Результат интеллектуальной деятельности: НАВИГАЦИЯ ОТНОСИТЕЛЬНО ПЛОЩАДКИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ РАССТОЯНИЯ
Вид РИД
Изобретение
Область техники
Изобретение относится к средствам и методам навигации объекта относительно площадки с использованием измерений расстояния.
Предпосылки создания изобретения
Для многих случаев применения должно быть известно относительное положение и ориентация между двумя площадками. К этим случаям применения относятся автоматическая посадка беспилотного летательного аппарата (БПЛА) на неподвижную или движущуюся площадку, такую как корабль, помощь пилоту при посадке, постановка судна в док и многое другое. Кроме того, желательно, чтобы эта информация была также доступной в средах, где в доступе к ГНСС (Глобальной навигационной спутниковой системе) отказано. Простоты ради, одна из вовлеченных площадок в дальнейшем обозначена как судно, другая площадка - как БПЛА.
Навигационная система, которая способна предоставить необходимую информацию об относительном положении и ориентации, состоит из четырех или более транспондеров на борту судна и трех или более антенн на борту БПЛА. Антенны передают запросные сигналы, на которые отвечают транспондеры. Затем эти ответы принимаются антеннами. Измеряется время между передачей запросного сигнала и приемом ответа, что позволяет рассчитать расстояние между антенной и отвечающим транспондером.
Также может быть измерено доплеровское смещение принятого сигнала, что может быть преобразовано в измерение относительной скорости между антенной и транспондером. Кроме того, вместо использования транспондеров на борту судна, также могут быть использованы синхронизированные псевдоспутники (псевдолиты). Эти псевдоспутники передают сигналы, сходные с сигналами глобальной навигационной спутниковой системы (ГНСС), которые принимаются антеннами на борту БПЛА. При таком сценарии БПЛА не нужно передавать сигналы, но измерения расстояния смещаются сдвигом тактового генератора приемника, а доплеровские измерения смещаются погрешностью частоты тактового генератора приемника.
Система относительной навигации, как описанная выше, рассматривается в публикации «Stand-Alone Ship-Relative Navigation System Based on Pseudolite Technology» («Автономная система навигации относительно судна на основе технологии псевдоспутников»); Aulitzky, С; Heinzinger, О; Bestmann, U; Hecker, P.;» AIAA Guidance, Navigation, and Control Conference, 10-13 August 2009, Chicago, Illinois, USA. В способе, представленном в этой работе, относительное положение каждой антенны относительно каркаса корпуса судна оценивается с использованием нелинейного подхода наименьших квадратов и применяются ограничения, чтобы учитывать относительную геометрию между этими антеннами. Затем из относительных положений антенн рассчитывается относительная ориентация. Это решение имеет несколько недостатков:
- количество неизвестных, подлежащих оценке, возрастает с количеством антенн,
- доплеровские измерения не могут быть учтены,
- измерения расстояния, сделанные от всех антенн до всех транспондеров/псевдоспутников, должны быть действительными в один и тот же момент времени, иначе вводятся систематические ошибки. Другими словами, невозможно производить измерения последовательно, то есть измеряя расстояния между первой антенной и транспондерами/псевдоспутниками, затем измеряя расстояния со второй антенной, а после этого измеряя расстояния с третьей антенной. Такой подход дает измерения расстояния с разным временем действительности для каждой антенны. Очень серьезным недостатком является то, что способ, описанный в указанной выше работе, вводит системные ошибки в таком сценарии, потому что многие имеющиеся в наличии системы измерения расстояния работают именно таким образом,
- измерения дополнительных датчиков, таких как блок инерциальных измерений (БИИ) и радиолокационный или лазерный высотомер, не могут быть легко учтены, что также является серьезным недостатком.
Описание изобретения
Поэтому целью изобретения является создание способа навигации объекта относительно площадки с использованием измерений расстояний, который может преодолеть, по меньшей мере, часть вышеупомянутых недостатков известной системы относительной навигации.
Эта цель достигнута предметом независимых пунктов формулы изобретения. Другие варианты осуществления изобретения показаны в зависимых пунктах формулы изобретения.
Принципиальная идея изобретения заключается в том, чтобы оценивать относительное положение и ориентацию каркаса корпуса БПЛА относительно судна напрямую, вместо оценки относительных положений антенн БПЛА (второй объект) относительно судна (первый объект), как описано в публикации «Stand-Alone Ship-Relative Navigation System Based on Pseudolite Technology)); Aulitzky, C; Heinzinger, O; Bestmann, U; Hecker, P.;» AIAA Guidance, Navigation, and Control Conference, 10-13 August 2009, Chicago, Illinois, USA, которая включена здесь в качестве ссылки. Это может быть сделано с помощью алгоритма оценки пространства состояний, например фильтра Калмана, фильтра точки сигма или других фильтров, либо в формулировке полного пространства состояний, либо в формулировке пространства состояний ошибки. Изобретательский подход обеспечивает следующие преимущества: количество неизвестных не возрастает с количеством антенн; могут быть учтены доплеровские измерения; измерения расстояния, сделанные от всех антенн до всех транспондеров/псевдоспутников, могут быть действительными в любой момент времени, пока он известен, не требуется, чтобы все антенны производили синхронизированные измерения, что облегчает использование имеющихся в наличии систем измерения расстояния; измерения дополнительных датчиков, таких как блок инерциальных измерений и радиолокационные или лазерные высотомеры, могут быть легко учтены.
Вариант осуществления изобретения относится к способу навигации объекта относительно площадки с использованием измерения расстояния, причем:
- четыре или более передатчика сигналов определения положения расположены на и/или около площадки первого объекта и
- второй объект, приближающийся к площадке, содержит три или более приемника для приема сигналов определения положения и
причем способ содержит действия по:
- выполнению для каждого принятого сигнала определения положения измерения расстояния между передатчиком сигнала определения положения и приемником сигнала определения положения, и
- оценке относительного положения и относительной ориентации каркаса корпуса второго объекта по отношению к первому объекту прямо посредством обработки измерений расстояния с помощью алгоритма оценки пространства состояний, реализующего модель системы первого и второго объекта.
Кроме того, оценка относительного положения и относительной ориентации каркаса корпуса второго объекта по отношению к первому объекту может содержать обработку измерений одного или более дополнительного датчика, прежде всего радиолокационного или лазерного высотомера.
Алгоритм оценки пространства состояний может быть фильтром Калмана, фильтром точки сигма или другим фильтром, позволяющим производить оценку пространства состояний, либо в формулировке полного пространства состояний, либо в формулировке пространства состояний ошибки.
Алгоритм оценки пространства состояний может содержать формулировку пространства состояний ошибки и выполнять следующие итеративные действия по:
предположению относительного положения и относительной ориентации второго объекта из измерений расстояний,
оценке ошибок в предполагаемых относительном положении и относительной ориентации второго объекта и
коррекции предполагаемых относительного положения и относительной ориентации второго объекта на основе оцененных ошибок.
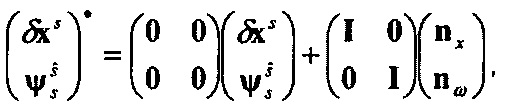
Алгоритм оценки пространства состояний может реализовывать следующее системное дифференциальное уравнение для оценки ошибок в предполагаемых относительном положении и относительной ориентации второго объекта:

причем  означает ошибки в относительном положении,
означает ошибки в относительном положении,  означает ошибки в относительно ориентации, nω и nx образуют вектор шума системы.
означает ошибки в относительно ориентации, nω и nx образуют вектор шума системы.
Предполагаемая относительная ориентация второго объекта может быть распространена на стадии предсказания фильтра алгоритма оценки пространства состояний с использованием измерений дополнительных датчиков, прежде всего блока инерциальных измерений.
Алгоритм оценки пространства состояний может моделировать измерение расстояния  между j-тым передатчиком и i-тым приемником следующим образом:
между j-тым передатчиком и i-тым приемником следующим образом:

причем  означает положение j-того передатчика, nρij означает шум измерения расстояния и причем положение i-того приемника
означает положение j-того передатчика, nρij означает шум измерения расстояния и причем положение i-того приемника  дано выражением
дано выражением

где  означает положение начальной точки Ob каркаса корпуса второго объекта,
означает положение начальной точки Ob каркаса корпуса второго объекта,  означает плечо кренящего момента от начальной точки Ob каркаса корпуса второго объекта к i-тому приемнику, а
означает плечо кренящего момента от начальной точки Ob каркаса корпуса второго объекта к i-тому приемнику, а  означает матрицу направляющих косинусов, которая трансформируется из каркаса корпуса второго объекта в каркас корпуса первого объекта, причем эта матрица направляющих косинусов связана с предполагаемой матрицей направляющих косинусов через ошибки относительной ориентации.
означает матрицу направляющих косинусов, которая трансформируется из каркаса корпуса второго объекта в каркас корпуса первого объекта, причем эта матрица направляющих косинусов связана с предполагаемой матрицей направляющих косинусов через ошибки относительной ориентации.
Модель системы, реализованная с помощью алгоритма оценки пространства состояний, может быть расширена состояниями ошибок относительной скорости, и способ дополнительно содержать действия по:
выполнению доплеровского измерения с каждым принятым сигналом положения и
оценке относительной скорости каркаса корпуса второго объекта по отношению к первому объекту посредством обработки доплеровских измерений с помощью расширенного алгоритма оценки пространства состояний.
Согласно еще одному варианту осуществления изобретения предусмотрен носитель записи для хранения реализующей предлагаемый в изобретении способ компьютерной программы, например CD-ROM, DVD, карта памяти, дискета или аналогичный носитель данных, подходящий для хранения компьютерной программы для электронного доступа.
Еще один вариант осуществления изобретения относится к компьютеру, сконфигурированному с помощью реализующей предлагаемый в изобретении способ компьютерной программы и, как описано здесь, для навигации относительно площадки. Компьютер может быть расположен, например, на борту БПЛА и обрабатывать сигналы определения положения, принимаемые через антенны БПЛА от датчиков, расположенных на или около площадки для управления процедурой автоматического и автономного захода на посадку БПЛА.
Еще один вариант осуществления изобретения относится к устройству для навигации объекта относительно площадки, содержащему
- блок измерения расстояния для выполнения для принятого сигнала определения положения измерения расстояния между передатчиком сигнала определения положения, расположенным на и/или около площадки первого объекта, и приемником второго объекта, приближающегося к площадке, с помощью которого принимается сигнал положения, и
- средства обработки для оценки относительного положения и относительной ориентации каркаса корпуса второго объекта по отношению к первому объекту посредством обработки измерений расстояния между передатчиком сигналов определения положения и приемником сигналов определения положения с помощью алгоритма оценки пространства состояний, реализующего модель системы первого и второго объекта, причем средства обработки сконфигурированы для реализации способа согласно изобретению и как он описан здесь.
Еще один вариант осуществления изобретения относится к транспортному средству, прежде всего БПЛА, содержащему:
- три или более приемника для приема сигналов определения положения, излучаемых четырьмя или более передатчиками, расположенными на и/или около площадки другого транспортного средства, и
- устройство согласно изобретению и как оно описано здесь.
Еще один вариант осуществления изобретения относится к системе навигации объекта относительно площадки с использованием измерений расстояния, содержащей:
- четыре или более передатчика сигналов определения положения, которые расположены на и/или около площадки первого объекта,
- три или более приемника для приема сигналов определения положения, которые расположены на борту второго объекта, приближающегося к площадке, и
- устройство согласно изобретению и как оно описано здесь. В системе передатчик сигнала определения положения может быть реализован в виде транспондера, выполненного для ответа на запросный сигнал, переданный приемником ответным сигналом, а приемник может быть выполнен для приема в качестве сигнала определения положения ответного сигнала от транспондера и для измерения времени между передачей запросного сигнала и приемом ответного сигнала, причем измеренное время обрабатывается для измерения расстояния.
В качестве альтернативы или дополнительно, в системе передатчик сигнала положения может быть реализован в виде псевдоспутника, выполненного для излучения сигнала, сходного с сигналом глобальной навигационной спутниковой системы, в качестве сигнала определения положения, причем несколько псевдоспутников, расположенных на и/или около площадки первого объекта, синхронизированы, а приемник может быть выполнен для приема сигнала определения положения от псевдоспутника и измерения времени передачи сигнала определения положения, причем измеренное время передачи обрабатывается для измерения расстояния.
Эти и другие аспекты изобретения будут очевидными и будут пояснены со ссылкой на варианты осуществления, описанные ниже.
Далее изобретение будет описано более детально со ссылкой на примерные варианты осуществления. Однако изобретение не ограничено этими примерными вариантами осуществления.
Краткое описание чертежей
Показано на:
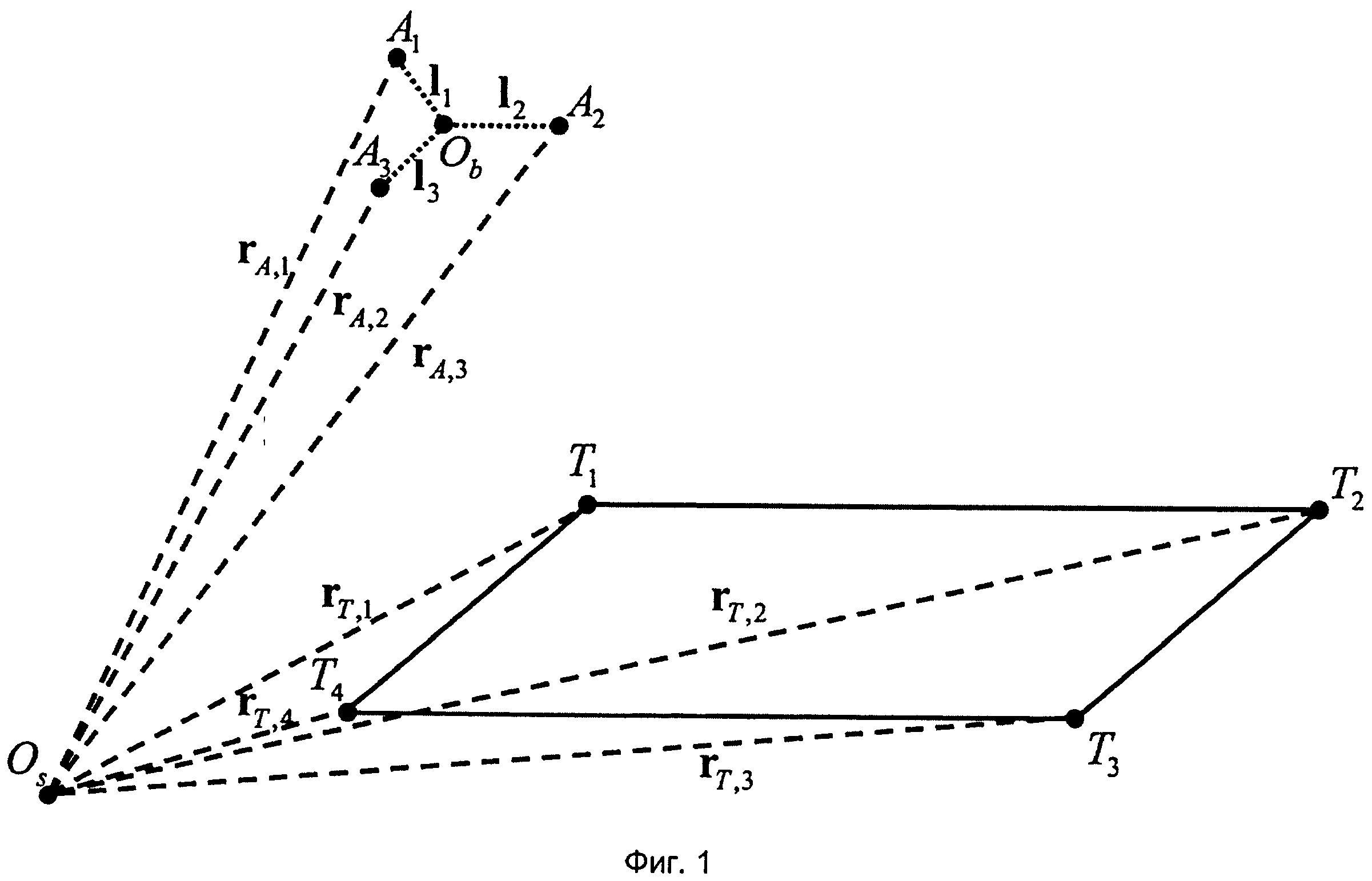
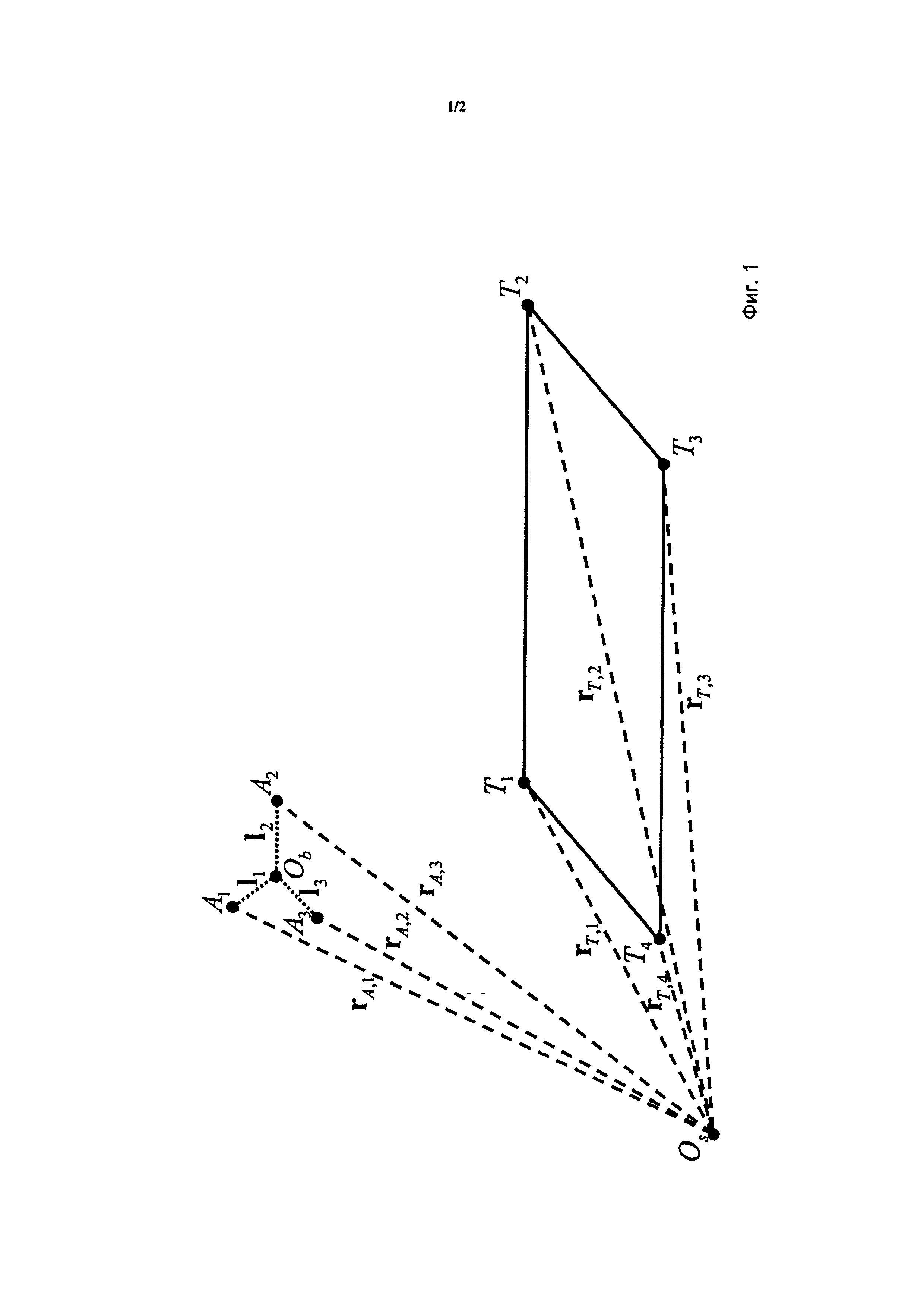
Фиг. 1: пример геометрии системы БПЛА с тремя антеннами, приближающегося к посадочной площадке судна, которая содержит 4 транспондера, излучающих сигналы определения положения; и
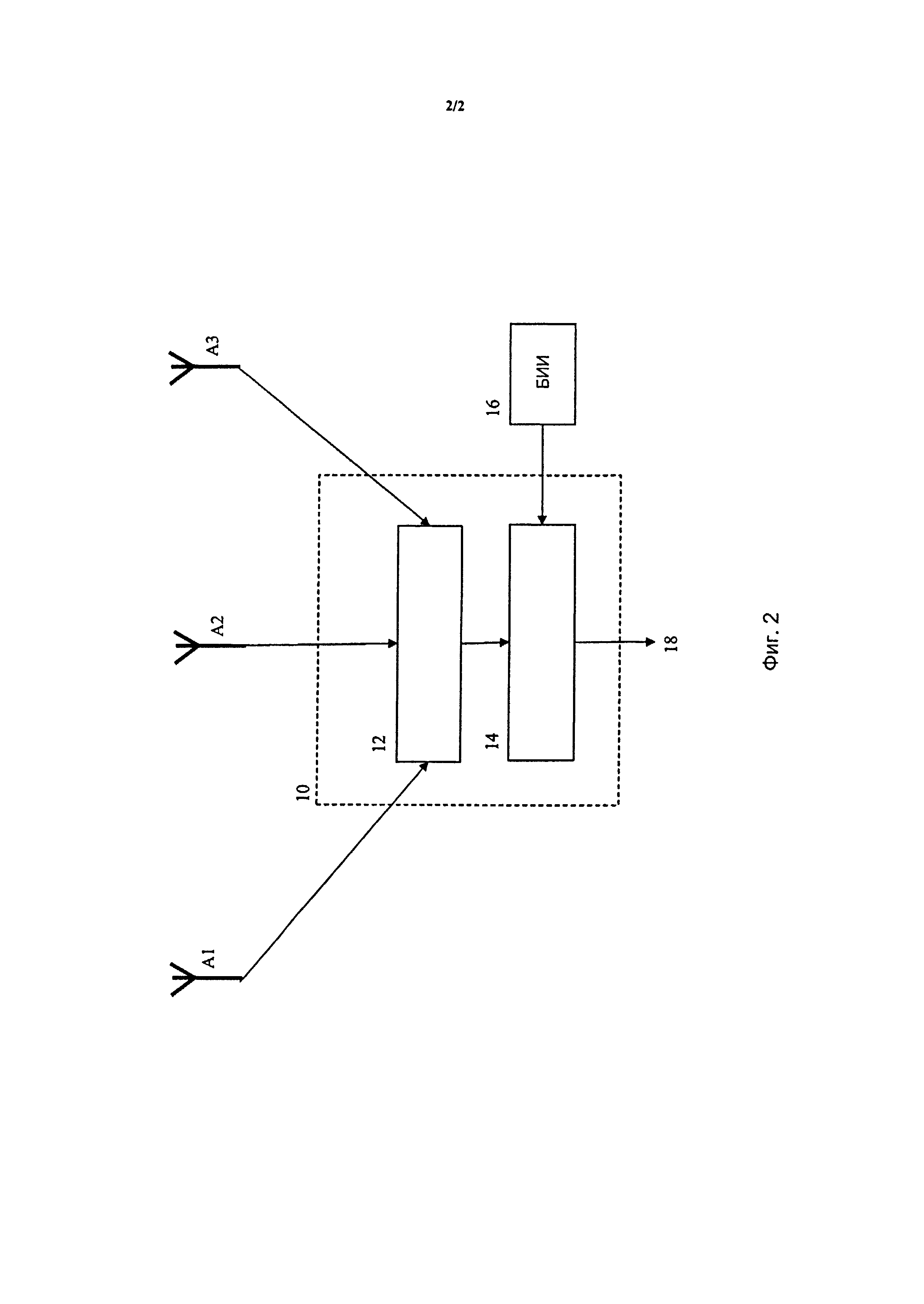
Фиг. 2: вариант осуществления устройства для навигации объекта относительно площадки согласно изобретению.
Описание вариантов осуществления
В дальнейшем функционально сходные или идентичные элементы могут иметь одинаковые ссылочные обозначения. Варианты осуществления настоящего изобретения описываются по отношению к (посадочной) площадке судна (первый объект) и БПЛА (второй объект), приближающемуся к посадочной площадке. Однако изобретение не ограничено этим случаем применения, а может быть применено к любому виду относительной навигации второго объекта по отношению к первому объекту. Связь между объектами осуществляется посредством РЧ (радиочастоты), даже если также возможны и другие средства связи, например технологии оптической связи.
На фиг. 1 показан пример геометрии системы, с которой настоящее изобретение может быть использовано. БПЛА обозначен как Ob, что является начальной точкой каркаса корпуса БПЛА. Кроме того, БПЛА содержит 3 антенны А1-А3 в качестве приемников сигналов определения положения. Расстояния между антеннами А1-А3 и начальной точкой Ob каркаса корпуса обозначены как I1-I3, что является плечами кренящего момента антенн А1-А3 относительно начальной точки Ob. Посадочная площадка для БПЛА на судне обозначена 4 передатчиками Т1-Т4, которые расположены в углах площадки. Начальная точка судна и общей системы координат для относительной навигации обозначена как Os. Положения антенн А1-А3 в общей системе координат обозначены векторами rA,1-rA,3, а положения передатчиков Т1-Т4 обозначены векторами rT,1-rT,4.
Передатчики Т1-Т4 могут быть выполнены в виде транспондеров, которые передают сигналы определения положения при приеме запросных сигналов, передаваемых БПЛА через антенны А1-А3. Передатчики Т1-Т4 также могут быть выполнены в виде псевдоспутников, которые передают свои сигналы определения положения без получения запросного сигнала.
Сигналы определения положения, передаваемые передатчиками Т1-Т4, могут быть аналогичными (сходными) или даже идентичными сигналам ГНСС, таким как сигналы определения положения от системы GPS (Глобальная система навигации и определения положения) или планируемой европейской ГНСС ГАЛИЛЕО. Прежде всего, сигналы определения положения могут быть кодированными мультиплексированными сигналами, содержащими навигационное сообщение с положениями rT,1-rT,4 передатчиков Т1-Т4. Каждый передатчик может иметь свою собственную уникальную кодовую последовательность для кодирования передаваемого сигнала определения положения, так чтобы приемник сигнала определения положения мог определить его передатчик.
Согласно настоящему изобретению относительное положение и ориентация каркаса корпуса БПЛА по отношению к судну оценивается напрямую. Это может быть сделано с помощью фильтра Калмана, фильтра точки сигма или других фильтров (алгоритмов) оценки пространства состояний либо в формулировке полного пространства состояний либо в формулировке пространства состояний ошибки. Применение фильтра Калмана подробно описано в публикации «Stand-Alone Ship-Relative Navigation System Based on Pseudolite Technology»; Aulitzky, C; Heinzinger, O; Bestmann, U; Hecker, P.; AIAA Guidance, Navigation, and Control Conference, 10-13 August 2009, Chicago, Illinois, USA.
Применяемый фильтр или алгоритм оценки пространства состояний может быть реализован либо, по меньшей мере частично, в программном обеспечении, например в компьютерной программе, которая может быть исполнена процессором, либо в аппаратных средствах, например в интегральной схеме, такой как навигационный процессор. Вариант в виде фильтра принимает в качестве ввода измерения расстояния и выводит данные по относительной навигации, которые могут быть обработаны, например, автоматической системой определения положения БПЛА для автоматической посадки БПЛА на площадку судна.
В дальнейшем для иллюстрации идеи изобретения будет рассмотрена формулировка пространства состояний ошибки реализации алгоритма (фильтра) оценки пространства состояний согласно изобретению. Если в распоряжении имеется одно или более измерений расстояния, выполненных, как описано ниже, фильтр оценивает ошибки в предполагаемом относительном положении и ориентации БПЛА. Затем эти оцененные ошибки используются для коррекции предполагаемого относительного положения и ориентации. Подходящее дифференциальное уравнение системы, выполняемое фильтром, дано следующим выражением

где δxs означает три ошибки в относительном положении,  означает три ошибки в относительной ориентации, nω и nx образуют вектор шума системы. Последний требуется для учета изменений в относительном положении и ориентации.
означает три ошибки в относительной ориентации, nω и nx образуют вектор шума системы. Последний требуется для учета изменений в относительном положении и ориентации.
Если имеется блок инерциальных измерений, предполагаемая относительная ориентация может распространяться на стадии предсказания фильтра с использованием измерений БИИ, например гироскопических измерений, что не дает быстрым изменениям ориентации БПЛА вносить вклад в относительную ориентацию, что должно отслеживаться фильтром.
Для оценки относительного положения и ориентации БПЛА измерения расстояния обрабатываются фильтром. Измерение расстояния выполняется для каждого сигнала определения положения, полученного БПЛА от передатчика сигналов определения положения. Измерение расстояния в результате дает псевдорасстояние между передатчиком полученного сигнала определения положения и приемной антенной БПЛА. Измерение расстояния ρij (псевдорасстояние) между передатчиком j и приемной антенной i может быть моделировано следующим образом (верхний индекс «s» означает «ship» («судно») в качестве начальной точки общей системы координат, которая является начальной точкой Os судна):

При этом шум измерения расстояния обозначен как nρij, а положение i-той антенны дано уравнением

где  означает матрицу направляющих косинусов, которая трансформируется от каркаса корпуса БПЛА до каркаса корпуса судна. Эта матрица направляющих косинусов связана с предполагаемой матрицей направляющих косинусов через ошибки в относительной ориентации БПЛА.
означает матрицу направляющих косинусов, которая трансформируется от каркаса корпуса БПЛА до каркаса корпуса судна. Эта матрица направляющих косинусов связана с предполагаемой матрицей направляющих косинусов через ошибки в относительной ориентации БПЛА.
Вышеуказанное уравнение позволяет определять относительное положение rOb каркаса корпуса БПЛА непосредственно по отношению к судну.
Кроме того, описанная выше система и измерительные модели позволяют разработать подходящую реализацию фильтра.
Чтобы учитывать обработку доплеровских измерений, модель системы может быть расширена тремя состояниями ошибки относительной скорости, что приводит к фильтру девяти состояний. Если измерения расстояния и доплеровские измерения смещаются погрешностью тактового генератора БПЛА и погрешностью частоты, соответственно могут быть расширены модели системы и измерительные модели тоже. Подразумевается, что, если известна абсолютная ориентация БПЛА, информация об относительном положении и скорости может быть легко трансформирована, например, в систему координат локального уровня.
На фиг. 2 показано устройство 10 для относительной навигации, которое может быть установлено, например, на борту БПЛА и использоваться для генерирования данных относительной навигации, которые могут быть обработаны для управления автоматической посадкой БПЛА на посадочную площадку судна.
Устройство 10 содержит блок 12 измерения расстояния и средства 14 обработки. Оно получает в качестве ввода сигналы определения положения, принятые антеннами А1-А3, и измерения от БИИ 16. Блок 12 измерения расстояния выполняет для каждого принятого сигнала определения положения измерение расстояния  , чтобы определить псевдорасстояние между передатчиком сигнала определения положения и приемной антенной.
, чтобы определить псевдорасстояние между передатчиком сигнала определения положения и приемной антенной.
Выполненные измерения расстояния передаются блоком измерения расстояния в средства 14 обработки для генерирования данных 18 относительной навигации. Средства 14 обработки содержат фильтр Калмана в качестве алгоритма оценки пространства состояний, реализующего модель системы судна и БПЛА. Фильтр Калмана выполняет вышеуказанные уравнения 1-3 для обработки измерений расстояний и, кроме того, использует измерения, полученные от БИИ 16, для предположения относительной ориентации БПЛА для распространения на стадии предсказания фильтра Калмана. Блок 12 измерения расстояния и/или средства 14 обработки могут быть реализованы в программных или аппаратных средствах.
Настоящее изобретение делает возможной относительную навигацию с использованием измерений расстояния, причем количество неизвестных, подлежащих оценке, не возрастает с количеством антенн, могут быть учтены доплеровские измерения и легко могут быть учтены измерения дополнительных датчиков, таких как БИИ и радиолокационный или лазерный высотомер.
ССЫЛОЧНЫЕ ОБОЗНАЧЕНИЯ И АКРОНИМЫ










Устройство и способ трехмерного позиционирования
Плазменный генератор и способ управления им
Ионный двигатель для космического аппарата
Способ и устройство для улучшения целостности коммуникаций в спутниковой навигационной системе
Беспроводная система передачи локальных сообщений и способ определения местоположения навигационного приемника в пределах беспроводной системы передачи локальных сообщений
Система навигации ближнего поля
Ступень ракеты с жидкостной системой привода
Камера сгорания с повышенным поглощением тепла системой охлаждения
Устройство для удаления вредных газов из атмосферы
Микродвигатель, применяемый прежде всего в качестве двигателя управления положением, двигатель малой тяги, содержащий такие микродвигатели, и способ изготовления микродвигателя
Устройство и способ трехмерного позиционирования
Плазменный генератор и способ управления им
Ионный двигатель для космического аппарата
Способ и устройство для улучшения целостности коммуникаций в спутниковой навигационной системе
Беспроводная система передачи локальных сообщений и способ определения местоположения навигационного приемника в пределах беспроводной системы передачи локальных сообщений
Система навигации ближнего поля
Ступень ракеты с жидкостной системой привода

