Результат интеллектуальной деятельности: РУЧКА УПРАВЛЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к ручке управления для управления воздушным судном.
Уровень техники
Известны самолеты, управление рулями которых осуществляется путем перемещения рычага управления (штурвала), механически соединенного с поворачиваемыми рулями крыльев.
Также известны самолеты, ориентирование рулей которых осуществляется посредством электрических и/или гидравлических приводов, управляемых при помощи датчиков, регистрирующих перемещение рычага. Таким образом, в таких летательных аппаратах рычаг не соединен с рулями механически и пилот не ощущает сопротивления рычага, которое позволяло бы оценить перемещение рулей и величину усилия, воздействующего на них.
Однако некоторые рычаги управления оборудованы активными и/или пассивными устройствами, позволяющими моделировать на рычаге силовую обратную связь.
Кроме того, в некоторых самолетах, оборудованных электронными органами управления полетом, рычаг управления заменен на средства управления, называемые «миништурвалом» или ручкой управления. Такую ручку, более компактную чем классический штурвал, обычно встраивают в подлокотник кресла пилота, при этом она представляет собой рукоятку, которую пилот приводит в действие только движением кисти руки. Установка такой ручки управления позволяет освободить пространство между пилотом и приборной доской для установки в нем другого оборудования.
Ручка управления обычно содержит комплекс пружин, позволяющих создавать возвратное усилие по каждой из осей поворота рукоятки (оси крена и оси тангажа) и возвращать рукоятку в нейтральное положение, когда пилот не прикладывает к ней никакого усилия.
Поскольку манипуляции ручкой управления осуществляются при помощи кисти руки, создаваемые возвратные усилия значительно слабее, чем возвратные усилия, создаваемые в традиционных рычагах управления.
В то же время, чувствительность пилота к поведению рукоятки управления повышается. Таким образом, важно обеспечить возможность создания возвратных усилий в соответствии с точно определенной и стабильной (т.е. воспроизводимой) зависимостью. Однако наличие трения в существующих механизмах приводит к ухудшению поведения ручки управления, ощущаемого пилотом.
В частности, если ручка управления оборудована датчиками усилия, трение, возникающее между элементами ее механизма, приводит к возникновению расхождения и гистерезиса в измерениях, осуществляемых такими датчиками, в результате чего возвратное усилие не может быть сформировано с достаточной точностью.
Помимо затруднений, связанных с трением, известные пассивные устройства часто бывают источником нелинейности упругого усилия и даже взаимозависимости, при которой смещение по одной оси оказывает влияние на другую ось, которая должна быть независимой. Это приводит к снижению точности силовой обратной связи.
Раскрытие изобретения
Одна из задач, на решение которой направлено настоящее изобретение, состоит в предложении ручки управления для управления воздушным судном, которая была бы простой, прочной, исключала бы возможность заклинивания и обеспечивала бы возможность создания возвратных усилий с высокой точностью и стабильностью.
Для решения поставленной задачи в соответствии с изобретением предлагается ручка управления для управления воздушным судном, содержащая
- каркас,
- рукоятку,
- механические средства соединения рукоятки с каркасом, обеспечивающие возможность поворота рукоятки относительно каркаса вокруг первой оси поворота,
при этом механические средства соединения содержат первое шарнирное сочленение, причем первое шарнирное сочленение содержит первую часть, вторую часть, установленную с возможностью движения относительно первой части, и по меньшей мере две гибких пластины, при этом каждая из гибких пластин имеет конец, прикрепленный к первой части, и другой конец, прикрепленный ко второй части, и выполнена упруго деформируемой для обеспечения возможности поворота второй части относительно первой части вокруг первой оси (X) поворота с созданием возвратного момента, направленного на противодействие повороту второй части относительно первой части.
Конструкция шарнирного сочленения, используемого в механических средствах соединения, обеспечивает возможность задания поворота рукоятки без создания трения и, в то же время, с созданием на рукоятке силовой обратной связи.
Кроме того, конструкция сочленения обеспечивает возможность установки датчиков непосредственно внутри сочленений.
Кроме того, обеспечена возможность установки нескольких последовательно расположенных шарнирных сочленений для формирования сложных зависимостей для силовой обратной связи.
Ручка управления по изобретению может дополнительно обладать следующим характеристиками:
- вторая часть первого шарнирного сочленения может быть повернута относительно первой части первого шарнирного сочленения из положения покоя только в первом направлении поворота, причем первое шарнирное сочленение содержит первый упор, выполненный с возможностью исключения отклонения второй части во втором направлении, противоположном первому направлению,
- механические средства соединения содержат первый набор шарнирных сочленений, включающий первое шарнирное сочленение и второе шарнирное сочленение, причем второе шарнирное сочленение содержит первую часть и вторую часть, установленную с возможностью поворота относительно первой части из положения покоя только во втором направлении поворота, причем второе шарнирное сочленение содержит второй упор, выполненный с возможностью исключения отклонения второй части в первом направлении, противоположном второму направлению,
- первый упор выполнен таким образом, что когда первое сочленение находится в положении покоя, пластины первого шарнирного сочленения изогнуты и создают ненулевой возвратный момент, воздействующий на вторую часть первого шарнирного сочленения,
- положение первого упора может быть изменено для обеспечения возможности регулирования величины ненулевого возвратного момента,
- по меньшей мере одно шарнирное сочленение содержит первую пару пластин и вторую пару пластин, причем каждая из пар пластин создает возвратный момент вокруг первой оси поворота,
- первая пара пластин и вторая пара пластин расположены симметрично одна относительно другой,
- по меньшей мере одно шарнирное сочленение дополнительно содержит упругий элемент, соединяющий первую часть со второй частью, причем когда пластины шарнирного сочленения не изогнуты, упругий элемент находится в натяжении между первой частью и второй частью так, что упругий элемент создает возвратное усилие, направленное на поворот второй части относительно первой части,
- механические средства соединения содержат первую цепочку шарнирных сочленений, включающую первое шарнирное сочленение и третье шарнирное сочленение, установленное последовательно с первым шарнирным сочленением, причем первая часть первого сочленения или, соответственно, вторая часть первого сочленения установлена как единое целое со второй частью или, соответственно, с первой частью третьего шарнирного сочленения,
- первое шарнирное сочленение содержит первый упор, выполненный с возможностью ограничения отклонения второй части первого шарнирного сочленения в первом направлении поворота, а третье шарнирное сочленение содержит третий упор, выполненный с возможностью ограничения отклонения первой части третьего шарнирного сочленения в первом направлении поворота, так, что когда рукоятку поворачивают относительно каркаса в первом направлении поворота, первое шарнирное сочленение и третье шарнирное сочленение последовательно приходят к упору,
- положение первого упора и/или третьего упора может быть изменено для обеспечения возможности регулирования величины отклонения, начиная с которого первое шарнирное сочленение и/или третье шарнирное сочленение приходят к упору,
- механические средства соединения содержат датчик напряжения или деформации, установленный на одной из пластин, причем такая пластина представляет собой объект измерений датчика,
- механические средства соединения обеспечивают возможность поворота рукоятки относительно каркаса вокруг второй оси поворота, перпендикулярной первой оси поворота, причем механические средства соединения содержат четвертое шарнирное сочленение, при этом четвертое шарнирное сочленение содержит первую часть, вторую часть, установленную с возможностью движения относительно первой части, и по меньшей мере две гибких пластины, причем каждая из гибких пластин соединяет первую часть со второй частью и выполнена упруго деформируемой для обеспечения возможности поворота второй части относительно первой части вокруг второй оси поворота с созданием возвратного момента, направленного на противодействие повороту второй части относительно первой части,
- механические средства соединения содержат вторую цепочку шарнирных сочленений, включающую четвертое шарнирное сочленение и пятое шарнирное сочленение, установленное последовательно с четвертым шарнирным сочленением, причем первая часть четвертого сочленения или вторая часть четвертого сочленения установлена как единое целое со второй частью или, соответственно, с первой частью пятого шарнирного сочленения.
Краткое описание чертежей
Другие особенности и преимущества настоящего изобретения станут ясны из нижеследующего описания, приведенного исключительно в иллюстративных целях и не накладывающего каких-либо ограничений, содержащего ссылки на прилагаемые чертежи.
На чертежах
- на фиг. 1 схематически представлена ручка управления по первому варианту осуществления изобретения,
- на фиг. 2А и 2В схематически представлено шарнирное сочленение, которое может быть использовано в ручке управления по п. 1 формулы изобретения,
- на фиг. 3А-3С схематически представлены, соответственно, шарнирное сочленение в положении покоя, шарнирное сочленение в нагруженном положении и зависимость изменения момента, создаваемого шарнирным сочленением, от угла поворота вокруг его основной оси,
- на фиг. 4 схематически представлен первый вариант шарнирного сочленения,
- на фиг. 5А и 5В схематически представлены, соответственно, второй вариант шарнирного сочленения и зависимость изменения момента, создаваемого сочленением, от угла поворота,
- на фиг. 6А и 6В схематически представлены, соответственно, третий вариант шарнирного сочленения и зависимость изменения момента, создаваемого сочленением, от угла поворота,
- на фиг. 7А и 7В схематически представлен четвертый вариант шарнирного сочленения,
- на фиг. 8А и 8В схематически представлены, соответственно, сборка из двух последовательно расположенных шарнирных сочленений и зависимость изменения момента, создаваемого такой сборкой, от угла поворота,
- на фиг. 9А схематически представлена ручка управления по первому варианту осуществления изобретения в конфигурации, в которой рукоятка наклонена вокруг первой оси поворота,
- на фиг. 9В схематически представлена ручка управления по первому варианту осуществления изобретения в конфигурации, в которой рукоятка наклонена вокруг второй оси поворота, перпендикулярной первой оси,
- на фиг. 9С и 9D схематически представлены зависимости изменения момента, создаваемого сочленением, от угла поворота вокруг соответственно первой и второй осей,
- на фиг. 10 схематически представлена ручка управления по второму варианту осуществления изобретения,
- на фиг. 11А схематически представлена ручка управления по второму варианту осуществления изобретения в конфигурации, в которой рукоятка наклонена вокруг первой оси поворота,
- на фиг. 11В схематически представлена ручка управления по второму варианту осуществления изобретения в конфигурации, в которой рукоятка наклонена вокруг второй оси поворота, перпендикулярной первой оси,
- на фиг. 11С схематически представлена зависимость изменения момента, создаваемого сочленением, от угла поворота вокруг первой оси или вокруг второй оси.
Осуществление изобретения
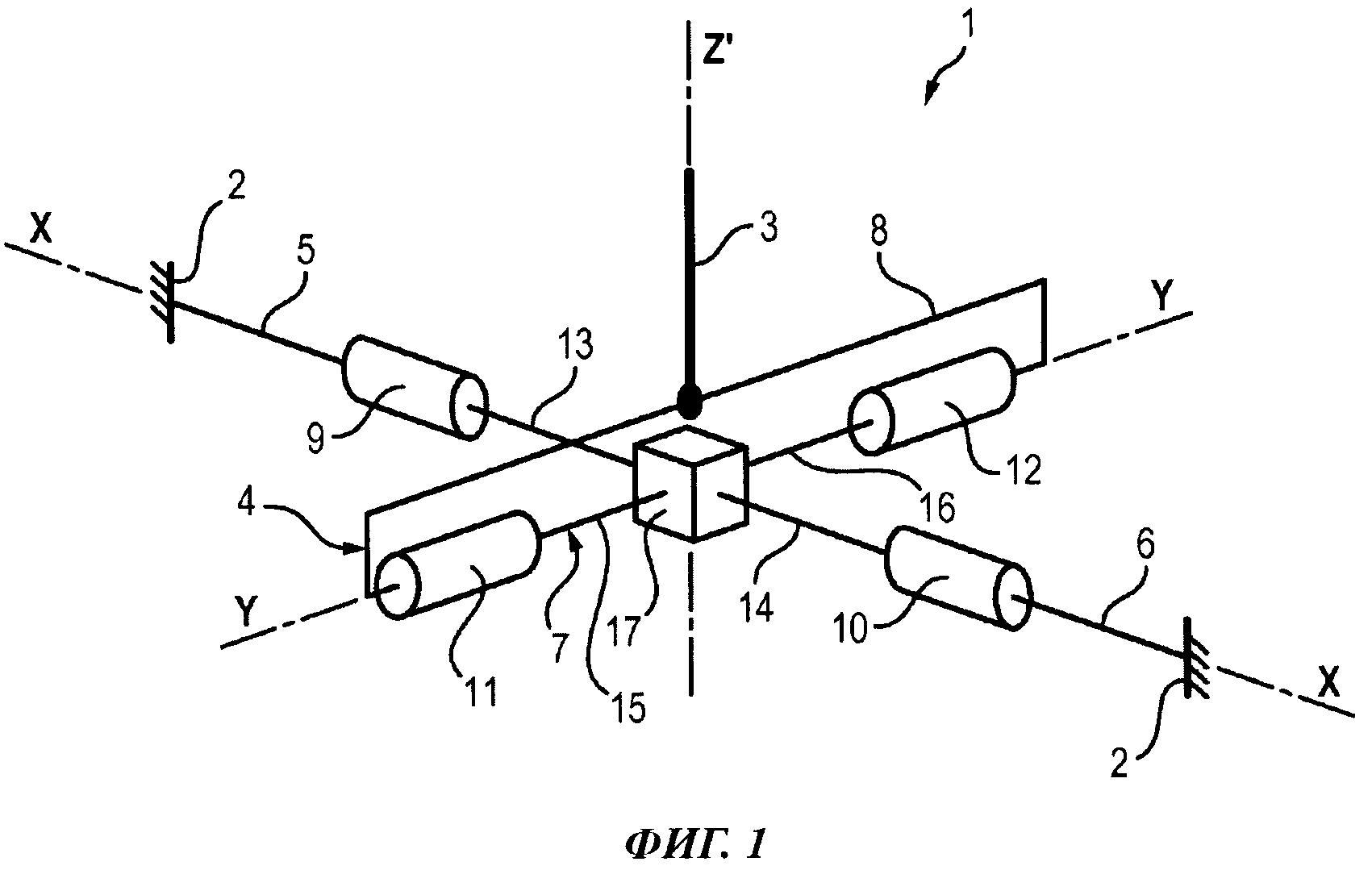
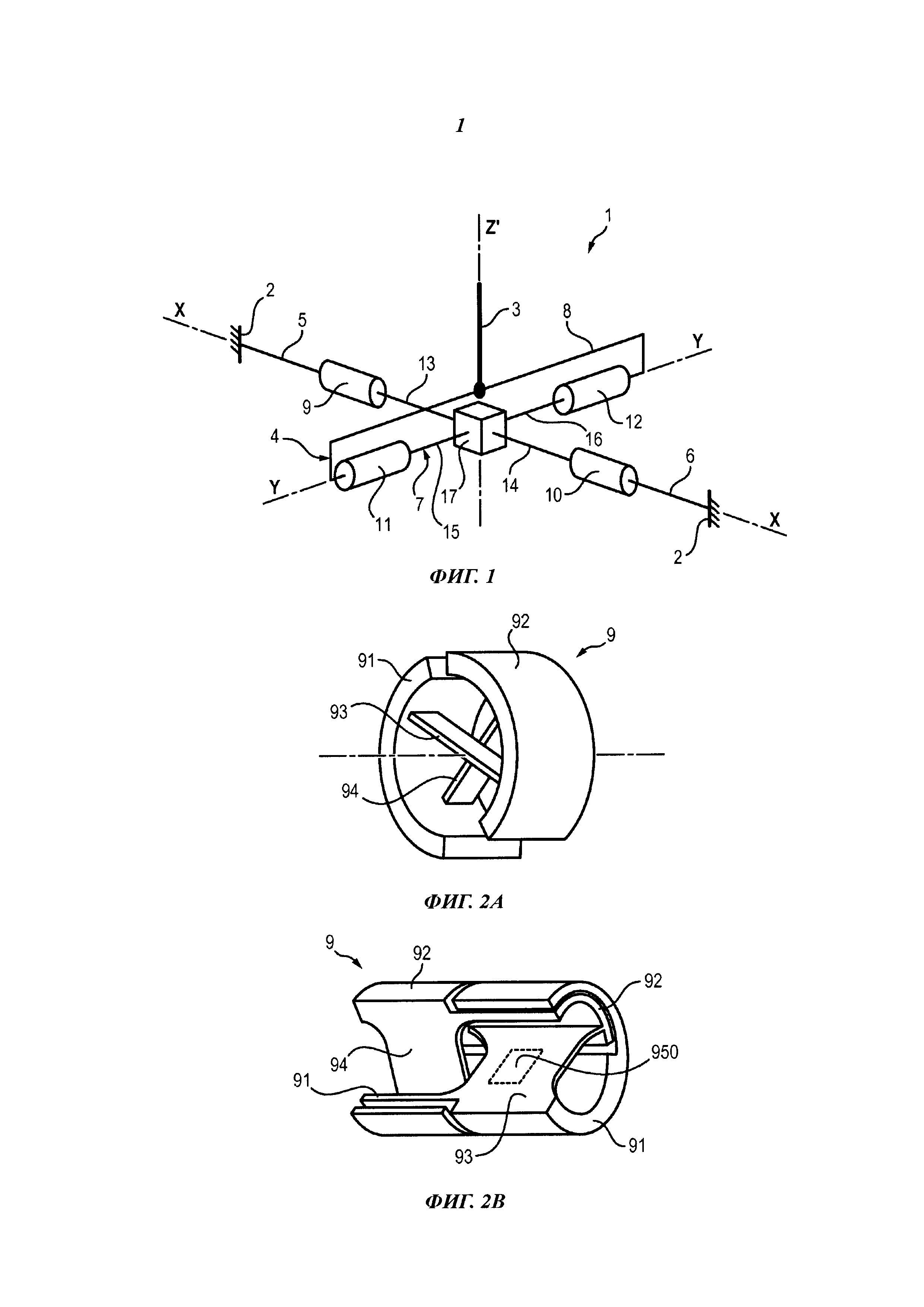
На фиг. 1 схематически представлена ручка управления по первому варианту осуществления изобретения.
Ручка 1 управления содержит каркас 2, например, предназначенный для встраивания в подлокотник кресла пилота, рукоятку 3, установленную с возможностью поворота относительно каркаса 2, и механические средства 4 соединения рукоятки с каркасом, обеспечивающие возможность создания на рукоятке силовой обратной связи по двум осям поворота X и Y.
Рукоятка 3 имеет в целом вытянутую форму вдоль продольного направления (вдоль оси Z').
Механические средства 4 соединения содержат два несущих элемента 5 и 6, установленных неподвижно относительно каркаса 2, промежуточный элемент 7, установленный с возможностью поворота относительно несущих элементов 5 и 6 вокруг первой оси X, и соединительный элемент 8, к которому прикреплена рукоятка 3, причем соединительный элемент 8 установлен с возможностью поворота относительно промежуточного элемента 7 вокруг второй оси Y. Вторая ось Y перпендикулярна первой оси X. Кроме того, когда рукоятка 3 находится в нейтральном положении, оси X, Y и Z' взаимно ортогональны.
Кроме того, механические средства 4 соединения содержат первую пару шарнирных сочленений 9, 10 и вторую пару шарнирных сочленений 11, 12.
Промежуточный элемент 7 имеет крестообразную форму. Точнее, промежуточный элемент 7 содержит четыре плеча 13-16, отходящих от общей точки 17 крепления, причем свободный конец каждого плеча соединен с соответствующим шарнирным сочленением 9-12.
Первая пара шарнирных сочленений содержит первое шарнирное сочленение 9, установленное между несущим элементом 5 и промежуточным элементом 7, и второе шарнирное сочленение 10, установленное параллельно первому шарнирному сочленению 9 между несущим элементом 6 и промежуточным элементом 7. Шарнирные сочленения 9 и 10 обеспечивают возможность поворота промежуточного элемента 7 относительно каркаса 2 вокруг оси X.
Вторая пара шарнирных сочленений содержит третье шарнирное сочленение 11, установленное между промежуточным элементом 7 и соединительным элементом 8, и четвертое шарнирное сочленение 12, установленное параллельно третьему шарнирному сочленению 11 между промежуточным элементом 7 и соединительным элементом 8. Шарнирные сочленения 11 и 12 обеспечивают возможность поворота промежуточного элемента 7 относительно каркаса 2 вокруг оси Y.
Механические средства 4 соединения обеспечивают возможность одновременного поворота рукоятки 3 относительно каркаса 2 вокруг оси X и оси Y, что позволяет пилоту управлять, например, креном и тангажом воздушного судна.
На фиг. 2А и 2В схематически представлено шарнирное сочленение 9, которое может быть использовано в ручке управления по фиг. 1.
Шарнирное сочленение 9 содержит первую часть 91 и вторую часть 92, установленную с возможностью движения относительно первой части 91. Первая часть 91 прикреплена к несущему элементу 5 (т.е. к каркасу 2), а вторая часть 92 прикреплена к промежуточному элементу 7.
Как первая часть 91, так и вторая часть 92 имеют в целом цилиндрическую форму и расположены одна относительно другой так, что их оси поворота совпадают, причем обе части 91 и 92 содержат цилиндрический участок с одинаковым внутренним радиусом, определенным относительно данной общей оси поворота.
Шарнирное сочленение 9 также содержит две гибкие пластины 93 и 94, причем каждая из гибких пластин соединяет первую часть 91 со второй частью 92. Первая пластина 94 из двух гибких пластин расположена параллельно первой плоскости, а вторая пластина 93 расположена параллельно второй плоскости, перпендикулярной первой плоскости.
Первая плоскость и вторая плоскость проходят через общую ось поворота частей 91 и 92.
Каждая из пластин 93 и, соответственно, 94 имеет первый конец, прикрепленный к первой части 91, и второй конец, прикрепленный ко второй части 92. Точнее, каждый из концов пластины 93 и, соответственно, пластины 94 механически соединен с одной из частей 91, 92 жестким соединением или заделан в нее.
Пластины 93, 94 являются упруго деформируемыми при изгибе для обеспечения возможности поворота второй части 92 относительно первой части 91 вокруг оси поворота, соответствующей общей оси вращения частей 91, 92, с созданием возвратного момента, направленного на противодействие повороту второй части 92 относительно первой части 91.
Таким образом, пластины 93 и 94 обеспечивают задание поворота второй части 92 относительно первой части 91 с единственной степенью свободы (поворот вокруг одной оси поворота).
Пластины 93 и 94 подвержены исключительно деформации изгиба, и каждая из пластин может быть использована в качестве объекта измерений для установки датчика 950, который может представлять собой, например, тензометр. Это позволяет получать измерения, непосредственно отражающие величину момента или отклонения, с максимальным приближением к месту деформации и, следовательно, без искажений, связанных с трением или люфтом.
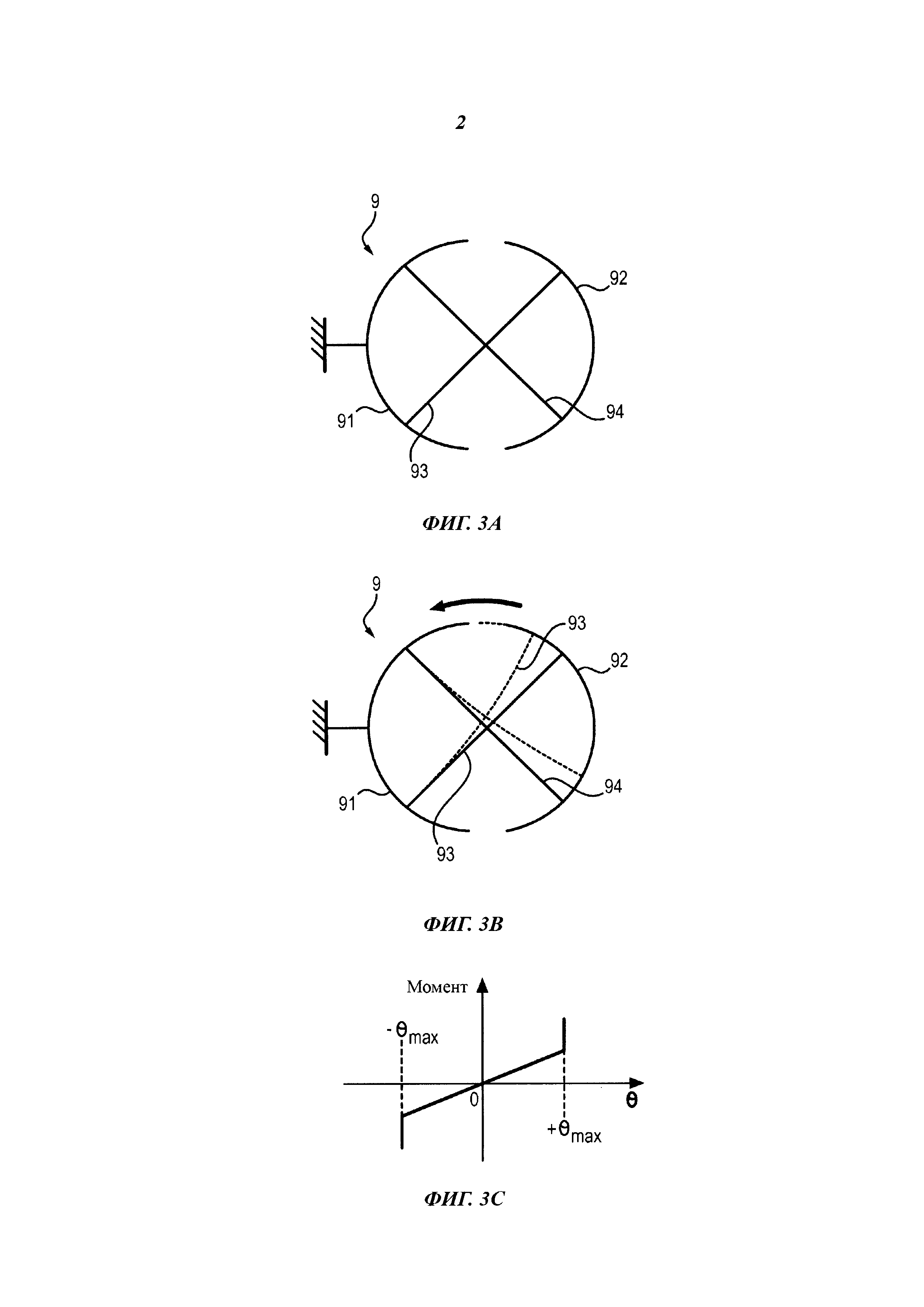
Фиг. 3А-3С схематически иллюстрируют работу шарнирного сочленения 9.
На фиг. 3А шарнирное сочленение 9 представлено в положении покоя. В этом положении гибкие пластины 93, 94 не изогнуты и не создают какого-либо возвратного момента.
В положении по фиг. 3В вторая часть 92 повернута относительно первой части 91. Гибкие пластины 93 и 94 (обозначены пунктиром) изогнуты и вследствие своей упругости создают воздействующий на вторую часть 92 возвратный момент, по существу пропорциональный углу 0 поворота второй части 92 относительно первой части 91.
На фиг. 3С схематически представлена зависимость возвратного момента, создаваемого шарнирным сочленением, от угла 6 поворота. Возвратный момент, создаваемый шарнирным сочленением 9, пропорционален углу 6 поворота при повороте в обоих направлениях в диапазоне углового отклонения, заключенном между значениями -θmax и +θmax. В пределах этого диапазона зависимость линейна и симметрична относительно положения 0 покоя шарнирного сочленения. Максимальные углы -θmax и +θmax поворота соответствуют крайним положениям шарнирного сочленения, в которых вторая часть 92 упирается в первую часть 91.
Конструкция шарнирных сочленений 10-12, представленных на фиг. 1, идентична конструкции шарнирного сочленения 9, описанного выше со ссылками на фиг. 2А, 2В, 3А, 3В и 3С.
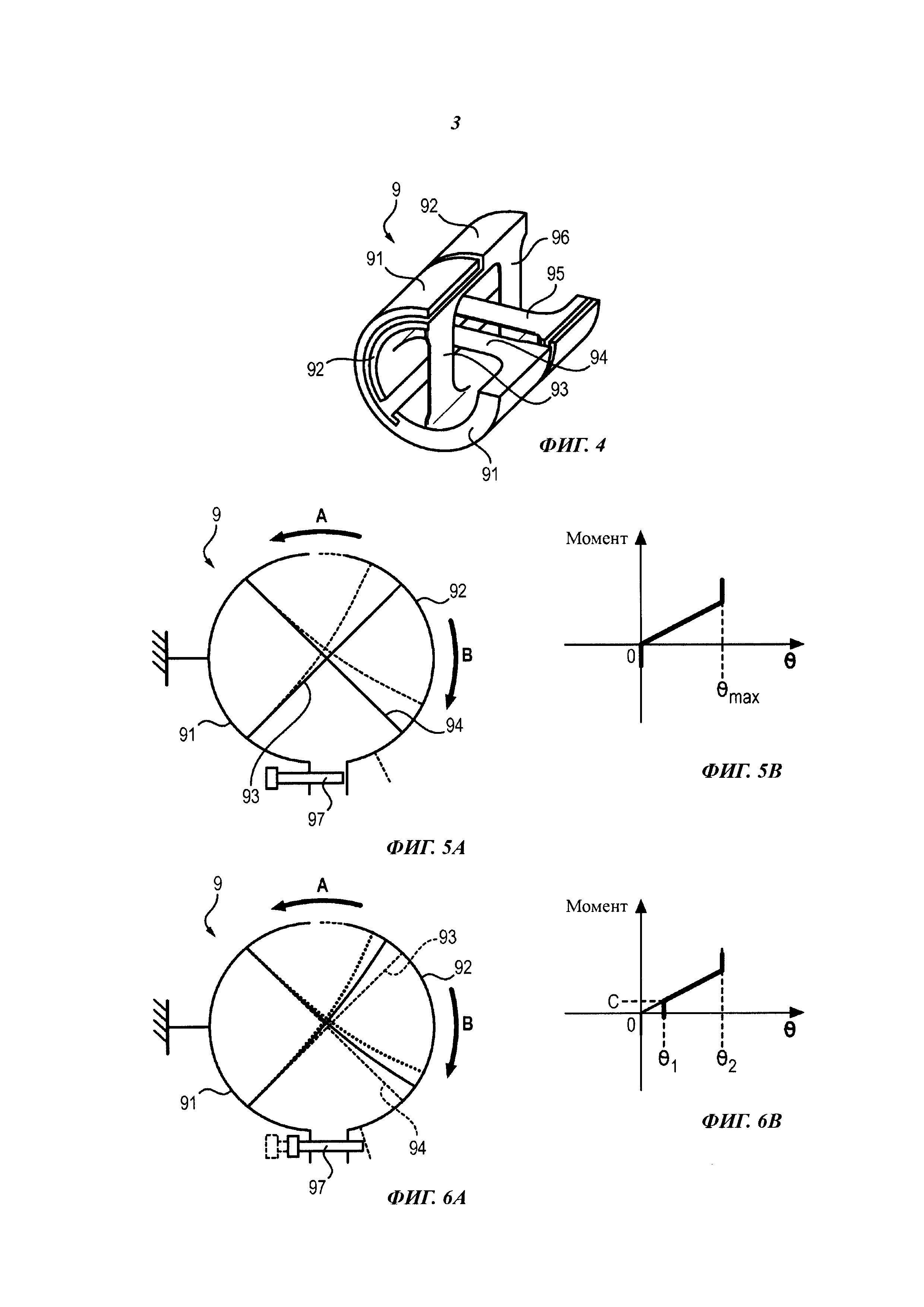
На фиг. 4 схематически представлен первый вариант шарнирного сочленения 9 по фиг. 2А и 2В.
В данном варианте шарнирное сочленение 9 содержит четыре пластины 93-96. В число этих пластин входят первая пара пластин 93, 94 и вторая пара пластин 95, 96, причем пары пластин расположены симметрично одна относительно другой.
Каждая из пар пластин содержит первую пластину 93 (или, соответственно, 96), расположенную параллельно первой плоскости, и вторую пластину 94 (или, соответственно, 95), расположенную параллельно второй плоскости, перпендикулярной первой плоскости.
Первые пластины 93 и 96 (или боковые пластины) расположены по обе стороны от вторых пластин 94 и 95 (или центральных пластин), причем вторые пластины 94 и 95 расположены одна рядом с другой.
Этот первый вариант обеспечивает защиту в случае разрыва одной из пластин. В случае случайного разрыва одной из пластин существует возможность продолжения работы в сокращенном режиме с сохранением функции направления, реализуемой шарнирным соединением, и без потери отклонения, при этом уменьшение функциональной жесткости составляет всего одну четверть (одна пластина из четырех, используемых при повороте в штатном режиме). Пластины должны быть отделены друг от друга вне участков их заделки так, чтобы исключить распространение возможного разрыва одной из пластин на другие пластины.
На фиг. 5А схематически представлен второй вариант шарнирного сочленения 9.
В данном варианте вторая часть 92 шарнирного сочленения 9 может быть повернута относительно первой части 91 шарнирного сочленения из положения покоя (положения, которое сочленение принимает в отсутствие прилагаемых к нему усилий) только в первом направлении поворота (стрелка А). Для этого шарнирное сочленение 9 содержит упор 97, исключающий поворот второй части 92 относительно первой части 91 во втором направлении поворота (стрелка В), противоположном первому направлению.
На фиг. 5В схематически представлена зависимость возвратного момента, создаваемого шарнирным сочленением 9, от угла 6 поворота второй части относительно первой части. Возвратный момент, создаваемый шарнирным сочленением 9, пропорционален углу 6 поворота в первом направлении поворота в диапазоне отклонений от 0 до +θmax. В пределах данного диапазона зависимость линейна.
На фиг. 6А схематически представлен третий вариант шарнирного сочленения 9.
В данном варианте упор 97 выполнен так, что, когда сочленение находится в положении покоя (т.е. к сочленению не приложено никакое усилие), пластины 93, 94 шарнирного сочленения 9 изогнуты и создают ненулевой возвратный момент, воздействующий на вторую часть 92 сочленения и направленный на удержание второй части 92, упертой в упор 97. На фиг. 6В схематически представлена зависимость возвратного момента, создаваемого шарнирным сочленением 9, от угла 9 поворота. Возвратный момент, создаваемый шарнирным сочленением 9, пропорционален углу θ поворота в первом направлении поворота (стрелка А) в диапазоне отклонений, заключенном между значениями +θ1 и +θ2, причем +θ2>+θ1>0. В пределах данного диапазона зависимость линейна. Предельные углы +θ1 и +θ2 поворота определяют соответственно положение, в котором вторая часть 92 прижата к упору 97, и положение, в котором вторая часть 92 прижата к первой части 91 (причем первая часть 91 образует упор для второй части 92).
Положение упора 97 может быть изменено (например, при помощи резьбового элемента) так, чтобы обеспечить регулирование угла +θ1 для корректировки минимального воздействующего момента С.
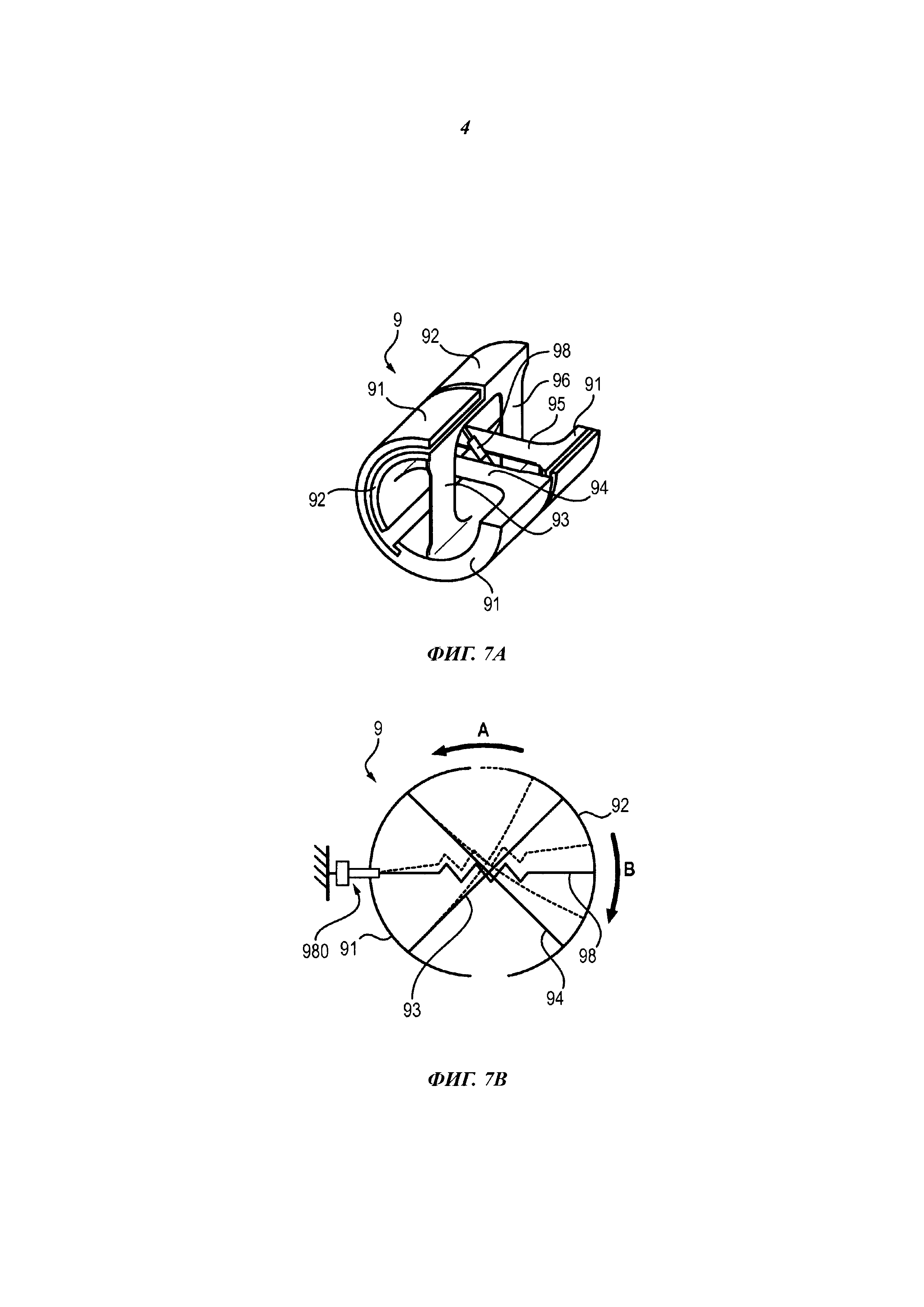
На фиг. 7А схематически представлен четвертый вариант шарнирного сочленения 9.
Описываемый четвертый вариант идентичен второму варианту, но может быть использован в сочетании с любым другим вариантом. В четвертом варианте шарнирное сочленение 9 дополнительно содержит упругий элемент 98, представляющий собой, например, пружину и соединяющий первую часть 91 со второй частью 92. Во всем диапазоне угловых отклонений второй части 92 относительно первой части 91 упругий элемент 98 находится в вытянутом состоянии.
Упругий элемент 98 расположен между центральными пластинами 94, 95 и ориентирован в направлении, составляющем угол в 45 градусов относительно пластин 93, 94, 95 и 96.
Как показано на фиг. 7В, когда пластины 93-96 шарнирного сочленения 9 не изогнуты, упругий элемент 98 проходит через ось поворота второй части 92 относительно первой части 91 так, что хотя упругий элемент 98 находится в натяжении между первой частью 91 и второй частью 92, он не создает момента, воздействующего на них. Другими словами, когда пластины 93-96 не изогнуты, упругий элемент 98 находится в состоянии равновесия и не создает никакого усилия между первой частью 91 и второй частью 92.
При сдвиге второй части 92 относительно первой части 91 в результате поворота упругая сила, создаваемая упругим элементом 98, более не проходит через ось поворота шарнирного сочленения 9 и способствует повороту в направлении, совпадающем с направлением поворота второй части 92 относительно первой части 91.
Благодаря такой конструкции упругий элемент 98 создает отрицательный возвратный момент, по меньшей мере частично компенсирующий положительный возвратный момент, создаваемый пластинами 93-96. Правильный подбор характеристик упругого элемента 98 позволяет создать шарнирное сочленение 9, работающее без трения и обладающее нулевой жесткостью вблизи нейтрального положения.
Кроме того, могут быть предусмотрены средства 980 регулирования натяжения упругого элемента 98 (например, резьбовой элемент, взаимодействующий с первой частью 91), позволяющие корректировать результирующую жесткость шарнирного сочленения 9.
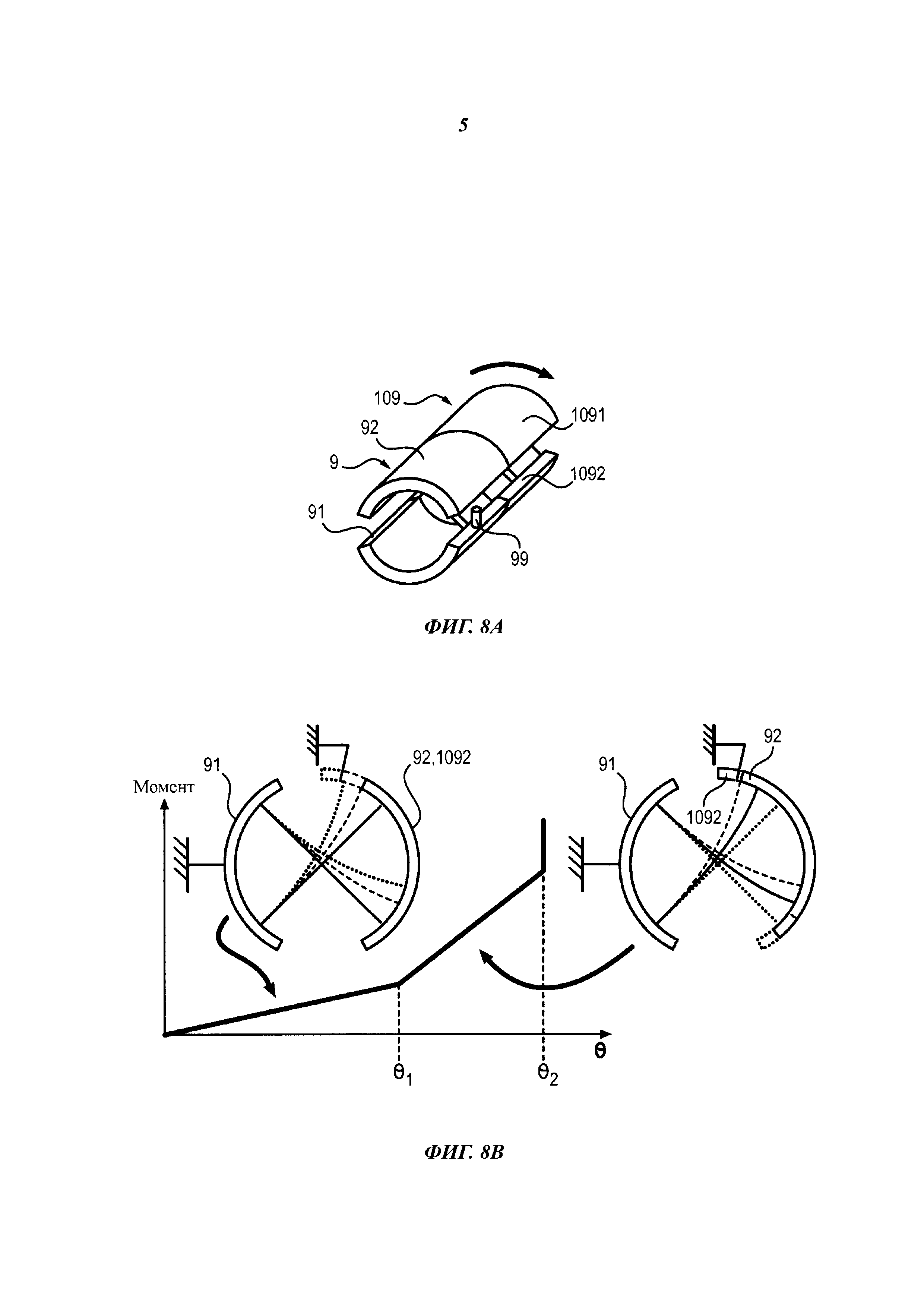
На фиг. 8А схематически представлена сборка из двух последовательно расположенных шарнирных сочленений 9 и 109, предназначенная для формирования цепочки шарнирных сочленений. В данной сборке первая часть 1091 шарнирного сочленения 109 прикреплена ко второй части 92 шарнирного сочленения 9.
Кроме того, в примере, представленном на фиг. 9А, лишь одно из шарнирных сочленений 9 содержит упор 99, ограничивающий отклонение шарнирного сочленения.
Положение упора 99 может быть изменено (например, посредством резьбового элемента, взаимодействующего с первой частью 91 шарнирного сочленения 9) для регулирования угла +θ1 с целью изменения жесткости сборки.
На фиг. 8В схематически представлена зависимость возвратного момента, создаваемого сборкой шарнирных сочленений, от угла 6 поворота второй части 1092 шарнирного сочленения 109 относительно первой части 91 шарнирного сочленения 9.
Полученная зависимость имеет двойной наклон. Точнее, жесткость изменяется по закону, определяемому нескольким участками.
В пределах первого диапазона отклонений, заключенного между 0 и углом θ1, происходит одновременный поворот обоих шарнирных сочленений 9 и 109. Результирующий возвратный момент, создаваемый сборкой шарнирных сочленений 9 и 109, представляет собой комбинацию индивидуальных возвратных моментов, создаваемых шарнирными сочленениями 9 и 109. Такой результирующий возвратный момент пропорционален углу θ поворота второй части 1092 шарнирного сочленения 109 относительно первой части 91 шарнирного сочленения 9, а первая жесткость представляет собой комбинацию индивидуальных жесткостей двух последовательно расположенных шарнирных сочленений 9 и 109.
Когда угол θ поворота достигает значения θ1, вторая часть 92 шарнирного сочленения 9 приходит в соприкосновение с упором 99, что исключает возможность дальнейшего поворота второй части 92 относительно первой части 91.
В пределах второго диапазона отклонений, заключенного между углами θ1 и θ2, возвратный момент, создаваемый сборкой шарнирных сочленений 9 и 109, изменяется в соответствии с линейной зависимостью, а вторая жесткость равна индивидуальной жесткости одного лишь шарнирного сочленения 109.
Когда угол θ поворота достигает значения θ2, вторая часть 1092 шарнирного сочленения 109 приходит в упор с первой частью 1091 шарнирного сочленения 109, что исключает возможность дальнейшего поворота второй части 1092 относительно первой части 1091. Какой-либо поворот сборки на угол, больший θ2, невозможен.
Тот же эффект может быть получен путем сборки последовательно расположенных шарнирных сочленений 9 и 109, имеющих одинаковые угловые отклонения, но разные жесткости. Действительно, при одинаковом угловом отклонении менее жесткое шарнирное сочленение приходит в упор ранее, чем более жесткое шарнирное сочленение. Когда менее жесткое шарнирное сочленение достигает своего упора, результирующая жесткость сборки, исходно бывшая меньшей, чем любое из двух значений жесткости, приобретает значение жесткости более жесткого шарнирного сочленения, еще не достигшего своего упора.
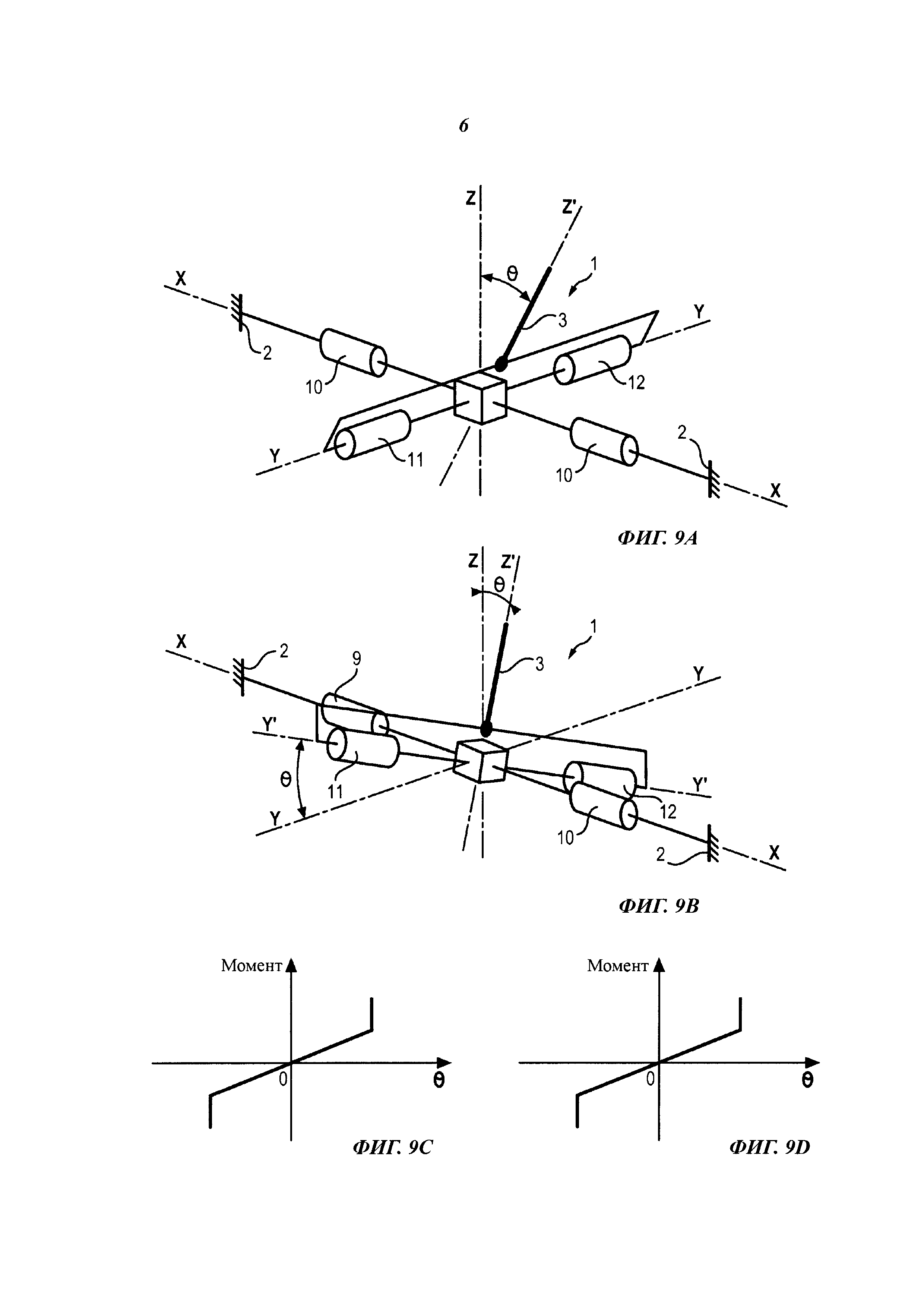
На фиг. 9А схематически представлена ручка 1 управления по первому варианту осуществления изобретения в положении, в котором рукоятка 3 наклонена на угол θ вокруг второй оси Y поворота.
На фиг. 9С схематически представлена зависимость момента, создаваемого двумя сочленениями 11 и 12 на рукоятке 3, от угла θ поворота рукоятки 3 относительно каркаса 2 вокруг оси Y.
На фиг. 9В схематически представлена ручка 1 управления по первому варианту осуществления изобретения в положении, в котором рукоятка 3 наклонена на угол θ вокруг первой оси X поворота.
На фиг. 9D схематически представлена зависимость момента, создаваемого двумя сочленениями 9 и 10 на рукоятке 3, от угла θ поворота рукоятки 3 относительно каркаса 2 вокруг оси X.
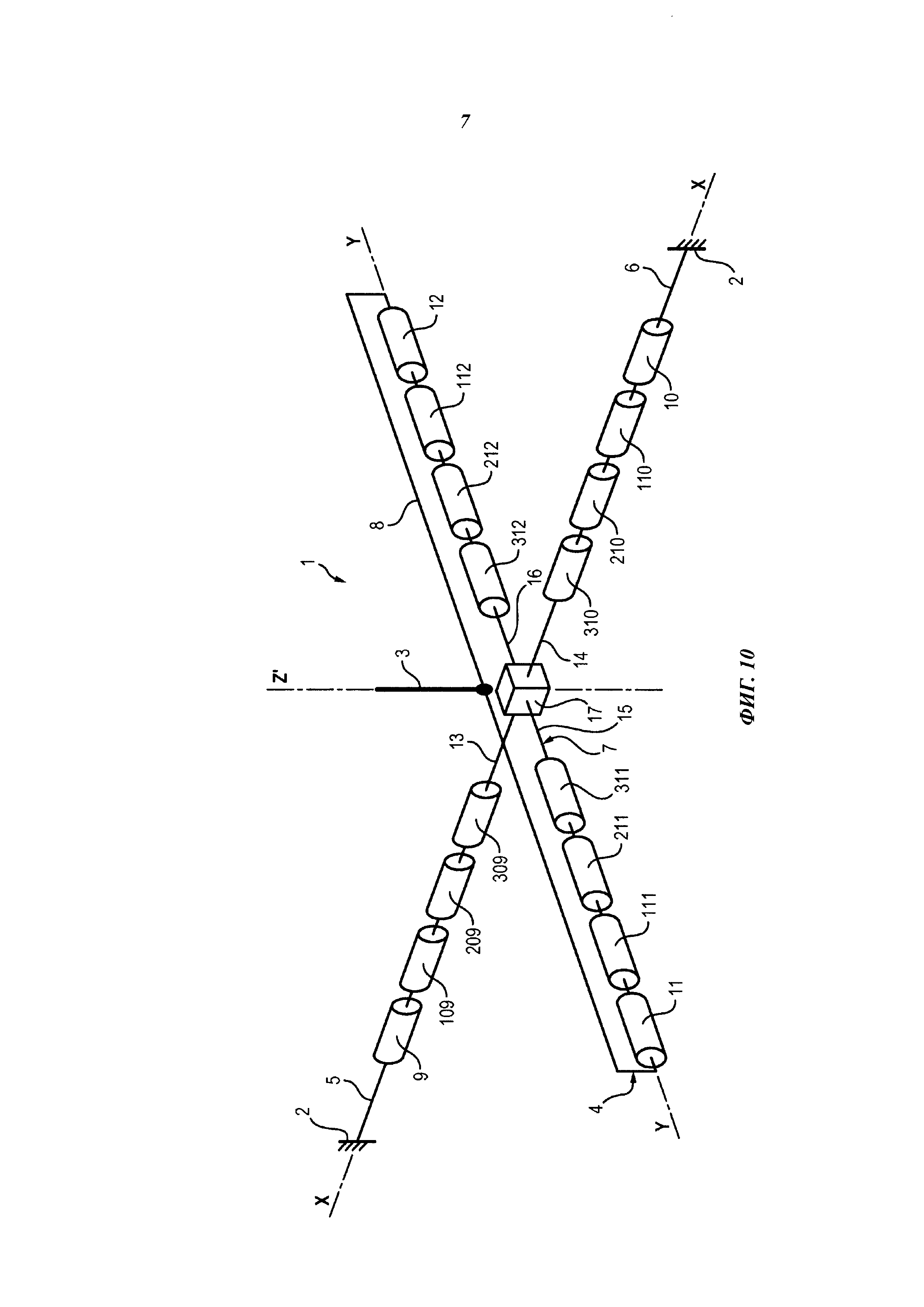
На фиг. 10 схематически представлена ручка 1 управления по второму варианту осуществления изобретения.
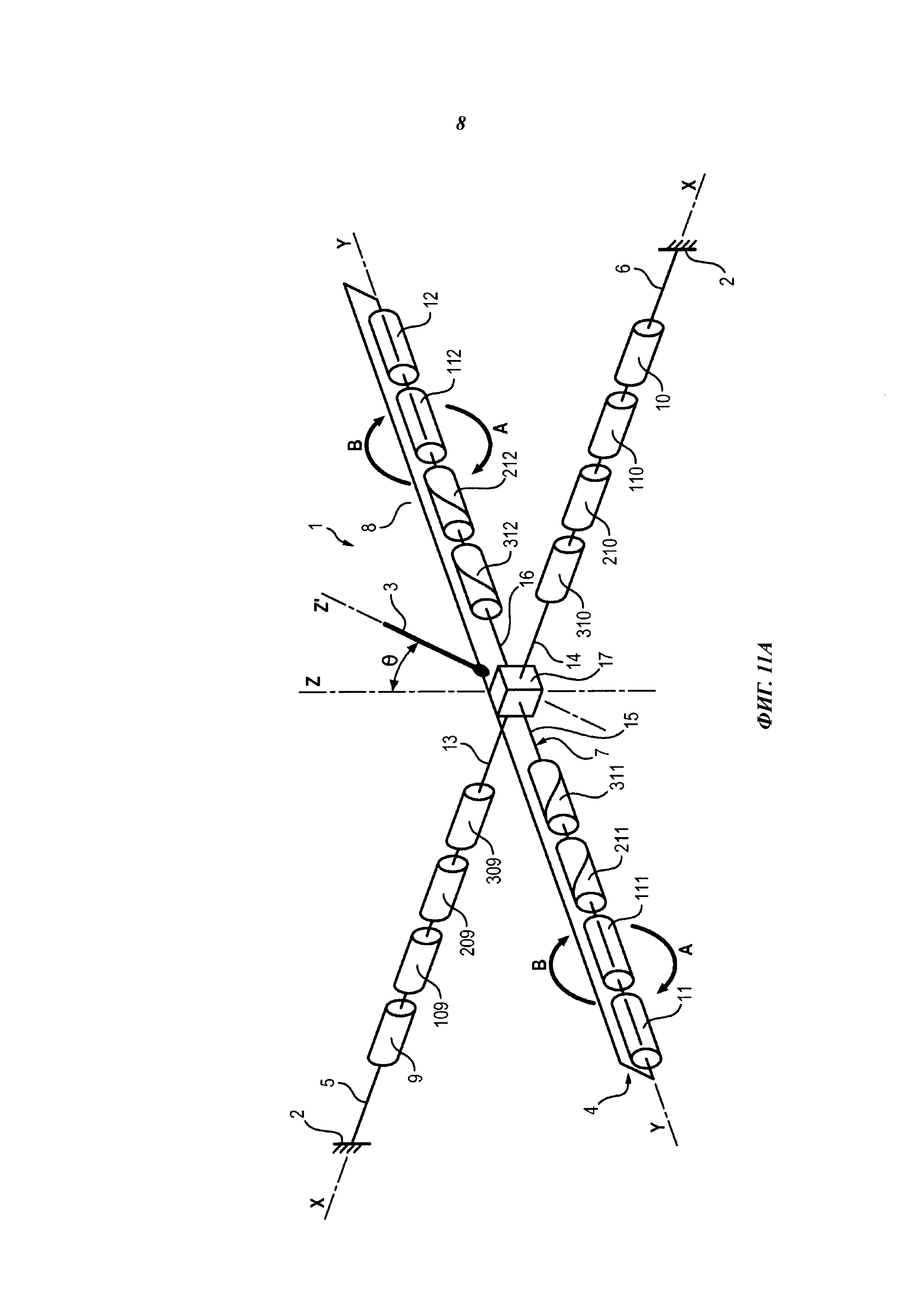
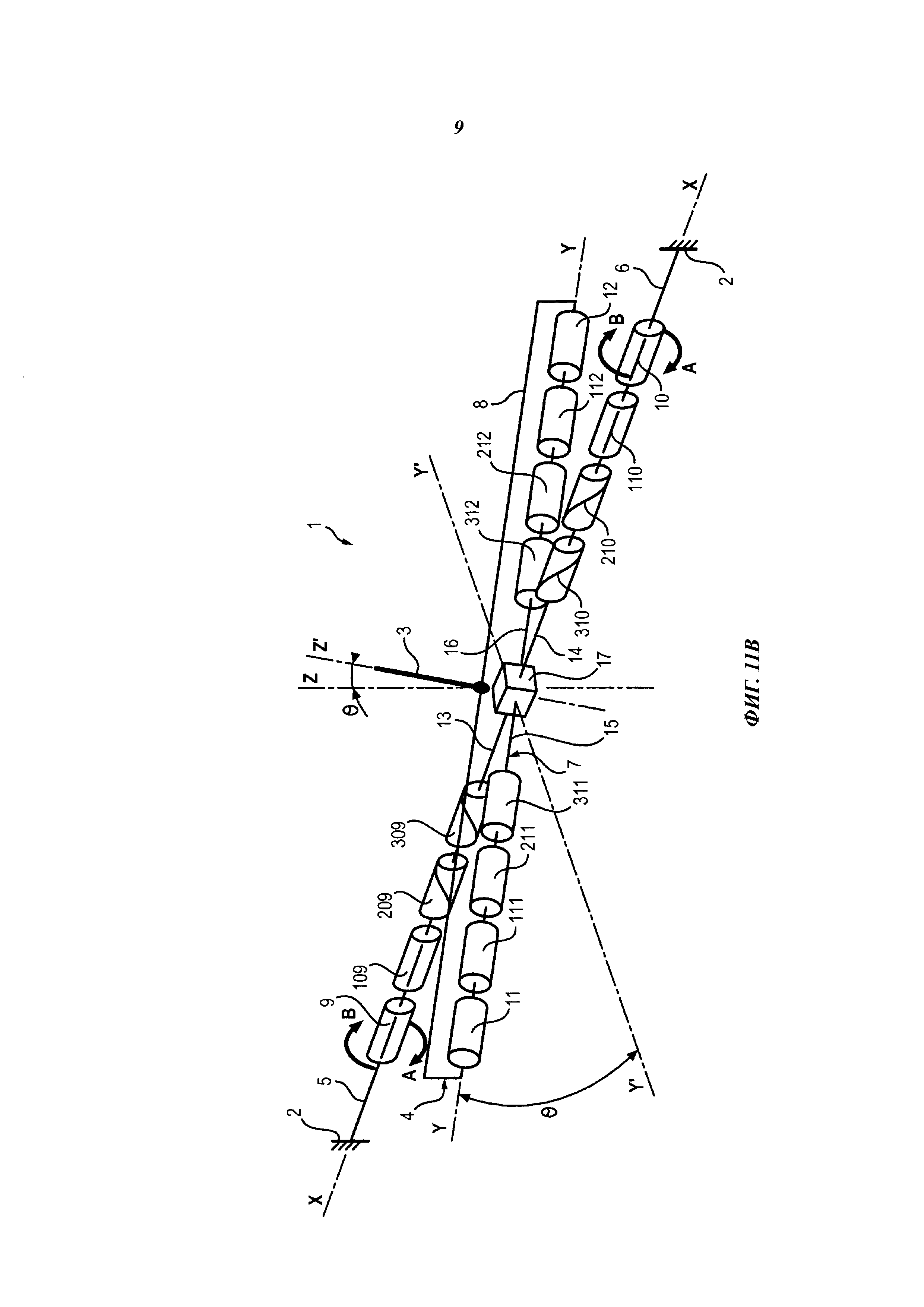
Этот второй вариант осуществления изобретения идентичен первому варианту осуществления изобретения за исключением того, что первое шарнирное сочленение 9 и второе шарнирное сочленение 10 заменены на первую цепочку шарнирных сочленений 9, 109, 209, 309 и вторую цепочку шарнирных сочленений 10, 110, 210, 310, установленных между несущими элементами 2 и промежуточным элементом 7. Аналогичным образом третье шарнирное сочленение 11 и четвертое шарнирное сочленение 12 заменены на третью цепочку шарнирных сочленений 11, 111, 211, 311 и четвертую цепочку шарнирных сочленений 12, 112, 212, 312, установленных между промежуточным элементом 7 и соединительным элементом 8.
В примере, представленном на фиг. 10, каждая из цепочек шарнирных сочленений содержит четыре шарнирных сочленения, установленных последовательно, в число которых входят:
- два шарнирных сочленения, выполненных с возможностью поворота из предварительно напряженного положения только в первом направлении поворота (стрелка А), а именно шарнирные сочленения 9, 109, 10, 110, 11, 111, 12, 112,
- два шарнирных сочленения, выполненных с возможностью поворота из предварительно напряженного положения только во втором направлении поворота (стрелка В), причем второе направление поворота противоположно первому направлению поворота, а именно шарнирные сочленения 209, 309, 210, 310, 211, 311, 212, 312.
Для этого шарнирные сочленения 9, 109, 10, 110, 11, 111, 12, 112 содержат упор 97, аналогичный представленному на фиг. 5А или 6А, исключающий возможность отклонения сочленения во втором направлении поворота.
Аналогичным образом шарнирные сочленения 209, 309, 210, 310, 211, 311, 212, 312 содержат первый упор 97, аналогичный представленному на фиг. 5А или 6А, исключающий возможность отклонения сочленения в первом направлении поворота.
Кроме того, каждое из шарнирных сочленений 9, 10, 11 и 12 содержит второй упор 99, ограничивающий отклонение сочленения в первом направлении поворота, аналогичный представленному на фиг. 8А.
Аналогичным образом каждое из шарнирных сочленений 209, 210, 211 и 212 содержит второй упор 99, ограничивающий отклонение сочленения во втором направлении поворота, аналогичный представленному на фиг. 8А.
На фиг. 11А схематически представлена ручка 1 управления по второму варианту осуществления изобретения в положении, в котором рукоятка 3 наклонена относительно каркаса 2 вокруг второй оси Y поворота.
Как показано на чертеже, когда рукоятка 3 наклонена вокруг оси Y во втором направлении (стрелка В), действуют только шарнирные сочленения 211, 311 и 212, 312. Шарнирные сочленения 11, 111 и 12, 112 находятся в состоянии упора.
Напротив, когда рукоятка 3 наклонена в первом направлении (стрелка А), противоположном второму направлению, действуют только шарнирные сочленения 11, 111 и 12, 112. Шарнирные сочленения 211,311 и 212, 312 находятся в состоянии упора.
На фиг. 11В схематически представлена ручка 1 управления по второму варианту осуществления изобретения в положении, в котором рукоятка 3 наклонена относительно каркаса 2 вокруг первой оси X поворота.
Как показано на чертеже, когда рукоятка 3 наклонена во втором направлении (стрелка В), действуют только шарнирные сочленения 209, 309 и 210, 310. Шарнирные сочленения 9, 109 и 10, 110 находятся в состоянии упора.
Напротив, когда рукоятка 3 наклонена в первом направлении (стрелка А), противоположном первому направлению, действуют только шарнирные сочленения 9, 109 и 10, 110. Шарнирные сочленения 209, 309 и 210, 310 находятся в состоянии упора.
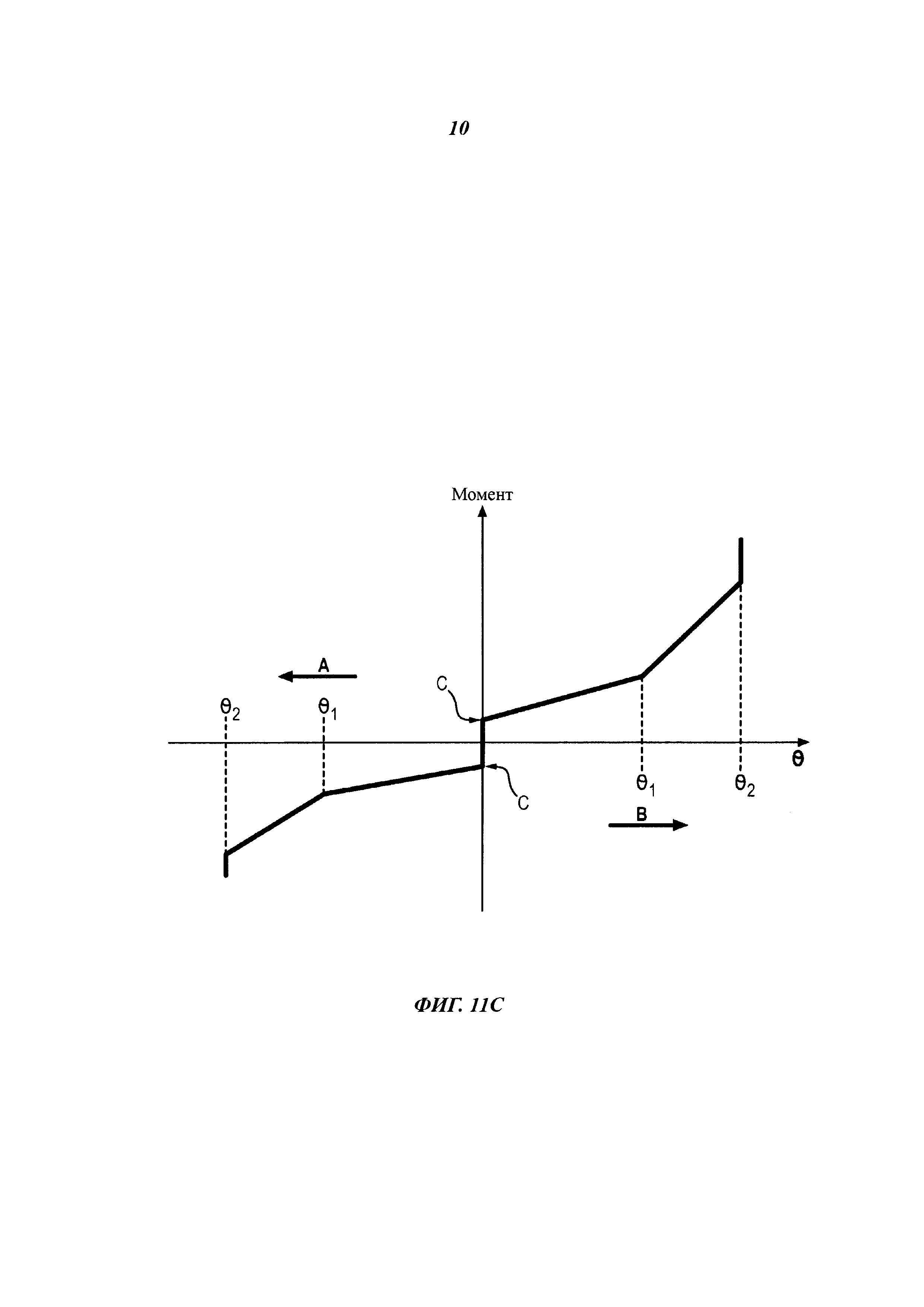
Как показано на фиг. 11С, данный второй вариант осуществления изобретения позволяет получить закон изменения возвратного момента, создаваемого при повороте вокруг двух осей X и Y, содержащий порог срабатывания, т.е. для поворота рукоятки 3 вокруг каждой из осей X и Y пилот должен приложить к рукоятке момент, превышающий пороговое значение С (соответствующее комбинации значений жесткости шарнирных сочленений 9+109, 209+309 и 10+110, 210+310 относительно поворота в обоих направлениях вокруг оси X и комбинации значений жесткости шарнирных сочленений 11+111, 211+311 и 12+112, 212+312 относительно поворота в обоих направлениях вокруг оси Y).
Кроме того, данный закон изменения имеет двойной наклон. Точнее, закон изменения жесткости сборки содержит несколько участков. В пределах первого диапазона отклонений, заключенного между 0 и углом θ1, возвратный момент, создаваемый сборкой шарнирных сочленений, линейно изменяется в зависимости от угла θ с первой жесткостью. В пределах второго диапазона отклонений, заключенного между углами θ1 и θ2, возвратный момент, создаваемый сборкой шарнирных сочленений, линейно изменяется со второй жесткостью (жесткостью шарнирных сочленений 109, 309 и 110, 310 относительно поворота в обоих направлениях вокруг оси X и жесткостью шарнирных сочленений 111, 311 и 112, 312 относительно поворота в обоих направлениях вокруг оси Y).
Таким образом, комбинация нескольких шарнирных сочленений, соединенных последовательно, позволяет создавать сложные законы изменения силовой обратной связи, причем характеристики шарнирных сочленений и конфигурации их сборок могут варьироваться в соответствии с требуемой зависимостью силовой обратной связи.
Ссылочные позиции
1. Ручка управления
2. Каркас
3. Рукоятка
4. Механические средства соединения
5. Несущий элемент
6. Несущий элемент
7. Промежуточный элемент
8. Соединительный элемент
9. Первое шарнирное сочленение (первая ось)
10. Второе шарнирное сочленение (первая ось)
11. Третье шарнирное сочленение (вторая ось)
12. Четвертое шарнирное сочленение (вторая ось)
13. Плечо промежуточного элемента
14. Плечо промежуточного элемента
15. Плечо промежуточного элемента
16. Плечо промежуточного элемента
17. Общая точка крепления плеч
91. Первая часть шарнирного сочленения
92. Вторая часть шарнирного сочленения
93. Первая гибкая пластина
94. Вторая гибкая пластина
95. Вторая гибкая пластина второй пары пластин
96. Первая гибкая пластина второй пары пластин
97. Упор
98. Упругий элемент
99. Упор
109. Шарнирное сочленение (первая ось, направление А, первый и второй наклоны)
110. Шарнирное сочленение (первая ось, направление А, первый и второй наклоны)
111. Шарнирное сочленение (вторая ось, направление А, первый и второй наклоны)
112. Шарнирное сочленение (вторая ось, направление А, первый и второй наклоны)
209. Шарнирное сочленение (первая ось, направление В, первый наклон)
210. Шарнирное сочленение (первая ось, направление В, первый наклон)
211. Шарнирное сочленение (вторая ось, направление В, первый наклон)
212. Шарнирное сочленение (вторая ось, направление В, первый наклон)
309. Шарнирное сочленение (первая ось, направление В, первый и второй наклоны)
310. Шарнирное сочленение (первая ось, направление В, первый и второй наклоны)
311. Шарнирное сочленение (вторая ось, направление В, первый и второй наклоны)
312. Шарнирное сочленение (вторая ось, направление В, первый и второй наклоны)
950. Датчик
980. Средства регулирования натяжения
1091. Первая часть шарнирного сочленения
1092. Вторая часть шарнирного сочленения
Способ управления навигационной системой и навигационная система
Способ определения ошибки в контуре слежения псевдослучайного кода и приемник спутниковой системы позиционирования
Способ определения навигационных параметров для носителя и устройство гибридизации
Способ определения навигационных параметров носителя и устройство гибридизации, связанное с банком фильтров калмана
Способ и система для гироскопических измерений с использованием вибрационного гироскопа
Датчик углового положения и узел, содержащий вращающуюся систему и такой датчик
Предмет экипировки с баллистической защитой и функцией переноски дополнительного снаряжения
Вибрационный гироскоп и способ его изготовления
Способ и система для определения границ защиты с полной экстраполяцией на протяжении заданного временного горизонта
Способ и устройство для обнаружения и исключения множественных отказов спутников системы гнсс
Способ управления навигационной системой и навигационная система
Способ определения ошибки в контуре слежения псевдослучайного кода и приемник спутниковой системы позиционирования
Способ определения навигационных параметров для носителя и устройство гибридизации
Способ определения навигационных параметров носителя и устройство гибридизации, связанное с банком фильтров калмана
Способ и система для гироскопических измерений с использованием вибрационного гироскопа
Датчик углового положения и узел, содержащий вращающуюся систему и такой датчик
Предмет экипировки с баллистической защитой и функцией переноски дополнительного снаряжения
Вибрационный гироскоп и способ его изготовления
Способ и система для определения границ защиты с полной экстраполяцией на протяжении заданного временного горизонта
Способ и устройство для обнаружения и исключения множественных отказов спутников системы гнсс

