Результат интеллектуальной деятельности: ОБНАРУЖИТЕЛЬ С КОМПЕНСАТОРОМ ПОМЕХ
Вид РИД
Изобретение
Изобретение относится к области радиотехники и может быть использовано в приемниках глобальных навигационных спутниковых систем, использующих широкополосные сигналы, манипулированные по фазе псевдослучайной последовательностью, установленных как на малоподвижных объектах, так и на объектах с высокой динамикой.
Наиболее близким по технической сущности к предлагаемому устройству является «Обнаружитель с компенсатором узкополосных помех», приведенный в литературе на рисунке 5.11 (Теория обнаружения сигналов / Под ред. П.А. Бакута. - М.: Радио и связь, 1984. - 440 с. С. 296), которое является устройством-прототипом.
Устройство-прототип состоит из последовательно соединенных вычитающего устройства, вход которого является входом обнаружителя, и обнаружителя навигационного сигнала, выход которого является выходом, сумматора, имеющего N входов, выход которого соединен со вторым входом вычитающего устройства, N каналов формирования копий помех, каждый из которых состоит из последовательно соединенных первого перемножителя, измерителя амплитуды, второго перемножителя, выход которого соединен с соответствующим входом сумматора, системы слежения за фазой, при этом вход системы слежения за фазой, вход первого перемножителя помехи объединены и являются входом устройства-прототипа.
Основным недостатком устройства-прототипа является низкая вероятность обнаружения навигационного сигнала при использовании данного устройства на объектах, имеющих большую скорость перемещения.
Технический результат изобретения достигается тем, что в обнаружителе с компенсатором помех, состоящем из вычитающего устройства, обнаружителя навигационного сигнала, i каналов формирования помехи, где  имеющих первый перемножитель, второй перемножитель, измерителя амплитуды, систему слежения за фазой формирователя копии, дополнительно в каждый канал формирования копии помехи введены третий перемножитель, обнаружитель помехи, система слежения за задержкой, формирователь копии помехи.
имеющих первый перемножитель, второй перемножитель, измерителя амплитуды, систему слежения за фазой формирователя копии, дополнительно в каждый канал формирования копии помехи введены третий перемножитель, обнаружитель помехи, система слежения за задержкой, формирователь копии помехи.
Сущность изобретения поясняется рисунком.
На фиг. 1 показана структурная схема обнаружителя с компенсатором помех.
Обнаружитель с компенсатором помех состоит из i каналов формирования копии помехи, где  сумматора 7, вычитающего устройства (ВУ) 8, обнаружителя навигационного сигнала (ОНС) 9.
сумматора 7, вычитающего устройства (ВУ) 8, обнаружителя навигационного сигнала (ОНС) 9.
I-й канал формирования копии помехи, рассмотрим на примере 1-го канала, состоит из первого перемножителя 1-1, второго перемножителя 1-2, третьего перемножителя 1-3, измерителя амплитуды (ИА) 2, формирователя копии помехи (ФКП) 3, системы слежения за фазой (ССФ) 4, системы слежения за задержкой (ССЗ) 5, обнаружителя помехи (ОП) 6.
Вход i-го канала формирования помехи соединен с ВХОДОМ, а выход соединен с i-м входом сумматора 7. Выход сумматора 7 соединен со вторым входом ВУ 8. Первый вход ВУ 8 соединен с ВХОДОМ, а выход соединен с входом ОНС 9.
Блоки, входящие в канал формирования помехи, имеют следующую взаимосвязь.
Первый вход первого перемножителя 1-1 соединен с ВХОДОМ, второй вход соединен с выходом ССФ 4, а выход соединен с входом ИА 2 и со вторым входом ССЗ 5. Выход ИА 2 соединен со вторым входом второго перемножителя 1-2. Первый вход второго перемножителя 1-2 соединен с выходом ССФ 4, а выход второго перемножителя 1-2 соединен с первым входом ФКП 3. Первый вход третьего перемножителя 1-3 соединен с ВХОДОМ, второй вход соединен с выходом ССЗ 5, а выход соединен с ССФ 4. Вход ОП 6 соединен с ВХОДОМ, а выход соединен с первым входом ССЗ 5, выход которого соединен со вторым входом третьего перемножителя 1-3 и со вторым входом ФКП 3, у которого выход соединен с i-м входом сумматора 7.
Обнаружитель с компенсатором помех работает следующим образом.
На вход обнаружителя поступает аддитивная смесь навигационного сигнала и помех. Если в аддитивной смеси навигационного сигнала и помех присутствует сигналоподобная помеха с параметрами, которые соответствуют параметрам ОП 6 i-го канала формирования копии помехи, то на его выходе формируется напряжение, которое поступает на первый вход ССЗ 5. На второй вход ССЗ 5 с выхода первого перемножителя 1-1 поступает огибающая сигналоподобной помехи с известными параметрами. На выходе ССЗ 5 получается копия огибающей помехи, синхронная по времени задержки с огибающей обнаруженной сигналоподобной помехи. С выхода ССЗ 5 копия огибающей помехи поступает на второй вход третьего перемножителя 1-3 и на второй вход ФКП 3.
Используемый обнаружитель помехи 6 и система слежения за задержкой 5 повышают эффективность определения задержки ПСП помехи.
Обнаружитель помехи 6 представляет собой обнаружитель широкополосного фазоманипулированного сигнала с известным законом формирования ПСП. При наличии на входе обнаружителя помехи 6 сигналоподобной помехи, закон формирования ПСП которой совпадает с опорной ПСП, происходит процедура поиска по задержке. При этом поиск заключается в последовательном просмотре ячеек k=1, m на области неопределенности сигнала. В ходе проверки каждой ячейки вычисляется интеграл взаимной корреляции принятой и опорной ПСП сигналоподобной помехи, затем вычисленное значение сравнивается с порогом. Если порог не превышен, то обнаружитель переходит к анализу следующей k+1 ячейки. В случае превышения порога выносится решение о наличии в канале сигнала с текущей задержкой ПСП. При этом на выходе обнаружителя помехи 6 формируется сигнал «грубой оценки задержки» ПСП, который поступает на первый вход ССЗ 5.
ССЗ 5 представляет собой систему слежения за задержкой для сигнала с флуктуирующей скоростью изменения задержки, которая работает следующим образом.
На второй вход ССЗ 5 поступает с выхода первого перемножителя 1-1 поступает огибающая сигналоподобной помехи. При этом в ССЗ 5 происходит захват ПСП помехи на слежение. Сигнал «грубой оценки задержки» ПСП, поступающий на первый вход ССЗ 5, используется с целью настройки в ССЗ 5 генератора опорной ПСП для улучшения условий захвата ПСП помехи на слежение. Тогда с выхода ССЗ 5 снимается ПСП, синхронная с ПСП сигналоподобной помехи.
В третьем перемножителе 1-3 происходит снятие фазовой манипуляции с обнаруженной сигналоподобной помехи, и в результате на выходе третьего перемножителя 1-3 получаем узкополосный гармонический сигнал, которой поступает на вход ССФ 4. В системе слежения за фазой ССФ 4 после захвата входного сигнала на ее выходе формируется гармонический сигнал, синхронный по фазе с обнаруженной сигналоподобной помехой. Этот сигнал поступает на второй вход первого перемножителя 1-1 и на первый вход второго перемножителя 1-2. На выходе первого перемножителя 1-1 получается огибающая обнаруженной сигналоподобной помехи, которая поступает на второй вход системы ССЗ 5, что позволяет ей работать с низкочастотным видеосигналом, а также на вход ИА 2, где формируется напряжение, соответствующее значению амплитуды обнаруженной сигналоподобной помехи, которое с выхода ИА 2 поступает на второй вход второго перемножителя 1-2. На выходе второго перемножителя 1-2 в результате перемножения формируется гармонический сигнал, синхронный по фазе с обнаруженной сигналоподобной помехой и равный с ней по амплитуде, который поступает на первый вход ФКП 3.
В формирователе копии помехи 3 происходит манипуляция по фазе гармонического сигнала, синхронного по фазе с обнаруженной сигналоподобной помехой и равного с ней по амплитуде, синхронной по времени задержки копией огибающей помехи, поступающей с выхода ССЗ 5. Тогда на выходе ФКП 3 получается синхронная по времени задержки копия помехи, параметры которой совпадают с обнаруженной сигналоподобной помехой. Сформированная копия обнаруженной сигналоподобной помехи с выхода ФКП 3 поступает на i-й вход сумматора 7. В сумматоре 7 происходит сложение L обнаруженных копий сигналоподобных помех, поступающих с выходов соответствующих каналов формирования копий помех. С выхода сумматора 7 сумма L копий обнаруженных сигналоподобных помех поступает на второй вход ВУ 8, где из входной аддитивной смеси навигационного сигнала и суммы L сигналоподобных помех происходит вычитание суммы соответствующих копий обнаруженных сигналоподобных помех.
В результате вычитания происходит компенсация соответствующей сигналоподобной помехи, что приводит к увеличению отношения сигнал/помеха на входе ОНС 9, что в свою очередь, приводит к увеличению вероятности обнаружения навигационного сигнала и повышению помехоустойчивости приемника глобальных навигационных спутниковых систем.
Обнаружитель с компенсатором помех, состоящий из вычитающего устройства, обнаружителя навигационного сигнала, i каналов формирования помехи, где имеющих первый перемножитель, второй перемножитель, измерителя амплитуды, системы слежения за фазой формирователя копии, отличающийся тем, что в каждый канал формирования копии помехи введены третий перемножитель, обнаружитель помехи, система слежения за задержкой, формирователь копии помехи, соединенные между собой в последовательности: вход i-го канала формирования помехи соединен с входом, а выход соединен с i-м входом сумматора, выход сумматора соединен со вторым входом вычитающего устройства, первый вход вычитающего устройства соединен с входом, а выход соединен с входом обнаружителя навигационного сигнала, в канале формирования помехи первый вход первого перемножителя соединен с входом, второй вход соединен с выходом системы слежения за фазой, выход соединен с входом измерителя амплитуды и со вторым входом системы слежения за задержкой, выход измерителя амплитуды соединен со вторым входом второго перемножителя, первый вход второго перемножителя соединен с выходом системы слежения за фазой, выход второго перемножителя соединен с первым входом формирователя копии помех, первый вход третьего перемножителя соединен с входом, второй вход соединен с выходом системы слежения за задержкой, выход соединен с системой слежения за фазой, вход обнаружителя помехи соединен с входом, выход соединен с первым входом системы слежения за задержкой, имеющей выход, соединенный со вторым входом третьего перемножителя и со вторым входом формирователя копии помехи, имеющего выход, соединенный с i-м входом сумматора.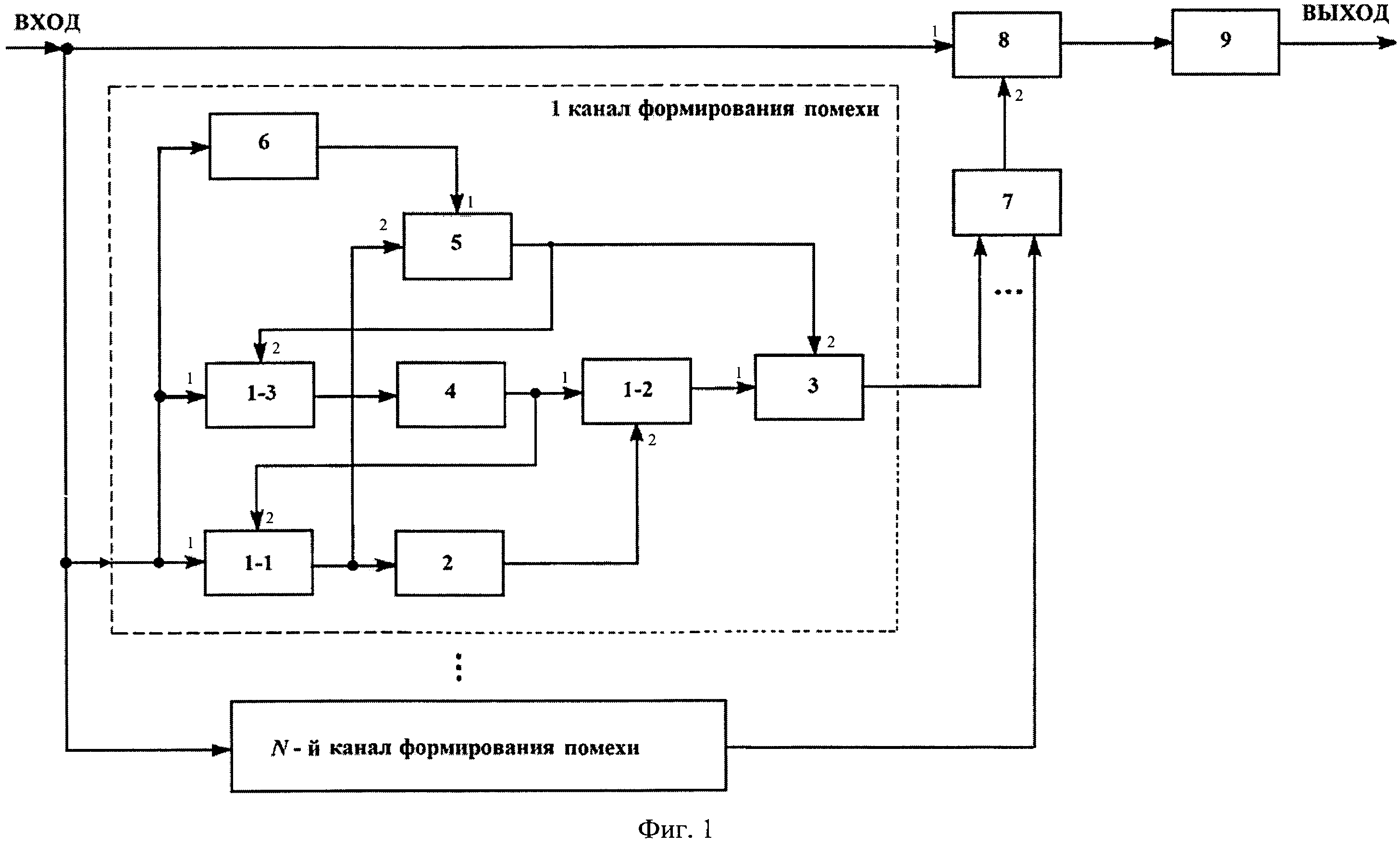
Устройство быстрой установки и снятия антенны
Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования
Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех
Радиопередающее устройство наземной радионавигационной станции длинноволнового диапазона, обеспечивающее формирование и сложение стандартного сигнала и сигнала повышенной точности для определения координат потребителей
Устройство для определения направлений на источники радиоизлучения
Способ управления автономной системой электроснабжения космического аппарата
Способ пространственной селекции расстояний при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе
Способ повышения точности дифференциальной коррекции навигационных параметров в длинноволновой системе определения местоположения
Способ выпекания теста
Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы
Способ эксплуатации никель-водородной аккумуляторной батареи в автономной системе электропитания искусственного спутника земли
Способ обнаружения преднамеренных помех нап гнсс
Устройство обнаружения источников ложных навигационных сигналов нап гнсс
Устройство пространственной селекции сигналов с компенсацией преднамеренных помех
Адаптивная антенная система для панорамного радиоприемника
Устройство компенсации преднамеренных радиопомех нап гнсс
Активная передающая антенная система радиоподавления низкоорбитальных спутников-ретрансляторов системы связи
Способ улучшения разрешающей способности корреляционных методов пеленгации
Способ расчета трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности

