Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ ОРТЕЗОМ ИЛИ ПРОТЕЗОМ КОЛЕННОГО СУСТАВА
Вид РИД
Изобретение
Изобретение относится к способу управления искусственным ортезом или протезом коленного сустава, на котором располагают компонент голени, и взаимодействующее с ним создающее сопротивление приспособление, содержащее по меньшей мере один исполнительный механизм, с помощью которого изменяют сопротивление сгибанию в зависимости от данных датчиков, которые определяются посредством датчика (7) во время использования ортеза или протеза коленного сустава.
Протезы или ортезы коленных суставов заменяют или поддерживают функционирование естественного коленного сустава. Чтобы добиться максимально оптимальной функциональности искусственного коленного сустава, на рынке имеется множество конструкций, которые воздействуют на поведение коленных суставов в фазе стояния и фазе маха. Известны мехатронные коленные суставы, в которых посредством многочисленных датчиков регистрируются ситуации движения и на основе данных датчиков настраивается создающее сопротивление приспособление, посредством которого изменяется сопротивление сгибанию или сопротивление выпрямлению. Основная проблема состоит в том, что огромное множество возможных ситуаций движения лишь с трудом удается охватить простыми правилами. Поэтому для управления исполнительными и тормозящими механизмами используются высококомплексные, так называемые ситуационные машины, которые имитируют многие разнообразные действия. Недостатком при этом является длительный период разработки и применение дорогостоящих компонентов.
В ЕР 1237513 В1 описано существование или функционирование замещающего конечность поддерживающего приспособления, состоящего по меньшей мере из двух соединенных друг с другом искусственным суставом компонентов и контрольного механизма. Поддерживающее приспособление включает датчик, который регистрирует угол наклона относительно линии силы тяжести одного компонента, соединенного с суставом, и подключен к контрольному механизму. Контрольный механизм расположен таким образом, что на основе переданных датчиком данных относительно угла наклона воздействует на сустав. Датчик угла наклона в варианте осуществления в виде протеза коленного сустава установлен на трубчатом стержне и в дополнение к данным по ситуации может быть установлен другой датчик на голени.
В DE 102008027 639 А1 речь идет об ортезе сустава для поддержания анатомического коленного сустава с верхней частью сустава и нижней частью сустава, которые шарнирно соединены между собой. Предусмотрен запорный элемент для автоматического разблокирования и блокирования ортеза сустава в любом положении, а также исполнительный элемент запорного элемента и сенсорные устройства для регистрации релевантной информации для разблокирования и блокирования. Имеется также блок обработки для анализа собранной полученной информации и передачи этой информации на блок управления и/или регулировки для исполнительного элемента. Сенсорное устройство содержит по меньшей мере два датчика из группы датчиков наклона, угла поворота, ускорения или гироскопы для регистрации информации, которые описывают состояния движения и/или покоя человека. Могут быть выбраны два датчика одного типа или по одному датчику различных типов. Все датчики расположены ниже анатомического сустава, в частности коленного сустава.
Задача предлагаемого изобретения состоит в том, чтобы предложить способ управления искусственным ортезом или протезом коленного сустава, который простым и недорогим образом позволяет получить надежный и удобный характер ходьбы протеза или ортеза.
Согласно изобретению эта задача решается за счет способа с признаками независимого пункта формулы изобретения. Предпочтительные формы осуществления и усовершенствования изобретения раскрываются в зависимых пунктах, описании, а также чертежах.
Способ управления искусственным ортезом или протезом коленного сустава, на котором располагают компонент голени и взаимодействующее с ним создающее сопротивление приспособление, содержащее по меньшей мере один исполнительный механизм, с помощью которого изменяется сопротивление сгибанию в зависимости от данных датчиков, которые определяются с помощью по меньшей мере одного датчика (7) во время использования ортеза или протеза коленного сустава, предусматривает, что исключительно с помощью по меньшей мере одного инерциального датчика определяется абсолютный угол компонента голени, и определенный угол сравнивают по меньшей мере с одним предельным значением и при достижении, в частности превышении, предельного значения сопротивление сгибанию изменяется, в частности, уменьшается. Поэтому можно пренебречь данными датчиков для алгоритма управления, которые регистрируют различные величины измерения, например крутящий момент, силу и угол, последующая обработка которых требует относительно высоких затрат. Ограничение в применении абсолютных углов, которые измеряют посредством одного или нескольких инерциальных датчиков, причем определяется абсолютный угол компонента голени, представляет собой простой и одновременно неожиданно надежный образ действий, позволяющий реализовать управление изменением сопротивления соответствующих приспособлений сопротивления и амортизации в искусственном ортезе или протезе коленного суставе. При этом также предусмотрено, что установлен ряд предельных значений, достижение которых или большее или меньшее значение которых сопряжено с адаптацией сопротивления сгибанию. Вследствие этого может быть достигнута кривая амортизации, которая адаптируется к пациенту и обеспечивает гармоничную картинку ходьбы.
Усовершенствование изобретения предусматривает, что угловую скорость компонента голени вычисляют на основе данных датчиков инерциальных датчиков, и сопротивление сгибанию уменьшается лишь тогда, когда угловая скорость не равна нулю, то есть компонент голени движется в направлении сгибания или разгибания. Таким образом, обеспечивается, что лишь при ходьбе в зависимости от абсолютного угла компонента голени происходит изменение сопротивления. Комбинация абсолютного угла с угловой скоростью для детектирования фазы маха и, следовательно, для определения временной точки, когда сопротивление сгибанию от амортизации фазы стояния уменьшается на амортизацию фазы маха, оказалась надежной также при медленной скорости ходьбы. Комбинация абсолютного угла с угловой скоростью позволяет также надежно определить другие фазы движения при ходьбе, так что сопротивление сгибанию или также сопротивление выпрямлению может настолько измениться по амплитуде, что создается гармоничная картина ходьбы и пациент получает надежную и эффективную поддержку.
Усовершенствование изобретения предусматривает, что абсолютный угол определяют исключительно при помощи одного или нескольких инерциальных датчиков, который или которые закреплены на компоненте голени или на дистально закрепленном на нем ортезном или протезном компоненте. Дистально расположенные ортезные или протезные компоненты представляют собой, в частности, протезные стопы или хомуты или опорные оболочки для естественной стопы при ортезе. Датчик или датчики крепятся предпочтительно медиально или латерально на соответствующем компоненте голени, чтобы определить абсолютный угол компонента голени, то есть его положение относительно неподвижной базовой величины, в частности вертикали.
Абсолютный угол может быть определен при помощи 2D- или 3D-датчиков магнитного поля, 2D- или 3D-датчиков ускорения и/или 1D-, 2D- или 3D-гироскопов. При использовании нескольких датчиков, данные датчиков нескольких инерциальных датчиков могут быть объединены между собой, чтобы на основе нескольких различных сенсорных сигналов надежно установить фактическую ориентацию компонента голени. Точность измерения или помехи в датчиках могут быть скорректированы затем посредством другого или других датчиков.
Предельное значение абсолютного угла компонента голени может быть настроено на значение, которое компонент голени принимает в конце фазы стояния, так что путем индивидуального регулирования могут быть учтены особые соматические свойства пациента. Также может быть учтен предпочтительный образец движения, при этом предельное значение абсолютного угла компетентные техники-ортопеды индивидуально адаптируют к образцу ходьбы пациента. В качестве конца фазы стояния принимается та временная точка в пределах цикла ходьбы, в которой носок ноги при перекате ступни все еще касается земли, непосредственно перед тем, как носок ноги потеряет контакт с землей и поднимается. Обычно коленный сустав при этом сгибается дальше, так что сгибание коленного сустава увеличивает расстояние ступни от земли.
Сопротивление сгибанию может переключаться между двумя установленными значениями, так что имеет место меньшее сопротивление сгибанию на фазе маха и большее сопротивление сгибанию на фазе стояния или в экстренных случаях. Такой экстренный случай может активироваться при падении или спотыкании. При этом предусмотрено повышенное сопротивление сгибанию, чтобы воспрепятствовать незаторможенному сгибанию в колене. Параметры исполнительного механизма выбирают таким образом, что при приложенном моменте сгибания исполнительный механизм не может сработать, чтобы уменьшить амортизацию. Это может быть достигнуто, например, тем, что мощность исполнительного механизма меньше расчетной мощности, которая необходима, чтобы преодолеть реакцию нагруженного моментом сгибания протезного сустава. Таким образом, достигается блокировка исполнительного механизма на основе технического расчета мощности или механического расчета, так что не требуются дополнительные управляющие приспособления или датчики. Если пользователь протеза находится в позиции с согнутым суставом, который нагружен, в связи с выбранной небольшой мощностью исполнительного механизма исключается регулирующее воздействие относительно внутреннего давления системы, что позволяет избежать прерывания амортизации и спонтанного понижения амортизации в потенциально опасных ситуациях, даже если работают другие заданные параметры для изменения амортизации сгибания.
Усовершенствование изобретения предусматривает, что сопротивление сгибанию изменяется, в частности повышается, если угловая скорость достигла нулевой точки и установлена инверсия направления движения компонента голени. Если сопротивление сгибанию повышается в конце маховой фазы сгибания, в этом случае обеспечивается повышенная безопасность относительно непроизвольного сгибания при столкновении с преградой. Если пациент споткнулся, повышение сопротивления сгибанию делает возможным, что пациент может опереться на снабженную ортезом или протезом ногу, без сгибания при этом коленного сустава. Если в конце фазы маха установлена инверсия направления движения, сопротивление сгибанию может снизиться, чтобы обеспечить начальное сгибание на фазе стояния. Изменение направления движения в конце маховой фазы может быть установлено тем, что угловая скорость находится на нулевой точке и абсолютный угол уменьшается.
На основе данных инерциального датчика можно определить также угловую скорость компонента голени, при этом предусмотрено, что при превышении предельного значения сопротивление сгибанию повышается или не понижается. Это служит для опознания чрезвычайных ситуаций, например при спотыкании. Угловую скорость определяют преимущественно при прямом движении, так что могут быть зарегистрированы и учтены наиболее частые ситуации при ходьбе. При превышении углового ускорения выше граничного значения может быть сообщено, что гармоничное движение ходьбы прервано, так что целесообразно другое значение амортизации, нежели значение амортизации на фазе маха. Как правило, в этом случае рекомендуется повысить амортизацию сгибания или оставить на высоком значении.
Ниже поясняется более детально пример осуществления изобретения на основе чертежей. При этом показаны:
фиг. 1 - схематичное изображение протезного устройства,
фиг. 2 - схема последовательности операций управления,
фиг. 3 - диаграмма угла голени.
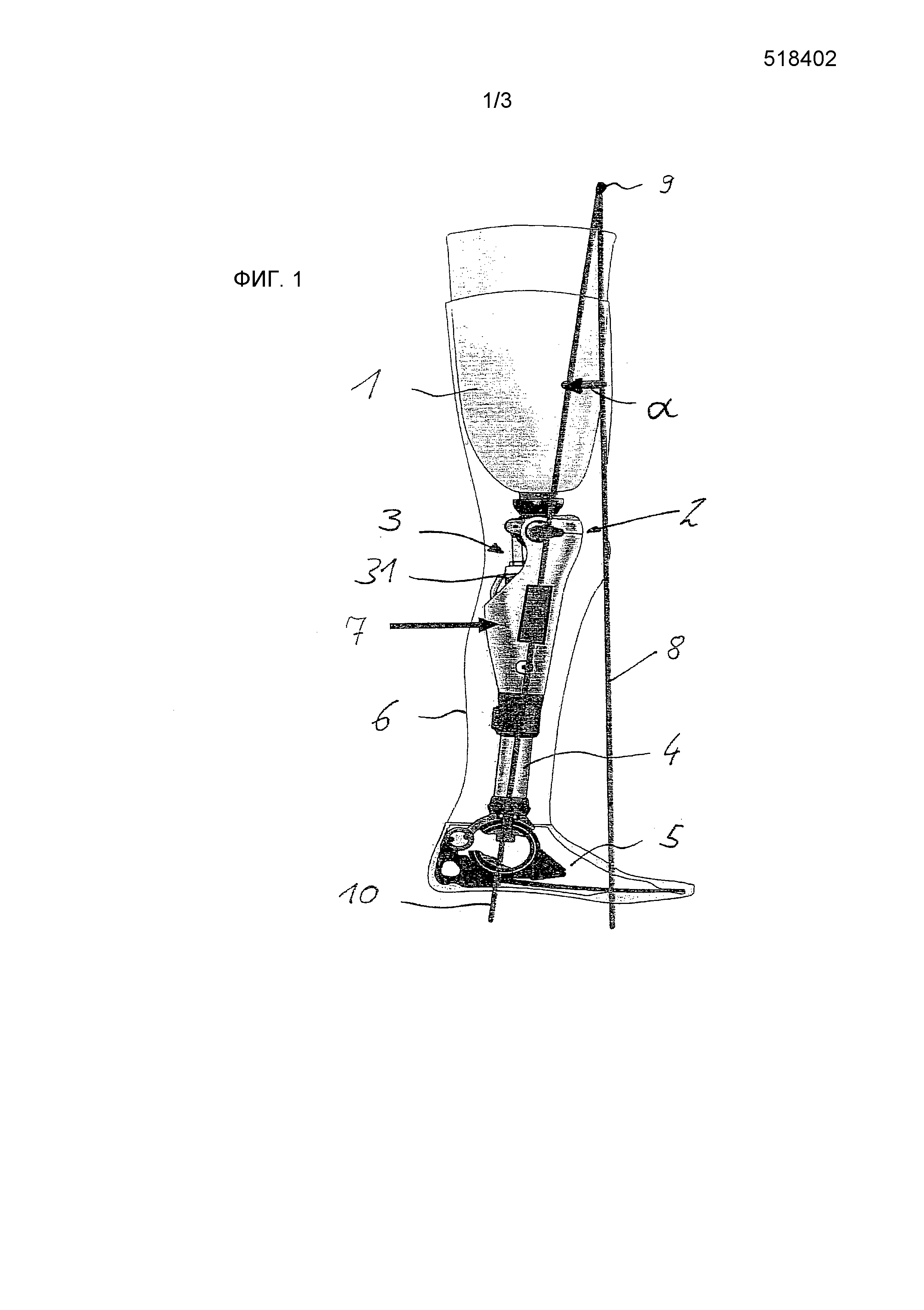
На фиг. 1 в схематичном изображении предусмотрен протез ноги с протезным стержнем 1 для приема культи голени и для крепления протеза ноги на пациенте. На дистальном конце протезного стержня 1 расположен протезный коленный сустав 2, который выполнен с создающим сопротивление приспособлением 3, например, в форме гидравлического амортизатора или петлевого пружинного тормоза. На дистальном конце протезного коленного сустава 2 предусмотрены трубка голени 4 и протезная стопа 5 как другие дистальные компоненты. Функциональные элементы, такие как протезный стержень 1, протезный коленный сустав 2, трубка голени 4, а также протезная стопа 5, покрыты косметикой 6, чтобы создать в целом максимально возможное, естественное впечатление.
На компоненте голени, состоящем из дистальной части протезного коленного сустава 2, трубки голени 4 и протезной стопы 5, в предлагаемом примере осуществления расположен инерциальный датчик 7 в виде датчика угловых отклонений. Инерциальный датчик 7 может быть выполнен в виде датчика магнитного поля, датчика ускорения или гироскопа. На компоненте голени могут быть установлены также несколько инерциальных датчиков 7, например, дополнительно к установке на дистальной части протезного коленного сустава 2 на трубке 4 голени или протезной стопе 5. Датчики ускорения и датчики магнитного поля могут быть выполнены в виде 2D- или 3D-датчиков, для определения гироскопических данных гироскоп может быть выполнен как 1D-, 2D- или 3D-гироскоп. Несколько инерциальных датчиков аналогичного типа могут быть установлены на компоненте голени, инерциальные датчики другого типа, например датчик ускорения или гироскоп, также могут быть установлены на компоненте голени.
Инерциальный датчик 7, выполненный в виде датчика угла, определяет значение угла компонента голени относительно линии 8 центра тяжести, проходящей через центр 9 силы тяжести. Центр 9 силы тяжести соответствует центру тяжести тела пациента, и угол α определяется между линией 8 центра тяжести и продольной протяженностью компонента голени через центр 9 тяжести тела в вытянутом положении протезного коленного сустава 2 в конце фазы стояния. Ориентация компонента голени на фиг. 1 определяется посредством соединительной прямой 10 вдоль продольной протяженности трубки голени 4 через ось качаний протезного коленного сустава 2. В представленной позиции протезный коленный сустав 2 находится в разогнутом положении в конце фазы стояния. Показанный здесь угол α компонента голени относительно линии 8 центра тяжести сохранен в памяти как предельное значение. Этому значению соответствуют разгибание протезного коленного сустава 2, а также тазобедренного сустава и, следовательно, положение ноги в шаге с наклоном назад, и пользователь протеза может надежно инициировать маховую фазу. Если одновременно может быть обнаружен процесс переката протезной стопы 5 вперед, что сказывается на угловой скорости α'>0 и увеличении угла, то это определяет также шаг вперед. На основании этих данных исполнительный механизм 31 создающего сопротивление приспособления 3 протезного коленного сустава 2 активируется таким образом, что уменьшается действующая амортизация фазы стояния и удерживается на низком значении до тех пор, пока угловая скорость α' не достигнет в средней маховой фазе нулевой точки. На основании опытных данных может быть установлен угловой диапазон для позиции компонента голени в конце маховой фазы нормального шага. Если полный шаг не выполнен, то есть не достигнут угловой диапазон, или установлено негармоничное изменение угловой скорости α', исполнительный механизм 31 воздействует на создающее сопротивление приспособление 3 таким образом, что происходит повышенное сопротивление сгибанию. Если прерванный шаг продолжается, может быть выполнено новое понижение сопротивления сгибанию, чтобы завершить шаг до конца.
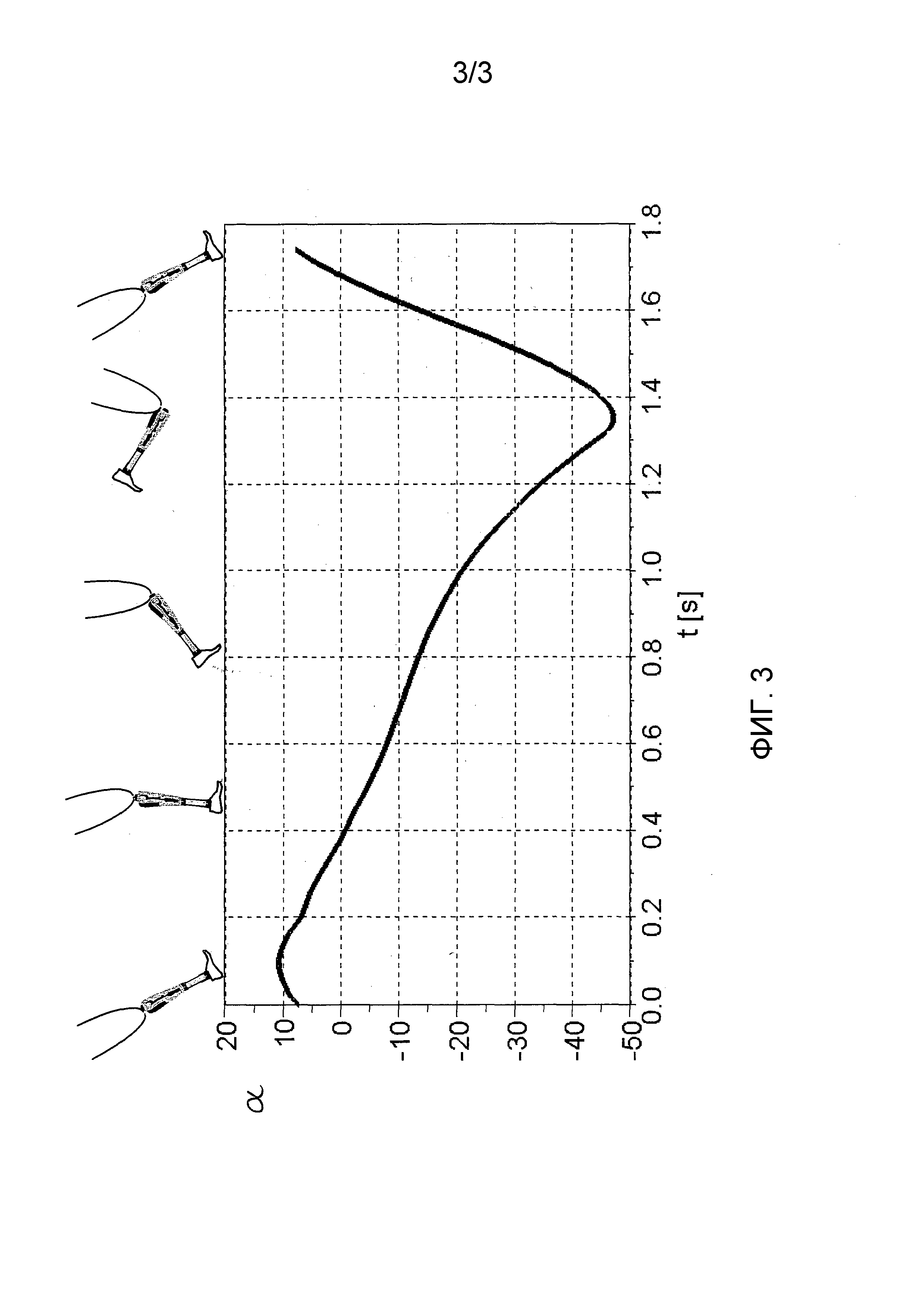
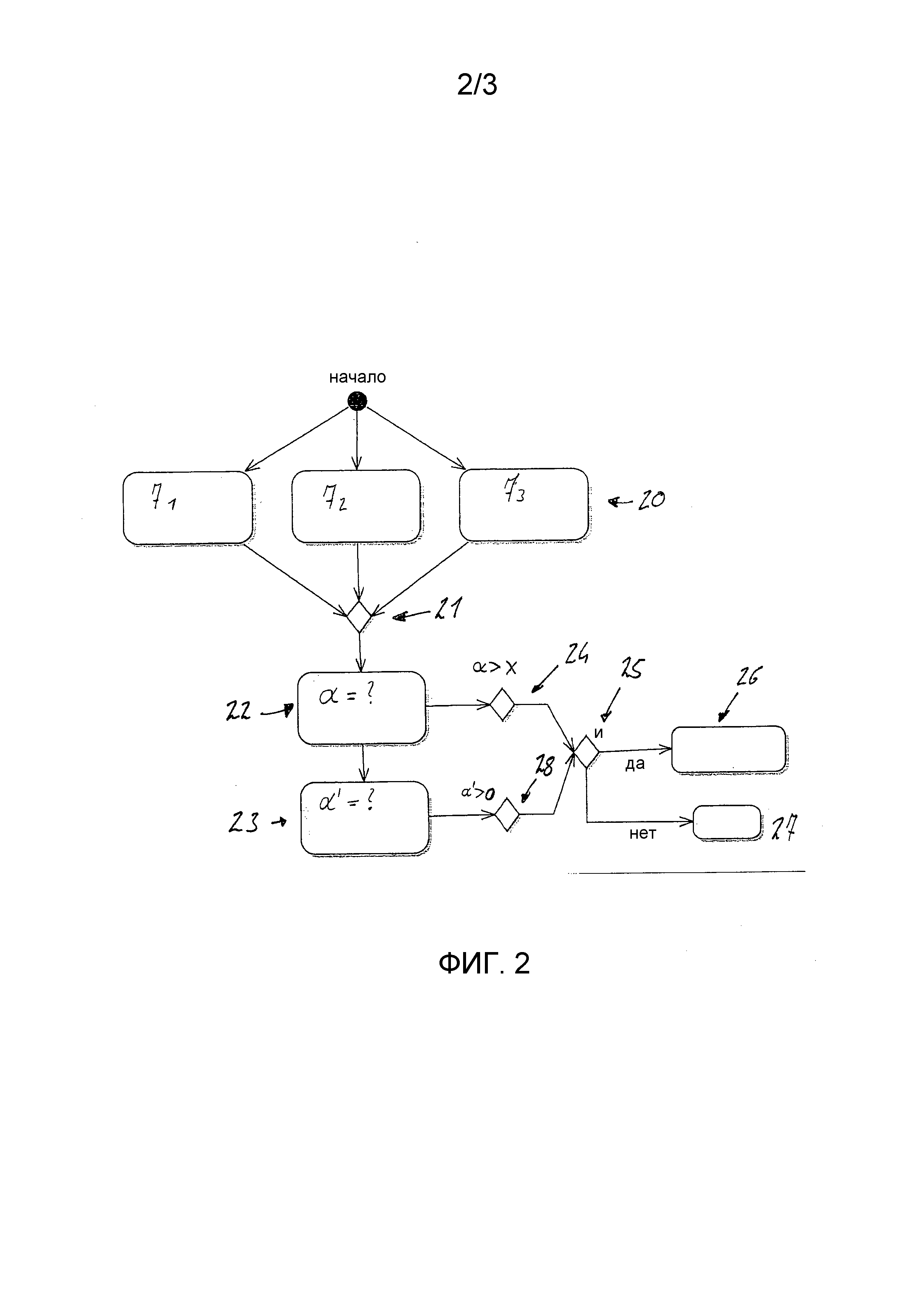
На фиг. 2 в форме графика представлен принцип функционирования управления. После инициирования управления на первой стадии 20 определяется соответствующее значение датчика. Посредством инерциальных датчиков 7 может быть измерен ряд значений датчиков 71, 72, 73. Наряду с возможностью определить три значения датчиков 71, 72, 73 компонента голени, например, посредством трех различных инерциальных датчиков угла 7, таких как датчик магнитного поля, датчик ускорения и гироскоп, имеется также возможность определить ряд значений датчиков посредством нескольких однотипных инерциальных датчиков 7. В принципе, значение датчика можно зарегистрировать только одним инерциальным датчиком 7.
Полученные инерциальными датчиками 7 данные объединяются на последующей стадии 21, чтобы скорректировать неточности и чтобы иметь максимально полное положение по данным для вычисления абсолютного угла α. Если предусмотрен лишь один инерциальный датчик 7, объединять данные не требуется.
На следующей стадии 22 анализа и обработки на основе данных датчиков 71, 72, 73 рассчитывают угол α компонента голени относительно линии 8 силы тяжести. Параллельно, на другой стадии 23 может быть рассчитана также угловая скорость α' компонента голени.
Рассчитанный, например, с помощью фильтра Кальмана угол α относительно линии 8 силы тяжести сравнивают затем на следующей стадии 24 с предварительно установленным предельным значением Х. Если абсолютный угол α больше предварительно установленного предельного значения Х, в случае управления, в котором угловая скорость α' не учитывается, исполнительный механизм 31 активируют на следующей стадии 26, так что устройство амортизации 3 принимает уменьшенное сопротивление для инициирования фазы маха. Если предельное значение не достигнуто, исполнительный механизм на альтернативной стадии 25 соответственно не включается и создающее сопротивление приспособление 3 остается неизменным.
Если на стадии 23 вместе с углом α рассчитывают также угловую скорость α' и угловая скорость α' больше нуля, то на стадии 28 обнаруживается движение ходьбы. На стадии 25 объединения угол α и угловую скорость α' объединяют друг с другом, если предельные значения достигнуты или превышены, то исполнительный механизм на стадии 26 активируется. И если одно из предельных значений для угла α или угловой скорости α' не достигнуто, то исполнительный механизм на стадии 27 не активируется.
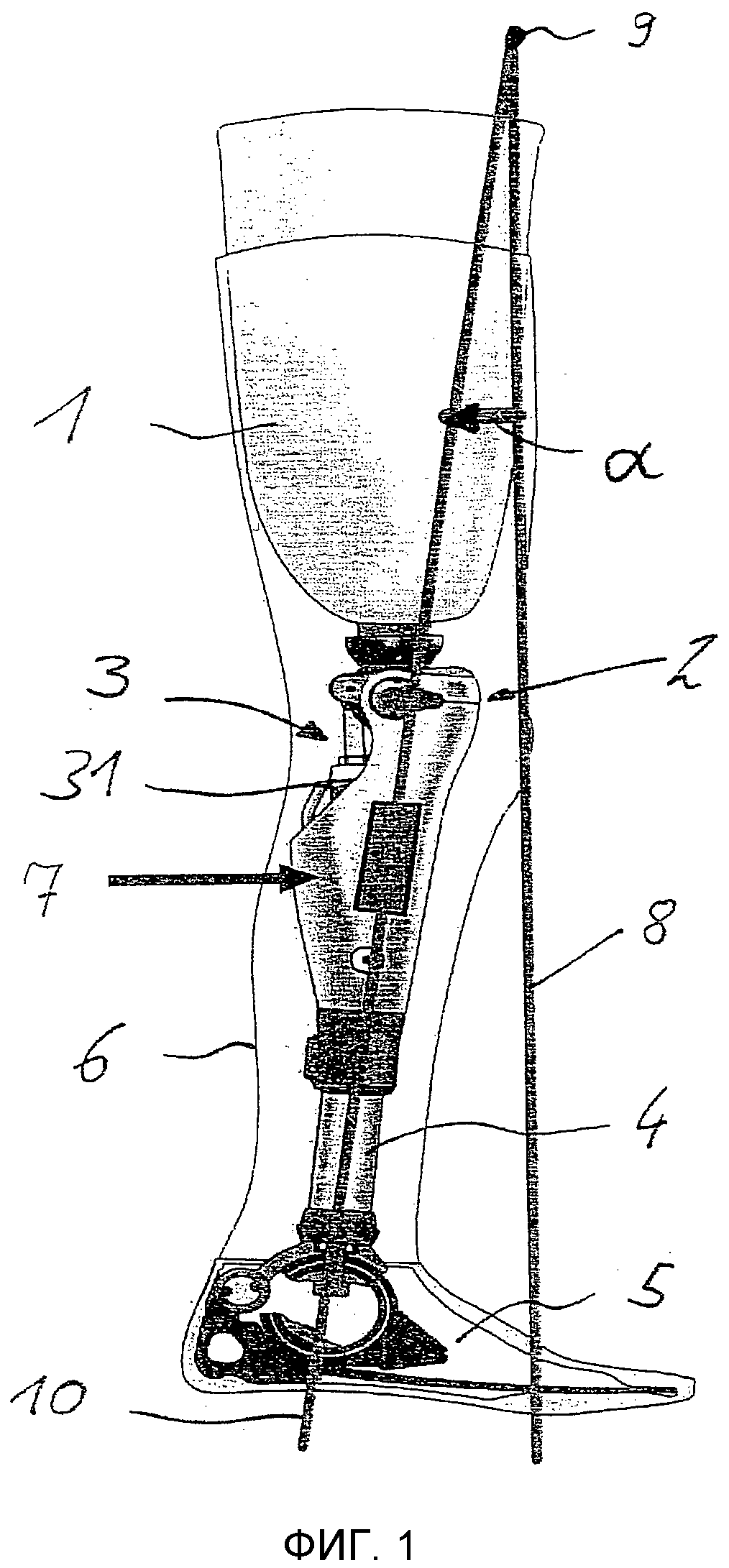
На фиг. 3 изображена диаграмма угла голени α по времени. Над диаграммой изображены отдельные позиции в рамках шагового цикла. Шаг начинается постановкой пятки, так называемым ударом пятки, вследствие чего угол голени α вначале несколько повышается. В ходе дальнейшего шага протезная стопа наступает полностью, и голень или компонент голени через примерно 0,4 секунды достигает вертикали, так что угол голени α составляет 0°. При дальнейшем движении вперед, голень или компонент голени наклоняется дальше, так что значение угла голени α увеличивается. На уровне примерно 0,8 секунды достигается конец фазы стояния, носок протезной стопы покидает опору, так что инициируется сгибание маховой фазы. В конце маховой фазы при нормальной ходьбе с углом голени 45° достигается точка инверсии. Это происходит примерно на уровне 1,3 секунд. Затем следует инверсия движения, величина угла голени α уменьшается и приближается к вертикали, пока примерно на уровне 1,7 секунд не достигает вновь вертикали и затем посредством выпрямления стопы вперед вновь наклоняется относительно вертикали, но на этот раз в пределах позитивного углового диапазона. По характеристике угла голени α могут быть установлены несколько предельных значений для этого угла голени α. Если эти предельные значения достигаются или составляют большие или меньшие величины, в зависимости от того, в каком направлении смотреть на предельную величину, может быть осуществлено изменение сопротивления сгибанию, в частности, после достижения максимального угла сгибания может увеличиться сопротивление сгибанию, чтобы обеспечить защиту относительно непроизвольного и незаторможенного сгибания коленного сустава при спотыкании. По поводу положения голени относительно вертикали, может осуществляться простое и эффективное управление амортизации создающего сопротивление приспособления.
Выяснилось, что вышеописанный простой алгоритм может быть хорошо использован для переключения туда и обратно между амортизацией фазы стояния и амортизацией маховой фазы. Особенно надежным является управление, когда угловое значение α превышает предварительно сохраненное в памяти предельное значение, которое регулируется нажатием кнопки управления на протезном устройстве, если пациент находится в смещенном назад относительно центра тяжести положении и угловая скорость α' больше нуля. Если присутствуют оба обстоятельства, создающее сопротивление приспособление 3, например, путем переключения гидравлического клапана или разблокировкой тормозного устройства может быть переключено с высокой амортизации фазы стояния на меньшую амортизацию сгибания на фазе маха.
Использование исключительно инерциальных датчиков снижает затраты, так как базирующиеся на тензодатчиках датчики моментов для альтернативных способов обходятся очень дорого. Кроме того, инерциальные датчики угла свободны от износа.
Рядом с первым отводом сигнала угла для определения угловой скорости может находиться также второй отвод сигнала угла для определения углового ускорения. Сигнал ускорения может быть использован для обнаружения падения, превышение углового ускорения сверх установленного граничного значения может индицировать, что прервано гармоничное движение ходьбы и будет целесообразнее другое амортизирующее значение, как правило, повышение сопротивления сгибанию.
Далее, на основе наблюдения угловых характеристик можно сделать вывод также о скорости ходьбы, кроме того, изменения сопротивления и, следовательно, изменения амортизации на фазе маха переключаются бинарно между двумя значениями не только туда и обратно, но переключение может регулироваться в очень коротких временных интервалах для дискретных угловых значений или для каждого углового значения или каждого считывания углового значения. Например, гидравлические клапаны регулируются пошагово, или подтормаживающие приспособления, которые могут применяться также как создающие сопротивление приспособления, регулируются подгонкой, чтобы добиться гармоничной картинки ходьбы.
Далее, на основе угловой характеристики может регулироваться создающее сопротивление приспособление, так что при постановке пятки с выпрямленным суставом обеспечивается сгибание на фазе стояния за счет снижения сопротивления сгибанию. При наступании также может быть предусмотрено последовательное изменение амортизации, так что вслед за уменьшением сгибания на фазе стояния после постановки пятки следует сильно возросшая амортизация, которая позволяет сгибание после постановки пятки до определенного углового значения, кроме того, исключается дальнейшее увеличение угла за счет изменения устройства сопротивления.
Искусственные коленные суставы могут использоваться в форме протезов, как показано в примере осуществления, а также в форме ортезов. Создающие сопротивление приспособления могут быть выполнены как простые блокировки, комплексные гидравлические или петлевые пружинные тормоза. Благодаря учету угловой скорости α могут быть использованы также приводы, чтобы обеспечить дополнительно сгибание или выпрямление. Для защиты от нежелательного сгибания или уменьшения амортизации под нагрузкой, то есть при приложенном моменте сгибания, исполнительный механизм может быть рассчитан по мощности таким образом, что при наступившем моменте сгибания подаваемая разрывная мощность выключателя превышает отдаваемую мощность исполнительного механизма, так что снижение амортизации и одновременное с ним мгновенное сгибание не могут осуществляться.
Абдукционный ортез для руки
Протез стопы
Торсионное устройство экзопротеза
Способ соединения по меньшей мере двух структурных конструктивных элементов ортопедического компонента и ортопедический компонент по меньшей мере с двумя структурными конструктивными элементами
Способ получения прочно окрашенного изделия с силиконовой поверхностью и окрашенное изделие, полученное этим способом
Вкладыш протеза и система гильзы протеза с вкладышем протеза и гильзой протеза
Протез
Соединительная система и протезная система
Протез с приемной гильзой протеза
Протезное устройство
Способ регулировки давления
Ортез
Голеностопный ортез
Чехол для протеза и протез

