Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ НОСИТЕЛЯ И УСТРОЙСТВО ГИБРИДИЗАЦИИ, СВЯЗАННОЕ С БАНКОМ ФИЛЬТРОВ КАЛМАНА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области носителей, одновременно использующих информацию, получаемую от инерциального блока, и информацию, получаемую от системы спутниковой навигации, например системы GPS.
Изобретение касается способа и устройства для гибридизации и, в частности, обнаружения неисправностей спутников и корректировки влияния таких неисправностей.
Уровень техники
Носители, такие как воздушные или морские суда, оборудуют многочисленными системами навигации. В число таких систем входит, в частности, гибридное оборудование типа INS/GNSS (от английского «lnertial Navigation System» (инерциальная навигационная система) и «Global Navigation Satellite System» (глобальная система спутниковой навигации)).
Инерциальный блок выдает информацию с низким уровнем шума и высокой кратковременной точностью. Однако в течение длительных промежутков времени происходит ухудшение качества определения положения инерциальным блоком (более или менее быстрое в зависимости от качества датчиков, например акселерометров или гироскопов, и способов обработки данных, используемых в инерциальном блоке). В свою очередь, информация, получаемая от систем спутниковой навигации, крайне мало подвержена ухудшению качества в течение длительных промежутков времени, но зачастую содержит высокий уровень шума и обладает переменной степенью точности. Кроме того, данные инерциальных измерений доступны всегда, в то время как информация GNSS может быть недоступна либо содержать ошибки и искажения.
Гибридизация состоит в сочетании информации, выдаваемой инерциальным блоком, с измерениями, получаемыми от системы спутниковой навигации, с целью получения информации о положении и скорости с использованием преимуществ обеих систем. Таким образом, точность данных измерений, получаемых приемником GNSS, позволяет компенсировать дрейф инерциальной системы, а результаты инерциальных измерений, содержащие более низкий уровень шумов, позволяют отфильтровывать шумы в измерениях приемника GNSS.
Современные системы навигации рассчитывают защитный объем вокруг вычисленного положения, включающий ошибку определения истинного местоположения в соответствии с заданным уровнем риска для целостности, что определяет степень целостности системы.
В случае воздушного судна такой защитный объем имеет форму цилиндра, расположенного вертикально относительно поверхности Земли. Такой цилиндр определен радиусом и высотой, которые называют, соответственно, горизонтальным пределом защиты (Horizontal Protection Limit - HPL) и вертикальным пределом защиты (Vertical Protection Limit - VPL).
В соответствии с известными решениями величины HPL и VPL определяют, например, при помощи набора фильтров Калмана, который обеспечивает защиту от возможной неисправности спутника.
Такие фильтры обеспечивают гибридизацию между информацией, поступающей от системы спутниковой навигации, и информацией, поступающей от инерциального блока. Один из фильтров набора фильтров, называемый основным (первичным) фильтром, использует все измерения GNSS, состоящие из псевдоизмерений и информации об их качестве. Другие фильтры набора фильтров, называемые вспомогательными (вторичными), используют лишь часть имеющихся измерений GNSS. В случае возникновения неисправности на уровне спутниковых измерений оно не влияет на вспомогательный фильтр, который не получает данного измерения: таким образом, «загрязнения» указанного вспомогательного фильтра не происходит.
Каждый из фильтров формирует гибридное навигационное решение, а также защитные радиусы (горизонтальный и вертикальный), соответствующие данному решению и вычисляемые, например, по ковариации, связанной с погрешностью положения, которую оценивает фильтр. Затем по защитным пределам, которые соответствуют решениям, сформированным каждым фильтром из набора фильтров, определяют пределы защиты HPL и VPL вокруг истинного положения.
Использование такого набора фильтров Калмана было предложено в патентном документе US7219013. В соответствии с данным документом, защитные радиусы вычисляют при помощи способа разделения решений, а для обнаружения и исключения неисправностей спутников используют контроль отклонений от ожидаемого для фильтров Калмана.
Однако такая архитектура не позволяет выявлять неисправности, вызванные малыми дрейфами, что приводит к необходимости дополнительного контроля отклонений от ожидаемого для фильтров так называемым методом наименьших квадратов с использованием только информации GNSS.
Заявитель разработал устройства, использующие такой набор фильтров, один из примеров которых представлен в патентной заявке FR0858726, поданной 17 декабря 2008 г.
Система, предложенная в данной заявке, содержит набор фильтров Калмана, в котором каждый из фильтров связан с модулем корректировки измерений GNSS на входе фильтра в зависимости от сигнала на его выходе. Гибридное навигационное решение получают путем корректировки инерциального состояния в соответствии с сигналами на выходах фильтров, входящих в набор фильтров.
Однако архитектура, предложенная в данном документе, не вполне удовлетворительна. Хотя она обеспечивает возможность обнаружения неисправности и исключения измерений, поступающих со спутника, на котором обнаружена неисправность, она не предлагает никакого решения для оценки влияния неисправности на навигационное решение. Действительно, обнаружение неисправностей основано на моментальной статистической проверке, которую производят только тогда, когда неисправность достигает порога обнаружения. Таким образом, даже в случае выделения неисправного спутника навигационное решение не может быть скорректировано, в результате чего по-прежнему существует остаточная ошибка, порожденная данными, искаженными вследствие неисправности до ее обнаружения. Вследствие этого в случае возникновения неисправности спутника, даже обнаруженной, защитный радиус значительно возрастает.
В патентной заявке ЕР1914561 заявитель описывает способ определения достоверного защитного объема в случае возникновения неисправности спутника.
Предложенный способ основан на выборе подгруппы спутников в составе группировки с учетом гипотезы неисправности для вычисления защитных радиусов каждым фильтром из набора фильтров. Таким образом, риск целостности распределяют между несколькими гипотезами с целью учета возможной неисправности спутника.
Даже в случае определения достоверного защитного объема на него, тем не менее, по-прежнему влияют неисправности спутников, которые приводят к его значительному увеличению. Таким образом, рабочие характеристики такого способа могут быть улучшены.
Кроме того, решения, предложенные в данной области, не позволяют выявлять характер неисправности, в частности различать неисправности типа систематического смещения и неисправности типа линейного изменения, а лишь позволяют выявлять наличие одной из этих неисправностей.
Более того, поскольку не ограничен период обнаружения неисправности, ничто не гарантирует отсутствия в гибридном решении на любой момент времени искажений, вызванных неисправностью, которая будет обнаружена в будущем.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в устранении, по меньшей мере, одного из указанных недостатков и, в частности, в уменьшении защитного радиуса в случае возникновения неисправности спутника.
Для решения поставленной задачи в соответствии с первым аспектом изобретения предлагается способ определения навигационных параметров носителя при помощи устройства гибридизации, содержащего набор (банк) фильтров Калмана, каждый из которых формирует гибридное навигационное решение на основе инерциальных измерений, рассчитанных виртуальной платформой, и необработанных измерений сигналов, переданных группой спутников и полученных от системы спутникового позиционирования (GNSS), включающий этапы, на которых:
определяют для каждого из спутников, по меньшей мере, одно отношение правдоподобия между гипотезой наличия у данного спутника неисправности определенного типа и гипотезой отсутствия у спутника неисправности,
констатируют наличие у спутника неисправности определенного типа на основе отношения правдоподобия, соответствующего неисправности определенного типа, и порогового значения,
оценивают влияние констатированной неисправности на каждое из гибридных навигационных решений, и
корректируют гибридные навигационные решения в соответствии с оценкой влияния констатированной неисправности.
В оптимальном варианте способ по первому аспекту настоящего изобретения обладает следующими характеристиками, которые могут быть осуществлены по отдельности или в любых технически возможных сочетаниях:
для каждого спутника при каждой итерации фильтра Калмана определяют, по меньшей мере, одно отношение правдоподобия в скользящем окне накопления, причем наличие неисправности определенного типа констатируют, если сумма отношений правдоподобия, соответствующих данной неисправности в скользящем окне накопления, превышает соответствующее пороговое значение,
- в случае констатации неисправности способ дополнительно включает этап, на котором исключают необработанные измерения сигналов, переданных спутником, для которого констатирована неисправность,
- способ дополнительно включает этап, на котором проверяют и подтверждают неисправность, включающий проведение статистической проверки отклонений в течение определенного промежутка времени после констатации наличия неисправности, причем каждое отклонение отражает расхождение между наблюдением, соответствующим необработанному измерению, полученному от спутника, для которого неисправность не констатирована, и апостериорной оценкой указанного наблюдения, сформированной фильтром Калмана с использованием необработанных измерений, полученных от всех спутников группировки, причем в случае отрицательного результата такой статистической проверки констатацию наличия у спутника неисправности отменяют,
- способ дополнительно включает этап, на котором для каждого спутника вычисляют перекрестное отклонение и ковариацию перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению, полученному от данного спутника, и апостериорной оценкой указанного наблюдения, сформированной фильтром Калмана, не использующим необработанные измерения, получаемые от данного спутника, причем отношение правдоподобия определяют по перекрестному отклонению и ковариации перекрестного отклонения, получаемым от указанного фильтра Калмана, не использующего необработанные измерения, получаемые от данного спутника, и по оценке влияния неисправности определенного типа на указанное перекрестное отклонение,
- влияние неисправности определенного типа на указанное перекрестное отклонение оценивают путем определения по данным, полученным от указанного фильтра Калмана, не использующего необработанные измерения, получаемые от спутника, динамической матрицы отклонения и оценки амплитуды неисправности определенного типа в скользящем окне оценки, соответствующем определенному числу итераций указанного фильтра Калмана, не использующего необработанные измерения, получаемые от спутника, причем динамическая матрица отклонения связывает амплитуду неисправности с расхождением, порожденным такой неисправностью в перекрестном отклонении,
- заданное число итераций указанного фильтра Калмана соответствует периоду, меньшему заранее определенного периода обнаружения,
- оценку амплитуды неисправности определенного типа производят в скользящем окне оценки путем минимизации методом наименьших квадратов или при помощи фильтра Калмана,
- оценка влияния неисправности на каждое из гибридных навигационных решений включает определение для каждого гибридного навигационного решения по данным, полученным от фильтра Калмана, формирующего данное гибридное навигационное решение, динамической навигационной матрицы и оценку амплитуды и ковариации неисправности определенного типа в скользящем окне оценки, которое соответствует заданному числу итераций указанного фильтра Калмана, формирующего гибридное навигационное решение, причем динамическая навигационная матрица связывает амплитуду неисправности с расхождением, порожденным такой неисправностью в указанном гибридном навигационном решении,
- для каждого из спутников определяют два отношения правдоподобия, причем одно отношение правдоподобия соответствует гипотезе наличия неисправности типа систематического смещения, а второе отношение правдоподобия соответствует гипотезе наличия неисправности типа линейного изменения,
- в случае констатации наличия неисправности типа систематического смещения на этапе констатации этап оценки влияния неисправности на каждое гибридное навигационное решение осуществляют в скользящем окне оценки, начало которого совпадает с моментом констатации наличия неисправности типа систематического смещения,
- в случае констатации наличия неисправности типа линейного изменения этап оценки влияния неисправности на каждое гибридное навигационное решение осуществляют в скользящем окне оценки, которое предшествует моменту констатации наличия неисправности типа линейного изменения, и
- в случае превышения несколькими суммами отношений правдоподобия соответствующих им пороговых значений на этапе констатации констатируют наличие одной неисправности, причем указанная неисправность соответствует наибольшей из сумм отношений правдоподобия.
В соответствии со вторым аспектом изобретения предлагается устройство гибридизации, содержащее виртуальную платформу, выполненную с возможностью вычисления инерциальных измерений, набор фильтров Калмана, каждый из которых предназначен для формирования гибридного навигационного решения на основе инерциальных измерений и необработанных измерений сигналов, переданных группировкой спутников и полученных от системы спутникового позиционирования (GNSS), причем устройство содержит:
- модуль обнаружения, выполненный с возможностью определения для каждого спутника, по меньшей мере, одного отношения правдоподобия между гипотезой наличия у данного спутника неисправности определенного типа и гипотезой отсутствия у спутника неисправности, а также с возможностью констатации наличия неисправности определенного типа на основе отношения правдоподобия, соответствующего неисправности данного типа, и порогового значения,
- модуль адаптации, выполненный с возможностью оценки влияния констатированной неисправности на каждое из гибридных навигационных решений, сформированное фильтром Калмана, а также с возможностью корректировки гибридного навигационного решения в соответствии с оценкой влияния констатированной неисправности.
Решение по изобретению обладает многочисленными преимуществами.
В частности, решение по изобретению позволяет оценивать влияние неисправности на гибридные навигационные решения и устранять такое влияние. Это обеспечивает более точное определение положения.
Решение по изобретению также обеспечивает возможность обнаружения медленно развивающихся дрейфов при помощи статистических проверок в скользящем окне.
Кроме того, решение по изобретению позволяет отличать неисправности типа систематического смещения от неисправностей типа линейного изменения и применять корректировки, соответствующие каждому типу неисправности.
Помимо этого, решение по изобретению способствует обнаружению неисправностей в сроки, меньшие заранее установленного периода обнаружения.
Поскольку каждый из вспомогательных фильтров не использует один из спутников, при возникновении неисправности спутника, один из вспомогательных фильтров не«загрязняется» и сохраняет достоверность навигационного решения.
Гибридное навигационное решение, формируемое каждым фильтром из набора, подвергают коррекции. Это приводит к уменьшению суммарного защитного радиуса.
Краткое описание чертежей
Другие аспекты, задачи и преимущества настоящего изобретения станут ясны из нижеследующего подробного описания предпочтительных вариантов его осуществления, приведенного в виде примера, не накладывающего каких-либо ограничений, со ссылками на прилагаемые чертежи. На чертежах:
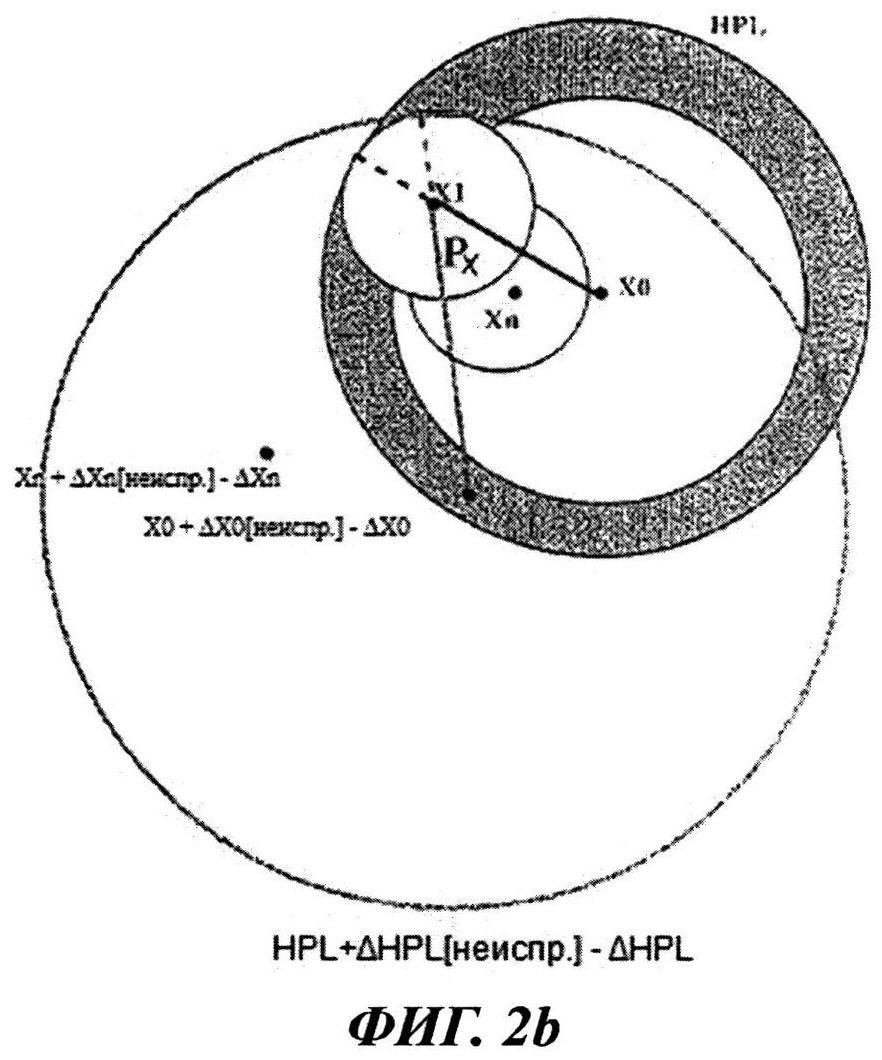
- на фиг.1 представлена схема, иллюстрирующая один из возможных вариантов осуществления устройства по второму аспекту изобретения,
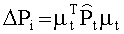
- фиг.2а и 2b схематически иллюстрируют увеличение защитного радиуса в случае неисправности спутника, соответственно, при использовании известного устройства гибридизации и при использовании устройства гибридизации по второму аспекту изобретения.
Осуществление изобретения
На фиг.1 представлено устройство 1 гибридизации в соответствии с одним из возможных вариантов осуществления второго аспекта изобретения, предназначенное для установки в носителе, например, в воздушном судне. Устройство 1 гибридизации использует информацию, получаемую от инерциального блока UMI и от системы GNSS спутниковой навигации, и содержит виртуальную платформу 2 и набор фильтров 3 Калмана.
Виртуальная платформа 2 получает инерциальные приращения, поступающие от датчиков (гироскопов, акселерометров) инерциального блока. Инерциальные приращения соответствуют, в частности, угловым приращениям и приращениям скорости. Данные инерциальной навигации (такие, как значения высоты, скорости или положения носителя) вычисляет виртуальная платформа 2 на основе таких приращений. Такие данные инерциальной навигации в дальнейшем описании обозначены термином «инерциальные измерения PPVI».
Такие инерциальные измерения PPVI передаются в модуль вычисления априорно оцененных псевдорасстояний (не представлен на фиг.1), который также получает данные по положению спутников. Модуль вычисления априорно оцененных псевдорасстояний вычисляет по части инерциальных измерений и данным по положению спутников априорные псевдорасстояния между носителем и спутниками, видимыми носителю.
Устройство 1 гибридизации также получает от системы GNSS спутниковой навигации псевдоизмерения между носителем и различными видимыми спутниками. Затем, в соответствии с известными способами, вычисляют расхождения (называемые наблюдениями) между априорно оцененными псевдоизмерениями и измерениями, полученными от системы GNSS.
Устройство 1 гибридизации дополнительно содержит набор фильтров 3 Калмана, осуществляющий гибридизацию между инерциальными данными, поступающими от инерциального блока, и информацией от системы спутниковой навигации. Помимо выдачи на выход статистической информации по измерениям, фильтр обеспечивает сохранение линейности работы виртуальной платформы 2, модель которой предусмотрена в фильтрах 3 Калмана, каждый из которых оценивает вектор dXO-dXn состояния.
В соответствии с известным способом набор фильтров 3 Калмана содержит несколько фильтров Калмана, установленных параллельно. Один из этих фильтров называют основным фильтром 8 Калмана: он учитывает все наблюдения (получая для этого все измерения, поступающие от системы GNSS) и формирует основное гибридное навигационное решение.
Остальные фильтры 8i, 8n называют вспомогательными фильтрами: каждый из них учитывает лишь часть наблюдений, например n-1 наблюдений из n наблюдений, соответствующих n видимым спутникам, так что i-й вспомогательный фильтр 8i Калмана получает от системы GNSS измерения всех спутников, кроме i-го, и формирует вспомогательное гибридное навигационное решение.
Следует отметить, что вышеописанный процесс формирования наблюдений не является общим для всех фильтров набора фильтров 3, но его осуществляют для каждого из фильтров. Таким образом, вычисление априорных псевдорасстояний и вычисление вышеописанных наблюдений не являются общими для всех фильтров, но устройство 1 гибридизации по изобретению осуществляет такие вычисления для каждого из фильтров набора фильтров 3.
В рамках архитектуры замкнутого контура (архитектуры с обратной связью), представленной на фиг.1, устройство 1 гибридизации формирует гибридный выходной сигнал Xref («базовые навигационные данные»), соответствующий инерциальным измерениям PPVI, рассчитанным виртуальной платформой 2 и скорректированным при помощи вычитающего элемента 7 на вектор dC стабилизации, число компонентов которого соответствует числу компонентов векторов состояния, оцененных фильтром Калмана.
Однако изобретение не ограничено такой архитектурой, но также применимо и к архитектуре открытого контура, в которой вычитающий элемент 7 не используют.
Для выработки гибридных навигационных решений в устройстве 1 предусмотрен набор сумматоров 10, каждый из сумматоров которого установлен на выходе одного из фильтров набора, для сложения векторов dX0-dXn состояния, сформированных фильтрами, с гибридным выходным сигналом Xref.
Следует отметить, что гибридный выходной сигнал Xref предназначен исключительно для внутреннего использования. Таким образом, оптимальное навигационное решение образовано информацией, получаемой на выходе сумматора 10.
Гибридный выходной сигнал Xref может быть возвращен на вход виртуальной платформы 2.
Кроме того, как показано на фиг.1, на вход каждого из фильтров набора фильтров 3 Калмана может быть подан вектор dC стабилизации. Таким образом, путем вычитания из оценок фильтров поправки dC обеспечивают их корректировку и, следовательно, согласованность фильтров с виртуальной платформой 2.
Устройство гибридизации дополнительно содержит модуль 9 формирования вектора dC стабилизации, два варианта осуществления которого представлены ниже в качестве примеров, не накладывающих каких-либо ограничений.
В соответствии с первым из возможных вариантов осуществления поправки, применяемые к инерциальным измерениям, поступают от одного фильтра. Таким образом, все компоненты вектора dC стабилизации равны компонентам вектора состояния, оцененного выбранным фильтром Калмана. Выбор фильтра может быть осуществлен, например, в модуле 4 в соответствии с патентным документом ЕР1801539А, путем обнаружения возможной неисправности спутника.
В соответствии со вторым из возможных вариантов осуществления вектор dC стабилизации формируют покомпонентно, причем для каждой компоненты используют набор фильтров Калмана. При этом модуль 9 формирования поправки dC выполнен с возможностью формирования каждого из компонентов dC[cocT.] вектора dC стабилизации, как функции от всех соответствующих компонентов dX0[cocT.]-dXn[cocT.] векторов dX0-dXn коррекции. Формирование каждого из компонентов может быть осуществлено, например, в соответствии с патентной заявкой FR0858721, поданной заявителем 17 декабря 2008 г.
В соответствии с вариантом осуществления изобретения, представленным на фиг.1, к каждому фильтру подключен модуль 5 коррекции спутниковых измерений, который передает в фильтр измерения (как правило, псевдоизмерения) системы GNSS спутникового позиционирования, используемые фильтром после их коррекции при помощи гибридного навигационного решения, сформированного данным фильтром. Такой модуль 5 коррекции описан в патентной заявке FR0858726, поданной заявителем 17 декабря 2008 г.
В дальнейшем описании неисправным спутником считают спутник, который передает в своих сообщениях ошибочную информацию, порождающую расхождение (постоянное или переменное) между его действительным положением и положением, определенным в его сообщениях.
Устройство 1 гибридизации по изобретению содержит модуль 4 обнаружения и исключения неисправностей спутников, содержащий модуль 41 обнаружения, выполненный с возможностью осуществления этапов, на которых:
для каждого спутника определяют, по меньшей мере, одно отношение Ir, Ir' правдоподобия между гипотезой наличия у данного спутника неисправности определенного типа и гипотезой отсутствия у спутника неисправности,
в соответствии с отношением Ir, Ir' правдоподобия, определенным для неисправности определенного типа, и пороговым значением констатируют наличие у спутника неисправности определенного типа.
В оптимальном варианте для каждого спутника при каждой итерации фильтра Калмана в скользящем окне накопления определяют, по меньшей мере, одно отношение Ir, Ir' правдоподобия, причем наличие неисправности определенного типа констатируют, если сумма отношений Ir, Ir' правдоподобия, соответствующих такой неисправности, в скользящем окне превышает соответствующее пороговое значение.
Отношение правдоподобия соответствует вероятности наличия у соответствующего спутника неисправности определенного типа. Например, если отношение правдоподобия, относящееся к неисправности определенного типа, положительно, вероятность наличия такой неисправности у соответствующего спутника более высока. Чем выше отношение правдоподобия, тем выше вероятность наличия связанной с ним неисправности у соответствующего спутника.
Пороговое значение может быть одним и тем же для нескольких спутников и/или нескольких типов неисправностей; в альтернативном варианте пороговые значения могут быть разными для каждого спутника и каждого типа неисправности, причем в последнем случае каждое отношение правдоподобия или, в оптимальном варианте, каждую сумму отношений правдоподобия, сравнивают с соответствующими им пороговыми значениями.
Размер скользящего окна накопления может варьироваться в зависимости от типа неисправности; также может быть установлен единый размер скользящего окна.
Как будет подробно описано ниже, модуль 4 обнаружения и исключения неисправностей спутников также выполняет функцию обработки и исключения измерений GNSS с целью их контроля.
В варианте осуществления изобретения, представленном на фиг.1, модуль 4 обнаружения и исключения дополнительно содержит модуль 42 обработки спутниковых сигналов, который принимает измерения GNSS и направляет полученную информацию в набор фильтров 3 Калмана в соответствии с текущей ситуацией (неисправные спутники не обнаружены; исключение данных спутника, в котором обнаружена неисправность).
Устройство гибридизации в соответствии со вторым аспектом изобретения дополнительно содержит модуль 5 адаптации, выполненный с возможностью выполнения этапов, на которых:
оценивают влияние неисправности на гибридное навигационное решение, сформированное каждым из фильтров Калмана, и
в случае констатации наличия неисправности корректируют гибридное навигационное решение в соответствии с полученной оценкой влияния неисправности.
Модуль 5 адаптации также выполняет функцию оценки расхождений ΔХ, ΔXi, …, ΔXn, порожденных неисправностью в гибридных навигационных решениях, сформированных фильтрами 8, 8i, …, 8n Калмана, и корректировки гибридных навигационных решений, например, при помощи набора вычитающих элементов 6. Однако настоящее изобретение не ограничено данной архитектурой, и оценка влияния неисправности на гибридное навигационное решение может быть произведена другими средствами, например фильтрами Калмана, модулем 41 обнаружения или же любыми другими соответствующими средствами, известными специалистам в данной области.
Ниже следует описание способов вычислений, разработанных заявителем для определения отношений правдоподобия и влияния неисправностей на гибридные навигационные решения. Данные формулы приведены в виде примера и не накладывают каких-либо ограничений на изобретение.
В оптимальном варианте отношения правдоподобия определяют по данным, получаемым от фильтров Калмана, которые содержат, в частности, отклонения и ковариации отклонения, а также по оценке влияния неисправности определенного типа на отклонения.
Отклонением называют расхождение между априорным наблюдением, поступившим в фильтр Калмана, и апостериорной оценкой такого наблюдения, сформированной фильтром.
Таким образом, каждый фильтр формирует n отклонений, по числу спутников в группировке.
В частности, «перекрестным отклонением» называют отклонение, сформированное каждым из вспомогательных фильтров 8i Калмана и представляющее собой расхождение между априорным наблюдением, полученным от спутника, от которого данный вспомогательный фильтр 8i не получает информации, и апостериорной оценкой данного наблюдения.
Таким образом, набор фильтров Калмана вырабатывает n∗(n+1) отклонений, n из которых представляют собой перекрестные отклонения.
В оптимальном варианте модуль 4 обнаружения и исключения неисправностей спутников содержит модуль 40 отбора отклонений, выполненный с возможностью отбора отклонений (как перекрестных, так и не перекрестных) и ковариации отклонений с последующем направлением их в модуль 41.
В оптимальном варианте модуль 40 выполнен с возможностью передачи перекрестных отклонений или обычных отклонений модулю 41 для вычисления отношений правдоподобия. Преимущество использования перекрестных отклонений по сравнению с контролем обычных отклонений состоит в том, что фильтр, который осуществляет проверку неисправного спутника, сам не испытывает влияния данной неисправности.
А именно, i-й вспомогательный фильтр 8i Калмана получает от системы GNSS измерения всех спутников кроме i-го и, таким образом, формирует вектор dXi состояния независимо от спутника i, так что данный фильтр 8i не испытывает влияния возможной неисправности спутника i.
Перекрестное отклонение спутника может соответствовать, например, расхождению между псевдорасстоянием до данного спутника, определенным системой спутниковой навигации, и апостериорной оценкой такого псевдорасстояния, выработанной фильтром Калмана, который не использует псевдорасстояние, предоставленное данным спутником, что обеспечивает независимость такой оценки от данного спутника. Таким образом, неисправность, в частности, медленно развивающаяся, данного спутника не оказывает влияния на вычисление отношения правдоподобия.
Следует уточнить, что в общем случае определение перекрестных отклонений может быть применено к любым необработанным измерениям, в частности к измерениям псевдоскорости (также называемым допплеровскими измерениями).
Отношение lr правдоподобия, связанное с неисправностью определенного типа, для некоторого момента t предпочтительно определяют по следующей формуле:

где:
εt - вектор отклонения (обычного или, в оптимальном варианте, перекрестного) фильтра 8i Калмана в момент t,
St - ковариация отклонений в момент t,
ρt- расхождение, вызванное неисправностью в векторе отклонения в момент t.
Символ T обозначает транспонирование матрицы или вектора-стобца. Величина рt неизвестна, но ее можно оценить в скользящем окне оценки. В предпочтительном варианте одновременно с этим оценивают порожденное неисправностью расхождение гибридного навигационного решения, сформированного указанным фильтром Калмана, обозначенное в дальнейшем описании символом βt. Для получения данных оценок могут быть использованы следующие формулы:

где:
 - оценка амплитуды неисправности,
- оценка амплитуды неисправности,
φt - динамическая матрица отклонения, связывающая амплитуду неисправности и расхождение, порожденное неисправностью в отклонении, и
µt - динамическая навигационная матрица, связывающая амплитуду неисправности и расхождение, порожденное неисправностью в гибридном навигационном решении.
В оптимальном варианте обе динамические матрицы для момента t вычисляет модуль 41 обнаружения на основе данных, полученных от указанного фильтра Калмана, предпочтительно перекрестно-рекурсивным образом, т.е. для каждого момента t φt и µt вычисляют по φt и µt
Указанные данные, полученные от фильтра Калмана, могут содержать приращение фильтра Калмана и матриц перехода и наблюдений.
Оценку амплитуды неисправности в оптимальном варианте получают в скользящем окне оценки, которое соответствует определенному числу N итераций фильтра Калмана.
В соответствии с оптимальным вариантом осуществления изобретения такая оценка может быть получена методом наименьших квадратов в скользящем окне оценки, предпочтительно по следующей формуле:

В оптимальном варианте заданное число N итераций фильтра Калмана соответствует периоду, меньшему заранее установленного периода Т обнаружения неисправности. В частности, если символ 6 обозначает период итерации фильтра 3 Калмана, то скользящее окно оценки должно соответствовать следующему условию: N·δ≤T.
Такое скользящее окно оценки в оптимальном варианте совпадает со скользящим окном накопления отношений правдоподобия, связанных с данной неисправностью.
Использование такого периода обнаружения позволяет ограничить размеры скользящего окна, а также нагрузку на вычислительные средства.
В случае констатации возникновения неисправности у спутника оценка расхождений, вычисляемая модулем 5 в момент t для каждого из гибридных навигационных решений, сформированных фильтрами 8i Калмана, равна:
где величина βt вычислена по отклонению с использованием априорного наблюдения спутника, для которого констатирована неисправность. Модуль 40 отбора отклонений в оптимальном варианте сконфигурирован так, чтобы в таком случае осуществлять передачу модулю 41 обнаружения и модулю 5 адаптации только таких отклонений. Таким образом, отбор отклонений позволяет оценить влияние обнаруженной неисправности по отклонениям с использованием информации, переданной спутником, для которого констатирована данная неисправность.
Кроме того, также оценивают расхождение ковариации Р, ошибки гибридного навигационного решения, сформированного фильтром 8i Калмана, используя следующую формулу:
где  - ковариация оценки
- ковариация оценки  ошибки в момент t.
ошибки в момент t.
Модуль 41 обнаружения предпочтительно выполнен с возможностью накопления отношений правдоподобия для каждого спутника и каждого определенного типа неисправности в скользящем окне накопления.
Расчет оценок влияния неисправности на гибридные навигационные решения, сформированные фильтрами, осуществляют при помощи набора вычитающих элементов 6. Путем прибавления гибридного выходного сигнала при помощи набора сумматоров 10 для каждого фильтра 8, 8i, 8n получают оптимальное навигационное решение типа:
 ,
,
ковариация ошибки которого скорректирована величиной АРi.
Коррекция, произведенная таким образом на выходе каждого из фильтров, позволяет сократить расхождение между оценками положения, сформированными каждым из фильтров набора, и тем самым уменьшить суммарный защитный радиус, как показано на фиг.2а и 2b.
На фиг.2а представлено увеличение горизонтального предела защиты в случае возникновения неисправности при использовании устройства гибридизации по известным решениям. На схеме представлены оптимальные навигационные решения Х0, Х1, Xn и соответствующие им пределы защиты. Горизонтальный предел защиты вокруг положения Х0, рассчитанный основным фильтром, обозначен как HPL.
Предполагается, что неисправность влияет на первый спутник группировки. Для обозначения величин, на которые влияет неисправность, использовано обозначение «[неиспр.]». Первый вспомогательный фильтр не учитывает измерения, поступающие от неисправного спутника; оценка положения, сформированная данным фильтром не испытывает влияния неисправности и остается неизменной. Напротив, оценки положения, сформированные другими фильтрами набора, в частности положение Х0, изменяются. Происходит значительное увеличение горизонтального предела защиты.
Увеличение вертикального предела защиты может быть проиллюстрировано аналогичной схемой.
Решение по изобретению позволяет значительно ограничить увеличение горизонтального и вертикального пределов защиты, а следовательно, и защитный объем, в случае возникновения неисправности путем коррекции оптимальных навигационных решений, на которые влияет такая неисправность. Как показано на фиг.2b, расстояния между положениями, соответствующими оценкам, полученным от разных фильтров, значительно уменьшены так же? как и пределы защиты (HPL или VPL).
В оптимальном варианте осуществления изобретения для каждого спутника определяют два отношения Ir, Ir' правдоподобия, причем отношение Ir соответствует гипотезе о неисправности типа систематического смещения, а отношение Ir' соответствует гипотезе о неисправности типа линейного изменения.
В частности, динамическая матрица отклонения, определенная для каждой итерации фильтра Калмана, будет разной для неисправностей типа систематического смещения и неисправностей типа линейного изменения. Следовательно, отношения Ir, Ir' правдоподобия для каждого спутника различны.
Таким образом, изобретение позволяет различать случаи возникновения неисправностей типа систематического смещения и неисправностей типа линейного изменения.
В случае обнаружения неисправности типа систематического смещения этап оценки влияния неисправности на гибридное навигационное решение в оптимальном варианте осуществляют в скользящем окне оценки, начиная с момента констатации наличия неисправности типа систематического смещения. Таким образом, в случае обнаружения неисправности типа систематического смещения скользящее окно оценки оставляют активным в течение определенного времени, достаточного для оценки характеристик неисправности.
В оптимальном варианте оценка характеристик неисправности типа систематического смещения зависит от момента возникновения неисправности, т.е. момента, в который сумма отношений правдоподобия в скользящем окне накопления, соответствующем неисправности типа систематического смещения, превысила соответствующее пороговое значение. Таким образом, исключение измерений модулем 42 вводят в действие только после такой оценки.
В случае обнаружения неисправности типа линейного изменения оценку влияния неисправности на гибридное навигационное решение предпочтительно осуществляют в скользящем окне оценки, предшествующем констатации наличия неисправности типа линейного изменения.
В оптимальном варианте осуществления предусматривают этап подтверждения исключения, на котором гипотезу о наличии неисправности проверяют посредством статистического тестирования.
Для этого предпочтительно проверяют, подчиняются ли отклонения основного фильтра - за исключением отклонений, относящихся к спутнику, на котором обнаружена неисправность, - в течение определенного промежутка времени закону X2. В случае положительного результата проверки исключение подтверждают, в противном случае его игнорируют, и данный спутник не исключают из рассмотрения.
В оптимальном варианте, если несколько сумм отношений Ir, Ir' правдоподобия превышают соответствующие пороговые значения, модуль 41 обнаружения констатирует наличие одной неисправности. Такая неисправность соответствует наибольшей из сумм отношений правдоподобия для всех неисправностей, обнаруженных на всех спутниках.
Таким образом, в случае возможного наличия неисправностей на двух спутниках констатируют только наличие наиболее вероятной неисправности, а в случае возможного наличия двух неисправностей разных типов также констатируют только наличие наиболее вероятной неисправности.
Способ управления навигационной системой и навигационная система
Способ определения ошибки в контуре слежения псевдослучайного кода и приемник спутниковой системы позиционирования
Способ определения навигационных параметров для носителя и устройство гибридизации
Способ и система для гироскопических измерений с использованием вибрационного гироскопа
Датчик углового положения и узел, содержащий вращающуюся систему и такой датчик
Предмет экипировки с баллистической защитой и функцией переноски дополнительного снаряжения
Вибрационный гироскоп и способ его изготовления
Способ и система для определения границ защиты с полной экстраполяцией на протяжении заданного временного горизонта
Способ и устройство для обнаружения и исключения множественных отказов спутников системы гнсс
Способ дистанционного определения абсолютного азимута целевой точки
Способ управления навигационной системой и навигационная система
Способ определения ошибки в контуре слежения псевдослучайного кода и приемник спутниковой системы позиционирования
Способ определения навигационных параметров для носителя и устройство гибридизации
Способ и система для гироскопических измерений с использованием вибрационного гироскопа
Датчик углового положения и узел, содержащий вращающуюся систему и такой датчик
Предмет экипировки с баллистической защитой и функцией переноски дополнительного снаряжения
Вибрационный гироскоп и способ его изготовления
Способ и система для определения границ защиты с полной экстраполяцией на протяжении заданного временного горизонта
Способ и устройство для обнаружения и исключения множественных отказов спутников системы гнсс
Способ дистанционного определения абсолютного азимута целевой точки

