Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ ИМПУЛЬСНЫХ СИГНАЛОВ
Вид РИД
Изобретение
Изобретение относится к способу формирования последовательности импульсных сигналов, используя процессор, в частности, для системы калибровки системы измерения синхронизации венцов в турбомашине или другом вращающемся оборудовании.
Турбомашина в машиностроении является машиной, передающей энергию между ротором и текучей средой, содержащей турбины и компрессоры. Турбина переносит энергию от текучей среды к ротору, а компрессор переносит энергию от ротора к текучей среде. Простейшие турбины имеют одну движущуюся часть, агрегат ротора, который является валом или барабаном с прикрепленными лопатками. Движущаяся текучая среда воздействует на лопатки или лопатки взаимодействуют с потоком, так чтобы они двигались и передавали ротору вращательную энергию. Таким образом, лопатки, в частности, в газовых и паровых турбинах, ответственны за извлечение энергии из высокотемпературного газа высокого давления, протекающего через турбину.
Лопатки турбины подвергаются воздействию очень напряженной окружающей среды, особенно в газовой турбине. Они сталкиваются с высокими температурами, большими напряжениями и со средой с потенциально высокими вибрациями. Все три эти фактора могут приводить к разрушению лопаток, что может вывести из строя двигатель, и лопатки турбины тщательно разрабатываются, чтобы противостоять этим условиям. Поэтому лопатки турбины часто являются ограничивающим компонентом газовых турбин. Чтобы выдерживать воздействие столь тяжелой окружающей среды, лопатки турбины часто используют экзотические материалы, такие как суперсплавы, и множество различных способов охлаждения, таких как внутренние воздушные каналы, охлаждение граничного слоя и тепловые барьерные покрытия.
Кроме того, в отношении вибрации лопаток турбины во время работы турбины обычно ведется непрерывный контроль вибрации лопаток, чтобы на ранней стадии обнаруживать резонансные и потенциально вызывающие повреждение колебания и иметь возможность им противодействовать. Чтобы избежать вмешательства в работу турбины, это обычно делается посредством систем измерения синхронизации венцов при вибрации лопаток (Blade Vibration Tip Timing Measurement, BVTTM), используемых для бесконтактного измерения амплитуд вибрации лопаток и обнаружения частот вибрации сборочных узлов лопаток. Эти системы могут применяться как к паровым турбинам, так и к газовым турбинам, причем применение, однако, не ограничивается только этими типами турбомашин.
Система BVTTM, в принципе, обычно измеряет время прохождения венца вращающихся лопаток по меньшей мере между двумя круговыми датчиками с очень высокой точностью. Вибрации лопаток в результате дадут более короткие или более длительные времена прохождения. Эти изменения времени прохождения измеряются и используются для вычисления амплитуд вибрации лопаток. Системы BVTTM обычно состоят по меньшей мере из четырех основных компонент:
- многочисленные датчики (в том числе, для источников питания, охлаждения, кабельной сети, преобразователей сигналов и т.д.),
- переключающая логика и аппаратурное обеспечение измерений времени прибытия или алгоритмы программного обеспечения,
- устройство анализа данных в реальном времени и отображения данных, в том числе, устройство хранения данных, и
- программное обеспечение автономного анализа данных.
Полная цепочка измерения от датчика до отображаемых и запоминаемых результатов подвержена воздействию многочисленных источников ошибок, которые могут оказывать существенное влияние на конечный результат. Особое внимание должно быть уделено математическим алгоритмам, которые реализуются в программном обеспечении. Эти математические программы являются чрезвычайно сложными и используют косвенные и итерационные алгоритмы вычисления, которые часто основаны на случайности и используют эмпирические предположения и гипотезы. Следовательно, поведение устройства не полностью предсказуемо и точность измерения при конкретных обстоятельствах и настройках датчиков неизвестна. В крайнем проявлении это может привести к фатальным ошибкам отображаемых результатов по амплитуде или по частоте.
Поэтому системы BVTTM часто не способны давать правильные результаты начиная с первого дня работы новой турбомашины и должны калиброваться и регулироваться для конкретной турбины, в которую они устанавливаются во время первого прогона. Это, конечно, создает серьезный риск, поскольку вибрации не могут быть обнаружены должным образом и повреждение турбомашины может произойти во время первого прогона, в частности, когда, например, проверяется новая модель турбины с неизвестными механическими свойствами.
В принципе, эта проблема может быть решена калибровкой системы BVTTM до начала работы, подавая на систему BVTTM искусственно созданные и поэтому известные входные сигналы, проверяя результаты, полученные системой BVTTM, и точно настраивая систему при сравнении ее результатов с известными входными данными. В целом, для создания таких входных сигналов могут использоваться импульсные генераторы на основе цифровых или аналоговых способов или их комбинации.
Однако оказывается, что способы формирования последовательности импульсных сигналов, доступные на предшествующем уровне техники, неспособны создать импульсные сигналы, требующиеся для калибровки системы BVTTM. Причиной этого является специфический характер необработанных сигналов, обнаруженных датчиками. Последовательности импульсов должны быть созданы с точностью по времени в диапазоне наносекунд, что требует импульсных генераторов с процессором с тактовыми частотами в диапазоне трехзначных мегагерцовых частот, то есть больше чем 100 миллионов циклов процессора в секунду. Кроме того, при моделировании произвольных частот вибрации разности времени между импульсами являются непериодическими. Поскольку системы BVTTM требуют нескольких секунд времени измерения для соответствующей функции, это означает, что должны создаваться от нескольких тысяч до сотен тысяч импульсов с различными временными интервалами. Благодаря тому что системы BVTTM требуют по меньшей мере двух датчиков, эти последовательности импульсных сигналов должны создаваться для множества каналов одновременно.
Проблема, которую настоящее изобретение хочет решить, заключается поэтому в обеспечении способа формирования последовательности импульсных сигналов, используя процессор, позволяющий проводить калибровку системы измерения синхронизации венцов в турбомашине, чтобы повысить эксплуатационную безопасность и продолжительность срока службы турбомашины.
Эта задача решается в изобретении способом, содержащим этапы, на которых:
- сохраняют несколько элементов времени ожидания в блоке памяти,
- создают импульсный сигнал в блоке выходного сигнала во время по меньшей мере одного цикла процессора,
- считывают элемент времени ожидания из упомянутого блока памяти, и
- создают нулевой сигнал в упомянутом блоке выходного сигнала для нескольких циклов процессора, полученных из упомянутого считанного элемента времени ожидания.
Изобретение основано на том соображении, что причиной, по которой импульсные генераторы предшествующего уровня техники не способны создавать заданные последовательности импульсных сигналов, является использование памяти. Хотя импульсные генераторы предшествующего уровня техники могут обеспечивать заданную разрешающую способность по времени (тактовая частота процессора 100-1000 МГц), они могут создавать произвольные последовательности импульсов только в течение очень коротких периодов, в диапазоне миллисекунд. Этот короткий период недостаточен для получения результатов измерений в системе BVTTM, которая нуждается в периодах больше 10 секунд для должной калибровки даже 100-1000 секунд.
Изобретатели признали, что причиной этого является архитектура памяти импульсных генераторов предшествующего уровня техники. Обычно желаемый выходной сигнал хранится в памяти, используя один байт для данного логического режима в заданный момент времени. Импульсная последовательность затем создается посредством последовательного считывания байтов в каждом цикле процессора и создания соответствующего сигнала, считываемого из байта в блоке выходного сигнала. Используя этот способ, одноканальная импульсная последовательность с тактовой частотой 100 МГц (то есть, разрешающая способность 10 нс) и продолжительностью 10 секунд потребует 953 мегабайт памяти. Система с 16 параллельными каналами должна потребовать 16 гигабайт памяти. Такой размер памяти в сочетании с заданной скоростью доступа в настоящее время технически невозможен. Изобретатели признали, что это является той причиной, по которой импульсные генераторы со свойствами, требуемыми для калибровки системы BVTTM, недоступны на предшествующем уровне техники.
Для улучшения доступных способов, чтобы получить более длительные последовательности импульсов для проведения калибровки системы BVTTM, использование памяти должно, следовательно, быть оптимизировано. Здесь может использоваться структура импульсов, требующихся для калибровки системы BVTTM. Датчики синхронизации венцов создают определенные импульсы, в которые вставляются периоды нулевого сигнала различной длительности. Таким образом, требуемый сигнал содержит периоды нулевого сигнала, единственной характеристикой которого является его длительность, то есть длительность, соответствующая времени ожидания между импульсами. Таким образом, вместо заполнения блока памяти нулевыми значениями для каждого из циклов процессора в течение времени ожидания та же самая информация должна храниться как единый элемент времени ожидания, содержащий длительность времени ожидания между импульсами в блоке памяти в единицах циклов процессора или в единицах времени, которые могут легко быть преобразованы в циклы процессора для известной тактовой частоты. Вместо непрерывно считываемых элементов памяти для каждого цикла процессора и непосредственного направления считанных данных на блок выходного сигнала после создания импульсного сигнала элемент времени ожидания считывается из блока памяти и нулевой сигнал в блоке выходного сигнала создается для множества циклов процессора, полученных из упомянутого считанного элемента времени ожидания. В течение времени ожидания доступ ни к какой памяти не осуществляется, поскольку устройство входит в состояние ожидания.
Заметим, что нулевой сигнал выводится, конечно, между окончанием одного импульса и началом следующего импульса. Элемент времени ожидания может либо непосредственно содержать время от конца каждого импульса до начала следующего импульса, либо содержать время от начала каждого импульса до начала следующего импульса, указывая время ожидания между запуском первого импульса и запуском второго импульса. В первом случае количество циклов процессора, в которых выводится нулевой сигнал, будет вычисляться непосредственно из времени, содержащегося в элементе времени ожидания. Во втором случае количество циклов процессора, в которых выводится нулевой сигнал, вычисляется с момента в элементе времени ожидания минус время длительности первого импульса. В обоих случаях количество, однако, получают из времени в элементе времени ожидания.
Предпочтительно способ содержит этап сохранения множества элементов формы импульса в упомянутом блоке памяти. Это позволяет определять различные формы импульса, которые могут распространяться на несколько циклов процессора с различной длительностью, амплитудой и другими характеристиками. Эти формы импульсов могут затем использоваться всякий раз, когда по сигналу должен быть создан определенный импульс, просто обращаясь к участку памяти, в которой хранятся формы импульсов.
В дополнительном предпочтительном варианте осуществления способ дополнительно содержит этап сохранения множества элементов идентификаторов формы импульса в упомянутом запоминающем блоке, причем каждый элемент идентификатора формы импульса относится к одному из упомянутых элементов формы импульса. Затем, создание импульсного сигнала содержит считывание элемента идентификатора формы импульса из упомянутого блока памяти и создание импульсного сигнала согласно элементу формы импульса, соответствующему упомянутому элементу идентификатора формы импульса. Это позволяет не только экономить объем памяти, используя заданные формы импульса, но также создавать произвольные последующие комбинации различных форм импульса в соответствии с заданным образцом. В этом варианте осуществления во время создания последовательности сигналов элементы идентификатора формы импульса и элементы времени ожидания будут поочередно считываться из памяти. После считывания элемента идентификатора формы импульса образец формы импульса, хранящийся в элементе формы импульса, к которому делается обращение, посылается на выход в течение определенного количества циклов процессора, соответствующих длительности элемента формы импульса. Далее, элемент времени ожидания считывается из памяти и нулевой сигнал посылается на выход в течение определенного количества циклов процессора, полученных из времени ожидания, хранящегося в элементе времени ожидания. Создание последовательности элементов идентификаторов формы импульса и элементов времени ожидания и запоминание ее в памяти с некоторой информацией в отношении порядка следования поэтому обеспечивает достаточные степени свободы в отношении сигналов, требующихся для калибровки системы BVTTM.
Предпочтительно сигналы, созданные в упомянутом блоке выходного сигнала для каждого цикла, вводятся в цифроаналоговый преобразователь. Это позволяет создание непрерывного аналогового сигнала, как требуется для калибровки системы BVTTM.
Предпочтительно для выполнения описанного способа может быть реализован импульсный генератор, содержащий процессор, блок памяти, блок выходного сигнала и цифроаналоговый преобразователь.
Система калибровки для системы измерения синхронизации венцов в турбомашине предпочтительно содержит упомянутый импульсный генератор. Как описано выше, описанный здесь способ резко уменьшает использование памяти и позволяет создание импульсных сигналов чрезвычайно большой длительности. Сокращение использования памяти также позволяет одновременно создавать сразу несколько сигналов, таким образом, система калибровки предпочтительно содержит множество упомянутых импульсных генераторов, причем тактовые циклы импульсных генераторов синхронизированы. Поэтому сигналы всех датчиков BVTTM могут моделироваться, чтобы проводить калибровку системы.
Система измерения синхронизации венцов для турбомашины предпочтительно калибруется с помощью описанной системы калибровки. Это обеспечивает, в частности, высокую безопасность при эксплуатации с первой секунды прогона новой турбомашины, потому что система BVTTM будет немедленно предоставлять правильные высококачественные результаты.
Предпочтительно турбомашина, в частности газовая турбина, содержит описанную систему измерения синхронизации венцов и энергоустановка предпочтительно содержит такую турбомашину.
Преимущества, достигнутые изобретением, в частности, содержат то, что за счет сохранения последовательностей импульсов с помощью форм импульсов, вставляемых между элементами времени ожидания, использование памяти резко снижается. Поскольку доступ к памяти с равными промежутками и, таким образом, использование памяти, зависящее от тактовой частоты процессора импульсного генератора, больше не являются существенными, становится возможным выход более длительных последовательностей импульсов с наносекундной разрешающей способностью. Использование этих импульсных сигналов для калибровки системы BVTTM турбомашины, например паровой или газовой турбины, повышает эксплуатационную безопасность, особенно во время первого прогона.
Примерный вариант осуществления изобретения описывается далее с помощью чертежей, на которых:
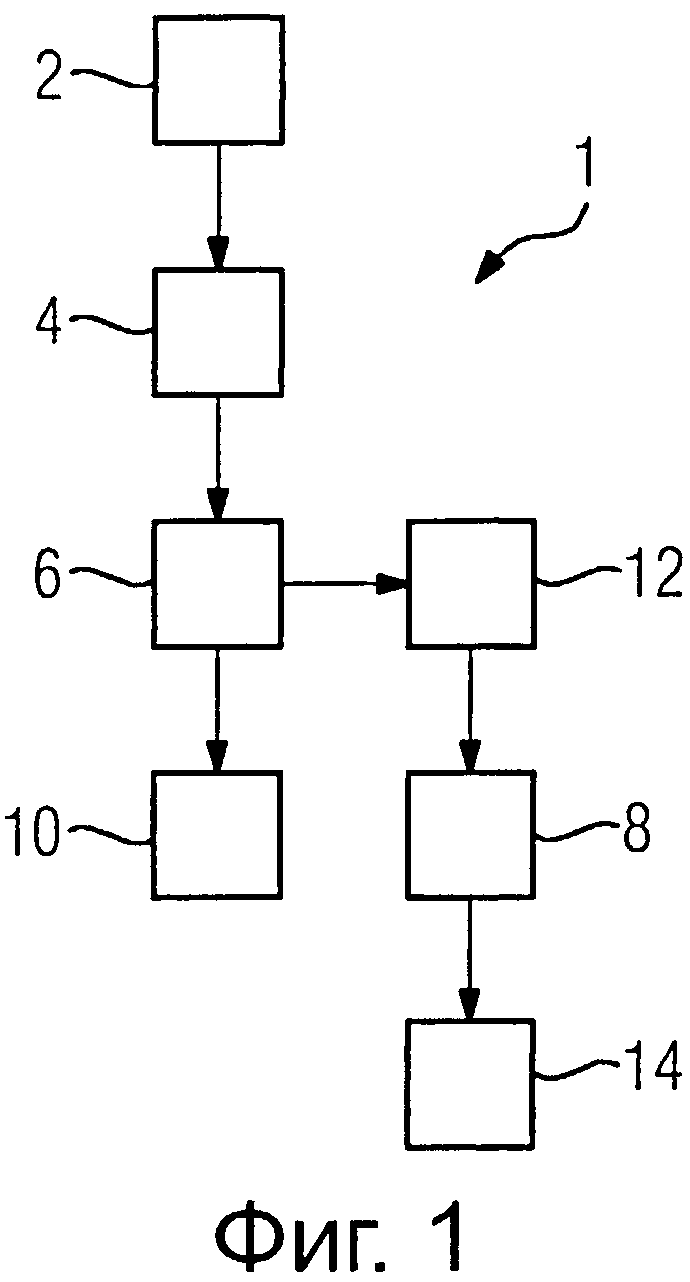
Фиг.1 - схематичная последовательность выполнения операций системы измерения синхронизации венцов вибрации лопаток (BVTTM),
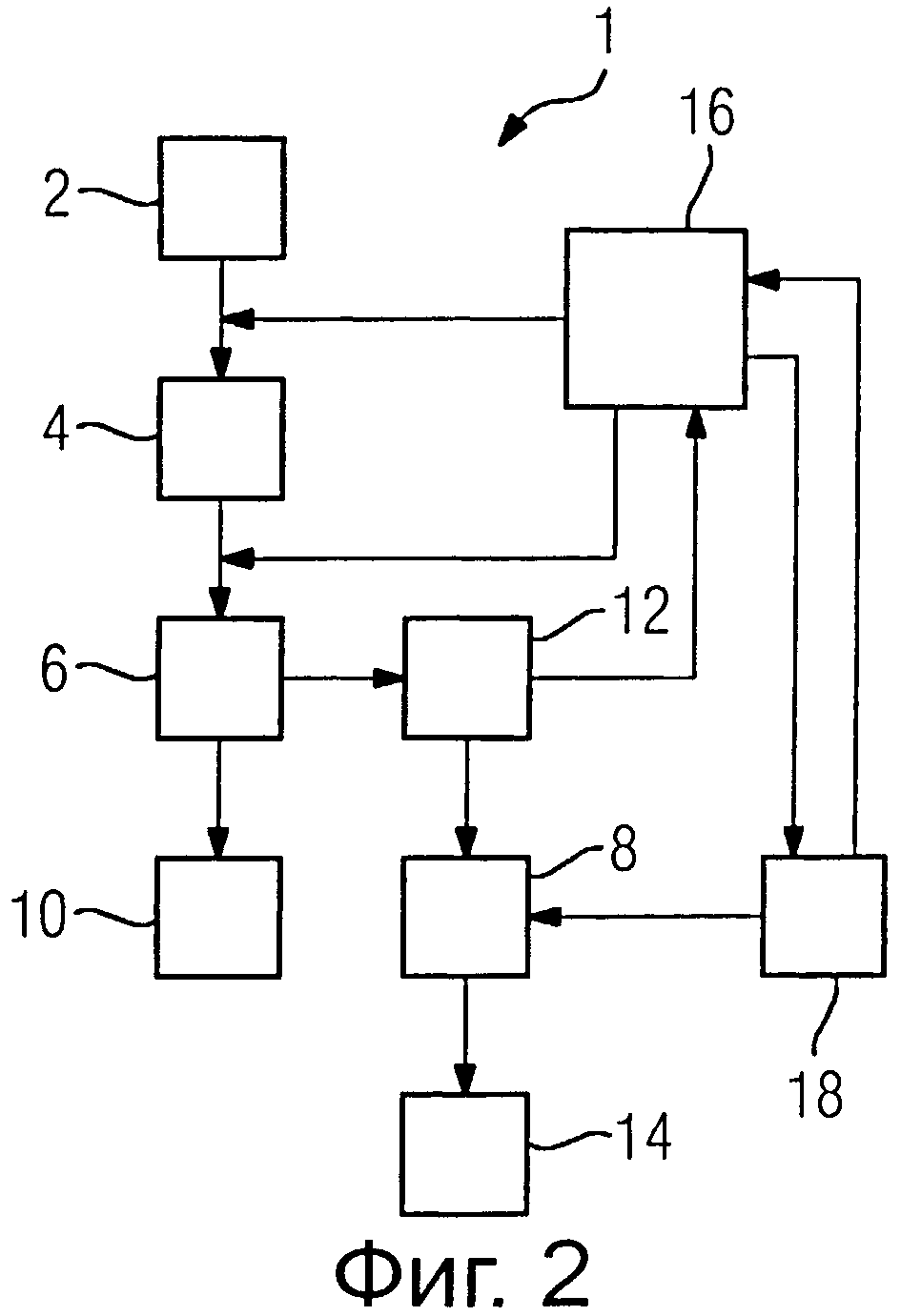
Фиг.2 - схематичная последовательность выполнения операций согласно фиг.1 вместе со схематичным представлением системы калибровки и ее взаимодействия с системой BVTTM,
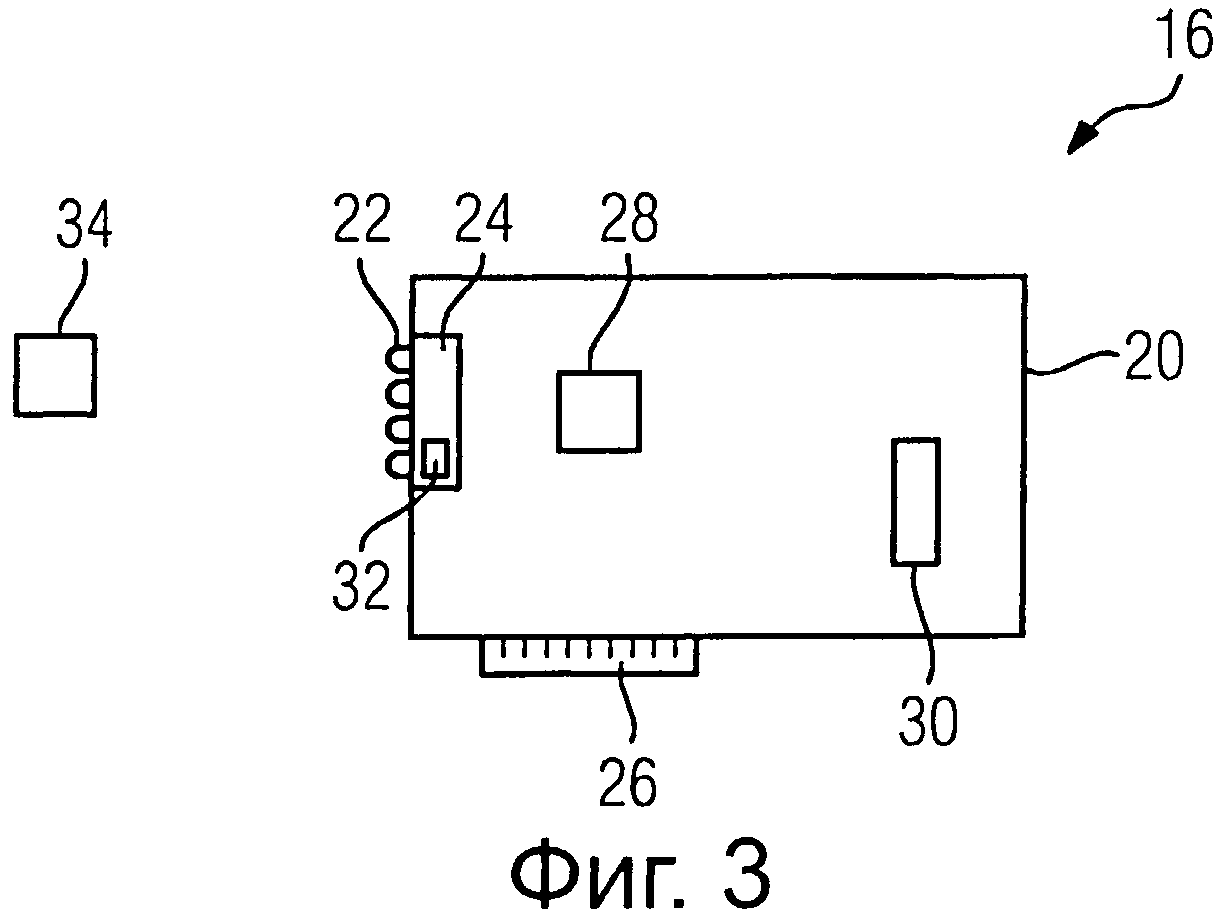
Фиг.3 - схематичное представление системы калибровки для системы BVTTM,
Фиг.4 - график типичного образца импульса, созданный системой калибровки, и
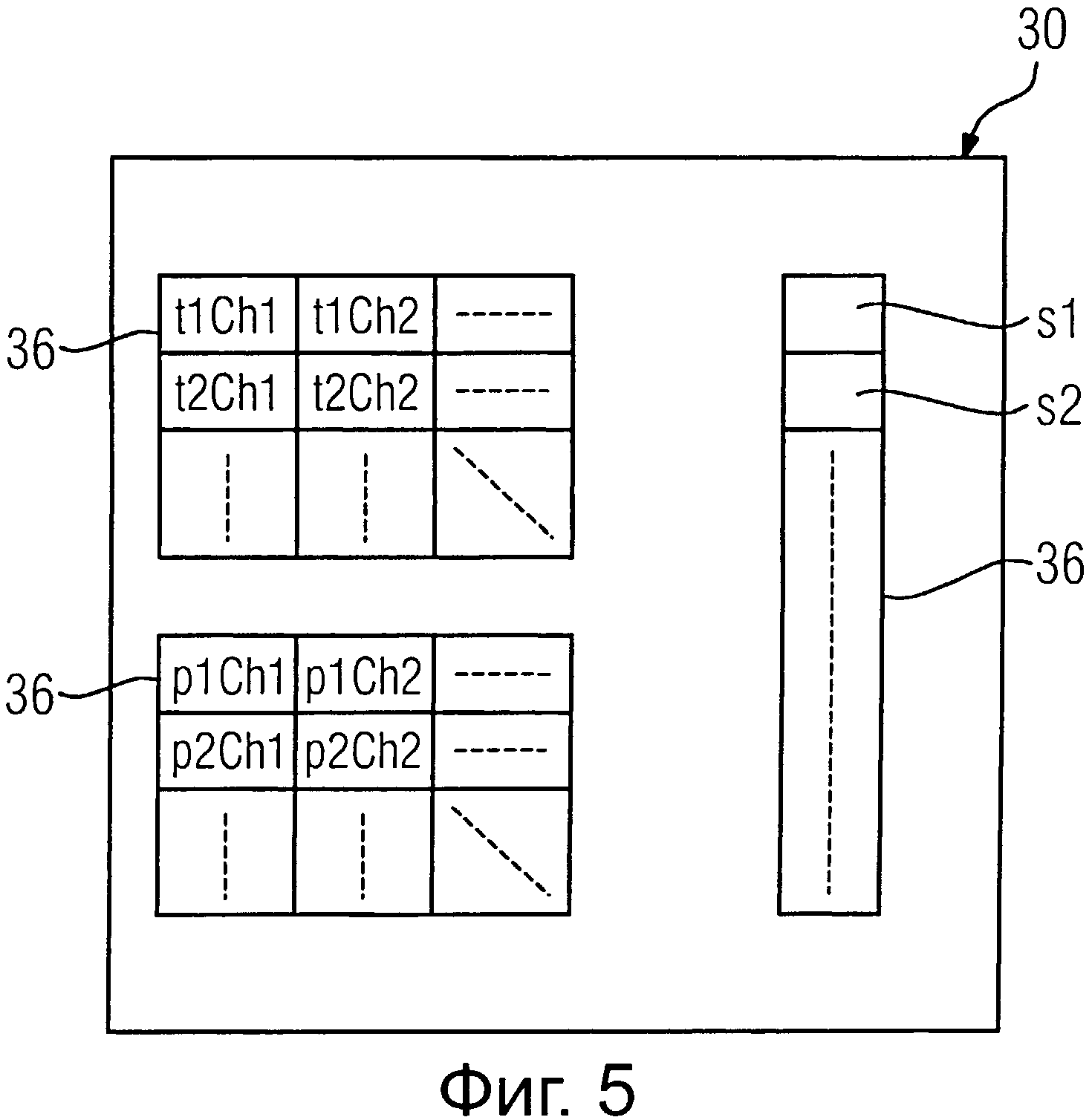
Фиг.5 - схематичное представление структуры памяти системы калибровки.
Система 1 BVTTM, как она используется, например, в паровой или газовой турбине (не показана) на электростанции (не показана), очень сложна и состоит из множества компонент, как показано на фиг. 1. Начиная с необработанных сигналов 2 датчика, которые подаются, чтобы запускать переключающую логику и усилители 4 сигналов, собранные во множестве датчиков в турбине, можно идентифицировать многочисленные факторы, которые сильно влияют на фактическую форму импульса и время задержки. Это зависит, главным образом, непосредственно от типа датчика (оптический, с вихревыми токами, магнитный или радиочастотный) и его внутренних временных характеристик домена, а также от взаимодействия с конкретным геометрическим контуром лопатки. В случае больших амплитуд вибрации или изменяющихся зазоров венцов эти параметры могут изменяться и могут стимулировать ложные временные задержки.
Для очень малых отрезков времени в диапазоне наносекунд при всестороннем и полном анализе влияния ошибок следует учесть множество эффектов. Не только поведение при передаче временных областей всех вовлеченных электронных компонент должно быть оценено, простая длина и тип сигнальных кабелей также важны. Переключаемая сигнальная логика или алгоритм вычисления времени прибытия также подвержены действию различных влияющих параметров. Разрешающая способность основной тактовой частоты системы и параметр аналого-цифрового преобразователя также могут оказать большое влияние на разрешающую способность амплитуды системы BVTTM.
Разрешающая способность амплитуды вибрации является прямой функцией реальной или виртуальной тактовой частоты системы, то есть того, насколько точно может быть измерено разложение времени прибытия. При типичных окружных скоростях 300-500 м/с в турбинах тактовая частота 83 МГц может напрямую дать разрешение с минимальной амплитудой вибрации приблизительно 5 микрон, что нельзя считать достаточным для некоторого обнаружения более высокого порядка для режима двигателя. Основная тактовая частота 83 МГц соответствует временному интервалу 12 нс.
Для подробного анализа основополагающих причин отказа, который позволяет отделить эффекты неопределенности от различных первопричин, необходимо проанализировать различные части цепочки измерения с помощью отдельных и специализированных инструментов и испытательных установок. До сих пор не существует описанных в литературе известных инструментов или процедур. Другим важным аспектом должна быть гарантия полной прослеживаемости соответствия международным стандартам измерений как временным или частотным нормам для всего устройства.
Однако самое важное воздействие на конечный результат события вибрации оказывает математический алгоритм реконструкции частот. Алгоритм содержит часть 6, действующую в реальном времени, и автономную часть 8. Алгоритм 6, действующий в реальном времени, обеспечивает быстро получаемые результаты на выходе 10 дисплея для контроля и включения тревоги в случае, если вибрации превышают эксплуатационные пределы безопасности. Полученные данные также хранятся в файле 12 данных, который затем оценивается автономным алгоритмом, чтобы обеспечить более сложные результаты 14. Так как эти алгоритмы являются скрытыми и не представляются в большинстве систем 1 BVTTM, на предшествующем уровне техники функциональность может быть оценена только посредством процесса, выполняемого на месте.
Зная об этой ситуации, был разработан следующий подход, основанный на идее калибровки системы 1 BVTTM. Внутри цепочки измерения были идентифицированы определенные моменты, позволяющие "ввести" искусственные сигналы или цифровую информацию. Если эти сигналы могут быть сформированы с известным содержанием, введение их в систему 1 BVTTM должно вызывать реакцию и приводить к результату 14, который может затем сравниваться с известным входным сигналом. Эти точки введения представлены на фиг. 2, показывающей систему 1 BVTTM, изображенную на фиг. 1, с дополнительным содержанием.
Система 16 калибровки, показанная на фиг. 2, способна формировать оптические и электрические импульсы в соответствии с различными образцами вибрации. Они подаются как на переключаемую логику, так и на усилители 4 сигнала и для выполнения алгоритма 6, действующего в реальном времени. Дополнительно, она обеспечивает цифровую информацию в качестве файлов 18 искусственных данных, чтобы ввести эти данные в автономный алгоритм 8 системы 1 BVTTM. С другой стороны, система 16 калибровки также обеспечивает функциональные возможности по считыванию захваченных файлов 12 данных измерений и воспроизведению импульсных последовательностей.
Очень сложный вопрос сигналов синхронизации венцов не позволяет обратиться к простым физическим и легкодоступным лабораторным стандартам в стандартной рабочей процедуре. Даже очень сложные и дорогие генераторы произвольных волн и образцов, существующие на предшествующем уровне техники, не способны формировать сигналы с требуемой гибкостью, точностью и длительностью последовательности. Могут создаваться только очень простые и ограниченные образцы импульсов, которые совершенно непригодны для использования в качестве сигналов калибровки для систем 1 последнего поколения измерения синхронизации венцов с многочисленными датчикам. На предшествующем уровне техники эти системы 1 BVTTM не могут поэтому полностью тестироваться и калиброваться внутри диапазона их специфического применения в отношении амплитуды, частоты и динамической характеристики вибрации лопаток.
Система 16 калибровки, показанная на фиг. 2 и более подробно на фиг. 3, может поддерживать процедуру "введения" сигнала, описанную выше, универсальным и гибким способом. Устройство характеризуется многочисленными каналами аппаратурных средств, заложенных в мощное программное обеспечение, и интуитивным графическим интерфейсом пользователя. Оно способно моделировать общие сценарии вибрации лопаток вращающейся газовой или паровой турбины.
С этой целью система 16 калибровки содержит специализированную плату 20 с шиной межсоединения периферийных компонент (PCI) для прикладных интегральных схем (ASIC), питающих программируемую логическую интегральную схему (FPGA), показанную на фиг. 3. На сегодня эти платы могут быть разработаны как 2- или 4-канальные платы и несколько PCI-плат 20 могут объединяться в многоканальные системы с 12 каналами. Пример на фиг.3 показывает одиночную PCI-плату 20 с четырьмя выходными соединителями 22 в блоке 24 выходного сигнала. PCI-плата соединяется через PCI-соединитель 26 с системой стандартного персонального компьютера (не показан).
PCI-плата 20 дополнительно содержит процессор 28 на FPGA и блок 30 с высокоскоростным динамическим запоминающим устройством с произвольной выборкой (DRAM). Все элементы соединяются посредством печатной схемы на PCI-плате 20. Процессор 28 характеризуется тактовой частотой 500 МГц, то есть разрешающей способностью 2 наносекунды. Тактовый генератор имеет точность 10 пикосекунд. Четыре канала выходных соединителей 22 синхронизируются и выводят аналоговые сигналы в форме электрических TTL-импульсов со временем фронта/спада примерно 0,5 наносекунд, преобразованных цифроаналоговым преобразователем 32, на блок 24 выходного сигнала. При желании форма импульса может быть сформирована небольшими конденсаторами, чтобы получить аналоговые сигналы, сформированные подобно сигналам датчиков.
Благодаря конкретному способу, реализованному в процессоре 28 и блоке 30 памяти, описанном ниже, PCI-плата 20 является совершенно гибкой и не имеет ограничений по форме импульса, не имеет ограничений по длительности импульсов и способна создавать последовательности импульсов с 4 миллионами импульсов на канал. Разрешающая способность по времени равна 2 наносекундам и позволяет формировать амплитуды вибраций с точностью ниже 0,1 микрона, в зависимости от скорости диска.
Как типичный пример тестирования, обычная последовательность ввода в действие газовой турбины с 15-минутной продолжительностью имеет приблизительно 30000 оборотов. Полагая, что имеются 50 лопаток в ряд, это приведет в результате к 1,5 миллионам импульсов, так что 4-миллионная производительность по импульсам достаточна, чтобы моделировать полные последовательности запуска и длительные режимы работы турбины. Эта характеристика очень важна для тестирования долгосрочной реакции системы 1 BVTTM.
Для оптических систем 1 BVTTM, которые должны быть тестированы, предлагается лазерный бустер 34 для преобразования электрических импульсов в пучки лазерного излучения различных длин волны. Это позволяет подавать цифровые импульсы с длиной волны 660 нм или 830 нм на переключаемую логику и усилители 4 сигналов (смотрите фиг. 2). Чтобы ввести цифровые данные в систему 1 BVTTM в автономном алгоритме 8, система 16 калибровки формирует файлы 18 искусственных данных с известным содержанием. Различными системами 1 BVTTM поддерживаются различные форматы файлов.
Во время разработки системы 16 калибровки особое внимание было уделено тому, чтобы позволить эффективное применение устройства во время процесса валидации системы 1 BVTTM. Поэтому была разработана общая последовательность выполнения операций. Процесс калибровки начинается с определения параметров машины, таких как количество лопаток, режим пакетирования лопаток и толщина лопаток. Это продолжается введением настройки измерений, то есть сколько датчиков должно быть присоединено и в каком положении по окружности.
Затем выбирается один из двух предоставленных основных режимов работы машины. Система 16 калибровки способна моделировать непрерывные или переходные режимы работы машины по скорости. Во время непрерывного режима (cw) скорость ротора остается постоянной или может быть немного модулирована, чтобы моделировать поведение контроллера скорости ротора. Амплитуда и частота модуляции скорости могут регулироваться в соответствии с известными свойствами цепочки привода турбины. Обычно амплитуды модуляции скорости находятся в диапазоне нескольких МГц в случае синхронизированной работы турбины, но тем не менее необходимо получить реальные сценарии вибрации. В противном случае переходный режим (tr) позволяет моделирование полного ввода в действие машины от холостого хода до номинальной скорости.
Ускорение ротора, то есть линейное нарастание скорости, выражается как функция зависимости скорости от времени, представляющая полином третьего порядка. Выбирая должным образом коэффициенты, могут моделироваться гибкие и нелинейные нарастания скорости.
Для поддержки эффективного использования системы 16 калибровки все эти многочисленные параметры могут сохраняться и повторно считываться в заданной электронной таблице в формате EXCEL. Формат EXCEL файла параметров настройки также позволяет независимую подготовку различных настроек тестирования и сценариев тестирования, не имея программного обеспечения калибровки. В частности, следующий этап в последовательности выполнения операций потребует сотни входных параметров, которые могут быть созданы и легко быть доступны посредством функциональной возможности перетаскивания в электронных таблицах EXCEL.
Чтобы определить режим вибрации лопаток, система 1 калибровки обеспечивает простые и очень сложные образцы вибраций, которые отличаются от режима cw и tr. Для режима cw режим вибрации лопаток характеризуется тремя группами образцов вибрации:
Образец А вибрации лопатки - простой режим, в котором все лопатки диска имеют одни и те же амплитуды и частоты вибрации и находятся в одной и той же фазе. Но до десяти режимов вибрации могут налагаться синхронно с различными частотами, амплитудами и фазами.
Образец В режима вибрации характеризуется назначением индивидуальной фазы каждой лопатке. Обнаружено, что это является хорошим признаком для моделирования явления синхронной вибрации лопаток и диска (образцы вибрации в виде ромашки).
Образец С режима вибрации позволяет полностью индивидуальное назначение лопаткам амплитуд, частот и фазы для всех десяти режимов вибраций.
Другой важной характеристикой реального тестирования BVTTM является формирование искаженных шумом сигналов вибрации лопаток. Все три образца вибрации для режима cw пригодны для наложения на желаемую амплитуду шумовой вибрации (белый шум). Для образца А вибрации амплитуда шума является специфической для режима, для образцов В и С она может выбираться индивидуально для каждой лопатки.
Переходный режим требует несколько большего количества параметров для моделирования действительного поведения машины. Во время ускорения ротора лопатки подвергаются возбуждающим силам в зависимости от текущей скорости. Если частота возбуждения совпадает с одной из собственных частот лопатки, возникает возбуждение режима вибрации. Это явление возбуждения характеризуется определенной максимальной амплитудой и показывает индивидуальную характеристику демпфирования, которая может быть описана функцией формирования огибающей. Используя симметричную кривую нормального распределения Гаусса, можно подогнать форму огибающей к желаемой характеристике демпфирования, которая должна моделироваться.
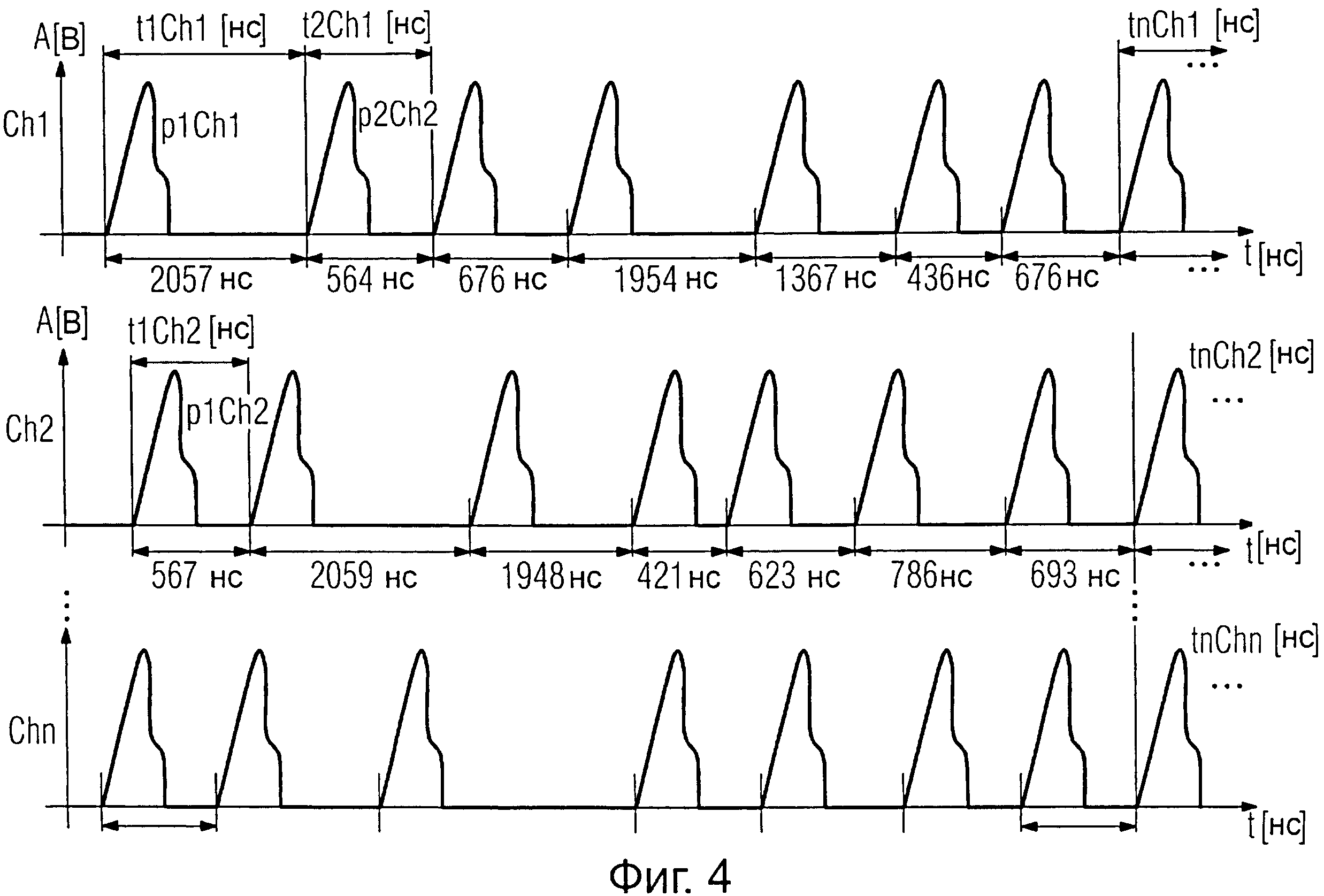
Когда упомянутые выше этапы закончены и образец вибрации лопатки был определен для калибровки системы 1 BVTTM, система 16 калибровки вычисляет сигналы 2 датчиков, которые определенный образец вибрации лопатки должен производить в заданной конфигурации датчиков BVTTM. Общий пример таких сигналов 2 датчиков показан на фиг. 4.
На фиг. 4 показан пример из n сигнальных каналов Ch1, Ch2… Chn, причем каждый канал Ch1, Ch2… Chn изображается графиком, показывающим зависимость амплитуды сигнала в вольтах от времени в наносекундах. Каждый канал Ch1, Ch2… Chn показывает количество импульсов со вставленными периодами нулевого сигнала. Хотя форма импульсов выглядит на фиг. 4 одинаковой, возможны произвольные образцы импульсов. Система 16 калибровки использует много заданных форм и каждый импульс имеет назначенный ему элемент идентификатора формы импульса p1ChI, p2Chl, p1Ch2 и т.д. (pXChY обозначает импульс Х канала Y). Время с начала импульса Х до начала следующего импульса в канале Y обозначается как tXChY и запоминается в элементах t1Ch1, t2Ch1, t1Ch2 и т.д. времени ожидания. Продолжительность последовательности ограничивается только объемом устройства хранения данных в блоке памяти для n номеров для элементов tXChY времени ожидания. Последовательность может периодически повторяться.
На фиг. 5 показано, как образцы импульсов, показанные на фиг. 4, запоминаются в блоке 30 памяти, чтобы иметь возможность их воспроизведения. В блоке 30 памяти хранятся три матрицы 36. Первая матрица 36 содержит n элементов s1, s2… sn формы импульса. Элементы формы импульса содержат последовательность амплитудных значений, формирующих определенную форму импульса. Вторая матрица 36 содержит элементы p1Ch1, p1Ch2, p2Ch1 и т.д. идентификатора формы импульса. Каждый элемент p1Ch1, p1Ch2, p2Ch1 идентификатора формы импульса содержит ссылку на один из заданных элементов s1, s2… sn формы импульса, например, p1Ch1 относится к элементу s2 формы импульса. Третья матрица 36 содержит элементы t1Ch1, t1Ch2, t2Ch1 и т.д. времени ожидания. Каждый элемент t1Ch1, t1Ch2, t2Ch1 времени ожидания содержит значение в наносекундах. Например, на фиг. 4 t1Ch1 содержит значение 2057, t2Ch2 содержит значение 564, соответственно.
Теперь процессор 28 считывает матрицы 36 параллельно для каждого канала, то есть p1Ch1 и t1Ch1 считывается первым для канала, Ch1, p1Ch2 и t1Ch2 считывается для канала Ch2 и так далее. Процессор 28 вызывает создание импульса, соответствующего элементу формы импульса, упомянутому в элементе идентификатора формы импульса, считываемом в блоке 24 выходного сигнала, например элемент s2 формы импульса для р1СЫ, и затем ждет в течение времени, считанного из первого элемента t1Ch1 времени ожидания, то есть 2057 не в канале Ch1. Это делается в каждом канале Ch1, Ch2… Chn, соответственно.
Далее, блок 24 выходного сигнала будет выводить нулевой сигнал в канале СН1 в течение длительности 2057 нс минус длительность импульса, соответствующую s2, ссылка на которую делается p1Ch1 без необходимости какого-либо доступа к памяти в течение этого времени. Время может быть легко преобразовано в циклы процессора на основе тактовой частоты 500 МГц в данном примере.
Это резко сокращает использование памяти и поэтому сокращает количество доступов к памяти и позволяет иметь длинные последовательности импульсов, требующиеся для системы 16 калибровки.
Транспортное средство с установкой водоснабжения и охлаждения
Турбинный аэродинамический профиль
Система управления
Рельсовое транспортное средство, снабженное устройством защиты от травмирования дверями
Дисковое тормозное устройство для рельсовых транспортных средств
Выдвижная подножка для рельсового транспортного средства
Гибкая транспортировочная упаковка
Приводной механизм для электрических коммутационных приборов с тремя отдельными положениями
Способ и устройство для контроля целостности поезда
Разделительное устройство для разделения смеси
Сплав, защитный слой и конструктивный элемент
Адаптивная активная катодная защита
Система и способ для заблаговременного распознавания повреждения в подшипнике
Способ и система для быстрого переключения резервного источника питания в множественном источнике питания
Регулировка воздушного зазора в гидравлической тормозной системе
Способ подсоединения по меньшей мере двух электрических кабелей, а также соединительное устройство, конструктивный узел, электрическая машина и соответствующее транспортное средство
Ускоритель и способ управления ускорителем
Тормозная система с интеллектуальным исполнительным механизмом для торможения рельсового транспортного средства
Высоковольтный источник постоянного напряжения и ускоритель частиц
Рельсовое транспортное средство, снабженное кожухом фронтального сцепного устройства

