно, при этом осуществляется излучение гидроакустического сигнала судовым эхолотом и прием этого же сигнала погруженным приемным вибратором или прием отраженного этого же сигнала от отражающей поверхности приемной антенной судового эхолота, измерение гидроакустическим способом глубины погружения приемного вибратора или отражающей поверхности Zэ с одновременным определением этой же глубины погружения (горизонта тарирования) Zгт маркированным тросом, определение по полученным данным поправки ΔZт к глубине, измеренной эхолотом расчетным путем по следующей формульной зависимости:

где Нв - углубление излучающего вибратора судового эхолота;
l - горизонтальное расстояние между излучающим вибратором судового эхолота и опускаемыми приемной антенной или отражающей поверхностью (см., например, «Инструкция по промеру». - Л: издание Управления гидрографической службы ВМФ, 1964 г., - сс. 109-111 [1]).
Известно также тарирующее устройство однолучевого эхолота (см. там же), содержащее передатчики и измерительный приемный блок, расположенные на судне и подключенные соответственно к излучающему судовому вибратору и приемному погружаемому вибратору, блок управления, соединенный с измерительным приемным блоком и передатчиком, причем погружаемый приемный вибратор закреплен на кабель-тросе с метками для измерения глубины погружения приемной антенны.
Недостатки известных способа и тарирующего устройства определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна, заключается в том, что они имеют недостаточную точность и ограниченную глубину тарирования.
Это объясняется тем, что глубина погружения приемного вибратора или тарирующей доски Zгт определяется глазомером по меткам на кабель-тросе или маркирующем тросе относительно уровня воды без учета прогиба кабель-троса вследствие воздействия на погруженный приемный вибратор или доску (диск) подводного течения и дрейфа судна. Это приводит к тому, что поправка эхолота, вычисляемая без учета изменения величин Zгт и l, определяется неточно. Вследствие того, что с увеличением глубины удержания погруженных приемного вибратора или тарирующей доски (диска) из-за их значительного дрейфа под воздействием течения в зоне облучения антенны судового эхолота становится затруднительным, это ограничивает возможный диапазон определения поправок глубины, как показывает опыт, до величины в 30-40 м, в результате чего обеспечивается определение поправок по всему диапазону измеряемых эхолотом глубин.
Кроме того, известный способ и тарирующее устройство не отвечают современным требованиям единства измерений, так как не обеспечивают получение поправки с нормированными метрологическими характеристиками.
Погрешность определения поправки ΔZт данным способом и тарирующим устройством можно оценить по формуле, которую можно получить, дифференцируя выражение (1) по переменным Zгт, Нв и l и переходя затем к средним квадратическим погрешностям (СКП) определения этих величин:

где σгт, σн, σl - СКП определения величин Zгт, Hв и l.
Вычисленные по формуле (2) и отнесенные к глубине горизонта тарирования средние квадратические погрешности (СКП) определения поправки эхолота существующими способом и устройством при значениях Zгт=10; 40 м; R=2,5 м, при погрешностях измерения глубины тарирования от 0,06 до 0,55 м и при погрешности учета горизонтального отстояния погружаемой антенны или отражающей поверхности (доски, диска) от 0,5 до 4,5 м, при СКП измерения заглубления антенны эхолота равной 0,2 м составили от 1,5 до 4% Соответственно такая точность определения поправки существенно снижает качество съемки рельефа дна акватории, поскольку инструментальная погрешность у современных промерных эхолотов составляет 0,03-0,4% (см., например, Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September. - p. 44-51 [2]).
Известен способ определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна (авторское свидетельство SU №913814 от 16 ноября 1981 г. «Тарирующее устройство эхолота» [3]), включающий погружение до заданного горизонта или до дна в заданном месте (местах) акватории приемного вибратора, излучение гидроакустического сигнала излучающим вибратором по направлению до приемного погружаемого вибратора, измерение расстояния Si между данными вибраторами гидроакустическим способом и с помощью маркированного кабель-троса, а также определение искомых поправок ΔZт расчетным путем.
Известно также тарирующее устройство эхолота [3], содержащее передатчик и измерительный блок, расположенные на судне и подключенные соответственно к излучающими приемным вибраторам, блок управления, соединенный с измерительным приемным блоком и передатчиком, причем приемный вибратор закреплен на маркированном кабель-тросе; излучающий вибратор установлен на корпусе поплавка, в котором имеется отверстие для кабель-троса; метки кабель-троса выполнены в виде утолщений с возможностью взаимодействия со стопорным блоком, который установлен на поплавке и соединен с блоком управления. Стопорный блок выполнен в виде электромагнита с подпружиненным сердечником, который уменьшает отверстие в поплавке.
Недостатком данных способа и устройства определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна является их недостаточно высокая точность. При их использовании также имеет место погрешность учета искривления кабель-троса и горизонтального отклонения приемной антенны от излучающей антенны эхолота под совместным воздействием сил, обусловленных наличием течения и дрейфа судна. Данная погрешность, как и в предыдущем случае, составит от 1,5 до 4%.
Кроме того, применение известных способа и тарирующего устройства возможно только лишь для устаревших аналоговых промерных эхолотов, поскольку истинное расстояние между излучающим и приемным вибраторами определяется по меткам, расположенным на кабель-тросе глазомерно и по записи на аналоговом регистраторе. Для современных цифровых эхолотов необходимо, чтобы истинная глубина погружения приемного вибратора измерялась прибором с цифровым электронным выходом с целью обеспечения автоматизации процесса определения и учета поправки к глубинам, измеренным современными цифровыми эхолотами при съемке рельефа дна. Таким образом, погрешность определения поправки существующими способами и устройствами превосходит инструментальную погрешность современных эхолотов, а максимальная глубина тарирования не превышает 40 м, что не удовлетворяет современным требованиям к качеству съемки рельефа дна и необходимости определения поправок измерительными средствами с нормированными метрологическими характеристиками во всем диапазоне измеряемых эхолотом глубин.
Кроме того, технология определения поправки эхолота, основанная на известных способах и устройствах тарирования, затрудняет автоматизацию процессов сбора и обработки информации.
Известен также способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории (см. патент RU №2292062 от 20 января 2007 г. «Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, и устройство для его осуществления» [4]) наиболее близкий по технической сущности к заявленному способу, включающий погружение до заданного горизонта или до дна в заданном месте (местах) акватории, а затем подъем до поверхности акватории расположенные на нижнем конце вертикально удерживаемой базы излучающей и приемной антенны эхолота, датчиков гидростатического давления и температуры, а на верхнем конце базы датчиков гидростатического давления и температуры, при этом погружении и подъеме одновременно с излучением гидроакустического сигнала и измерением расстояния до поверхности воды дополнительно синхронно измеряют гидростатическое давление и температуру на верхнем и нижнем концах базы, фиксируют исправленные температурной поправкой величины гидростатического давления, начиная с момента погружения и заканчивая моментом всплытия верхнего конца базы, а истинные значения поправок ΔZгт глубин определяют расчетным путем по следующим формульным зависимостям:
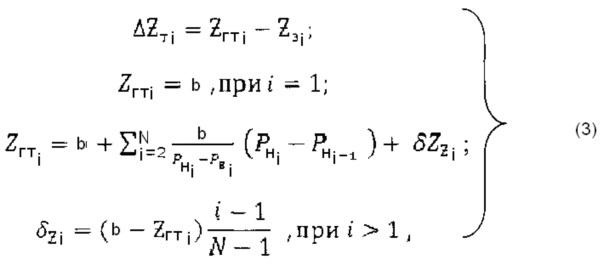
где i (i=1, 2, …, N) - номер посылки излучающего вибратора, начиная с момента погружения в воду верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
 - истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
- истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
 - расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
- расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
b - длина вертикальной базы;
 , PН - гидростатические давления, измеренные при i-м излучении вибратора эхолота датчиками гидростатического давления соответственно на нижнем и верхнем концах базы и исправленные поправкой за измеренную датчиками температуру воды на глубине положения гидростатических датчиков;
, PН - гидростатические давления, измеренные при i-м излучении вибратора эхолота датчиками гидростатического давления соответственно на нижнем и верхнем концах базы и исправленные поправкой за измеренную датчиками температуру воды на глубине положения гидростатических датчиков;
 ,
,  - гидростатические давления, измеренные соответственно при i-Й И i-1-Й излучениях вибратором эхолота и исправленные поправкой за измеренную температуру воды на глубине положения гидростатических датчиков, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
- гидростатические давления, измеренные соответственно при i-Й И i-1-Й излучениях вибратором эхолота и исправленные поправкой за измеренную температуру воды на глубине положения гидростатических датчиков, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
 - поправка глубины горизонта тарирования (погружения приемного вибратора) в случае образования невязки (b-Zгт) при достижении верхним концом базы поверхности воды.
- поправка глубины горизонта тарирования (погружения приемного вибратора) в случае образования невязки (b-Zгт) при достижении верхним концом базы поверхности воды.
Известно также тарирующее устройство эхолота [4], наиболее близкое по технической сущности с заявленным тарирующим устройством, содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор, блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью, закрепленную в кардановом подвесе с возможностью спуска на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления совместно с излучающей и приемной антеннами и датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, с возможностью излучения гидроакустического сигнала до поверхности акватории по вертикали и приема отраженного от нее сигнала, блок определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход - с входом регистратора.
Недостатком данных способа и устройства определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, является то, что процесс определения данных поправок сложен и трудоемок, поскольку необходимо использование для определения эталонной глубины двух гидростатических датчиков и двух датчиков температуры воды.
Это обусловлено тем, что на акватории съемки рельефа дна в местах определения данных поправок необходимо калибровать датчики измерения гидростатического давления и температуры воды с целью определения цены деления их измерительных шкал и определения ухода нуля их отсчета в течении определенного времени, для чего необходимо иметь на съемочном судне метрологическую лабораторию со специальной метрологической аппаратурой.
В процессе погружения датчиков гидростатического давления и температуры воды необходимо обеспечить синхронность их измерения гидростатического давления и температуры воды на концах базы, для чего необходимо иметь четырехканальный измерительный приемным блок со специальным блоком управления.
Кроме того, известные данные способ и устройство не обеспечивают определения геодезических координат глубины погружения приемоизлучающей гидроакустической антенны однолучевого эхолота, а следовательно, не обеспечивают создания на акватории съемки опорных гидрографических пунктов для калибровки эхолотов на акватории съемки с целью обеспечения единства измерений.
Целью изобретения является упрощение процесса определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории и расширения функциональных возможностей путем обеспечения определения геодезических координат глубины погружения приемоизлучающей антенны эхолота в процессе определения данных поправок, а следовательно, обеспечения создания на акватории съемки рельефа дна опорных гидрографических пунктов для калибровки эхолота на акватории съемки с целью обеспечения единства измерений.
Указанная цель достигается тем, что заявленном способе определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, включающем погружение до заданного горизонта или до поверхности дна акватории в заданном месте (местах) акватории приемоизлучающей гидроакустической антенны однолучевого эхолота, расположенной на нижнем конце базы известной длины, закрепленной в кардановом подвесе с возможностью погружения и подъема ее по вертикали и излучения по вертикали гидроакустических сигналов до поверхности воды акватории и приема отраженных данных сигналов от поверхности воды акватории данной антенной, измерения глубины погружения указанной антенны гидроакустическим путем iZэi определения искомых глубин  , искомых поправок
, искомых поправок  к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, расчетным путем, фиксируют в моменты погружения и всплытия верхнего конца базы «в» глубины погружения Zэi приемоизлучающей гидроакустической антенны, измеренную гидроакустическим путем, длину базы «b» принимают за истинную опорную глубину, по измеренным значениям глубин Zэi погружения приемоизлучающей гидроакустической антенны определяют приращения ΔZэi между смежными глубинами
к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, расчетным путем, фиксируют в моменты погружения и всплытия верхнего конца базы «в» глубины погружения Zэi приемоизлучающей гидроакустической антенны, измеренную гидроакустическим путем, длину базы «b» принимают за истинную опорную глубину, по измеренным значениям глубин Zэi погружения приемоизлучающей гидроакустической антенны определяют приращения ΔZэi между смежными глубинами  и
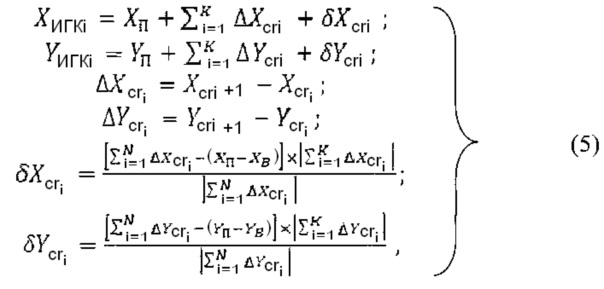
и  , определяют геодезические координаты мест погружения Хп, Yп и всплытия Хв, Yв базы, а также счислимые геодезические координаты
, определяют геодезические координаты мест погружения Хп, Yп и всплытия Хв, Yв базы, а также счислимые геодезические координаты  ,
,  места нахождения данной антенны в течение времени погружения ее до заданного горизонта или до поверхности воды акватории верхнего конца базы «b», по полученным данным определяют искомые поправки ΔZэi к глубинам Zэi, и искомые их геодезические координаты Xигк, Yигк по следующим формульным зависимостям:
места нахождения данной антенны в течение времени погружения ее до заданного горизонта или до поверхности воды акватории верхнего конца базы «b», по полученным данным определяют искомые поправки ΔZэi к глубинам Zэi, и искомые их геодезические координаты Xигк, Yигк по следующим формульным зависимостям:
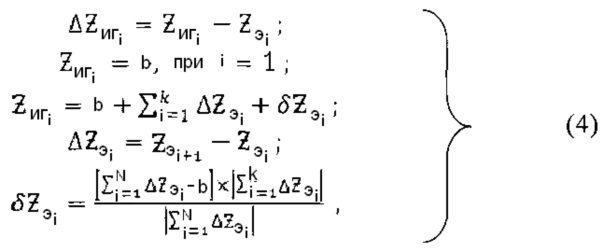
где i=1, 2, 3…K…N;
K и N - количество приращений  ,
,  ,
,  определенных от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды акватории соответственно;
определенных от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды акватории соответственно;
 ,
,  ,
,  - поправки к искомым глубинам
- поправки к искомым глубинам  и к искомым геодезическим координатам
и к искомым геодезическим координатам  ,
,  соответственно в случае образования невязок
соответственно в случае образования невязок
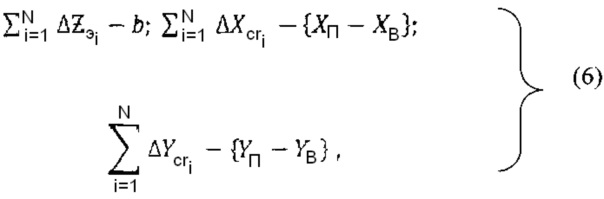
при достижении верхним концом базы «b» поверхности воды акватории.
Указанная цель достигается так же тем, что в заявленном устройстве для осуществления заявленного способа, содержащем базу, известной длины, закрепленную по вертикали на стабилизированной в горизонте платформе, например, в кардановом подвесе, положительную плавучесть, выполненную, например, в виде герметической емкости, закрепленной в верхней части базы, и отрицательную плавучесть, выполненную, например, в виде металлического груза, закрепленного в нижней части базы, приемоизлучающую гидроакустическую антенну однолучевого эхолота, закрепленную на нижнем конце базы с возможностью излучения гидроакустических сигналов по вертикали вверх до поверхности воды, и приема отраженных поверхностью воды данных сигналов, блок управления, передатчик и измерительный приемный блок, выход передатчика соединен через блок управления с входом приемоизлучающей гидроакустической антенны, выход которой соединен через блок управления с входом измерительного приемного блока, реле, воспринимающие и исполняющие контакты которого закреплены на верхнем конце базы, соединенное с блоком управления, вычислительный блок определения поправок к глубинам, измеренным эхолотом, регистратор, при этом вход вычислительного блока определения поправок к глубинам, измеренным эхолотом, соединен через блок управления с выходом измерительного приемного блока, а выход - с входом регистратора.
Заявленное устройство снабжено вычислительным блоком определения искомых глубин  , реализующим соответствующие формульные зависимости, изложенные в (4), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход - с входом блока определения поправок к глубинам
, реализующим соответствующие формульные зависимости, изложенные в (4), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход - с входом блока определения поправок к глубинам  , измеренным эхолотом, приемником спутниковой радионавигационной системы типа GPS или «Глонасс», антенна которого закреплена на верхнем конце базы, морской интегрированной малогабаритной навигационной системой типа «Кама», разработанной Пермской научно-производственной компанией, закрепленной в кардановом подвесе, вычислительным блоком определения истинных геодезических координат мест измерения глубин
, измеренным эхолотом, приемником спутниковой радионавигационной системы типа GPS или «Глонасс», антенна которого закреплена на верхнем конце базы, морской интегрированной малогабаритной навигационной системой типа «Кама», разработанной Пермской научно-производственной компанией, закрепленной в кардановом подвесе, вычислительным блоком определения истинных геодезических координат мест измерения глубин  , заявленным устройством
, заявленным устройством  ,
,  , реализующим формульные зависимости, изложенный в пункте 1 формулы изобретения, вход которого соединен через блок управления с выходом приемника спутниковой радионавигационной системы и морской интегрированной малогабаритной навигационной системой, а выход - с входом регистратора.
, реализующим формульные зависимости, изложенный в пункте 1 формулы изобретения, вход которого соединен через блок управления с выходом приемника спутниковой радионавигационной системы и морской интегрированной малогабаритной навигационной системой, а выход - с входом регистратора.
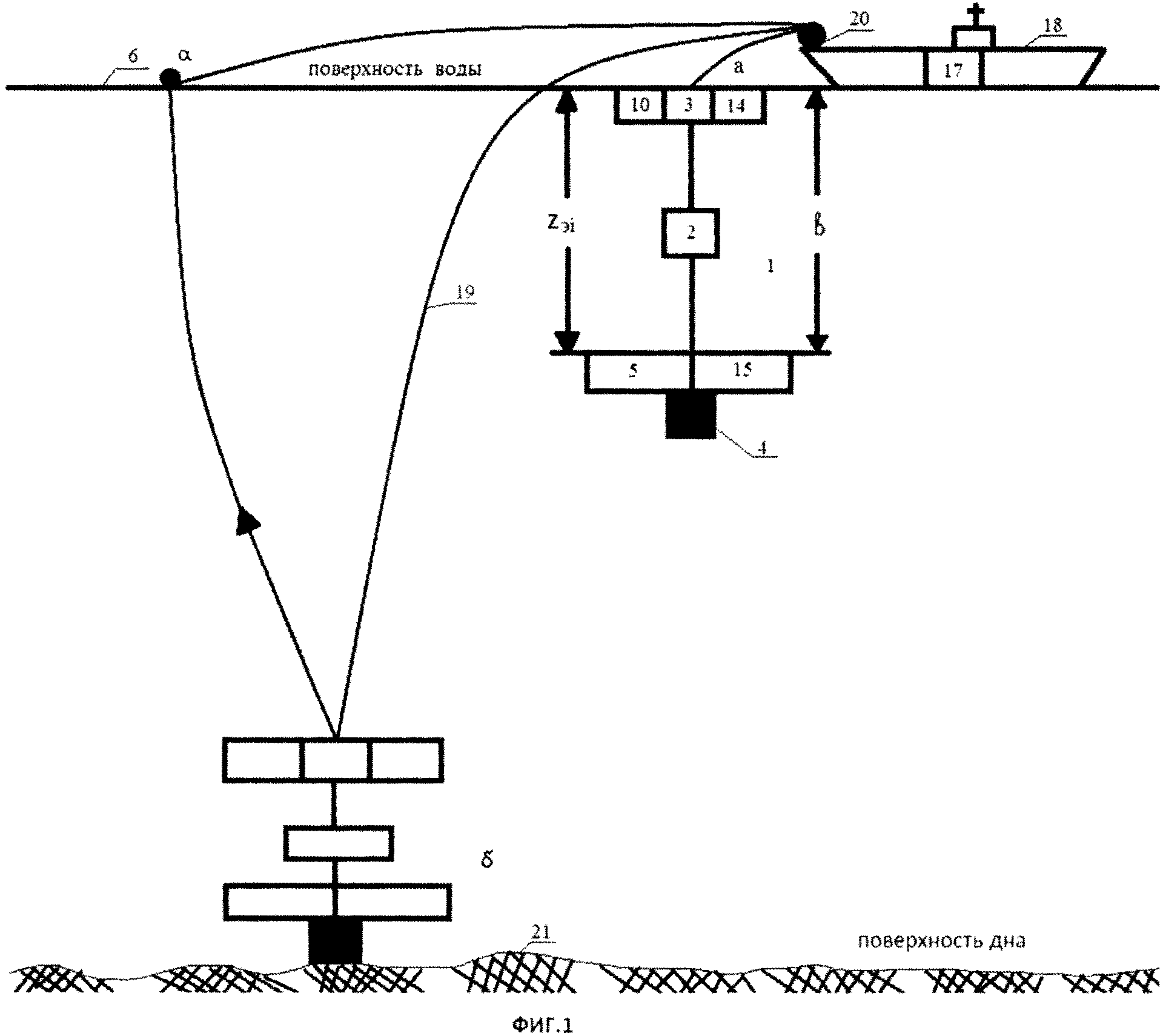
Техническая реализация заявленного изобретения поясняется чертежами (фиг. 1, 2):
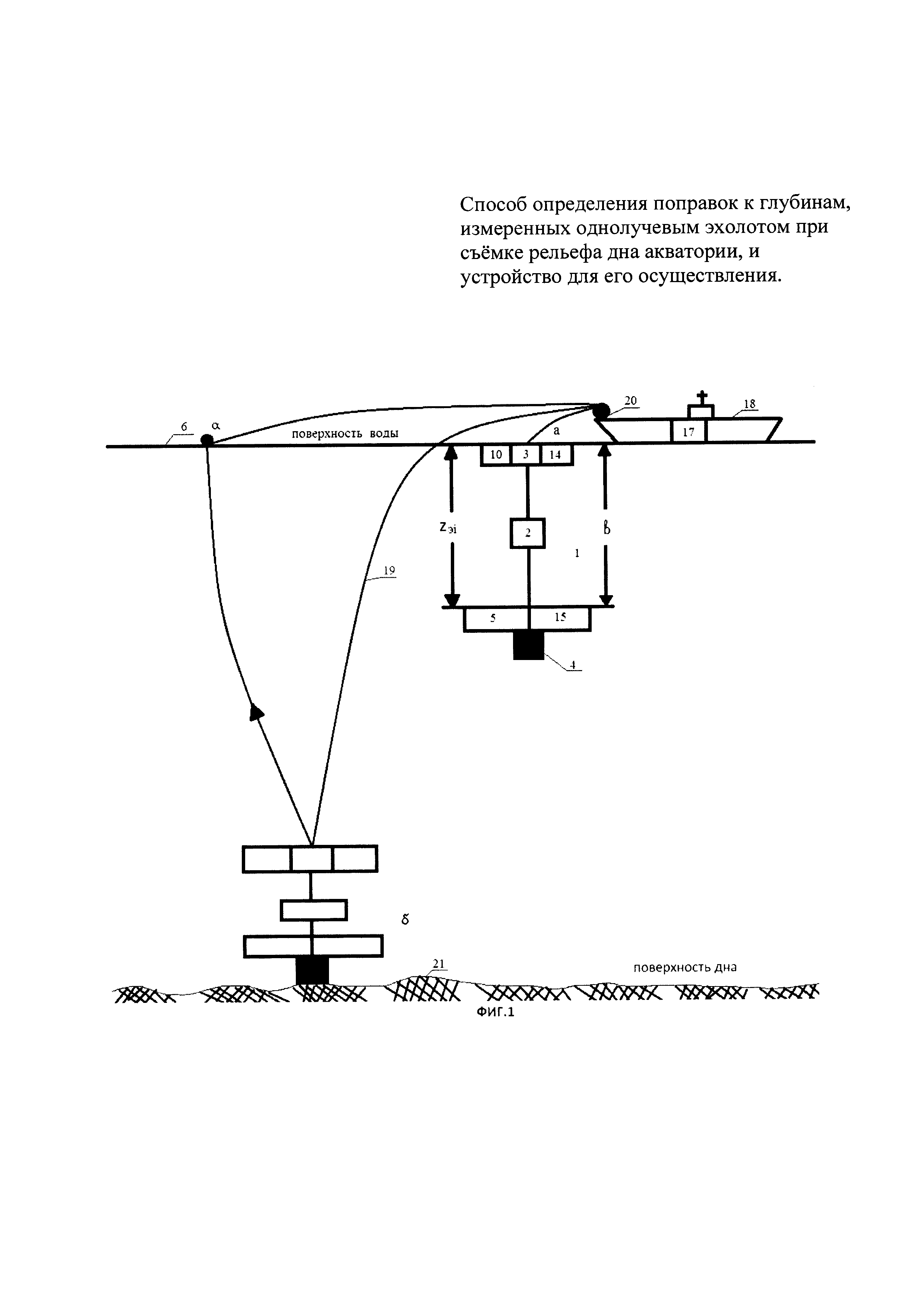
Фиг. 1 - схематическое изображение заявленного способа определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории.
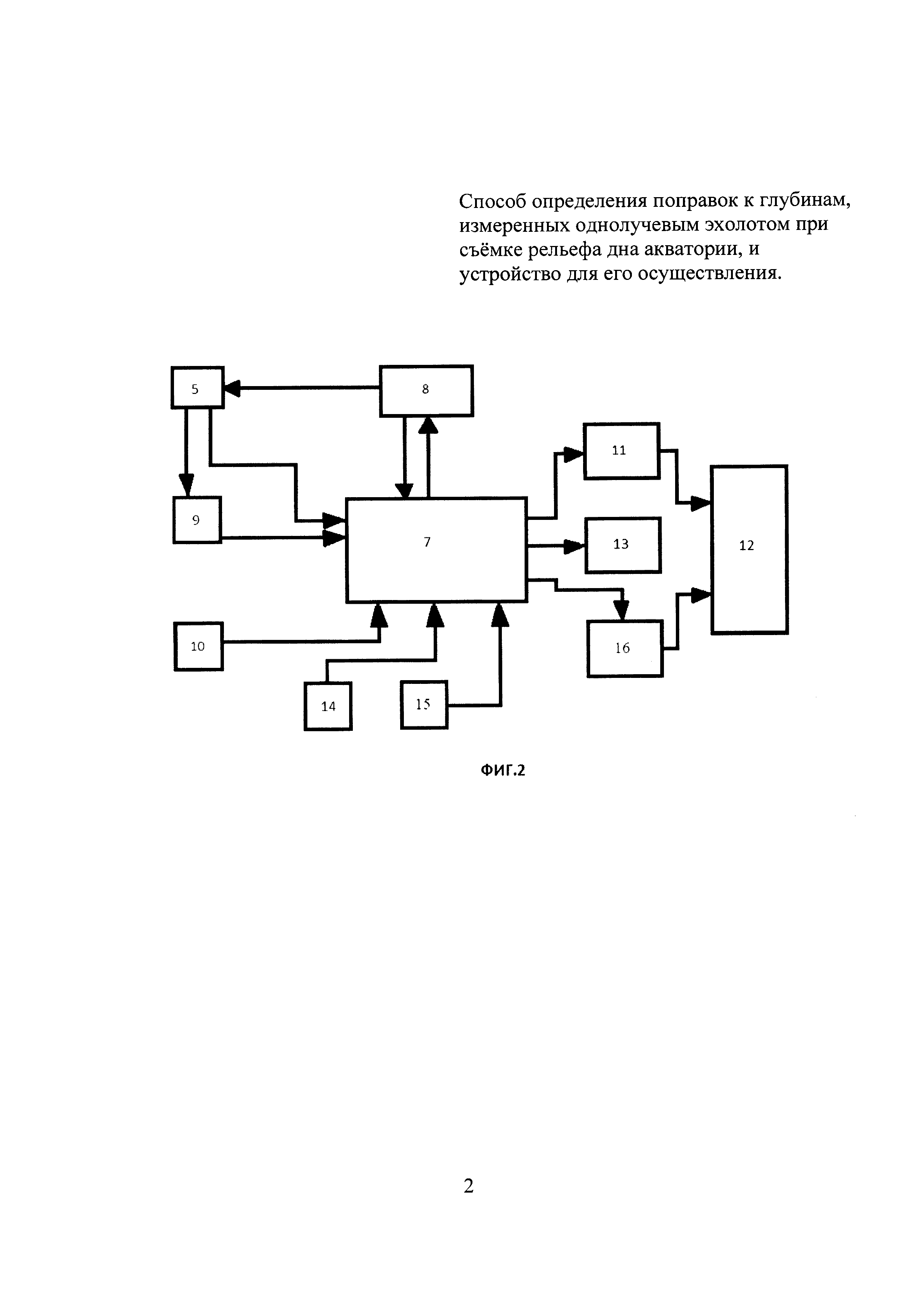
Фиг.2 - структурная схема заявленного устройства.
Погружаемая забортная часть заявленного устройства (фиг. 1) включает: вертикальную базу 1, закрепленную в кардановом подвесе 2, положительную плавучесть 3, например, в виде полой герметичной емкости, закрепленной в верхней части базы 1 и отрицательную плавучесть 4, например, в виде металлического груза, закрепленного в нижней части базы 1, приемоизлучающую гидроакустическую антенну 5, закрепленную на нижнем конце базы 1, с возможностью излучения гидроакустического сигнала по вертикали вверх до поверхности воды 6 и приема отраженного поверхностью воды 6 сигнала. На верхнем конце базы 1 закреплены воспринимающие контакты реле 10, исполняющие контакты которого соединены с блоком управления 7, размещаемого на судне 18.
Заявленное устройство снабжено приемником спутниковой радионавигационной системы 14 типа GPS или «ГЛОНАСС», антенна которого закреплена на верхнем конце базы 1, морской интегрированной малогабаритной навигационной системой 15, закрепленной в кардановом подвесе 2, вычислительным блоком 15 определения истинных геодезических координат мест измерения глубин заявленным устройством, вход которого соединен через блок управления 7 с выходом приемника спутниковой радионавигационной системы 14 и морской интегрированной малогабаритной навигационной системой 15, а выход - с входом регистратора 12, размещаемого на судне 18.
На фиг. 1 показано положение погружаемой части тарирующего устройства относительно поверхности воды:
а) в начале и в конце тарирования;
б) на заданном горизонте тарирования.
Погружаемая заборная часть заявленного устройства за кардановый подвес 2 присоединена к кабель-тросу 19 судового спуско-подъемного устройства 20.
Судовой эхолот 17, блок управления 7, передатчик 8, регистратор 12, вычислительный блок 11 определения поправок к глубинам измеренных эхолотом, вычислительный блок 16 определения истинных геодезических координат мест измерения глубин погружения являются составными частями заявленного устройства (фиг. 2) и размещаются на судне 18.
Передатчик 8, измерительный приемный блок 9 являются составными частями тарирующего судового эхолота 17, при этом выход передатчика 8 соединен через блок управления 7 с входом приемоизлучающей гидроакустической антенны 5, выход которой соединен с входом измерительного приемного блока 9.
Вычислительный блок 11 определения поправок к глубинам, измеренным эхолотом, регистратор 12, вход вычислительного блока 11 соединен через блок управления с выходом измерительного приемного блока 9, а выход - с входом регистратора 12 с вычислительным блоком 13 определения искомых глубин  , регистрирующие зависимости, изложенные в блоке формул (4), вход которого через блок управления 7 соединен с выходом измерительного приемного блока 9, а выход - с входом вычислительного блока 11 определения поправок к глубинам
, регистрирующие зависимости, изложенные в блоке формул (4), вход которого через блок управления 7 соединен с выходом измерительного приемного блока 9, а выход - с входом вычислительного блока 11 определения поправок к глубинам  , измеренным эхолотом.
, измеренным эхолотом.
Приемоизлучающая гидроакустическая антенна 5 может быть реализована на основе композитных материалов, используемых для создания приемоизлучающих гидроакустических антенн современных эхолотов.
Блок управления 7 может быть реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразования сигналов от нескольких датчиков, например, микропроцессоров семейства AVR фирмы АТМЕС. Вычислительный блок 11, вычислительный блок 13 и вычислительный блок 16 могут быть реализованы, например, на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением.
Реализация заявленного способа определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, заявленным устройством осуществляется следующим образом.
Перед съемкой рельефа дна на акватории выбирают места для выполнения тарирования эхолота, в которых судно 18 устанавливают на якорь или оставляют в дрейфе.
Заборная часть заявляемого устройства с помощью судового спуско-подъемного устройства 20 на кабель-тросе 19 спускают за борт в воду. Вследствие размещения базы 1 в кардановом подвесе 2 сначала под действием тяжести, а при погружении в воду всей заборной части момента сил (подъемной силы и силы тяжести) база 1 примет вертикальное положение и будет сохранять его с достаточной точностью во время погружения до максимального горизонта тарирования и до поверхности дна 21 и подъема до поверхности воды 6.
При погружении заборной части заявляемого устройства в воду момент соприкосновения с водой фиксируют воспринимающие контакты реле 10 на верхнем конце базы 1, а исполнительные контакты реле 10 замыкают в блоке управления 7 электрические цепи формирования управляющих импульсов запуска передатчика 8, приемоизлучающая гидроакустическая антенна 5 начинает излучение гидроакустических сигналов вертикально вверх до поверхности воды 6 акватории и прием отраженных от поверхности воды 6 акватории сигналов на нижнем конце базы 1, а также преобразование их в электрические сигналы, поступающие на вход измерительного приемного блока 9, в котором вырабатываются сигналы, соответствующие глубине  погружения заборной части заявляемого устройства и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления 7 поступают в вычислительный блок 11 определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок 13 определения искомых глубин
погружения заборной части заявляемого устройства и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления 7 поступают в вычислительный блок 11 определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок 13 определения искомых глубин  . Вычисленные искомые глубины
. Вычисленные искомые глубины  , поступают на вход вычислительного блока 11. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (4).
, поступают на вход вычислительного блока 11. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (4).
В моменты погружения и всплытия воспринимающих контактов реле 10, расположенных на верхнем конце базы 1, по командным импульсам, выработанным блоком управления 7, электрические сигналы, пропорциональные геодезическим координатам места погружения Хп, Yп и всплытия Хв, Yв, измеренные приемником спутниковой радионавигационной системы 13, а также в течение всего времени погружения и всплытия заборной части заявляемого устройства по командным импульсом, выработанным блоком управления 7, электрические сигналы, пропорциональные счислимым геодезическим координатам  ,
,  , поступают на вход вычислительного блока 16 определения истинных геодезических координат мест измерения глубин погружения заявленным устройством.
, поступают на вход вычислительного блока 16 определения истинных геодезических координат мест измерения глубин погружения заявленным устройством.
Вычисление данных истинных геодезических координат  ,
,  производится в вычислительном блоке 16 по алгоритму, составленному соответствующим формулам (5).
производится в вычислительном блоке 16 по алгоритму, составленному соответствующим формулам (5).
Вычисленные значения поправок ΔZиэ к глубинам, измеренным эхолотом при съемке рельефа дна акватории, истинные значения глубин  координат ,
координат ,  мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор 12.
мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор 12.
Работа заявленного устройства в режиме измерений глубины его погружения продолжается вплоть до момента, когда верхний конец базы 1 достигнет поверхности воды 6, где при его выходе из воды происходит размыкание контактов реле 10, и размыкание цепей передатчика 8, и прекращение излучения и приема гидроакустических сигналов.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известны способ и устройство определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, и истинных геодезических координат мест определения, включающие погружение на вертикально удерживаемой базе до заданного горизонта тарирования, а затем подъем на поверхность акватории расположенной на нижнем конце этой базы приемоизлучающей гидроакустической антенны с возможностью излучения гидроакустического сигнала по вертикали вверх до поверхности воды и прием отраженного сигнала поверхности воды, морскую интегрированную малогабаритную навигационную систему, приемник спутниковой радионавигационной системы, антенна которого закреплена на верхнем конце базы, реле, воспринимающие контакты которого расположены на верхнем конце базы, определения искомых значений поправок тарирования эхолота  по другим формульным зависимостям, истинных геодезических координат мест определения данных поправок по новым формульным зависимостям.
по другим формульным зависимостям, истинных геодезических координат мест определения данных поправок по новым формульным зависимостям.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления современных морских приборов и технических средств.
Оценку точности определения истинных поправок  к глубинам, измеренным эхолотом при съемке рельефа дна акватории, и истинных геодезических координат , , мест их определения можно произвести следующим образом.
к глубинам, измеренным эхолотом при съемке рельефа дна акватории, и истинных геодезических координат , , мест их определения можно произвести следующим образом.
Анализ формул (4) позволяет заключить, что если принять гипотезу, что под знаком Σ суммы в правых их частях не отягощены постоянными и систематическими составляющими погрешностей, поскольку в приращениях данные погрешности практически исключаются, а случайные инструментальные погрешности незначительны по величине у современных цифровых эхолотов и имеют разные знаки, то при большом количестве поправок и истинных геодезических координат случайные погрешности под знаком суммы будут стремиться к нулю. Следовательно, погрешность определения данных поправок будет практически равна погрешности инструментальных измерений определения глубины эхолотом, которая у современных промерных однолучевых цифровых эхолотов составляет 0,03-0,4% (см., например, Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September. - p. 44-51 [5]), а погрешность определения данных истинных , геодезических координат будет практически равна погрешности определения геодезических координат приемником спутниковой радионавигационной системы типа GPS-15, которая составляет 0,2 м (см., например, Ole Orpen, (Fugro Seastar) ocuol Strin Asheim, (Fugro Suzvoy) Hyolro International v6, №10, 2002, - p. 30-33 [6]).
Допустимая погрешность определения глубин  и ее геодезических координат X, Y в соответствии с требованиями по точности стандарта международной гидрографической организации не должна превышать значений Z=0,7 м на глубине 100 метров и Z=3,5 м на глубине 200 метров X=Y=11 м (см., например, IHO Stanolarols for Hydrographis Surveys // Special Publication, - 1997, - №44, - 23 p. [7]).
и ее геодезических координат X, Y в соответствии с требованиями по точности стандарта международной гидрографической организации не должна превышать значений Z=0,7 м на глубине 100 метров и Z=3,5 м на глубине 200 метров X=Y=11 м (см., например, IHO Stanolarols for Hydrographis Surveys // Special Publication, - 1997, - №44, - 23 p. [7]).
Таким образом, заявленные способ и устройство обеспечивают определения данных искомых поправок и геодезических координат более чем на порядок точнее требуемой точности.
Тактико-экономическая эффективность заявленных способа и устройства определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, заключается в том, что при их использовании значительно упрощается процесс определения данных поправок за счет того, что отсутствует необходимость в применении двух датчиков гидростатического давления и двух датчиков температуры воды для определения поправок  а, следовательно, отсутствует необходимость в калибровки данных датчиков с целью определения деления измерительных шкал и определения ухода нуля их отсчета, для чего необходимо на съемочном судне иметь метрологическую лабораторию со специальной метрологической аппаратурой.
а, следовательно, отсутствует необходимость в калибровки данных датчиков с целью определения деления измерительных шкал и определения ухода нуля их отсчета, для чего необходимо на съемочном судне иметь метрологическую лабораторию со специальной метрологической аппаратурой.
Отсутствует необходимость в обеспечении синхронного измерения данных датчиков, для чего необходимо иметь четырехканальный измерительный блок со специальным блоком управления.
Кроме того, в заявленных способе и устройстве обеспечивается расширение функциональных возможностей путем обеспечения определения геодезических координат мест измерения приемоизлучающей антенны в процессе определения данных поправок, а следовательно, обеспечивается возможность создания рельефа дна опорных гидрографических пунктов для калибровки эхолотов с целью обеспечения единства измерений.
Источники информации
1. «Инструкция по промеру». – Л.: издание Управления гидрографической службы ВМФ, 1964 г., - сс. 109-111.
2. Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September.
3. Авторское свидетельство SU №913814 от 16 ноября 1981 г.
4. Патент RU №2292062 от 20 января 2007 г.
5. Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September. - p. 44-51.
6. Ole Orpen, (Fugro Seastar) ocuol Strin Asheim, (Fugro Suzvoy) Hyolro International v6, №10, 2002, - p. 30-33 [6].
7. IHO Stanolarols for Hydrographis Surveys // Special Publication, - 1997, - №44, - 23 p.


























Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ стереосъемки рельефа дна акватории и устройство для его осуществления
Фазовый гидролокатор бокового обзора
Способ съемки рельефа дна акватории и устройство для съемки рельефа дна акватории
Способ определения глубин в реальном масштабе времени при обследовании рельефа дна гидролокатором бокового обзора
Способ геохимической разведки
Система для освещения подводной обстановки
Заякоренная профилирующая подводная обсерватория
Спасательный экраноплан
Способ обустройства морских глубоководных нефтегазовых месторождений
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ стереосъемки рельефа дна акватории и устройство для его осуществления
Фазовый гидролокатор бокового обзора
Способ съемки рельефа дна акватории и устройство для съемки рельефа дна акватории
Способ определения глубин в реальном масштабе времени при обследовании рельефа дна гидролокатором бокового обзора
Способ геохимической разведки
Система для освещения подводной обстановки
Заякоренная профилирующая подводная обсерватория
Спасательный экраноплан
Способ обустройства морских глубоководных нефтегазовых месторождений

