Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к испытательной технике и может быть использовано для определения приращения эффективной тяги двигателей самолета. Значение эффективной тяги представляет собой долю тяги изолированного двигателя, непосредственно используемую для движения летательного аппарата (ЛА). Актуальными задачами являются определение приращения тяги двигателя самолета с высокой точностью и достоверностью в условиях изменения режима работы испытываемых двигателей в полете и на земле, а также обеспечение оперативности и сокращение сроков испытаний.
Предлагаемый способ предусматривает использование штатных измерителей параметров полета, таких как угол атаки и перегрузка, а также выполнение специальных маневров, в ходе которых происходит оценивание параметра приращения тяги, что приводит к исключению некорректности при параметрической идентификации сигналов, поступающих от бортовых систем.
Известен аэродинамический способ измерения тяги реактивных двигателей путем определения скоростного напора газового потока, описанный в патенте RU 2100788, МПК G01L 5/13, опубликованном 27.12.1997 г.
Устройство, реализующее данный способ, предусматривает измерение скоростного напора газового потока посредством двух зондов с различными коэффициентами аэродинамического сопротивления, размещенных в газовом потоке вблизи измеряемой зоны. В результате чего определяют параметр, характеризующий отношение измеренных зондами усилий, по которому с учетом числа М потока или разницы коэффициентов аэродинамического сопротивления зондов определяют скоростной напор газового потока. Каждый из зондов может быть выполнен в виде жестко закрепленного на двигателе стержня, на закрепленном конце которого размещено силоизмерительное устройство, выполненное в виде калиброванной балки с тензорезисторами. По сути, измеряется импульс выхлопной струи в месте расположения зонда, на основе которого определяется тяга всего двигателя.
Однако известные способ и устройство не позволяют определить приращение тяги двигателей самолета и обладают рядом недостатков. Так, коэффициент сопротивления стержня на околозвуковых и трансзвуковых скоростях потока является нелинейным, неоднозначным, зависящим от числа М, что снижает точность измерения импульса тяги. Устройство является сложным, громоздким, приводит к увеличению габаритов двигателя и изменению его конструкции.
Известен способ автоматизированной оценки в полете суммарной тяги двигателей летательного аппарата, описанный в патенте RU 2364846, МПК G01L 5/13, опубликованном 20.08.2009 г., выбранном в качестве прототипа.
Известный способ включает в себя определение в полете суммарной силы тяги двигателей ЛА путем измерения самолетными датчиками скорости полета ЛА в дискретные равноотстоящие моменты времени, измерения продольной и нормальной перегрузок и скоростного напора. При этом проводят измерения на неустановившихся режимах полета, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме. В качестве исходного балансировочного полета принимают горизонтальный полет на заданной высоте.
Однако известный способ не позволяет определить приращение тяги двигателей самолета при проведении испытаний в воздухе и на земле. Определение тяги получается громоздким и сложным в вычислительном отношении.
Целью предлагаемого способа определения тяги двигателей и устройства для его осуществления, при изменении режима работы двигателей, является обеспечение возможности определения приращения тяги двигателя, причем с высокой точностью, без усложнения конструкции и процесса эксплуатации двигателей, при уменьшенном объеме трудозатрат во время проведения испытаний в полете и (или) на земле.
Поставленная цель достигается за счет того, что согласно заявленному способу определения тяги двигателей самолета, включающему измерения угла атаки самолета, перегрузки вдоль продольной оси самолета, на основании полученных измерений, используя константы, характеризующие конструкцию и аэродинамические характеристики испытуемого самолета, такие как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, априорно известный выходной импульс двигателя Рвых0, ускорение свободного падения g, масса самолета m, и применяя метод наименьших квадратов, определяют приращение эффективной тяги, причем определение приращения эффективной тяги двигателя осуществляют при выполнении маневров, обеспечивающих при изменении режима работы двигателей примерное постоянство параметров полета, влияющих на тягу двигателя, а именно числа М, высоты и угла атаки.
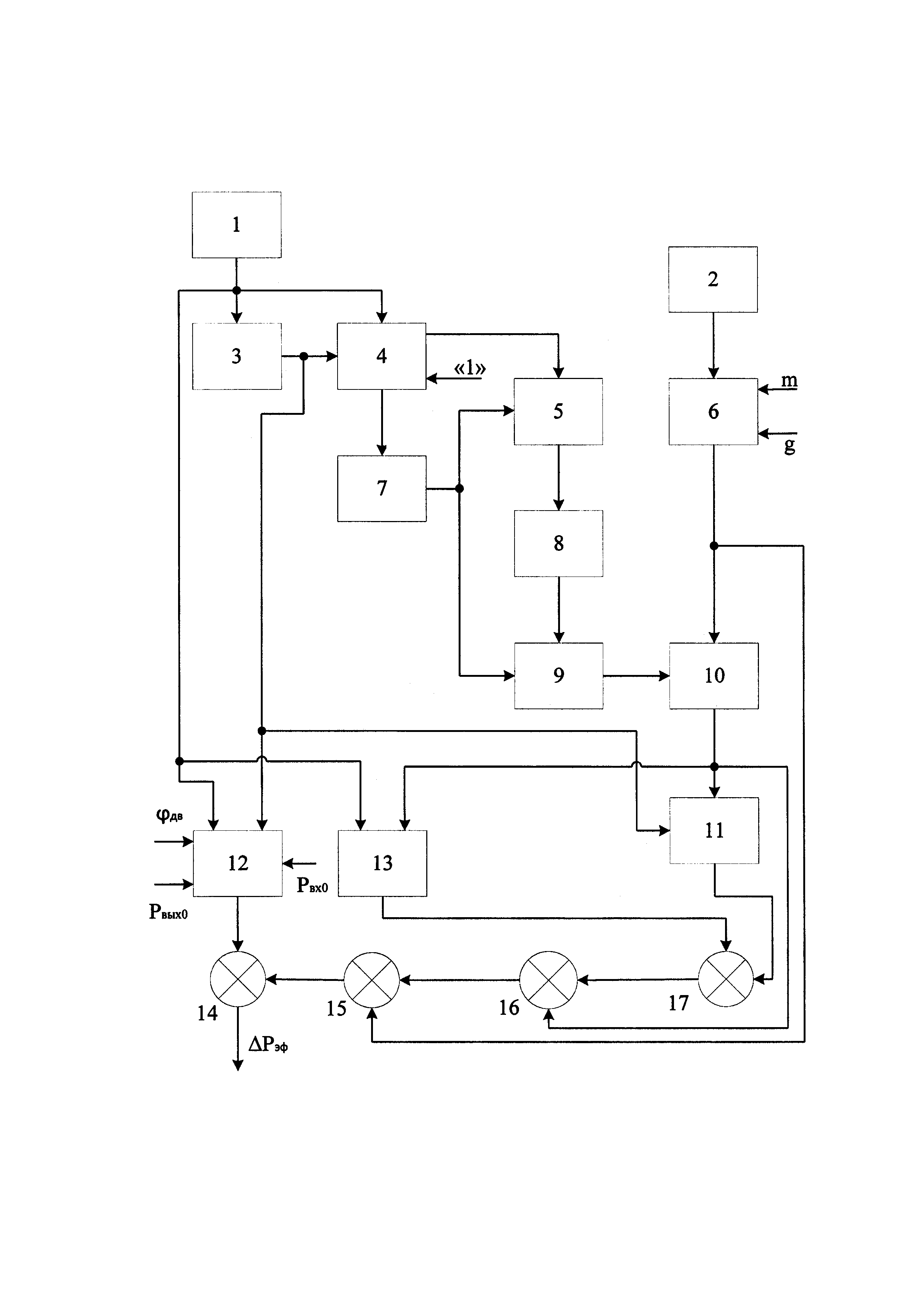
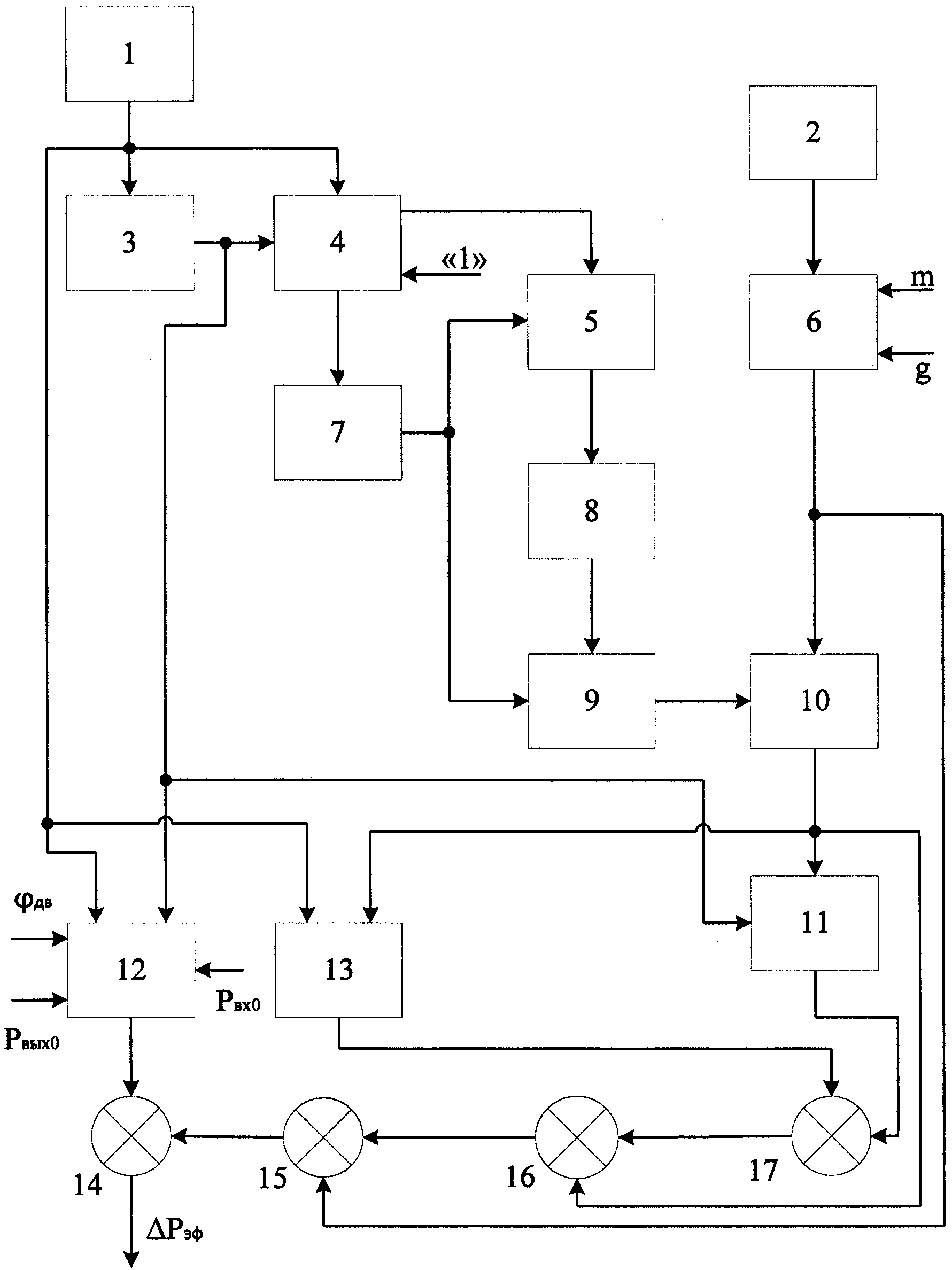
Для реализации заявленного способа предлагается устройство определения тяги двигателей самолета при изменении режима работы, содержащее датчик угла атаки и датчик перегрузок, в которое дополнительно введены последовательно соединенные блок возведения в квадрат, первый блок формирования матрицы и блок транспонирования матрицы, последовательно соединенные первый блок умножения матриц, блок обращения матрицы и второй блок умножения матриц, последовательно соединенные второй блок формирования матрицы, третий блок умножения матриц и первый умножитель, блок определения погрешности, второй умножитель, последовательно соединенные первый, второй, третий и четвертый сумматоры, причем выход датчика угла атаки подключен к входу блока возведения в квадрат, ко второму входу первого блока формирования матрицы, к первым входам блока определения погрешности и второго умножителя, выход блока возведения в квадрат подключен ко вторым входам блока определения погрешности и первого умножителя, третий вход первого блока формирования матрицы является входом для сигнала, соответствующего константе «1», выход блока транспонирования матрицы подключен ко вторым входам первого блока умножения матриц и второго блока умножения матриц, второй вход первого блока умножения матриц соединен со вторым выходом первого блока формирования матрицы, первый вход второго блока формирования матрицы соединен с выходом датчика перегрузок, второй и третий входы второго блока формирования матрицы являются входами для сигналов, соответствующих массе m и ускорению свободного падения g, второй вход третьего блока умножения матриц соединен с выходом второго блока умножения матриц, выход первого умножителя подключен к первому входу четвертого сумматора, второй вход второго умножителя соединен с выходом третьего блока умножения матриц, третий, четвертый и пятый входы блока определения погрешности являются входами для сигналов, соответствующих входному импульсу двигателя Рвх0, выходному импульсу двигателя Рвых0 и углу отклонения оси двигателя от продольной оси самолета φдв, второй вход четвертого сумматора соединен с выходом второго умножителя, второй вход третьего сумматора соединен с выходом третьего блока умножения матриц, второй вход второго сумматора соединен с выходом второго блока формирования матриц, второй вход первого сумматора соединен с выходом блока определения погрешности, выходом устройства является выход первого сумматора.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства.
Устройство содержит датчик 1 угла атаки, датчик 2 перегрузки, блок 3 возведения в квадрат, первый блок 4 формирования матрицы, первый блок 5 умножения матриц, второй блок 6 формирования матрицы, блок 7 транспонирования матрицы, блок 8 обращения матрицы, второй блок 9 умножения матриц, третий блок 10 умножения матриц, первый умножитель 11, блок 12 определения погрешности, второй умножитель 13, первый, второй, третий и четвертый сумматоры 14, 15, 16 и 17.
Главная особенность предлагаемого способа и устройства заключается в том, что для получения оценок тяги используются измерения основных полетных параметров, таких как продольная перегрузка и угол атаки. Измерения параметров двигателя (давление, температура в заданных сечениях) не требуются, газодинамическая модель двигателя в алгоритме не используется, также не требуются оценки силы аэродинамического сопротивления. Искомая величина приращения эффективной тяги двигателей определяется при использовании параметрической идентификации на земле или в полете. Наблюдаемость обеспечивается за счет выполнения специального тестового маневра. Для заданных значений числа М и высоты Н в одном режиме работы двигателей определяют значение (эффективной) абсолютной тяги двигателей, далее определяют приращения тяги, соответствующие другим эксплуатационным режимам работы двигателей для этих же значений числа М и высоты Н.
Сущность изобретения заключается в том, что на высоте Н=3000 м и скорости полета, соответствующей М=0,4 выполняется балансировка самолета в прямолинейном горизонтальном полете (ПГП), запоминается при этом угол атаки α0.
Далее выполняется движение ручкой управления самолетом (РУС) по тангажу "от себя" и "на себя" таким образом, что приращение угла атаки составляет ±(1…1,5) градуса. Затем необходимо восстановить ПГП на той же высоте и с тем же числом М, отклонить ручку управления двигателем (РУД) обоих двигателей на увеличение тяги в положение, среднее между исходным и "Максимал", перевести самолет в прямолинейный набор высоты и подобрать угол тангажа так, чтобы число М и угол атаки α0 оставались постоянными, то есть такими же, как на участке ПГП. После выхода двигателя на установившийся режим работы требуется выполнить участок полета в наборе с указанными М и α0 длительностью 2…3 с, далее в наборе выполнить дачи РУС по тангажу "от себя" и "на себя" длительностью 1,5…3 с так, чтобы приращение угла атаки составило ±(1…1,5) градуса. В завершение полета перевести самолет в ПГП с исходными Н и М.
Выполнить аналогичные действия, отклоняя РУД в положение "Максимал" и "Малый газ". При необходимости, кроме того, режим выполняется для нескольких положений РУД между "Максимал" и "Малый газ".
При выполнении маневров заданные значения параметров необходимо выдерживать с погрешностью, не превышающей ±0,15 по числу М и ±(0,5°…1°) по углу атаки.
В соответствии с общим подходом к определению характеристик самолетов в летных испытаниях указанный маневр необходимо выполнить во всем эксплуатационном диапазоне высот и скоростей полета.
Рассмотрим следующую модель самолета. Сила аэродинамического сопротивления и подъемная сила направлены соответственно вдоль осей Охе и Oye связанной системы координат и вычисляются по формулам
Хе=qSCxe,
Ye=qSCye,
где  - скоростной напор, Па;
- скоростной напор, Па;
S - эквивалентная площадь крыла, м2;
ρн - плотность воздуха на высоте полета Н, кг/м3;
Vист - истинная скорость полета самолета.
Аэродинамические коэффициенты в связанной системе координат вычисляются по формулам

где α - угол атаки, градус;
δВ - отклонение рулей высоты.
Значения аэродинамических коэффициентов и геометрических параметров зависят от типа ЛА.
Рассмотрим случай, когда входной и выходной импульсы двигателя учитываются раздельно. При этом входной импульс Рвх направлен вдоль продольной оси, а выходной Рвых - вдоль оси двигателя, которая отклонена относительно связанной оси на угол установки двигателя φдв.
Проекции аэродинамических сил входного и выходного импульса на связанную ось
X∑e=qScхе-Рвх+Рвыхcos(φдв+α),
Проекции перегрузок на связанную ось

Проекция входного импульса на ось Оye равна нулю.
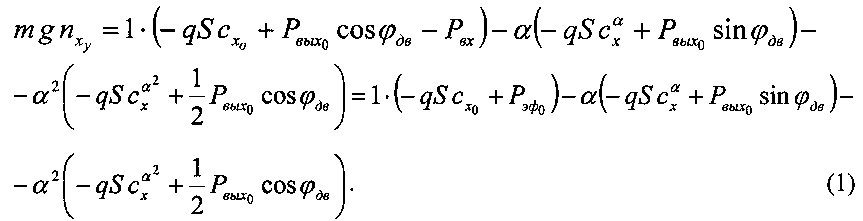
Получим теперь окончательные выражения для проекций перегрузок на продольную ось, подставляя разложения аэродинамических коэффициентов:

С учетом того, что: cos(φдв+α)=cosφдвcosα-sinφдвsinα и раскладывая cosα и sinα в ряд относительного α0=0, получим
Тогда для малых углов атаки

Обозначим начальные значения составляющих тяги  тогда
тогда 
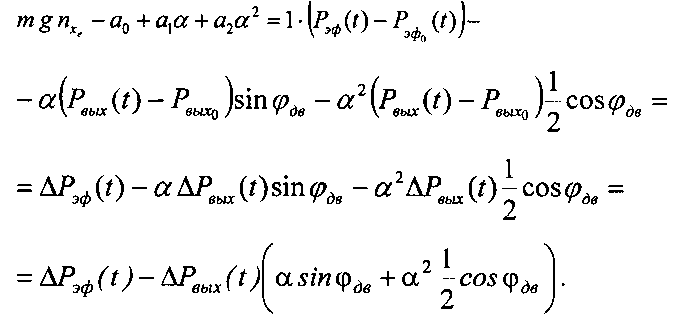
Уравнение принимает вид:
Определим приращение эффективной тяги Рэф при изменении режима работы двигателя. При этом выполняется специальный тестовый режим, описанный ранее. Основная идея режима состоит в том, что из ПГП выполняется ступенчатое отклонение РУД, после чего изменение тяги компенсируется изменением угла наклона траектории. В этом случае число М и угол атаки остаются приблизительно неизменными, высота изменяется незначительно (100…200 м), существенно изменяется только эффективная тяга Рэф и выходной импульс Рвых.
Запишем уравнение, аналогичное (1), обозначая в явном виде зависимость
Рэф(t), Рвых(t) от времени

Пусть, согласно методу наименьших квадратов (МНК), по результатам симметричных отклонений ручки управления самолетом по тангажу получены оценки параметров

Тогда умножим эти оценки соответственно на 1, -α, -α2 и вычтем их из уравнения (2).
Получим
Или

где  находится по измерениям перегрузки в полете.
находится по измерениям перегрузки в полете.
Выражение (4) позволяет найти оценки для приращения эффективной силы тяги ΔРэф(t). Второе слагаемое в левой части (4) является погрешностью. Для ее снижения можно использовать априорные данные о Рвых0, согласно газодинамической модели двигателя. Расчетами установлено, что, если погрешность априорного значения не превышает 10%, ее влияние на оценки остальных параметров не превышает 0,25%.
Вектор идентифицируемых параметров
Значения параметров определяются формулами (3).
Идентификация выполняется по МНК на основе уравнения (2).
Учтем в явном виде, что бортовые измерения выполняются в дискретные моменты времени i=1, 2, …, N, где N - число измерений на участке идентификации.
Для нахождения оценок согласно МНК формируются вектор Y размерности N и матрица X размерности N×N:
Тогда оценка вектора идентифицируемых параметров находится по формуле

Далее полученные оценки используются в формуле (4).
Устройство определения приращения эффективной тяги работает следующим образом: по измеренным сигналам датчика 1 угла атаки α, используя сигналы константы «1» и с блока 3 возведения в квадрат значение α2, в первом блоке 4 формирования матрицы формируется матрица X, элементы матрицы определяются согласно выражению (6).
Матрица Y формируется во втором блоке 6 формирования матрицы по измеренным сигналам датчика 2 перегрузки nхе, используя сигналы констант m и g, элементы которой определяются выражением (5).
В блоке 5 умножения матриц умножаются матрица X на свое же транспонированное значение X в блоке 7 транспонирования матрицы.
Полученная в результате матрица XTX обращается в блоке 8 обращения матрицы (XTX)-1 и во втором блоке 9 умножения матриц умножается на транспонированную матрицу ХT. Полученная матрица [(ХТХ)-1ХT] в третьем блоке 10 умножения матриц умножается на матрицу Y, на выходе которого получаем искомые коэффициенты 
Далее, путем использования априорной информации о тяге двигателя, в блоке 12 определения ошибки вычисляется ошибка  не превышающая 0,25% от искомого приращения тяги.
не превышающая 0,25% от искомого приращения тяги.
Первый, второй умножители 11, 13 и первый, второй, третий, четвертый сумматоры 14, 15, 16, 17 выполняют соответствующие операции согласно выражению (4):

Таким образом, на выходе предлагаемого устройства получаем искомое значение величины приращения тяги двигателя ЛА ΔРэф.
Техническим результатом является возможность определения приращения эффективной тяги реактивного двигателя самолетов, путем использования измеренных значений параметров полета самолета: угла атаки α, продольной перегрузки nхе и априорных значений констант, характеризующих параметры летательного аппарата, таких как угол отклонения оси двигателя от продольной оси самолета φдв, входной и выходной импульсы двигателя Рвх0 и Рвых0, ускорение свободного падения g, масса самолета m. Значения вышеперечисленных констант определяются при продувках полномасштабной модели воздушного судна в аэродинамических трубах и путем взвешиваний и юстировки при изготовлении самолета.
Заявляемое устройство просто в реализации и может быть использовано на всех типах самолетов, независимо от используемого двигателя. В качестве датчиков перегрузки выбираются имеющиеся на борту акселерометры БИНС, при этом элементы операций с матрицами могут быть реализованы на стандартных элементах вычислительной техники.
Оценки приращения тяги при изменении режима работы двигателей можно использовать также для контроля технического состояния двигателя, поскольку, как известно, при деградации двигателя величина приращения тяги при фиксированном изменении режима уменьшается.
Устройство определения тяги двигателей самолета
Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Исполнительный механизм системы управления
Устройство определения углов пространственной ориентации летательного аппарата
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Исполнительный механизм системы управления
Способ управления полетом летательного аппарата
Способ формирования отказоустойчивой комплексной системы управления (ксу) и отказоустойчивая ксу
Устройство определения тяги двигателей самолета
Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Исполнительный механизм системы управления
Устройство определения углов пространственной ориентации летательного аппарата
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Исполнительный механизм системы управления
Способ управления полетом летательного аппарата
Способ формирования отказоустойчивой комплексной системы управления (ксу) и отказоустойчивая ксу

