Результат интеллектуальной деятельности: Исполнительный механизм системы управления
Вид РИД
Изобретение
Изобретение относится к области авиации, более конкретно к системам управления аэродинамическими поверхностями самолетов, и может быть использовано как при создании новых, так и при модернизации существующих летательных аппаратов. Оно также может быть использовано в других областях техники, где существует потребность в точных, надежных и скоростных приводах, с регулируемой скоростью перемещения выходного штока и с обратной связью.
Известны изобретения, относящиеся к системам управления самолетов (патенты US №6827311 от 07.04.2003, US №7007897 от 22.06.2004, EP №1964771 от 26.02.2008). Система управления каждым аэродинамическим элементом включает гидравлический (или пневматический) и электромеханический приводы. Недостатком такой системы управления является использование на самолете для управления аэродинамической поверхностью как минимум двух систем генерирования и распределения энергии - электрической и гидравлической (или пневматической) систем, оснащенных аналогичными по функциональному назначению устройствами.
Существует изобретение «Рулевой привод», описанное в патенте РФ №2444463, МПК B64C 13/00, опубликованное 15.09.2010 г.
Запатентованное устройство содержит в своем составе двигатель, редуктор, размещенную в его корпусе шарико-винтовую передачу в виде ходового винта с ходовой гайкой, реечную зубчатую передачу в виде зубчатой рейки каретки, связанной с ходовой гайкой, и зубчатого сектора вала руля. При этом рулевой привод снабжен блокатором изгибных деформаций ходового винта, выполненным в виде двух пар подшипников качения, закрепленных на каретке ходовой гайки и опирающихся на корпус редуктора. Корпус редуктора в районе качения двух пар подшипников выполнен в виде двух продольных плоских направляющих, образующих между собой угол 120°…160°. Подшипники качения установлены на каретке ходовой гайки с возможностью регулирования их поджатия к продольным плоским направляющим корпуса редуктора, например, с помощью эксцентриков. Устройство предназначено для управления аэродинамическими поверхностями управления беспилотных летательных аппаратов.
Известный рулевой привод не обеспечивает возможности блокировки движения выходного штока из-за воздействия внешних сил, обладает сравнительно низкой точностью отработки командных сигналов из-за отсутствия датчика положения ротора. Привод не обеспечивает стабильность работы на различных скоростях вращения электродвигателя, не контролирует положение выходного штока привода, что приводит к ухудшению динамических характеристик ЛА. Перечисленные недостатки ограничивают использование данного привода в системах автоматического управления легких пилотируемых и беспилотных летательных аппаратов.
Другим недостатком этой конструкции являются ее ограниченные функциональные возможности, в частности с помощью этого привода невозможно управлять исполнительными элементами, обладающими значительным усилием в направлении продольной оси привода, такими как закрылки, створки и т.п., что связано с обеспечением привода только вращательным моментом.
Известно другое изобретение «Электропривод», описанное в патенте РФ №2399147, МПК H02P 7/29, H02P 7/18, H02P 7/06, опубликованное 10.09.2010 г. и принятое нами за прототип.
Электропривод содержит блок управления, электродвигатель, тахогенератор, при этом блок управления содержит два компаратора, микропроцессор, RS-триггер, интегратор, три ключа, генератор тока.
Указанные элементы электрически связаны между собой так, как указано в формуле изобретения.
Недостатком этого привода является отсутствие в его составе датчика положения ротора для ограничения выбега ротора, тормозного устройства для ограничения движения штока под воздействием внешних сил, за отсутствием датчика обратной связи не контролирует положение выходного штока привода, что приводит к ухудшению динамических характеристик ЛА и, как следствие, ограничивает его использование в системах автоматического регулирования легких пилотируемых и беспилотных летательных аппаратов. Другим недостатком этой конструкции являются ее ограниченные функциональные возможности. На этом приводе невозможно размещать исполнительные элементы, требующие значительных усилий в направлении продольной оси привода из-за отсутствия шарико-винтовой пары.
Целью изобретения является обеспечение высоких энергетических, динамических показателей и надежности, расширение функциональных возможностей электромеханического рулевого привода и повышение стабильности и точности в широком диапазоне изменения частоты вращения электродвигателя.
Для достижения поставленной цели в предлагаемом исполнительном механизме системы управления, включающем в себя блок управления и рулевой привод, содержащий электродвигатель и тахогенератор, согласно изобретению рулевой привод дополнительно снабжен датчиком положения ротора, двухступенчатым редуктором, шарико-винтовой парой и датчиком обратной связи положения штока, выполненными в виде отдельных секций, а блок управления содержит последовательно соединенные вторичный источник электрического питания и датчик потребляемого тока, подключенные к источнику постоянного тока, приемо-передающий блок, последовательно соединенные микроконтроллер, блок управления силовыми ключами и силовой блок, выход которого подключен к силовым обмоткам электродвигателя, и последовательно соединенные блок проверки исправности микроконтроллера и блок включения режима демпфирования и торможения, при этом выход тахогенератора подключен к первому входу микроконтроллера, второй и третий входы которого соединены с соответствующими выходами приемо-передающего устройства, четвертый вход соединен с одним из выходов датчика потребления тока, другой выход которого подключен ко второму входу силового блока, к третьему входу которого подключен выход блока включения режима демпфирования и торможения, пятый вход микроконтроллера соединен с выходом датчика обратной связи положения штока, шестой вход соединен с выходом датчика положения ротора, а выход подключен к блоку проверки исправности микроконтроллера.
Исполнительный механизм системы управления (ИМСУ) состоит из рулевого привода (РП) и блока управления приводом (БУП). По функциональному назначению это следящий электропривод, обеспечивающий реверсивное поступательное движение выходного звена, являющегося выходным штоком ИМСУ, в соответствии с управляющими сигналами. Управление ИМСУ осуществляется в режиме отработки сигнала, пропорционального заданному положению штока. Контроль перемещения производится по датчику обратной связи. Скорость вращения двигателя регулируется, стабилизируется и имеет систему торможения методом демпфирования.
Сущность изобретения поясняется чертежами, где приведены:
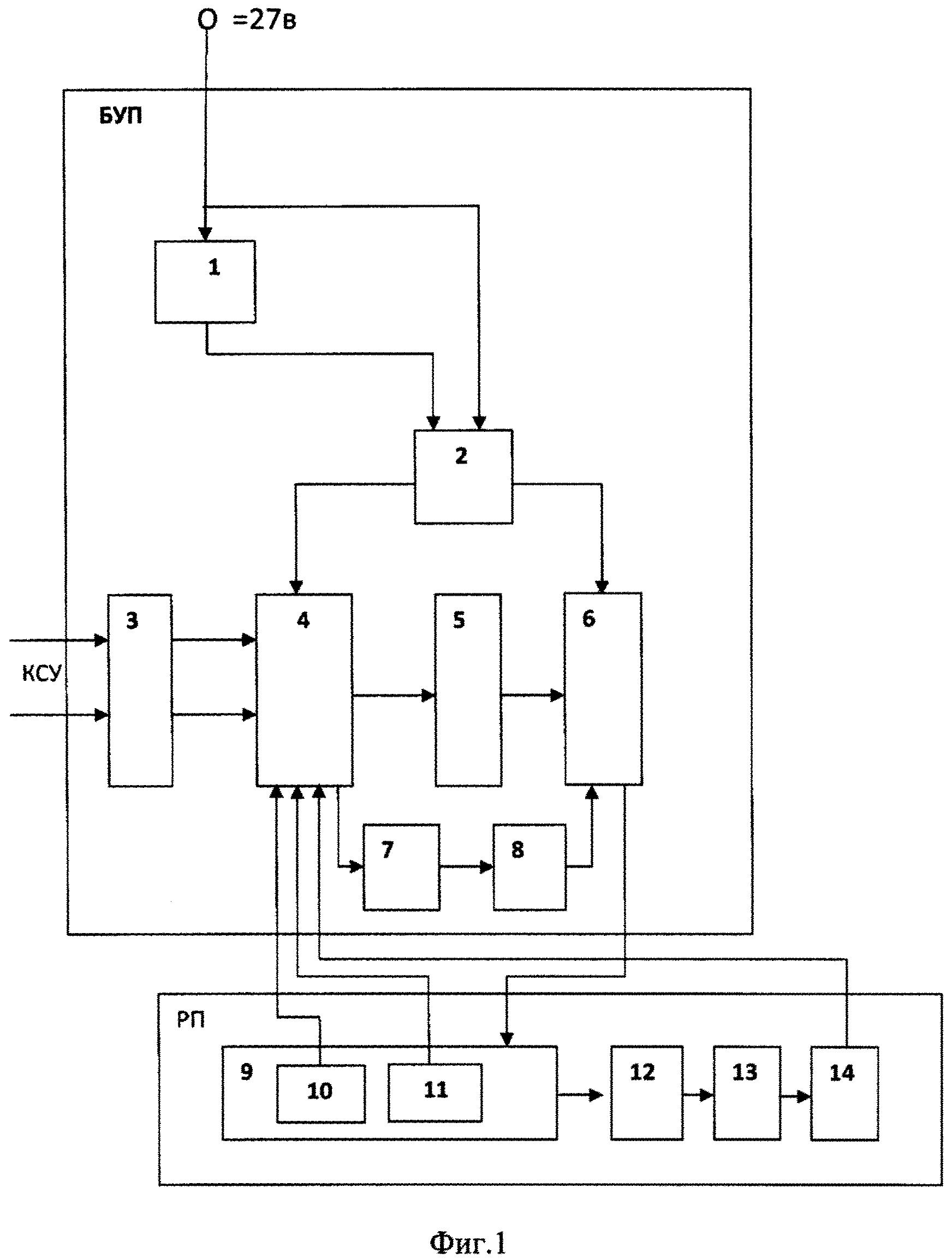
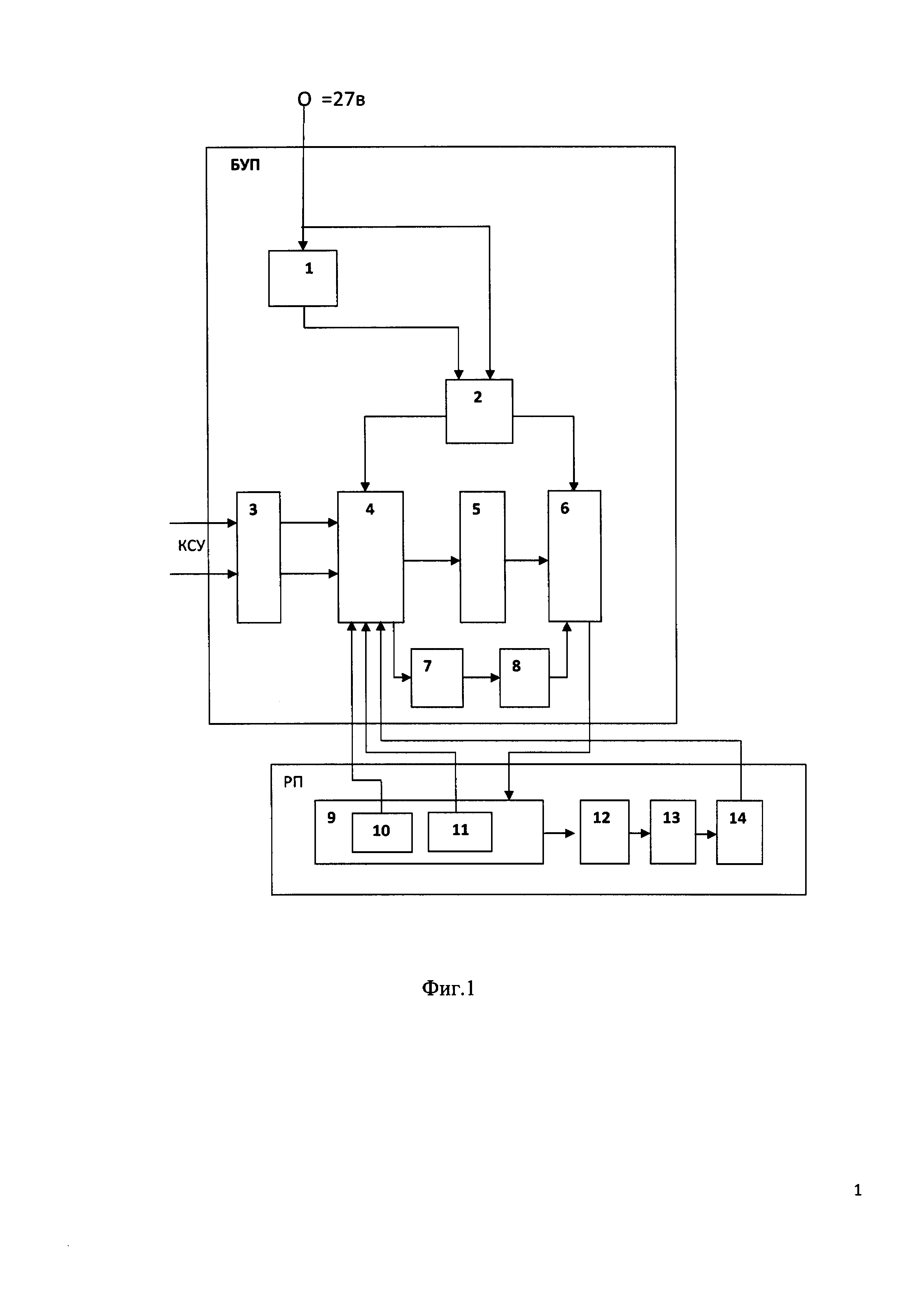
на фиг. 1 - функциональная схема ИМСУ;
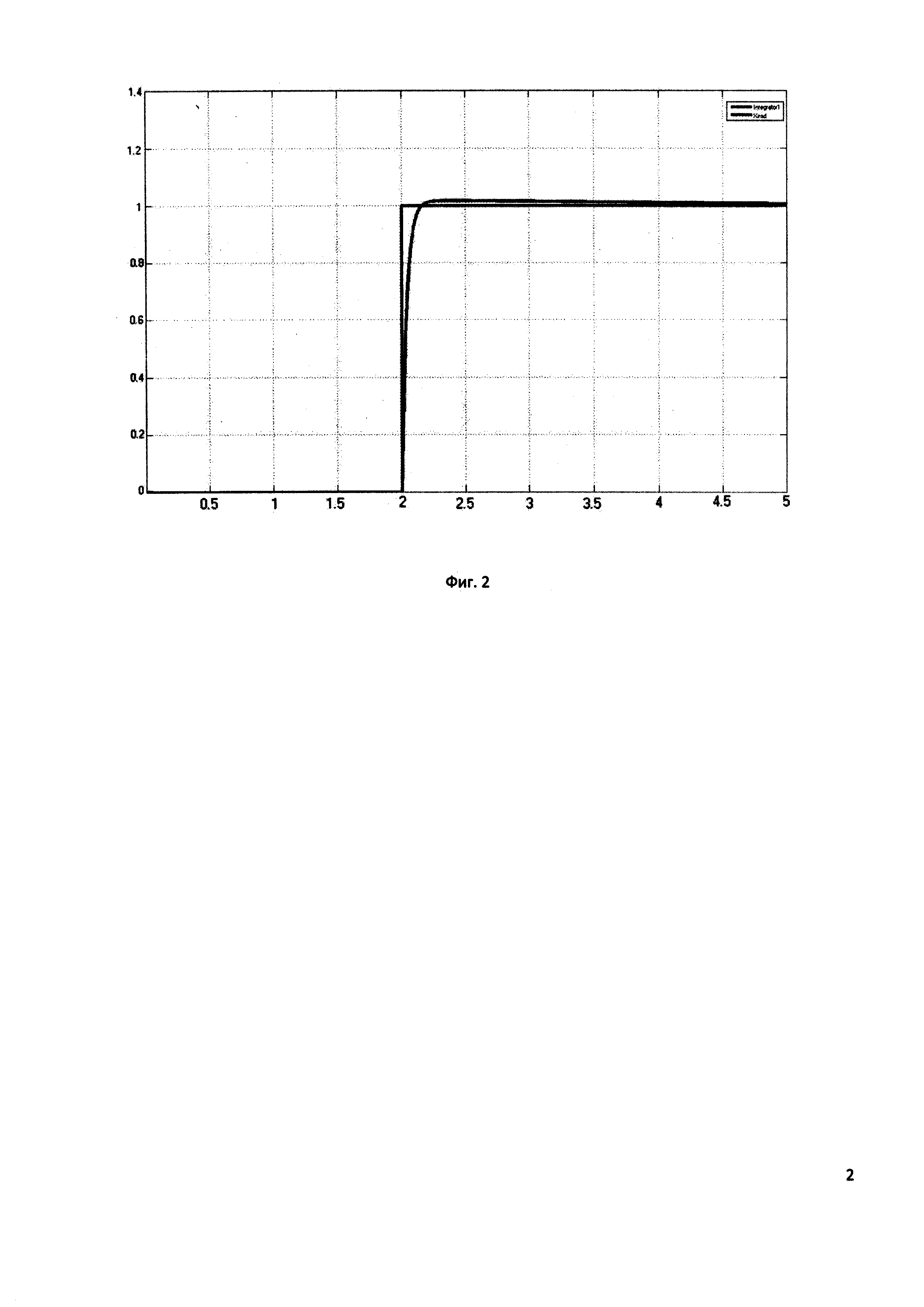
на фиг. 2 и 3 - графики результатов моделирования ИМСУ, полученные при подаче управляющих сигналов, соответствующих перемещениям штока 1 мм и 5 мм.
БУП включает в свой состав: блок 1 вторичного электропитания, датчик 2 потребления тока, приемо-передающий блок 3, микроконтроллер 4, блок 5 управления силовыми ключами, силовой блок 6, блок 7 проверки исправности микроконтроллера и блок 8 включения режима демпфирования и торможения. БУП обеспечивает регулирование и стабилизацию частоты вращения электродвигателя, торможение, измерение и ограничение уровня тока, потребляемого обмотками электродвигателя от внешнего источника, выдачу сигналов “ошибка” в критических режимах.
Ниже раскрыто назначение функциональных блоков в составе БУП.
Блок 1 вторичного электропитания предназначен для преобразования бортового напряжения питания в низковольтное напряжение питания управляющей электроники и фильтрации входных помех. Интеграция блока питания в БУПСУ эффективна с точки зрения минимизации расстояния между источником и потребителем электричества, что приводит к уменьшению потерь и лучшей помехозащищенности.
Датчик 2 потребляемого тока предназначен для формирования сигнала обратной связи по току посредством измерения амплитуды тока, потребляемого двигателем. Сигнал о потребляемом токе также используется в реализации алгоритма ограничения пускового тока двигателя.
Приемо-передающий блок 3 (ППБ) цифровых сигналов предназначен для преобразования интерфейса последовательных сигналов, поступающих от комплексной системы управления (КСУ), в сигналы с внутренним интерфейсом. Цифровой информационный обмен между ИМСУ и КСУ осуществляется по резервированным магистральным каналам информационного обмена (МКИО) в соответствии с ГОСТ. Цифровой канал информационного обмена БУП обеспечивает сопряжение с КСУ и гальваническую развязку между ИМСУ и КСУ. ППБ преобразует интерфейс последовательных сигналов, поступающих от КСУ, в сигналы с внутренним интерфейсом схемы управления. Кроме того, в зависимости от логики управления ППБ используется для выдачи сигналов ДОС, уровня потребляемого тока, скорости двигателя и других сигналов в КСУ.
Микроконтроллер 4 предназначен для управления током двигателя по результатам обработки входных сигналов программной моделью исполнительного механизма, включенной в код прошивки процессора. Входными сигналами в данном случае являются: управляющий сигнал, сигнал от датчика потребляемого тока, сигнал обратной связи по штоку, сигнал от ДПР и сигнал обратной связи по скорости (от тахогенератора). Сигнал обратной связи по скорости обеспечивает изодромную обратную связь в структурной схеме РП, что позволяет улучшить частотные характеристики механизма. Сигнал обратной связи по току позволяет обеспечить токовое управление электродвигателем и дополнительно может использоваться для реализации ограничения по току и определения критической ситуации заклинивания редуктора.
Блок 5 управления силовыми ключами предназначен для преобразования низковольтных сигналов с микроконтроллера 4 в высоковольтные сигналы управления силовыми ключами силового блока 6, встроенными по схеме трехфазного инвертора.
Силовой блок 6 предназначен для коммутации силового питания на силовые обмотки электродвигателя в зависимости от сигналов, поступающих от блока 5 управления силовыми ключами. В схеме применяют мощные полевые транзисторы, что обеспечивает низкое тепловыделение в силовой схеме.
Блок 7 проверки исправности микроконтроллера выполняет контролирующую функцию ИМСУ и осуществляет диагностику отказов механизмов электропривода и БУП.
Блок 8 включения режима демпфирования и торможения предназначен для обеспечения включения режима демпфирования выходного штока в случае отказа управляющего процессора (схема включения режима демпфирования) и для предотвращения несанкционированного перемещения штока путем отключения питания двигателя и перехода в режим демпфирования. Преимуществом применения режима демпфирования в случае отказа привода является предотвращение автоколебаний рулевой поверхности при сохранении питания от вторичного источника электрического питания и даже при отсутствии питания.
Рулевой привод предназначен для преобразования электрической энергии в энергию перемещения выходного звена и включает в свой состав бесконтактный электродвигатель 9 с тахогенератором 10 и датчиком 11 положения ротора (ДПР), двухступенчатый редуктор 12, шарико-винтовую пару 13 и ДОС 14.
Питание электродвигателя осуществляется от системы электроснабжения напряжением постоянного тока. Для управления силовыми обмотками используется встроенный датчик положения ротора (ДПР) на элементах Холла. Электродвигатель 9 приводит во вращение двухступенчатый редуктор 12. Двухступенчатый редуктор является колесно-зубчатым редуктором. Вторая ступень редуктора обеспечивает передачу крутящего момента шарико-винтовой паре 13, преобразующей вращательное движение винта в поступательное движение гайки-штока.
Информационные сигналы о положении ротора от датчика положения ротора, скорости вращения ротора от тахогенератора, размещенных в виде дополнительных секций на валу электродвигателя, и о положении штока от ДОС используются для управления электродвигателем. Двигатель вращает двухступенчатый редуктор 12 вместе с шарико-винтовой парой 13, обеспечивая требуемые скорости перемещения выходного штока, в заданном диапазоне нагрузок. Управление производится БУП в зависимости от управляющих сигналов, получаемых от КСУ, от информации с ДОС 14, сигналов от тахогенератора 10 двигателя 9 и датчика 11 положения ротора двигателя.
Связь ДОС с выходным штоком РП (исполнительным механизмом) осуществляется при помощи безлюфтовой передачи с подпружиненной разрезной шестерней, которая установлена на датчике.
ИМСУ работает следующим образом. В начале каждого вычислительного цикла осуществляется программно-аппаратный самоконтроль микроконтроллера 4. Управляющий микропроцессор микроконтроллера 4 принимает и проверяет достоверность командных слов и слов данных, поступающих по МКИО от КСУ. Каждое из оконечных устройств записывает в отведенные ему ячейки общего ОЗУ код заданного положения штока, код режима работы и признак обновления информации МКИО.
Микроконтроллер 4 считывает из памяти МКИО код сигнала заданного положения штока, код признаков режимов работы ИМСУ, а также код признаков обновления информации МКИО. После этого микроконтроллер получает информацию с датчика ДОС 14, тахогенератора 10, датчика положения ротора 11, датчика потребления тока 2 и контролирует признаки обновления получаемой информации, нахождение в установленном допуске тока обмоток электродвигателя. При наличии признаков исправности, а также при наличии признака рабочего режима, поступающего от КСУ, в микроконтроллере 4 формируется сигнал интегральной исправности.
При наличии сигнала интегральной исправности осуществляется управление электродвигателем 9. Если сигнал исправности отсутствует, то сигнал управления электродвигателем сохраняется с предыдущего шага и включается алгоритм задержки включения режима демпфирования. Если в течение заданного интервала времени повторяется сигнал интегральной неисправности, то формируется команда на включение режима демпфирования. В этом случае переход в рабочий режим будет осуществлен при наличии интегральной исправности в течение заданного интервала времени. В конце цикла микроконтроллер формирует слова состояний привода, записывает их в ОЗУ контроллера МКИО, который передает слова состояний в КСУ. Алгоритмы функционирования ИМСУ не зависят от режима полета, а определяются состоянием ИМСУ и командами КСУ.
ИМСУ реализует следующие режимы: наземный контроль, рабочий режим, режим демпфирования и режим перезапуска.
Углубленный наземный контроль реализуется с помощью КСУ, которая управляет ИМСУ, находящимся в рабочем режиме перед полетом. При этом возможна отработка контрольных значений положения штока, а работоспособность привода проверяется его алгоритмами непрерывного встроенного контроля и алгоритмами контроля КСУ.
Алгоритм контроля работоспособности каналов МКИО проверяет наличие признаков обновления информации. Если у канала отсутствует признак обновления информации, то он считается неработоспособным. В соответствующий разряд слова состояния ИМСУ записывается «1» при наличии признака обновления канала и «0» при отсутствии этого признака. Сигнал управления с микроконтроллера не обновляется, если:
- хотя бы один из признаков состояния, сформированных алгоритмом контроля, свидетельствует об отказе;
- принимают нулевое значение признаки исправности входной информации.
Если в течение заданного времени задержки сохраняется ситуация, описанная выше, то подается команда на включение режима демпфирования, и ИМСУ переходит в режим удержания штока. Также возможен переход в режим демпфирования и удержания штока по команде от КСУ.
Рулевой привод обеспечивает следующие основные функции:
- перемещение штока в заданное положение и удержание в заданном положении;
- обеспечение электродвигателем требуемого усилия выходного штока через двухступенчатый колесно-зубчатый редуктор и шарико-винтовую передачу;
- фиксацию штока по команде от КСУ в выключенном (обесточенном) состоянии или при выявлении отказа с помощью срабатывания блока включения режима демпфирования и торможения;
- ограничение перемещения выходного штока в пределах рабочего хода путем отключения питания двигателя и срабатывания блока включения режима демпфирования и торможения;
- стабилизацию скорости вращения ротора электродвигателя в заданном режиме;
- работу электропривода в следящем режиме в пределах рабочего хода штока без выхода на жесткие упоры винта и гайки.
- предотвращение несанкционированного перемещения штока путем отключения питания двигателя и срабатывания электромагнитного тормоза.
На Фиг. 2 и Фиг. 3 приведены результаты моделирования ИМСУ при подаче ступенчатых сигналов, соответствующих 1 мм и 5 мм перемещениям штока РП. Результаты моделирования показали точность, надежность срабатывания ИМСУ.
Техническим результатом предложенного изобретения является обеспечение высоких энергетических и динамических показателей, расширение функциональных возможностей электромеханического рулевого привода и повышение стабильности и точности в широком диапазоне изменения частоты вращения электродвигателя, а также повышенной точности и надежности исполнительного механизма системы управления.
Исполнительный механизм системы управления может быть использован на всех типах беспилотных и легкомоторных пилотируемых летательных аппаратах.
Исполнительный механизм системы управления, включающий в себя блок управления и рулевой привод, содержащий электродвигатель и тахогенератор, отличающийся тем, что рулевой привод дополнительно снабжен датчиком положения ротора, двухступенчатым редуктором, шарико-винтовой парой и датчиком обратной связи положения штока, выполненными в виде отдельных секций, а блок управления содержит последовательно соединенные вторичный источник электрического питания и датчик потребляемого тока, подключенные к источнику постоянного тока, приемо-передающий блок, последовательно соединенные микроконтроллер, блок управления силовыми ключами и силовой блок, выход которого подключен к силовым обмоткам электродвигателя, и последовательно соединенные блок проверки исправности микроконтроллера и блок включения режима демпфирования и торможения, при этом выход тахогенератора подключен к первому входу микроконтроллера, второй и третий входы которого соединены с соответствующими выходами приемо-передающего устройства, четвертый вход соединен с одним из выходов датчика потребления тока, другой выход которого подключен ко второму входу силового блока, к третьему входу которого подключен выход блока включения режима демпфирования и торможения, пятый вход микроконтроллера соединен с выходом датчика обратной связи положения штока, шестой вход соединен с выходом датчика положения ротора, а выход подключен к блоку проверки исправности микроконтроллера.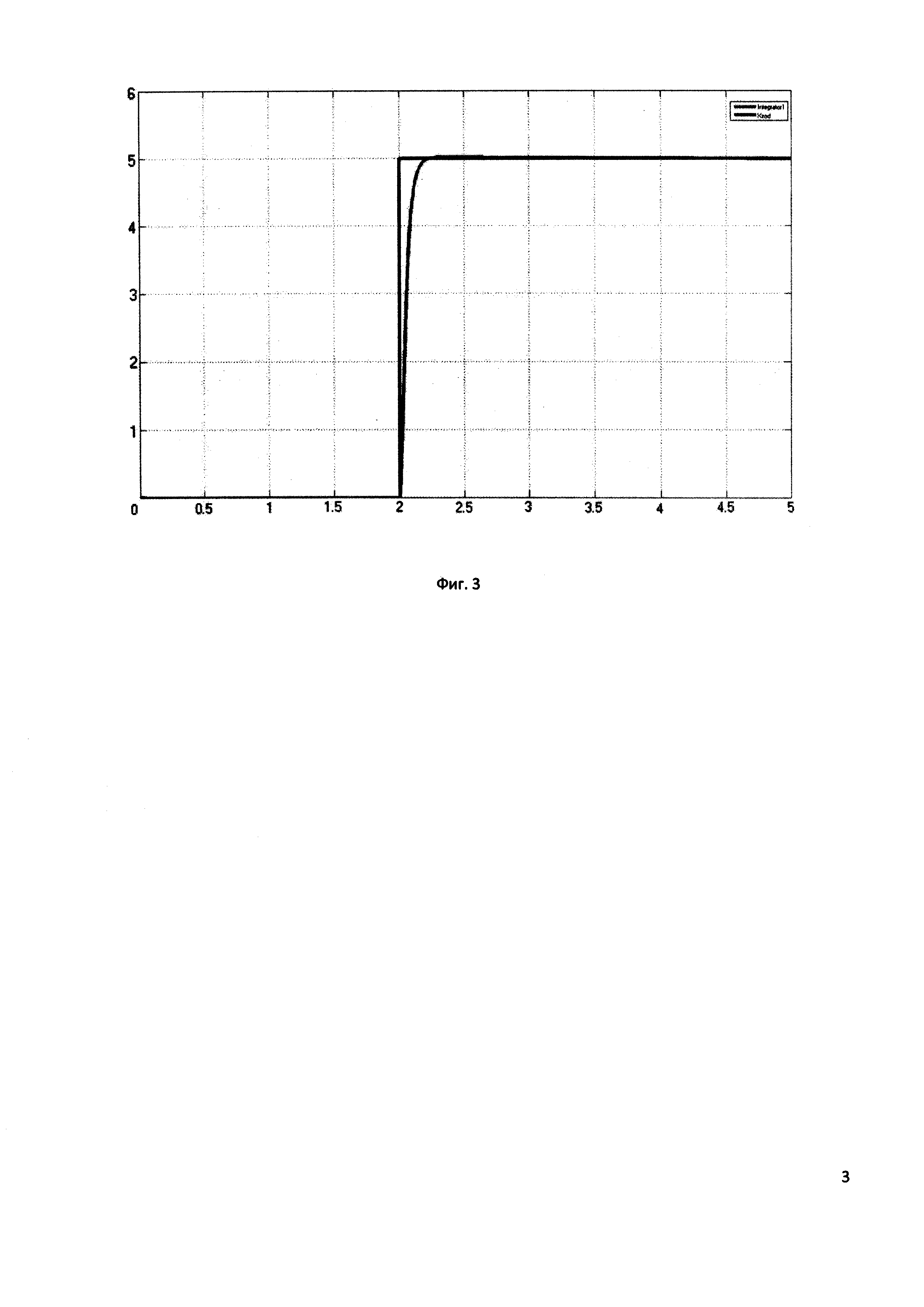
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления

