Результат интеллектуальной деятельности: МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ
Вид РИД
Изобретение
Изобретение относится к авиастроению, а именно к конструкциям шасси самолета.
Известна носовая опора шасси, на неподвижной относительно вертикальной оси части стойки которой установлен электропривод поворота штока с поперечной осью и колесами (патенты GB №2511856 от 15.03.2013, US №8752790 от 29.04.2009, US №8177160 от 31.03.2009, RU №2485015 от 06.04.2010). На выходном валу электродвигателя имеется шестерня, взаимодействующая с зубчатым колесом, закрепленным на штоке амортизатора (GB №2511856) непосредственно или через управляемую муфту (RU №2485015, US №8177160). Зубчатое колесо может быть входным звеном волнового или планетарного (US №8177160) редуктора (US №8752790).
Известные электроприводы поворота носовой опоры шасси имеют ряд существенных недостатков: при одноступенчатых зубчатых передачах электродвигатель должен иметь низкую частоту вращения ротора и, следовательно, большие габариты и массу; при безмуфтовом приводе зубья зубчатой передачи подвержены интенсивному износу и поломкам под воздействием вибраций (шимми) колес при посадке и взлете самолета, и при наличии муфты существенно возрастают габариты зубчатого редуктора; при двухступенчатом редукторе одна из ступеней которого является зубчатой волновой, поэтому понижается надежность электропривода.
Известен многодвигательный электропривод с зубчатым и волновым редукторами (патент US №8117945 от 26.09.2005), имеющий корпус с несколькими закрепленными на корпусе электродвигателями, на выходных валах которых установлены зубчатые шестерни, взаимодействующие с зубчатым колесом первой ступени зубчатого редуктора, на ступице которого установлено зубчатое колесо второй ступени зубчатого редуктора, которое взаимодействует с зубчатыми шестернями, закрепленными на входных валах с эксцентриками, размещенными внутри колеса эксцентриково-циклоидальной волновой передачи, к главному валу которой подсоединяется приводимый объект [патент US №8117945, фиг. 1с]
Недостатки данного многодвигательного электромеханического привода - в его сложности, значительных габаритах и невысокой надежности двухступенчатого зубчатого редуктора, а также в отсутствии механизма, позволяющего отключать многодвигательный электропривод от главного вала для его свободного вращения.
Известно эксцентриково-циклоидальное внутреннее или внешнее зацепление составных зубчатых профилей (патент RU №2385435 от 22.12.2008), состоящее из нескольких смещенных по фазе относительно друг друга колес с циклоидальным венцом, взаимодействующим с эксцентриковым валом с числом эксцентриков, равным числу колес. Каждый эксцентрик является цилиндрическим и имеет подшипник, установленный на эксцентрично смещенный участок общего вала. Вал приводится во вращение от одного двигателя любого типа, в том числе электродвигателя.
Недостаток электромеханического привода с редуктором, имеющим описанное зацепление, - сложность конструкции зацепления, высокая трудоемкость изготовления и пониженная надежность, обусловленная отсутствием резервирования электроприводов.
Известен многодвигательный электропривод поворота носовой опоры самолета (патент US №7854411 от 22.08.2006, прототип), включающий два электродвигателя, каждый из которых соединен с зубчатым редуктором первой ступени и с зубчатым волновым редуктором второй ступени, выходной вал которого соединен через управляемую муфту с зубчатой шестерней, взаимодействующей с зубчатым колесом, размещенным внутри корпуса, закрепленного на поворотной колонне носовой опоры шасси.
Недостатком известного многодвигательного электропривода является сложность и пониженная надежность трехступенчатого зубчато-волнового редуктора с включенной между второй и третьей ступенями управляемой зубчатой муфтой, имеющего пониженную надежность в условиях шимми-эффекта, возникающего при движении самолета по взлетно-посадочной полосе.
Известны система и устройство многодвигательного следящего безредукторного электропривода (заявка US №2014/0097859 от 12.12.2013), включающие:
- множество электродвигателей, каждый с датчиком углового положения вала и определителем скорости его вращения;
- множество блоков управления электродвигателями, каждый из которых обеспечивает подачу электрического тока каждому электродвигателю;
- микропроцессорные средства управления, образующие главный блок (контроллер), соединенный с множеством блоков управления электродвигателями и с датчиками положения валов электродвигателей, выдающий команды блокам управления электродвигателями в соответствии с заданными параметрами и положением валов.
В данной системе исключается соединение блоков управления с электродвигателями, не соответствующее заданному главным блоком управления.
В описании данного изобретения отсутствуют данные о работе множества электродвигателей на общий вал.
Известен многодвигательный электропривод, включающий несколько одинаковых по мощности электроприводов (патент RU №2326488 от 24.10.2006). Каждый электропривод включает электродвигатель, передаточный механизм (мультипликатор момента), датчик скорости вращения и угла поворота ротора электродвигателя, задатчик текущей угловой скорости и регулятор скорости вращения ротора электродвигателя, соединенные с микропроцессорными средствами управления в виде блока управления моментом электродвигателя и силового преобразователя, подключенного к обмоткам электродвигателя и соединенного с блоком управления. В данном многодвигательном электромеханическом приводе не раскрыта конструкция главного передаточного механизма от выходных валов электроприводов на главный вал, соединенный с объектом нагрузки, отсутствуют средства отсоединения множества электроприводов от главного вала для его свободного вращения.
Известен способ выработки команд для управления поворотом носовой опоры шасси самолета (US №2014/0156113 от 27.02.2013). Способ регламентирует сервоуправление двигателем для поворота носовой опоры на вычисляемый компьютером предельный угол, зависящий от скорости движения самолета и его длины.
Известен способ, включающий последовательность действий, связанных с управлением носовой опорой шасси самолета в процессе его передвижения по аэродрому (US №2011/0046819 от 07.10.2008). В способе предписывается определение углового положения носовой опоры на основе сигналов, поступающих от датчика углового положения к компьютеру, определение параметров углового перемещения носовой опоры и передвижения самолета, ограничение времени обработки данных, выдачи сигналов управления и информации для пилота.
Описанные способы не учитывают типа привода поворота носовой опоры шасси и особенности конструкции привода, влияющие на выполнение команд, вырабатываемых системой управления.
Известен способ работы многодвигательного электромеханического привода с вентильными электродвигателями с датчиками положения ротора (http://www.kaskod.ru/product/motorsrm/srm_article01/) с микропроцессорным блоком управления, электронным коммутатором и электромеханическим преобразователем, включающий:
- пуск МЭМП по сигналам, подаваемым ГБУ в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программы управления;
- разгон и торможение приводимого объекта с необходимым ускорением по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов;
- отслеживание углового положения главного выходного вала и приводимого объекта по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- остановка всех электродвигателей и приводимого объекта в заданном ГБУ угловом положении валов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов;
- изменение направления вращения главного вала с приводимым объектом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов.
В данном способе работы многодвигательного электромеханического привода не предусмотрена возможность свободного вращения главного вала с приводимым объектом.
Техническая задача изобретения - упрощение конструкции и повышение надежности многодвигательного электропривода поворота носовой опоры самолета.
Техническая задача решена в многодвигательном электроприводе поворота носовой опоры шасси самолета, состоящей из неподвижной части стойки и подвижной части стойки со штоком с поперечной осью и закрепленным на ней, по меньшей мере, одним колесом, который содержит:
- корпус многодвигательного привода поворота подвижной части стойки, закрепленный на неподвижной части стойки;
- несколько электроприводов с электродвигателями с редукторами, закрепленные на корпусе так, что оси электроприводов параллельны продольной оси носовой опоры, выходные валы редукторов имеют средства зацепления с цилиндрическим зубчатым колесом, установленным на подвижной части стойки;
- датчик углового положения штока относительно стойки;
- блоков управления следящими электроприводами;
- главного блока управления, соединенного интерфейсной шиной с датчиком углового положения подвижной части стойки и с блоками управления следящими электроприводами, при этом
- каждый электродвигатель следящего электропривода является бесколлекторным электродвигателем постоянного тока с возбуждением от постоянных магнитов;
- количество следящих электроприводов не менее трех;
- редуктор каждого следящего электропривода является волновым с телами вращения;
- выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления;
- цилиндрическое зубчатое колесо имеет зубья, образованные циклоидальной поверхностью;
- каждый выходной вал следящего электропривода является эксцентриковым с одним цилиндрическим эксцентриком и установленным на нем подшипником качения, взаимодействующим при вращении выходного вала с зубьями, образованными циклоидальной поверхностью цилиндрического зубчатого колеса, при этом оси выходных валов размещены на окружности, радиус которой определяется по зависимости:
Re=Rmax-e±rп,
где Re - радиус окружности, на которой размещены оси валов следящих электроприводов, описанной относительно оси подвижной части стойки носовой опоры;
Rmax - радиус окружности, на которой расположены вершины зубьев или впадины колеса соответственно внешнего (фиг. 7, 8) или внутреннего (фиг. 4, 5) эксцентриково-циклоидального зацепления, описанной относительно оси подвижной части стойки носовой опоры;
e - эксцентриситет цилиндрического эксцентрика;
rп - внешний радиус подшипника качения, установленного на цилиндрическом эксцентрике;
+rп - для внешнего эксцентриково-циклоидального зацепления;
-rп - для внутреннего эксцентриково-циклоидального зацепления.
Для уменьшения габаритов электропривода частота вращения ротора каждого электродвигателя находится в интервале 7000…100000 мин-1, а волновой редуктор с телами вращения имеет от одной до трех ступеней.
Для повышения надежности многодвигательного электропривода путем резервирования он имеет четыре следящих электропривода, закрепленных на корпусе попарно на осевых линиях, расположенных под углом ±45° к направлению движения самолета на противоположных сторонах от оси носовой опоры.
Технический эффект достигается при способе работы многодвигательного электропривода носовой опоры шасси самолета, включающем:
- пуск следящих электроприводов после посадки самолета по сигналу, поступающему в ГБУ от системы управления самолетом в соответствии с заданной скоростью самолета и алгоритмом, заложенным в программу управления;
- выполнение поворота штока с колесами при рулежке по сигналам, поступающим от ГБУ в блоки управления следящих электроприводов, и преобразуемым в них, в процессе отслеживания углового положения штока с колесами и выходных валов следящих электроприводов;
- вывод выходных валов следящих электроприводов из зацепления с зубчатым колесом и остановку всех следящих электроприводов в заданном ГБУ угловом положении выходных валов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов; при этом
- пуск следящих электроприводов для рулежки после посадки или перед взлетом самолета и достижения заданной скорости по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов, формирование и подачу от блоков управления последовательности управляющих сигналов для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии эксцентриков при вводе в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса;
- поворот подвижной части стойки со штоком на заданный угол при рулежке после посадки или перед взлетом осуществляется при поддержании заданного взаимного углового положения линий симметрии эксцентриков всех следящих электроприводов в соответствии с алгоритмом, заложенным в программе ГБУ;
- вывод следящих электроприводов из зацепления с зубчатым колесом при буксировке самолета осуществляется остановкой всех следящих электроприводов в заданном угловом положении их выходных валов по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, для занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью вала каждого следящего электропривода.
Технический эффект - упрощение конструкции и повышение надежности многодвигательного электропривода поворота носовой опоры самолета - обеспечивается следующей совокупностью отличительных признаков:
- каждый электродвигатель следящего электропривода является бесколлекторным электродвигателем постоянного тока с возбуждением от постоянных магнитов;
- количество следящих электроприводов не менее трех;
- редуктор каждого следящего электропривода является волновым с телами вращения;
- выходной вал каждого следящего электропривода имеет датчик углового положения, соединенный интерфейсной шиной с блоком управления соответствующего следящего электропривода и с главным блоком управления;
- цилиндрическое зубчатое колесо имеет зубья, образованные циклоидальной поверхностью;
- каждый выходной вал следящего электропривода является эксцентриковым с одним цилиндрическим эксцентриком и установленным на нем подшипником качения, взаимодействующим при вращении выходного вала с зубьями, образованными циклоидальной поверхностью цилиндрического зубчатого колеса, при этом оси выходных валов размещены на окружности, радиус которой определяется по зависимости:
Re=Rmax-e±rп.
Для уменьшения габаритов электропривода частота вращения ротора каждого электродвигателя находится в интервале 7000…100000 мин-1, а волновой редуктор с телами вращения имеет от одной до трех ступеней.
Для повышения надежности многодвигательного электропривода путем резервирования он имеет четыре следящих электропривода, закрепленных на корпусе попарно на осевых линиях, расположенных под углом ±45° к направлению движения самолета на противоположных сторонах от оси носовой опоры.
Технический эффект достигается при способе работы многодвигательного электропривода носовой опоры шасси самолета по п. 1, включающем:
- пуск следящих электроприводов для рулежки после посадки или перед взлетом самолета и достижения заданной скорости по сигналу, поступающему в ГБУ на определение углового положения выходных валов электроприводов, формирование и подачу от блоков управления последовательности управляющих сигналов для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии эксцентриков при вводе в зацепление с зубьями, образованными циклоидальной поверхностью зубчатого колеса;
- поворот подвижной части стойки со штоком на заданный угол при рулежке после посадки или перед взлетом осуществляется при поддержании заданного взаимного углового положения линий симметрии эксцентриков всех следящих электроприводов в соответствии с алгоритмом, заложенным в программе ГБУ;
- вывод следящих электроприводов из зацепления с зубчатым колесом при буксировке самолета осуществляется остановкой всех следящих электроприводов в заданном угловом положении их выходных валов по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, для занятия центрами всех (от 1 до n) эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью вала каждого следящего электропривода.
Данная совокупность отличительных признаков не обнаружена в ходе проведенного патентно-информационного поиска, следовательно, изобретение соответствует критерию «новизна».
Данная совокупность отличительных признаков не следует явно из уровня техники, поэтому изобретение соответствует критерию «изобретательский уровень».
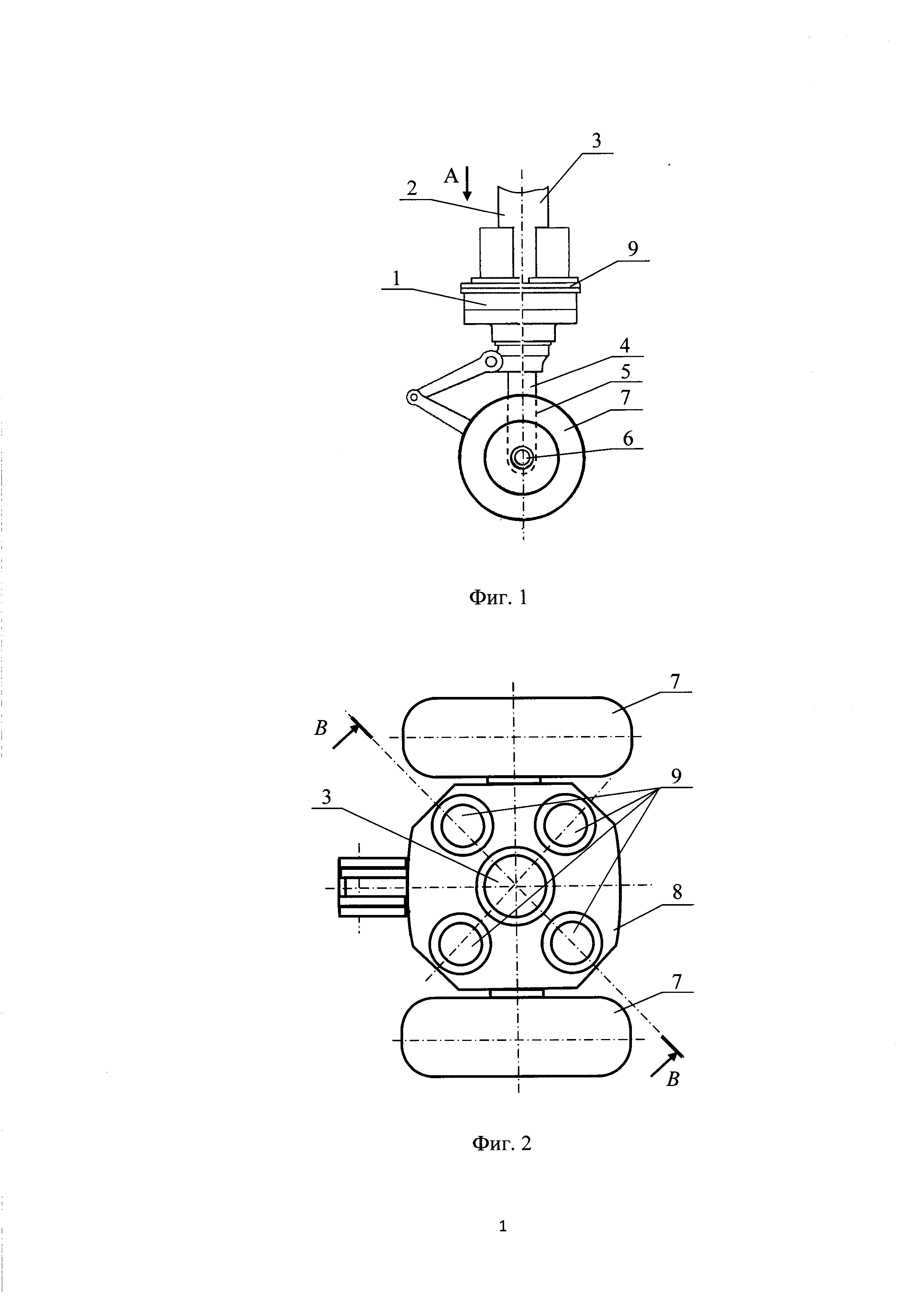
На фиг. 1 показана носовая опора самолета с многодвигательным электроприводом поворота.
На фиг. 2 - вид А на фиг. 1.
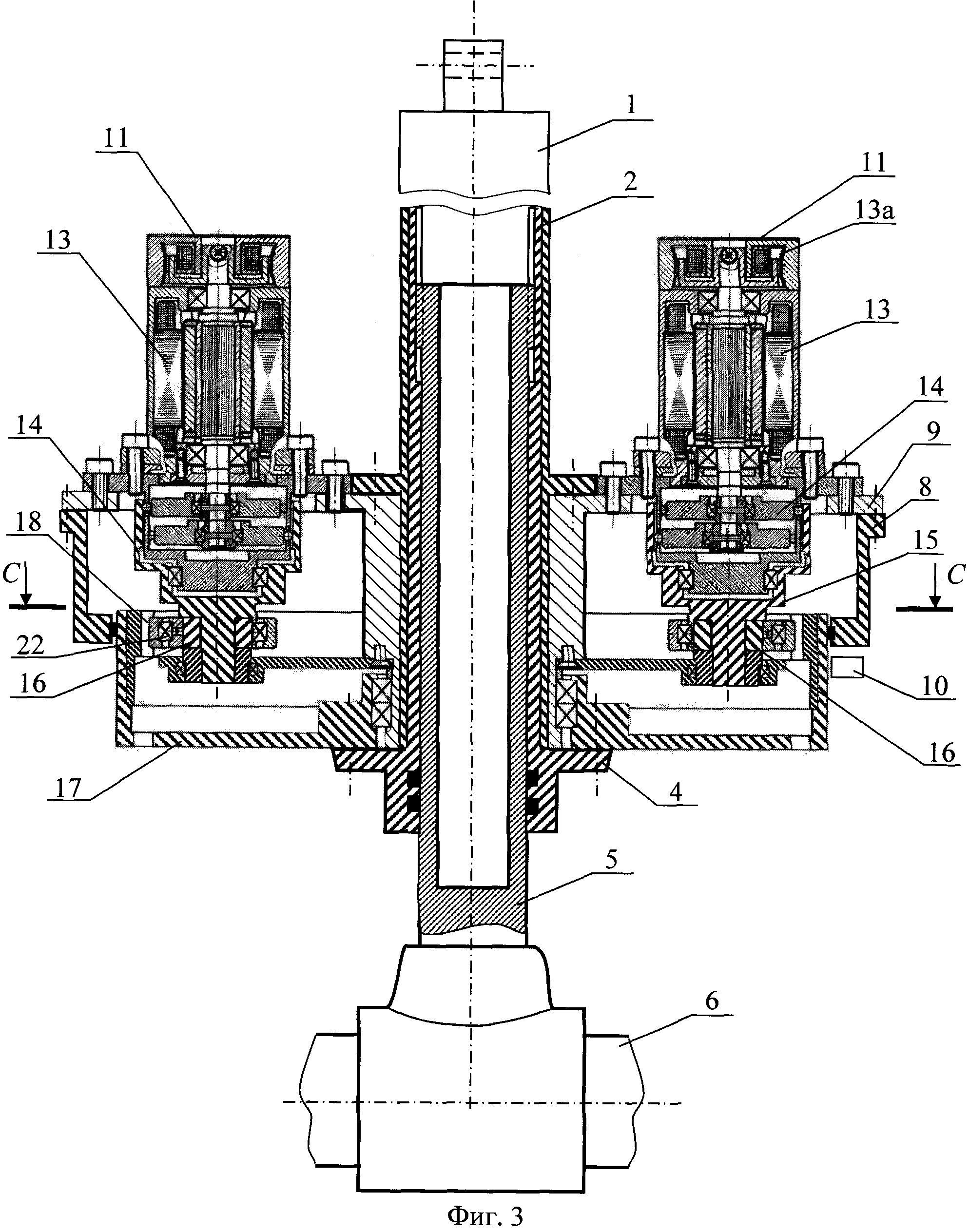
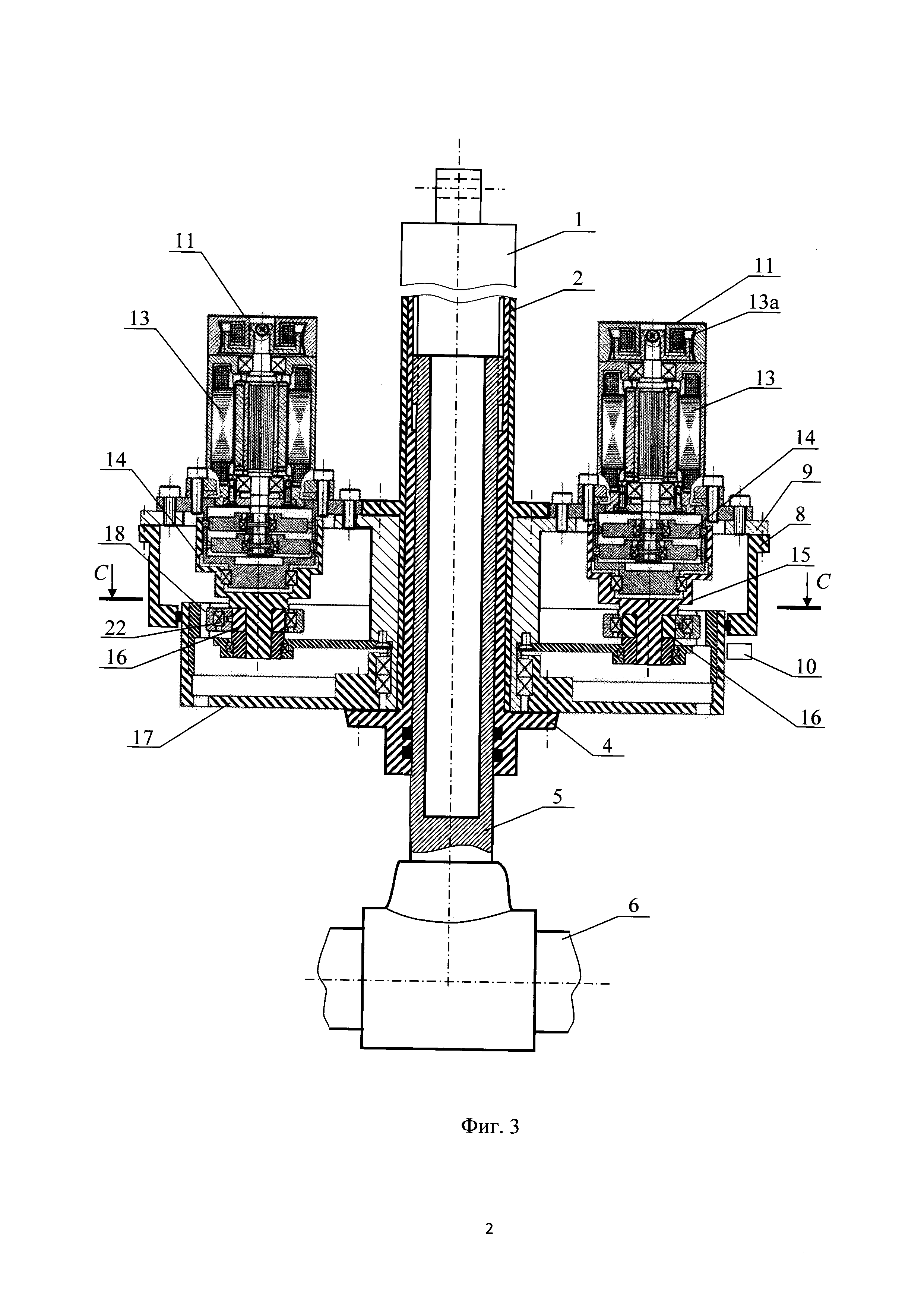
На фиг. 3 - сечение В-В на фиг. 2 (при внутреннем эксцентриково-циклоидальном зацеплении).
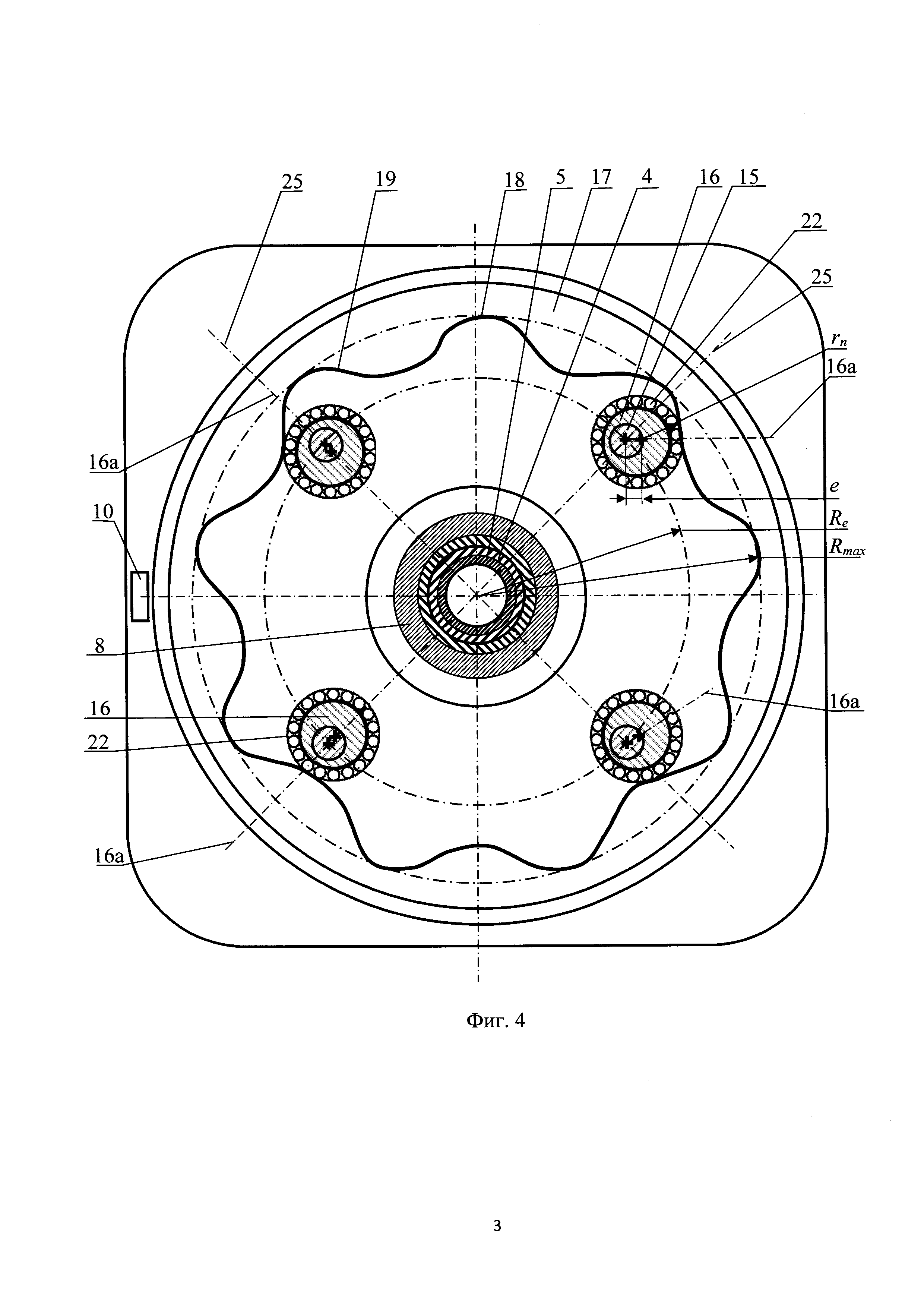
На фиг. 4 - сечение С-С на фиг. 3 (эксцентрики в состоянии зацепления с зубчатым колесом).
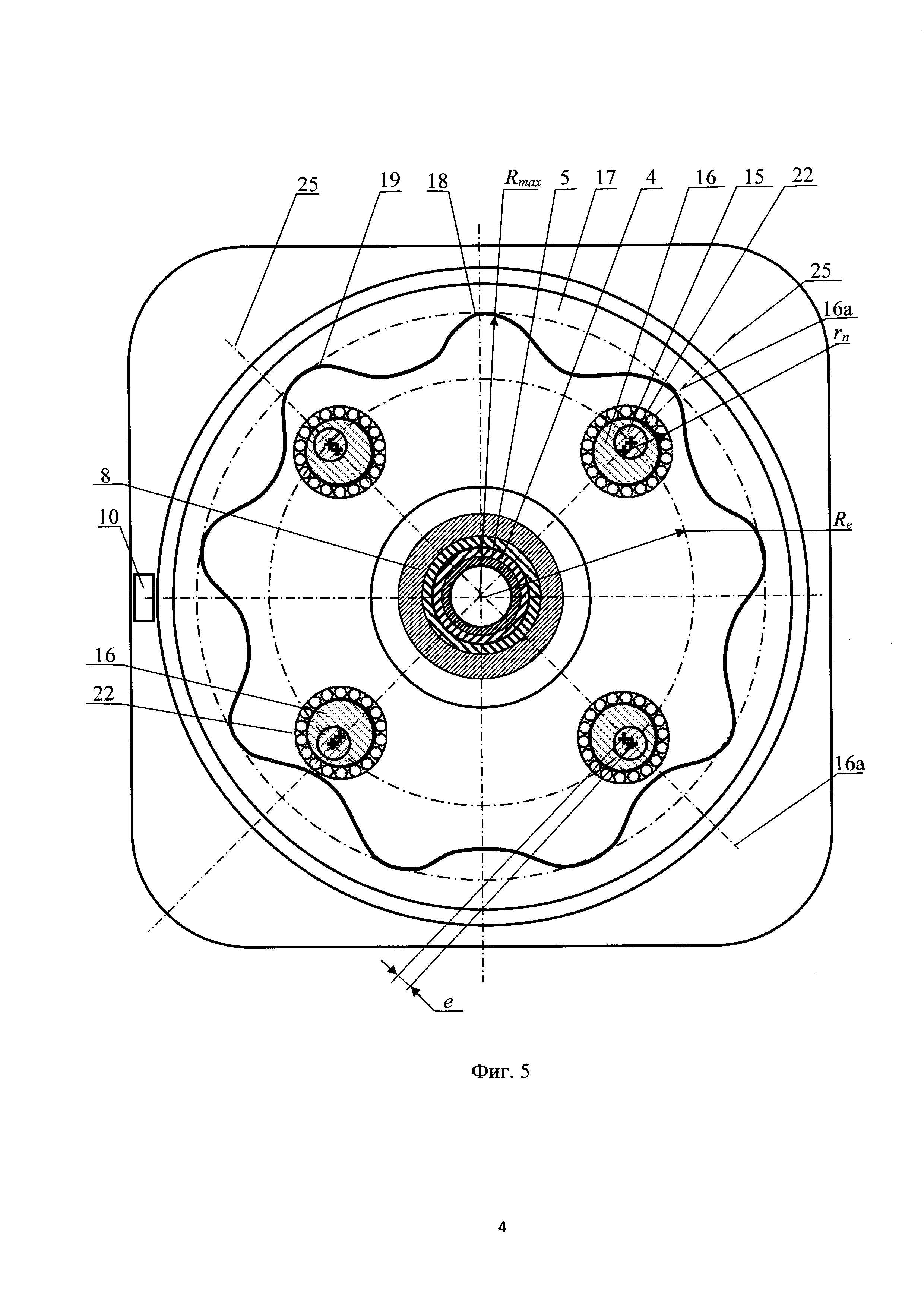
На фиг. 5 - сечение D-D на фиг. 4 (эксцентрики выведены из зацепления с зубчатым колесом).
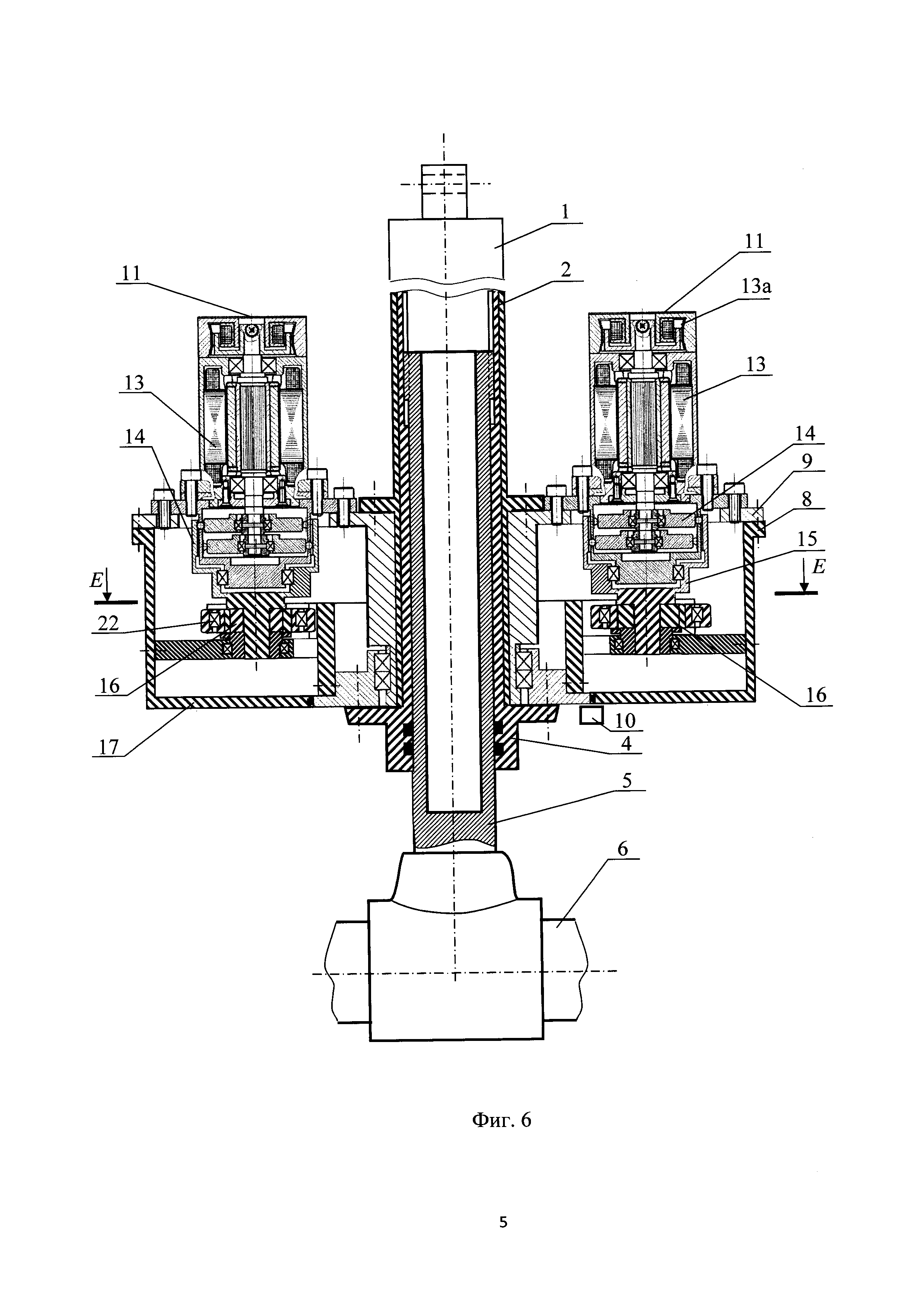
На фиг. 6 - сечение В-В на фиг. 2 (при внешнем эксцентриково-циклоидальном зацеплении).
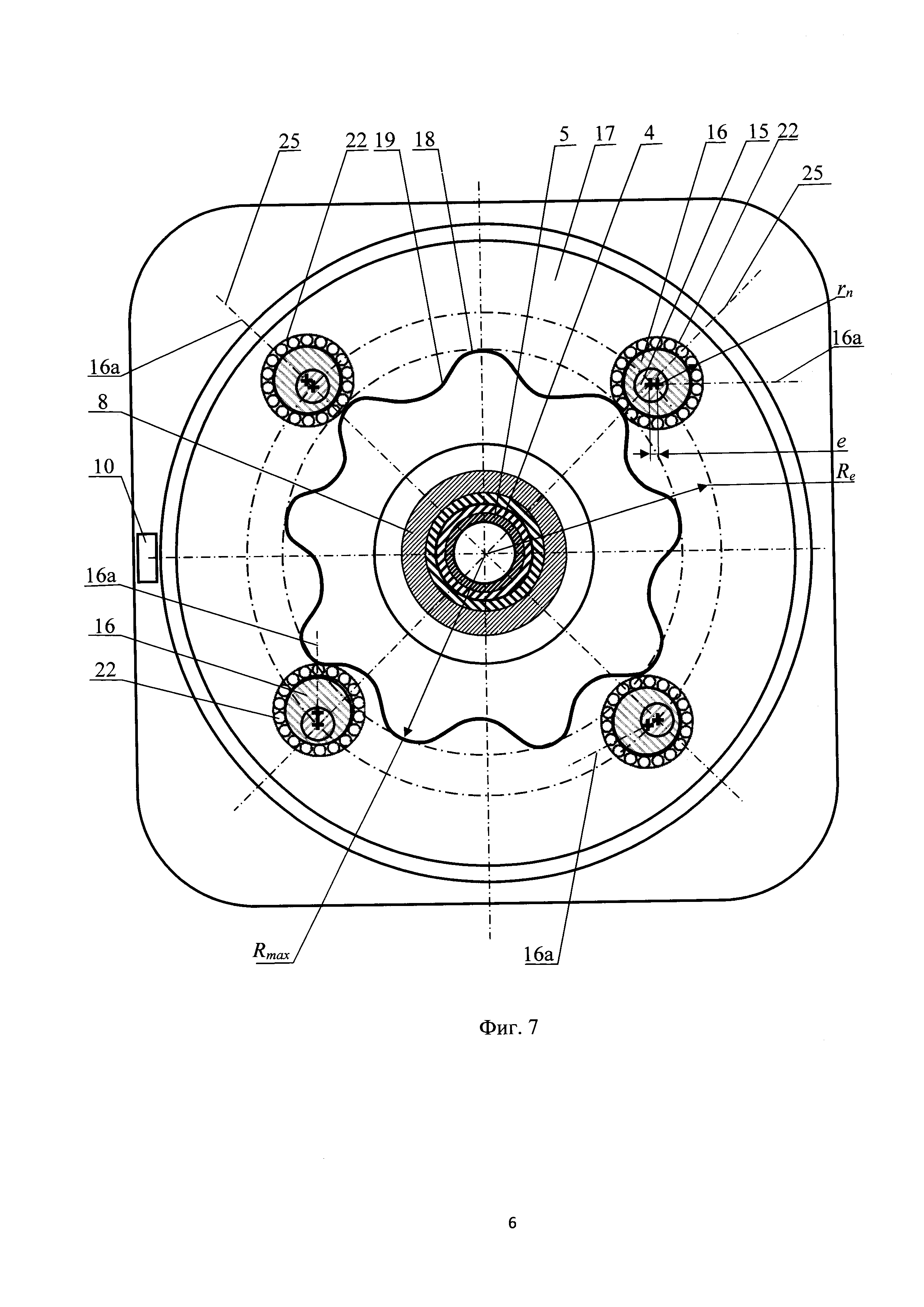
На фиг. 7 - сечение Е-Е на фиг. 6 (эксцентрики в состоянии зацепления с зубчатым колесом).
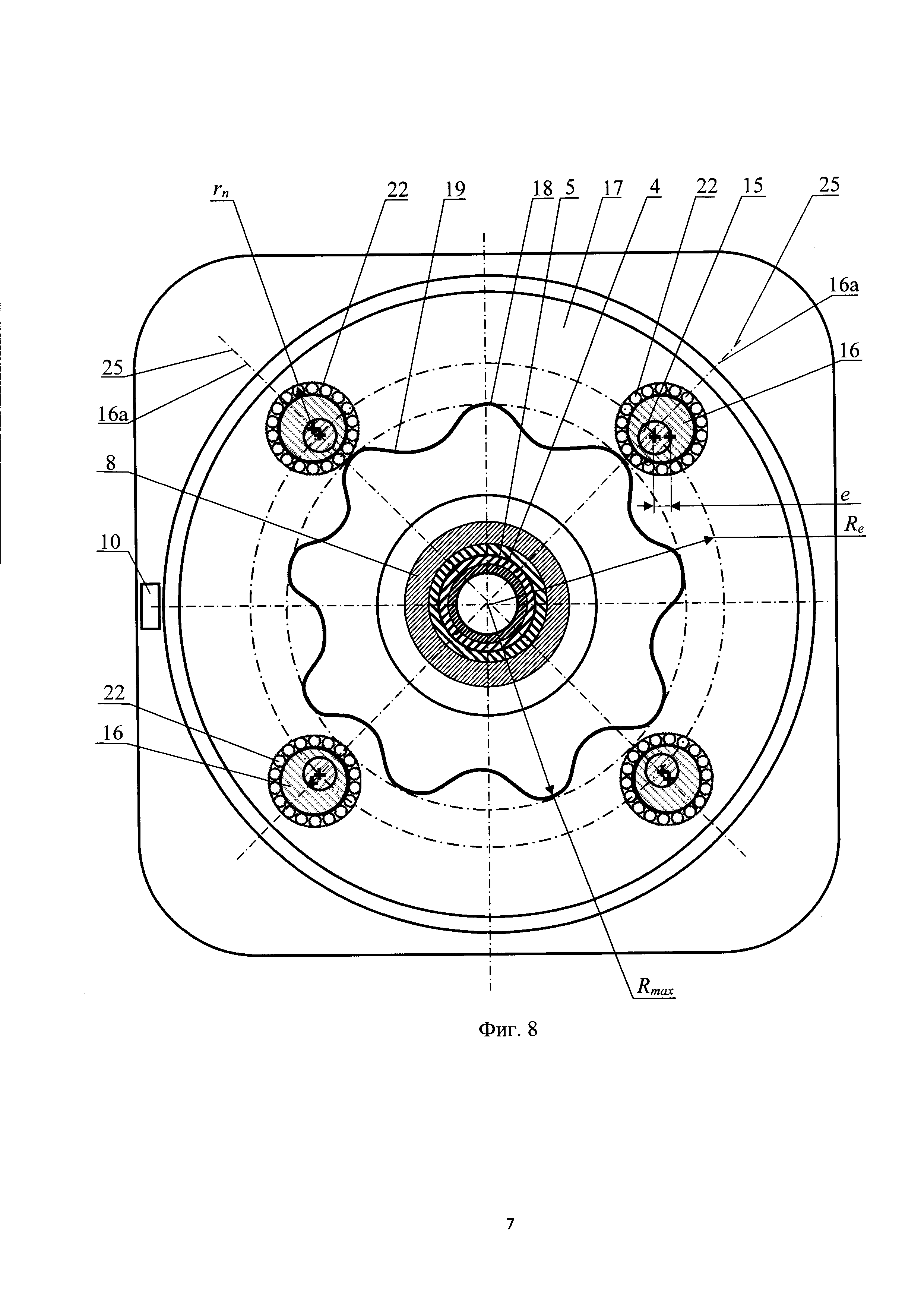
На фиг. 8 - сечение Е-Е на фиг. 6 (эксцентрики выведены из зацепления с зубчатым колесом).
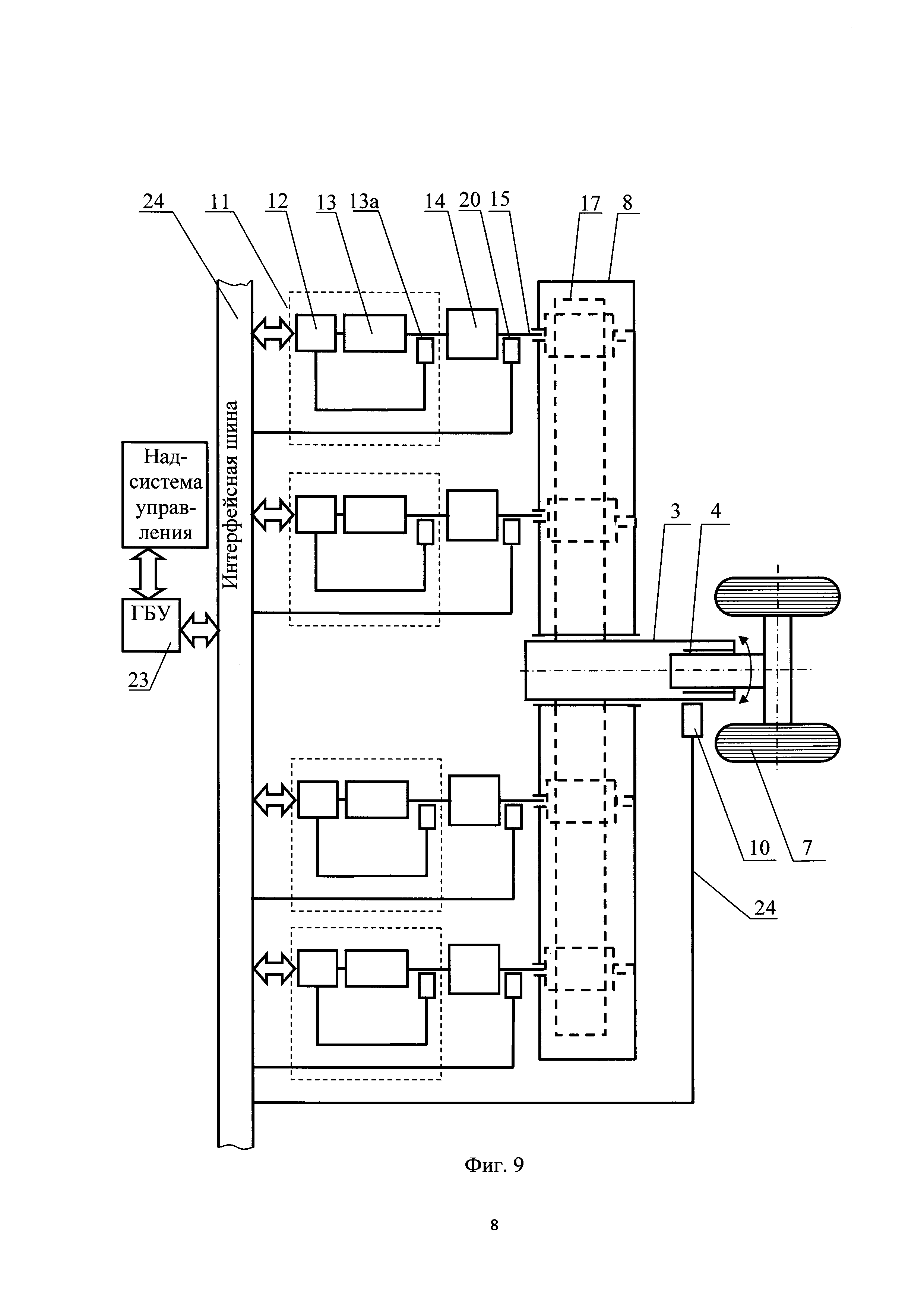
На фиг. 9 - блок-схема системы управления поворотом носовой опоры шасси.
Многодвигательный электропривод поворота носовой опоры 1 шасси самолета (фиг. 1-9) состоит из:
- неподвижной части 2 стойки 3 (фиг. 1, 2) и подвижной части 4 стойки 3 со штоком 5 с поперечной осью 6 и закрепленным на ней, по меньшей мере, одним колесом 7;
- корпуса 8 многодвигательного привода 9 поворота подвижной части 4 стойки 3, закрепленного на неподвижной части 2 стойки 3;
- датчика 10 (фиг. 3) углового положения подвижной части 4 стойки 3 относительно неподвижной части 2;
- четырех следящих электроприводов 11 (фиг. 1, 2, 9) с блоками управления 12 (фиг. 9), с бесколлекторными электродвигателями 13 постоянного тока с возбуждением от постоянных магнитов и с волновыми редукторами 14 (фиг. 3, 6) с телами вращения, закрепленных на корпусе 8 так, что оси электроприводов параллельны продольной оси носовой опоры 1, выходные валы 15 редукторов 14 являются уравновешенными выходными валами следящих электроприводов 11 и имеют средства зацепления в виде выполняющих роль однозубой шестерни цилиндрических эксцентриков 16 с закрепленным на подвижной части 4 стойки 3 цилиндрическим зубчатым колесом 17, зубья 18 которого (фиг. 4, 5, 7, 8) образованы циклоидальной поверхностью 19 (гипо-циклоидальной для внутреннего зацепления, фиг. 4, 5 и эпициклоидальной - для внешнего зацепления, фиг. 7, 8), а количество зубьев 18 равно или более семи. Так как передаточное отношение такой передачи равно числу зубьев, то при меньшем количестве зубьев эксцентриково-циклоидального зацепления можно использовать зубчатую передачу с эвольвентным зацеплением. Датчики 20 углового положения выходных валов 15 соединены интерфейсной шиной 21 (фиг. 9) с блоками управления 12 соответствующих следящих электроприводов 11, а каждый электродвигатель 13 имеет собственный датчик 13а углового положения ротора (фиг. 3, 6) соединенный с блоком управления 12;
- на цилиндрическом эксцентрике 16, имеющем симметрию относительно линии 16а (фиг. 4, 7) каждого выходного вала 15 следящего электропривода 11 установлен подшипник качения 22 (фиг. 3-8), взаимодействующий при вращении выходного вала 15 с зубьями 18, цилиндрического зубчатого колеса 17, при этом оси выходных валов 15 размещены на окружности, радиус которой определяется по зависимости (фиг. 4, 7):
Re=Rmax-e±rп,
где Re - радиус окружности, описанной относительно оси стойки 3, на которой размещены оси выходных валов 15 следящих электроприводов 11;
Rmax - радиус окружности, описанной относительно оси главного вала, на которой расположены вершины зубьев 18 колеса 17 внутреннего эксцентриково-циклоидального зацепления (фиг. 4, 5) или впадины колеса 17 внешнего эксцентриково-циклоидального зацепления (фиг. 7, 8);
e - эксцентриситет цилиндрического эксцентрика 16;
rп - внешний радиус подшипника 22 качения, установленного на цилиндрическом эксцентрике 16;
-rп - для внутреннего эксцентриково-циклоидального зацепления (фиг. 4);
+rп - для внешнего эксцентриково-циклоидального зацепления (фиг. 7);
Система управления многодвигательным электроприводом имеет главный блок управления 23 (фиг. 9), соединенный интерфейсной шиной 24 с датчиком 10 углового положения подвижной части 4 стойки 3 и с блоками управления 12 следящими электроприводами 11.
Для повышения надежности многодвигательного электропривода путем резервирования он имеет четыре следящих электропривода 11, закрепленных на корпусе 8 попарно на осевых линиях, расположенных под углом ±45° (фиг. 2) к направлению движения самолета на противоположных сторонах от оси носовой опоры 1.
Для уменьшения габаритов электроприводов 11 частота вращения ротора каждого электродвигателя 13 находится в интервале 7000…100000 мин-1, а волновой редуктор 14 с телами вращения имеет от одной (фиг. 3, 6) до трех ступеней (не показаны). Результирующее передаточное отношение волнового редуктора и эксцентриково-циклоидальной передачи может достигать при одноступенчатом волновом редукторе - 1200, при двухступенчатом - 30000, при трехступенчатом - 100000, что позволяет существенно уменьшить габариты многодвигательного электропривода.
Способ работы многодвигательного электропривода носовой опоры 1 шасси самолета включает:
- пуск следящих электроприводов 11 для рулежки после посадки или перед взлетом самолета и достижения заданной скорости (в интервале 20…40 км/час) по сигналу, поступающему от ГБУ 23 (фиг. 9) на определение углового положения выходных валов 15 с помощью датчиков 20, формирование и подачу от блоков управления 12 последовательности управляющих сигналов для установки поворотом каждого из выходных валов 15 в заданное взаимное угловое положение линий 16а симметрии эксцентриков 16 (фиг. 4, 7) при вводе из нейтрального положения (фиг. 5, 8) в зацепление с зубьями 18, образованными циклоидальной поверхностью 19 зубчатого колеса 17;
- поворот подвижной части 14 стойки 3 со штоком 5 и колесами 7 на заданный угол (меньший ±80°) при рулежке после посадки или перед взлетом осуществляется по сигналам, поступающим от ГБУ 23 в блоки управления 12 следящих электроприводов 11 и преобразуемым в них, в процессе отслеживания углового положения подвижной части 4 стойки 3 относительно неподвижной части 2 и выходных валов 15 следящих электроприводов 11 при сохранении взаимного углового положения линий 16а симметрии эксцентриков 16 (фиг. 4, 7) всех следящих электроприводов 11 в соответствии с алгоритмом, заложенным в программе ГБУ 23;
- вывод эксцентриков 16 из зацепления с зубчатым колесом 17 при буксировке самолета осуществляется поворотом всех следящих электроприводов 11 до заданного углового положения их выходных валов 15 по сигналам, поступающим от ГБУ 23 и преобразуемым в блоках управления 12 следящих электроприводов 11 в соответствии с программой управления, задаваемой алгоритмом, до занятия центрами 16b всех (от 1 до n) эксцентриков 16 положения на радиальных линиях 25 (фиг. 7, 8), соединяющих ось зубчатого колеса 17 с осью выходных валов 15 каждого следящего электропривода 11.
Предложенная конструкция многодвигательного электромеханического привода позволяет снизить габариты и массу электропривода поворота стойки шасси за счет использования высокооборотных малогабаритных вентильных электродвигателей при повышении надежности, так как современные вентильные электродвигатели, волновые редукторы и системы микропроцессорного управления электроприводами весьма надежны.
Электромеханический привод закрылка самолета
Электромеханический привод предкрылка самолета
Электромеханический привод интерцептора крыла самолета
Устройство электромеханического привода дискового тормоза колеса основной опоры шасси самолета
Электромеханический линейный привод
Устройство и способ работы привода уборки-выпуска шасси самолета
Многодвигательный электропривод колеса шасси самолета и способ его работы
Многодвигательный электромеханический привод и способ его работы
Система рулевых поверхностей с электромеханическими приводами для управления основными летными функциями самолета
Электромеханический привод гребного винта судна
Электромеханический привод закрылка самолета
Электромеханический привод предкрылка самолета
Электромеханический привод интерцептора крыла самолета
Устройство электромеханического привода дискового тормоза колеса основной опоры шасси самолета
Электромеханический линейный привод
Устройство и способ работы привода уборки-выпуска шасси самолета
Многодвигательный электропривод колеса шасси самолета и способ его работы
Многодвигательный электромеханический привод и способ его работы
Система рулевых поверхностей с электромеханическими приводами для управления основными летными функциями самолета
Электромеханический привод гребного винта судна

