Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА АКТИВНОМ УЧАСТКЕ ЕГО ВЫВЕДЕНИЯ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ
Вид РИД
Изобретение
Изобретение относится к космонавтике, в частности к области управления движением космического аппарата (КА) вектором тяги двигательной установки на активном участке выведения на орбиту искусственного спутника планеты (ИСП).
Актуальность разработки способов управления КА на активных участках выведения на орбиты искусственного спутника планет обуславливается следующими обстоятельствами. При формировании спутниковых орбит КА одной из основных задач является обеспечение минимума потребных энергетических затрат. Это позволяет увеличить долю полезной нагрузки в общем весовом балансе КА и тем самым повысить эффективность выполнения целевых программ космических миссий. Кроме того, в связи с повышением активности исследования дальнего космоса и подготовки экспедиций, включающих посадку на поверхность планет и последующий взлет КА с поверхности, представляется необходимым в разработке адаптивных способов управления КА применительно к решению задачи старта и выведения аппарата на спутниковые орбиты планеты.
Известен способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты, описанный в работе - Сихарулидзе Ю.Г. «Баллистика летательных аппаратов», М.: Наука, 1982 - [1], стр. 60-61. Указанный способ заключается в том, что при подготовке к старту в бортовой компьютер КА вводится начальный угол крена, соответствующий азимуту прицеливания. После отделения КА от наземной пусковой установки начинается отработка запрограммированного разворота по углу крена для обеспечения требуемого угла азимута прицеливания. Затем осуществляется отработка программы тангажа: сначала реализуется вертикальный взлет, а после этого обеспечивается отклонение траектории движения КА от вертикали за счет формирования отрицательного угла атаки. Причем угол атаки зависит от параметров формируемой орбиты и от текущего состояния полета КА. Такое управление заканчивается к моменту достижения скорости КА, соответствующей числу Маха, приблизительно равному 0,8; после этого осуществляется полет с углом атаки, близким к нулю до формирования требуемой спутниковой орбиты. Принципиально, такой способ управления может обеспечить обратную связь между текущим состоянием полета КА и программой управления на активном участке движения и тем самым повысить надежность управления.
Основными недостатками данного способа являются следующие. Во-первых, в рамках его реализации отсутствует обоснование энергетической оптимальности программы управления углом атаки, которая, очевидно, будет различна в зависимости от задаваемых исходных данных и краевых условий, что в ряде случаев может привести к чрезмерному перерасходу топлива, потребного на формирование заданных орбит. Во-вторых, программа полета КА на участке взлета не учитывает влияние кориолисовых и переносных сил, что при определенных обстоятельствах может привести к потере устойчивости движения аппарата.
Известен из работы [1], стр. 68-82, способ, являющийся совершенствованием способов управления КА на активном участке выведения на орбиту ИСП, связанных с поиском квазиоптимальных режимов полета. Указанный известный способ заключается в использовании квазиоптимальных программ управления углом тангажа, полученных с учетом введения ряда допущений и упрощения математических моделей движения КА. Программа управления предусматривает следующие этапы: движение КА на участке взлета с углом тангажа, равным 90° (что соответствует нулевому углу атаки в предположении совпадения направления вектора тяги с продольной осью КА); уменьшение угла тангажа за счет полета КА с отрицательным углом атаки α; полет с постоянным значением угла тангажа, что в условиях уменьшения угла наклона вектора скорости КА к местному горизонту, соответствует движению с монотонно возрастающим углом атаки α; скачок угла тангажа за счет еще большего увеличения угла атаки; полет с практически линейным уменьшением угла тангажа, что соответствует полету КА с углом атаки, близким к нулю. Такой способ управления обеспечивает снижение потребных энергетических затрат при выведении КА на заданную спутниковую орбиту. Кроме того, при обосновании данного способа показано, что квазиоптимальная программа изменения угла тангажа справедлива как для управления одноступенчатыми КА, так и многоступенчатыми аппаратами, выводимыми на спутниковые орбиты.
Вместе с тем, данный способ управления также имеет ряд существенных недостатков. Во-первых, представленная программа изменения угла тангажа была разработана с учетом введения ряда допущений для упрощенной системы уравнений движения КА. В связи с этим, применение такой программы в реальных условиях, где необходимо учитывать всю совокупность действующих на КА сил, а также в условиях воздействия возмущающих факторов может привести к потере устойчивости движения КА, в первую очередь на вертикальном участке полета. Во-вторых, в рамках описания данного способа управления отсутствуют алгоритмы определения оптимальных управляющих функций (углов тангажа или углов атаки) в зависимости от проектных характеристик КА и параметров формируемых орбит. Отсутствие универсального подхода к выбору квазиоптимальных программ адаптивного управления приводит к необходимости определения управляющих функций для каждого конкретного набора исходных данных путем итерационного решения вариационных задач, что усложняет применение данного способа управления. В-третьих, данный способ не предусматривает возможности проведения оперативных коррекций управляющих функций на конечном участке выведения КА, что в ряде случаев может привести к существенному снижению точности формирования спутниковых орбит.
Известен по патенту SU №1838177, публикация 30.08.1993, способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты - [2].
Сущность этого известного способа заключается в старте космического аппарата с поверхности планеты и его отделении от пусковой установки, в развороте космического аппарата по крену для обеспечения требуемого угла азимута, в определении текущих значений координат движения космического аппарата, а именно: скорости полета V, угла наклона вектора скорости к местному горизонту θ, расстояния между центром планеты и центром масс космического аппарата r, угла между проекцией вектора скорости на местный горизонт и местной параллелью ε, геоцентрической широты подспутниковой точки космического аппарата φ, массы космического аппарата m, плотности атмосферы на высоте полета космического аппарата ρ, аэродинамического ускорения а, кориолисовых и переносных ускорений космического аппарата, в осуществлении на участке вертикального полета космического аппарата его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с зависимостью:

где V - скорость движения космического аппарата;
Р - тяга двигательной установки;
m - масса космического аппарата;
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество космического аппарата;
ε - угол между проекцией вектора скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
γ - угол крена космического аппарата;
ω - угловая скорость вращения планеты.
После возрастания аэродинамического ускорения до величины, превышающей суммарное значение кориолисовых и переносных ускорений более чем на порядок, реализуют режим управления КА, где угол α определяется по формуле α=C1/q. Здесь С1 - константа, имеющая отрицательный знак, характеризующая конструктивные особенности выводимого на орбиту космического аппарата и определяемая крутизну траектории полета; q - скоростной напор, действующий на КА в процессе его полета в атмосфере. Такое управление обеспечивается до конца активного участка выведения КА на спутниковую орбиту.
Возможность сокращения массы топлива (в способе-прототипе), потребной для разгона КА до заданной скорости на участке вертикального взлета, обуславливается следующими факторами. На начальном участке движения достаточно продолжительное время осуществляется вертикальный полет, при этом изменение управляющего угла α определяется из рассмотрения дифференциального уравнения, характеризующего зависимость угла наклона вектора скорости к местному горизонту от времени:
где θ - угол наклона вектора скорости космического аппарата к местному горизонту.
Для реализации вертикального полета θ=90° угол α рассчитывается из условия равенства нулю функции dθ/dt=0 (при этом cos θ=cos 90°=0, sin θ=1):

На протяжении всего вертикального участка полета угол α не превышает ~0,1°, следовательно, осуществляется разгон КА с практически максимальной интенсивностью: при выработке определенного количества топлива скорость КА для такого способа управления будет больше, чем для способов-аналогов.
После того как скорость КА возрастает до некоторой величины (порядка нескольких сотен м/с) влияние кориолисовых и переносных ускорений на динамику полета будет значительно снижено, т.е. необходимость их учета при определении программного управления α отпадает. В этот момент КА, достигший значительной кинетической энергии, целесообразно отклонить от вертикали путем реализации программы: α=C1/q. Выбором константы С1 из диапазона С1<C1max обеспечивается требуемая крутизна траектории активного участка полета, зависящая от параметров формируемой орбиты, а также дальности падения отработанных частей первой ступени (при использовании многоступенчатых КА).
Устойчивость движения КА обуславливается наличием обратной связи текущего вектора состояния и управляющего воздействия. Эта связь учитывает все силы, оказывающие влияние на траекторию движения КА.
Рассматриваемый способ-прототип, наряду с сокращением потребных энергозатрат на формирование спутниковых орбит и повышением устойчивости управления КА обеспечивает высокое быстродействие принятия управленческих решений. Это достигается путем использования безитерационных и универсальных расчетных зависимостей, в которых начальные условия КА, азимуты (наклонения) старта, массовые и энергетические характеристики входят в явном виде в соотношения для определения управляющего угла α. Вышеперечисленное дает возможность реализации управления движением КА в режиме времени, близком к реальному.
Данному способу (по патенту SU №1838177) присуща совокупность признаков, наиболее близкая к совокупности существенных признаков изобретения, он является наиболее близким аналогом, и посему выбран в качестве прототипа.
Недостатки способа-прототипа следующие. Во-первых, при использовании режима управления в соответствии с зависимостью α=C1/q, угол α принимает чрезмерно большие по модулю значения в процессе полета КА в верхних слоях атмосферы, где скоростной напор существенно снижается. Это приводит к перерасходу энергозатрат на формирование заданных орбит. Во-вторых, предлагаемый способ не предусматривает возможности алгоритмического выбора управляющих функций на заключительном этапе полета в зависимости от высот формируемых орбит и проектных параметров КА. Это также приводит как к перерасходу энергозатрат (при определенной совокупности исходных условий), так и к снижению оперативности принятия управленческих решений на завершающем участке полета. В-третьих, способ управления не предполагает проведения оперативных коррекций движения КА, компенсирующих возможные погрешности отработки программ управления тягой двигательной установки и влияния случайных возмущающих факторов. Все это может привести к снижению точности формирования спутниковых орбит.
Задачей, на решение которой направлено изобретение, является создание способа управления движением КА на активном участке выведения на орбиту, обладающего достоинством способа-прототипа с точки зрения реализации высокого уровня устойчивости движения и оперативности определения управляющих воздействий на участках вертикального взлета и гравитационного разворота и, кроме того, обеспечивающего снижение потребных энергозатрат и повышение точности формирования орбит за счет рационального управления КА на заключительном участке полета.
Технический результат, который обеспечивается изобретением, заключается в повышении эффективности управления ракетодинамическими силами на активном участке выведения КА на орбиты искусственного спутника планет.
Сущность заявляемого способа управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты заключается в старте космического аппарата с поверхности планеты и его отделении от пусковой установки, в развороте космического аппарата по крену для обеспечения требуемого угла азимута, в определении текущих значений координат движения космического аппарата, а именно: скорости полета V, угла наклона вектора скорости к местному горизонту θ, расстояния между центром планеты и центром масс космического аппарата r, угла между проекцией вектора скорости на местный горизонт и местной параллелью ε, геоцентрической широты подспутниковой точки космического аппарата φ, массы космического аппарата m, плотности атмосферы на высоте полета космического аппарата ρ, аэродинамического ускорения а, кориолисовых и переносных ускорений космического аппарата, в осуществлении на участке вертикального полета космического аппарата его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с зависимостью:

где V - скорость движения космического аппарата;
Р - тяга двигательной установки;
m - масса космического аппарата;
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество космического аппарата;
ε - угол между проекцией вектора скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
γ - угол крена космического аппарата;
ω - угловая скорость вращения планеты,
при возрастании значения аэродинамического ускорения а до величины, превышающей суммарное значение кориолисовых и переносных ускорений космического аппарата более чем в десять раз, осуществляют его перевод на участок гравитационного разворота траектории движения космического аппарата путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением:
α=С1/q,
где q - скоростной напор, действующий на космический аппарат в процессе его движения в атмосфере;
С1 - константа, имеющая отрицательный знак, характеризующая конструктивные особенности выводимого на орбиту космического аппарата и определяемая крутизну траектории полета,
при этом на участке гравитационного разворота траектории движения космического аппарата определяют значения гравитационного ускорения космического аппарата g; при возрастании значения гравитационного ускорения космического аппарата g до величины, превышающей значение аэродинамического ускорения космического аппарата a, измеренное на этом же участке гравитационного разворота более чем в десять раз, осуществляют перевод космического аппарата на участок заключительного выведения космического аппарата на орбиту искусственного спутника планеты путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением:
где


 - функция, определяемая из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t;
- функция, определяемая из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t;
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
V - скорость движения космического аппарата;
θ - угол наклона вектора скорости к местному горизонту;
ε - угол между проекцией скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
m - масса космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
g - гравитационное ускорение, действующее на космический аппарат;
Р - тяга двигательной установки;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество;
γ - угол крена;
ω - угловая скорость вращения планеты;
rα зад - заданное расстояние между центром планеты и центром масс космического аппарата в апоцентре формируемой орбиты;
Vα зад _ заданная скорость космического аппарата в апоцентре формируемой орбиты,
по достижению заданных значений расстояния между центром планеты и центром масс космического аппарата и скорости космического аппарата в апоцентре формируемой орбиты осуществляют выключение тяги двигательной установки космического аппарата.
Технический результат изобретения заключается в повышении эффективности управления ракетодинамическими силами на активном участке выведения КА на орбиты искусственного спутника планет (обеспечение энергетической рациональности, точности, устойчивости), в том числе за счет использования безитерационных алгоритмов определения управляющих функций, основанных на применении принципа обратной связи между параметрами состояния и управления объектом.
Также указанный технический результат достигается за счет того, что в известном способе-прототипе, заключающемся в старте космического аппарата с поверхности планеты и его отделении от пусковой установки, в развороте космического аппарата по крену для обеспечения требуемого угла азимута, в определении текущих значений координат движения космического аппарата, а именно: скорости полета V, угла наклона вектора скорости к местному горизонту θ, расстояния между центром планеты и центром масс космического аппарата r, угла между проекцией вектора скорости на местный горизонт и местной параллелью ε, геоцентрической широты подспутниковой точки космического аппарата φ, массы космического аппарата m, плотности атмосферы на высоте полета космического аппарата ρ, аэродинамического ускорения а, кориолисовых и переносных ускорений космического аппарата, в осуществлении на участке вертикального полета космического аппарата его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с зависимостью:

где V - скорость движения космического аппарата;
Р - тяга двигательной установки;
m - масса космического аппарата;
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество космического аппарата;
ε - угол между проекцией вектора скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
γ - угол крена космического аппарата;
ω - угловая скорость вращения планеты,
при возрастании значения аэродинамического ускорения а до величины, превышающей суммарное значение кориолисовых и переносных ускорений космического аппарата более чем в десять раз, осуществляют его перевод на участок гравитационного разворота траектории движения космического аппарата путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением:
α=C1/q,
где q - скоростной напор, действующий на космический аппарат в процессе его движения в атмосфере;
С1 - константа, имеющая отрицательный знак, характеризующая конструктивные особенности выводимого на орбиту космического аппарата и определяемая крутизну траектории полета,
дополнительно на участке гравитационного разворота траектории движения космического аппарата определяют значения гравитационного ускорения космического аппарата g; при возрастании значения гравитационного ускорения космического аппарата g до величины, превышающей значение аэродинамического ускорения космического аппарата а, измеренное на этом же участке гравитационного разворота более чем в десять раз, осуществляют перевод космического аппарата на участок заключительного выведения космического аппарата на орбиту искусственного спутника планеты путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением:
где

 - функция, определяемая из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t;
- функция, определяемая из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t;
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
V - скорость движения космического аппарата;
θ - угол наклона вектора скорости к местному горизонту;
ε - угол между проекцией скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
m - масса космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
g - гравитационное ускорение, действующее на космический аппарат;
Р - тяга двигательной установки;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество;
γ - угол крена;
ω - угловая скорость вращения планеты;
rα зад - заданное расстояние между центром планеты и центром масс космического аппарата в апоцентре формируемой орбиты;
Vα зад _ заданная скорость космического аппарата в апоцентре формируемой орбиты,
по достижению заданных значений расстояния между центром планеты и центром масс космического аппарата и скорости космического аппарата в апоцентре формируемой орбиты осуществляют выключение тяги двигательной установки космического аппарата.
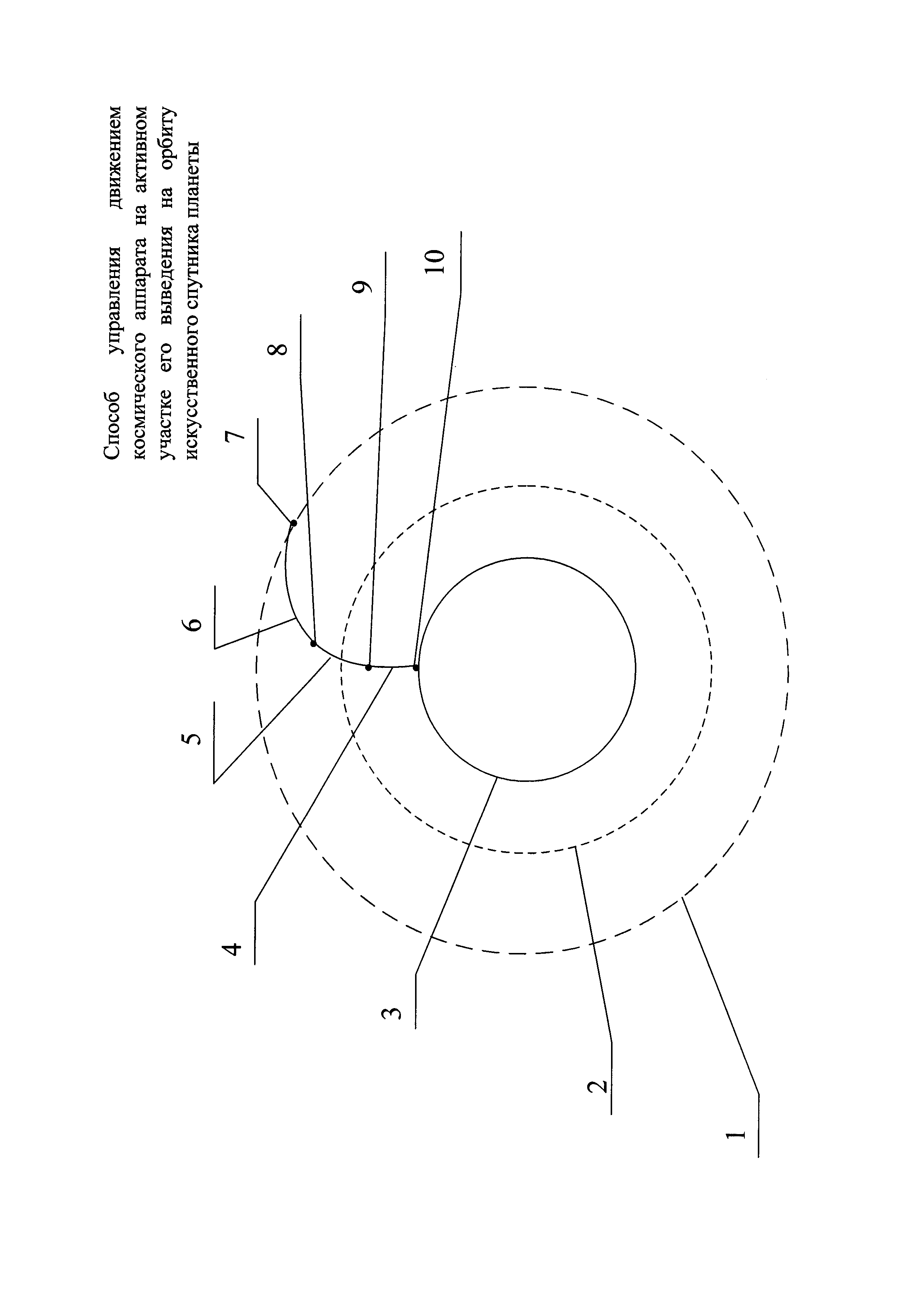
Заявляемый способ управления космическим аппаратом на активном участке его выведения на орбиту искусственного спутника планеты поясняется фигурой, на которой изображены этапы полета КА на активном участке его выведения на орбиту искусственного спутника планеты.
На фигуре и в тексте приняты следующие обозначения:
1 - формируемая орбита искусственного спутника планеты,
2 - условная граница атмосферы планеты,
3 - поверхность планеты,
4 - участок вертикального полета космического аппарата (от точки 10 до точки 9),
5 - участок гравитационного разворота траектории движения космического аппарата (от точки 9 до точки 8),
6 - участок заключительного выведения космического аппарата на орбиту искусственного спутника планеты от (точки 8 до точки 7),
7 - момент выключения тяги двигательной установки космического аппарата,
8 - момент перехода космического аппарата на режим формирования конечных параметров спутниковой орбиты,
9 - момент перехода космического аппарата на режим разворота по траекторному углу,
10 - точка старта космического аппарата.
Рассмотрим осуществление заявленного способа. Действия по управлению на участке вертикального полета космического аппарата (от точки 10 до точки 9) и на участке гравитационного разворота траектории движения космического аппарата (от точки 9 до точки 8), представленные на фигуре, подробно описаны выше при рассмотрении прототипа. Однако коротко повторим их.
На начальном участке движения достаточно продолжительное время осуществляется вертикальный полет, при этом изменение управляющего угла α определяется из рассмотрения дифференциального уравнения, характеризующего зависимость угла наклона вектора скорости к местному горизонту от времени:
где θ - угол наклона вектора скорости космического аппарата к местному горизонту.
Для реализации вертикального полета θ=90° угол α рассчитывается из условия равенства нулю функции dθ/dt=0 (при этом cos θ=cos 90°=0, sin θ=1):

На протяжении всего вертикального участка полета угол α не превышает ~0,1°, следовательно, осуществляется разгон КА с практически максимальной интенсивностью: при выработке определенного количества топлива скорость КА для такого способа управления будет больше, чем для способов-аналогов.
После того как скорость КА возрастает до некоторой величины (порядка нескольких сотен м/с), влияние кориолисовых и переносных ускорений на динамику полета будет значительно снижено, т.е. необходимость их учета при определении программного управления α отпадает. В этот момент КА, достигший значительной кинетической энергии, целесообразно отклонить от вертикали путем реализации программы: α=C1/q. Выбором константы С1 из диапазона С1<C1max обеспечивается требуемая крутизна траектории активного участка полета, зависящая от параметров формируемой орбиты, а также дальности падения отработанных частей первой ступени (при использовании многоступенчатых КА).
Устойчивость движения КА обуславливается наличием обратной связи текущего вектора состояния и управляющего воздействия. Эта связь учитывает все силы, оказывающие влияние на траекторию движения КА.
Рассмотрим управление КА на участке заключительного выведения космического аппарата на орбиту искусственного спутника планеты от (точки 8 до точки 7).
После снижения аэродинамической силы а, действующей на КА, до величины меньшего порядка, чем гравитационная g, реализуется заключительный этап выведения аппарата на орбиту, где управление вектором тяги ДУ осуществляется из условий минимизации потребных энергозатрат и обеспечения высокой точности формирования орбиты. Решение первой задачи обеспечивается путем управления КА углом атаки с минимально возможными абсолютными значениями, при которых может быть осуществлено выведение аппарата на заданную орбиту. Решение второй задачи достигается за счет адаптивного алгоритма, вырабатывающего управляющее воздействие в зависимости от текущего и конечного положения КА.
Программа управления на заключительном этапе обеспечивает энергетически рациональный перевод КА от момента завершения этапа гравитационного разворота до момента выведения аппарата на орбиту с заданными радиус-векторами апогея и перигея rα зад и rπ зад.
Дадим обоснование программы управления углом α, при котором обеспечивается выполнение указанных требований к заключительному этапу формирования спутниковых орбит. С использованием указанного условия о доминирующем воздействии ракетодинамических сил и о малости угла наклона вектора скорости КА к местному горизонту θ на заключительном этапе полета преобразуем дифференциальные уравнения для расчета скорости и высоты полета КА:
Поделив первое уравнение на второе, запишем:
Интегрируя его в пределах по скорости от V до Vα зад и по радиус вектору от r до rα зад, получим зависимость для расчета значения угла  , обеспечивающего перевод КА на заданную орбиту:
, обеспечивающего перевод КА на заданную орбиту:
С учетом полученной зависимости общая структура управления углом α имеет вид:

Используемая в этом уравнении функция  определяется из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t:
определяется из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t:
Решая это уравнение относительно угла α, запишем окончательную зависимость для пошагового определения угла между вектором тяги двигательной установки и вектором скорости космического аппарата:
где
α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;
V - скорость движения космического аппарата;
θ - угол наклона вектора скорости к местному горизонту;
ε - угол между проекцией скорости на местный горизонт и местной параллелью;
r - расстояние между центром планеты и центром масс космического аппарата;
φ - геоцентрическая широта подспутниковой точки космического аппарата;
m - масса космического аппарата;
ρ - плотность атмосферы на высоте полета космического аппарата;
g - гравитационное ускорение, действующее на космический аппарат;
Р - тяга двигательной установки;
Рх - приведенная нагрузка на лобовую поверхность космического аппарата;
Кб - балансировочное аэродинамическое качество;
γ - угол крена;
ω - угловая скорость вращения планеты;
rα зад - заданное расстояние между центром планеты и центром масс космического аппарата в апоцентре формируемой орбиты;
Vα зад - заданная скорость космического аппарата в апоцентре формируемой орбиты.
С помощью приведенных уравнений пошагово рассчитывается управляющий угол α в зависимости от координат текущего и конечного положений КА. Тем самым обеспечивается высокая точность формирования орбиты с заданными параметрами.
Суть такой структуры управления углом α заключается в следующем. При рассмотрении условного режима полета с учетом только первого слагаемого последнего уравнения космический аппарат осуществляет полет с постоянным значением траекторного угла θ. При этом угол α будет принимать значения, близкие к нулю. С учетом второго слагаемого обеспечивается монотонное снижение угла θ до нуля. Причем с помощью определения параметра  обеспечивается необходимая крутизна траектории выведения и формируется промежуточная орбита с заданными параметрами Vα зад и rα зад. Нетрудно видеть, что в случае достижения заданного радиус-вектора апогея rα зад, что соответствует условию θ=0, второе слагаемое обращается в ноль, и продолжающийся режим полета с работающей двигательной установкой обеспечивает увеличение скорости КА до заданного значения Vα зад на постоянной высоте полета и при нулевом значении угла наклона вектора скорости к местному горизонту.
обеспечивается необходимая крутизна траектории выведения и формируется промежуточная орбита с заданными параметрами Vα зад и rα зад. Нетрудно видеть, что в случае достижения заданного радиус-вектора апогея rα зад, что соответствует условию θ=0, второе слагаемое обращается в ноль, и продолжающийся режим полета с работающей двигательной установкой обеспечивает увеличение скорости КА до заданного значения Vα зад на постоянной высоте полета и при нулевом значении угла наклона вектора скорости к местному горизонту.
Таким образом, определяя значения , можно обеспечить достижение всей совокупности требуемых конечных значений скорости, угла наклона вектора скорости к местному горизонту и радиус-вектора полета КА.
Реализация такого способа управления дает ряд преимуществ по сравнению со способом-прототипом. Во-первых, обеспечивается снижение энергетических затрат на формирование заданных орбит ~ на 10-15% за счет использования энергетически рациональных программ управления углом между вектором тяги двигательной установки и вектором скорости. Во-вторых, повышается устойчивость движения аппарата на всех этапах полета за счет наличия обратной связи между координатами текущего состояния КА и управляющих воздействий. В-третьих, повышается точность формирования спутниковых орбит за счет использования быстродействующих зависимостей для расчета и периодических коррекций управляющего угла α. В основу алгоритма управления КА положена направленность на поэтапное осуществление его управление из текущего положения в конечное за счет выбора величины управляющего угла α, лежащего в окрестности нулевого значения. Кроме того, использование принципа обратной связи между параметрами текущего состояния КА и управляющими функциями дает возможность обеспечения высокого уровня устойчивости движения аппарата, оперативности принятия решений и точности формирования спутниковых орбит. Все это в совокупности позволяет существенно повысить эффективность выполнения космических миссий ближнего и дальнего космоса.
Покажем возможность практического применения изобретения.
В условиях планируемого расширения состава орбитальных группировок околоземных КА, а также учитывая повышение активности исследования дальнего космоса, проблема выведения КА на орбиты искусственного спутника Земли и планет является одной из определяющих для решения целого ряда практических и научно-исследовательских задач изучения космоса. От успешного решения проблемы эффективного и энергетически рационального формирования спутниковых орбит во многом зависит выполнение целевых научных программ космических миссий, что и обуславливает актуальность и практическую значимость решения данной проблемы.
Что касается технических средств и методов, обеспечивающих управление движением КА при выведении на спутниковые орбиты, то они известны - см, например, упомянутую работу Сихарулидзе Ю.Г. - [1], а также Сихарулидзе Ю.Г. «Баллистика и наведение летательных аппаратов», М., Издательство БИНОМ, 2013 - [3], Дмитриевский А.А., Иванов Н.М., Лысенко Л.Н., Богодистов С.С. «Баллистика и наведение ракет», М.: Машиностроение, 1985 - [4].
Способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты, заключающийся в старте космического аппарата с поверхности планеты и его отделении от пусковой установки, в развороте космического аппарата по крену для обеспечения требуемого угла азимута, в определении текущих значений координат движения космического аппарата, а именно: скорости полета V, угла наклона вектора скорости к местному горизонту θ, расстояния между центром планеты и центром масс космического аппарата r, угла между проекцией вектора скорости на местный горизонт и местной параллелью ε, геоцентрической широты подспутниковой точки космического аппарата φ, массы космического аппарата m, плотности атмосферы на высоте полета космического аппарата ρ, аэродинамического ускорения а, кориолисовых и переносных ускорений космического аппарата, в осуществлении на участке вертикального полета космического аппарата его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с зависимостью: где V - скорость движения космического аппарата;Р - тяга двигательной установки;m - масса космического аппарата;α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;ρ - плотность атмосферы на высоте полета космического аппарата;Р - приведенная нагрузка на лобовую поверхность космического аппарата;К - балансировочное аэродинамическое качество космического аппарата;ε - угол между проекцией вектора скорости на местный горизонт и местной параллелью;r - расстояние между центром планеты и центром масс космического аппарата;φ - геоцентрическая широта подспутниковой точки космического аппарата;γ - угол крена космического аппарата;ω - угловая скорость вращения планеты,при возрастании значения аэродинамического ускорения а до величины, превышающей суммарное значение кориолисовых и переносных ускорений космического аппарата более чем в десять раз, осуществляют его перевод на участок гравитационного разворота траектории движения космического аппарата путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением:α=C/q,где q - скоростной напор, действующий на космический аппарат в процессе его движения в атмосфере;С - константа, имеющая отрицательный знак, характеризующая конструктивные особенности выводимого на орбиту космического аппарата и определяющая крутизну траектории полета,отличающийся тем, что на участке гравитационного разворота траектории движения космического аппарата определяют значения гравитационного ускорения космического аппарата g, при возрастании значения гравитационного ускорения космического аппарата g до величины, превышающей значение аэродинамического ускорения космического аппарата а, измеренное на этом же участке гравитационного разворота более чем в десять раз, осуществляют перевод космического аппарата на участок заключительного выведения космического аппарата на орбиту искусственного спутника планеты путем его движения с углом между вектором тяги двигательной установки и вектором скорости космического аппарата α, изменяемым в соответствии с выражением: где - функция, определяемая из условия равенства нулю производной от угла наклона вектора скорости к местному горизонту θ по времени t;α - угол между вектором тяги двигательной установки и вектором скорости космического аппарата;V - скорость движения космического аппарата;θ - угол наклона вектора скорости к местному горизонту;ε - угол между проекцией скорости на местный горизонт и местной параллелью;r - расстояние между центром планеты и центром масс космического аппарата;φ - геоцентрическая широта подспутниковой точки космического аппарата;m - масса космического аппарата;ρ - плотность атмосферы на высоте полета космического аппарата; g - гравитационное ускорение, действующее на космический аппарат;Р - тяга двигательной установки;Р - приведенная нагрузка на лобовую поверхность космического аппарата;К - балансировочное аэродинамическое качество;γ - угол крена;ω - угловая скорость вращения планеты;r - заданное расстояние между центром планеты и центром масс космического аппарата в апоцентре формируемой орбиты;V заданная скорость космического аппарата в апоцентре формируемой орбиты,по достижению заданных значений расстояния между центром планеты и центром масс космического аппарата и скорости космического аппарата в апоцентре формируемой орбиты осуществляют выключение тяги двигательной установки космического аппарата.



Способ измерения угла поворота вала привода и устройство для его реализации
Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы
Способ повышения надёжности изделий
Способ получения углеродных нанотрубок в сверхзвуковом потоке и устройство для его осуществления
Способ измерения угла поворота вала привода и устройство для его реализации
Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы
Способ повышения надёжности изделий
Способ получения углеродных нанотрубок в сверхзвуковом потоке и устройство для его осуществления

