Результат интеллектуальной деятельности: Аппарат на воздушной подушке с наземным движителем
Вид РИД
Изобретение
Изобретение относится к транспорту, а именно к аппаратам на воздушной подушке с наземным движителем.
Из уровня техники известны аппараты на воздушной подушке с наземным движителем. Так, в патенте США US4063611 (А), МПК B60V 1/00; B60V 1/04; B60V 1/11; B60V 3/02, дата публикации 20.12.1977 [1] представлен аппарат на воздушной подушке, содержащий корпус, гибкое ограждение воздушной подушки, снабженное воздуховодом, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем и, по меньшей мере, с одним нагнетателем для создания воздушной подушки, а также шасси, содержащее наземный движитель и выполненное с возможностью изменения степени разгрузки.
Недостатком известного из [1] аппарата на воздушной подушке с наземным движителем является отсутствие системы управления степенью разгрузки воздушной подушки наземным движителем.
Аппарат на воздушной подушке с наземным движителем по патенту США [1] принят в качестве наиболее близкого аналога.
Решаемой технической задачей является обеспечение автоматического регулирования степени разгрузки воздушной подушки наземным движителем.
Технический результат заключается в снижении потерь энергии на буксование наземного шасси.
Сущность изобретения состоит в следующем.
Аппарат на воздушной подушке, как и в наиболее близком аналоге [1], содержит корпус, гибкое ограждение воздушной подушки, снабженное воздуховодом, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем и, по меньшей мере, с одним нагнетателем для создания воздушной подушки, и шасси, содержащее наземный движитель и выполненное с возможностью изменения степени разгрузки, но в отличие от наиболее близкого аналога [1] шасси оснащено датчиками ускорения, степени разгрузки наземного движителя и тяги, нагнетатель оснащен устройством измерения его рабочих параметров, датчики наземного движителя и нагнетателя соединены с соответствующими преобразовательно-усилительными блоками, которые соединены с блоком сравнения, соединенным через блок усилителя сигнала с исполнительным устройством изменения взаимного положения наземного движителя и нижних кромок гибкого ограждения воздушной подушки по высоте корпуса, при этом наземный движитель содержит, по меньшей мере, пару пассивных колес, на каждом из которых установлены датчики кинематических параметров движения, наземные движители оснащены датчиками частоты вращения, крутящего момента, вертикальной нагрузки, датчики кинематических параметров пассивных колес и датчики наземного движителя посредством соответствующих усилительных блоков соединены с вычислителем, формирующим сигнал на пульт управления аппаратом на воздушной подушке.
Аппарат на воздушной подушке характеризуется тем, что шасси с наземным движителем выполнено в виде колесного шасси.
Аппарат на воздушной подушке характеризуется тем, что нагнетатель содержит вентилятор с осевым рабочим колесом.
Аппарат на воздушной подушке характеризуется тем, что по показаниям датчиков пассивных колес и датчиков наземного движителя в вычислителе определены удельная потеря энергии при качении на единицу пройденного колесом пути при единичной вертикальной нагрузке, удельная свободная тяга, равная продольной силе, приложенной к оси катящегося колеса, при единичной вертикальной нагрузке на его ось, и коэффициент буксования, равный отношению пройденного пути пассивными колесами и наземным движителем, которые сопоставлены с соответствующими показаниями эталонной модели, и по результатам сравнения сформирован сигнал на пульт управления аппаратом на воздушной подушке.
Представленные признаки образуют совокупность и являются существенными для достижения технического результата.
Действительно, выполнение аппарата на воздушной подушке, содержащего корпус, гибкое ограждение воздушной подушки, снабженное воздуховодом, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем и, по меньшей мере, с одним нагнетателем для создания воздушной подушки, а также шасси, содержащее наземный движитель и выполненное с возможностью изменения степени разгрузки, оснащение шасси датчиками ускорения, степени разгрузки наземного движителя и тяги, оснащение нагнетателя устройством измерения его рабочих параметров, соединение датчиков наземного движителя и датчиков нагнетателя с соответствующими преобразовательно-усилительными блоками, которые соединены с блоком сравнения, связанного через блок усилителя сигнала с исполнительным устройством для изменения взаимного положения наземного движителя и нижних кромок гибкого ограждения воздушной подушки по высоте корпуса, выполнение наземного движителя содержащим, по меньшей мере, пару пассивных колес, на каждом из которых установлены датчики кинематических параметров движения, оснащение наземных движителей датчиками частоты вращения, крутящего момента, вертикальной нагрузки, соединение датчиков кинематических параметров пассивных колес и датчиков наземного движителя посредством соответствующих усилительных блоков с вычислителем, формирующим сигнал на пульт управления аппаратом на воздушной подушке, обеспечивает возможность регулирования нагрузки на шасси с наземным движителем, и воздушного зазора между краем юбки воздушной подушки и поверхностью, обеспечивает недопущение буксования наземных движителей и, следовательно, снижение потерь энергии на буксование наземного шасси.
Выполнение шасси с наземным движителем в виде колесного шасси обеспечивает снижение потерь энергии на буксование в связи с более точным регулированием разгрузки воздушной подушки колесным шасси.
Выполнение нагнетателя содержащим вентилятор с осевым рабочим колесом позволяет более точно регулировать напор воздушного потока и, тем самым, нагрузку на воздушную подушку, что также способствует уменьшению потерь энергии на буксование.
Выполнение аппарата на воздушной подушке с возможностью определения в вычислителе по показаниям датчиков пассивных колес и датчиков наземного движителя в вычислителе удельных потерь энергии при качении на единицу пройденного колесом пути при единичной вертикальной нагрузке, удельной свободной тяги, равной продольной силе, приложенной к оси катящегося колеса, при единичной вертикальной нагрузке на его ось, и коэффициента буксования, равного отношению пройденного пути пассивными колесами и наземным движителем, сопоставление полученных результатов с соответствующими показаниями эталонной модели и по результатам сравнения формирование сигнала на пульт управления аппаратом на воздушной подушке обеспечивает регулирование разгрузки воздушной подушки наземным движителем, что позволяет уменьшить потери энергии на буксование наземного движителя.
Изобретение поясняется чертежами.
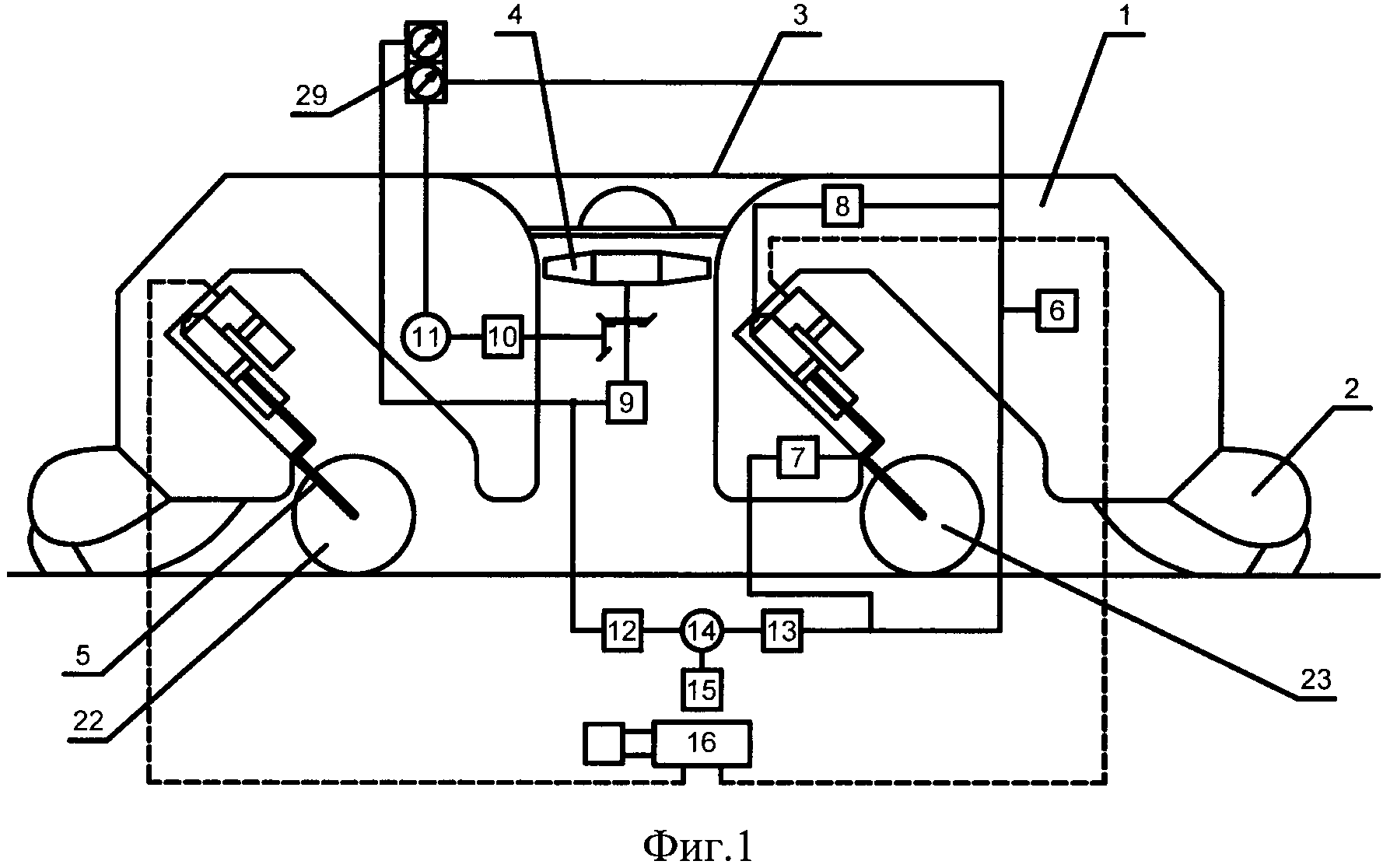
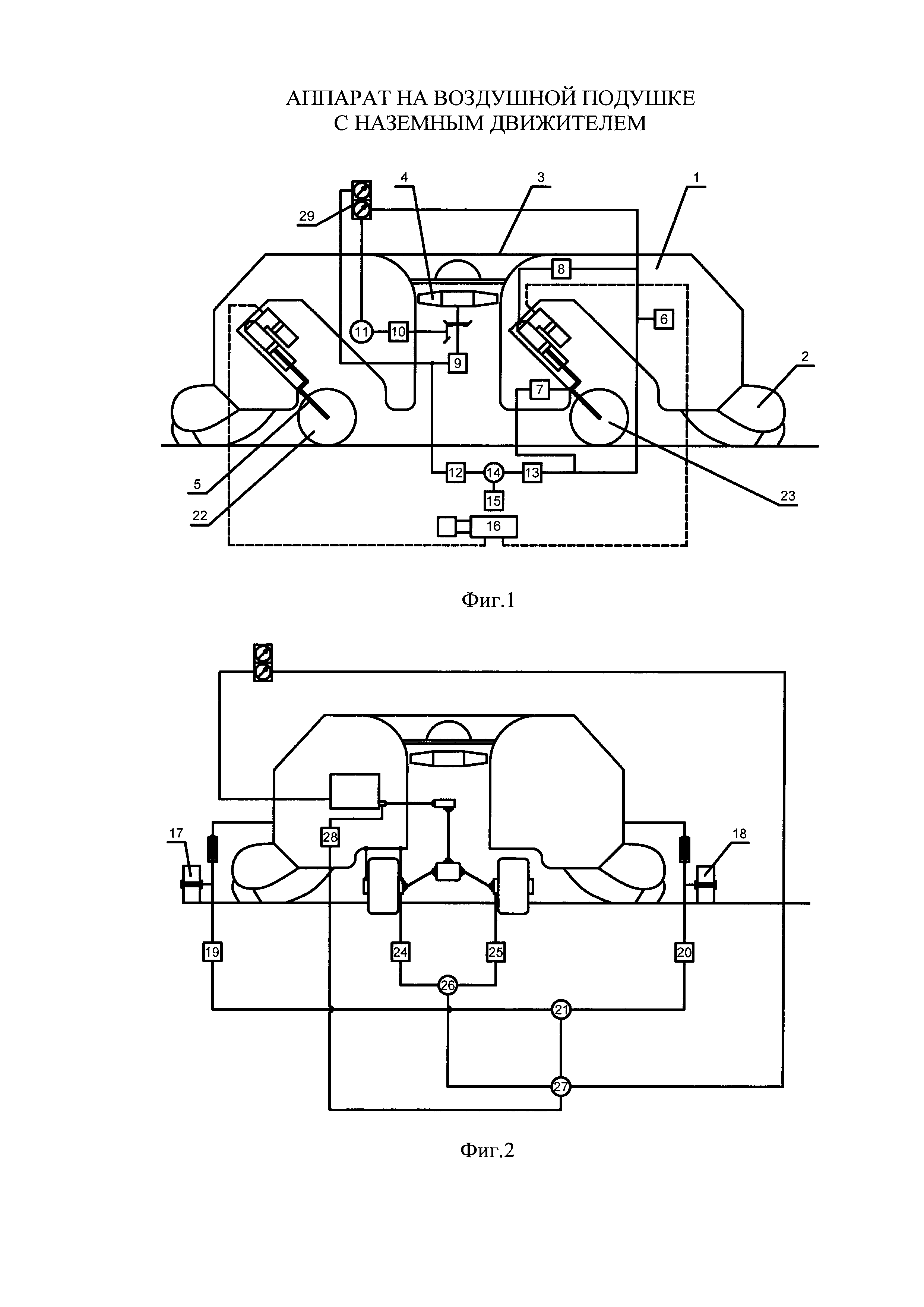
На фиг. 1 представлена блок-схема управления разгрузкой воздушной подушки наземным движителем аппарата на воздушной подушке.
На фиг. 2 показана блок-схема регулирования разгрузки шасси с наземным движителем.
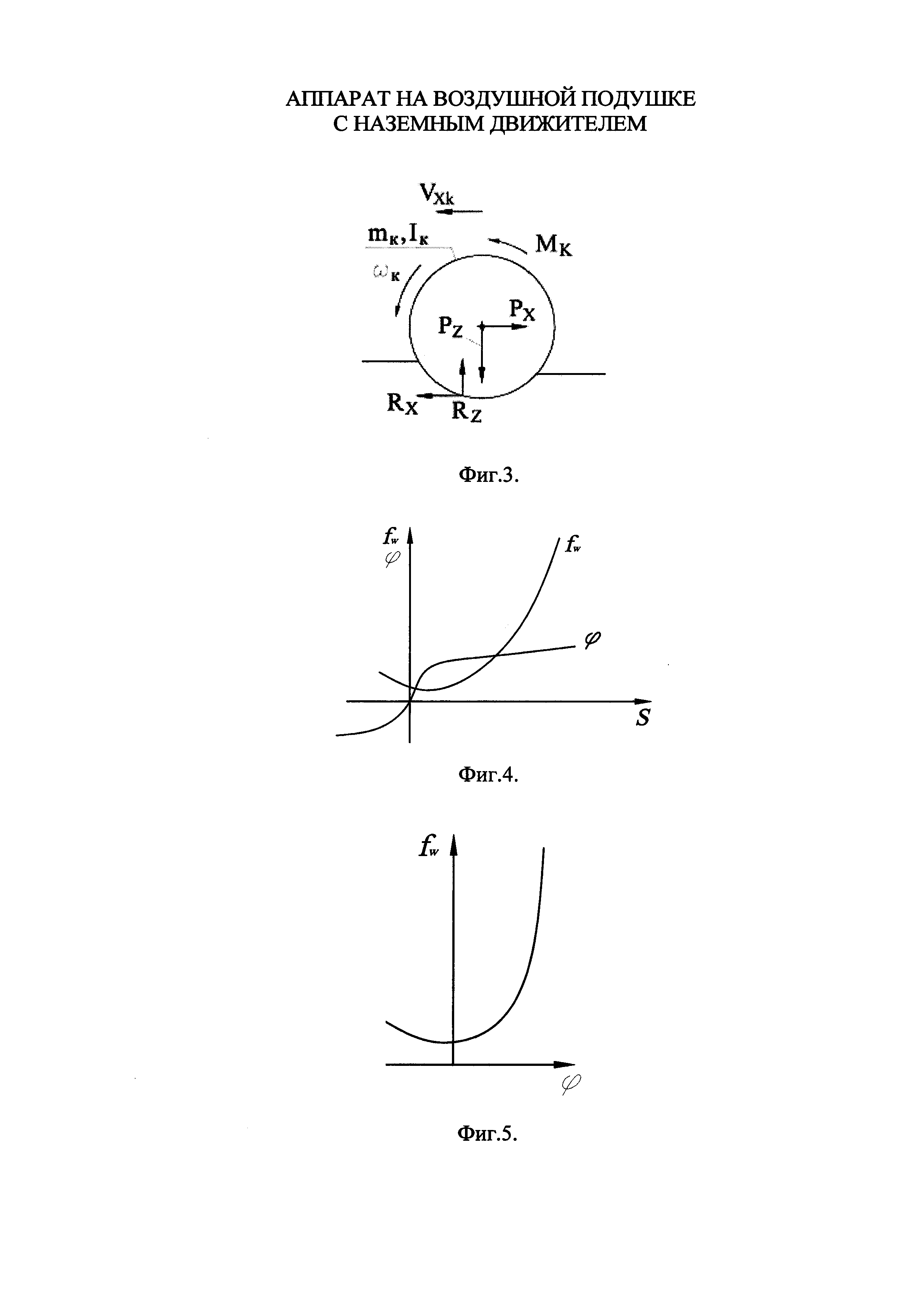
На фиг. 3 показана схема сил и моментов, действующих на колесо наземного движителя.
На фиг. 4 показан пример экспериментального графика зависимости удельной потери энергии  и удельной свободной тяги ϕ от коэффициента буксования S.
и удельной свободной тяги ϕ от коэффициента буксования S.
На фиг. 5 показан пример экспериментального графика зависимости удельной потери энергии от удельной свободной тяги ϕ.
Аппарат на воздушной подушке с наземным движителем устроен следующим образом.
Аппарат на воздушной подушке (далее - АВП), как показано на фиг. 1, содержит корпус 1, гибкое ограждение 2 камеры воздушной подушки, снабженной воздуховодом 3, расположенным в центре корпуса 1, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги (на фиг. не показано) и, по меньшей мере, с одним нагнетателем 4 для создания воздушной подушки, а также шасси с регулируемым наземным движителем, например колесное шасси 5 для разгрузки АВП.
Конструкция колесного шасси 5 позволяет изменять степень разгрузки АВП. Колесное шасси 5 оснащено набором датчиков, таких как датчик перегрузки 6 (например, акселерометр), датчик 7 степени разгрузки механического движителя, датчик 8 тяги колесного шасси 5. Нагнетатель 4, выполненный, например, в виде вентилятора с осевым рабочим колесом, содержит устройство 9 измерения рабочих параметров вентилятора. Силовой привод вращения вентилятора осуществляется посредством двигателя 10, который соединен с блоком управления 11, осуществляющего контроль рабочих параметров двигателя 10.
Информация с датчиков 6, 7, 8 регулируемого колесного шасси 5 и устройства 9 измерения рабочих параметров вентилятора нагнетателя 4 поступает в соответствующие преобразовательно-усилительные блоки 12, 13, после чего передается в блок сравнения 14, далее управляющий сигнал подается на усилитель сигнала 15 и в исполнительное устройство 16 для изменения взаимного положения колесного шасси 5 наземного движителя и нижних кромок гибкого ограждения 2 воздушной подушки по высоте корпуса 1.
Для регулирования разгрузки шасси с наземным движителем, например колесного шасси 5, как показано на фиг. 2, определяются кинематические параметры движения и положение опорной поверхности относительно АВП посредством вспомогательных пассивных колес 17 и 18, оснащенных набором датчиков 19 и 20, результаты замеров подаются в усилительный блок 21. Необходимость установки двух комплектов пассивных колес 17 и 18, оснащенных набором датчиков 19 и 20, объясняется тем, что АВП может осуществлять криволинейное движение, и, в этом случае система управления приводами колес шасси с наземным движителем, например, ведущими колесами 22, 23, теряет адекватность.
Необходимость определения положения опорной поверхности относительно АВП объясняется необходимостью контролировать глубину колеи, оставляемой ведущими колесами 22, 23.
Частота вращения, крутящий момент, продольная и вертикальная нагрузки на ведущих колесах 22, 23 шасси с наземным движителем замеряются посредством комплекта датчиков 24 и 25, результаты замеров подаются в усилительный блок 26.
Информация из блоков 21 и 24 подается на бортовую вычислительную машину 27 и далее - на блок управления двигателем и трансмиссией 28. Помимо этого на бортовую вычислительную машину 27 водителем подается начальный сигнал с пульта 29 управления АВП.
АВП с наземным движителем работает следующим образом.
Для прогнозирования возможностей движителя колесного транспортного средства целесообразно использовать тягово-сцепные и тягово-энергетические характеристики для различных условий взаимодействия ведущего колеса с деформируемым опорным основанием, получаемые экспериментально в грунтовом канале или на полигоне. Схема действующих сил на ведущее колесо представлена на фиг. 3.
К характеристикам процесса прямолинейного качения ведущего колеса относятся:
- удельные потери энергии (потери энергии при качении на единицу пройденного колесом пути при единичной вертикальной нагрузке),  ;
;
- удельная свободная тяга ϕ (продольная сила, приложенная к оси катящегося колеса, при единичной вертикальной нагрузке на его ось),  ;
;
- коэффициент буксования S, 
- удельные потери энергии  , с учетом того, что
, с учетом того, что  ,:
,: 
Здесь, в соответствии со схемой на фиг. 3:
 - действительный радиус качения колеса;
- действительный радиус качения колеса;
ωк - угловая скорость вращения колеса;
rко - радиус колеса в свободном режиме качения;
Vхк - скорость центра масс колеса в продольном направлении.
Зависимости fw=f(ϕ) ϕ=f(S) (фиг. 4) и fw=f(ϕ) (фиг. 5) определяются из уравнения энергетического баланса, причем для случаев качения нескольких типов колес (жестких, упругих, гистерезисных и безгистерезисных) по деформируемому грунту уравнение имеет одинаковую структуру. Однако значения величин и ϕ с высокой степенью точности могут быть получены только экспериментальным методом.
Таким образом, выходными экспериментальными параметрами взаимодействия ведущего колеса с деформируемым грунтом в различных режимах качения являются тягово-энергетические и тягово-сцепные характеристики.
По сути, эти характеристики показывают, что подводимая к ведущему колесу энергия расходуется на совершение работы продольной силой, на потери при взаимодействии с опорным основанием и гистерезисные потери в колесе.
Движение транспортного средства высокой проходимости по несвязным грунтам характеризуется значительным буксованием ведущих колес, которое сопровождается экскавацией и бульдозерным эффектом, что приводит к большим затратами энергии.
Известно, что энергетические потери значительно возрастают с увеличением коэффициента буксования, а коэффициент удельной свободной тяги при этом растет незначительно и имеет определенное предельное значение (фиг. 4, 5).
Таким образом, движение наземных движителей, например ведущих колес 22, 23 колесного шасси 5, возможно только с определенным ограниченным значением тяги, так как с ростом буксования тяга перестает увеличиваться, и вся энергия, подводимая к колесу, тратится на преодоление увеличивающейся силы сопротивления движению.
При движении АВП с наземным движителем, например колесным шасси 5, выполненным с возможностью регулирования разгрузки воздушной подушки, как показано на фиг. 2, сигналы с комплектов датчиков 24 и 25 ведущих колес 22 и 23 подаются на усилительный блок 26, а сигналы с датчиков 19 и 20 вспомогательных пассивных колес 17 и 18 подаются на усилительный блок 21. Информация с усилительных блоков 26 и 21 передается в бортовую вычислительную машину 27. При этом по показаниям сигналов комплектов датчиков 24 и 25 ведущих колес 22 и 23 и сигналов с датчиков 19 и 20 вспомогательных пассивных колес 17 и 18 в бортовой вычислительной машине 27 вычисляются удельные потери энергии (потери энергии при качении на единицу пройденного колесом пути при единичной вертикальной нагрузке),  , удельная свободная тяга
, удельная свободная тяга  , коэффициент буксования
, коэффициент буксования  , которые сравниваются с заранее определенными на эталонной модели соответствующими характеристиками, представленными, например, в виде графиков на фиг. 4, 5, и сигнал разности вычисленных и эталонных величин подается на блок 28 управления двигателем и трансмиссией шасси 5 наземного движителя. На блок 28 также приходит сигнал с пульта 29 при управлении водителем АВП.
, которые сравниваются с заранее определенными на эталонной модели соответствующими характеристиками, представленными, например, в виде графиков на фиг. 4, 5, и сигнал разности вычисленных и эталонных величин подается на блок 28 управления двигателем и трансмиссией шасси 5 наземного движителя. На блок 28 также приходит сигнал с пульта 29 при управлении водителем АВП.
Управляющее воздействие с блока 28 управления двигателем и трансмиссией колесного шасси 5 приводит к изменению кинематических параметров движения АВП, которые, как показано на фиг. 1, фиксируются датчиками соответственно перегрузки, степени разгрузки и тяги на регулируемом колесном шасси 5. Информация с датчиков 6, 7 и 8 подается на преобразовательно-усилительный блок 13 и далее - на блок 14 сравнения. Сигналы с устройства 9 измерения параметров вентилятора нагнетателя 4 после подачи на преобразовательно-усилительный блок 12 также подаются на блок 14 сравнения. В блоке 14 сравнения действительные кинематические параметры и степень разгрузки АВП с наземным движителем сравниваются с эталонной моделью, вырабатывается сигнал рассогласования, который подается на исполнительное устройство 16, которое изменяет взаимное положения регулируемого колесного шасси 5 и нижних кромок гибкого ограждения 2 воздушной подушки по высоте корпуса 1 АВП.
В результате автоматического управления регулируется степень разгрузки воздушной подушки АВП при одновременном уменьшении буксования шасси с наземным движителем, например, колесного шасси 5. Это приводит к снижению потерь энергии на буксование шасси с наземным движителем, и, следовательно, достигается заявленный технический результат.
Уровень раскрытия изобретения достаточен для разработки и изготовления аппарата на воздушной подушке с наземным движителем на специализированном предприятии. Изобретение соответствует условию патентоспособности «промышленная применимость».
ПЕРЕЧЕНЬ ПОЗИЦИЙ И ОБОЗНАЧЕНИЙ
1 - корпус;
2 - гибкое ограждение;
3 - воздуховод;
4 - нагнетатель для создания воздушной подушки;
5 - колесное регулируемое шасси;
6 - датчик перегрузки на регулируемом шасси 5;
7 - датчик степени разгрузки наземного движителя;
8 - датчик тяги колесного шасси 5;
9 - устройство измерения рабочих параметров вентилятора нагнетателя 4;
10 - двигатель силового привода вращения вентилятора нагнетателя 4;
11 - блок управления, осуществляющего контроль рабочих параметров двигателя 10;
12 - преобразовательно-усилительные блок сигналов с устройства 9 измерения рабочих параметров вентилятора нагнетателя 4;
13 - преобразовательно-усилительные блок сигналов с датчиков 6, 7, 8 регулируемого шасси 5;
14 - блок сравнения сигналов с преобразовательно-усилительных блоков 12, 13;
15 - усилитель сигнала с блока 14;
16 - исполнительное устройство для изменения взаимного положения шасси 5 наземного движителя и нижних кромок гибкого ограждения 2 воздушной подушки по высоте корпуса 1;
17 - вспомогательное пассивное колесо;
18 - вспомогательное пассивное колесо;
19 - датчики на вспомогательном пассивном колесе 17;
20 - датчики на вспомогательном пассивном колесе 18;
21 - усилительный блок датчиков 19, 20;
22 - ведущее колесо шасси 5 с наземным движителем;
23 - ведущее колесо шасси 5 с наземным движителем;
24 - комплект датчиков частоты вращения, крутящего момента, продольной и вертикальной нагрузки на ведущих колесах 22 шасси 5 с наземным движителем;
25 - комплект датчиков частоты вращения, крутящего момента, продольной и вертикальной нагрузки на ведущих колесах 23 шасси 5 с наземным движителем;
26 - усилительный блок сигналов с комплектов датчиков 24 и 25;
27 - бортовая вычислительная машина;
28 - блок управления двигателем и трансмиссией шасси 5 наземного движителя;
29 - пульт управления аппаратом на воздушной подушке
Универсальная специализированная технологическая оснастка для лазерной размерной обработки тонкостенных деталей сложной пространственной конфигурации
Способ определения коэффициентов интенсивности напряжений для трещин
Вентилятор турбовентиляторного авиационного двигателя
Способ изготовления фиброармированных пеноблоков и плит, линия для изготовления фиброармированных пеноблоков и плит
Способ управления рулём высоты самолёта
Вибропоглощающий слоистый материал
Препрег герметичного органопластика и изделие, выполненное из него
Состав для защитного покрытия
Препрег антифрикционного органопластика и изделие, выполненное из него
Керамический композиционный материал
Велосипедное шасси летательного аппарата
Самолет с шасси на воздушной подушке
Способ снижения динамической нагруженности транспортного средства при движении по поверхности и транспортное средство
Способ определения интенсивности осадков в реальном времени в авиационных системах улучшенного видения
Линейный асинхронный электропривод
Способ измерения скорости движения подводного объекта
Стенд для испытания конструкции летательного аппарата на механическую прочность под действием изгибающего момента
Гидросамолёт
Способ тушения пожара с использованием группировки робототехнических средств

