Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДЛЯ ОБЛЁТА ЛУНЫ
Вид РИД
Изобретение
Предлагаемый способ управления может быть использован в космической технике при организации облета Луны космическим аппаратом (КА), находящимся, например, в составе околоземной орбитальной станции (ОС). Предполагается, что после проведения облета Луны КА возвращается на исходную околоземную орбиту для последующей стыковки с ОС [1. «Луна. Шаг к технологиям освоения Солнечной системы» под. ред. В.П. Легостаева, M, РКК «Энергия», 2011].
Известен способ управления, выбранный в качестве аналога, в котором выполняется облет Луны. В качестве КА рассматривался космический корабль (КК) «Аполлон-12», выводимый на опорную орбиту с помощью ракеты-носителя (РН) «Сатурн-5». После выведения КК выполняет отлетный импульс для перелета к Луне. Затем у Луны выполняется импульс для перехода на селеноцентрическую орбиту, а после завершения полета вокруг Луны КК выполняет отлетный импульс для перелета к Земле с последующим входом в атмосферу и посадкой в заданном районе и, таким образом, использование этого КА многократно невозможно.
Известен способ управления КА для облета Луны, выбранный в качестве прототипа, включающий приложение к КА, находящемуся на исходной околоземной орбите импульса для облета Луны по возвратной траектории за время t1 [2]. В качестве КА использовался КА «Зонд-7», выводимый на опорную орбиту с помощью РН «Протон». После выведения на околоземную орбиту КА «Зонд-7» выполняет отлетный импульс для облета Луны по возвратной траектории [2. В.И. Левантовский «Механика космического полета в элементарном изложении», М, Наука, 1980]. Основным недостатком такого способа управления является то, что КА после облета Луны входит в атмосферу Земли с последующим приземлением в заданном районе, что также как и в аналоге исключает его многократное использование и является основным недостатком.
Задачей изобретения является возможность отработки КА, предназначенного для многократных перелетов между околоземной ОС и ОС, расположенной на орбите Луны.
Технический результат достигается благодаря тому, что в способе управления КА при облете Луны, включающем приложение к КА, находящемуся на исходной околоземной орбите импульса для облета Луны по возвратной траектории за время t1, в отличие от известного способа через время t2 после облета Луны, необходимое для согласования высоты орбиты прилета с высотой исходной околоземной орбиты, КА возвращают в исходную плоскость околоземной орбиты, для чего после облета КА выводят на эллиптическую орбиту прилета вокруг Земли, а затем на линии пересечения плоскостей орбиты прилета и исходной околоземной орбиты к КА прикладывают импульс в направлении, перпендикулярном плоскости орбиты прилета для поворота линии узлов на угол Δϕ, определенный по формуле:
Δϕ=ωОЗ⋅(t1+t2),
где ωОЗ - угловая скорость прецессии плоскости исходной околоземной орбиты.
Предлагаемый способ рассмотрим на примере КА, пристыкованного к ОС, находящейся на исходной околоземной орбите. Технический результат в предлагаемом способе управления достигается за счет того, что после отделения от ОС и приложения отлетного импульса КА переводится на возвратную траекторию с облетом Луны [2] с длительностью t1 от выдачи отлетного импульса до обратного достижения Земли. По достижению Земли за счет нескольких торможений в атмосфере Земли, переходит на так называемые тормозные эллипсы [2], постепенно снижая высоту орбиты вплоть до высоты орбиты ОС за время t2. За это суммарное время t1+t2 плоскость исходной околоземной орбиты, на которой находится ОС повернется относительно начального положения на угол:
Δϕ=ωОЗ⋅(t1+t2),
где ωОЗ - угловая скорость прецессии плоскости орбиты, возникающая вследствие нецентральности гравитационного поля Земли и составляющая около 5° в сутки. Для согласования плоскостей орбит прилета и исходной околоземной орбиты необходимо на линии их пересечения приложить к КА импульс в направлении, перпендикулярном плоскости орбиты прилета для поворота линии узлов на угол Δϕ. Оптимально, с точки зрения минимизации расходов топлива, этот импульс выполнять после первого входа КА в атмосферу в точке, наиболее близкой к апогею орбиты. После согласования плоскостей и снижение высоты орбиты КА до высоты орбиты ОС КА вновь пристыковывается к ОС.
Сущность изобретения поясняется фиг. 1-4, где:
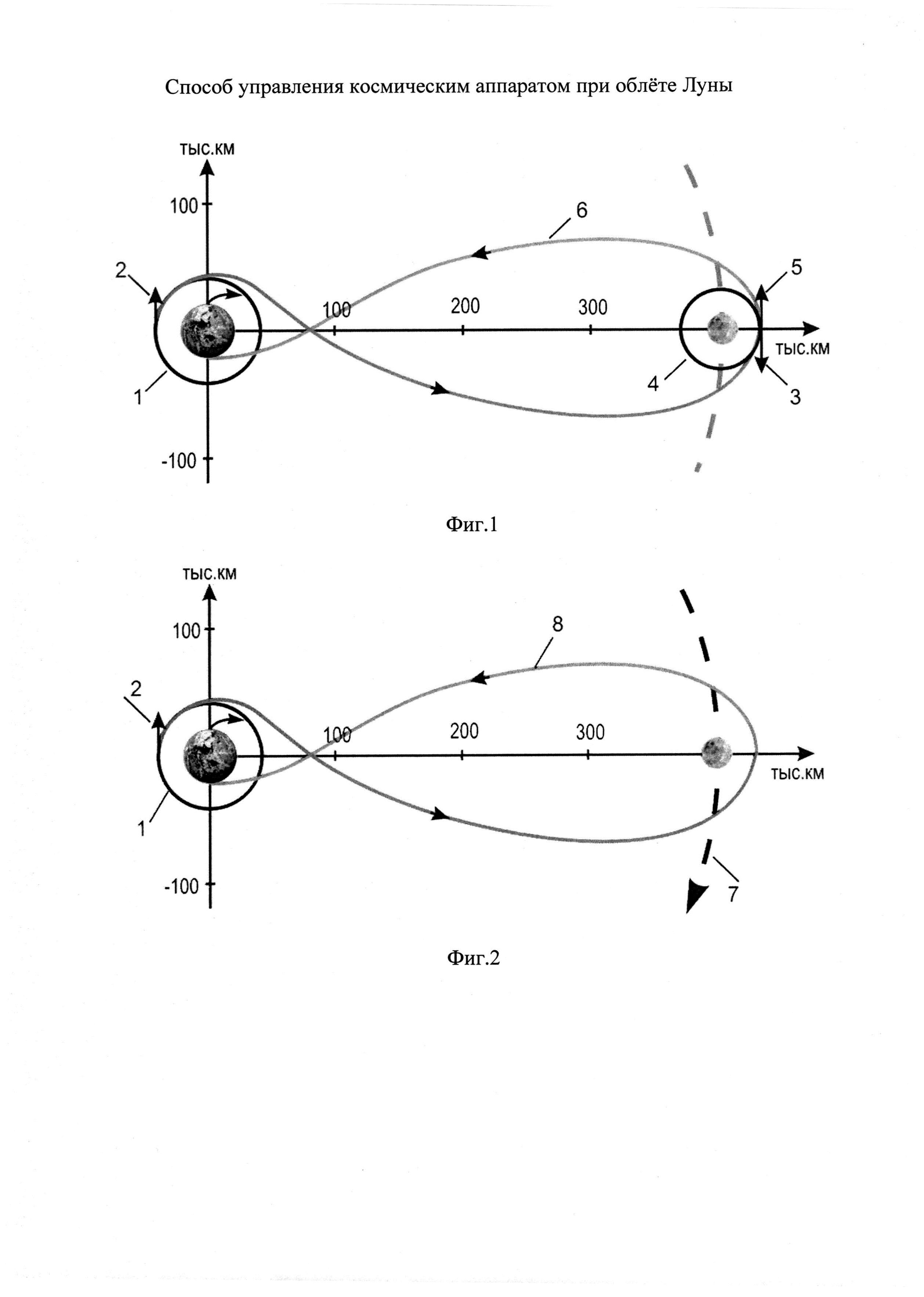
на фиг. 1 показана схема полета аналога - перелет на окололунную орбиту КК «Апполон-12»,
на фиг. 2 приведена схема полета прототипа - облет Луны КА «Зонд-7»,
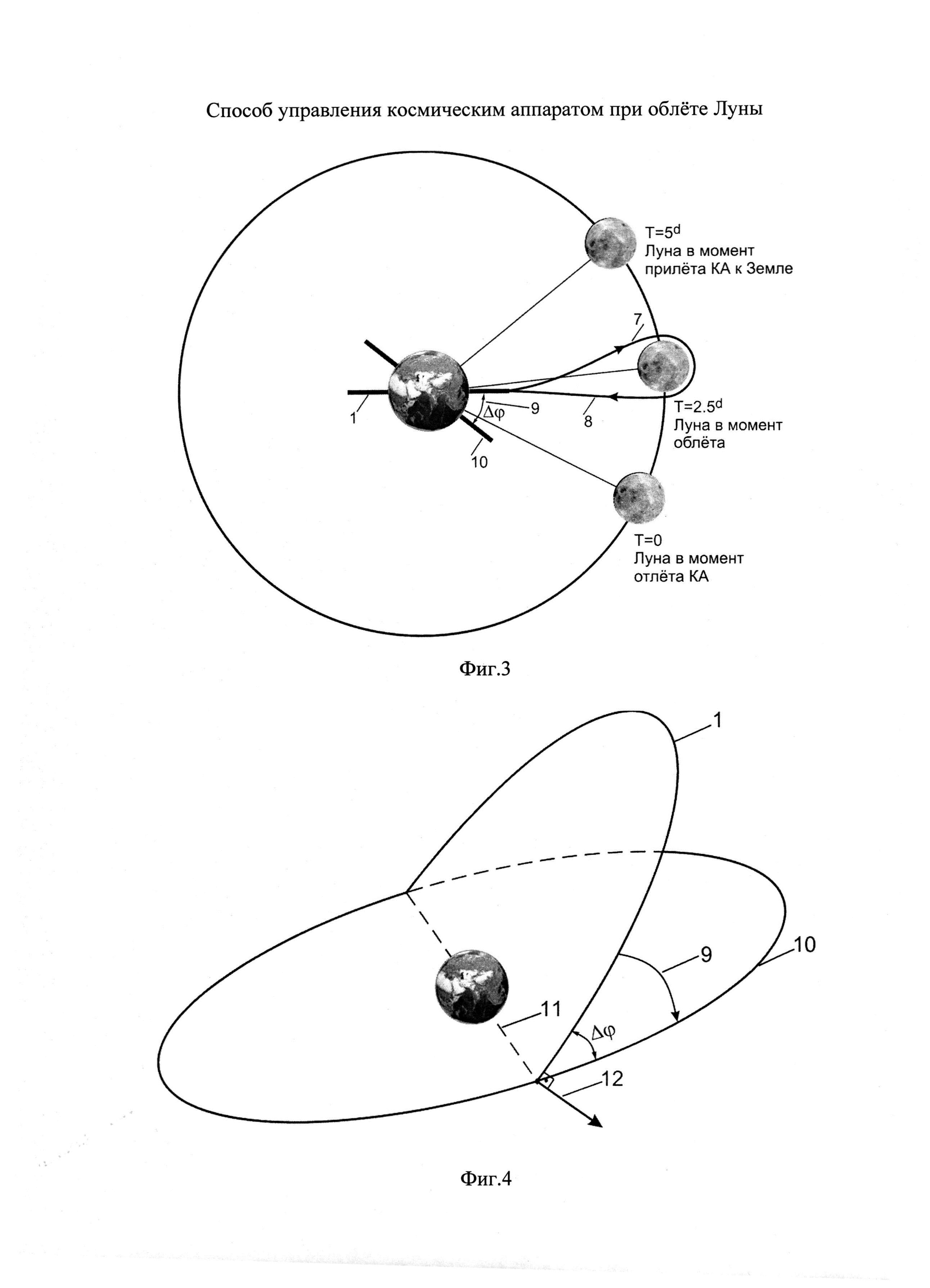
на фиг. 3 поясняется схема полета КА по предлагаемому способу,
на фиг. 4 поясняется схема поворота плоскости орбиты КА по предлагаемому способу,
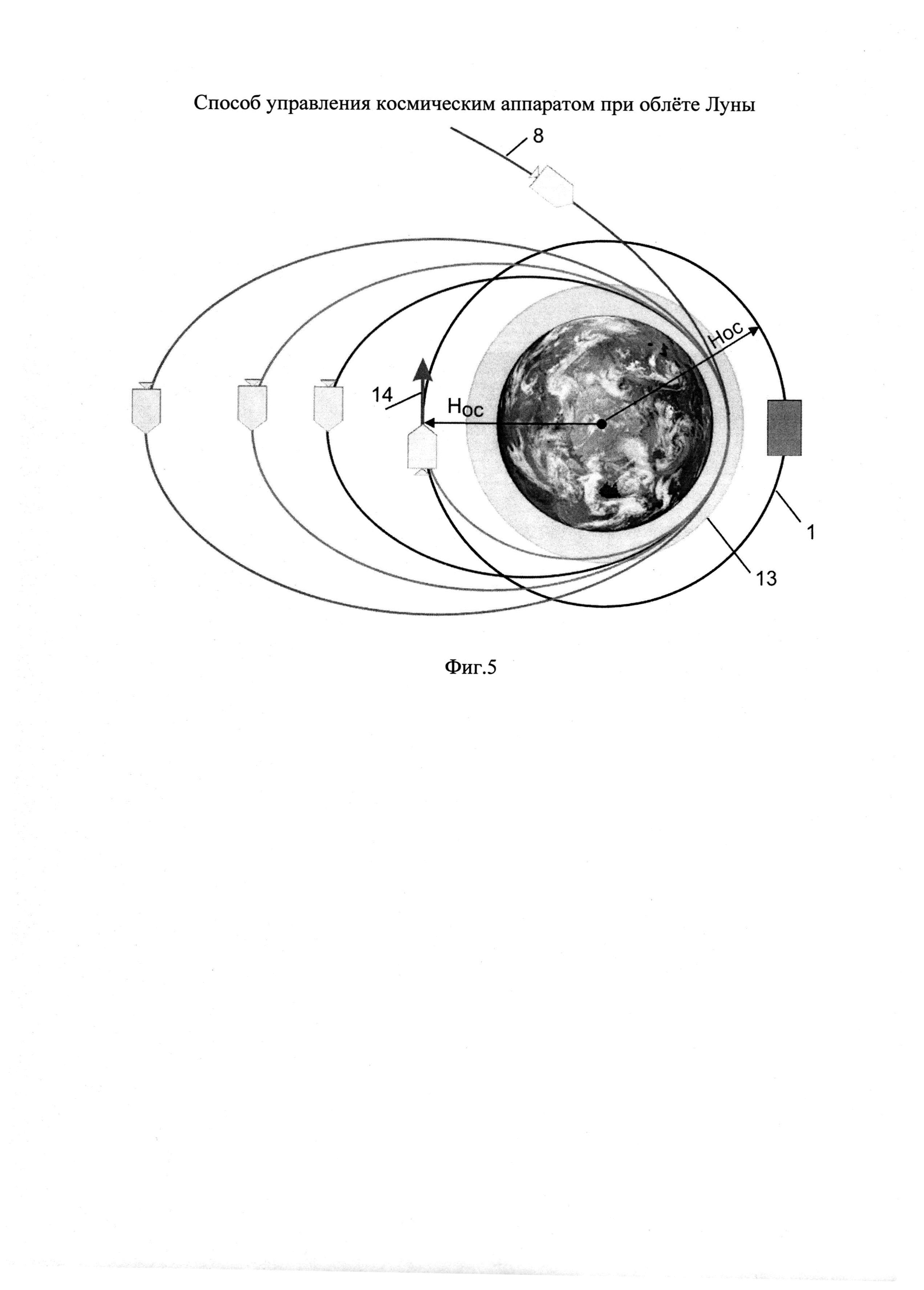
на фиг. 5 представлена схема с последовательными прохождениями на заданном расстоянии от Земли и последующим выходом на орбиту ОС.
На фиг. 1-5 отмечены следующие позиции: 1 - исходная околоземная орбита, 2 - отлетный импульс к Луне, 3 - тормозной импульс, 4 - селеноцентрическая орбита, 5 - отлетный импульс для перелета к Земле, 6 - траектория перелета к Земле, 7 - направление движения Луны, 8 - возвратная траектория КА после облета Луны, 9 - угол разворота плоскости Δϕ, 10 - текущая плоскость орбиты ОС, 11 - линия пересечения двух плоскостей, 12 - импульс поворота плоскости орбиты, 13 - атмосфера Земли, 14 - импульс перехода КА на орбиту околоземной ОС.
На фиг. 1 показана схема полета аналога - перелет на окололунную орбиту по схеме КК «Апполон-12» в системе отсчета вращающейся вместе с линией Земля-Луна. После выведения КК находится на исходной околоземной орбите (1). После приложения отлетного импульса (2), КК перелетает в окрестность Луны, где после выдачи тормозного импульса (3) переходит на селеноцентрическую орбиту (4). Через ~4 суток, когда появляются условия для оптимального перелета к Земле [3. «Основы теории полета космических аппаратов» под ред. Г.С. Нариманова, Машиностроение, Москва, 1972], КК выполняет отлетный импульс (5) и возвращается на Землю по траектории прилета (6) с последующей посадкой в заданном районе.
На фиг. 2 приведена траектория облета Луны с использованием КА «Зонд-7» также в системе отсчета вращающейся вместе с линией Земля-Луна. После выведения КА находится на исходной околоземной орбите (1). В заданной точке орбиты к КА прикладывают отлетный импульс (2), после чего КА облетает Луну со стороны ее движения вокруг Земли (7) и по возвратной траектории прилетает к Земле (8) с последующим приземлением в заданном районе.
На фиг. 3 в проекции на плоскость экватора Земли представлена схема полета КА по предлагаемому способу. После приложения отлетного импульса КА облетает Луну со стороны ее движения вокруг Земли (7) и по возвратной траектории (8) прилетает к Земле с переходом на исходную околоземную орбиту (1), после чего на линии пересечения двух плоскостей выполняется импульс поворота плоскости этой орбиты на угол Δϕ (9), после чего плоскость орбиты КА будет совпадать с текущей плоскостью орбиты ОС (10).
На фиг. 4 поясняется схема поворота плоскости орбиты КА на заданный угол по предлагаемому способу. После прилета к Земле КА возвращается в плоскость околоземной орбиты (1), с которой начался отлет. При этом за время, требуемое для отлета, плоскость орбиты ОС (10) развернется на угол Δϕ (9). При прохождении линии пересечения двух плоскостей (11) к КА прикладывается импульс (12) в направлении, перпендикулярном плоскости орбиты (1), для поворота ее к плоскости орбиты ОС (10).
На фиг. 5 представлена схема перехода КА с возвратной траектории (4) за счет последовательных прохождений в атмосфере Земли (13) на исходную орбиту околоземной ОС (1). КА входит в атмосферу Земли со 2-ой космической скоростью. После первого торможения КА в атмосфере он переходит на эллиптическую орбиту. Последовательные прохождения атмосферы проводятся до тех пор, пока очередной апогей орбиты не достигнет высоты орбиты орбитальной станции НОС. После чего в апогее орбиты выполняется импульс (14) для окончательного перевода КА на орбиту околоземной ОС с последующей с ней стыковкой.
Рассмотрим пример. Пусть V1 - отлетный импульс к Луне (~3200 м/сек). Длительность облета Луны с последующим возвращением к Земле t1 составляет 5 суток, а продолжительность нахождения КА на переходных тормозных эллипсах для согласования высоты орбиты прилета и высоты орбиты ОС t2 - 1.5 суток. Определим по представленной формуле необходимый угол поворота плоскости орбиты прилета КА:
Δϕ=ωОЗ⋅(t1+t2)°~32.5°
Высота апогея первого тормозного эллипса составит около 55 тыс.км, а высота орбиты в точке пересечения двух плоскостей около 22 тыс.км. Затраты характеристической скорости на поворот плоскости орбиты на этой высоте составят около 1650 м/сек [3], а общая продолжительность полета около 6.5 суток.
Устройство удержания магистрали заправки и слива окислителя ракетного разгонного блока
Устройство заправки и слива окислителя ракетного разгонного блока
Устройство измерения интенсивности лучистых потоков при тепловакуумных испытаниях космических аппаратов и способ его эксплуатации
Устройство измерения интенсивности лучистых потоков при тепловакуумных испытаниях космических аппаратов
Блок вентиляторов
Замковое устройство
Способ управления положением солнечных батарей космического аппарата и система для его осуществления
Устройство для дозаправки в полете рабочим телом гидравлической магистрали системы терморегулирования космического аппарата, снабженной гидропневматическим компенсатором объемного расширения рабочего тела, и способ его эксплуатации
Устройство для выбора объекта наблюдения с орбитального космического аппарата
Двухступенчатый двигатель с анодным слоем (варианты)
Способ построения ориентации космического объекта, отделяемого от другого космического объекта
Способ управления движением космического объекта при перелёте с орбиты земли на орбиту луны
Способ управления транспортной космической системой при перелёте космического корабля с окололунной орбиты на околоземную орбиту
Способ управления транспортной космической системой при перелёте космического корабля с орбиты луны на орбиту земли
Способ управления транспортной космической системой
Способ управления транспортной системой при выполнении перелёта на высокоэнергетическую орбиту
Способ управления движением космического объекта при сближении с другим космическим объектом

