Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ, УГЛОВЫХ СКОРОСТЕЙ И УСКОРЕНИЙ НА БОРТУ КОСМИЧЕСКОГО АППАРАТА В УСЛОВИЯХ, БЛИЗКИХ К НЕВЕСОМОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области измерений параметров движения твердых тел и предназначено для использования в космической технике на борту космического аппарата (КА) в условиях, близких к невесомости, для определения малых линейных ускорений (микроускорений), а также угловых скоростей и ускорений при космических полетах.
Известно измерение ускорений с помощью устройства по патенту DE 10147865, в котором описан датчик ускорений с инерционной массой в виде шарика, который может применяться для измерения ускорений на борту космического аппарата (КА) при космическом полете. В этом устройстве инерционная масса в виде шарика черного цвета вывешена в центре кубической кюветы посредством пружин с одинаковыми размерами и коэффициентами жесткости. Три пары пружин расположены вдоль каждой из трех координатных осей. В кубическую кювету, вдоль каждой из координатных осей, встроены также пары «излучатель - фотоэлемент». При воздействии ускорений шарик сдвигается, изменяется освещенность фотоэлементов, сопротивление их изменяется и может быть измерено. На основе изменения сопротивлений фотоэлементов может оцениваться ускорение объекта, на котором установлен датчик, причем во всех трех направлениях одновременно. Недостатком этого датчика ускорений является то, что измеряются параметры ускорения не в чистом виде, а на основе изменения освещенности фотоэлементов и изменения их сопротивления в зависимости от ускорения. Поэтому эти данные не могут считаться достаточно точными, годными для проверки математических моделей, связанных с оценкой ускорений другими известными устройствами и способами. Кроме того, могут появиться неточности за счет неидентичности параметров излучателей, фотоэлементов и пружин.
Наиболее близкими аналогами заявляемым являются способ и устройство измерения скорости по обработке пространственных изображений в соответствии с патентом US 6603535, принятым за прототип. Согласно этому патенту измерение трехмерных параметров движения, а именно, сначала координат положения, а затем скоростей мелких объектов в виде индикаторных частиц, осуществляется с помощью устройства, содержащего кювету с прозрачной жидкостной средой, в которой перемещается большое количество мелких объектов в виде взвешенных частиц, по крайней мере две видеокамеры для наблюдения за объектами в жидкости, установленные приблизительно перпендикулярно друг другу, выходы которых соединены по крайней мере с одним компьютером. Способ включает синхронную регистрацию видеокамерами множества кадров изображений жидкости с помещенными в нее мелкими объектами, слежение за этими объектами на экране монитора компьютера, измерение координат положения объектов на кадрах двухмерных изображений, регистрируемых каждой из видеокамер, и вычисление трехмерных скоростей объектов по измеренным трем координатам, изменяющимся от кадра к кадру, и времени между кадрами.
Недостатком этого способа является то, что отслеживается движение нескольких мелких объектов в жидкостной среде и определяются параметры их движения (координаты и скорость) во многих точках в жидкости и при этом возникают трудности слежения за выбранными мелкими объектами среди их множества в жидкостной среде одновременно двумя видеокамерами, а для их идентификации на кадрах двух видеокамер приходится применять сложные методы фильтрации изображений для удаления лишних мелких объектов, выбросов и пиков. По этому способу можно вычислить и трехмерные ускорения отслеживаемых мелких объектов как вторые производные по времени от предварительно найденных значений трехмерных координат положения.
В заявляемом способе измерения ускорений, в условиях, близких к невесомости, осуществляется наблюдение и видеорегистрация отклонений движений от прямолинейных и равномерных трех объектов (инерционных масс в виде шариков). При этом три объекта (шарика) находятся в свободном полете в воздушной среде в ограниченном объеме (прозрачной кювете в виде куба) без контакта со стенками. Наблюдение и видеорегистрация осуществляются синхронно двумя видеокамерами в двух взаимно перпендикулярных направлениях через две смежные прозрачные грани кубической кюветы. В результате получают одновременно виды трех объектов на фоне каждой из двух подсвеченных ортогональных плоскостей в виде трех движущихся темных кругов. По изменению координат центров этих кругов при перемещении по подсвеченным смежным граням кубической кюветы определяются значения векторов их двухмерного движения, а затем и трехмерные параметры движения каждого из шариков, т.е. векторы перемещения за время между соседними кадрами, а также векторы скорости как первые производные по времени от этих векторов, используя два последовательных кадра, и векторы ускорений, как вторые производные, используя три последовательных кадра. Векторы линейных ускорений относительно кюветы должны быть одинаковыми для всех трех шариков при условии, что кювета не вращается в инерциальном пространстве. Наличие трех наблюдаемых шариков позволяет определить угловые скорости и ускорения вращения вокруг осей, коллинеарных координатным осям кубической кюветы, и практически исключить ошибки определения параметров движения при наличии вращения космического аппарата. Устройство для осуществления способа имеет корпус в виде прямоугольного параллелепипеда, в котором размещены входящие в состав устройства части, т.е. прозрачная кубическая кювета с помещенными в нее тремя шариками для наблюдения, система освещения, состоящая из источника электропитания и светобумаги; система видеорегистрации, с относящимися к ней видеокамерами и зеркалами и система инициирования свободного движения шариков в воздушной среде кюветы, содержащая электродвигатель и исполнительный механизм. Предложенные способ и устройство решают проблему точного измерения микроускорений в чистом виде путем наблюдения и регистрации реакций объектов, взвешенных в прозрачной среде, на изменения микрогравитационной обстановки. При этом обеспечивается надежность и широкий диапазон измерений. Кроме того, заявляемое устройство позволяет измерять параметры углового движения - угловую скорость и ускорение, а также может применяться в качестве эталонного низкочастотного акселерометра для поверки и калибровки акселерометров других типов в условиях космического полета.
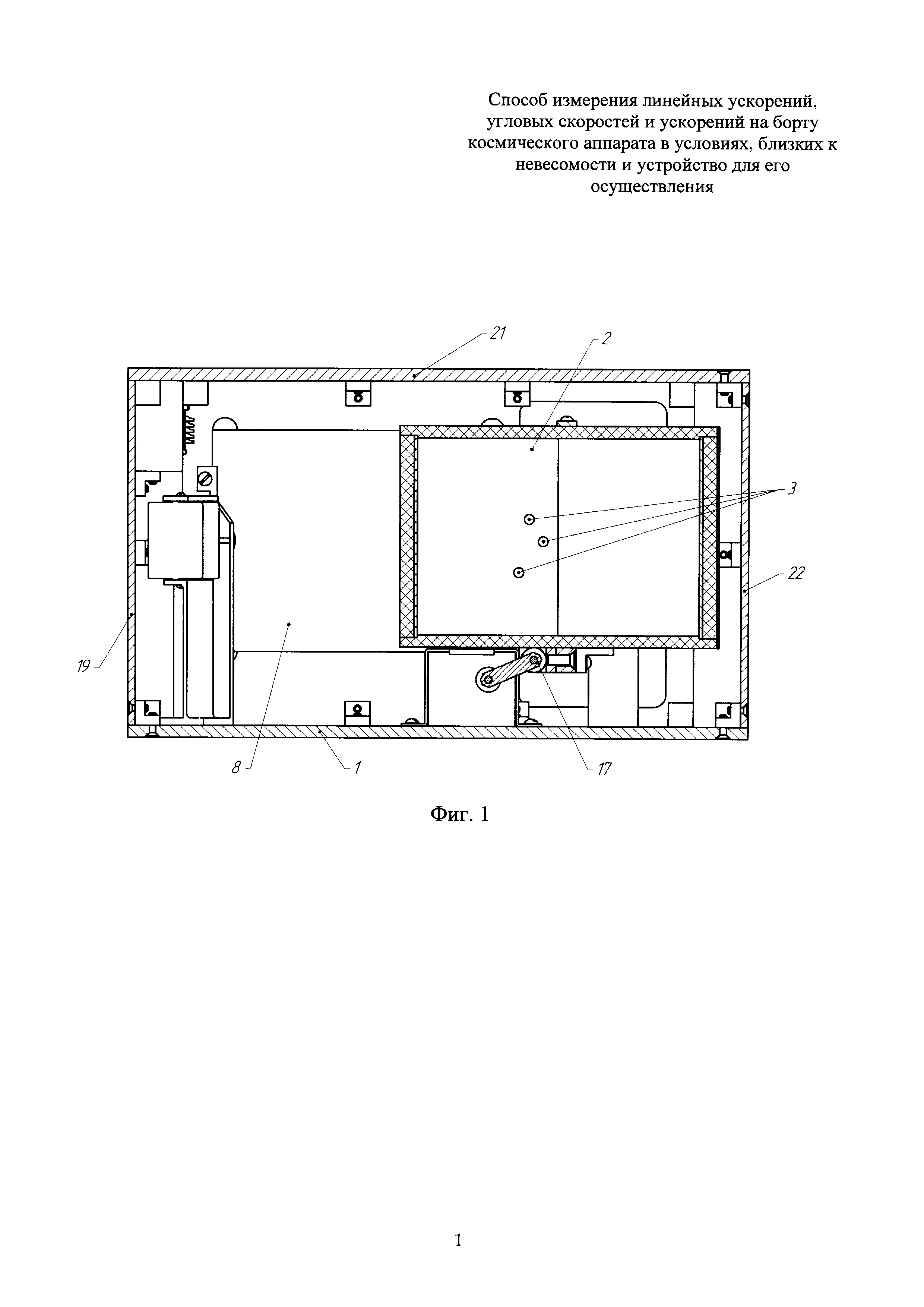
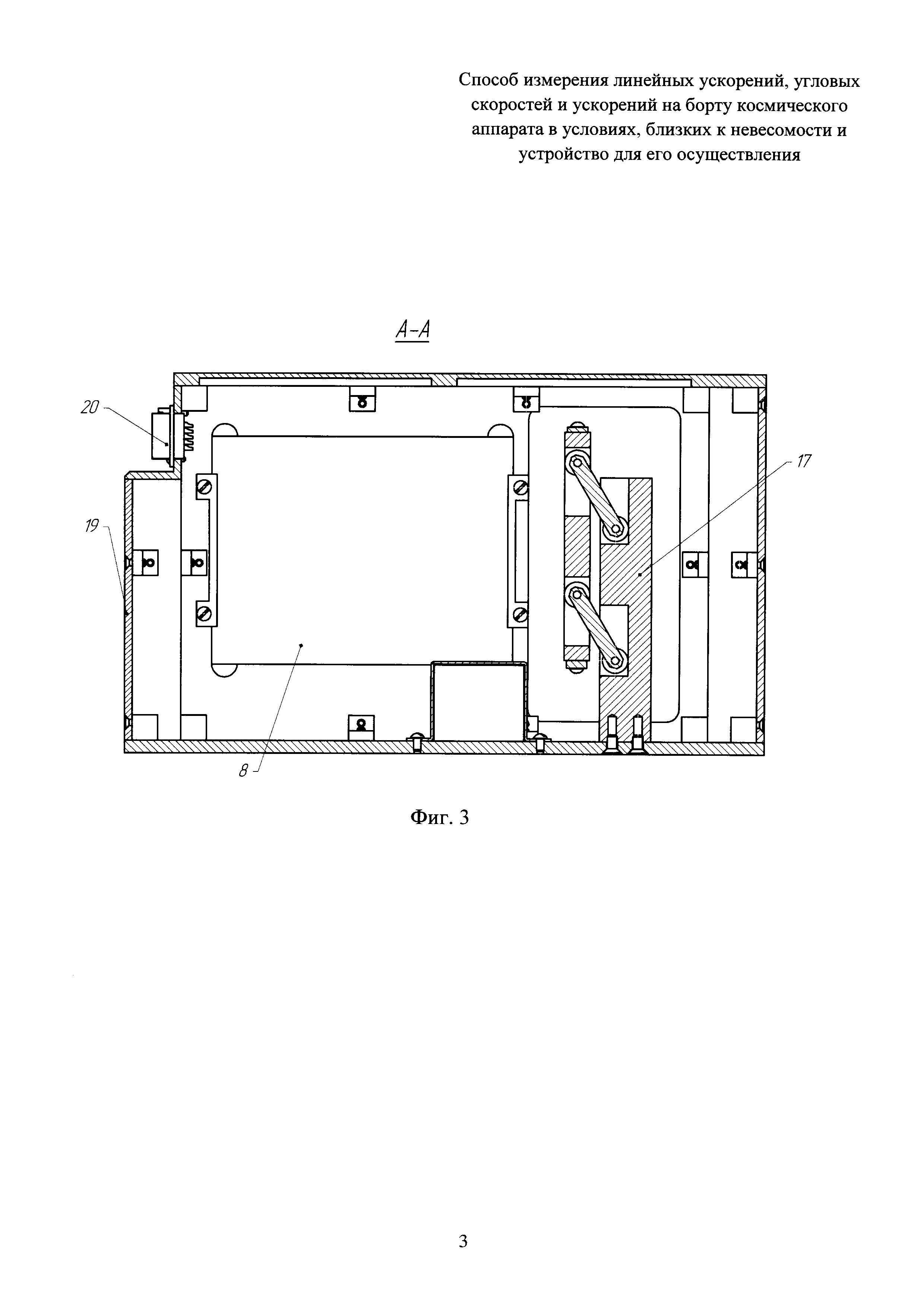
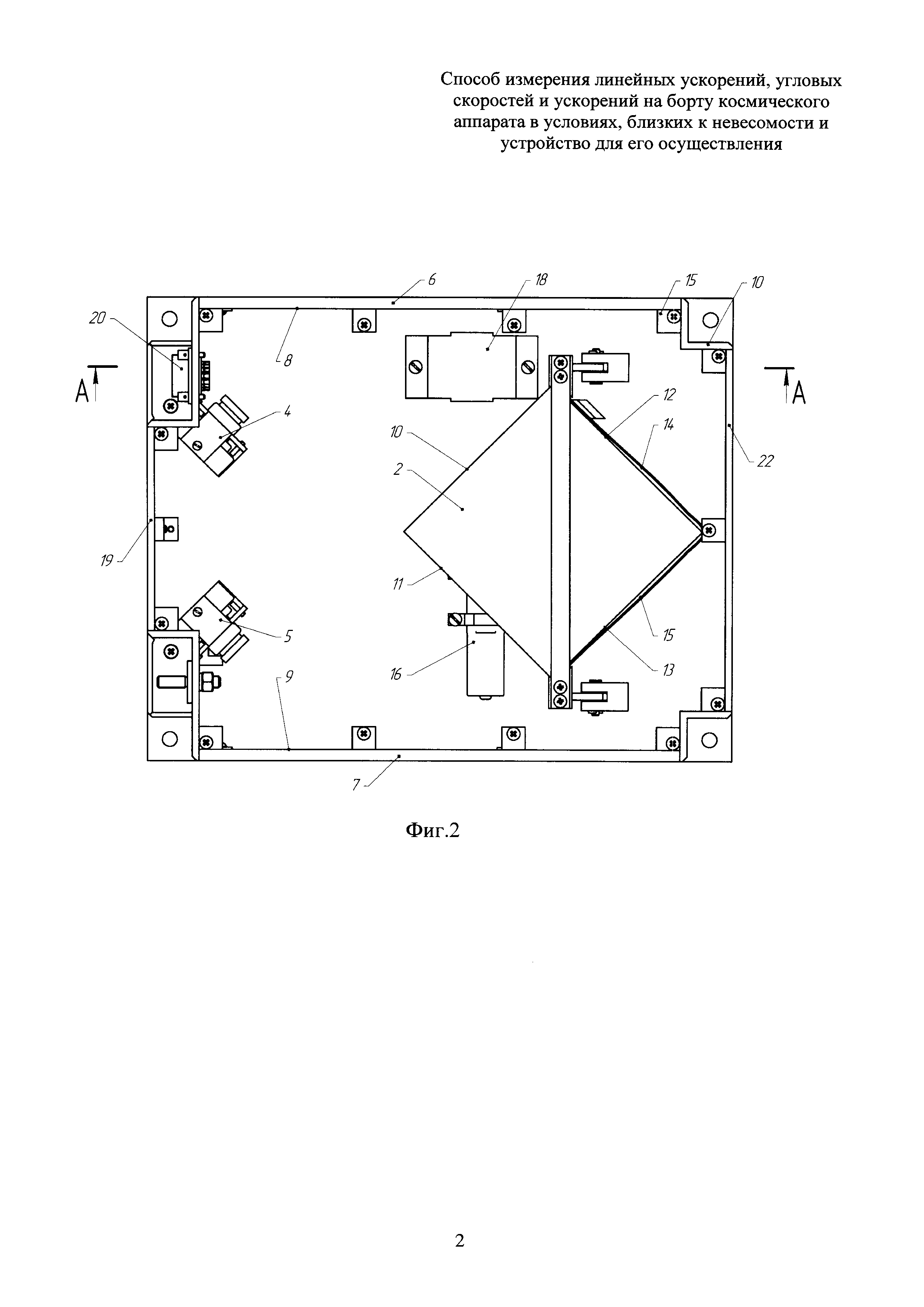
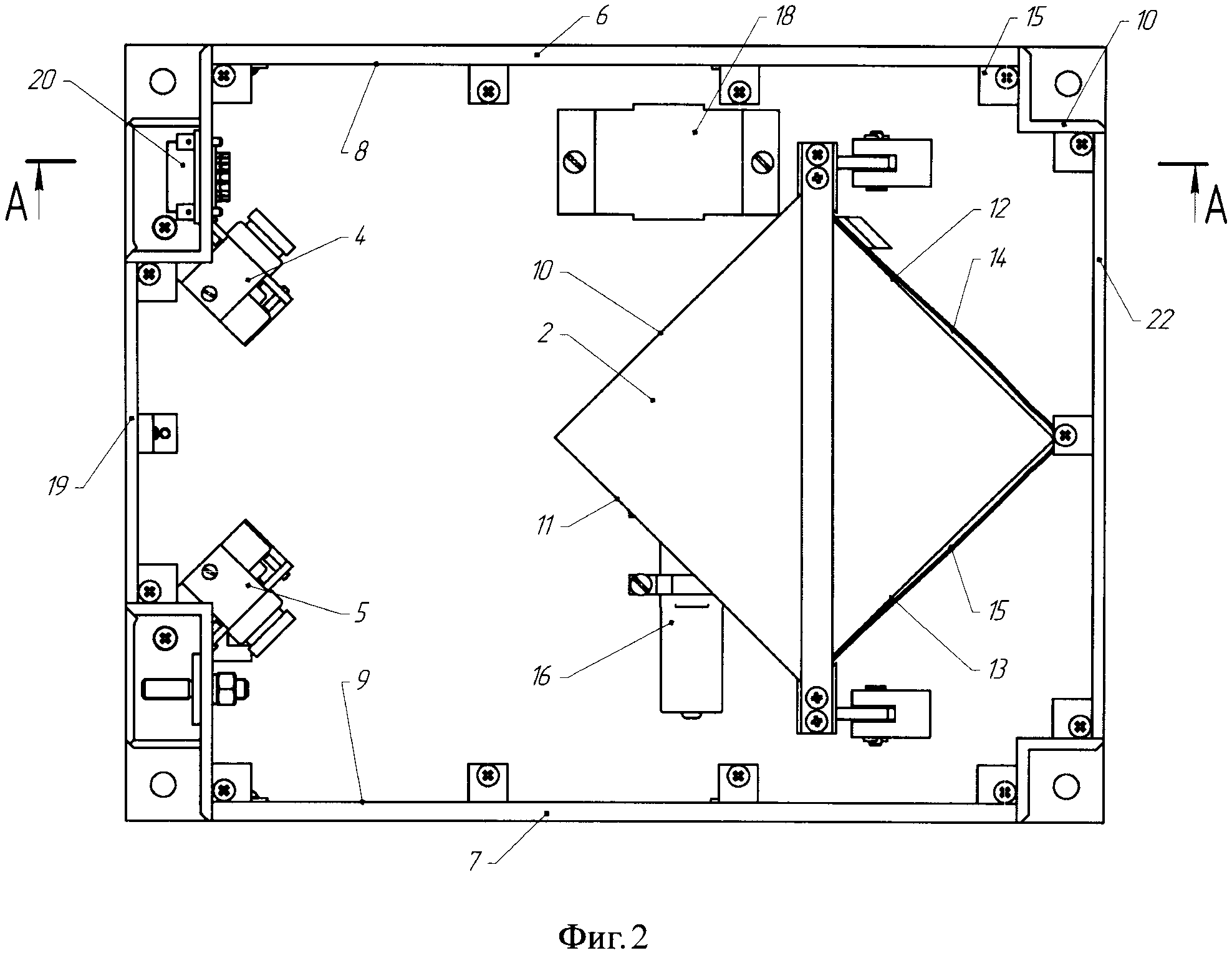
Сущность предложенного устройства поясняется фиг. 1, 2 и 3. На фиг. 1 изображен общий вид устройства в разрезе, на фиг. 2 - вид сверху (крышка 21 снята), на фиг. 3 - разрез А-А.
На основании 1 корпуса устройства размещены кубическая кювета 2 с тремя инерционными массами в виде шариков 3 в воздушной среде и две видеокамеры 4 и 5 системы видеорегистрации под прямым углом друг к другу. Видеокамера 4 направлена под углом 45° на боковую стенку 6 корпуса, а видеокамера 5 под углом 45° смотрит в сторону боковой стенки 7. На внутренних сторонах боковых стенок 6 и 7 корпуса установлено, соответственно, по зеркалу 8 и 9 системы видеорегистрации, под углами 45° к которым находятся, соответственно, две прозрачные грани 10 и 11 кубической кюветы 2. К противоположным смежным граням 12 и 13 (на которые могут быть нанесены масштабные сетки) кубической кюветы 2 плотно прижаты листы светобумаги 14 и 15 соответственно. На основании 1 корпуса установлены также электродвигатель 16 и механизм 17, соединенный с кубической кюветой 2, для инициирования свободного движения трех шариков 3 в условиях, близких к невесомости, при полете космического аппарата, и источник электропитания 18 для листов светобумаги 14 и 15. На задней стенке 19 корпуса имеется разъем 20, через который подается питание к электродвигателю 16 и осуществляется вывод информации с видеокамер 4 и 5 для регистрации и наблюдения на мониторе компьютера. 21 - съемная крышка корпуса устройства, 22 - передняя стенка.
Использование зеркал 8 и 9 на боковых стенках 6 и 7 корпуса позволяет уменьшить габариты устройства при использовании видеокамер 4 и 5 с большим фокусным расстоянием. Система инициирования свободного движения шариков 3 в воздушной среде кюветы 2, состоящая из электродвигателя и исполнительного механизма, необходима в случаях остановок шариков около стенок кюветы 2. Инициирование свободного полета шариков 3 осуществляется посредством механического воздействия на кювету 2, путем встряхивания ее через определенные промежутки времени. Встряхивание осуществляется в направлении главной диагонали кюветы, что гарантирует отталкивание шариков от любой из стенок кюветы. При реализации способа определения ускорений в условиях, близких к невесомости, устройство работает следующим образом. С помощью электродвигателя 16 и механизма 17 инициируется движение по крайней мере трех шариков 3 (которые могут быть разного диаметра) в воздушной среде прозрачной кюветы 2 в виде куба. Видеокамеры 4 и 5 смотрят на отраженные соответствующими зеркалами 8 и 9 движения шариков 3, осуществляют одновременную съемку и в результате получают через прозрачные грани 10 и 11 виды трех объектов, на фоне каждой из двух подсвеченных ортогональных плоскостей в виде трех перемещающихся темных кругов.
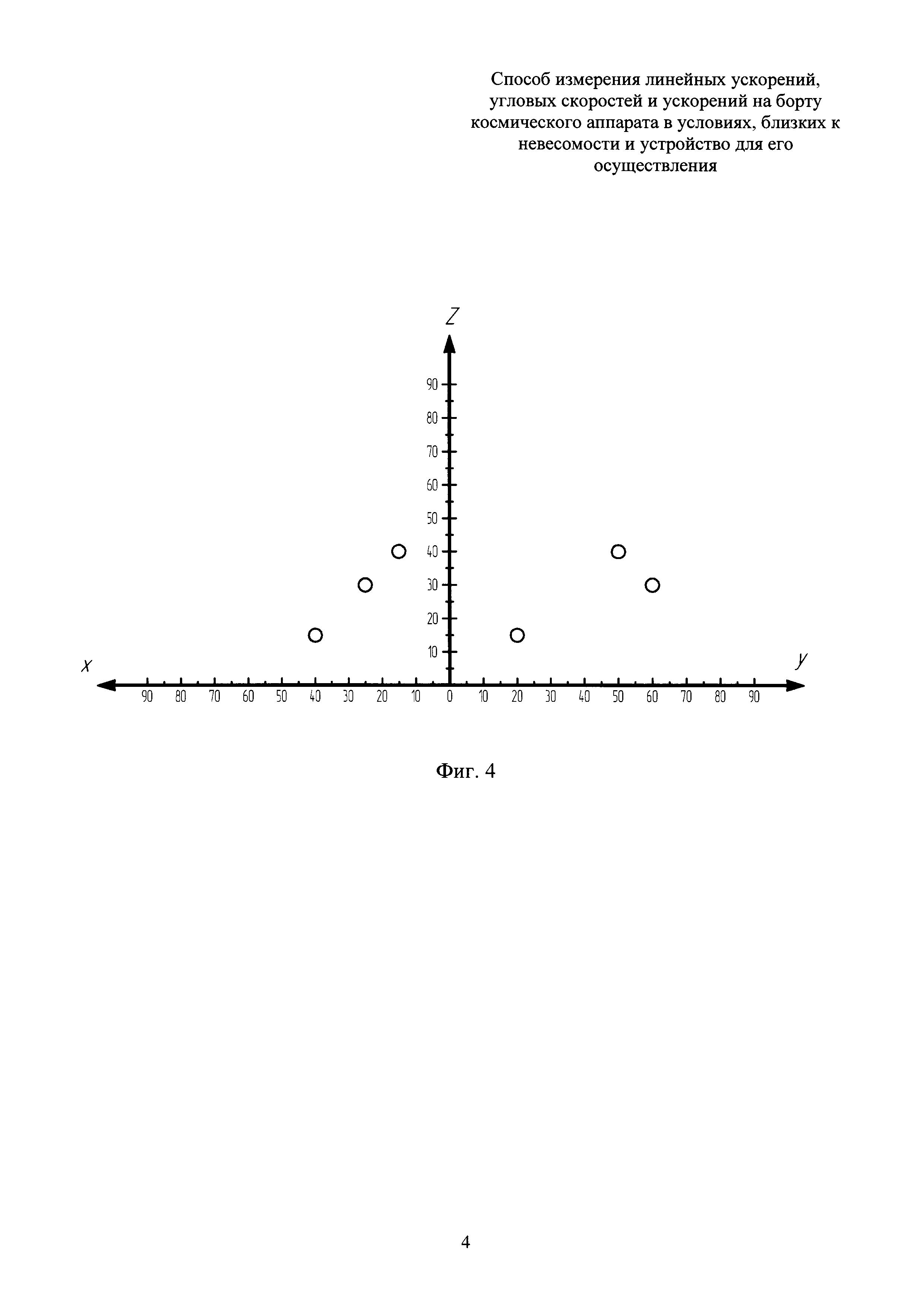
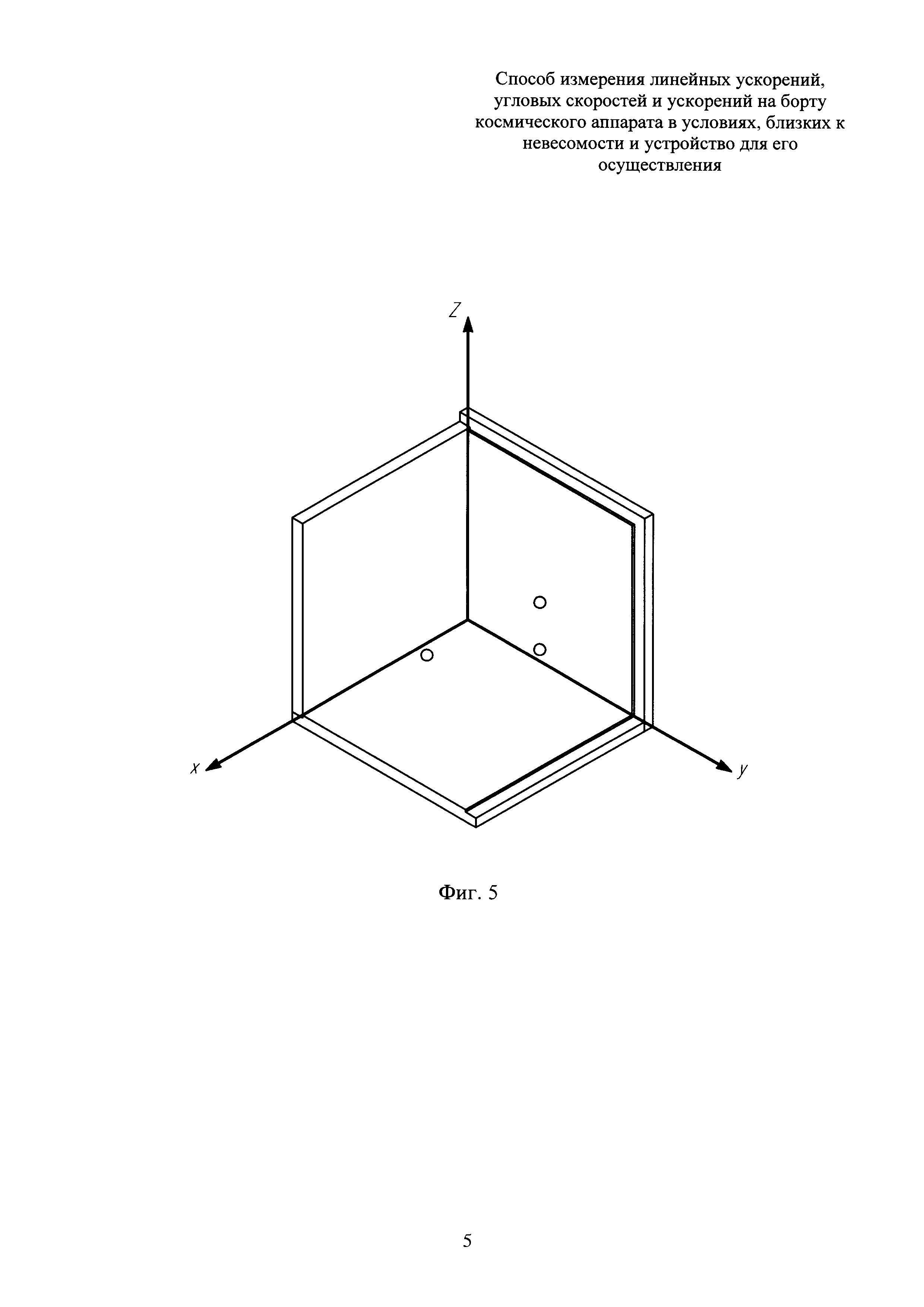
Пример кадров изображений трех шариков на фоне подсвеченных граней кюветы приведен на фиг. 4, фиг. 5 иллюстрирует положение трех шариков внутри кубической кюветы в момент съемки видеокамерами кадров, показанных на фиг. 4.
Выходы обеих видеокамер через разъем 20 соединены с видеорегистратором (для послеполетного анализа) и могут быть параллельно соединены с компьютером, для наблюдения за шариками в режиме реального времени, и запрограммированным для вычисления параметров движения.
Последовательность операций при проведении измерений следующая:
1. На борту космического аппарата, в условиях, близких к невесомости, инициируют движение трех шариков 3 в воздушной среде в прозрачной кубической кювете 2.
2. Включают видеокамеры 4 и 5 и осуществляют синхронную съемку трех движущихся шариков 3 в кубической кювете 2 на фоне подсвеченных листами светобумаги 14 и 15 смежных граней 13 и14 (момент времени t=0).
3. С помощью измерения координат каждого из трех шариков 
 - номер шарика, верхний индекс Т - знак транспонирования), находят значения векторов положения шариков в системе координат, связанной с кюветой:
- номер шарика, верхний индекс Т - знак транспонирования), находят значения векторов положения шариков в системе координат, связанной с кюветой:

4. Вычисляют векторы скоростей каждого из k-го шарика в системе координат, связанной с кюветой 

где Δt - временной интервал, с которым производится снятие информации.
5. Вычисляют векторы ускорений каждого из i-го шарика в системе координат, связанной с кюветой 

6. Используют известную из теоретической механики теорему Кориолиса (см., например, Макеев А.П. Теоретическая механика, гл. 1. § 5. Ижевская республиканская типография. 1999 г.) о том, что абсолютное ускорение равно сумме переносного, относительного и кориолисова ускорений. В нашем случае для k-ого шарика абсолютное ускорение считается равным нулю, переносное ускорение равно  относительное
относительное  кориолисово
кориолисово  т.е.
т.е.  где
где
 - микроускорение точки (0, 0, 0) системы координат, связанной с кюветой;
- микроускорение точки (0, 0, 0) системы координат, связанной с кюветой;
 - угловая скорость КА (кюветы);
- угловая скорость КА (кюветы);
 - угловое ускорение КА (кюветы).
- угловое ускорение КА (кюветы).
Тогда выражение для  имеет вид:
имеет вид:

Далее, если аргумент (t) не несет смысловой нагрузки для однозначной интерпретации формул, он будет опускаться.
Пользуясь соотношением, которое можно непосредственно проверить:

где  - произвольные 3-х мерные векторы,
- произвольные 3-х мерные векторы,
 - кососимметрическая матрица, сопутствующая вектору
- кососимметрическая матрица, сопутствующая вектору 
Так как  то
то

Используя уравнения (2) и (5), получают уравнение (1) в виде:

Второе слагаемое в (4) дает квадратичные и перекрестные члены компонентов вектора  . Для линеаризации уравнения (4) по
. Для линеаризации уравнения (4) по  в каждый момент времени t, пользуются соотношением:
в каждый момент времени t, пользуются соотношением:

здесь  - оценка вектора
- оценка вектора  с точностью до 0(Δt).
с точностью до 0(Δt).
Для того чтобы воспользоваться ур. (5) на первом шаге (t-Δt=0), можно считать, что начальное значение 
Тогда уравнение (4), учитывая уравнение (5), получается в виде:

Используя соотношение, которое проверяется непосредственно:

Где Е3×3 - единичная матрица размером 3×3.
Переписывают (6) в виде матричного уравнения:

7. Из уравнения (8) п. 6 при условии,
что  ,
,
вычисляют обратную матрицу  , затем находят векторы микроускорения
, затем находят векторы микроускорения  , угловой скорости и углового ускорения
, угловой скорости и углового ускорения  по измеренным и оцененным величинам
по измеренным и оцененным величинам  - номер шарика):
- номер шарика):

Для моментов времени, когда  и обратной матрицы в уравнения (9) не существует, векторы
и обратной матрицы в уравнения (9) не существует, векторы  восстанавливают по предыдущим и последующим для данных моментов значениям этих векторов, считая, что они изменялись линейно по времени. Следует отметить, что случай, когда детерминант матрицы в уравнении (8) равен нулю, очень редок, т.к. для этого необходимо, по крайней мере, чтобы все векторы положения и векторы скоростей каждого шарика были соответственно коллинеарными.
восстанавливают по предыдущим и последующим для данных моментов значениям этих векторов, считая, что они изменялись линейно по времени. Следует отметить, что случай, когда детерминант матрицы в уравнении (8) равен нулю, очень редок, т.к. для этого необходимо, по крайней мере, чтобы все векторы положения и векторы скоростей каждого шарика были соответственно коллинеарными.
Способ повышения надежности изделий (варианты)
Способ сохранения герметичности космического аппарата при столкновении с высокоскоростными телами и устройство для его реализации (варианты)
Способ размещения космического аппарата на геостационарной орбите и устройство для его реализации
Способ повышения отказоустойчивости изделий (варианты)
Способ изменения траектории движения опасного космического тела (варианты)
Способ управления спуском космического аппарата в атмосфере планет
Способ подготовки внутренней поверхности корпуса ракетного двигателя перед заливкой смесевого топлива
Способ динамического контроля тупиковых ситуаций инфокоммуникационной системы и устройство для его осуществления
Способ обеспечения управления полетами космических аппаратов
Способ контроля тупиковых ситуаций инфокоммуникационной системы и устройство для его осуществления
Способ повышения надежности изделий (варианты)
Способ сохранения герметичности космического аппарата при столкновении с высокоскоростными телами и устройство для его реализации (варианты)
Способ размещения космического аппарата на геостационарной орбите и устройство для его реализации
Способ повышения отказоустойчивости изделий (варианты)
Способ изменения траектории движения опасного космического тела (варианты)
Способ управления спуском космического аппарата в атмосфере планет
Способ подготовки внутренней поверхности корпуса ракетного двигателя перед заливкой смесевого топлива
Способ динамического контроля тупиковых ситуаций инфокоммуникационной системы и устройство для его осуществления
Способ обеспечения управления полетами космических аппаратов
Способ контроля тупиковых ситуаций инфокоммуникационной системы и устройство для его осуществления

