Результат интеллектуальной деятельности: АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА
Вид РИД
Изобретение
Изобретение относится к аварийно-спасательным средствам, используемым в зонах катастроф, и может быть использовано для уменьшения массы и габаритов спасательных машин шагающего типа и снижения энергозатрат на движение.
Известен шагающий движитель (авторское свидетельство №418366 А1, МПК В62D 57/02, опубл. 05.03.1974 г.), содержащий корпус, установленный с возможностью возвратно-поступального перемещения посредством реверсивного привода на продольной штанге, на концах которой смонтированы пары разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире и связанную с реверсивным приводом поворота платформу с выдвижными стойками. Недостатком данного движителя является периодичность движения корпуса, в результате чего большую часть времени цикла составляет время переноса штанги, подъема и опускания опорных стоек.
Известен шагающий движитель для перемещения по местности со сложным рельефом (патент на полезную модель №87404, B62D 57/02, опубл. 10.10.2009 г.), содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, снабженную дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса, а расстояние между наружными крайними точками пары стоек нижней штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги.
Недостатком данной конструкции является то, что расстояние между стойками каждой пары верхней штанги ограничивает угол поворота штанг во время перемещения корпуса и штанги. Чем длиннее штанги, тем меньше угол поворота, а следовательно, меньше возможность маневрирования между вертикальными препятствиями и профильная проходимость.
Наиболее близкой к заявленному техническому решению является аварийно-спасательная машина (патент на изобретение №2476372, B66C 23/36, опубл. 27.02.2013 г.), содержащая шасси, поворотную стойку с шарнирно закрепленной на ней стрелой и приводной гидроцилиндр, который взаимодействует с поворотной стойкой, поворотная стойка шарнирно соединена с поворотной платформой, установленной на шасси, причем шасси состоит из корпуса, в котором размещены энергетическая установка и блок системы управления, и прикрепленной к его верхней части на вертикальном шарнире и связанной с реверсивным приводом поворота платформы, которая состоит из верхнего и нижнего поворотных погонов, по бортам каждого из которых закреплены пары направляющих, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги, связанные с приводами горизонтального перемещения, на концах штанг смонтированы выдвижные вертикальные опорные стойки, связанные с приводами вертикального перемещения. При этом стрела выполнена в виде пространственного исполнительного механизма, ребрами которого являются телескопические гидроцилиндры.
Недостатком данной конструкции является то, что реверсивные привода поворота нижнего и верхнего погонов платформы и поворотной платформы находятся в корпусе, увеличивая его габариты, а для соединения приводов поворота с верхним и нижним погонами и поворотной платформой используются коаксиальные трансмиссионные валы, увеличивая массу аварийно-спасательной машины, что уменьшает опорную проходимость, возможность курсового маневрирования и увеличивает энергозатраты на движение.
Техническая задача заключается в уменьшении энергозатрат на движение, повышении опорной проходимости и возможности маневрирования между вертикальными препятствиями за счет уменьшения массы и габаритов транспортного средства.
Техническим результатом заявленной конструкции аварийно-спасательной машины является создание новой конструкции с уменьшенной массой и габаритами, что позволяет уменьшить энергозатраты на движение, увеличить опорную проходимость и возможность передвижения между вертикальными препятствиями.
Указанный технический результат достигается тем, что в аварийно-спасательной машине, содержащей корпус, в котором размещены энергетическая установка и блоки системы управления, и прикрепленную к его верхней части платформу, связанную с реверсивным приводом поворота и состоящую из верхней и нижней частей, по бортам каждой из которых закреплены направляющие, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги, связанные с приводами горизонтального перемещения, а на концах штанг смонтированы выдвижные вертикальные опорные стойки, связанные с приводами вертикального перемещения, причем на верхней части платформы установлена рама, с которой шарнирно соединены поворотная стойка и телескопический привод перемещения, взаимодействующий с поворотной стойкой, а на поворотной стойке шарнирно закреплена стрела, выполненная в виде пространственного исполнительного механизма, ребрами которого являются телескопические приводы перемещения, реверсивный привод поворота верхней части платформы установлен на нижней части платформы, горизонтальные штанги выполнены в виде шлицевых валов с шариковыми гайками, установленными в направляющих, а концы каждой штанги соединены цепной передачей с реверсивно вращающимся приводом горизонтального перемещения. Кроме того, телескопические приводы перемещений стрелы и поворотной стойки выполнены электромеханическими.
Установка реверсивного привода поворота верхней части платформы на нижней части позволяет уменьшить массу и габариты корпуса и всей аварийно-спасательной машины, что уменьшает энергозатраты на движение и повышает опорную проходимость, а также улучшает возможность прохождения между вертикальными препятствиями, например в дверной проем.
Выполнение горизонтальных штанг в виде шлицевых валов с шариковыми гайками, воспринимающими крутящий момент от боковых нагрузок, позволяет уменьшить массу аварийно-спасательной машины, потери на трение и энергозатраты на движение.
Выполнение приводов горизонтального перемещения в виде незамкнутой цепной передачи позволяет уменьшить массу аварийно-спасательной машины и энергозатраты на движение.
Выполнение телескопических приводов перемещений электромеханическими позволяет исключить гидросеть и насосную станцию, тем самым уменьшить массу аварийно-спасательной машины и энергозатраты на движение.
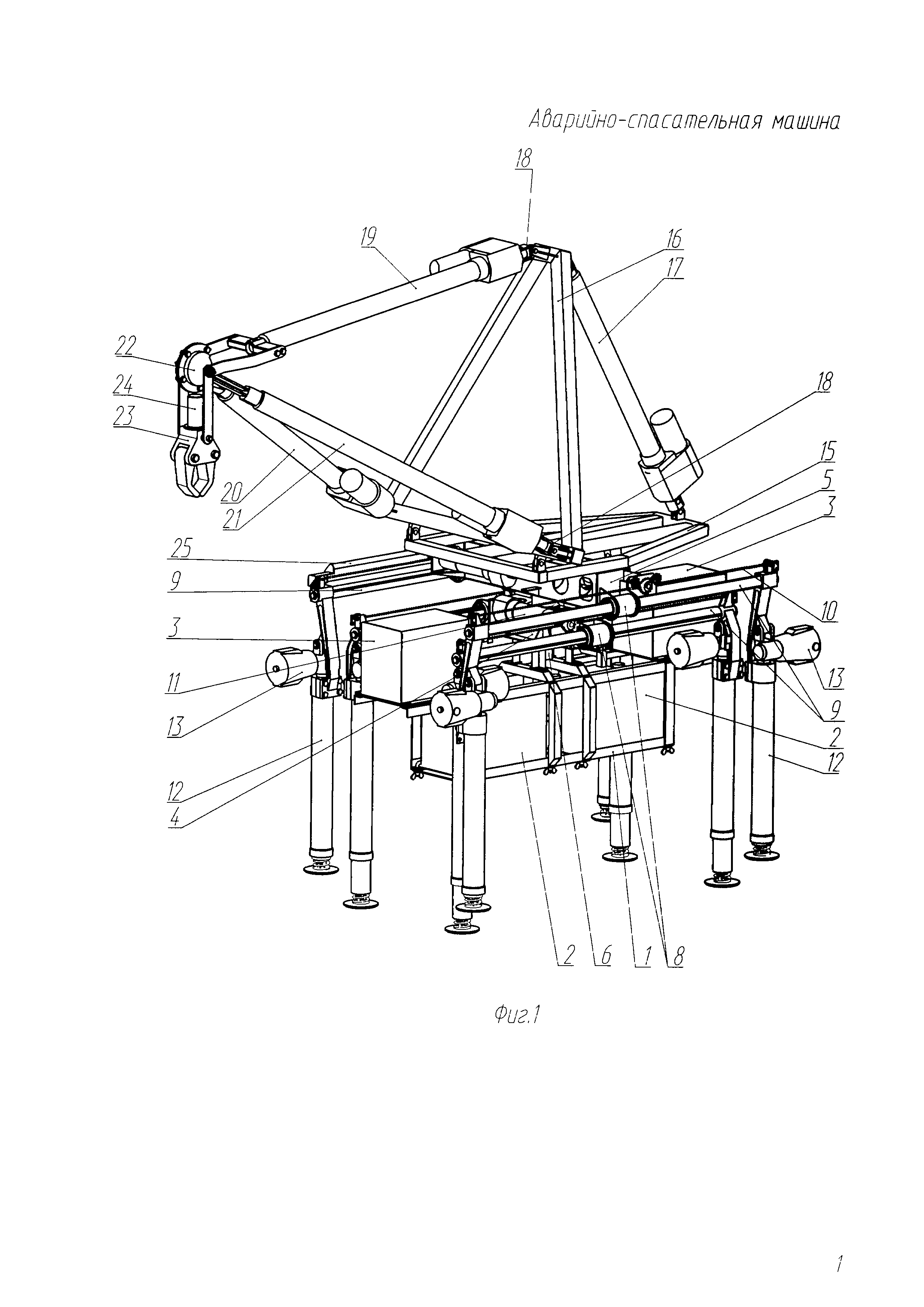
На фиг. 1 представлен общий вид аварийно-спасательной машины.
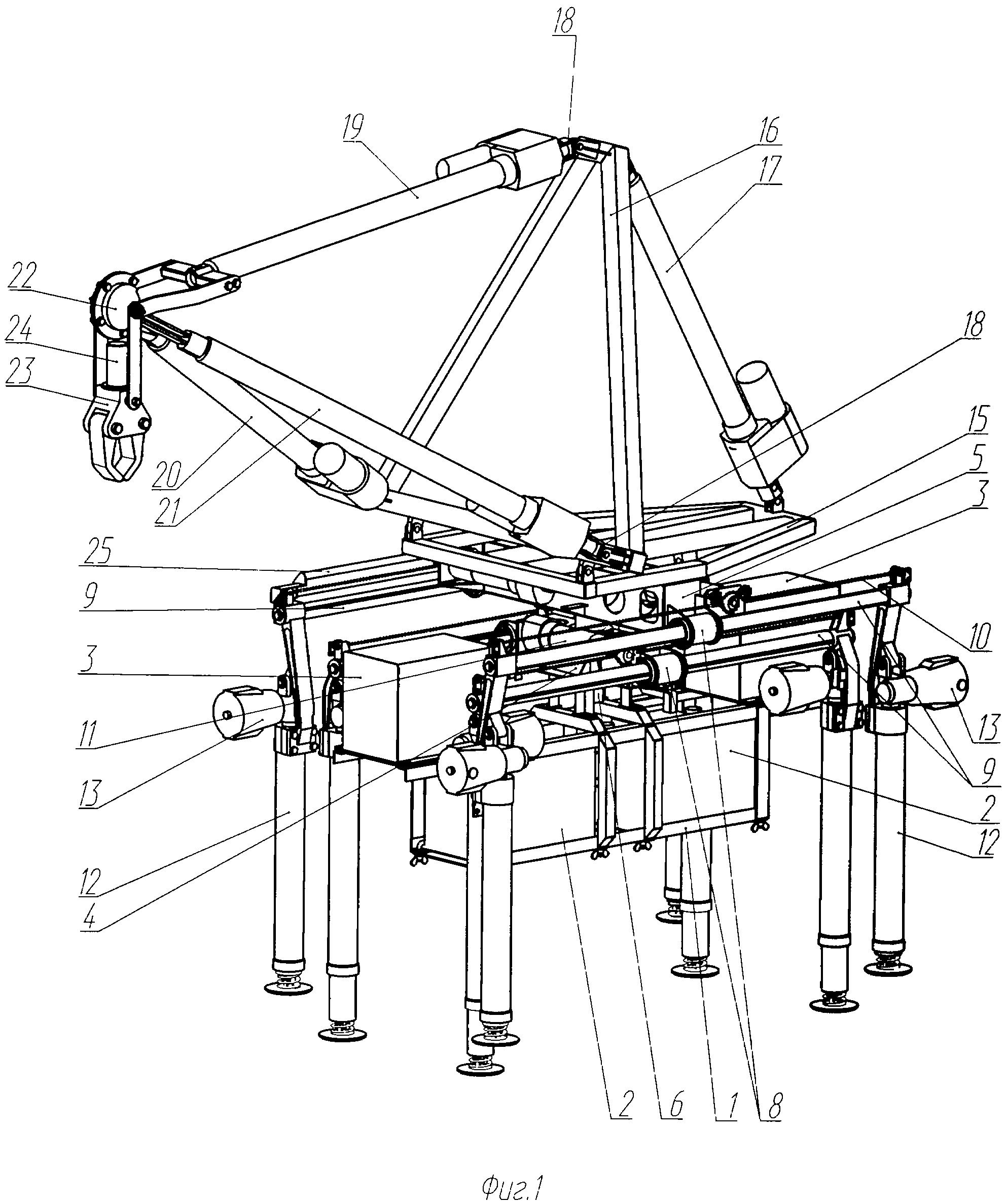
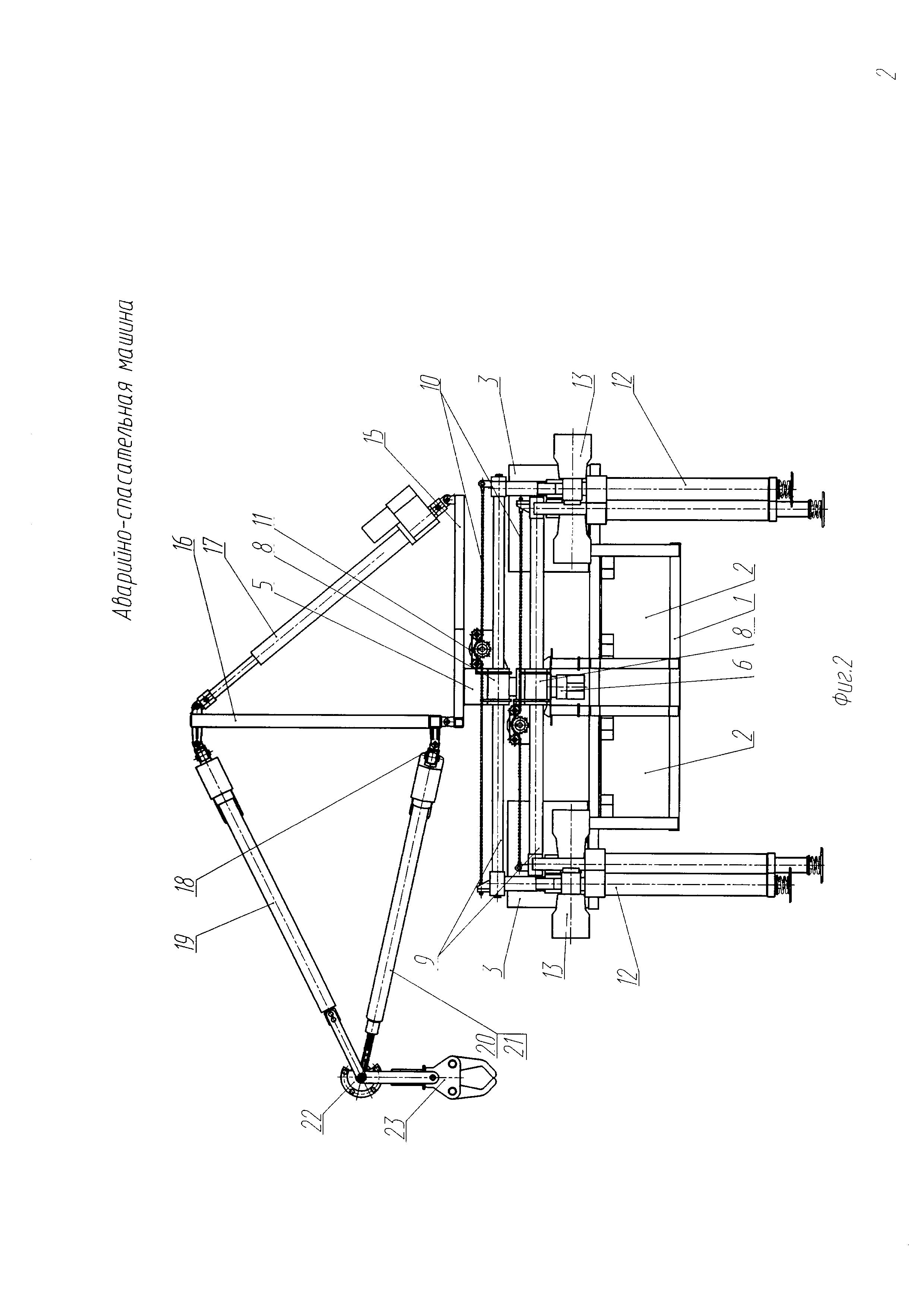
На фиг. 2 представлен общий вид аварийно-спасательной машины, вид сбоку.
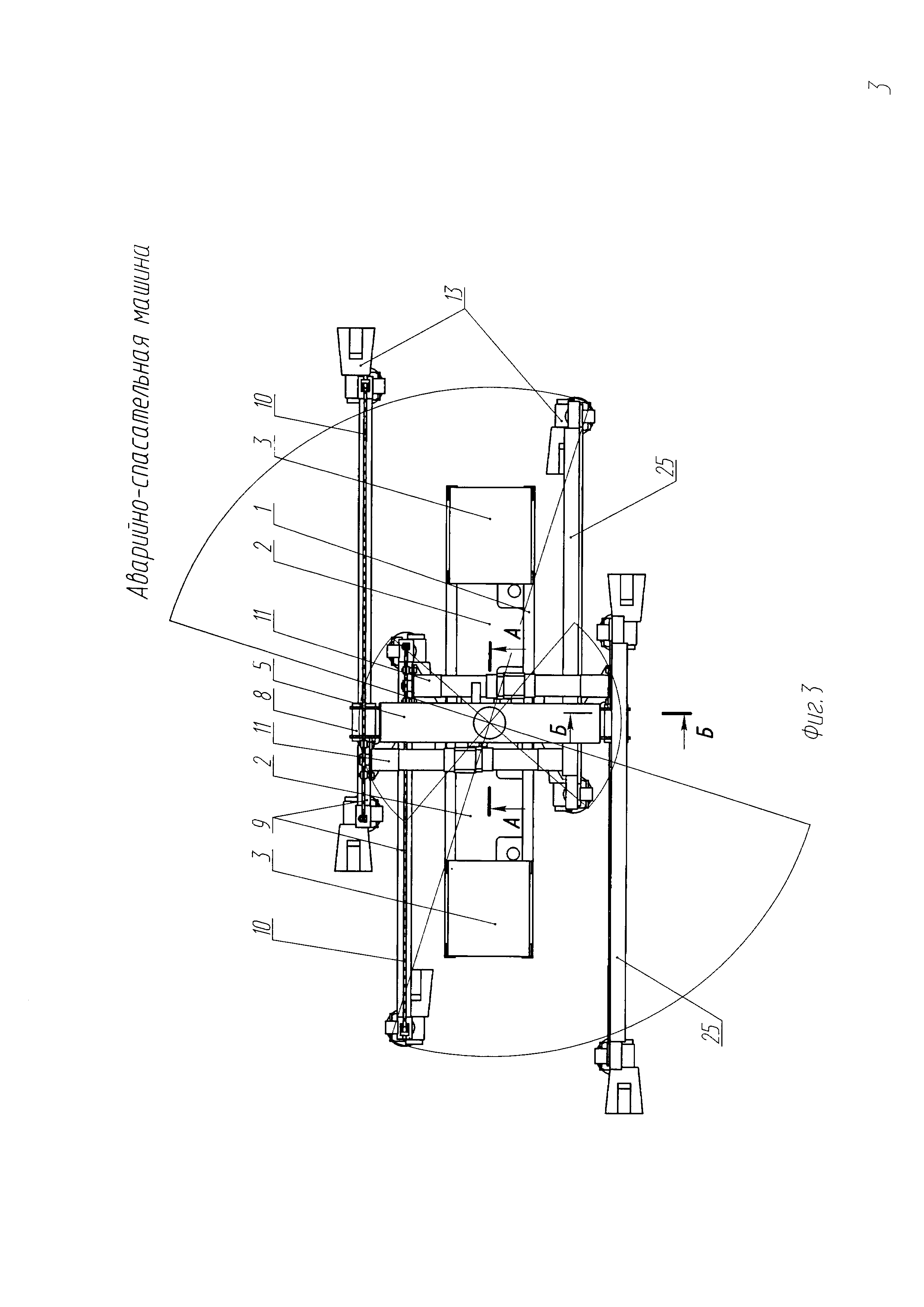
На фиг. 3 представлен общий вид аварийно-спасательной машины с положением ног при повороте.
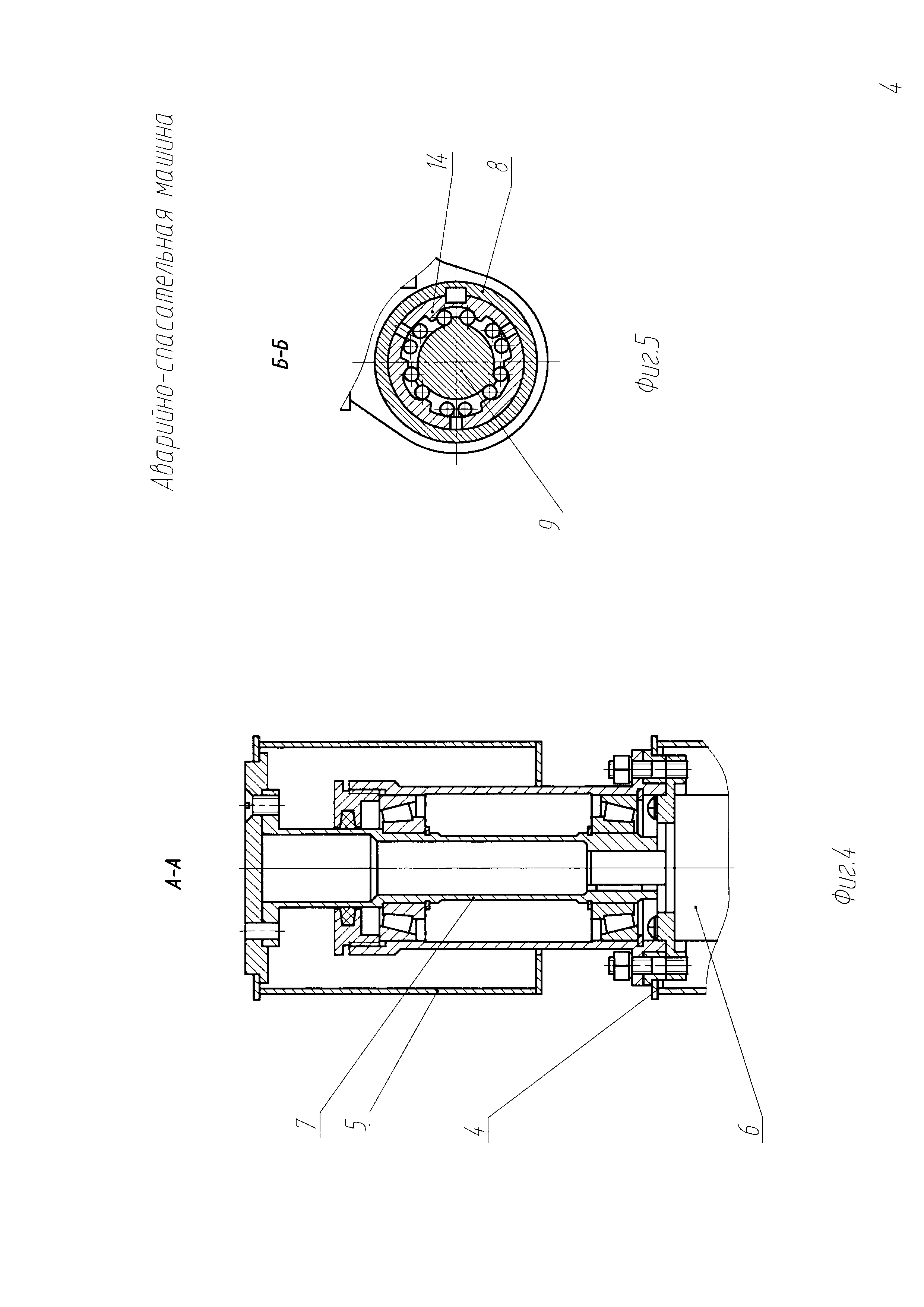
На фиг. 4 представлен реверсивный привод поворота.
На фиг. 5 представлена шариковая гайка с направляющей.
Предлагаемая аварийно-спасательная машина содержит корпус 1, в котором размещены энергетическая установка 2, выполненная в виде аккумуляторных батарей, и блоки управления 3, и прикрепленную к верхней части корпуса 1 платформу, состоящую из нижней 4 и верхней 5 частей. На нижней части 4 платформы установлен реверсивный привод поворота 6, соединенный валом 7 с верхней частью 5 платформы. По бортам верхней части 5 и нижней части 4 платформы закреплены направляющие 8, в которых установлены горизонтальные штанги 9, концы которых цепной передачей 10 связаны с реверсивно вращающимися приводами 11 горизонтального перемещения. На концах горизонтальных штанг 9 смонтированы выдвижные вертикальные опорные стойки 12, связанные с приводами вертикального перемещения 13. В направляющих 8 установлены шариковые гайки 14, по которым перемещаются горизонтальные штанги 9, выполненные в виде шлицевых валов. На верхней части 5 платформы установлена рама 15, с которой шарнирно соединены поворотная стойка 16 и один конец телескопического привода 17, другой конец которого шарнирно соединен с поворотной стойкой 16. С поворотной стойкой 16 двухстепенными шарнирами 18 соединены одним концом телескопические привода 19, 20, 21, другие концы которых связаны унифицированным шарнирным узлом 22. На унифицированном шарнирном узле 22 смонтирован схват 23 с приводом 24, обеспечивающий операции захвата материалов в зоне обслуживания. Для защиты цепных передач 10 могут быть установлены кожухи 25, закрепляемые на концах горизонтальных штанг 9.
Работа аварийно-спасательной машины осуществляется следующим образом.
При прямолинейном движении горизонтальные штанги 9 по бортам нижней части 4 платформы являются опорными, т.к. выдвижные вертикальные опорные стойки 12 этих горизонтальных штанг 9 находятся в контакте с опорной поверхностью. Горизонтальные штанги 9 по бортам верхней части 5 платформы являются неопорными (выдвижные вертикальные опорные стойки 12 этих горизонтальных штанг 9 подняты относительно опорной поверхности) и перемещаются в направляющих 8 в заданном направлении относительно верхней части 5 платформы, при этом одновременно корпус 1 перемещается в том же направлении относительно опорных горизонтальных штанг 9 нижней части 4 платформы. Достигнув крайнего переднего положения, неопорные горизонтальные штанги 9 верхней части 5 платформы останавливаются и начинают движение назад относительно корпуса 1, а размещенные на них выдвижные вертикальные опорные стойки 12 опускаются до соприкосновения с опорной поверхностью. Неопорные горизонтальные штанги 9 верхней части 5 платформы становятся опорными, а опорные, размещенные по бортам нижней части 4 платформы, неопорными за счет того, что выдвижные вертикальные опорные стойки 12 этих горизонтальных штанг 9 поднимаются относительно опорной поверхности на заданную высоту. Далее горизонтальные штанги 9 нижней части 4 платформы перемещаются в направляющих 8 в заданном направлении относительно нижней части 4 платформы, при этом одновременно корпус 1 перемещается в том же направлении относительно опорных горизонтальных штанг 9 верхней части 5 платформы. Достигнув крайнего переднего положения, неопорные горизонтальные штанги 9 нижней части 4 платформы останавливаются и начинаются движение назад относительно корпуса 1, а размещенные на них выдвижные вертикальные опорные стойки 12 опускаются до соприкосновения с опорной поверхностью. Неопорные горизонтальные штанги 9 нижней части 4 платформы становятся опорными, а опорные, размещенные по бортам верхней части 5 платформы, неопорными за счет того, что выдвижные вертикальные опорные стойки 12 этих горизонтальных штанг 9 поднимаются относительно опорной поверхности на заданную высоту. Далее цикл повторяется. Управление шагающим движителем осуществляется блоками управления 3, размещенными в корпусе 1.
Для изменения направления движения неопорные горизонтальные штанги 9, размещенные по бортам нижней части 4 платформы, устанавливаются в противоположные крайние положения, размещенные на них выдвижные вертикальные опорные стойки 12 опускаются до соприкосновения с опорной поверхностью и горизонтальные штанги 9 нижней части 4 платформы становятся опорными. Выдвижные вертикальные опорные стойки 12 на горизонтальных штангах 9, расположенных по бортам верхней части 5 платформы, поднимаются и эти горизонтальные штанги 9 устанавливаются в противоположные крайние положения относительно опорных горизонтальных штанг 9, расположенных по бортам нижней части 4 платформы. При таком положении горизонтальных штанг 9 производится поворот верхней части 5 платформы относительно нижней части 4 платформы при помощи реверсивного привода поворота 6. По окончании поворота выдвижные вертикальные опорные стойки 12, размещенные на горизонтальных штангах 9 верхней части 5 платформы, опускаются до соприкосновения с опорной поверхностью и эти горизонтальные штанги 9 становятся опорными, а выдвижные вертикальные опорные стойки 12 горизонтальных штанг 9 нижней части 4 платформы поднимаются относительно опорной поверхности на заданную высоту и эти горизонтальные штанги 9 становятся неопорными. Далее производится поворот нижней части 4 платформы вместе с корпусом 1 относительно верхней части 5 платформы при помощи реверсивного привода поворота 6.
Для обеспечения наиболее устойчивого положения в зоне работ шагающий движитель опирается на все восемь выдвижных вертикальных опорных стоек 12, при этом горизонтальные штанги 9 нижней части 4 платформы размещаются перпендикулярно горизонтальным штангам 9 верхней части 5 платформы.
В исходном положении телескопические привода 19, 20, 21 сложены, поворотная стойка 16 повернута в крайнее заднее положение. Для проведения работ схват 23 с помощью поворотной стойки 16, телескопического привода 17 и телескопических приводов 19, 20, 21 перемещается к месту выполнения операции. Необходимое положение схвата 23 относительно объекта манипулирования осуществляется с помощью поворотной стойки 16, телескопического привода 17 и верхнего 19 и нижних 20, 21 телескопических приводов, концы которых связаны унифицированным шарнирным узлом 22, на котором смонтирован схват 23.
Боковая опора для подъемно-транспортной машины
Манипулятор-трипод параллельно-последовательной структуры
Стенд для вытяжки ремней двух передач по схеме замкнутого контура
Автомобильный консольный кран
Домкрат
Стенд для вытяжки ремней двух передач по схеме замкнутого контура
Автомобильный консольный кран
Домкрат
Манипулятор-трипод промышленного назначения
Двухскоростная автоматическая планетарная передача
Самоходная установка с подъемно-мачтовым устройством
Робот-пропольщик с функцией фертигации
Устройство для упаковки данных
Робот-пропольщик
Робот-пропольщик

