Результат интеллектуальной деятельности: НАВОДЯЩЕЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ БОКОВЫХ ОТРАЖАТЕЛЕЙ
Вид РИД
Изобретение
Изобретение относится к области ядерных технологий и может быть использовано для извлечения боковых отражателей из ядерного реактора с жидкометаллическим теплоносителем.
При выгрузке боковых отражателей из ядерного реактора с жидкометаллическим теплоносителем необходимо осуществить наведение захвата контейнера для боковых отражателей на головку («грибок») извлекаемого бокового отражателя, сцепление захвата с «грибком», страгивание с места («подрыв») бокового отражателя и его подъем в контейнер.
Специфика извлечения боковых отражателей обусловлена их месторасположением в моноблоке реакторном (МБР) при затесненной компоновке элементов и конструктивной особенностью самих боковых отражателей, т.к. у них отсутствует направляющая для захвата. Например, при выгрузке отработавшей тепловыделяющей сборки (ОТВС) в качестве направляющей выступает чехол системы управления и защиты (СУЗ). Поскольку чехлы СУЗ, выступающие из ОТВС в реакторе, имеют большую высоту, то выход на заданную координату бокового отражателя возможно осуществить лишь выше чехлов СУЗ, что ведет к большой величине вертикального перемещения захвата и направляющего элемента устройства. В связи с тем, что боковые отражатели расположены в ограниченном пространстве между ОТВС, чехлами СУЗ и стенкой корпуса МБР, требуется обеспечить значительный зазор между наружной поверхностью захвата, чехлами СУЗ и стенкой корпуса МБР. Кроме того, в связи с малыми зазорами между боковыми отражателями, ОТВС и стенкой корпуса МБР при извлечении деформированных (в частности, изогнутых) боковых отражателей для их подъема может возникнуть необходимость приложения больших (превышающих допустимые для троса лебедки контейнера) усилий при прохождении активной зоны реактора.
Известно наводящее устройство (патент RU №2161588 С2, В66С 1/66, опубл. 10.01.2001) для совмещения одного изделия с другим при перегрузке, содержащее основание и направляющую трубу для направления перемещения захвата, установленную в малую поворотную плиту, большую и малую поворотные плиты со смещенными осями вращения и приводами, обеспечивающими выход на заданную координату в зоне обслуживания, и винтовой домкрат.
Однако известное наводящее устройство не допускает больших величин вертикального перемещения направляющего элемента, тем самым не обеспечивает проход захвата через выступающие из ОТВС чехлы СУЗ и не позволяет извлекать боковые отражатели в силу ограниченного пространства между чехлами СУЗ и стенкой корпуса МБР.
Задачей, решаемой изобретением, является разработка устройства для наведения захвата контейнера для боковых отражателей на «грибок» бокового отражателя, подлежащего извлечению, прохода захвата между чехлами СУЗ и стенкой реактора, «подрыва» и извлечения бокового отражателя в контейнер при значительной высоте перемещения с целью повышения надежности оборудования и улучшения безопасности работы.
При использовании предлагаемого изобретения могут быть получены, в частности, следующие технические результаты:
- обеспечение возможности опускания наводящей колонны телескопа на большую глубину;
- обеспечение возможности прохода захвата между чехлами СУЗ и стенкой корпуса МБР;
- обеспечение наведения захвата контейнера на «грибок» бокового отражателя;
- исключение необходимости в отдельном приводе для «подрыва»;
- обеспечение возможности перемещения захвата с усилием, превышающим допустимое значение для троса лебедки контейнера для боковых отражателей;
- предотвращение возможности падения захвата с боковым отражателем в случае обрыва троса лебедки контейнера;
- обеспечение самоустановки гайки привода перемещения направляющей трубы телескопа;
- устранение изгибающей нагрузки на винт привода перемещения направляющей трубы телескопа;
- исключение возможности повреждения захвата и направляющей колонны телескопа при «подрыве» бокового отражателя;
- обеспечение точного наведения.
Поставленная задача решается тем, что наводящее устройство для извлечения боковых отражателей содержит основание и поворотную плиту с приводом, обеспечивающим выход на заданную координату, телескоп и механизм перемещения телескопа. Причем телескоп, состоящий из корпуса, направляющей колонны телескопа и привода перемещения направляющей колонны телескопа, установлен на тележке механизма перемещения телескопа. Привод механизма перемещения телескопа выполнен в виде винтового механизма, винт которого закреплен на поворотной плите с возможностью вращения, а гайка с возможностью линейного перемещения по винту закреплена на тележке механизма перемещения телескопа и обеспечивает перемещение тележки с закрепленным на ней телескопом относительно поворотной плиты. Притом направляющая колонна телескопа предназначена для направления перемещения захвата контейнера, выполненного с возможностью прохода между чехлами СУЗ и стенкой корпуса МБР и стыковки с «грибком» бокового отражателя, и установлена в корпусе телескопа, связанного через механизм перемещения телескопа с поворотной плитой. Механизм перемещения телескопа предназначен для обеспечения горизонтального перемещения телескопа. Привод направляющей колонны телескопа предназначен для обеспечения вертикального перемещения телескопа. При этом и привод направляющей колонны телескопа выполнен в виде винтового механизма, винт которого установлен эксцентрично относительно корпуса телескопа с возможностью вращения, а гайка - с возможностью линейного перемещения по винту и возможностью самоустановки относительно направляющей колонны телескопа, что обеспечивает возможность ее вертикального перемещения с усилием, превышающим допустимое для троса лебедки контейнера, как минимум, на высоту активной зоны реактора. Кроме того, направляющая колонна телескопа снабжена кронштейном для сцепления с захватом.
Предпочтительно в корпусе телескопа установить ролики для перемещения направляющей колонны телескопа.
Желательно кронштейн снабдить рычагом, предотвращающим расцепление направляющей колонны телескопа и захвата.
Предпочтительно гайку привода перемещения направляющей колонны телескопа установить в корпусе кронштейна при помощи конического гнезда и сферической опоры.
Желательно гайку привода перемещения направляющей колонны телескопа снабдить лысками для предотвращения ее вращения относительно корпуса телескопа.
Целесообразно телескоп снабдить, по меньшей мере, одним упором, позволяющим ограничивать перемещение направляющей колонны телескопа вверх.
Снабжение телескопа приводом перемещения направляющей колонны телескопа значительно увеличивает за счет длины винта вертикальное перемещение направляющей колонны телескопа, что позволяет опускать телескоп на большую глубину для прохода захвата между чехлами СУЗ и стенкой корпуса МБР, обеспечивать точное наведение захвата на «грибок» бокового отражателя, а также исключает необходимость в отдельном приводе для «подрыва» бокового отражателя из соответствующего гнезда.
Установка в телескопе направляющей колонны телескопа с возможностью ее вертикального перемещения с некоторым опережением относительно перемещения захвата лебедкой контейнера для боковых отражателей обеспечивает перемещение с усилием, превышающим допустимое для троса лебедки, и исключает падение захвата с боковым отражателем в случае обрыва троса лебедки.
Снабжение кронштейна направляющей колонны телескопа рычагом предупреждает падение захвата с боковым отражателем в случае обрыва троса лебедки контейнера для боковых отражателей, что повышает безопасность работы.
Устранение изгибающей нагрузки на винт привода перемещения направляющей колонны телескопа обеспечивается тем, что гайка привода перемещения направляющей колонны телескопа выполнена с возможностью самоустановки, что повышает надежность механизма.
Самоустановка гайки привода перемещения направляющей колонны телескопа обеспечивается тем, что гайка винтового механизма установлена в корпусе при помощи конического гнезда и сферической опоры с возможностью предотвращения ее вращения относительно корпуса.
Исключение возможности повреждения самого захвата и направляющей колонны телескопа при «подрыве» бокового отражателя обеспечивается снабжением нижней части направляющей колонны телескопа кронштейном для сцепления с захватом, что повышает надежность оборудования и улучшает безопасность работ.
Снабжение направляющей колонны телескопа кронштейном для сцепления с захватом позволяет осуществить точное наведение захвата непосредственно на извлекаемый боковой отражатель, совмещая ось захвата с осью «грибка» извлекаемого бокового отражателя, и производить извлечение боковых отражателей с обеспечением их защиты и защиты ОТВС еще и от механических повреждений.
Снабжение кронштейна телескопа рычагом обеспечивает невозможность самопроизвольного расцепления захвата контейнера.
Оснащение наводящего устройства для извлечения боковых отражателей механизмом перемещения телескопа позволяет осуществить беспрепятственное перемещение захвата или захвата, сцепленного с боковым отражателем, в контейнер для боковых отражателей.
Заявляемое изобретение поясняется чертежами, представленными на фиг. 1-7.
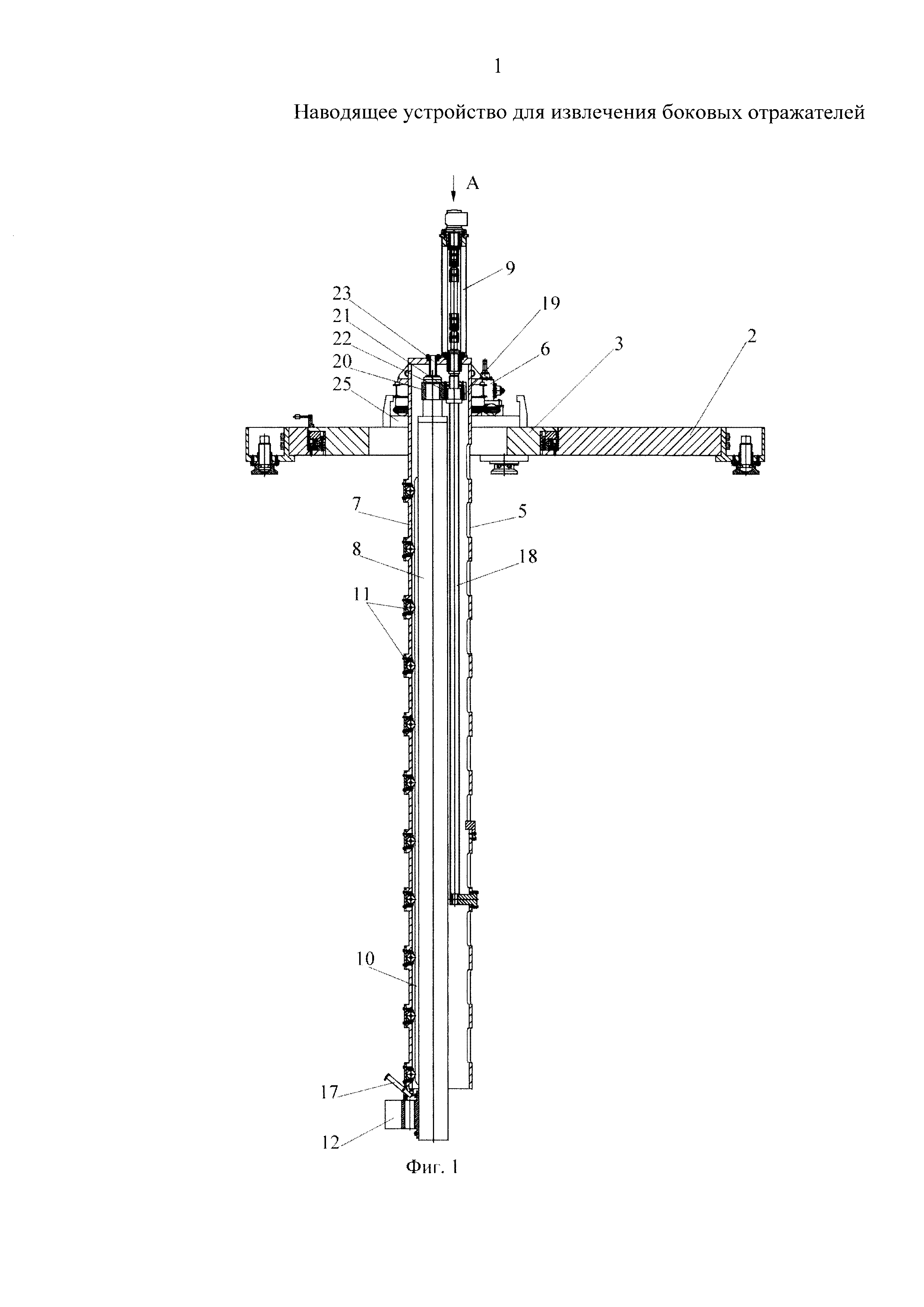
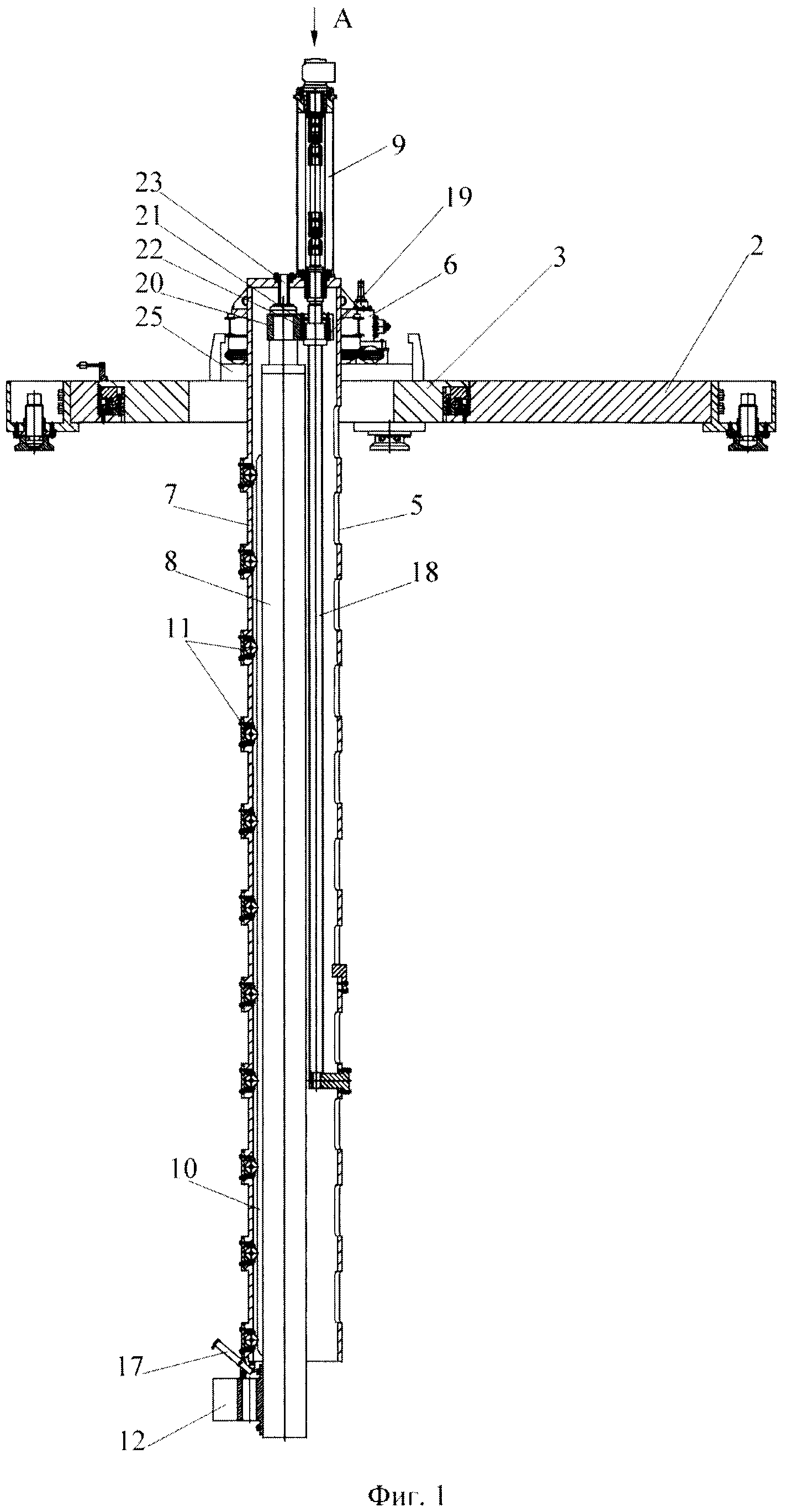
фиг. 1 - общий вид наводящего устройства;
фиг. 2 - вид А (вид сверху);
фиг. 3 - общий вид механизма перемещения телескопа;
фиг. 4 - общий вид наводящего устройства в исходном положении;
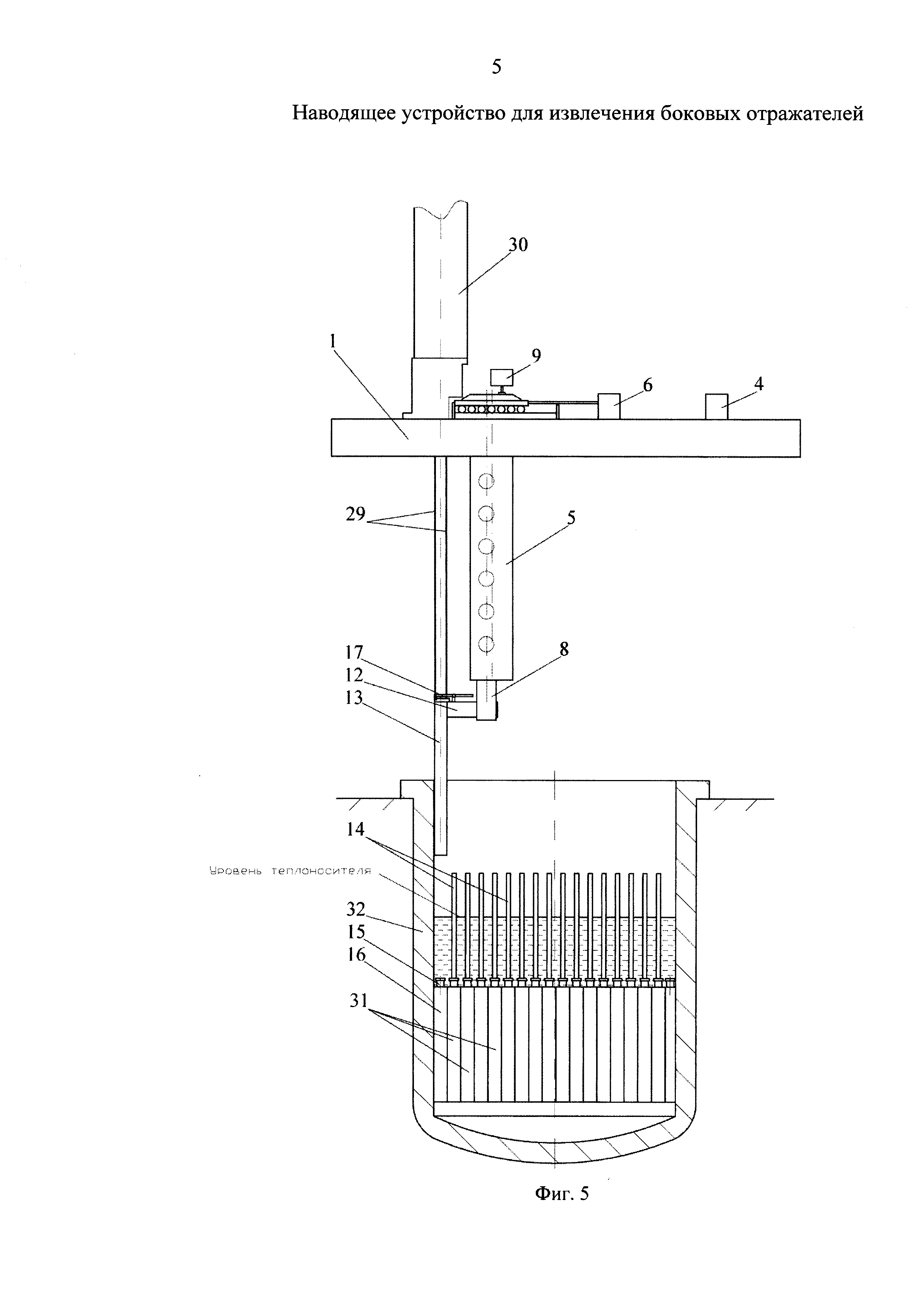
фиг. 5 - общий вид наводящего устройства в момент сцепления захвата с наводящим устройством;
фиг. 6 - общий вид наводящего устройства в момент сцепления захвата с подлежащим извлечению боковым отражателем;
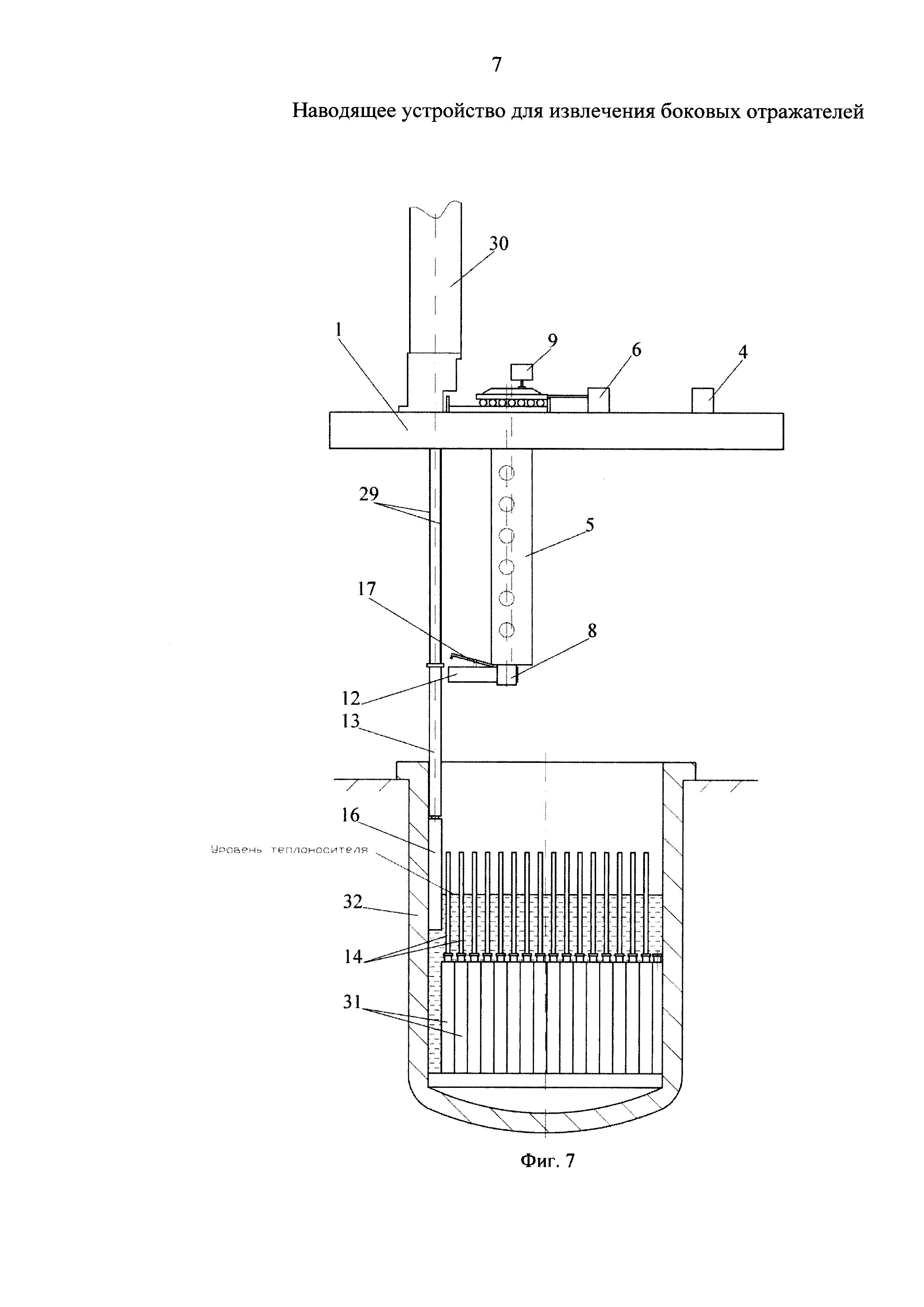
фиг. 7 - общий вид наводящего устройства в момент расцепления захвата с боковым отражателем и наводящего устройства.
Наводящее устройство 1 для извлечения боковых отражателей содержит (фиг. 1 и 2): основание 2, поворотную плиту 3 с приводом 4, телескоп 5 и механизм 6 перемещения телескопа.
Телескоп 5 (фиг. 1) содержит корпус 7 телескопа, направляющую колонну 8 телескопа и привод 9 перемещения направляющей колонны телескопа. Направляющая колонна 8 телескопа установлена в корпусе 7 телескопа и снабжена направляющими 10. Корпус 7 телескопа снабжен роликами 11 для перемещения по ним направляющей колонны 8 телескопа. В нижней части направляющей колонны 8 телескопа закреплен кронштейн 12 (фиг. 1, 4-7), предназначенный для сцепления наводящего устройства 1 для извлечения боковых отражателей с захватом 13. Кронштейн 12 выполнен с возможностью прохода через чехлы СУЗ 14 и обеспечивает сцепление захвата 13 с «грибком» 15 бокового отражателя 16 (фиг. 4), исключая возможность повреждения захвата 13 при «подрыве» бокового отражателя 16. Кронштейн 12 снабжен рычагом 17 (фиг. 1 и 4), обеспечивающим невозможность самопроизвольного расцепления захвата 13 и наводящего устройства 1 для извлечения боковых отражателей.
Привод 9 перемещения направляющей колонны телескопа (фиг. 1) выполнен в виде винтового механизма, состоящего из винта 18, установленного эксцентрично относительно корпуса 7 телескопа с возможностью вращения, и гайки 19, установленной с возможностью линейного перемещения по винту 18 и возможностью самоустановки относительно направляющей колонны 8 телескопа. Гайка 19 установлена в корпусе кронштейна 20 при помощи конического гнезда 21 и сферической опоры 22. Для предотвращения вращения гайки 19 относительно корпуса кронштейна 20 она снабжена лысками (не показаны). Возможность самоустановки гайки 19 привода 9 перемещения направляющей колонны телескопа устраняет изгибающую нагрузку на винт 18, повышая надежность всего механизма.
В корпусе 7 телескопа расположен упор 23, который ограничивает перемещение направляющей колонны 8 телескопа.
Механизм 6 перемещения телескопа (фиг. 1 и 3) состоит из тележки 24 (фиг. 2), перемещающейся по направляющим качения 25 (фиг. 1 и 3), установленным на поворотной плите 2, и привода 26 механизма перемещения телескопа (фиг. 3), выполненного в виде винтового механизма, состоящего из винта 27, установленного на поворотной плите 2 с возможностью вращения, гайки 28, установленной с возможностью линейного перемещения по винту 27 и возможностью самоустановки относительно тележки 24.
Захват 13 закреплен на тросах 29 лебедки (не показана) контейнера 30 для боковых отражателей.
Боковые отражатели 16 расположены в ограниченном пространстве между ОТВС 31, чехлами СУЗ 14 и стенкой корпуса 32 МБР.
Работа наводящего устройства 1 для извлечения боковых отражателей происходит следующим образом.
В исходном положении направляющая колонна 8 телескопа втянута в корпус 7 телескопа и расположена выше чехлов СУЗ 14 (фиг. 4). Рычаг 17 находится в положении под углом примерно 45° относительно горизонтальной плоскости кронштейна 12.
При помощи механизма 6 перемещения телескопа телескоп 5 устанавливают в крайнее правое положении (ближе к оси поворотной плиты 2). На наводящее устройство 1 для извлечения боковых отражателей устанавливают контейнер 30 для боковых отражателей. Приводом 4 (фиг. 2) поворотной плиты 2 совмещают ось контейнера 30 для боковых отражателей с осью подлежащего извлечению бокового отражателя 16, после чего, при помощи лебедки контейнера (не показана) и тросов 29 производят опускание захвата 13 до уровня возможности совмещения его с кронштейном 12 направляющей колонны 8 телескопа. Остановка происходит по сигналу датчика перемещения (не показан). Механизмом 6 перемещения телескопа осуществляют перемещение телескопа 5 в крайнее левое положение до стыковки захвата 13 с кронштейном 12 направляющей колонны 8 телескопа. При помощи привода 9 направляющей колонны телескопа направляющую колонну 8 телескопа выдвигают из корпуса 7 телескопа. По мере выдвижения направляющей колонны 8 телескопа рычаг 17 поворачивается в горизонтальное положение, надежно фиксируя захват 13 относительно кронштейна 12 направляющей колонны 8 телескопа. Далее, уже с захватом 13 перемещают направляющую колонну 8 телескопа вниз. При помощи лебедки контейнера 30 для боковых отражателей разматывают тросы 29, на которых закреплен захват 13, и обеспечивают беспрепятственное перемещение направляющей колонны 8 телескопа с захватом 13 в МБР. Остановка привода 9 перемещения направляющей колонны телескопа осуществляется по сигналу датчика перемещения (не показан). При этом значительное вертикальное перемещение направляющей колонны 8 телескопа за счет длины винта 18 позволяет опускать захват 13 на большую глубину для прохода между чехлами СУЗ 14 и стенкой корпуса 32 МБР, и этим обеспечивают наведение его на «грибок» 15 бокового отражателя 16. Осуществляют стыковку захвата 13 с «грибком» 15 бокового отражателя 16.
Затем производят подъем направляющей колонны 8 телескопа с зафиксированными на ней захватом 13 и боковым отражателем 16. Перемещение направляющей колонны 8 телескопа вверх осуществляют при помощи привода 9 перемещения направляющей колонны телескопа, обеспечивая тем самым «подрыв» бокового отражателя 16. Втягивание направляющей колонны 8 телескопа ограничено упором 23. В процессе подъема захвата 13 с зафиксированным на нем боковым отражателем 16 осуществляют намотку тросов 29 на барабан лебедки (не показаны) контейнера 30 для боковых отражателей, предотвращая провисание тросов 29. В крайнем верхнем положении направляющей колонны 8 телескопа рычаг 17 поворачивается на угол приблизительно 45°, обеспечивая возможность расстыковки захвата 13 и колонны направляющей 8 телескопа. При помощи привода 26 механизма перемещения телескопа телескоп 5 перемещают в сторону оси поворотной плиты 2, расцепляя захват 13 с зафиксированным на нем боковым отражателем 16 и кронштейн 12 направляющей колонны 8 телескопа. Захват 13 с зафиксированным на нем боковым отражателем 16 на тросах 29 поднимается при помощи лебедки в контейнер 30 для боковых отражателей.
Таким образом, заявленная конструкция наводящего устройства для извлечения боковых отражателей позволяет при значительной высоте перемещения быстро, точно и технологично осуществить наведение захвата контейнера для боковых отражателей на «грибок» бокового отражателя, подлежащего извлечению, проход захвата между чехлами СУЗ и стенкой корпуса МБР, «подрыв» и извлечение бокового отражателя в контейнер, что обеспечивает повышение надежности оборудования и улучшение безопасности работы.
Способ и система регулирования концентрации кислорода и водорода в реакторной установке и ядерная реакторная установка
Устройство и способ измерения величины артериального давления человека
Рабочий источник нейтронов
Датчик водорода в газовых средах
Способ определения рабочих качеств служебных собак
Агропромышленный агрегат
Способ изготовления полуфабрикатов иммуноглобулиновых и альбуминовых биопрепаратов из боенской, трупной крови животных, абортной и плацентарной крови человека
Устройство страховочное для транспортировки отработавших гамма-камерных тепловыделяющих сборок

