Результат интеллектуальной деятельности: СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ФОТОЭНЕРГОУСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к солнечной энергетике и может найти применение при разработке и изготовлении установок с концентраторными фотоэлектрическими модулями, требующими наведения на Солнце в режиме реального времени.
Известна механизированная система для слежения за Солнцем с модельным прогнозирующим управлением (см. заявка RU 2011134891, МПК F24J 2/38, опубликована 27.02.2013), состоящая из платформы по меньшей мере с одной солнечной панелью, колонны, служащей опорой для этой платформы и обеспечивающей возможность вращения платформы вокруг двух ортогональных осей, двух линейных исполнительных механизмов, системы приводов для этих механизмов и системы модельного прогнозирующего управления, включающей компьютер, который вычисляет требуемые положения линейных исполнительных механизмов, используя множество опорных координат в качестве входной информации, и связан с системой привода для приведения линейных исполнительных механизмов в требуемые положения, опорные координаты включают в себя время суток, год, дату, географические координаты от системы позиционирования, бортовые часы, ориентацию основания, положения цилиндров, углы соединительных элементов, положения клапанов гидравлических цилиндров и данные датчика слежения за Солнцем, и системы управления с обратной связью, которая передает информацию, получаемую датчиками, в систему модельного прогнозирующего управления, причем система модельного прогнозирующего управления и система управления с обратной связью функционируют как одно целое.
Существенным недостатком известной системы является использование в качестве привода поворота рамы сложной гидравлической конструкции и невозможность точного наведения при малых освещенностях датчиков и диффузионной составляющей солнечной радиации при наличии слабой облачности.
Известна установка слежения за Солнцем (см. патент US 8389918, МПК G01C 21/02, H01J 40/14, G06M 7/00, опубликован 05.03.2013), которая состоит из основания, платформы с солнечными панелями, двумя гидравлическими линейными актуаторами, соединяющими основание и платформу, солнечного датчика на платформе и центрального процессора, который обрабатывает сигналы датчика и вырабатывает сигналы управления на линейные актуаторы, приводящие во вращение платформу с солнечными модулями.
Недостатком известной установки является сложная конструкция датчика, который совмещает в себе датчик грубой настройки на Солнце (для возможности захвата солнечного излучения оптической системой точного датчика) и точный датчик, работающий в очень узком угловом диапазоне. Кроме того, процессору управления требуются датчики позиционирования платформы при восходе и заходе Солнца.
Известна система слежения за Солнцем (см. патент KR 101275244, МКП F24J 2/54, H02S 20/32, опубликован 17.06.2013), состоящая из основной рамы с вертикальным валом, платформы с возможностью поворота вокруг горизонтальной оси, солнечных панелей, смонтированных на этой платформе, оптического цилиндрического датчика азимутального угла поворота вертикального вала, оптического цилиндрического датчика зенитального угла поворота платформы с модулями вокруг горизонтальной оси, оптического датчика солнца и контроллера, обеспечивающего точное направление солнечных модулей на Солнце в течение всего светового дня и возврат платформы в начальное положение при восходе Солнца при помощи системы электрических приводов. Контроллер получает сигналы от оптических цилиндрических датчиков азимутального и зенитального углов поворота панели модулей и от датчика солнца, обрабатывает эти данные и выдает сигналы на исполнительные двигатели для точного сопровождения Солнца.
Недостатком такой системы является сложная конструкция оптического датчика солнца, который должен обеспечить, во-первых, широкий угол захвата солнечного излучения для случая сильного рассогласования направления платформы по отношению к солнечному диску, а во-вторых, узкую полосу захвата для точного сопровождения Солнца. Фактически это достигается размещением двух оптических датчиков в одном корпусе.
Известна система цифрового интеллектуального контроля сопровождения Солнца для концентраторной солнечной установки (см. заявка CN 103105853, МПК G05D 3/00, опубликована 15.05.2013). Установка состоит из двухосевой поворотной платформы с солнечными модулями, командного блока управления и контроля, двух приводных каналов и оптического датчика солнца. Основой командного блока является высокоскоростной процессор, который по запрограммированному алгоритму движения Солнца в режиме реального времени рассчитывает азимутальный и зенитальный углы положения Солнца и выдает управляющие команды системам привода поворотной платформы через определенные промежутки времени. Точность расчета не превышает 2 градусов. По такой программе происходит движение поворотной платформы в случае отсутствия прямого солнечного излучения. При наличии прямого солнечного излучения контроллер переводит управление поворотной платформой на управление от солнечного однокаскадного сенсора, собранного по четырехквадрантной схеме. В этом случае контроллер корректирует направление на Солнце всей панели по максимуму сигнала с солнечного сенсора по каждому из каналов.
Недостатком известной системы контроля сопровождения платформы с солнечной панелью является сильная расстройка сигнала от солнечного сенсора в случае появления облачности и, как следствие этого, хаотичное микродвижение платформы в направлениях поиска максимума сигнала от рассеянного облачностью солнечного излучения до момента появления Солнца из-за облаков.
Наиболее близкой по совокупности существенных признаков к настоящему решению является система позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки (см. патент US 7079944, МКП G01C 21/26, опубликован 24.02.2005). Известная система позиционирования и слежения за Солнцем фотоэнергоустановки содержит платформу с концентраторными каскадными модулями, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу, первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу, второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными каскадными модулями вокруг двух взаимно перпендикулярных плоскостей, блок питания, блок управления положением платформы с блоком памяти, содержащий микроконтроллер, в качестве которого использован 12-битный, с АЦП преобразователем микроконтроллер MSP430F149 фирмы Texas Instruments, с программой, рассчитывающей в реальном режиме времени положение Солнца по введенным в блок памяти координатам станции, дате и точном времени наблюдения, GPS приемник и оптический солнечный датчик. В известной системе позиционирования и слежения за Солнцем фотоэнергоустановки для грубой настройки на Солнце, когда последнее скрыто за облачностью, используют способ управления азимутальным и зенитальным приводами по программе, заложенной в микроконтроллер, которая через определенные интервалы времени рассчитывает теоретическое местоположение Солнца с точностью ±2 угловых градуса. Информацию об углах, под которыми платформа направлена на небосвод, определяют с помощью GPS приемника. По внутренним часам микроконтроллера и данным с GPS приемника блок управления рассчитывает текущее направление платформы и теоретическое положение Солнца и вырабатывает сигналы о величине рассогласования по азимутальному и зенитальному углах с учетом местоположения платформы (широта, долгота, высота над уровнем моря), после чего первым и вторым электродвигателями производится соответствующая переориентация платформы до момента, когда углы рассогласования не станут равны нулю. В случае прямого солнечного излучения при выходе Солнца из-за облаков управление платформой переходит на управление от оптического солнечного датчика. В этом случае блок управления системы получает входные данные от оптического солнечного датчика, расположенного на платформе с концентраторными каскадными модулями, и выдает подстраивающие сигналы на силовой блок, подающий электропитание на первый и второй электродвигатели, для точной настройки платформы с солнечными модулями на Солнце. В этом случае точность позиционирования достигает величины ±0,01 угловых градуса. В качестве оптического солнечного датчика в известной системе-прототипе использована CCD матрица фотоприемников солнечного излучения, выполненная из 8 фототранзисторов, симметрично расположенных в четырех квадрантах. Матрица фотоприемников расположена на фокусном расстоянии от входного объектива оптического солнечного датчика.
Недостатком известной системы позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки является невозможность точного сопровождения платформы за Солнцем при малых освещенностях оптического солнечного датчика и наличии диффузной (рассеянное солнечное излучение) составляющей солнечной радиации. В этом случае система переходит на управление по программе, заложенной в микроконтроллер, с точностью наведения не лучше ±2-х градусов и соответственно увеличенным временем поиска Солнца после выхода последнего из-за облаков. Кроме того, использование в оптическом солнечном датчике в качестве приемников солнечного излучения двумерной матрицы фототранзисторов приводит к усложнению технологии построения самого приемника: необходимо использовать качественный фокусирующий объектив и применять сложный алгоритм обработки сигналов с матрицы фототранзисторов.
Задачей настоящего изобретения являлась разработка такой системы позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки, которая обеспечивала бы сопровождение солнечного диска с необходимой точностью независимо от погодных условий (дымка, облачность) и сводила бы к минимуму собственное потребление энергии за счет исключения срабатывания оптического солнечного датчика при его засветке от светлых пятен в облаках.
Поставленная задача решается тем, что система позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки содержит платформу с концентраторными каскадными модулями, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу и первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу и второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными модулями вокруг двух взаимно перпендикулярных плоскостей, силовой блок, блок управления положением платформы с блоком памяти, содержащий микроконтроллер с программой, рассчитывающей в реальном режиме времени положение Солнца по введенным в блок памяти координатам станции, дате и точном времени наблюдения, оптический солнечный датчик, фотоприемники которого выполнены в виде каскадных фотопреобразователей, датчик оборотов первого электродвигателя, датчик оборотов второго электродвигателя. Выходы датчика положения платформы по азимутальному углу, датчика положения платформы по зенитальному углу, оптического солнечного датчика, датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя соединены с соответствующими входами блока управления, первый и второй выходы которого подключены к первому и второму входам силового блока, первый и второй выходы которого соединены соответственно с первым и вторым электродвигателями.
Новым в системе является включение в ее состав датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя и выполнение фотоприемников оптического солнечного датчика в виде каскадных фотопреобразователей, аналогичным тем, что установлены в концентраторных каскадных модулях системы. Применение каскадных фотопреобразователей, например, трехкаскадных на основе соединений А3В5, в качестве приемников излучения в оптическом датчике обосновано тем, что спектральная светочувствительность таких фотопреобразователей (300 нм - 1800 нм) максимально приближена к кривой спектрального распределения прямого солнечного излучения, в отличие от традиционно применяемых кремниевых приемников, имеющих более узкую полосу спектральной чувствительности (400 нм - 800 нм). При затенении Солнца облаками происходит как снижение интенсивности солнечного излучения, воспринимаемого каскадными фотоприемниками, так и изменение спектра такого непрямого солнечного излучения. В результате, сигналы вырабатываемые каскадным фотоприемником при освещении незатененным Солнцем и освещении Солнцем, затененным облаками или атмосферной пылью, будут значительно отличаться по величине, что позволяет установить такое пороговое значение сигнала каскадного фотопреобразователя, которое исключит переход с сопровождения Солнца по заложенной в микроконтроллер программе на сопровождение по оптическому солнечному датчику при освещении каскадного фотоприемника излучением от “светлых пятен” в облачности. В случае применения в датчике стандартных однокаскадных фотоприемников (например кремниевых), последние будут реагировать только на предварительно заданный порог изменения интенсивности падающего излучения, не учитывающий изменение спектрального состава излучения. Поэтому при наличии в затеняющих облаках, в зависимости от их микрофизических свойств, ярких центров рассеяния солнечного излучения, интенсивность которых будет превышать заданный порог, произойдет переход с сопровождения Солнца по заложенной в микроконтроллер блока управления программе на сопровождение по оптическому солнечному датчику, который будет ориентироваться не на Солнце, а на эти “светлые пятна” в просветах облаков, и платформа может существенно переориентироваться от реального местоположения Солнца. В этом случае, после выхода Солнца из-за облаков, платформа будет захватывать Солнце не мгновенно, а в течение некоторого времени, иногда довольно значительного. Повышение точности сопровождение Солнца достигается также с помощью датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя, по показаниям которых блок управления в течение всего времени слежения за Солнцем по оптическому датчику рассчитывает усредненные угловые скорости поворота платформы в азимутальном и в зенитальном направлениях для каждого управляющего импульса в отдельности и сохраняет эти данные в блоке памяти в течение определенного, заданного программой, интервала времени. При затенении Солнца сопровождение продолжается по заложенной в микроконтроллер программе, но с использованием последних, сохраненных в блоке памяти значений, усредненных угловых скоростей поворота платформы в азимутальном и в зенитальном направлении, что обеспечивает возможность точного сопровождения Солнца даже в случае появления на небе дымки или облачности.
Настоящее изобретение поясняется чертежом, где:
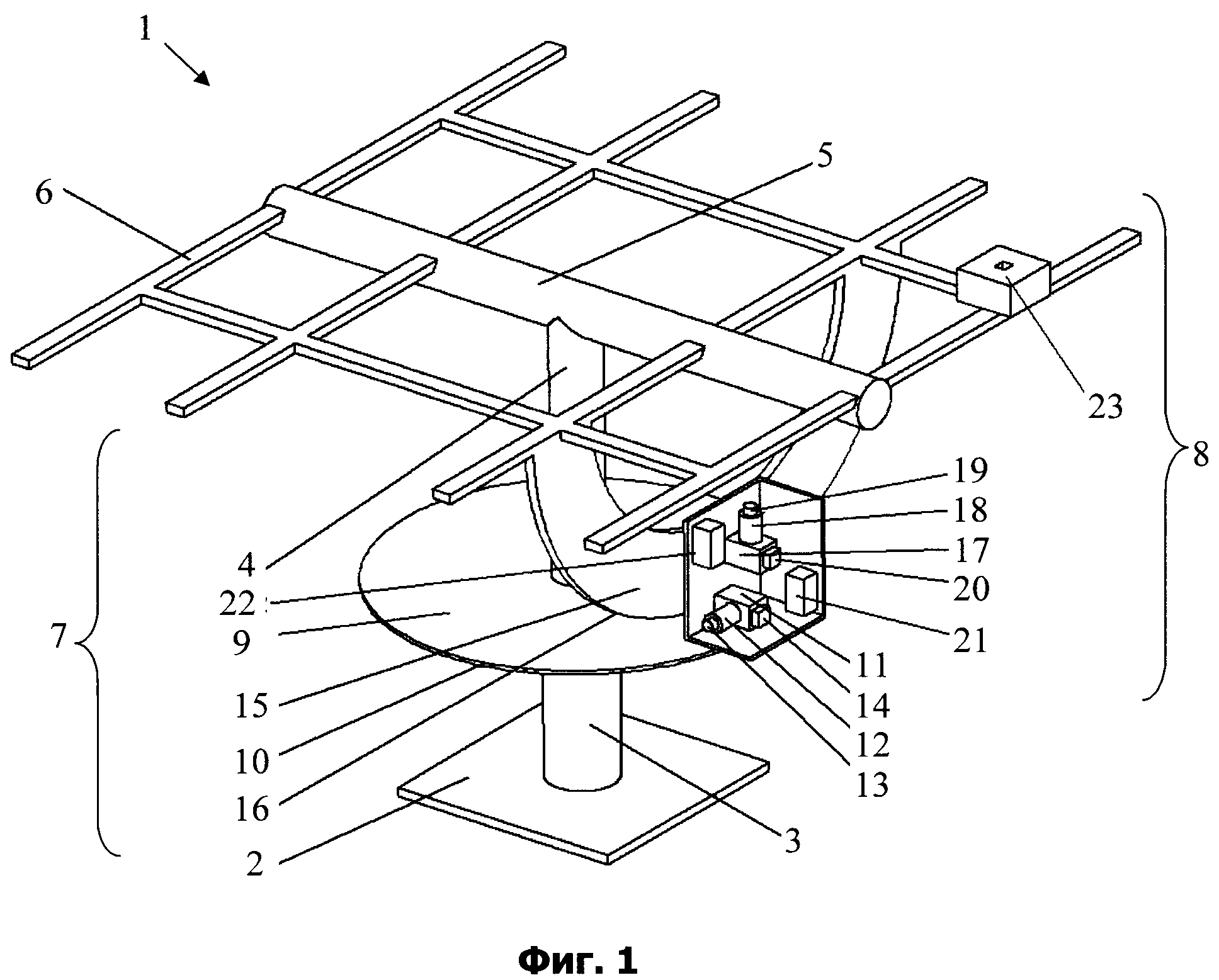
на фиг. 1 показан общий вид в аксонометрии системы позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки (со снятыми концентраторными каскадными модулями);
на фиг. 2 приведена блок-схема электрической части системы позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки.
Система 1 позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки содержит установленную на основании 2 неподвижную вертикальную колонну 3, на верхний торец которой надета с возможностью вращения труба 4, на верхней части которой установлена с возможностью вращения вокруг своей оси горизонтальная труба 5, на которой закреплена платформа 6 для установки на ней концентраторных каскадных модулей (на чертеже не показаны). Система 1 включает также подсистему 7 азимутального вращения и подсистему 8 зенитального вращения. Подсистема 7 азимутального вращения включает закрепленный на вертикальной колонне 3 горизонтальный диск 9 с однорядной роликовой цепью 10, приваренной по торцу диска 9. В контакте с цепью 10 находится ведущая звездочка редуктора 11, например механического, жестко связанного с первым электродвигателем 12 (ЭД1), снабженного датчиком 13 оборотов (ДО1). На корпусе редуктора 11 установлен датчик 14 положения платформы по азимутальному углу (ДППАУ). Подсистема зенитального вращения 8 содержит прикрепленный снизу к платформе 6 вертикальный сектор 15 с круговой торцевой поверхностью 16. На поверхности 16 приварена однорядная цилиндрическая цепь, в контакт с которой входит ведущая звездочка, насаженная на вал редуктора 17, например механического, жестко связанного с вторым электродвигателем 18 (ЭД2), снабженного датчиком 19 оборотов (ДО2). На корпусе редуктора 17 установлен датчик 20 положения платформы по зенитальному углу (ДППЗУ). В качестве угловых датчиков ДППАУ 14 и ДППЗУ 20 могут быть применены 10-битные магнитные энкодеры, например, серии AS5040, оси которых жестко связаны с осями соответствующих редукторов 11, 17. В состав системы 1 входят также силовой блок 21 (СБ) и блок управления 22 положением платформы (БУ) с блоком памяти, содержащий микроконтроллер с программой, рассчитывающей в реальном режиме времени положение Солнца по введенным в блок памяти координатам солнечной станции, дате, точном времени расчета и угловые скорости поворота платформы 6 в азимутальном и в зенитальном направлении (количество оборотов приводных двигателей ЭД1 и ЭД2 в единицу времени). На платформе 6 установлен оптический солнечный датчик 23 (ОСД), который состоит из четырех фотоприемников, выполненных в виде каскадных фотопреобразователей размером, например, 5×5 мм, расположенных в четырех квадрантах в одной плоскости на некотором расстоянии друг от друга. На рассчитанной высоте над каскадными фотопреобразователями расположена прозрачная для солнечного излучения входная диафрагма в виде прямоугольника с размерами, которые рассчитаны для получения необходимого углового разрешения датчика, как по азимутальному, так и по зенитальному углам ОСД 23. Выходы ДППАУ 14, ДППЗУ 20, ОСД 23, ДО1 13 и ДО2 19 соединены с соответствующими входами БУ 22, первый и второй выходы (азимутальный и зенитальный углы) которого подключены к первому и второму входам СБ 21, первый и второй выходы которого соединены соответственно с ЭД1 12 и ЭД2 18.
Система 1 позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки работает следующим образом. В начальный период времени при восходе Солнца платформа 6 с концентраторными каскадными модулями находится в теоретически рассчитанной угловой позиции таким образом, чтобы перпендикуляр к общей поверхности модулей был направлен в точку восхода. Далее при появлении из-за горизонта солнечного диска, излучение последнего достигает приемной поверхности ОСД 23 и система 1 переходит в режим слежения за Солнцем в реальном масштабе времени. Процесс слежения продолжается непрерывно вплоть до момента захода Солнца за горизонт. Далее платформа 6 с модулями поворачивается в первоначальную позицию и “ожидает” момент восхода Солнца. Управление движением платформы вокруг двух взаимно перпендикулярных осей с необходимой точностью осуществляется при помощи БУ 22, который, во-первых, через заданные промежутки времени производит расчеты теоретического положения Солнца на небосводе по одному из известных алгоритмов, которые работают в том или ином приближении (в зависимости от выбранного алгоритма точность расчета меняется в пределах 1-2 угловых градуса). Входными данными для этих расчетов являются введенная в блок памяти БУ 22 координаты станции, дата и точное время, считываемые с внутренних часов БУ 22. Во-вторых, БУ 22 по сигналам от ДППАУ 14 и по сигналам от датчика ДППЗУ 20 рассчитывает в реальном масштабе времени направление самой платформы 6. Сравнивая в заданные промежутки времени расчетное положение Солнца и реальное направление платформы 6, БУ 22 рассчитывает углы рассогласования и выдает сигналы на СБ 21, который приводит во вращение платформу с помощью ЭД1 12 и ЭД2 18 по азимутальному и зенитальному углам. Вращение платформы происходит до тех пор, пока углы рассогласования не станут равными нулю. Третья функция БУ 22 заключается в том, что он, по запрограммированному пороговому уровню сигнала интенсивности солнечного излучения, переводит управление всей системой 1 на управление по сигналам от ОСД 23. Точность настройки в таком режиме зависит от конструкции ОСД 23 и в нашем примере составляет около 0,02 угловых градуса. Управление по ОСД 23 происходит всегда, когда на приемных элементах ОСД 23 присутствует прямое солнечное излучение. В случае появления временно затеняющих Солнце помех, таких как легкие облака, сильная пыль, прямое солнечное излучение не достигает входного окна ОСД 23, и БУ 22 переводит сопровождение Солнца системой 1 по программе с коррекцией, заложенной в микроконтроллер БУ 22, при этом на имеющиеся на небе яркие пятна от рассеянного солнечного излучения ОСД 23 не срабатывает. Сопровождение Солнца системой 1 по заложенной в микроконтроллер БУ 22 программе с коррекцией осуществляется с использованием усредненных за несколько импульсов управления значений угловых скоростей поворота платформы 6 в азимутальном и в зенитальном направлениях, которые были записаны в блок памяти в последний временной интервал перед моментом затенения Солнца и последующим переходом управления платформой 6 на управление по скорректированной программе. При этом автоматически происходит процесс минимизации всех погрешностей, неизбежно возникающих в механических соединениях приводных систем в процессе эксплуатации системы 1. Движение платформы 6 осуществляется по усредненным значениям угловых скоростей до момента появления прямого солнечного излучения, на которое срабатывает ОСД 23, и далее сопровождение платформой 6 за солнечным диском переходит на управление с точностью не хуже 0,02 угловых градуса по сигналам с ОСД 23, обрабатываемых в БУ 22. Во время такого сопровождения платформы 6 аналоговый сигнал с четырех фотоприемников, выполненных в виде каскадных элементов, ОЗС 23 поступает на БУ 22, оцифровывается и обрабатывается стандартным 8-битным микроконтроллером AVR, например ATmega8. В тот момент времени, когда разность сигналов с двух противоположных фотоприемников (каждая пара приемников дает информацию по соответствующим каналам) превысит запрограммированную величину, микроконтроллер выдает управляющие сигналы для азимутального и зенитального каналов (первый и второй входы) на СБ 21. Электрические сигналы с первого и второго выходов СБ 21 поступают соответственно на ЭД1 12 и ЭД2 18, которые через соответствующие редуктора поворачивают платформу 6 на необходимые углы.
Система позиционирования и слежения за Солнцем концентраторной фотоэнергоустановки, содержащая платформу с концентраторными каскадными модулями, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу, первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу, второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными модулями вокруг двух взаимно перпендикулярных плоскостей, силовой блок, блок управления положением платформы с блоком памяти, содержащий микроконтроллер с программой, рассчитывающей в реальном режиме времени положение Солнца по введенным в блок памяти координатам станции, дате и точном времени наблюдения, оптический солнечный датчик, фотоприемники которого выполнены в виде каскадных фотопреобразователей, датчик оборотов первого электродвигателя, датчик оборотов второго электродвигателя, при этом выходы датчика положения платформы по азимутальному углу, датчика положения платформы по зенитальному углу, оптического солнечного датчика, датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя соединены с соответствующими входами блока управления, первый и второй выходы которого подключены к первому и второму входам силового блока, первый и второй выходы которого соединены соответственно с первым и вторым электродвигателями.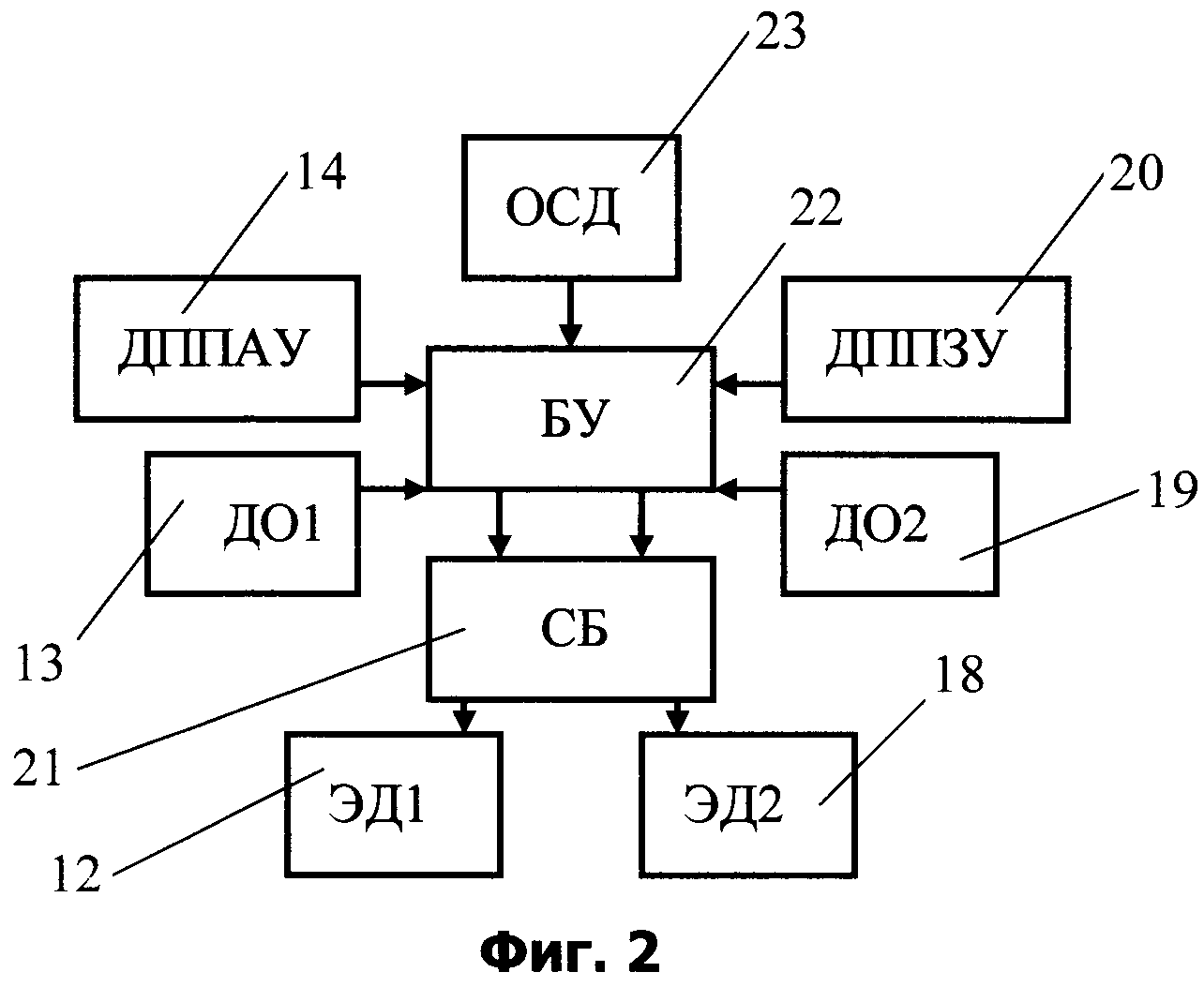
Устройство для генерации второй гармоники оптического излучения
Способ подстройки коэффициента деления волноводного разветвителя на подложке ниобата лития
Фотопреобразователь лазерного излучения
Гетероструктура мощного полупроводникового лазера спектрального диапазона 1400-1600 нм
Устройство для генерации второй гармоники оптического излучения
Устройство для генерации второй гармоники оптического излучения
Устройство защиты литографического оборудования от пылевых металлических частиц
Способ изготовления гетероструктуры ingaasp/inp фотопреобразователя
Способ упрочнения поверхности вольфрамовой пластины
Способ получения нанокомпозитного материала на основе алюминия
Способ подстройки коэффициента деления волноводного разветвителя на подложке ниобата лития
Фотопреобразователь лазерного излучения
Способ изготовления гетероструктуры ingaasp/inp фотопреобразователя
Оптоволоконный фотоэлектрический свч модуль
Способ изготовления фотодетекторов мощного оптоволоконного свч модуля
Фотодетекторный свч модуль
Мощный импульсный свч фотодетектор
Способ изготовления импульсного фотодетектора
Способ изготовления свч фотодетектора
Свч фотоприемник лазерного излучения

