Результат интеллектуальной деятельности: СПОСОБ АВТОНОМНОЙ ЛОКАЛИЗАЦИИ САМОХОДНОГО МОТОРИЗОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Настоящее изобретение относится к способу автономной локализации самоходного моторизованного транспортного средства внутри известной окружающей среды с применением по меньшей мере одного датчика.
Подобные способы известны в уровне техники в различных формах выполнения. Они служат для того, чтобы определять положение самоходного моторизованного транспортного средства, посредством чего возможна самоходная навигация транспортного средства.
Подобные способы локализации используются, например, в области складской логистики. Для транспортировки грузов там все больше применяются самоходные моторизованные транспортные средства для обеспечения высокой степени автоматизации.
Имеются способы локализации, которые применяют так называемые искусственные ориентиры в форме дополнительных установок, таких как отражающие маркерные знаки, направляющие тросы, радиостанции и т.п. Эти искусственные ориентиры в известной среде, внутри которой должно локализоваться транспортное средство, размещаются таким образом, что, с одной стороны, имеется достаточно ориентиров для надежной локализации, а с другой стороны, однако, затраты на установку, связанные с позиционированием ориентиров, являются по возможности малыми. В качестве датчика для регистрации искусственных ориентиров может служить, например, смонтированный на транспортном средстве датчик дистанционного измерения, например, в форме лазерного сканера, который с применением двигателя датчика равномерно поворачивается туда и обратно вокруг оси поворота.
Способы автономной локализации, напротив, не применяют искусственных ориентиров, а применяют естественные ориентиры, как, например, существующие в окружающей среде геометрические структурные элементы в форме труб, балок, колонн и т.п. Таким способом без какого-либо вмешательства в окружающую среду достигается высокая степень гибкости при высокоточной локализации. Это имеет особое преимущество, состоящее в том, что маршруты транспортного средства могут изменяться без больших временных и финансовых затрат. В качестве датчика здесь также может служить смонтированный на транспортном средстве лазерный сканер, который с применением двигателя датчика равномерно поворачивается туда и обратно вокруг оси поворота.
Подобные способы автономной локализации функционируют хорошо, если имеется достаточно информации об окружающей среде в форме естественных ориентиров, которые могут регистрироваться соответствующим датчиком. В общем случае, на практике часто происходит так, что некоторые области окружающей среды имеют лишь очень мало естественных ориентиров, которые могут служить для локализации транспортного средства. Поэтому в таких областях окружающей среды особое значение приобретают действительная регистрация и использование малой имеющейся информации. Предписанная регистрация ориентиров с помощью используемых датчиков может в любом случае гарантироваться только при соответственно высокой плотности измеренных данных, для чего требуется определенная продолжительность времени. Соответственно, вся окружающая среда транспортного средства может регистрироваться не в реальном времени, а с соответствующим смещением во времени. Это может привести к тому, что некоторые области окружающей среды, ввиду движения транспортного средства, вообще не будут зарегистрированы или будут зарегистрированы по меньшей мере в недостаточной степени. Иными словами, может произойти прохождение мимо ориентира без его регистрации. В областях, где имеется достаточно ориентиров, это обычно не создает проблем. Напротив, в областях окружающей среды, в которых имеется лишь мало ориентиров, пропуск регистрации ориентира может привести к тому, что транспортное средство более не может быть локализовано, что приводит к остановке транспортного средства.
Исходя из этого уровня техники, задачей настоящего изобретения является создание способа вышеуказанного типа, при котором гарантируется, что ориентиры и в критических областях окружающей среды, где имеется лишь немного ориентиров, надежным образом регистрируются, чтобы таким образом предотвратить остановку транспортного средства.
Для решения этой задачи предложенное изобретение создает способ автономной локализации самоходного моторизованного транспортного средства внутри известной окружающей среды с применением размещенного на транспортном средстве датчика измерения дальности, направление измерения которого или плоскость измерения которого за счет приведения в действие по меньшей мере одного двигателя датчика является изменяемой, причем способ имеет следующие этапы: создание географической карты окружающей среды на основе естественных ориентиров; установление предопределенного маршрута, вдоль которого должно перемещаться транспортное средство; определение тех ориентиров, которые вдоль предопределенного маршрута должны служить в качестве вспомогательного средства локализации; сканирование окружающей среды в различные моменты времени с применением датчика для регистрации определенных заранее ориентиров, в то время как транспортное средство перемещается вдоль предопределенного маршрута; и локализация транспортного средства путем сравнения зарегистрированных ориентиров с помеченными на географической карте ориентирами; причем скорость и/или направление поворота двигателя датчика по меньшей мере в областях окружающей среды с лишь малым количеством заранее определенных ориентиров таким образом управляется(ются), что датчик активно направляется на эти ориентиры, чтобы гарантировать их регистрацию. Иными словами, датчик по меньшей мере в областях окружающей среды с лишь небольшим количеством ориентиров активно направляется и наводится на эти ориентиры за счет того, что скорость и/или направление привода датчика соответственно изменяются. Таким способом гарантируется, что регистрация ориентиров в критических областях окружающей среды гарантируется, из-за чего транспортное средство не может потерять свое текущее положение. Соответственно, это не приводит ни к остановке транспортного средства, ни к прерыванию навигации транспортного средства.
Согласно варианту осуществления предложенного изобретения в качестве датчика применяется измеряющий в одной плоскости лазерный сканер, плоскость измерений которого может поворачиваться с помощью двигателя датчика. За счет комбинации движения двигателя и плоскости лазера пространство измерения соответственно регистрируется трехмерным образом.
В качестве альтернативы, в качестве датчика может применяться однолучевой лазер, который закреплен на двигателе с возможностью поворота вокруг двух осей поворота. Альтернативно, его луч может также отклоняться с помощью зеркала, размещенного на двигателе с возможностью поворота вокруг двух осей поворота.
Предпочтительным образом, при локализации транспортного средства учитывается скорость транспортного средства, регистрируемая посредством другого датчика. При учете текущей скорости транспортного средства, с одной стороны, скорость, с которой должен приводиться в действие двигатель датчика, чтобы гарантировать надежную регистрацию конкретных ориентиров, определяется очень точно. С другой стороны, сканирования, выполненные в различные моменты времени, через скорость транспортного средства могут логически связываться друг с другом.
Согласно одному варианту осуществления, скоростью и/или направлением поворота двигателя датчика управляют таким образом, чтобы датчик по меньшей мере ориентиры в областях окружающей среды с лишь небольшим количеством заранее определенных ориентиров сканировал интенсивнее, чем другие ориентиры, в частности, в течение более длительного временного интервала. Посредством повышения плотности измеренных данных ожидаемое значение неопределенности положения транспортного средства может минимизироваться, так как ошибка структурного элемента или естественного ориентира при увеличении количества измерений уменьшается.
Области, в которых никакие информации не могут быть получены, напротив, предпочтительным образом сканируются с меньшей интенсивностью или вообще не рассматриваются. Тем самым количество ненужных измерений существенным образом снижается, благодаря чему упрощается обработка зарегистрированных данных измерений, так как за счет рассмотрения исключительно релевантных областей объем вычислений для локализации транспортного средства снижается.
Другие признаки и преимущества предложенного изобретения поясняются на основе последующего описания предпочтительной формы выполнения соответствующего изобретению способа автономной локализации со ссылками на приложенные чертежи, на которых показано следующее:
Фиг.1 - схематичный вид сверху на подлежащее локализации моторизованное транспортное средство;
Фиг.2-4 - схематичные виды сверху, с помощью которых поясняются способ функционирования известного способа автономной локализации и связанные с ним недостатки; и
Фиг.5-8 - схематичные виды сверху, с помощью которых поясняются способ функционирования способа автономной локализации согласно форме выполнения предложенного изобретения и связанные с ним преимущества.
Одинаковые ссылочные позиции относятся в последующем описании к одинаковым или подобным образом выполненным компонентам.
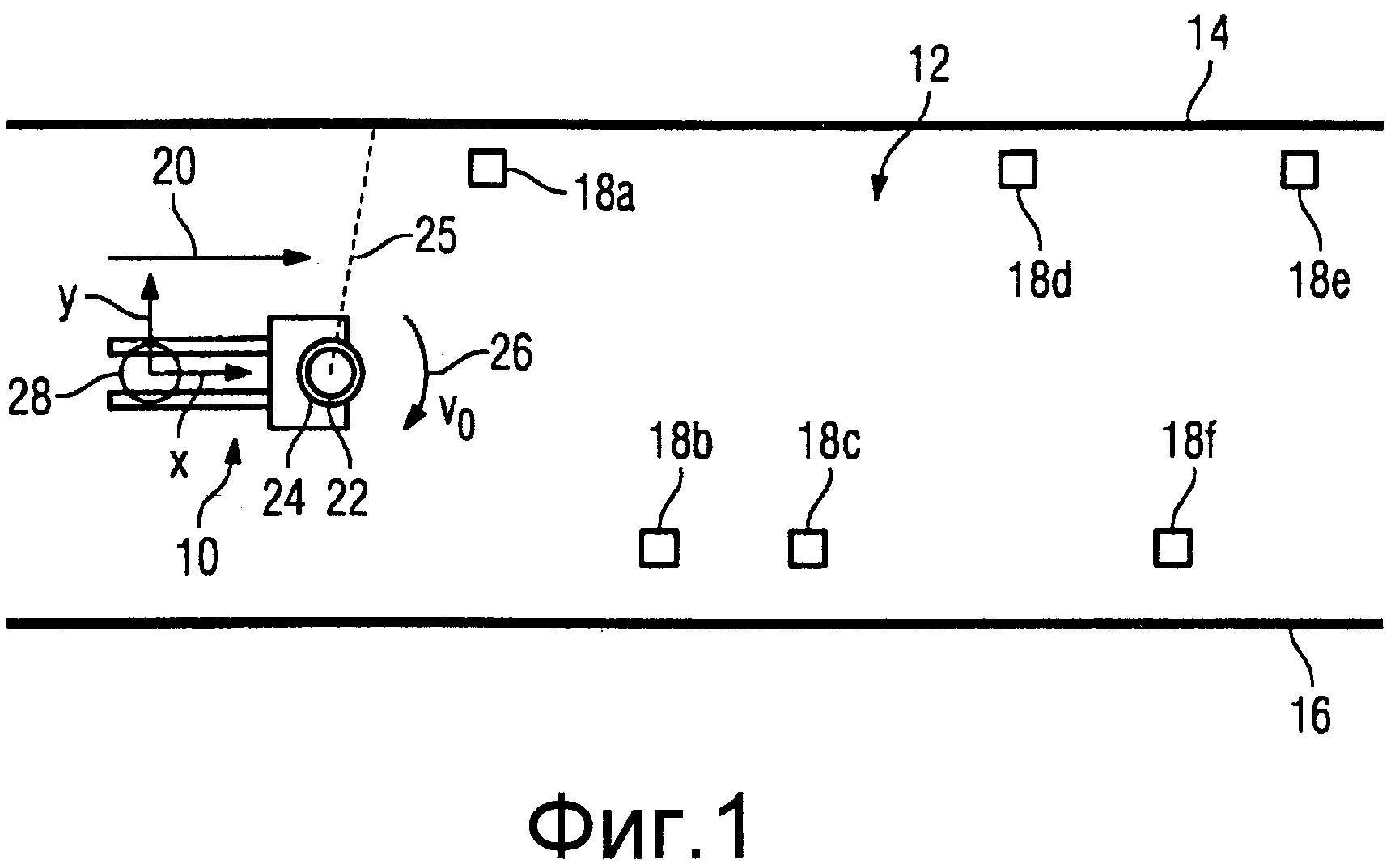
Фиг.1 показывает схематичный вид сверху самоходного моторизованного транспортного средства 10, которое с применением способа автономной локализации должно быть локализовано внутри известной окружающей среды 12, которая в данном случае ограничена двумя расположенными напротив друг друга стенками 14 и 16. Локализация транспортного средства 10 осуществляется на основе естественных ориентиров в форме стенок 14 и 16, а также в форме имеющихся в окружающей среде 12 геометрических структурных элементов 18а, b, c, d, e, f, как, например, трубы, балки колонны и т.п. Эти естественные ориентиры 14, 16, 18а-f во время движения транспортного средства 10 в направлении движения, обозначенном стрелкой 20, регистрируются с помощью расположенного на транспортном средстве 10 измеряющего расстояние датчика 22, который в данном случае представляет собой лазерный сканер. Датчик 22 размещен на двигателе 24 датчика, так что его плоскость измерения посредством приведения в действие двигателя 24 датчика может поворачиваться вокруг непоказанной оси поворота. Посредством поворота датчика 22, как изображено стрелкой 26, окружающая среда 12 может соответственно сканироваться трехмерным образом, чтобы таким способом регистрировать ориентиры 14, 16, 18. Кольцо 28 символизирует при этом неопределенность положения транспортного средства 10 в направлении х и у.
В известном способе автономной локализации двигатель 24 датчика для регистрации ориентиров 14, 16, 18а-f приводится в действие непрерывно с постоянной скоростью v0 в направлении стрелки 26. Скорость v0 при этом выбирается таким образом, что датчик 22 регистрирует окружающую среду 12 с достаточно высокой плотностью данных. Иными словами, датчик 22 не может поворачиваться произвольно быстро, так как иначе регистрация ориентиров 18а-f была бы невозможной. Для локализации транспортного средства 10 в окружающей среде 12 затем зарегистрированные ориентиры 14, 16, 18 сравниваются с предварительно созданной географической картой. Таким способом может осуществляться навигация транспортного средства 10.
При регистрации стен или ориентиров 14, 16 последние обеспечивают информацию локализации относительно y-положения и ориентации транспортного средства 10. Если регистрируются ориентиры 18а-f, то они обеспечивают по существу информацию локализации относительно х-положения транспортного средства.
Регистрация ориентиров 14, 16, ввиду их протяженности, в данном примере является некритичной. Перемещение мимо них без их регистрации невозможно. Локализация транспортного средства в y-положении и ориентация, таким образом, возможны в любой момент. Критичной является, напротив, локализация х-положений транспортного средства, как показывают следующие пояснения.
Ввиду перемещения транспортного средства 10 и времени, которое необходимо для сканирования окружающей среды с требуемой плотностью данных, может произойти, что некоторые из ориентиров 18а-f не регистрируются. Это имеет место в том случае, когда датчик 22, в то время как транспортное средство 10 проезжает мимо одного из ориентиров 18а-f, ориентирован как раз в другом направлении. Тем самым соответствующие ориентиры 18а-f пропускаются. В областях окружающей среды, в которых имеется достаточно много ориентиров 18а-f, это не является проблематичным, так как регистрируется достаточно других ориентиров 18а-f, на основе которых может осуществляться локализация транспортного средства 10. Напротив, «проезд» является критичным в областях окружающей среды с лишь небольшим количеством ориентиров, как это далее поясняется со ссылками на фиг.2-4.
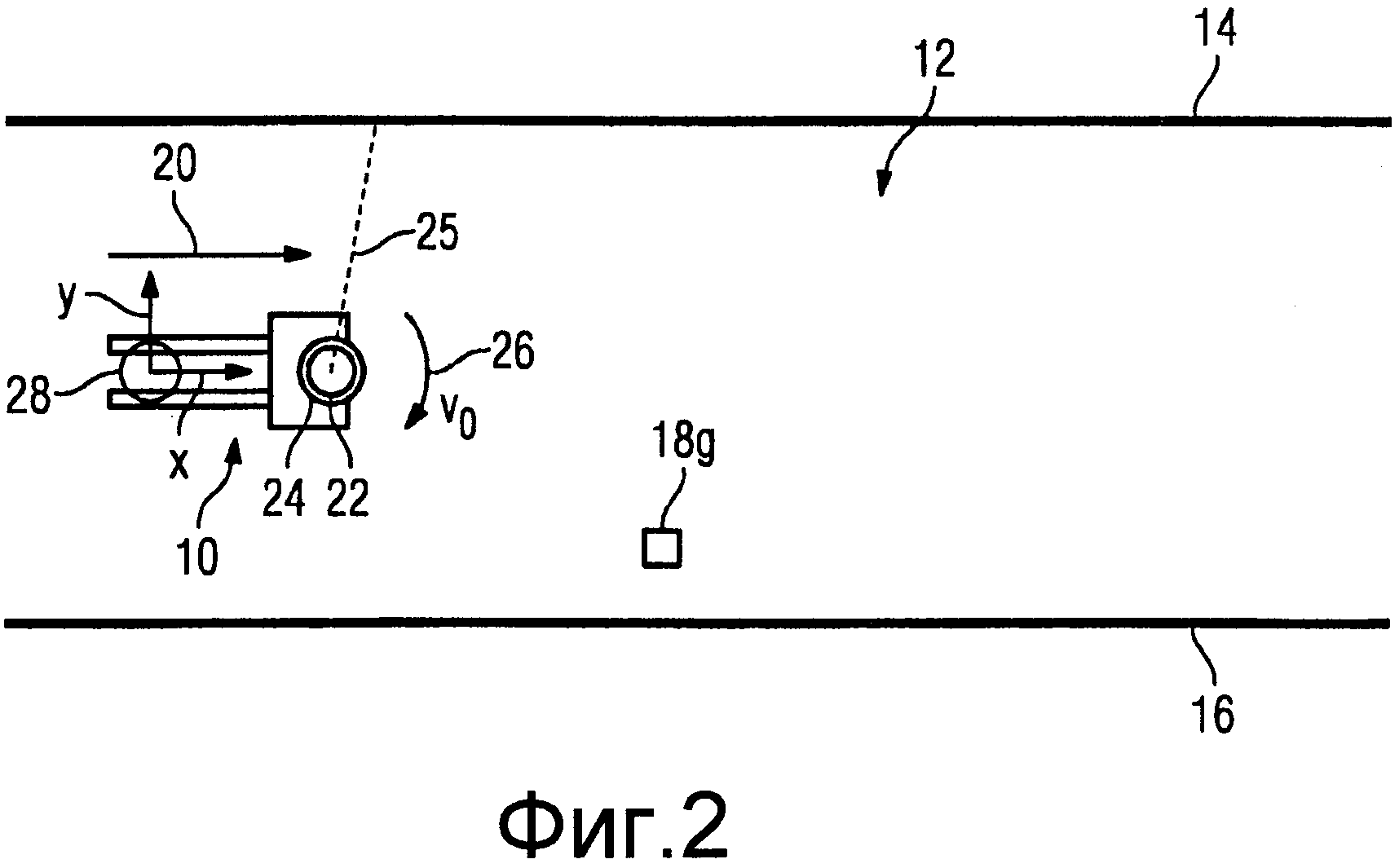
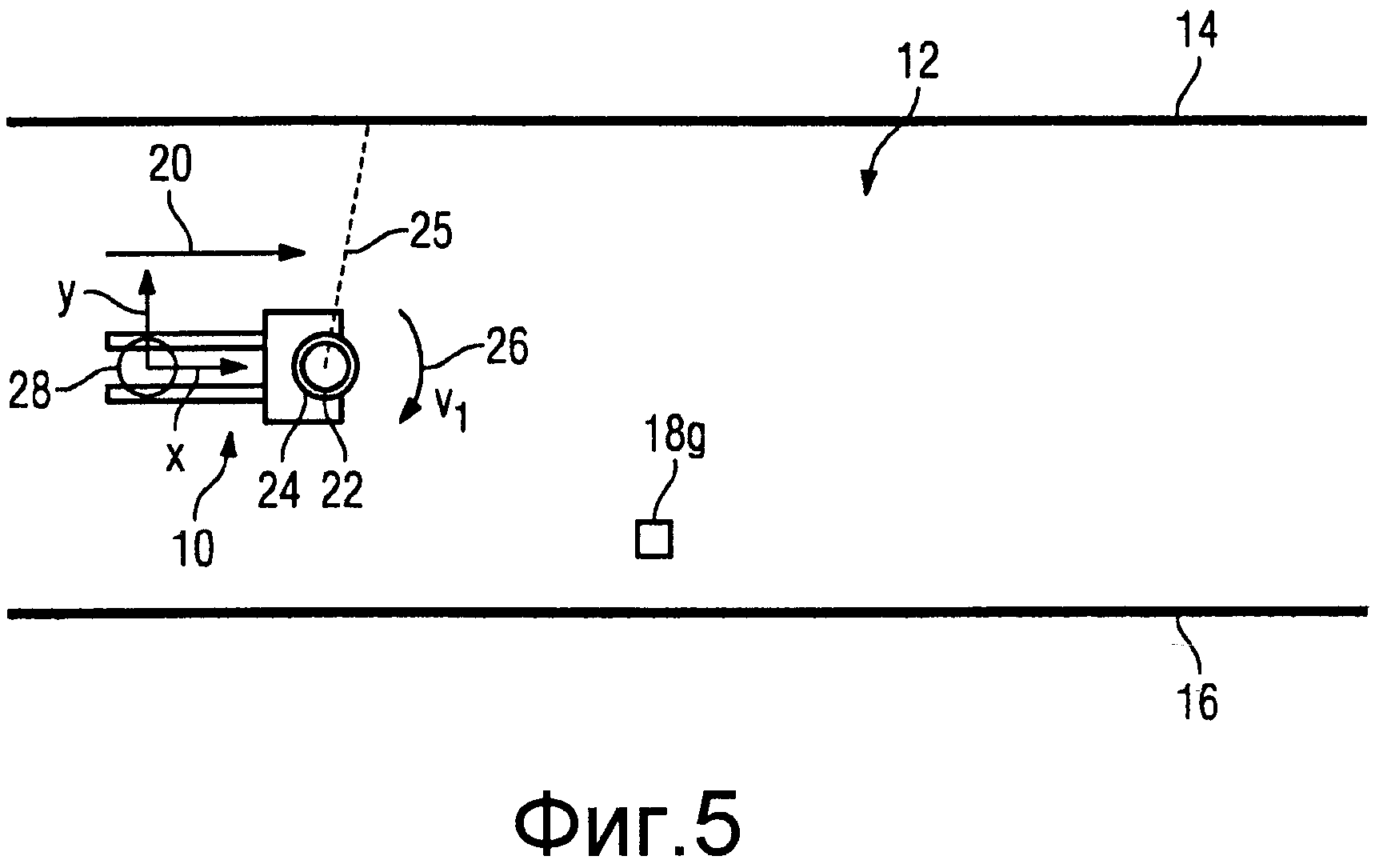
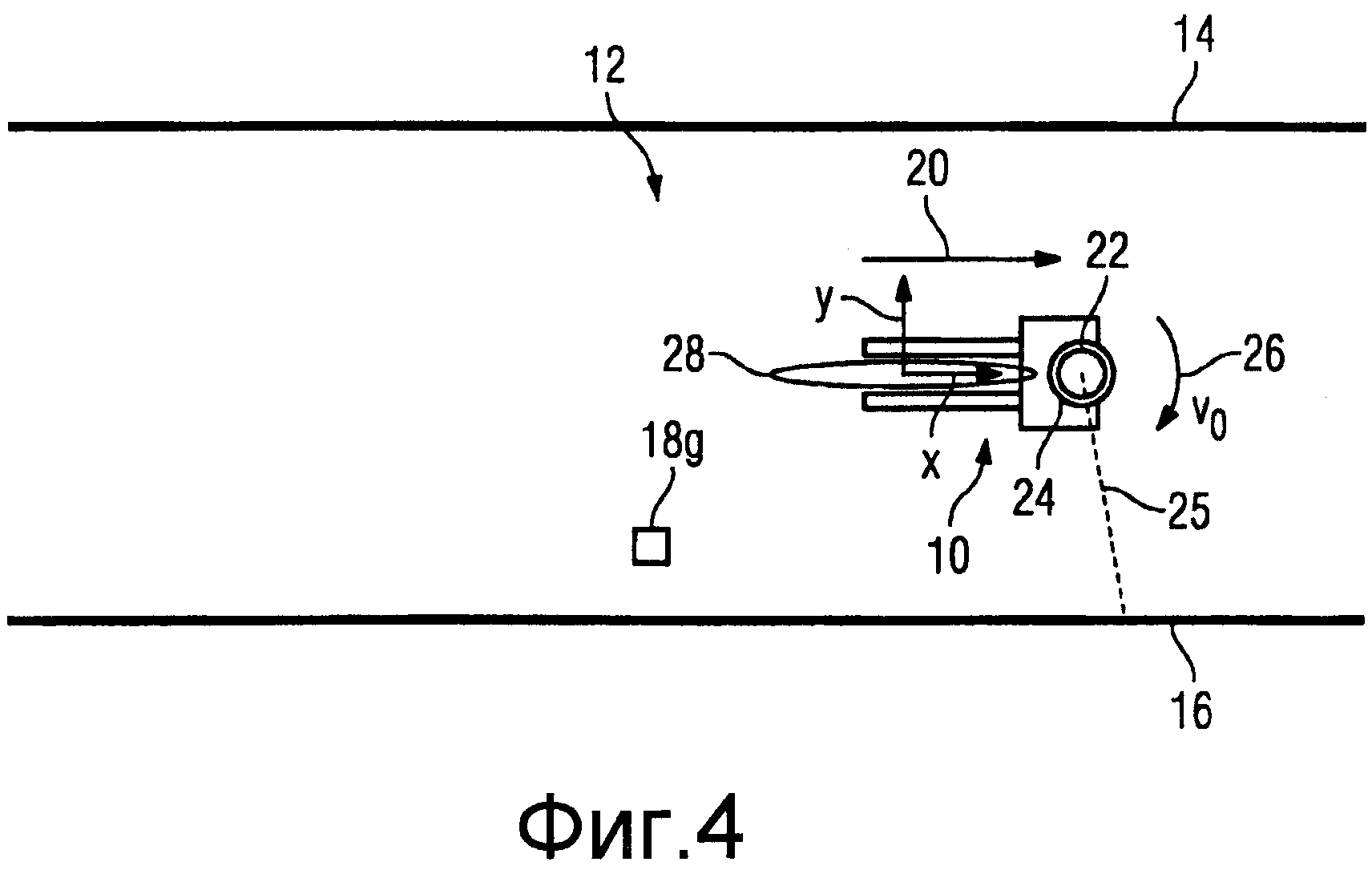
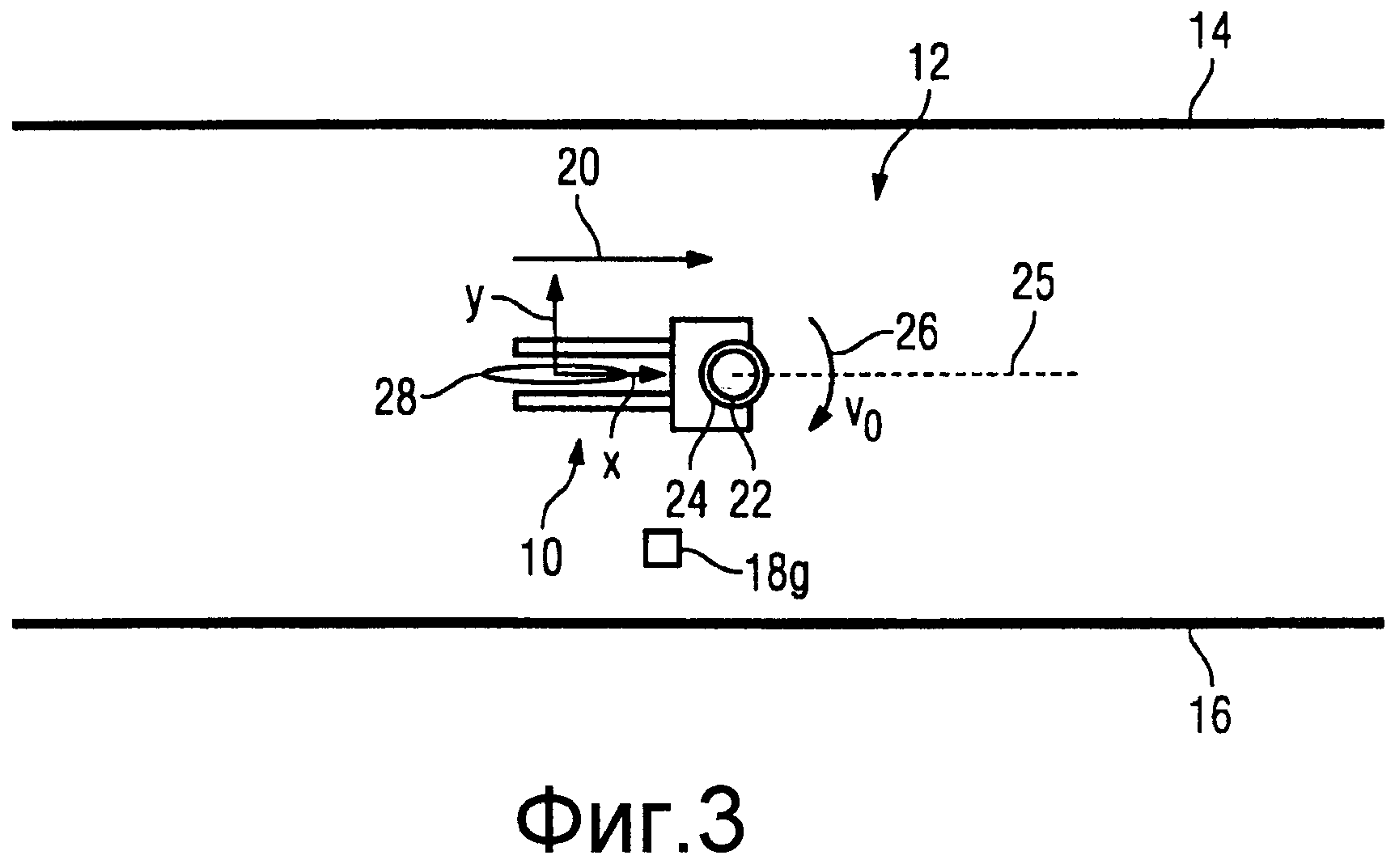
Фиг.2-4 показывают мгновенные снимки во время сканирования областей окружающей среды, в которых имеется только один единственный ориентир 18g, который может служить для локализации транспортного средства 10 внутри этой области окружающей среды. Фиг.1 показывает движущееся в направлении стрелки 20 транспортное средство 10 в первом положении, в котором датчик 22 ориентирован в направлении стенки 14. Если теперь транспортное средство 10 перемещается из показанного на фиг.2 положения далее в направлении стрелки 20 в положение, представленное на фиг.3, в то время как датчик 22 при приведении в действие двигателя 24 датчика поворачивается с постоянной скоростью v0 в направлении стрелки 26, то неопределенность положения в y-направлении снижается ввиду того факта, что расстояния до стенки 14 регистрировались с помощью датчика 22. Напротив, неопределенность положения в х-направлении возрастает, так как на этом участке не могли регистрироваться никакие ориентиры. Если теперь транспортное средство 10, исходя из представленного на фиг.3 положения, перемещается дальше в направлении стрелки 20 в представленное на фиг.4 положение, то становится ясно, что ориентир 18g был пройден, не имея возможности быть зарегистрированным датчиком 22. При этом неопределенность положения в х-направлении увеличивается таким образом, что локализация транспортного средства 10 внутри окружающей среды 12 более невозможна, по причине чего транспортное средство 10 останавливается.
Эта проблема устраняется посредством соответствующего изобретению способа автономной локализации, как это поясняется далее со ссылками на фиг.5-8 с помощью примера осуществления соответствующего изобретению способа.
На первом этапе в соответствующем изобретению способе автономной локализации согласно форме выполнения предложенного изобретения создается географическая карта окружающей среды 12 на основе имеющихся в ней естественных ориентиров 14, 16, 18. На следующем этапе устанавливается предопределенный маршрут, вдоль которого должно двигаться транспортное средство 10 в окружающей среде 12. Затем определяются те ориентиры 18, которые могут служить в качестве вспомогательного средства локализации вдоль предопределенного маршрута. При этом идентифицируются критические области окружающей среды, в которых имеется лишь малое количество заранее определенных ориентиров 18.
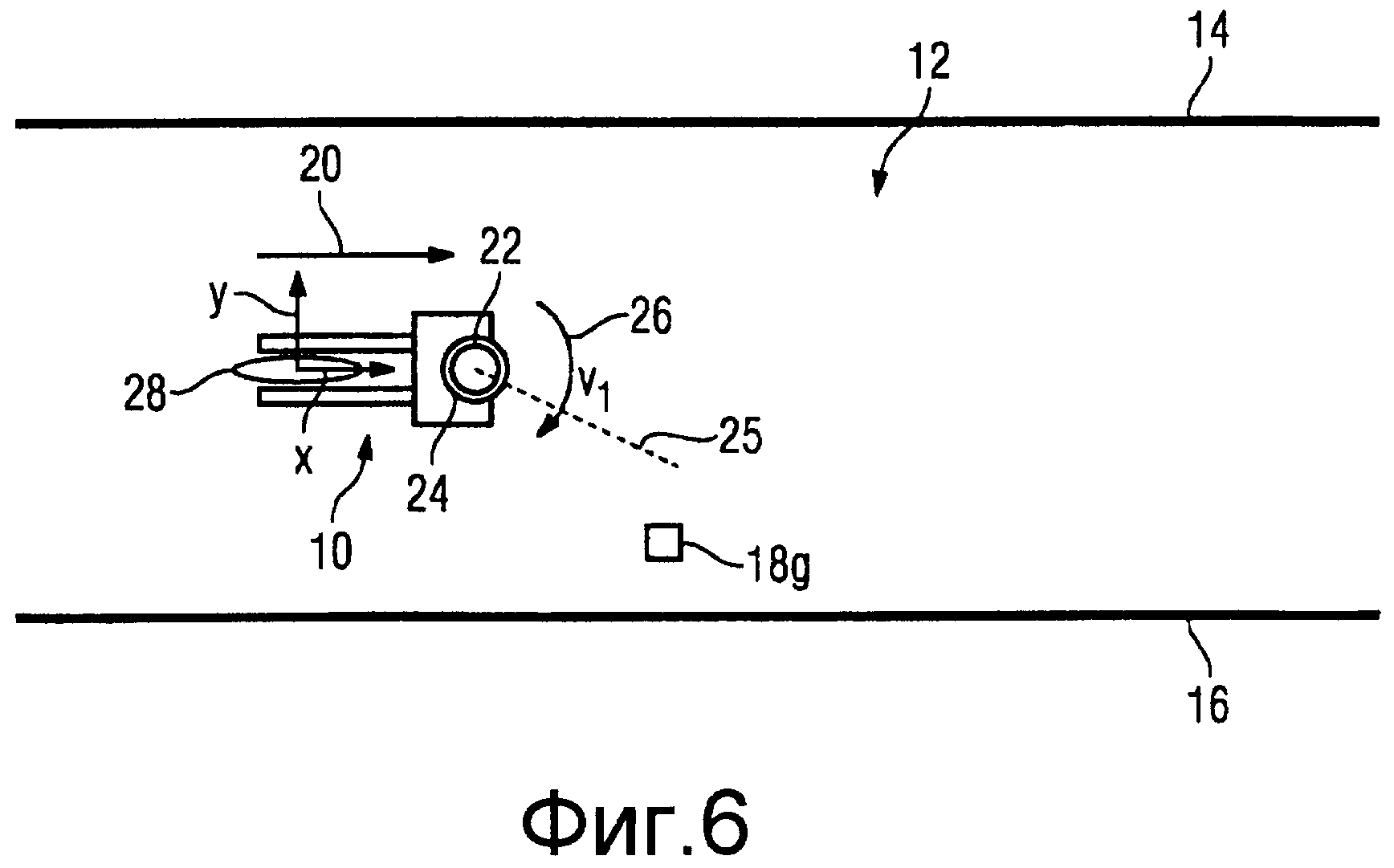
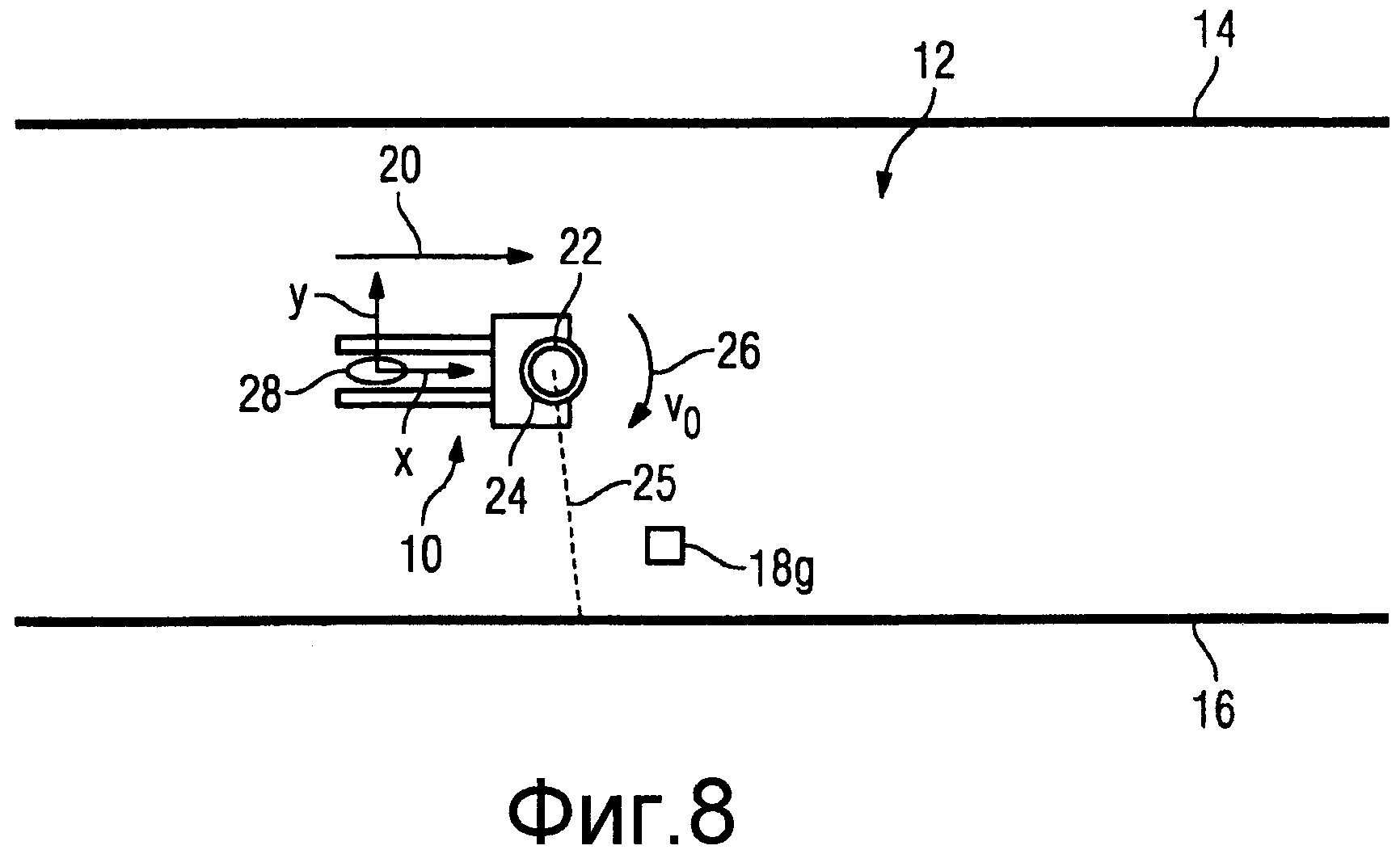
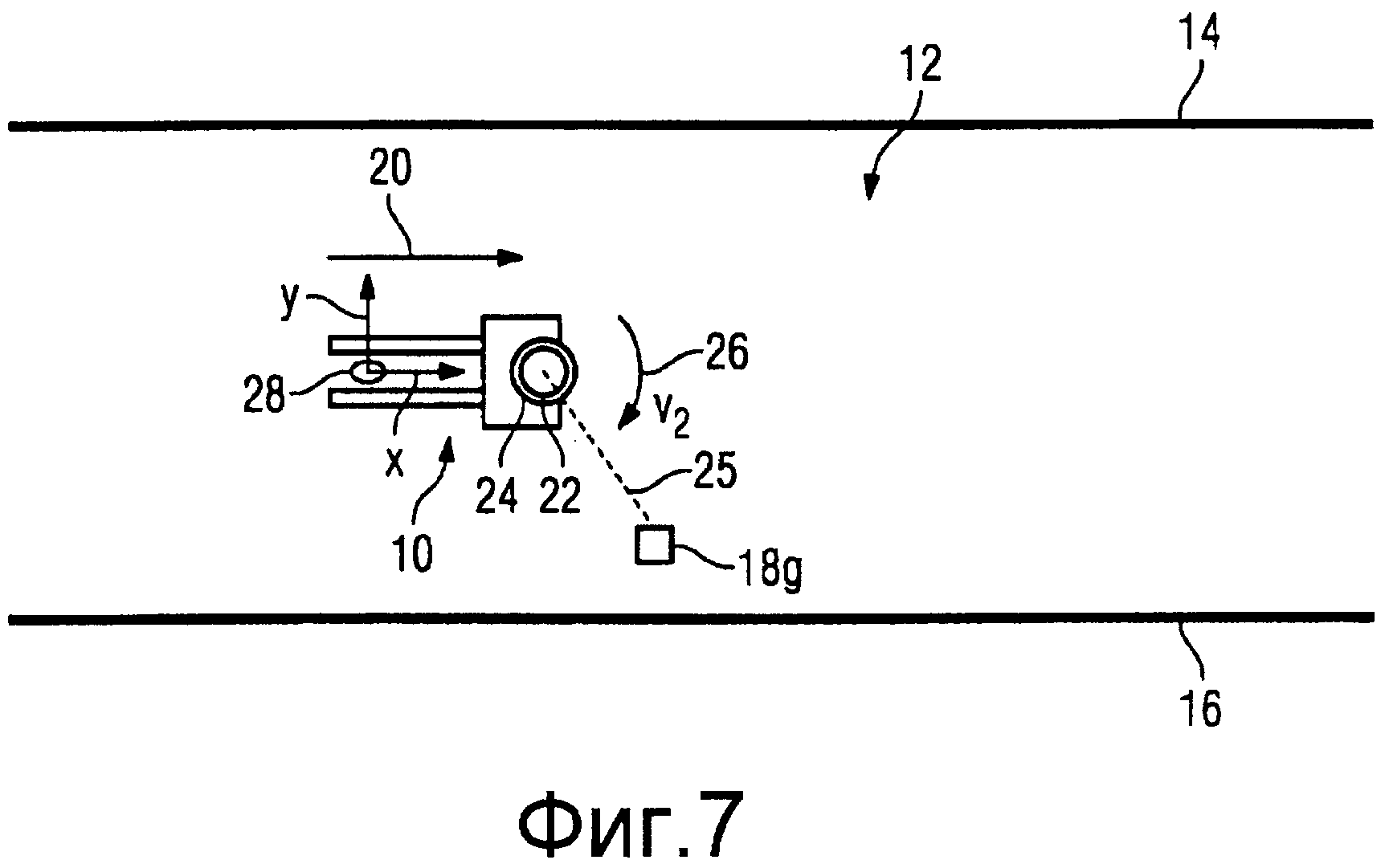
Теперь транспортное средство 10 движется в направлении стрелки 20 с равномерной скоростью вдоль предопределенного маршрута, причем двигатель 24 датчика с постоянной скоростью v0 приводится в действие для поворота датчика 22. Если теперь транспортное средство 10 достигает заранее идентифицированной критичной области окружающей среды, где имеется только малое количество ориентиров, в данном случае один единственный ориентир 18g, как показано на фиг.2, то двигатель 24 датчика активно ускоряется от скорости v0 до скорости v1, так что датчик 22 существенно быстрее поворачивается в направлении стрелки 26. При этом неопределенность положения в y-направлении, как показано на фиг.6, уменьшается, в то время как неопределенность положения в х-направлении возрастает, как это уже было описано выше со ссылкой на фиг.2 и 3. Незадолго перед тем моментом времени, в который датчик 22 регистрирует ориентир 18g, двигатель 24 датчика снова активно управляется, чтобы снизить скорость v1 до скорости v2, причем v2 меньше, чем v0. Это приводит к тому, что датчик 22 регистрирует ориентир 18g с очень высокой плотностью измеренных данных, за счет чего неопределенность положения в х-направлении сильно снижается, как это представлено на фиг.7. После регистрации ориентира 18g датчиком 22 двигатель 24 датчика снова активно управляется, чтобы снова повысить его скорость, например, до скорости v0, как представлено на фиг.8.
Должно быть ясно, что не только скорость двигателя датчика, но и направление поворота двигателя 24 датчика может изменяться для обеспечения регистрации ориентира. Также датчик 22, в качестве альтернативы, может представлять собой однолучевой лазер, который закреплен на двигателе с возможностью поворота вокруг двух осей поворота или измерительный луч которого отклоняется посредством зеркала, закрепленного на двигателе с возможностью поворота относительно двух осей поворота.
Существенное преимущество соответствующего изобретению способа автономной локализации по сравнению со способом, описанным со ссылкой на фиг.2-4, состоит в том, что посредством активного управления двигателем 24 датчика гарантируется, что ориентиры и в тех областях окружающей среды, в которых имеется лишь малое количество ориентиров, регистрируются, так что транспортное средство 10 внутри окружающей среды 12 всегда может локализироваться. Потеря положения транспортного средства и связанное с этим прерывание навигации исключаются. Также снижение скорости транспортного средства в критических областях окружающей среды не требуется для надежной регистрации ориентиров. Снижение скорости двигателя датчика от скорости v1 до скорости v2 в области ориентира 18g в критической области окружающей среды обеспечивает возможность повышения плотности измеренных данных и таким способом надежную регистрацию соответствующих ориентиров 18g. Повышение скорости двигателя датчика от v0 до v1 и связанное с этим снижение плотности измеренных данных приводит к тому, что соответствующий участок окружающей среды сканируется менее интенсивно. Это не создает проблем, так как предварительно проведенный анализ предопределенного маршрута показал, что на участке окружающей среды, который датчик 22 сканирует во время ускорения двигателя 24 датчика, не имеется никаких релевантных ориентиров 18. На участках окружающей среды без ориентиров 18 сканирование может вообще отсутствовать, если неопределенность положения в y-направлении не слишком высока. Чем меньше регистрируется ненужных данных, тем быстрее и проще транспортное средство 10 может быть локализовано внутри окружающей среды 12.
Если скорость транспортного средства не постоянная, то она предпочтительно регистрируется с помощью соответствующего датчика, например, с применением датчика, регистрирующего число оборотов колес транспортного средства. Актуально зарегистрированная скорость транспортного средства учитывается затем при локализации транспортного средства 10.
Транспортное средство с установкой водоснабжения и охлаждения
Турбинный аэродинамический профиль
Система управления
Рельсовое транспортное средство, снабженное устройством защиты от травмирования дверями
Дисковое тормозное устройство для рельсовых транспортных средств
Выдвижная подножка для рельсового транспортного средства
Гибкая транспортировочная упаковка
Приводной механизм для электрических коммутационных приборов с тремя отдельными положениями
Способ и устройство для контроля целостности поезда
Разделительное устройство для разделения смеси
Сплав, защитный слой и конструктивный элемент
Адаптивная активная катодная защита
Система и способ для заблаговременного распознавания повреждения в подшипнике
Способ и система для быстрого переключения резервного источника питания в множественном источнике питания
Регулировка воздушного зазора в гидравлической тормозной системе
Способ подсоединения по меньшей мере двух электрических кабелей, а также соединительное устройство, конструктивный узел, электрическая машина и соответствующее транспортное средство
Ускоритель и способ управления ускорителем
Тормозная система с интеллектуальным исполнительным механизмом для торможения рельсового транспортного средства
Высоковольтный источник постоянного напряжения и ускоритель частиц
Рельсовое транспортное средство, снабженное кожухом фронтального сцепного устройства

