Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления летательным аппаратом, в частности к способам управления, обеспечивающим автоматические режимы захода на посадку и выравнивания, и может найти применение в бортовых системах автоматического управления летательными аппаратами.
Известны системы управления, в которых оптимальное управление самолета выполняется в соответствии с алгоритмом прогнозирования промаха точки приземления, в основе которого используется изменение энергии, а также перегрузки и веса самолета (Полезная модель «Система управления летательным аппаратом» №31007 U1). Ошибка прогнозирования промаха индицируется летчику, после чего он принимает решение по перемещению управляющих органов тягой двигателя. В указанной системе управления не учитывается вид ветровых возмущений, а также изменение величины и направления ветра, что оказывает существенное влияние на скорость, определяющую дистанцию приземления и жесткость посадки.
Задачей изобретения является разработка способа управления, обеспечивающего повышение точности посадки и уровня безопасности при посадке самолета в условиях интенсивных ветровых возмущений и турбулентных порывов.
Технический результат - повышение эффективности управления за счет обеспечения возможности автоматической корректировки отклонения руля высоты, а также формирования переменной высоты «сброса тяги» в зависимости от энергетического состояния самолета с целью уменьшения разброса точек касания по дальности и вертикальной скорости, что в конечном итоге обеспечивает требуемую точность посадки.
Заявленный технический результат в предлагаемом способе автоматического управления самолетом при посадке с помощью руля высоты и регулятора тяги двигателей достигается тем, что способ, основанный на использовании сигналов радиовысоты, вертикальной скорости, вертикального ускорения, путевой и приборной скорости, поступающих из системы измерения параметров полета в вычислительную систему управления полетом, в которой обрабатываются поступающие из системы измерения параметров полета сигналы и формируются управляющий сигнал на привод руля высоты и управляющий сигнал на привод регулятора тяги двигателей, характеризуется тем, что для обеспечения касания ВПП основными стойками шасси в заданных диапазонах по дальности и вертикальной скорости в условиях экстремальных возмущений к сформированным управляющим сигналам добавляются корректирующие сигналы для компенсации неблагоприятного влияния ветра, причем компенсацию влияния на привод руля высоты осуществляют за счет использования в вычислительной системе первого блока коррекции, работающего по сигналам скорости изменения разности путевой и приборной скорости, а формирование переменной высоты сброса тяги двигателей осуществляют за счет использования в вычислительной системе второго блока коррекции, работающего по разности текущей и расчетной энергии самолета, где текущую энергию определяют на основе путевой и приборной скоростей, а расчетную энергию определяют на основе заданной приборной скорости, поступающей с пульта управления.
Технический результат для системы автоматического управления самолетом при посадке достигается тем, что система включает пульт задания скорости полета, средства обработки поступающих из системы измерения параметров полета сигналов и формирования управляющих сигналов на привод руля высоты и на привод регулятора тяги двигателя, при этом средства формирования управляющих сигналов выполнены в виде вычислительной системы управления полетом, состоящей из устройства формирования управляющего сигнала на привод руля высоты и устройства формирования управляющего сигнала на привод регулятора тяги двигателей, причем устройство формирования управляющего сигнала на привод руля высоты содержит блок формирования комплексного экспоненциального сигнала, первый и второй сумматоры, программатор, первый дифференциатор, первый и второй блоки коррекции руля высоты, первый и второй нелинейные преобразователи, а устройство формирования управляющего сигнала на привод регулятора тяги двигателей содержит пульт задания скорости, третий сумматор, третий нелинейный преобразователь, блок стабилизации тяги, блок расчета заданной энергии самолета, блок расчета текущей энергии самолета и компаратор, причем в устройстве формирования управляющего сигнала на привод руля высоты блок формирования комплексного экспоненциального сигнала на первом входе использует сигнал от радиовысотомера, на втором входе использует сигнал с датчика вертикальной скорости, а на третьем входе использует сигнал с первого выхода датчика вертикальной перегрузки, выход блока формирования комплексного экспоненциального сигнала соединен с первым входом первого сумматора, который на втором входе использует сигнал с первого выхода датчика вертикальной перегрузки, а на третьем входе использует сигнал с первого выхода датчика путевой скорости через последовательно соединенные по направлению сигнала второй сумматор на его первом входе, первый дифференциатор, первый блок коррекции руля высоты и первый нелинейный преобразователь, на четвертом входе первого сумматора используется сигнал с первого выхода датчика приборной скорости через последовательно соединенные по направлению сигнала второй сумматор на его втором входе, второй блок коррекции руля высоты и второй нелинейный преобразователь, пятый вход первого сумматора соединен с программатором; в устройстве формирования управляющего сигнала на привод регулятора тяги двигателей блок стабилизации тяги своим первым входом связан с первым выходом пульта задания скорости через последовательно соединенные по направлению сигнала третий сумматор на его первом входе и третий нелинейный преобразователь, на втором входе третий сумматор использует сигнал со второго выхода датчика приборной скорости, второй вход блока стабилизации тяги соединен с выходом компаратора, который через блок расчета текущей энергии самолета на первом его входе использует сигнал со второго датчика путевой скорости и на втором его входе использует сигнал с третьего выхода датчика приборной скорости, при этом своим вторым входом компаратор связан с пультом задания скорости на его втором выходе через блок расчета заданной энергии самолета.
В предлагаемом изобретении система автоматического управления в отличие от прототипа анализирует не только величину энергии, но и учитывает вид ветровых возмущений, идентифицируя постоянные сдвиги ветра или турбулентные порывы, а также изменение скорости ветра, без учета информации о весе, получение которой на борту затруднено. Система автоматически вырабатывает управляющие воздействия одновременно и на тягу двигателя, и на руль высоты, корректируя траекторию снижения при выполнении конечного этапа захода на посадку.
Предлагаемый способ, реализуемый в системе автоматического управления, обеспечивает управление на конечном этапе захода на посадку - выравнивании, определяющем характеристики касания ВПП (дальность касания, вертикальная скорость, угол тангажа и др.).
Управление на этапе выравнивания, как правило, осуществляется по экспоненциальному закону, формируемому как линейная комбинация геометрической высоты полета и ее производной, с привлечением дополнительной информации о параметрах движения центра масс самолета и его положения относительно расчетной точки приземления.
При выполнении автоматического выравнивания производится уменьшение вертикальной скорости объекта от величины, с которой самолет снижается по глиссаде, до вертикальной скорости, обеспечивающей безопасный контакт шасси с поверхностью ВПП.
Заданное значение вертикального ускорения  формируется в функции отклонения от экспоненциальной траектории выравнивания, задаваемой соотношением между высотой полета над поверхностью ВПП и вертикальной скоростью снижения
формируется в функции отклонения от экспоненциальной траектории выравнивания, задаваемой соотношением между высотой полета над поверхностью ВПП и вертикальной скоростью снижения

где ΔНэксп - экспоненциальная траектория выравнивания;
HPB - высота нижней точки шасси над поверхностью ВПП по показаниям радиовысотомера;
HAC - положение асимптоты экспоненты, расположенной ниже уровня ВПП, для получения заданной вертикальной скорости касания;
KVy - коэффициент усиления;
 - вертикальная скорость;
- вертикальная скорость;
FVy - ограничение сигнала вертикальной скорости
, введенное в систему с целью сглаживания скачков при дифференцировании высоты полета в случае наличия нерегулярности рельефа перед ВПП.
Известно, что на характеристики касания в большой степени влияют ветровые возмущения. В зависимости от величины ветра изменяются скорость полета, значения вертикальной скорости снижения, углы тангажа, что непосредственно определяет безопасность посадки. Поэтому очень важной проблемой является компенсация ветровых возмущений.
Компенсация ветровых возмущений выполнена и направлена на улучшение характеристик касания. Дополнительные корректирующие сигналы в зависимости от действующих ветровых возмущений предусмотрены как на руль высоты, так и на тягу двигателя и реализованы на основе:
- идентификации ветровых сдвигов и порывов ветра и формирования дополнительных управляющих сигналов в руль высоты;
- выбора высоты «сброса газа» в зависимости от уровня энергии самолета в текущий момент времени для сокращения дистанции касания.
Для формирования компенсационных управляющих сигналов на руль высоты при действии постоянного и турбулентного ветра в суммарный сигнал замкнутого и разомкнутого контура алгоритма выравнивания добавляется дополнительный сигнал компенсации постоянной составляющей и порывов попутного ветра

где  - сигнал компенсации постоянной составляющей и порывов попутного ветра;
- сигнал компенсации постоянной составляющей и порывов попутного ветра;
- заданное значение вертикального ускорения;
Uпр - программный сигнал, формирующий программную траекторию выравнивания в зависимости от высоты по радиовысотомеру;
Uw пор - компенсационная составляющая ветровых возмущений в виде порывов турбулентного ветра;
Uw vetr - компенсационная составляющая для формирования управляющих сигналов на руль высоты и компенсации постоянных сдвигов ветра, которая вычисляется следующим образом:
где ΔV - разница между приборной Vпр и путевой Vпут скоростью
(ΔV=Vпр-Vпут);
F1 - нелинейная функция, зависящая от направления и скорости постоянного ветра.
Составляющая Uw пор предназначена для формирования управляющих сигналов на руль высоты для компенсации турбулентных порывов ветра.
Uw пор может быть получена фильтрацией разности сигналов приборной и путевой скорости изодромным звеном с постоянной времени Тф
где Р - оператор Лапласа;
ΔV - разница между приборной Vпр и путевой Vпут скоростью;
F1 - нелинейная функция, зависящая от направления и скорости постоянного ветра;
F2 - нелинейная функция, имеющая ограничение, зону нечувствительности, определяющую величину порывов, компенсируемых рулем высоты, и несимметрию в отношении компенсаций попутных или встречных порывов.
В общем случае вид нелинейных функций F1 и F2 определяется типом самолета, его аэродинамическими свойствами - «летучестью» или, наоборот, склонностью к короткой посадке, а также коэффициентами, определяющими взаимодействие с поверхностью земли (коэффициентами, определяющими взаимодействие с поверхностью земли (коэффициентами влияния подстилающей поверхности)).
Для сокращения дистанций и исключения больших разбросов по дальности на посадке при действии ветра и турбулентных порывов формируется торможение на конечном участке полета перед касанием ВПП по команде сброса газа двигательной установки на переменной высоте исходя из энергетических возможностей самолета.
Перевод сектора газа в положение «малый газ» система автоматического управления выполняет, как правило, на фиксированной высоте Нсбр~3 м.
Введение переменной высоты сброса тяги двигателей в предложенном способе управления связано с необходимостью обеспечения одинакового изменения скорости полета на участке выравнивания, что необходимо для уменьшения разброса точки касания по дальности.
Для определения энергетических возможностей самолета определим кинетическую энергию на текущий момент времени
Поскольку летчик выставляет заданную скорость Vпр зад по руководству по летной эксплуатации в зависимости от веса самолета, то можно принять, что
тогда

где к - эмпирический коэффициент;
Vпр зад - заданное с пульта значение приборной скорости (выставляется летчиком), аналог характеристики веса;
 - квадрат значения текущей путевой скорости с учетом ветра.
- квадрат значения текущей путевой скорости с учетом ветра.
Выполним разложение по Лагранжу
где Vпр зад1, Vпр зад2, Vпр зад3 - опорные значения приборной заданной скорости соответственно для минимального, среднего и максимального весов;
Ек1, Ек2, Ек3 - рассчитанные (по соотношению 7) значения энергии соответственно для минимального, среднего и максимального весов.
В зависимости от величины энергии формируется команда на сброс газа при торможении на посадке при одновременном выполнении следующих условий:
Ек>Ек лагр и
|Vy|<|Vy1|,
где Ек - текущее значение энергии;
Vy - текущее значение вертикальной скорости;
Vy1 - минимальное значение для формирования команды сброса газа, определяемое по результатам математического моделирования.
Предлагаемые компенсации ветровых возмущений можно реализовать в системе автоматической посадки в виде устройств, вырабатывающих дополнительные сигналы управления на руль высоты и в канал тяги управления рычагами двигателя.
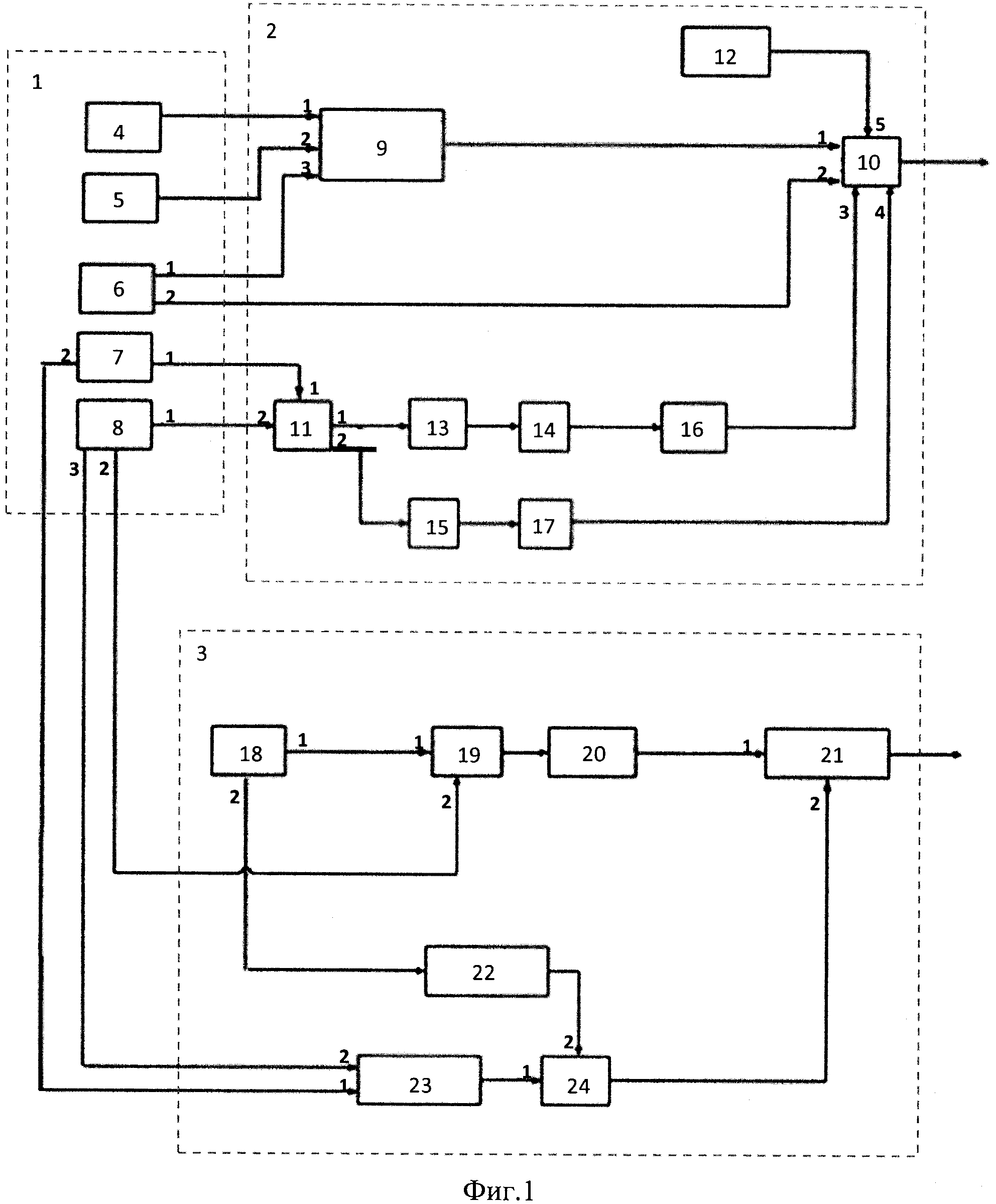
Сущность предлагаемого решения поясняется представленной на фиг. 1 блок-схемой системы автоматического управления.
Предлагаемая система автоматического управления представляет собой вычислительную систему, состоящую, согласно способу управления, из двух функциональных частей - устройства формирования управляющего сигнала на привод руля высоты (2) и устройства формирования управляющего сигнала на привод регулятора тяги двигателей (3) и использующую известную систему измерения параметров полета (1), включающую радиовысотомер (4), датчик вертикальной скорости (5), датчик вертикальной перегрузки (6), датчик путевой скорости (7) и датчик приборной скорости (8). Устройство формирования управляющего сигнала (2) содержит блок формирования комплексного экспоненциального сигнала (9), сумматоры (10) и (11), программатор (12), дифференциатор (13), блоки коррекции руля высоты (14), (15) и нелинейные преобразователи (16), (17). Устройство формирования управляющего сигнала (3) содержит пульт задания скорости (18), сумматор (19), нелинейный преобразователь (20), блок стабилизации тяги (21), блок расчета заданной энергии самолета (22), блок расчета текущей энергии самолета (23) и компаратор (24).
Система управления, с помощью которой реализуется заявляемый способ, работает следующим образом.
В устройстве формирования управляющего сигнала на привод руля высоты (2) на входы блока формирования комплексного экспоненциального сигнала (9) поступают сигналы от радиовысотомера (4), датчика вертикальной скорости (5) и датчика вертикальной перегрузки (6) следующим образом: на первый вход - сигнал высоты самолета относительно поверхности земли от радиовысотомера (4), на второй вход - сигнал вертикальной скорости полета с датчика вертикальной скорости (5), а на третий вход - сигнал перегрузки с первого выхода датчика вертикальной перегрузки (6). С выхода блока формирования комплексного экспоненциального сигнала (9) сигнал поступает на первый вход сумматора (10), на второй его вход поступает сигнал перегрузки со второго выхода датчика вертикальной перегрузки (6). Сигнал с первого выхода датчика путевой скорости (7) и сигнал с первого выхода датчика приборной скорости (8) поступают соответственно на первый и второй входы сумматора (11), а затем на дифференциатор (13), после которого сигнал усиливается в блоке коррекции (14), ограничивается в нелинейном преобразователе (16), с выхода которого первый корректирующий сигнал поступает на третий вход сумматора (10), на четвертый вход поступает второй корректирующий сигнал с выхода нелинейного преобразователя (17), на вход которого поступает сигнал со второго выхода сумматора (11), усиленный в блоке коррекции (15). На основе четырех сигналов, поступающих в сумматор (10), вырабатывается выходной сигнал устройства управления рулем высоты. Программирование сумматора осуществляют посредством программатора (12), соединенного с пятым входом сумматора (10).
В устройстве формирования управляющего сигнала на привод регулятора тяги двигателей (3) с первого выхода пульта задания скорости (18) заданная скорость поступает на первый вход сумматора (19), на второй вход которого поступает сигнал текущей приборной скорости со второго выхода датчика (7). Сигнал с выхода сумматора (19) через ограничитель (20) поступает на первый вход блока стабилизации тяги (21). На второй его вход поступает второй корректирующий сигнал с компаратора (24), сформированный на основе сравнения сигналов, один из которых поступает из блока расчета заданной энергии (22), на вход которого поступает сигнал со второго выхода пульта задания скорости (18), а другой сигнал - из блока расчета текущей энергии (23), на первый вход которого поступает сигнал со второго выхода датчика путевой скорости (7), а на второй - сигнал с датчика приборной скорости (8). На основе сигналов, поступающих с компаратора (24) на первый и второй входы блока стабилизации тяги (21), вырабатывается сигнал управления тягой двигателей.
Способ получения белковой биомассы базидиального гриба pleurotus pulmonarius
Способ повышения точности начальной выставки бесплатформенной инерциальной системы
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Штамм candida albicans var. stellatoidea для получения диагностического аллергена
Кольцевой резонатор лазерного гироскопа
Система управления самолетом
Способ управления самолетом
Способ управления скоростью полёта самолёта с учетом стабилизации скорости
Способ электрического стимулирования мяса птицы перед замораживанием

