Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ
Вид РИД
Изобретение
Изобретение относится к автоматическому управлению подводными объектами с использованием судовых спускоподъемных устройств.
Известно устройство для управления подводным объектом [SU 714606 А1, МПК5 H02P 5/06, опубл. 05.02.1980], содержащее судовую лебедку, на барабан которой запасован верхний конец кабель-троса, его нижний конец через гермоввод соединен с подводным объектом, а также устройство управления приводом судовой лебедки, к входам которого подключены выходы задатчика и измерительных преобразователей скорости качки грузового блока лебедки и глубины погружения подводного объекта.
Указанное техническое решение не обеспечивает быстродействие контура управления подводным объектом на больших глубинах из-за упругих свойств кабель-троса и появления резонансов. Кроме того, резко сокращается срок службы кабель-троса из-за его частых изгибных деформаций при сматывании-наматывании на барабан лебедки, так как кабель-трос при прохождении через блоки допускает всего 1000-2000 изгибов.
Известно устройство для управления подводным объектом [RU 2114756 С1, МПК6 B63B 27/08, опубл. 10.07.1998], содержащее судовую лебедку, установленную на судне, и амортизирующую лебедку, установленную на подводном объекте. Указанные лебедки соединены гибкой связью, состоящей из кабель-троса и каната, причем один конец каната заведен на барабан амортизирующей лебедки, а другой прикреплен замковым соединением к кабель-тросу. Один конец кабель-троса заведен на барабан судовой лебедки, а второй - соединен с корпусом подводного объекта. Вход первого управляющего блока подключен к задатчику скорости судовой лебедки, а выход - ко входу электропривода судовой лебедки. Первый вход второго управляющего блока через кабель-трос и токосъемник подключен к задатчику среднего значения длины каната, а выход - ко входу электропривода амортизирующей лебедки. Второй и третий входы второго управляющего блока подключены соответственно к выходам измерительных преобразователей длины и скорости каната.
Это изобретение не исключает появление ударных воздействий на подводный объект при достижении предельных изменений длины каната.
Известно устройство для управления подводным объектом [RU 2261191, С1, МПК7 B63B 27/08, опубл. 27.09.2005], содержащее установленную на судне судовую лебедку и установленную на подводном объекте амортизирующую лебедку, на барабан которой заведен один конец каната, а другой посредством замкового соединения прикреплен к кабель-тросу, один конец которого заведен на барабан судовой лебедки, а другой прикреплен к корпусу подводного объекта с образованием петли на участке между объектом и замковым соединением. Вход первого управляющего блока подключен к задатчику скорости судовой лебедки, а выход - ко входу электропривода судовой лебедки. Выход второго управляющего блока подключен ко входу электропривода амортизирующей лебедки, а второй и третий входы подключены соответственно к выходам измерительных преобразователей длины каната, смотанного с барабана амортизирующей лебедки, и скорости каната относительно подводного объекта. Вход первого вычислительного блока подключен к выходу измерительного преобразователя длины каната, а его первый и второй выходы подключены соответственно к первому и второму входам второго вычислительного блока, третий вход которого через кабель-трос и токосъемник подключен к задатчику среднего значения длины каната, а выход подключен к первому входу второго управляющего блока.
В этом изобретении для погружения и стабилизации подводного объекта в условиях морской качки формируют дополнительные перемещения подводного объекта на основе сигнала, полученного по косвенному показателю - математическому ожиданию изменения длины каната. Для вычисления этого показателя требуется определенное время, приводящее к запаздыванию дополнительного перемещения подводного объекта.
Известно устройство для управления подводным объектом [RU 2495784 С1, МПК B63B 27/08, опубл. 20.10.2013], выбранное в качестве прототипа, содержащее установленную на судне-носителе судовую лебедку и установленную на подводном объекте амортизирующую лебедку, на барабан которой заведен один конец каната, а другой посредством замкового соединения прикреплен к кабель-тросу, один конец которого заведен на барабан судовой лебедки, а другой прикреплен к корпусу подводного объекта с образованием петли между этим объектом и замковым соединением. Вход первого управляющего блока подключен к задатчику скорости судовой лебедки, а выход - ко входу электропривода судовой лебедки, на валу которого установлены барабан и токосъемник. Второй управляющий блок подключен ко входу электропривода амортизирующей лебедки, на валу которого установлены барабан и измерительный преобразователь длины каната, выход которого подключен ко входу первого вычислительного блока, первый и второй выходы которого подключены соответственно к первому и второму входам второго вычислительного блока, который третьим входом через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан и первый вход токосъемника связан с задатчиком среднего значения длины каната. Выход второго вычислительного блока подключен к первому входу второго управляющего блока. Выход измерительного преобразователя скорости вертикального перемещения подводного объекта подключен к первому входу сравнивающего устройства, второй вход которого через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан и второй вход токосъемника связан с задатчиком скорости судовой лебедки, а выход подключен ко второму входу второго управляющего блока.
Это изобретение не обеспечивает высокую точность стабилизации положения подводного объекта на заданной глубине в связи с большой погрешностью измерения малых вертикальных скоростей перемещения подводного объекта от действия морской качки.
Задачей изобретения является повышение точности стабилизации положения подводного объекта на требуемой глубине в условиях действия морской качки.
Поставленная задача решена за счет того, что устройство для управления погружением подводного объекта, так же как в прототипе, содержит амортизирующую лебедку, установленную на подводном объекте и установленную на судне-носителе судовую лебедку, на барабан которой заведен один конец кабель-троса, другой конец которого прикреплен к корпусу подводного объекта с образованием петли между замковым соединением и креплением. Вход первого управляющего блока подключен к задатчику скорости судовой лебедки, а выход первого управляющего блока соединен с входом электропривода судовой лебедки, на валу которого установлены барабан и токосъемник. Второй управляющий блок подключен ко входу электропривода амортизирующей лебедки, на валу которого установлены барабан и измерительный преобразователь длины каната, выход которого подключен ко входу первого вычислительного блока, первый и второй выходы которого подключены соответственно к первому и второму входам второго вычислительного блока, который третьим входом через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан судовой лебедки и первый вход токосъемника связан с задатчиком среднего значения длины каната. Выход второго вычислительного блока подключен к первому входу второго управляющего блока. Выход измерительного преобразователя скорости вертикального перемещения подводного объекта подключен к первому входу сравнивающего устройства, второй вход которого через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан и второй вход токосъемника связан с задатчиком скорости судовой лебедки.
В отличие от прототипа к выходу сравнивающего устройства подключен первый вход переключателя, второй вход которого подключен к выходу датчика отклонения натяжения каната. Выход переключателя подключен ко второму входу второго управляющего блока. На барабан амортизирующей лебедки намотан нижний конец каната, верхний конец которого связан с датчиком отклонения натяжения каната, который через металлический стержень соединен с замковым соединением.
Устройство для управления подводным объектом позволяет стабилизировать его положение на заданной глубине за счет измерения датчиком отклонения натяжения каната и формирования на его основе в управляющем блоке сигнала на электропривод амортизирующей лебедки, обеспечивающей компенсацию влияния морской качки на подводный объект и тем самым стабилизацию его положения с высокой точностью.
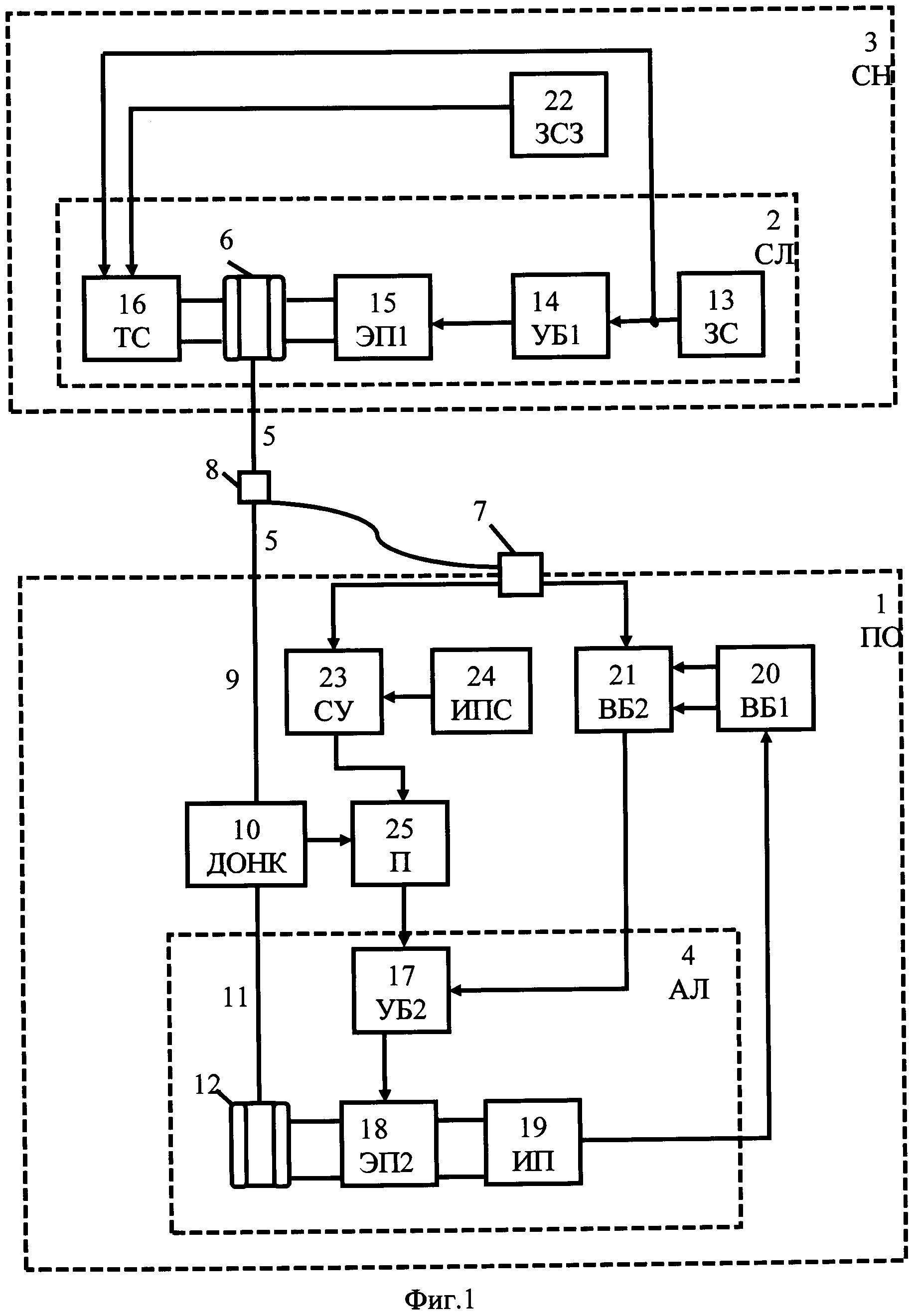
На фиг. 1 представлена схема заявляемого устройства для управления подводным объектом.
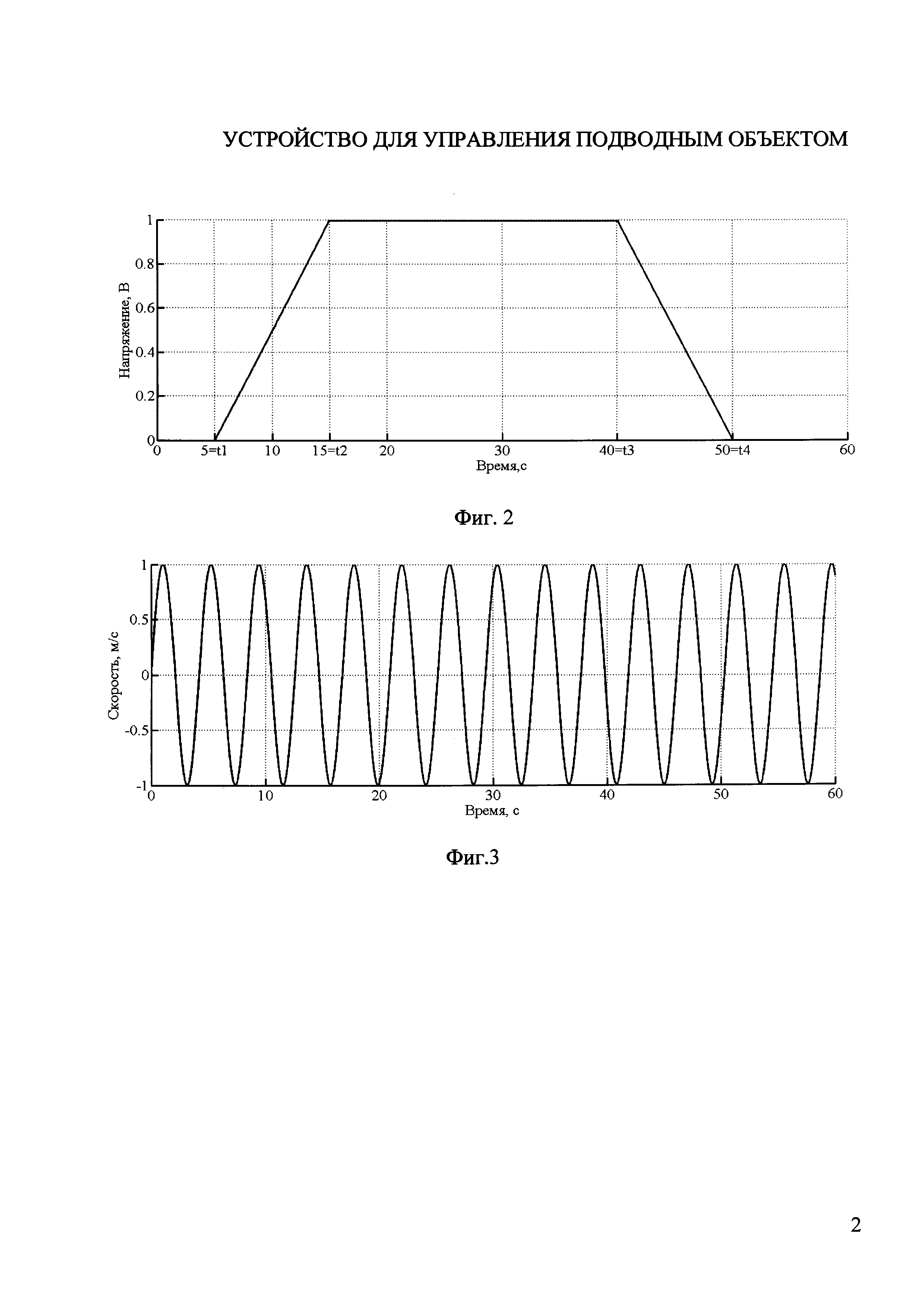
На фиг. 2 представлен вид сигнала задатчика скорости судовой лебедки.
На фиг. 3 представлен сигнал скорости вертикального перемещения судна-носителя под действием морской качки.
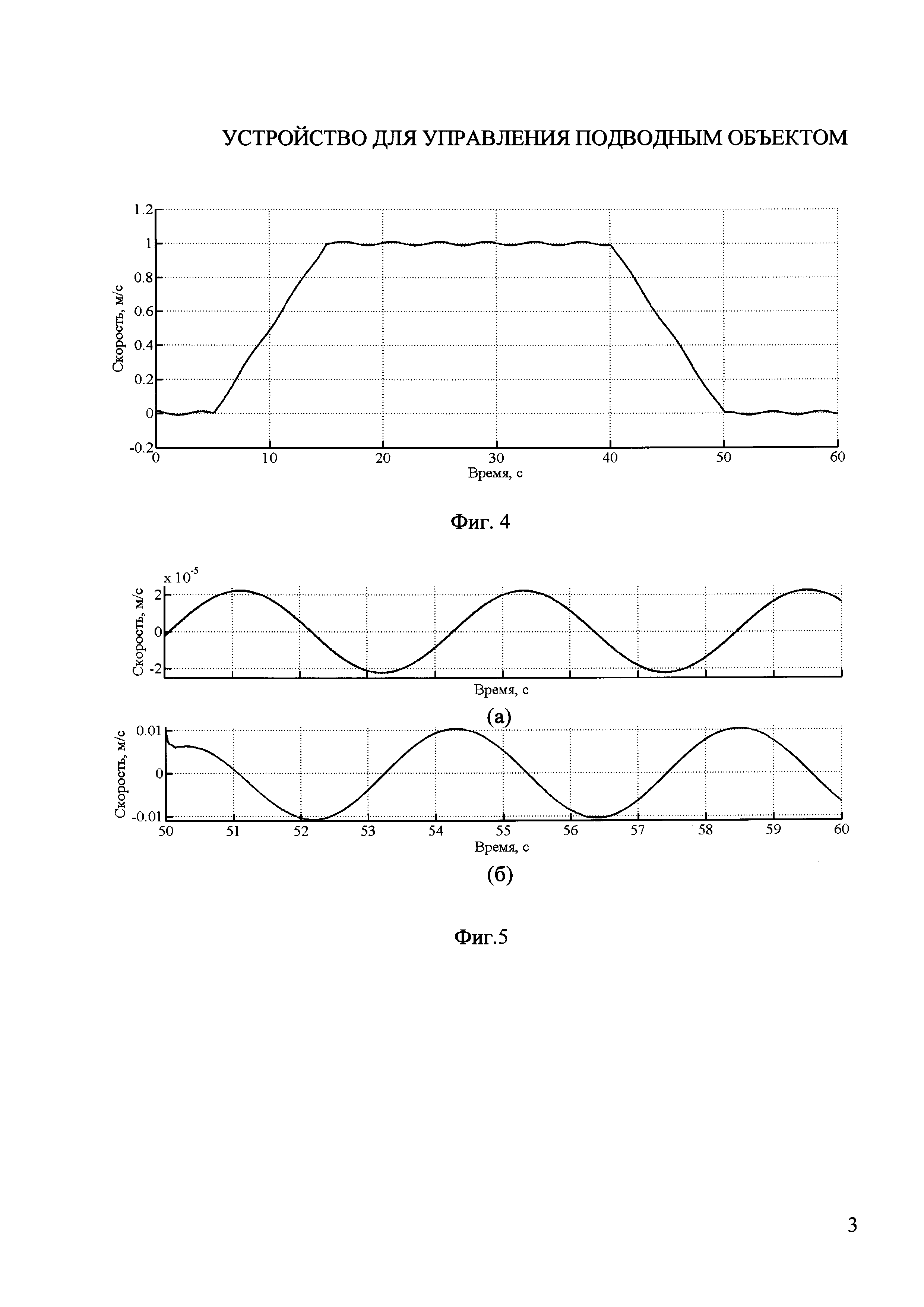
На фиг. 4 представлен сигнал скорости вертикального перемещения подводного объекта в режиме погружения при морской качке с использованием заявляемого устройства.
На фиг. 5 представлены графики сигналов скорости вертикального перемещения подводного объекта при морской качке, где а) - при стабилизации положения подводного объекта по сигналу отклонения натяжения каната, б) - при стабилизации по сигналу разностей скоростей судовой лебедки и подводного объекта.
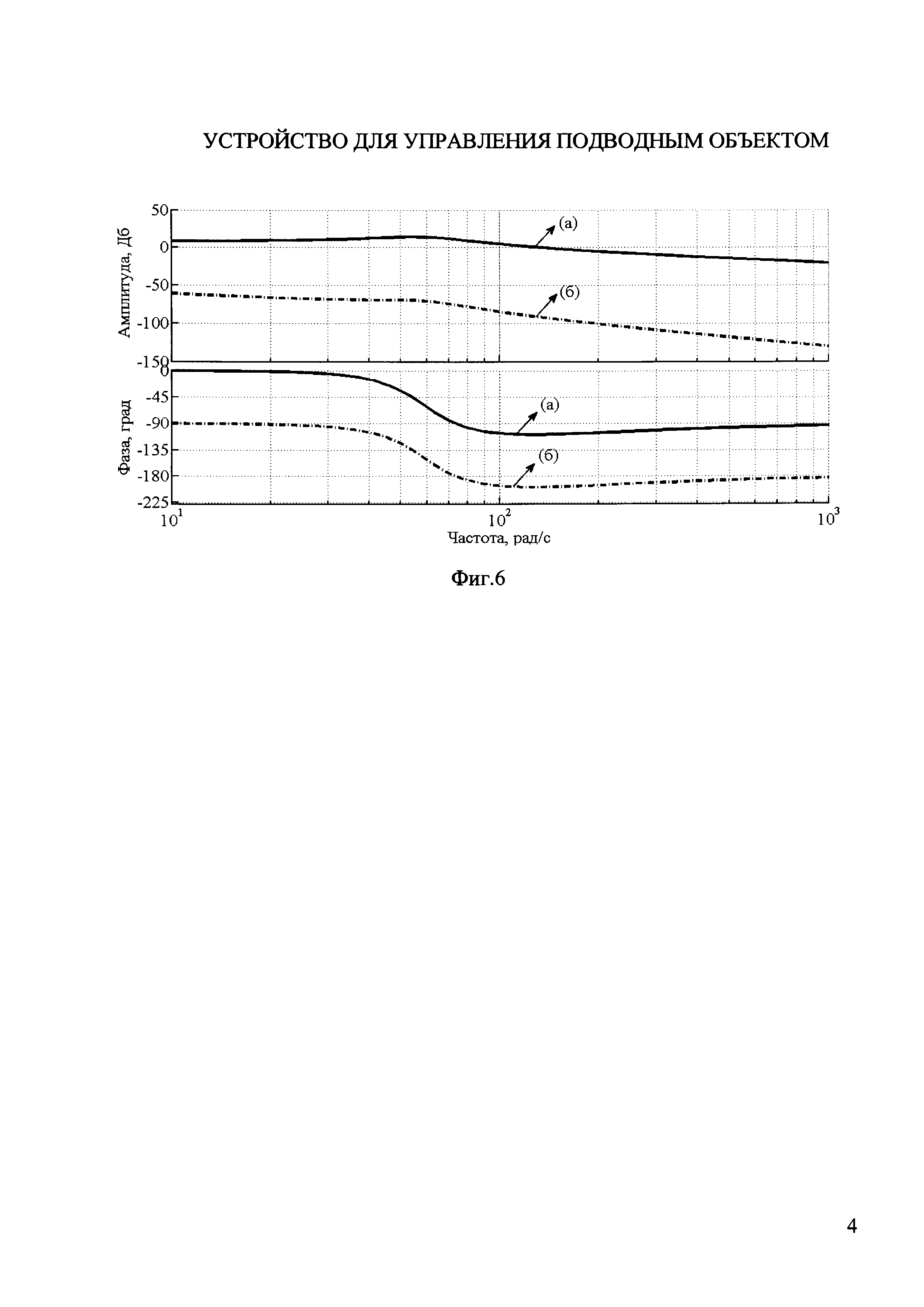
На фиг. 6 представлены графики частотных характеристик, где а) - при стабилизации положения подводного объекта по сигналу отклонения натяжения каната, б) - при стабилизации положения подводного объекта по сигналу разностей скоростей судовой лебедки и подводного объекта.
Устройство управления подводным объектом 1 (ПО) содержит судовую лебедку 2 (СЛ) (фиг. 1), установленную на судне-носителе 3 (СН), и амортизирующую лебедку 4 (АЛ), установленную на подводном объекте 1 (ПО). Кабель-трос 5 верхним концом намотан на барабан 6 судовой лебедки 2 (СЛ), а нижний конец кабель-троса 5 через крепление 7 прикреплен к корпусу подводного объекта 1 (ПО) с образованием петли между замковым соединением 8 и креплением 7. Верхний конец кабель-троса 5 через замковое соединение 8 и металлический стержень 9 связан с датчиком отклонения натяжения каната 10 (ДОНК). Верхний конец каната 11 связан с датчиком отклонения натяжения каната 10 (ДОНК), а нижний конец каната 11 намотан на барабан 12 амортизирующей лебедки 4 (АЛ).
Задатчик скорости 13 (ЗС) судовой лебедки 2 (СЛ) соединен с входом первого управляющего блока 14 (УБ1), выход которого связан с управляющим входом электропривода 15 (ЭП1) судовой лебедки 2 (СЛ). На валу электропривода 15 (ЭП1) судовой лебедки 2 (СЛ) установлены барабан 6 и токосъемник 16 (ТС).
Выход второго управляющего блока 17 (УБ2) подключен ко входу электропривода 18 (ЭП2) амортизирующей лебедки 4 (АЛ). На валу электропривода 18 (ЭП2) установлены барабан 12 и измерительный преобразователь 19 (ИП) длины каната 11. Выход измерительного преобразователя 19 (ИП) подключен ко входу первого вычислительного блока 20 (ВБ1), первый и второй выходы которого соединены соответственно с первым и вторым входами второго вычислительного блока 21 (ВБ2). Третий вход второго вычислительного блока 21 (ВБ2) через крепление 7, нижний конец кабель-троса 5, замковое соединение 8, верхний конец кабель-троса 5, барабан 6 и первый вход токосъемника 16 (ТС) связан с задатчиком среднего значения 22 (ЗСЗ) длины каната 11, смотанного с барабана 12. Выход второго вычислительного блока 21 (ВБ2) связан с первым входом второго управляющего блока 17 (УБ2).
К первому входу сравнивающего устройства 23 (СУ) подключен выход измерительного преобразователя скорости вертикального перемещения 24 (ИПС) подводного объекта 1 (ПО). Второй вход сравнивающего устройства 23 (СУ) связан с задатчиком скорости 13 (ЗС) судовой лебедки 2 (СЛ) через крепление 7, нижний конец кабель-троса 5, замковое соединение 8, верхний конец кабель-троса 5, барабан 6 и второй вход токосъемника 16 (ТС). Выход сравнивающего устройства 23 (СУ) подключен к первому входу переключателя 25 (П), второй вход которого подключен к выходу датчика отклонения натяжения каната 10 (ДОНК) натяжения каната 11. Выход переключателя 25 (П) подключен к входу второго управляющего блока 17 (УБ2).
В качестве электроприводов 15 (ЭП1), 18 (ЭП2) могут быть использованы электроприводы серии ЭПВ, выпускаемые предприятием «Электропривод». В состав электроприводов 15 (ЭП1), 18 (ЭП2) входят управляющие блоки 14 (УБ1) и 17 (УБ2), которые реализованы в виде усилителя полупроводникового линейного нереверсивного. В состав электропривода 15 (ЭП1) входит задатчик скорости 13, который представляет собой S-образный задатчик интенсивности. В качестве токосъемника 16 (ТС) может быть использован кольцевой токосъемник с двумя сигнальными контактами серии. 1ST-SR060 компании «Kubler». Измерительный преобразователь 19 (ИП) длины каната 11 представляет собой датчик перемещения, выполненный на базе контактных потенциометрических преобразователей или на базе индуктивных, кодовых или иных бесконтактных преобразователей. Вычислительные блоки 20 (ВБ1) и 21 (ВБ2) могут быть представлены в виде контроллера или микроконтроллера. В качестве задатчика среднего значения 22 (ЗСЗ) длины каната можно использовать задатчик ручной РЗД-12. Сравнивающее устройство 23 (СУ) выполнено на базе операционного усилителя с отрицательной обратной связью. В качестве измерительного преобразователя скорости вертикального перемещения 24 (ИПС) можно использовать преобразователь скорости «Зенит-ИГП», выпускаемый ОАО «НТП НАВИ - ДАЛС».
В качестве переключателя 25 (П) может быть использован электронный коммутатор сигналов NM2113, а в качестве датчика отклонения натяжения каната 10 (ДОНК) - динамометр растяжения ДОР-3-100И (2).
Для проверки работоспособности устройства управления подводным объектом 1 (ПО) проведено моделирование процессов управления в условиях морской качки с помощью приложения Simulink в пакете Matlab. Для этого выбраны минимальное и максимальное значения длины каната 11, равные соответственно 2 метра и 20 метров [Г.Е. Кувшинов, Л.А. Наумов, К.В. Чупина. Система управления глубиной погружения буксируемых объектов. Владивосток: Дальнаука, 2006 - 270 с.]. Вес подводного объекта 1 (ПО) был принят 5860 кг [Г.Е. Кувшинов, Л.А. Наумов, К.В. Чупина. Система управления глубиной погружения буксируемых объектов. Владивосток: Дальнаука, 2006. - 294 с.].
Работа судовой лебедки 2 (СЛ) определяется сигналом задатчика скорости 13 (ЗС) (фиг. 2) [Г.Е. Кувшинов, Л.А. Наумов, К.В. Чупина. Система управления глубиной погружения буксируемых объектов. Владивосток: Дальнаука, 2006 - 225 с.] и имеет режим разгона на интервале времени (t1-t2), режим работы с постоянной скоростью (t2-t3) и режим торможения (t3-t4). С момента времени t4 начинается режим стабилизации положения подводного объекта 1 (ПО).
В режиме погружения при поступлении сигнала задатчика скорости 13 (ЗС) на управляющий блок 14 (УБ1) электропривода 15 (ЭП1) судовая лебедка 2 (СЛ) начинает сматывать кабель-трос 5 с барабана 6 со скоростью, пропорциональной сигналу задатчика скорости 13 (ЗС). При этом подводный объект 1 (ПО), соединенный канатом 11 через датчик отклонения натяжения каната 10 (ДОНК), металлический стержень 9, замковое соединение 8 с кабель-тросом 5, начинает совершать вертикальное перемещение вниз.
В режиме погружения при отсутствии качки судна-носителя 3 (СН) скорость вертикального перемещения подводного объекта 1 (ПО) будет совпадать со скоростью судовой лебедки 2 (СЛ). В этом случае сигнал с измерительного преобразователя скорости 24 (ИПС) подводного объекта 1 (ПО) будет равен сигналу с задатчика скорости 13 (ЗС) судовой лебедки 2 (СЛ) и выходной сигнал сравнивающего устройства 23 (СУ) будет равен нулю.
Влияние морской качки моделируется гармоническим сигналом скорости подъема и опускания судна-носителя 3 (СН) с амплитудой 1 м/с и частотой 1,5 рад/с (фиг. 3).
В режиме погружения сигнал измерительного преобразователя скорости 24 (ИПС) подводного объекта 1 (ПО) вычитается в сравнивающем устройстве 23 (СУ) из сигнала задатчика скорости 13 (ЗС) судовой лебедки 2 (СЛ). Выходной сигнал сравнивающего устройства 23 (СУ) проходит через переключатель 25 (П), управляющий блок 17 (УБ2) и поступает на электропривод 18 (ЭП2) амортизирующей лебедки 4 (АЛ), которая будет сматывать или наматывать канат 11 на барабан 12 в соответствии с сигналом сравнивающего устройства 23 (СУ). В результате амплитуда колебаний скорости подводного объекта 1 (ПО) от действия морской качки существенно снижается и имеет максимальное значение 0,01 м/с (фиг. 4).
При достижении подводным объектом 1 (ПО) заданной глубины погружения (35 метров) сигнал задатчика скорости 13 (ЗС) судовой лебедки 2 (СЛ) отключают и судовая лебедка 2 (СЛ) останавливается. С помощью переключателя 25 (П) режим работы переключают с режима погружения на режим стабилизации положения подводного объекта 1 (ПО) в условиях морской качки. В этом режиме измеряют отклонение натяжения каната от значения, соответствующего весу подводного объекта 1 (ПО), с помощью датчика отклонения натяжения каната 10 (ДОНК) и его выходной сигнал подается на управляющий блок 17 (УБ2). Во время подъема судна-носителя 3 (СН) на волне натяжение в канате 11 возрастает, датчик отклонения натяжения каната 10 (ДОНК) измеряет значение положительного отклонения натяжения в канате 11, и после его усиления в управляющем блоке 17 (УБ2) амортизирующая лебедка 4 (АЛ) сматывает трос с барабана 12, не давая тем самым подниматься подводному объекту 1 (ПО). При опускании судна-носителя 3 (СН) на волне натяжение в канате 11 уменьшается, датчик отклонения натяжения каната 10 (ДОНК) измеряет значение отрицательного отклонения натяжения в канате 11 и после его усиления в управляющем блоке 17 (УБ2) амортизирующая лебедка 4 (АЛ) наматывает трос на свой барабан 12, что препятствует опусканию подводного объекта 1 (ПО). Таким образом, обеспечивается демпфирование морской качки и сохранение практически неподвижного состояния подводного объекта 1 (ПО) на заданной глубине (максимальная скорость вертикального перемещения подводного объекта при амплитуде морской качки 1 м/с составляет всего 2,2×10-5 м/с, (фиг. 5, а). Если же в режиме стабилизации положения подводного объекта использовать способ управления, как в прототипе, по сигналу разностей скоростей судовой лебедки 2 (СЛ) и подводного объекта 1 (ПО), то подводный объект будет совершать вертикальные колебания со значительно большей скоростью, равной 0,01 м/с, что подтверждается путем проведенного моделирования (фиг. 5, б).
Анализ частотных характеристик по сигналу отклонения натяжения каната 11 (фиг.6, а) и по сигналу разностей скоростей судовой лебедки 2 (СЛ) и подводного объекта 1 (ПО) (фиг. 6, б) показывает, что управление по сигналу отклонения натяжения каната 11 обеспечивает больший запас устойчивости, что увеличивает точность стабилизации положения подводного объекта 1 (ПО).
Устройство для управления подводным объектом, содержащее амортизирующую лебедку, установленную на подводном объекте и установленную на судне-носителе судовую лебедку, на барабан которой заведен один конец кабель-троса, другой конец которого прикреплен к корпусу подводного объекта с образованием петли между замковым соединением и креплением, вход первого управляющего блока подключен к задатчику скорости судовой лебедки, а выход первого управляющего блока соединен с входом электропривода судовой лебедки, на валу которого установлены барабан и токосъемник, второй управляющий блок подключен ко входу электропривода амортизирующей лебедки, на валу которого установлены барабан и измерительный преобразователь длины каната, выход которого подключен ко входу первого вычислительного блока, первый и второй выходы которого подключены соответственно к первому и второму входам второго вычислительного блока, который третьим входом через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан судовой лебедки и первый вход токосъемника связан с задатчиком среднего значения длины каната, а выход второго вычислительного блока подключен к первому входу второго управляющего блока, выход измерительного преобразователя скорости вертикального перемещения подводного объекта подключен к первому входу сравнивающего устройства, второй вход которого через крепление, нижний конец кабель-троса, замковое соединение, верхний конец кабель-троса, барабан и второй вход токосъемника связан с задатчиком скорости судовой лебедки, отличающееся тем, что к выходу сравнивающего устройства подключен первый вход переключателя, второй вход которого подключен к выходу датчика отклонения натяжения каната, при этом выход переключателя подключен ко второму входу второго управляющего блока, на барабан амортизирующей лебедки намотан нижний конец каната, верхний конец которого связан с датчиком отклонения натяжения каната, который через металлический стержень соединен с замковым соединением.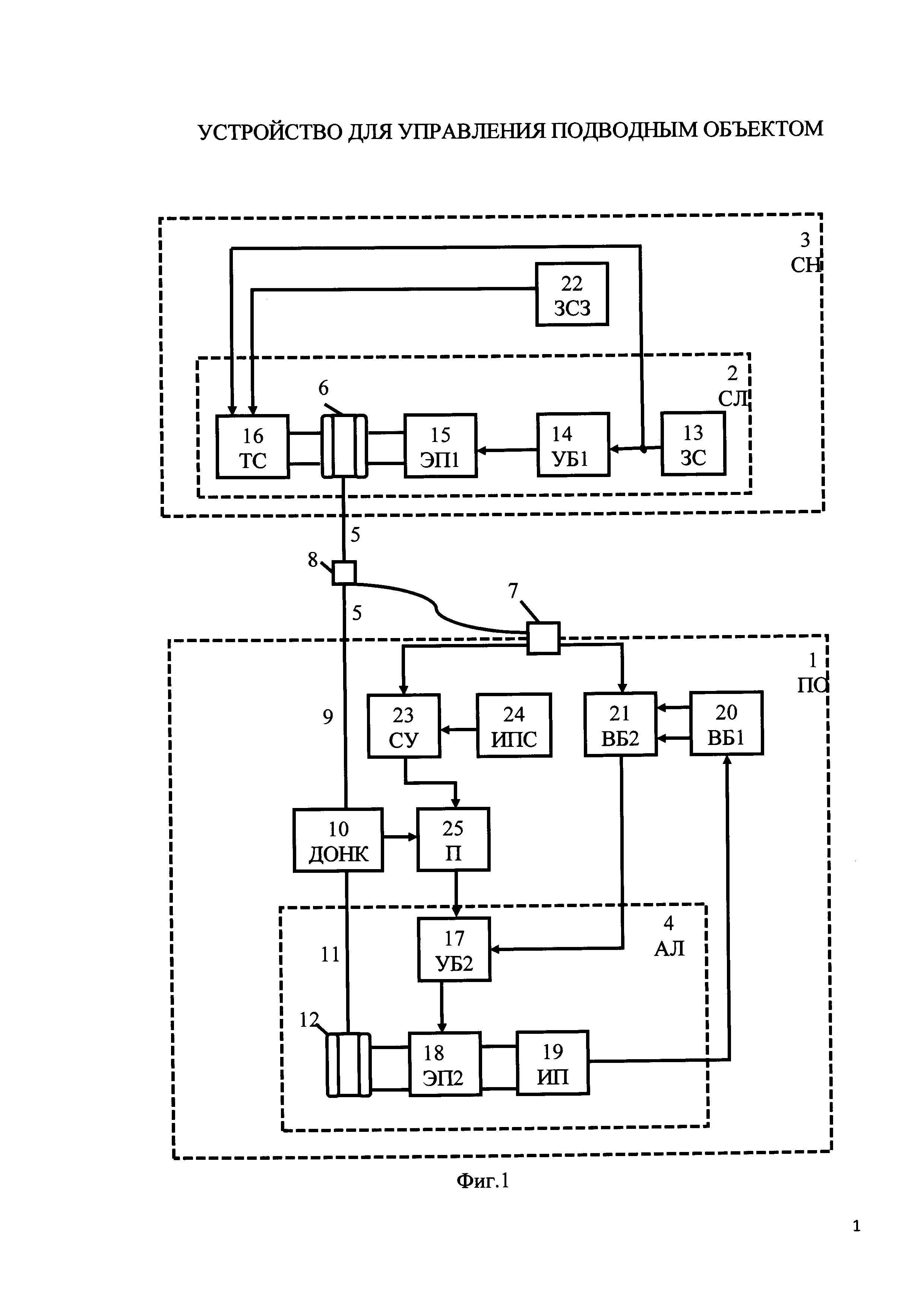
Сверхпроводящий быстродействующий выключатель
Способ получения водорастворимой композиции наночастиц серебра
Резонансный свч компрессор
Электромагнитный привод тормоза форсированного пуска асинхронного двигателя
Устройство для генерации последовательно движущихся капель жидкости
Ионный диод с магнитной самоизоляцией
Способ переработки растворов после карбонатного вскрытия вольфрамовых руд
Водогрейный жаротрубный котёл с турбулизаторами улиточного типа
Устройство для оценки потока газа, переносимого всплывающими пузырьками, выходящими из дна водоемов
Транзисторный преобразователь частоты
Способ получения водорастворимой композиции наночастиц серебра
Резонансный свч компрессор
Электромагнитный привод тормоза форсированного пуска асинхронного двигателя
Устройство для генерации последовательно движущихся капель жидкости
Ионный диод с магнитной самоизоляцией
Способ переработки растворов после карбонатного вскрытия вольфрамовых руд
Водогрейный жаротрубный котёл с турбулизаторами улиточного типа
Устройство для оценки потока газа, переносимого всплывающими пузырьками, выходящими из дна водоемов
Транзисторный преобразователь частоты
Электроразрядный способ разрушения горных пород

