Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ
Вид РИД
Изобретение
Предлагаемый способ управления может быть использован в космической технике при организации перелетов многоразового пилотируемого корабля (МПК) между орбитальной станцией (ОС), находящейся на орбите планеты с атмосферой, например МКС и базовой станцией (БС), расположенной на поверхности другого небесного тела, например на Луне.
Известен способ управления транспортной космической системой, выбранный в качестве аналога, включающем приложение к космическому кораблю (КК), находящемуся на околоземной орбите, импульса для его перелета на орбиту другого небесного тела, импульса схода с этой орбиты для последующей посадки на поверхность небесного тела, приложения управляемого воздействия при взлете с поверхности небесного тела и приложение отлетного импульса для обратного перелета к Земле. Такой способ управления был использован в 1969 году во время полета к Луне КК «Аполлон-11» [1. В.И. Левантовский «Механика космического полета в элементарном изложении», М, Наука, 1980] и схема которого приведена на фиг. 1, где: 1 - РН, 2 - КК, 3 - взлетная ступень (ВС) КК, 4 - посадочная ступень (ПС) КК, 5 - РБ. Вначале РН (1) выводит на опорную орбиту связку, состоящую из КК (2), лунного отсека (ЛО), включающего ВС (3) и ПС (4) и разгонного блока РБ (5). Затем с помощью РБ обеспечивается перелет связки на окололунную орбиту. По достижению окололунной орбиты от КК отделяется ЛО, который с помощью двигательной установки ПС, осуществляет посадку на поверхность Луны. По завершению программы нахождения на Луне ВС выполняет взлет с поверхности Луны, оставляя ПС на поверхности Луны, и выполняет промежуточную стыковку с находящемся на окололунной орбите КК для доставки на него экипажа ВС. Затем ВС отделяется, а КК выполняет отлетный импульс для перелета к Земле с последующим входом в атмосферу и посадкой в заданном районе.
Недостатком этого способа является то, что для его реализации потребовалось использование сверхтяжелой РН грузоподъемностью 136 тонн [1], а КК и ЛК являлись одноразовыми и не могли больше использоваться после завершении миссии.
Известен из патента [патент RU №2614460 от 28.03.17] способ управления транспортной космической системой, выбранный в качестве прототипа, включающий отстыковку многоразового пилотируемого корабля (МПК) от ОС, расположенной на околоземной орбите высотой НОС, последовательное приложение импульсов для стыковки с модулем разгонных блоков (МРБ), приложением импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляемого воздействия при взлете с поверхности Луны, приложение отлетного импульса Vотл для обратного перелета к Земле и стыковку с околоземной орбитальной станцией. В качестве МПК рассматривался космический корабль, базирующийся на ОС, расположенной на околоземной орбите высотой НОС. На фиг. 2 приведена схема операций в прототипе - перелета МПК между ОС и поверхностью Луны, с использованием аэроторможения в атмосфере Земли, где: 1 - РН, 2 - КК, 4 - посадочная ступень (ПС) МПК, 5 - РБ, 6 - МРБ, 7 - ОС, 8 - МПК, 9 - торможения в атмосфере Земли.
Вначале с помощью РН (1) на опорную орбиту выводится модуль разгонных блоков (МРБ) (6), состоящий из РБ (5) и ПС (4). Затем от ОС (7) отстыковывается МПК (8) и стыкуется с МРБ. После чего образованная связка, выполняет отлетный импульс для перевода на траекторию полета к Луне. После выработки топлива РБ отделяется от связки. После перехода на заданную окололунную орбиту связка МПК с ПС выполняет сход с нее и осуществляет посадку в заданный район поверхности Луны. По завершению программы нахождения на Луне МПК стартует с Луны, оставляя ПС на поверхности. Взлет МПК осуществляется с азимутом стрельбы, определяемом с учетом текущего взаимного положения Луны и Земли по схеме, использованной при полете автоматической станции «Луна-16» [2]. При этом обратный перелет осуществляется по оптимальной плоской траектории, т.е. отлетный импульс является трансверсальным. За счет выбора времени старта с Луны при обратном перелете МПК решается задача возвращения на околоземную ОС. Траектория перелета к Земле выбирается таким образом, чтобы пройти относительно Земли на высоте, находящейся в атмосфере Земли. За счет аэроторможения обеспечивается снижение скорости КК до 1-ой космической скорости по методу «тормозных» эллипсов [1]. После нескольких торможений в атмосфере Земли (9) и достижению в апогее высоты ОС МПК выполняет импульс подъема перигея до высоты ОС, переходит на орбиту ОС и стыкуется с ней.
Этот способ позволяет отказаться от большого импульса торможения V1 для перехода на околоземную орбиту ОС, что позволяет сэкономить значительное количество топлива.
Основными недостатками такого способа управления являются необходимость иметь аэродинамический зонт с многоразовой теплозащитой и длительное время полета по переходным «тормозным» эллипсам [1], что приводит к необходимости неоднократно пересекать радиационные пояса Земли. Многоразовый аэродинамический зонт требует дополнительных ответственных профилактических работ на околоземной ОС при подготовке последующих перелетов, что также существенно увеличивает стоимость эксплуатации транспортной космической системы (ТС). Также трудно разработать подходящий облик МПК, выполняющий как задачу посадки на поверхность Луны, так и аэроторможение у Земли. Кроме того, для реализации этого способа также требуется сверхтяжелая РН грузоподъемностью более 100 тонн [2].
Техническим результатом изобретения является возможность посадки МПК на поверхность Луны с последующим его возвращением на ОС без аэроторможения и без использования РН сверхтяжелого класса.
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой, включающем отстыковку МПК от ОС, расположенной на околоземной орбите высотой НОС, последовательное приложение импульсов для стыковки с МРБ, приложением импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляемого воздействия при взлете с поверхности Луны, приложение отлетного импульса Vотл Для обратного перелета к Земле и стыковку с околоземной ОС, в отличие от известного перед сходом с орбиты Луны производят расстыковку МПК и МРБ с остатками топлива для полной дозаправки МПК, затем после посадки на Луну производят дозаправку МПК топливом от модуля-заправщика, предварительно доставленного в район посадки, а после взлета с Луны выполняют стыковку с МРБ, от которого дозаправляют топливом, затем отстыковывают МРБ и прикладывают к МПК отлетный импульс Vотл для прохождения от Земли на высоте НОС, по достижению которой к МПК прикладывают импульс V1, определяемый с учетом энергетических возможностей МПК для перевода МПК на эллиптическую орбиту с высотой апогея Нα, после чего МПК стыкуют с тормозным блоком (ТБ), предварительно запущенным на эту эллиптическую орбиту и производят дозаправку МПК, а затем, при прохождении перигея эллиптической орбиты на высоте НОС, к МПК с ТБ прикладывают тормозной импульс V2 для перехода МПК на заданную круговую орбиту НОС и его последующей стыковки с орбитальной станцией.
Предлагаемый способ рассмотрим на примере ОС, находящейся на околоземной орбите. Технический результат в предлагаемом способе управления достигается за счет того, что отдельной РН на околоземную орбиту выводится МРБ, состоящий из РБ и КА-Заправщика, способными выполнить импульсы перевода полезной нагрузки на орбиту Луны. Полностью заправленный МПК, находящийся в составе околоземной ОС, расстыковывается с ОС, а затем сближается и стыкуется с МРБ образовывая связку. Предполагается, что МРБ выводится на орбиту ИСЗ с помощью РН тяжелого класса. Используя энергетические возможности МРБ, к связке прикладывается отлетный импульс для ее перевода на траекторию перелета на орбиту Луны. После выработки топлива РБ отделяется от связки. После достижения орбиты Луны МПК с КА-Заправщиком переходит на окололунную орбиту. Предполагается, что на КА-Заправщике имеются остатки топлива для полной дозаправки МПК. После расстыковки с КА-Заправщиком МПК выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны за счет собственного топлива, которого достаточно для гарантированной посадки в расчетной точке. Для обеспечения возможности стартовать с поверхности Луны на окололунную орбиту потребуется дозаправка МПК топливом. Для этой цели заранее в точку посадки МПК доставляется модуль дозаправки (МД) с топливом, достаточным для взлета МПК с поверхности Луны и перехода на окололунную орбиту. После развития технологии получения топлива за счет гидролиза воды, полученной изо льда, доставленного с кратеров, расположенных в районе Южного полюса Луны, заправку топливом МПК для его взлета можно будет выполнять и без предварительной доставки МД.
После выведения МПК на окололунную орбиту он стыкуется с КА-Заправщиком, доставившем МПК на окололунную орбиту. Для отлета с окололунной орбиты к Земле необходимо выполнить дозаправку МПК остатками топлива от КА-Заправщика. Целевой орбитой у Земли является орбита околоземной ОС. Условия попадания в плоскость с одной стороны обеспечиваются датой отлета к Земле (окно старта примерно раз в 10-11 суток [4. Р.Ф. Муртазин «Транспортная космическая система для обеспечения эксплуатации окололунной орбитальной структуры», ж. Космонавтика и Ракетостроение, 2017(2) №95, с. 55-63]), а с другой стороны условиями для оптимального перелета с орбиты Луны к Земле. Такая возможность появляется два раза в течение лунного месяца, т.е. один раз в 14 дней [1]. Для обеспечения этого условия может понадобиться трехимпульсная схема отлета, когда после первого импульса МПК переходит на высокую эллиптическую орбиту, затем, после второго импульса выполняется поворот плоскости орбиты для оптимального перелета. И, наконец, после третьего импульса МПК покидает окололунную орбиту и осуществляет перелет к Земле. Трехимпульсная схема может потребовать дополнительного времени для полета по высокоэллиптической орбите. Достаточное время для этого оценивается в 0.5-1.5 суток.
Отлетная орбита выбирается таким образом, чтобы минимальная высота пролета у Земли была равна высоте орбиты ОС НОС. При достижении этой высоты МПК выполняет импульс V1 для перехода на высокоэллиптическую орбиту (ВЭО). Высота апогея этой орбиты Нα определяется топливом МПК на выполнение импульса V1, оставшемся от полной заправки после выполнения трехимпульсного маневра отлета.
Для окончательного перехода на орбиту ОС нужно выполнить в перигее ВЭО тормозной импульс V2. Его величина примерно соответствует разнице между скоростью МПК в перигее орбиты и первой космической скоростью за вычетом величины импульса V1. Т.е. чем больше остатков топлива МПК после выполнения отлетного импульса, тем выше импульс V1 и тем меньше необходимая величина импульса V2. Для выполнения импульса V2 на ВЭО предварительно выводится тормозной блок (ТБ), с помощью которого в перигее ВЭО выполняется импульс V2 и, помимо этого проводится дозаправка МПК с целью обеспечения последующих полетов по описанной схеме на поверхность Луны либо парирования НШС. После перехода на орбиту ОС ТБ отстыковывается, а МПК стыкуется с ОС.
Сущность изобретения поясняется фиг. 1÷5, где:
на фиг. 1 приведена схема операций в аналоге ТС- КК «Апполон-11»,
на фиг. 2 приведена схема операций в прототипе - перелета МПК между ОС и поверхностью Луны, с использованием аэроторможения в атмосфере Земли,
на фиг. 3 представлена схема операций в предлагаемой транспортной системе,
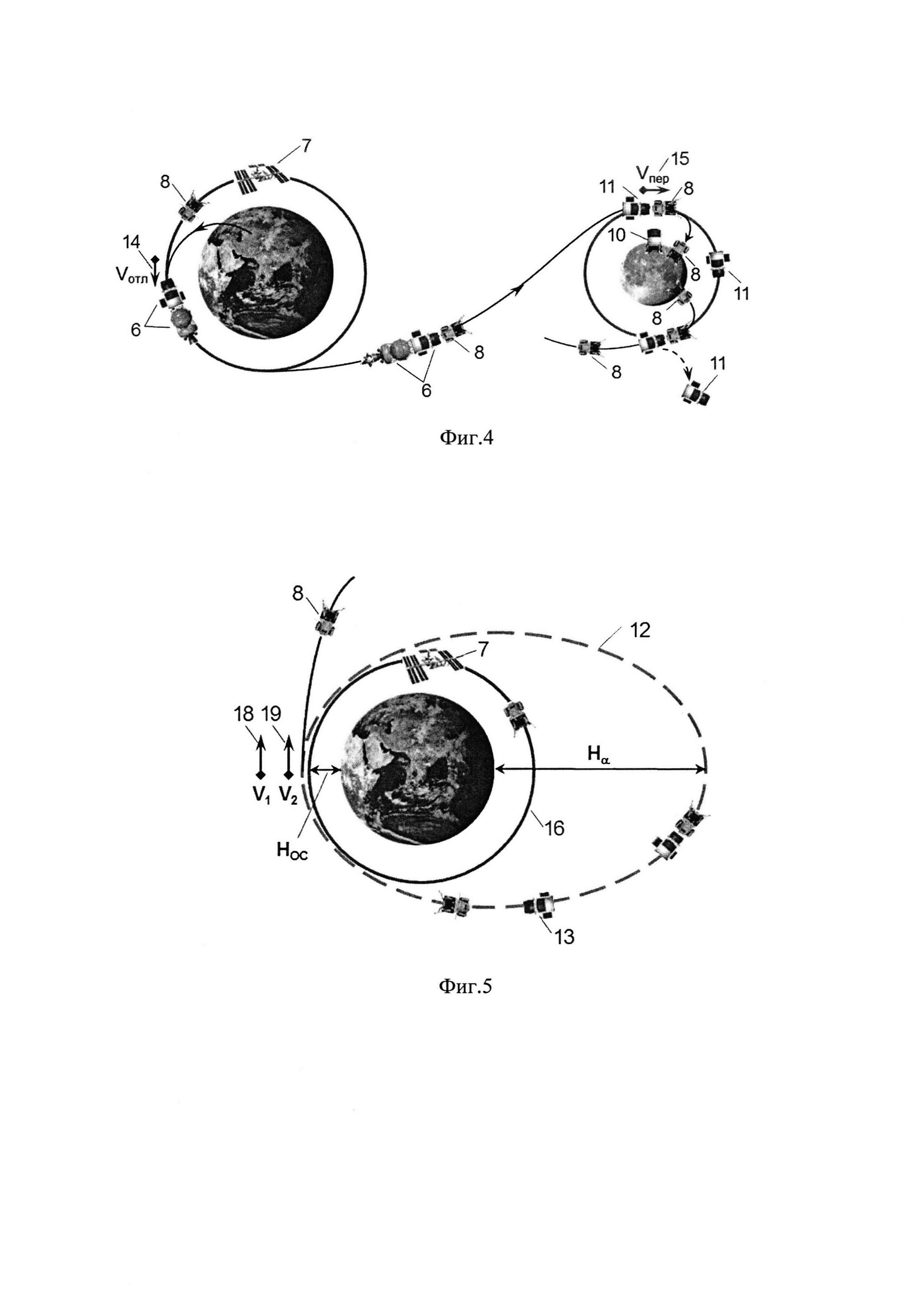
на фиг. 4 представлена баллистическая схема перелета МПК с орбиты ОС на поверхность Луны вплоть до обратного отлета к Земле,
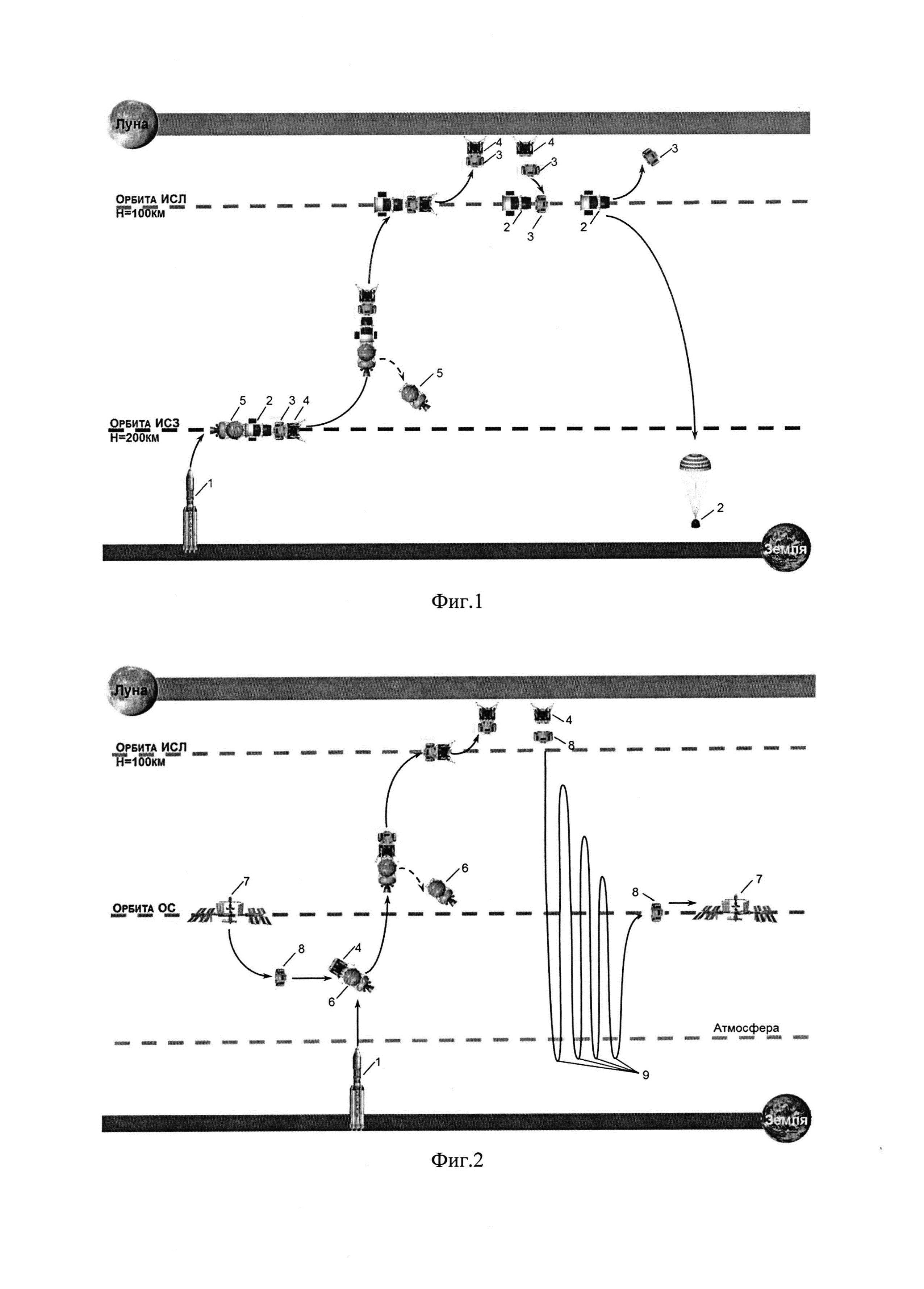
на фиг. 5 представлена баллистическая схема перехода МПК с прилетной траектории вначале на ВЭО, а затем окончательно на орбиту ОС.
На этих фиг. отмечены следующие позиции:
1 - РН, 2 - КК, 3 - взлетная ступень (ВС) КК, 4 - посадочная ступень (ПС) КК, 5 - РБ, 6 - МРБ, 7 - ОС, 8 - МПК, 9 - торможения в атмосфере Земли, 10 - МД, 11 - КА-Заправщик, 12 - ВЭО, 13 - ТБ, 14 - отлетный импульс к Луне Vотл., 15 - тормозной импульс перехода на окололунную орбиту Vпер, 16 - орбита ОС, 18 - импульс перехода на ВЭО V1, 19 - импульс перехода на орбиту ОС V2.
На фиг. 3 представлены схема полета предлагаемой транспортной системы.
Вначале в предполагаемую точку посадки с помощью РН (1) и МРБ (6) выводится модуль дозаправки (МД) (10), который будет использован впоследствии для дозаправки МПК (8) в точке посадки на поверхности Луны. Затем на ОС (7) доставляется КК (2) с экипажем для будущей лунной экспедиции. Следующим РН на околоземную орбиту выводится МРБ, состоящий из РБ (5) и КА-Заправщика (11), с которым стыкуется МПК, отстыкованный от ОС. После выполнения отлетного импульса МПК с помощью КА-Заправщика переводится на окололунную орбиту, с которой МПК, за счет собственного топлива выполняет посадку в предполагаемую точку посадки на Луне. КА-Заправщик с оставшимся топливом остается на окололунной орбите в ожидании МПК после его взлета с Луны. Для старта с поверхности Луны и выполнения сближения и стыковки с КА-Заправщиком МПК должен выполнить дозаправку от МД. Для отлета с окололунной орбиты и перехода на ВЭО (12) используется топливо, дозаправленное в МПК от КА-Заправщика, после чего КА-Заправщик отстыковывается. Так как топливные баки МПК рассчитаны на такие операции как взлет с Луны или посадку на Луну, требующие около 2 км/с в пересчете на характеристическую скорость, то полностью заправленный МПК может только выполнить трехимпульсный маневр отлета с окололунной орбита, а оставшееся топливо потратить на выполнение импульса V1 для перехода на ВЭО. На ВЭО МПК стыкуется с предварительно запущенным на эту орбиту ТБ (13). МПК дозаправляется от ТБ, в основном для выполнения будущей миссии на поверхность Луны и выполняет с помощью ТБ импульс V2 для перехода на орбиту ОС. После чего МПК стыкуется с ОС, а экипаж на КК (2) возвращается на Землю.
На фиг. 4 представлена баллистическая схема перелета МПК (8) после расстыковки с ОС (7) на поверхность Луны вплоть до обратного отлета к Земле,
После расстыковки с ОС МПК стыкуется с МРБ (6), а затем связка выполняет отлетный импульс Vотл (14) для перелета к Луне. У Луны связка из МПК и КА-Заправщика (11) средствами КА выполняет тормозной импульс Vпер (15) для перехода на окололунную орбиту. После расстыковки МПК выполняет посадку на поверхность Луны с помощью собственного топлива, а КА - Заправщик продолжает полет на окололунной орбите в ожидании последующей стыковки с МПК. В точке посадки МПК заправляется от МД (10) и, по завершению миссии стартует на окололунную орбиту для стыковки с КА-Заправщиком. Для отлета с окололунной орбиты используется топливо, полученное от КА-Заправщика.
На фиг. 5 представлена баллистическая схема перехода МПК (6) у Земли вначале на ВЭО (12), а затем на орбиту ОС (16). После пролета Земли на расстоянии НОС МПК выполняет импульс V1 (17), величина которого определяется остатками топлива в МПК для перехода на ВЭО с высотой апогея Нα. Предварительно на ВЭО выводится ТБ с топливом для дозаправки МПК. После стыковки МПК с ТБ (13) при прохождении перигея на высоте НОС выполняется тормозной импульс V2 (19) для перехода МПК на орбиту ОС, после чего он стыкуется с ОС (7).
Эффективность предлагаемого способа управления транспортной системой показана по сравнению с реализованной транспортной системой при проведении лунных миссий КК «Аполлон» в 60-х-70-х годах прошлого столетия.
Для реализации этого способа использовалась РН сверхтяжелого класса «Сатурн-5» грузоподъемностью 136 тонн. При этом масса КК на момент его прилета к Луне составляла около 50 тн, из которых полная масса ЛО составляла ~15 тн, а масса ПС и ВС около 10 тн и 4 тн соответственно. Масса ВС в 4 тн позволяла иметь сухую массу ВС в 2180 кг с общим полезным объемом 6.7 м3 и свободным объемом для двух космонавтов ~4.5 м3. Общий объем КО, на котором весь экипаж, состоящий из 3-х человек, возвращался на Землю составлял ~6 м3 [1].
Рассмотрим возможности предлагаемой транспортной космической системы. В качестве ОС на которой будет базироваться МПК можно рассматривать МКС. Экипаж для выполнения полета к Луне доставляется на околоземную ОС и обратно на Землю на корабле «Союз-МС», выводимого с помощью РН «Союз-2-1А».
Как видно из фиг. 3 МПК проводит несколько основных операций, на выполнение которых затрачивается полный запас топлива. Главные операции, определяющие массовые характеристики МПК это спуск с низкой окололунной орбиты и посадка на поверхность Луны и обратный взлет для стыковки с КА-Заправщиком на окололунной орбите. Характеристическая скорость на эти операции составляет ΔVПОТР ~2 км/с. Так как идеология, заложенная в предполагаемый способ, рассматривает полное использование топлива МПК на операцию, то сухую массу МПК можно определить из формулы Циолковского [1]:

где М0 - начальная масса МПК М0=Мсух+Мтопл, а Мк - конечная масса или Мк=Мсух, Руд - удельный импульс двигателя, использующего топливо из высококипящих компонентов, например Руд=334 сек [5. Вестник НПО им. Лавочкина №2, 2017]. Очевидно, преобразуя формулу (1) получим Мсух, как функцию от Мтопл и ΔVПОТР:

Так как, согласно предлагаемому способу управления, топливо на взлет с Луны должно быть доставлено заранее, то оценим возможности доставки топлива на Луну с использованием перспективной РН грузоподьемностью 37.5 тн [6. Ю. Коптев, Ю. Кузнецов, «Космос в открытом доступе», ж. Военно-Промышленный Курьер, №32(598), 26.08.2015]. Исходя из допустимой грузоподъемности РН, которую обозначим как РН-1, примем, что полезная нагрузка состоит из кислородно-водородного РБ (КВРБ) с характеристиками: Руд=468.5 сек, Мсух=3.5 тн и Мтопл=19 тн и модуля дозаправки (МД), доставляемого в район посадки МПК, с характеристиками: Руд=334 сек, Мсух=2.0 тн и Мтопл=13 тн. Проводя расчеты с использованием формулы Циолковского и исходя из того что КВРБ обеспечивает отлетный импульс к Луне (около 3.25 км/с с учетом гравитационных потерь), а МД обеспечивает торможение у Луны 0.85 км/с и посадку на Луну - 1.95 км/с или суммарно 2.8 км/с, можно получить, что - располагаемый запас топлива на Луне для дозаправки составит 4.380 тн. Будем в дальнейшем ориентироваться на гарантированный запас топлива в 4.250 тн, которому, согласно (2), соответствует Мсух~5.050 тн или М0=Мсух+Мтопл=9.3 тн. Ограничим Мсух до 4.75 тн и, тем самым, получим полную массу заправленного МПК в 9 тн. Согласно формуле Циолковского при таких характеристиках МПК может получить суммарный импульс около 2090 м/с, что гарантировано достаточно для посадки на Луну с низкой окололунной орбиты или старту с Луны на низкую окололунную орбиту..
Другой критической операцией, определяющей массовые характеристики МПК является его доставка на низкую окололунную орбиту. Согласно предлагаемому способу МПК стыкуется с МРБ, состоящим из КВРБ и КА-Заправщика, и выводимым на РН-2 того же класса, что и РН-1. Пусть КВРБ имеет те же массовые характеристики, что и КВРБ, использованный при доставке МД на Луну. В тоже время КА-Заправщик по сравнению с МД будет иметь Мсух=1.5 тн и Мтопл=13.5 тн (перераспределение за счет отсутствия на КА средств посадки). Отлетный импульс к Луне для связки КВРБ-КА-Заправщик-МПК разбивается на два. Первый с использованием КВРБ, а второй с помощью КА-Заправщика. Т.к. отлет к Луне будет выполняться с орбиты ОС, то отлетный импульс с учетом гравитационных потерь оценивается в 3050 м/с. Вместе с тем, из-за необходимости довыведения МРБ на орбиту ОС Мтопл в КВРБ уменьшится на тонну и составит Мтопл=18 тн. Расчеты с использованием формулы Циолковского показывают, что с помощью КВРБ можно выполнить первый импульс отлета величиной 2.3 км/с. Соответственно КА-заправщик должен выполнить второй импульс отлета величиной 0.75 км/с и тормозной импульс 0.85 км/с для перехода на окололунную орбиту. На эти два импульса суммарно потребуется 9.275 тн, т.е. остаток топлива в баках КА-заправщика составит 4.225 тн, что достаточно для дозаправки МПК после его старта с Луны и стыковки с КА-Заправщиком, как предложено в способе.
Следующей операцией для МПК после дозаправки на окололунной орбите является отлет от Луны к Земле и переход на высокоэллиптическую орбиту (ВЭО) у Земли. Оптимальный старт с поверхности Луны, расположенной в приполярных областях Луны на низкую полярную орбиту возможен раз в два часа. Условия для «попадания» в плоскость орбиты ОС появляются раз в 10-11 суток [4]. Оптимальный отлет к Земле с лунной орбиты возможен каждые 14 суток. Так как для МПК возвращение в плоскость орбиты ОС является приоритетным, то с высокой степенью вероятности на эту дату условия для оптимального отлета к Земле не будут выполняться и потребуется изменение положения плоскости орбиты. Наиболее оптимально использовать трехимпульсную схему отлета с поворотом плоскости орбиты. По оценкам [1] при использовании в качестве промежуточной эллиптическую орбиту с периодом в 36 часов и повороте плоскости орбиты на 90° максимальное дополнительное увеличение отлетного импульса составит 0.24 км/с. Таким образом, если принять отлетный импульс в 0.9 км/с [1], то предельное значение суммарного импульса при отлете составит 1.14 км/с. Как было уже описано выше, полная заправка МПК в 4.25 тн соответствует импульсу с характеристической скоростью 2.09 км/с. Таким образом, минимальная величина импульса V1 для перехода на ВЭО составит 2.09-1.14=0.95 км/с. Соответственно для перехода на эту орбиту с низкой околоземной орбиты высотой 200 км необходимо выполнить импульс 3.15-0.95=2.2 км/с, что соответствует высоте апогея ВЭО Нα=23.5 тыс. км с периодом орбиты ~6.8 час.
Согласно предлагаемому способу третья дозаправка МПК выполняется на высокоэллиптической орбите. Оценим энергетические возможности тормозного блока (ТБ), выводимого на эту орбиту с помощью еще одной РН-3 того же класса, что и РН-1. Пусть в качестве КВРБ используется тот же блок, что и на РН-1 и РН-2, но с меньшей заправкой, т.е. Мсух=3.5 тн и Мтопл=14.5 тн. Оставшаяся полезная масса в 19.5 тн относится к ТБ с Мсух=2.5 тн и Мтопл=17 тн. Предполагается, что вначале после стыковки с ТБ МПК заправляется топливом в количестве Мтопл=4.25 тн для последующих миссий на поверхность Луны, а затем вся связка средствами ТБ в перигее высокоэллиптической орбиты выполняет тормозной импульс V2 для перехода на орбиту ОС.
Мтопл=14.5 тн достаточно для КВРБ чтобы выполнить импульс 2.2 км/с и доставить ТБ на ВЭО. После стыковки МПК с ТБ образуется связка с общей массой М=Мтб+Мка=19.5+4.75=24.25 тн. После дозаправки в ТБ: останется Мтопл=12.75 тн. Этого топлива достаточно чтобы обеспечить суммарный импульс величиной 2.44 км/с, т.е. перевести МПК с ВЭО на орбиту ОС вплоть до проведения операций сближения с последующей утилизацией ТБ. В реальности существует еще резерв топлива за счет того, что поворот плоскости лунной орбиты при отлете будет меньше 90°, и соответственно апогей высокоэллиптической орбиты будет дополнительно снижен, что приведет к экономии топлива на ТБ.
Представленный пример показывает, как, используя предлагаемый способ управления транспортной системой обеспечить посадку на Луну многоразового транспортного корабля (МПК). В качестве средств выведения для реализации этого способа используется три РН с грузоподъемностью 37.5 тн, а полная масса заправленного МПК составит 9 тн.
Сравним полученные характеристики МПК с ЛВПК «Орел». Сухая масса ВП составляла около 2.2 тн при заправке 2.0 тн. при этом рабочий объем составил 6.7 м3, в том числе 4.5 м3 свободный объем для двух космонавтов. В нашем случае облик МПК должен быть близок к ЛВПК «Орел», но сухая масса МПК будет почти в 2.5 раза больше, что позволит создать более комфортные условия для экипажа.
В целом можно сделать вывод, что предлагаемый способ управления с размещением в составе околоземной ОС специального многоразового пилотируемого корабля для посадки на поверхность Луны позволит создать транспортную космическую систему с существенно меньшими расходами на ее разработку, производство и отработку.
Способ управления транспортной космической системой, включающий отстыковку многоразового пилотируемого корабля от орбитальной станции, расположенной на околоземной орбите высотой Н, последовательное приложение импульсов для стыковки с модулем разгонных блоков, приложение импульсов для перелета на орбиту Луны и для схода с этой орбиты при посадке на поверхность Луны, приложение управляемого воздействия при взлете с поверхности Луны, приложение отлетного импульса V для обратного перелета к Земле и стыковку с околоземной орбитальной станцией, отличающийся тем, что перед сходом с орбиты Луны производят расстыковку многоразового пилотируемого корабля и модуля разгонных блоков с остатками топлива для полной дозаправки многоразового пилотируемого корабля, затем после посадки на Луну производят дозаправку многоразового пилотируемого корабля топливом от модуля-заправщика, предварительно доставленного в район посадки, а после взлета с Луны выполняют стыковку с модулем разгонных блоков, от которого дозаправляют топливом, затем отстыковывают модуль разгонных блоков и прикладывают к многоразовому пилотируемому кораблю отлетный импульс V для прохождения от Земли на высоте Н, по достижении которой к многоразовому пилотируемому кораблю прикладывают импульс V, определяемый с учетом энергетических возможностей многоразового пилотируемого корабля, для перевода многоразового пилотируемого корабля на эллиптическую орбиту с высотой апогея Нα, после чего многоразовый пилотируемый корабль стыкуют с тормозным блоком, предварительно запущенным на эту эллиптическую орбиту, и производят дозаправку многоразового пилотируемого корабля, а затем при прохождении перигея эллиптической орбиты на высоте Н к многоразовому пилотируемому кораблю с тормозным блоком прикладывают тормозной импульс V для перехода многоразового пилотируемого корабля на заданную круговую орбиту Н и его последующей стыковки с орбитальной станцией.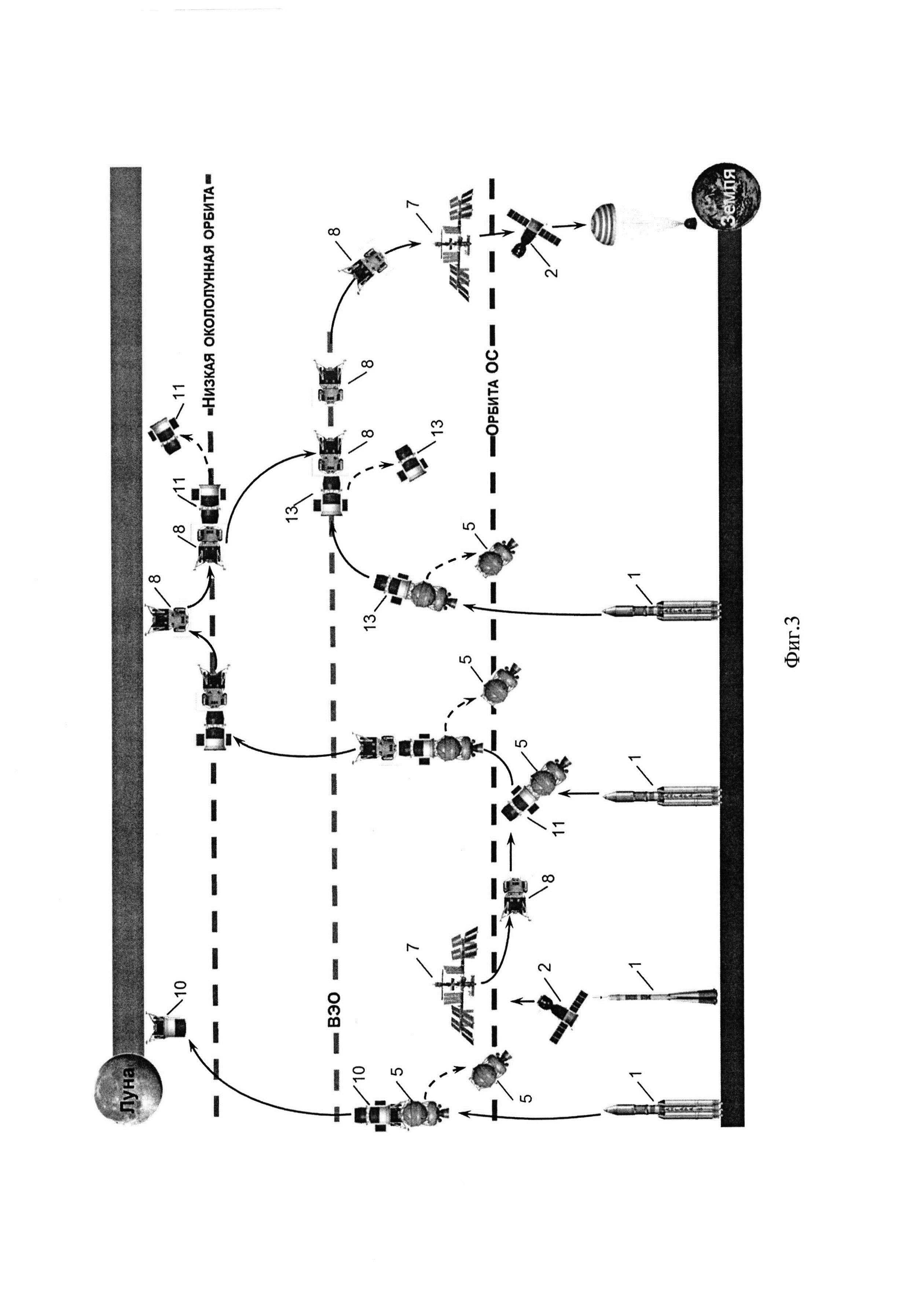
Способ поиска и обнаружения микроорганизмов космического происхождения
Способ и устройство взятия проб вещества с поверхности астрономического объекта
Способ проведения режима циклирования герметичной никель-кадмиевой аккумуляторной батареи
Способ контроля текущего состояния солнечной батареи космического аппарата с инерционными исполнительными органами
Ракетный разгонный блок
Способ контроля положения фронтальной части ледника с находящегося на околокруговой орбите космического аппарата
Блок конденсаторов и способ контроля его исправности (2 варианта)
Механизм герметизации стыка стыковочного агрегата космического корабля
Способ контроля телеметрической информации
Способ контроля действий находящегося на борту космического аппарата космонавта
Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом
Способ управления движением стыкуемых космических объектов
Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом
Способ управления движением космического объекта после отделения от другого космического объекта
Способ управления транспортной космической системой
Способ управления космическим аппаратом для облёта луны
Способ управления транспортной космической системой
Способ управления космическим аппаратом для облёта луны
Способ управления космическим кораблём при сближении с кооперируемым космическим аппаратом
Способ управления движением космического объекта при сближении с другим космическим объектом

