Результат интеллектуальной деятельности: АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления и может быть использовано в системах адаптивного управления.
Известна адаптивная система управления астатическим объектом с запаздыванием (патент РФ №2513847, опубл. 20.04.2014 г.). Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, а не его производные. Результат работы системы - обеспечение устойчивости и хорошего качества работы системы управления при действии на астатический объект с запаздыванием по управлению аддитивного, незатухающего, ограниченного по модулю возмущения. Для этого система содержит объект регулирования, задатчик, три интегратора, пять сумматоров, один блок задания коэффициентов, два умножителя.
Недостаток системы в том, что для идентификации объекта управления используются возмущающие сигналы управления, в результате воздействия их на объект, последний отклоняется от номинального режима работы, и выход объекта управления не соответствует своему критерию оптимальности.
Известна самонастраивающаяся система управления (заявка на изобретение №92010390, опубл. 27.08.1996 г). Изобретение относится к области адаптивных систем управления с пробным синусоидальным сигналом. Цель работы системы - повышение точности и быстродействия работы системы путем частотного разделения каналов регулирования и самонастройки, что достигается включением в контур главной обратной связи системы заграждающего фильтра, настроенного с помощью блока фазовой автоподстройки частоты на частоту критических колебаний объекта. По амплитуде и периоду этих колебаний с помощью вычислительного блока рассчитываются требуемые настройки ПИД-регулятора. Этим обеспечиваются постоянные запасы устойчивости в замкнутой системе при дрейфе параметров объекта управления.
Недостатком данной системы является то, что пробный синусоидальный сигнал возбуждает объект управления и тем самым отклоняет его от номинального режима работы, и в некоторых случаях может ввести объект в зону неустойчивости.
Известна адаптивная система управления с идентификатором и неявной эталонной моделью (патент РФ №2108612, опубл. 10.04.1998 г.). Изобретение относится к системам автоматического управления динамическими объектами широкого класса с неизвестными переменными параметрами и неконтролируемыми возмущениями. Итог работы системы заключается в упрощении условий и сокращении времени для достижения цели адаптации замкнутой системы управления, а также в расширении области применения системы на класс существенно нестационарных (нелинейных с текущей линеаризацией) объектов управления с неконтролируемыми внешними возмущениями. Результат обеспечивается за счет того, что система содержит сумматор, первый и второй регуляторы, фильтр низких частот, объект управления, блок текущей идентификации, блок априорной информации о матрице эффективности управления и блок настройки регуляторов.
Недостаток изобретения - это управляющее воздействие, подаваемое на вход объекта управления, которое существенно отклоняет его от номинального режима работы.
Известна адаптивная система управления (патент РФ №2461037, опубл. 10.09.2012 г.). Изобретение относится к электрическим самонастраивающимся системам управления, а именно к области адаптивных систем управления с пробным гармоническим сигналом, и предназначено для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами. Итог работы системы заключается в повышении быстродействия за счет снижения времени самонастройки системы. Адаптивная система управления, включающая схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АЧХ, блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход - через третий ключ ко второму входу генератора гармонических колебаний, первый вход которого объединен со вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен ко второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход ко второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход - ко второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ ко второму входу схемы сравнения.
Недостатком данного изобретения является подаваемый на вход объекта сигнал управления, имеющий гармоническую форму (синусоида), который возбуждает объект управления, тем самым отклоняя его от номинального режима работы.
Известна частотная адаптивная система управления (патент РФ №2413270, опубл. 27.02.2011 г.). Изобретение относится к области систем автоматического управления объектами широкого класса с неизвестными, медленно изменяющимися параметрами и неизвестными ограниченными внешними возмущениями. Результатом работы системы является обеспечение устойчивости адаптивной системы при дрейфе параметров объекта. Он достигается путем настройки генератора испытательного сигнала, обеспечивая границы его частот близкими к границам собственных частот объекта. Это позволяет существенно сократить время идентификации, что обеспечивает устойчивую работу системы. Для этого система содержит блок настройки параметров генератора.
Недостаток в том, что генератор испытательных сигналов подает на вход объекта управления управляющий сигнал, который возбуждает и отклоняет объект управления от номинального режима работы.
Известна адаптивная система управления с двухэтапным идентификатором и неявной эталонной моделью (патент РФ №2258951, опубл. 20.08.2005 г.), принятая за прототип. Предлагаемое изобретение относится к области систем автоматического управления динамическими объектами. Итог работы системы заключается в обеспечении задаваемого (с помощью эталонной модели) качества управления в замкнутой системе при отсутствии априорной информации о матрице эффективности управления объекта и невозможности измерения производных. Процесс текущей идентификации организуется в два этапа. На первом этапе вычисляется оценка матрицы эффективности управления объекта. На втором - оценивается матрица собственных динамических свойств объекта. Система содержит два сумматора, первый и второй регуляторы, фильтр низких частот, объект управления, блок второго этапа текущей идентификации, блок настройки регуляторов, блок первого этапа текущей идентификации, блок полосовых фильтров.
Недостатками является то, что на объект подается сигнал управления, имеющий гармоническую форму, что приводит к возбуждению объекта и отклонению системы от номинала.
Данное изобретение устраняет указанный недостаток.
Техническим результатом является автоматическая настройка регулятора без возбуждающих управляющих воздействий, подаваемых на объект управления.
Технический результат достигается тем, что система содержит один идентификатор, вход которого подключен к выходу сумматора, а выход - к дигратору, который соединен с регулятором.
Адаптивная система управления поясняется следующими чертежами:
фиг. 1 - результаты математического моделирования;
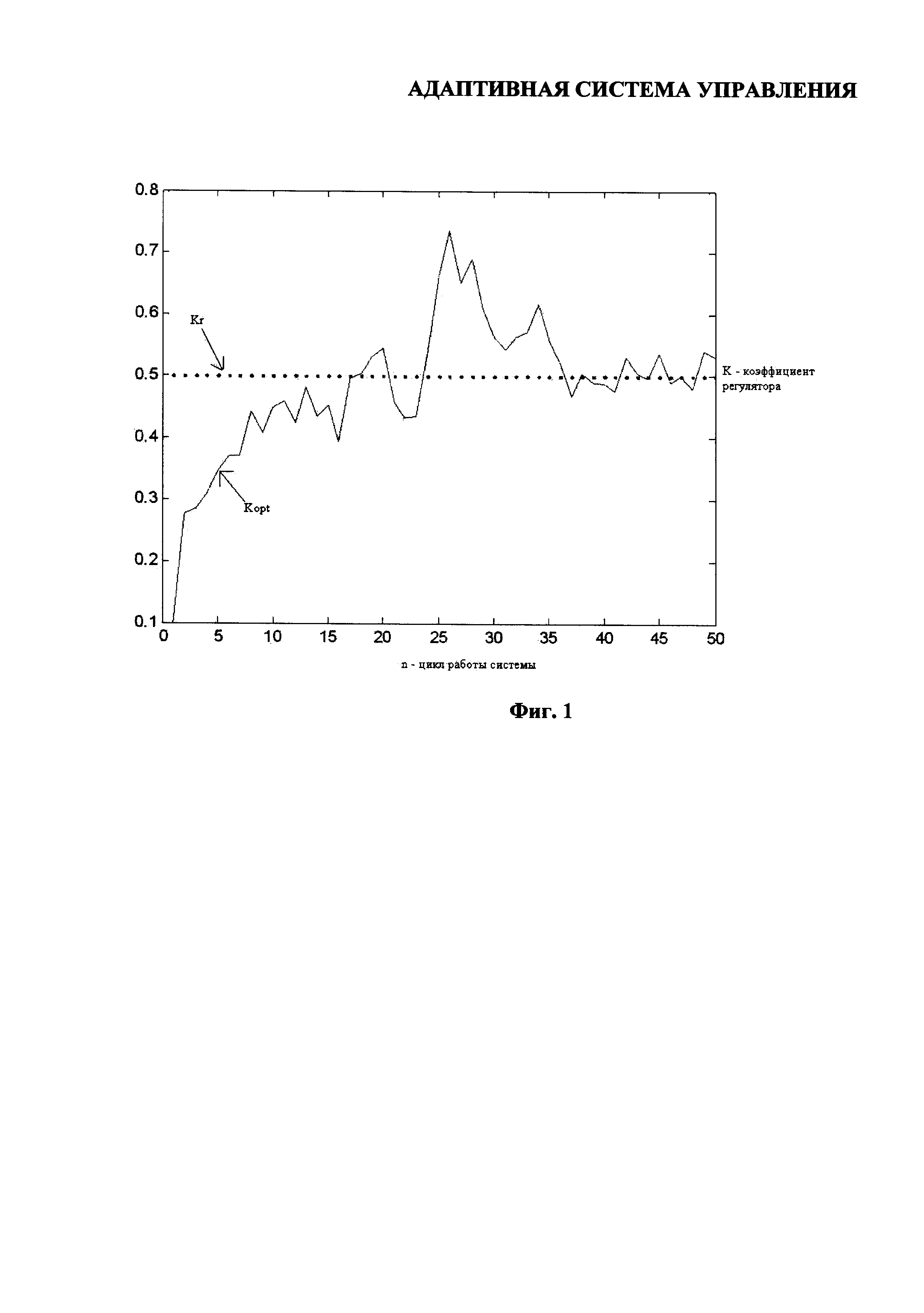
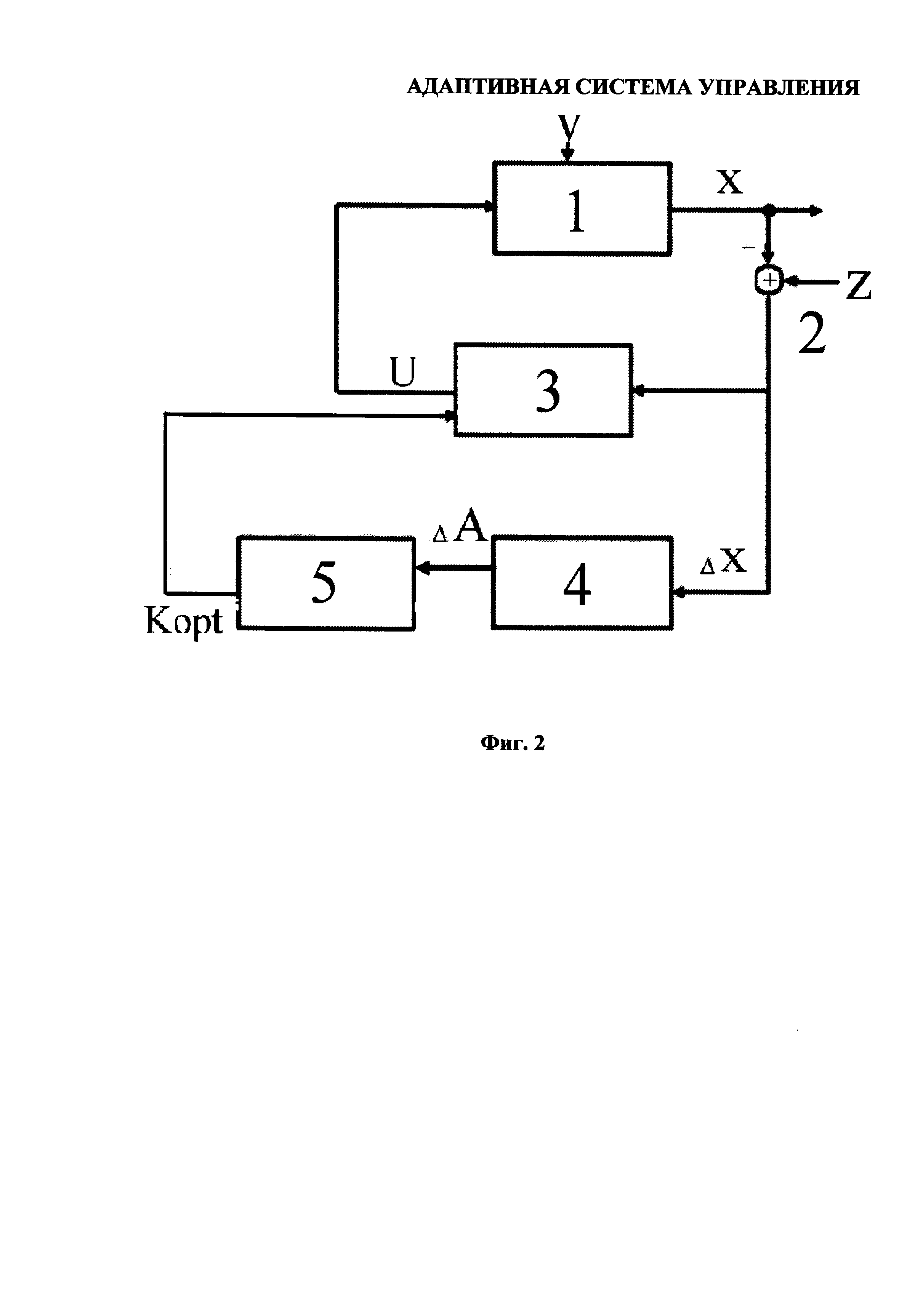
фиг. 2 - структурная схема системы регулирования с адаптивной настройкой регулятора, где:
1 - объект управления,
2 - сумматор,
3 - регулятор,
4 - идентификатор,
5 - дигратор.
Адаптивная система управления содержит (фиг. 2) объект управления 1 входом, соединенный с регулятором 3, также на объект воздействуют внешние возмущения V, а выход объекта связан с сумматором 2, на второй вход подается уставка Z, выход сумматора подается на регулятор 3 и идентификатор 4, выход идентификатора подключен к дигратору 5, выход которого подключен к регулятору 3.
Система работает следующим образом (фиг. 2). На объект управления 1 воздействует возмущение V, реакция объекта управления подается на сумматор 2, на второй вход которого подается задание для объекта управления, вычисляется разность этих двух сигналов - невязка, которая в свою очередь подается на регулятор 3 и идентификатор 4, на регуляторе согласно текущим настройкам рассчитывается управление, которое подается на объект управления. На идентификатор поступает невязка, после 30 циклов работы идентификатора вычисляется результирующая матричная константа замкнутого контура, которая затем передается в дигратор 5, в котором рассчитываются оптимальные коэффициенты настройки регулятора. Дигратор подключен к регулятору и передает ему рассчитанные оптимальные настройки. Таким образом, не подается специального возбуждающего воздействия на объект управления в момент настройки, что позволяет настраивать регулятор в любое время и отрицательно не влияет на работу объекта управления.
Введены следующие обозначения:
x - вектор состояния объекта - совокупность выходных переменных, исчерпывающе определяющих его состояние,
u - вектор управления - совокупность управляющих воздействий на объект,
ν - вектор возмущения - совокупность всех возмущений, приведенных ко входу объекта,
А, В - постоянные m×m и m×1 матрицы коэффициентов. В этих обозначениях уравнение объекта 1 в дискретном времени выглядит следующим образом:
x(t+1)-x(t)=А⋅x(t)+В⋅u(t)+ν(t),
где ut - закон управления и равняется ut=-K⋅xt.
Для оптимального регулятора 3 из условия J=xT⋅x+1/γ(uT⋅u)→min, где γ - относительный показатель ограничения управляющих воздействий, тогда оптимальный закон П-регулятора:
ut=-(BT⋅B)-1BT⋅A⋅xt, т.е.
ut=-K⋅xt,
где K=1/(1+γ)⋅(BT⋅B)-1BT⋅A.
Введем обозначение контура как единого целого: объект 1 плюс регулятор 3. Из полученных соотношений исключим управление и получим уравнение замкнутого контура регулирования
x(t+1)=(A-B⋅K)x(t)+ν(t),
ΔА=А-В⋅K,
ΔA - результирующая матричная константа замкнутого контура.
Идентифицируем уравнение контура с коэффициентом регулятора, равным Кнач.
Простейший способ идентификации линейной модели по матрице ΔА - это метод наименьших квадратов (МНК).

Находим:

На первом цикле через Кнач находим ΔA1, затем считаем, что нам известен порядок постоянной матрицы коэффициентов В, и находим А, на следующем цикле, находим В, используя А с прошлого цикла. Используем метод итерации для нахождения А и В. Таким образом, через некоторое количество циклов найденные коэффициенты приблизятся к коэффициентам модели и соответственно настройки регулятора приблизятся к оптимальным.
А=ΔА1+В⋅Кнач
Далее находим Kopt1 через А
Kopt1=1/(1+γ)⋅(BT⋅B)-1BT⋅A
Второй цикл:

B=(A-ΔA2)/Kopt1,
Kopt2=1/(1+γ)⋅(Вт⋅В)-1BT⋅А.
Алгоритм работы блока идентификатора 4:
вход xt+1 и xt, а выход - ΔА, находится по формуле  . Блок работает 30 циклов, в конце вычисляет ΔА и передает в следующий блок.
. Блок работает 30 циклов, в конце вычисляет ΔА и передает в следующий блок.
Алгоритм работы блока дигратора 5:
вход ΔА и выход Kopt находятся по формулам соответственно В=(А-ΔА)/K, А=ΔА+В⋅K, на первом цикле берем коэффициент В и находим через него А, а затем и Kopt1. На втором цикле рассчитываем по вычисленному на прошлом цикле коэффициенту A, В и Kopt2.
Таким образом, работа системы выглядит следующим образом: с объекта управления поступает Х - выход объекта управления, поступает на сумматор и в нем вычисляется невязка выхода объекта и задания Z, эта невязка поступает на регулятор, который вычисляет по отклонению от задания управляющее воздействие для объекта. Невязка также поступает и на идентификатор, на котором вычисляется матричная константа замкнутого контура, которая подается на дигратор. На выход дигратора поступают настройки для регулятора, которые подаются на последний.
Пример: в качестве примера запишем модель объекта первого порядка с П-регулятором.
Уравнение объекта имеет вид
X(n+1)=X(n)*Ar+Br*U(t)+Cr*V,
где Ar и Br - константы модели объекта, U(t+1)=-Kopt*X(n), Kopt=(BT*B)-1*BT*A, V - возмущение типа белого шума в пределах от -1 до 1, Kr - коэффициент, вычисленный непосредственно через коэффициенты модели, поэтому оно идеально для управления данной моделью. Kopt - коэффициент, вычисленный системой для регулятора.
Зададимся численными значениями для модели объекта: Ar=0.5 и Br=1, Cr=0.5, Kr=0.5,
для системы: В=2; А=1; Kopt=0.2.
На первых трех циклах работы идентификатора получаем:
1. U(t+1)=-02*0=0
X(n+1)=0*0.5+1*0+0.5*0.82=0.41
2. U(t+1)=-0.2*0.41=0.0805
X(n+1)=0.41*0.5+1*0.0805-0.5*0.96=-0.1945
3. U(t+1)=0.2*0.1945=0.0973
X(n+1)=-0.1945*0.5+1*0.0973+0.5*0.83=0.4150.
Ha выходе идентификатора получаем матрицу ΔA=∑[X(n+1)*X(n)m]*X(n)*X(n)m]-1
ΔA=0.1587, А=0.1587+2*0.2=0.5587, отсюда находим новое значение
Kopt=(2Т*2)-1*2Т*0.5587=0.2793.
На следующем цикле получаем:
ΔA=-0.1330,
B=(0.5587+0.1330)/0.2793=1.4239,
Kopt=(1.4239T*1.4239)-1*1.4239T*0.5587=0.3924.
На 3 цикле получаем:
ΔA=0.2702, А=0.2702+1.4239*0.3924=0.8289,
Kopt=(1.4239T*1.4239)-1*1.4239T*0.8289=0.5821.
График для данного примера зависимости Kopt от n (цикла) представлен на фиг. 1, из этого можно заключить вывод, что значение Kopt стремится к Kr без специальных воздействий на систему.
Вводя в систему идентификатор и дигратор, мы получаем новую функцию, которая идентифицирует замкнутый контур объект-регулятор и вычисляет оптимальные настройки регулятора, без специальных возмущающих объект воздействий.
Адаптивная система управления, содержащая объект управления, выход которого подключен к входу сумматора, на который также подается задание, выход сумматора подключен к входу регулятора, а его выход подключен к входу объекта управления, на второй вход которого подается возмущающее воздействие, отличающаяся тем, что система содержит один идентификатор, вход которого подключен к выходу сумматора, а выход - к дигратору, который соединен с регулятором.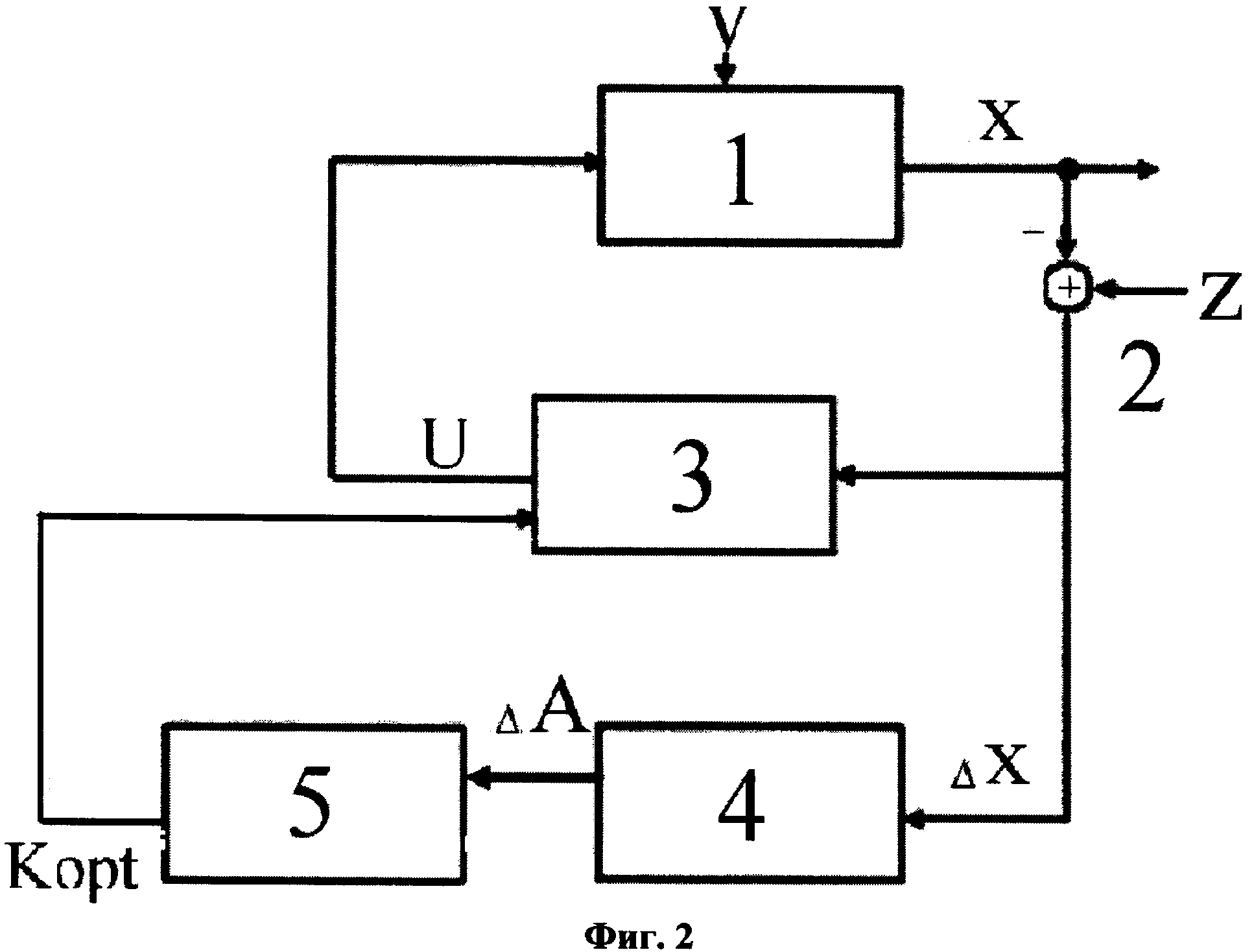
Энергоэффективный тяговый электропривод автономного транспортного средства
Способ получения лигатуры алюминий-эрбий
Способ обогащения флюоритовых руд
Когенерационная система энергоснабжения кустовой буровой установки
Плавучая платформа
Способ получения вяжущего
Состав для вытеснения для закачки в глинизированный нефтяной пласт
Перфоратор
Способ формирования и разработки техногенного месторождения и устройство для его осуществления
Способ обогащения флюоритовых руд
Способ контроля параметров дуговых печей
Способ хирургической коррекции дефектов рубца на матке после кесарева сечения
Способ хирургической коррекции дефектов рубца на матке после кесарева сечения
Способ управления процессом измельчения материала в барабанной мельнице

