Результат интеллектуальной деятельности: ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА
Вид РИД
Изобретение
Изобретение относится к оптическому приборостроению и может быть использовано для больших телескопов с альт-азимутальной монтировкой.
Известны различные типы монтировок оптических телескопов (Оптические телескопы. Теория и конструкция. Михельсон Н.Н., Главная редакция физико-математической литературы изд-ва «Наука», 1976, с. 336-358).
Известно опорно-поворотное устройство (ОПУ), используемое в конструкции шестиметрового телескопа БТА (см. упомянутую книгу с. 354-356, 407-408). Опорно-поворотное устройство изготовлено по проекту заявителя предлагаемого изобретения. Известное устройство содержит основание, образованную платформой с двумя стойками вилку с полым штырем, установленную на основании с возможностью поворота вокруг азимутальной оси, причем штырь выполнен со сферической цапфой, средник с оптическим блоком, установленный в вилке с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг упомянутых осей, регулировочную радиальную подшипниковую опору штыря, закрепленную на упомянутом основании. Телескоп имеет альт-азимутальную монтировку. Для обеих осей вращения применены гидростатические подшипники. Вращение вокруг азимутальной оси осуществляется посредством сферической цапфы, опирающейся на шесть гидростатических опор. К сферической цапфе штыря прикреплена круглая горизонтальная платформа с двумя стойками, образующими вертикальную вилку. На нижнем конце полого штыря закреплено червячное колесо привода вращения. Нижний конец штыря снабжен также регулировочной подшипниковой радиальной опорой, обеспечивающей точную установку азимутальной оси вращения вилки (эта радиальная опора защищена авт. св. SU 164142, G02D, 1962). Регулировочная подшипниковая радиальная опора содержит подшипники качения, наружная обойма которых соединена с основанием оптического устройства посредством трех шарнирных звеньев, два из которых образуют параллелограмм, а третье ограничивает подвижность этого параллелограмма. Радиальная установка штыря осуществляется продольным перемещением звеньев путем поворота посредством самотормозящихся червячных пар эксцентриковых осей, соединяющих звенья с основанием. Узлы вращения вокруг горизонтальной оси, выполненные в виде гидростатических подшипников с двумя самоустанавливающимися подушками, смонтированы на консольных балках вилки, входящих внутрь средника с оптическим блоком. Для этого в противоположных стенках средника в местах опоры на подшипники выполнены сферические поверхности. Вращение вокруг горизонтальной оси осуществляется с помощью червячного колеса, закрепленного на среднике с оптическим блоком. Каждая из двух стоек вилки снабжена кронштейнами для установки в них спектральной и прочей светоприемной аппаратуры. Внутри одной из стоек размещен спектрограф «квази-кудэ», участвующий вместе с телескопом в азимутальном вращении. Световой луч к оптической аппаратуре направляется посредством последовательно установленных отражающих элементов.
Однако известное устройство не предполагает обеспечения слежения за быстродвижущимися объектами, что обусловлено массогабаритными характеристиками устройства, а также использованием в приводах вращения червячных передач, целевые характеристики которых (например, жесткость) не отвечают требованиям, предъявляемым к точности наведения и плавности слежения за быстродвижущимися объектами. Кроме того, изготовление червячных передач, используемых в электромеханических приводах известного устройства, требует прецизионного оборудования и обуславливает относительно высокие затраты на изготовление и обслуживание телескопа. Вместе с этим, вследствие использования гидростатических опор для обеих осей наведения, устройство является достаточно сложным.
Известны ОПУ квазиоптических устройств, содержащие неподвижное основание, образованную платформой с двумя стойками вилку с полым штырем, установленную на основании с возможностью поворота вокруг азимутальной оси, качающуюся часть с квазиоптической системой, установленную с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг упомянутых осей, последовательно установленные отражающие элементы и приемо-передающую аппаратуру (W. Schonbach, Die Stahlkonstruktionen der verschiedenen Systeme qrosser Parabolantennen. Der Stahlban. vol 48, №10, 1979, c. 296-305, рис. 15). Узлы вращения качающейся части выполнены в виде трубчатых полуосей, входящих внутрь соответствующих подшипниковых опор, закрепленных на стойках вилки. Последовательно установленные отражающие элементы образуют лучевод, ось предпоследнего участка которого совмещена с угломестной осью вращения.
Однако в сравнении с оптическими телескопами известные квазиоптические устройства не требуют обеспечения точного положения азимутальной оси, и в них не предусматриваются средства для регулирования вертикальности азимутальной оси.
Известно ОПУ циркуляционного насосного агрегата ядерной энергетической установки, которое для уменьшения осевой силы, действующей на подшипниковую опору, содержит электромагнитное разгрузочное устройство (RU 2406878 С1, F04D 29/041, 2010). Электромагнитное разгрузочное устройство (ЭМРУ) включает неподвижный электромагнит и разгрузочный диск, закрепленный на валу лопастного насоса, ортогонально геометрической оси этого вала. Электромагнит образуют кольцевой магнитопровод и кольцевая электрическая катушка, установленная в кольцевой полости магнитопровода. На внешней боковой поверхности магнитопровода с помощью разъемного соединения выполнен холодильник электромагнита. Торцевые поверхности разгрузочного диска и электромагнита, обращенные друг к другу, разделены воздушным зазором, открытым в окружающее насос пространство.
Однако известное устройство имеет ограниченную область использования и не предполагает обеспечения возможности контроля и управления величиной разгрузки подшипниковой опоры.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является ОПУ телескопа, приведенное в описании изобретения по патенту RU 2166783 С2 (G02В 23/16, 2001). Известное ОПУ содержит основание, образованную платформой с двумя стойками вилку с полым штырем, установленным на основании с возможностью поворота вокруг азимутальной оси, причем штырь выполнен со сферической пятой (концевой цапфой), средник с оптическим блоком, установленный в вилке с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг упомянутых осей, регулировочную радиальную подшипниковую опору штыря, закрепленную на основании, последовательно установленные отражающие элементы и оптическую аппаратуру. Последовательно установленные отражающие элементы образуют два лучевода с общим начальным участком, ось которого совмещена с азимутальной осью вращения. При этом ось предпоследнего участка каждого лучевода совмещена с угломестной осью вращения. Каждый привод вращения содержит моментный двигатель, включающий статор и ротор. Узлы вращения средника с оптическим блоком выполнены в виде прикрепленных к среднику трубчатых полуосей, входящих внутрь соответствующих подшипниковых опор, закрепленных на стойках вилки. Одна из упомянутых трубчатых полуосей выполнена с образованием свободного конца, который с помощью разъемного соединения соединен с ротором моментного двигателя, статор которого консольно соединен с соответствующей стойкой вилки. Сферическая пята (концевая цапфа) выполнена на нижнем конце штыря с возможностью взаимодействия с подпятником, установленным на основании. Регулировочная радиальная подшипниковая опора штыря расположена в верхней части последнего. Полый штырь через переходник с помощью разъемного соединения соединен с ротором другого моментного двигателя, статор которого соединен с основанием через упомянутую радиальную подшипниковую опору штыря. Через штырь пропущен кабелепереход с вилки на основание. Кабелепереход выполнен с возможностью прохождения оптического луча вдоль азимутальной оси вращения к оптической аппаратуре, размещенной на основании оптического устройства. Между основанием оптического устройства и платформой, а также между вилкой и одной трубчатой полуосью средника установлены устройства фиксации взаимного положения.
Такая конструкция альт-азимутальной монтировки с безредукторными приводами наведения, снабженными моментными двигателями, установленными непосредственно на осях наведения, позволяет существенно повысить общую жесткость устройства и частотные характеристики монтировки до 15-25 Гц, а следовательно, повысить точность наведения. Особенности выполнения узлов вращения вокруг азимутальной оси позволяют уменьшить момент сопротивления вращению вилки, что дает возможность использовать безредукторный привод наведения с моментным двигателем. При этом узел вращения вилки, воспринимающий осевые нагрузки, выполнен с минимально возможными размерами по диаметру, благодаря чему уменьшается момент сопротивления вращению вилки и обеспечивается возможность использования для азимутальной оси моментного двигателя сравнительно небольшой мощности. Благодаря фиксации взаимоподвижных частей монтировки поворотные части устройства на любом рабочем угле удерживаются от поворота при воздействии внешних факторов, например ветра, и в случае обесточивания моментного двигателя.
Недостатком известного устройства является чрезмерная нагруженность концевой подшипниковой опоры штыря вилки (т.е. вала азимутальной оси) вследствие большой массы вращающейся части телескопа, что негативно сказывается на точности наведения оптического блока и плавности слежения при движении телескопа с ползучей скоростью.
Задачей настоящего изобретения является создание опорно-поворотного устройства, обеспечивающего повышение точности наведения и плавности слежения большого по астрономическим меркам оптического устройства с альт-азимутальной монтировкой.
Эта задача решается благодаря тому, что в известном ОПУ телескопа, содержащем основание, вилку с полым штырем, установленную на основании с возможностью поворота относительно азимутальной оси, привод вращения относительно упомянутой оси, причем штырь установлен посредством закрепленной на основании регулировочной радиальной подшипниковой опоры, расположенной в верхней части штыря, и концевой подшипниковой опоры, расположенной в нижней части штыря, при этом последняя соединена со сферической пятой, взаимодействующей с подпятником, установленным на основании, согласно изобретению, концевая подшипниковая опора соединена со сферической пятой с возможностью ограниченного перемещения вдоль продольной оси, которая геометрически совмещена с азимутальной осью. При этом ОПУ снабжено электромагнитным разгрузочным устройством (ЭМРУ) с возможностью обеспечения заданной разгрузки концевой подшипниковой опоры в осевом направлении и системой контроля и управления величиной разгрузки концевой подшипниковой опоры, которая включает тензометрические весоизмерительные датчики, установленные на сферической пяте и контактирующие каждый с соответствующим ответным упором, закрепленным на корпусе концевой подшипниковой опоры.
Вместе с этим корпус концевой подшипниковой опоры соединен со сферической пятой посредством мембран, которые расположены в плоскости, ортогональной азимутальной оси, и установлены равномерно по окружности относительно последней.
Кроме того, ЭМРУ включает электромагнит и разгрузочный диск. Электромагнит закреплен снизу на сферической пяте посредством пропущенного через подпятник первого трубчатого элемента. Разгрузочный диск выполнен с центральным отверстием и закреплен на полом штыре посредством второго трубчатого элемента, который с радиальным зазором пропущен через первый трубчатый элемент. Причем разгрузочный диск установлен ортогонально продольной оси второго трубчатого элемента, которая геометрически совмещена с азимутальной осью. При этом электромагнит включает кольцевой магнитопровод, в кольцевой выемке которого размещена по меньшей мере одна кольцевая электрическая катушка. Торцевые поверхности разгрузочного диска и электромагнита, обращенные друг к другу, при выключенном электромагните расположены с заданным воздушным зазором.
В последнем варианте выполнения первый и второй трубчатые элементы могут быть выполнены из титанового сплава.
Вместе с этим тензометрические весоизмерительные датчики расположены равномерно по окружности относительно азимутальной оси и установлены каждый посредством соответствующего первого опорного элемента.
Кроме того, на сферической пяте могут быть установлены вторые опорные элементы, контактирующие каждый с соответствующим ответным упором, закрепленным на корпусе концевой подшипниковой опоры. Причем первые и вторые опорные элементы расположены через один равномерно по окружности относительно азимутальной оси.
В другом варианте выполнения ОПУ содержит средства для обеспечения желаемой (заданной) высоты соответственно первых и вторых опорных элементов.
В варианте выполнения ОПУ содержит устройство для регулировки вертикальности азимутальной оси вращения вилки, включающее снабженные винтовыми механизмами Г-образные прижимы, которые установлены на подпятнике, расположены равномерно по окружности по периферии последнего и в плане (т.е. на виде сверху) частично перекрывают сферическую пяту с возможностью взаимодействия с ответной поверхностью этой пяты посредством самоустанавливающихся опорных элементов, которыми снабжены винты винтовых механизмов.
Вместе с этим ОПУ содержит систему местной вытяжной вентиляции для отвода тепла от ЭМРУ.
Технический результат использования изобретения состоит в том, что оно позволяет повысить точность и плавность вращения ОПУ телескопа относительно азимутальной оси, что, в конечном счете, обеспечивает повышение точности наведения большого по астрономическим меркам телескопа при обеспечении слежения с ползучей скоростью.
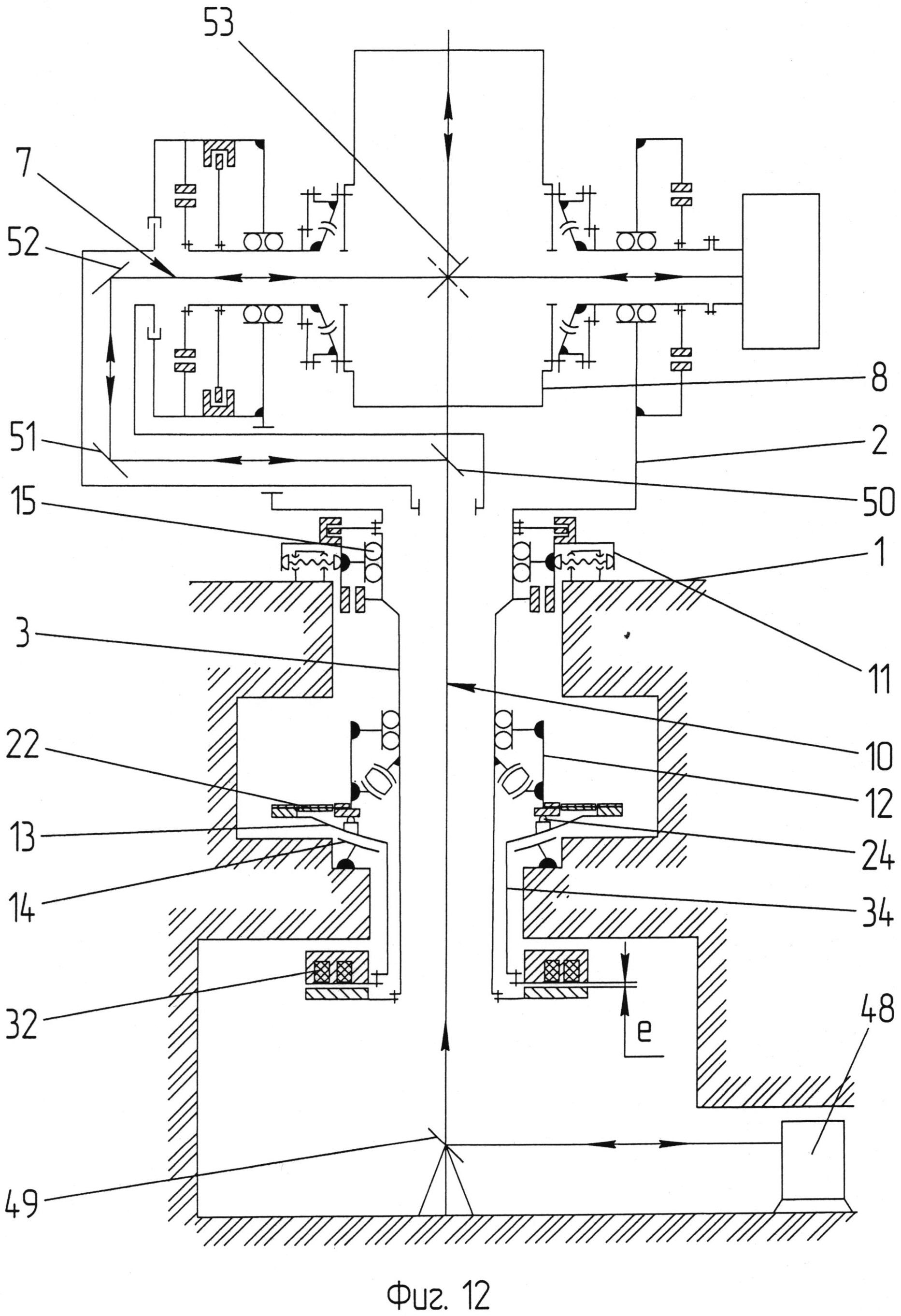
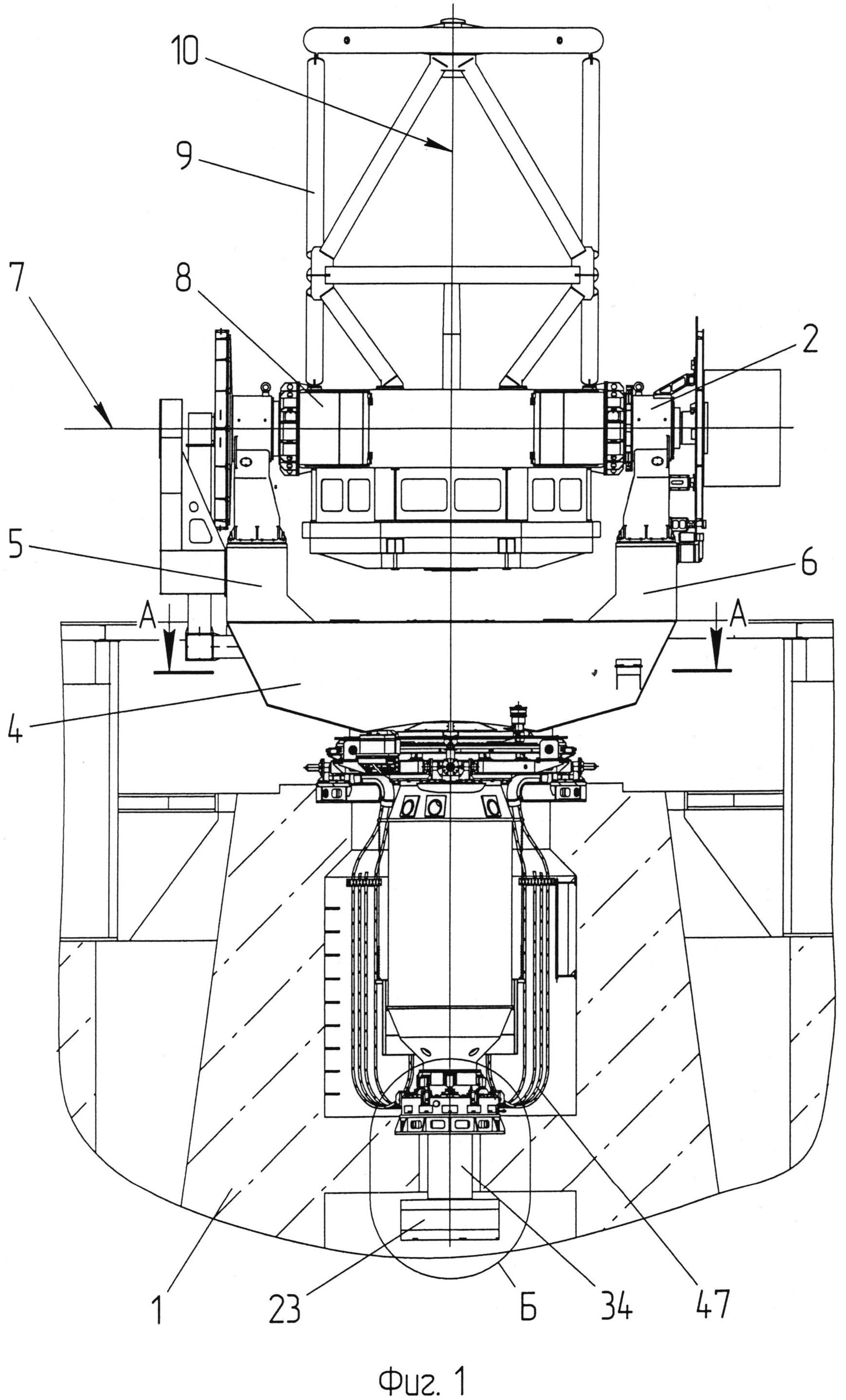
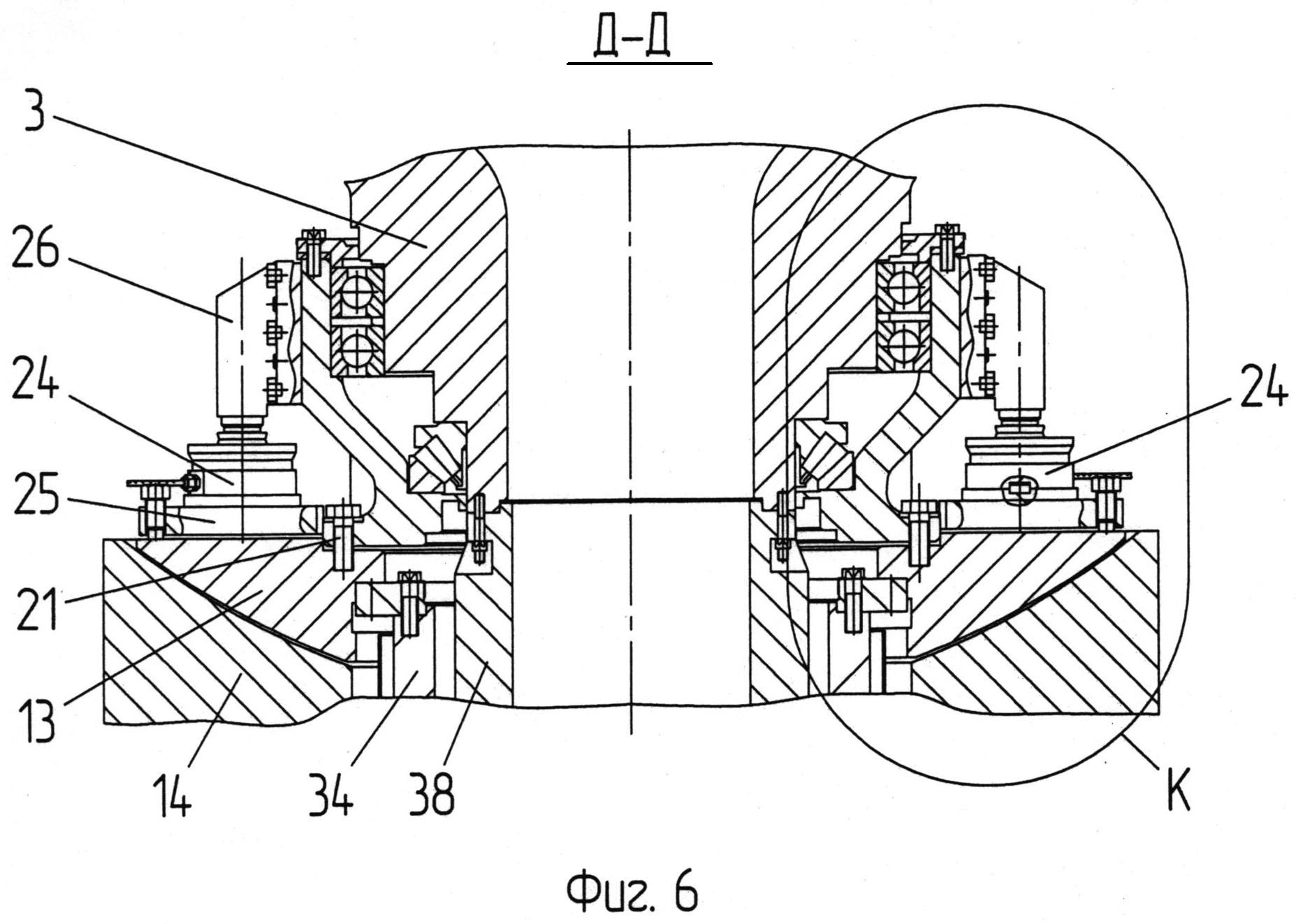
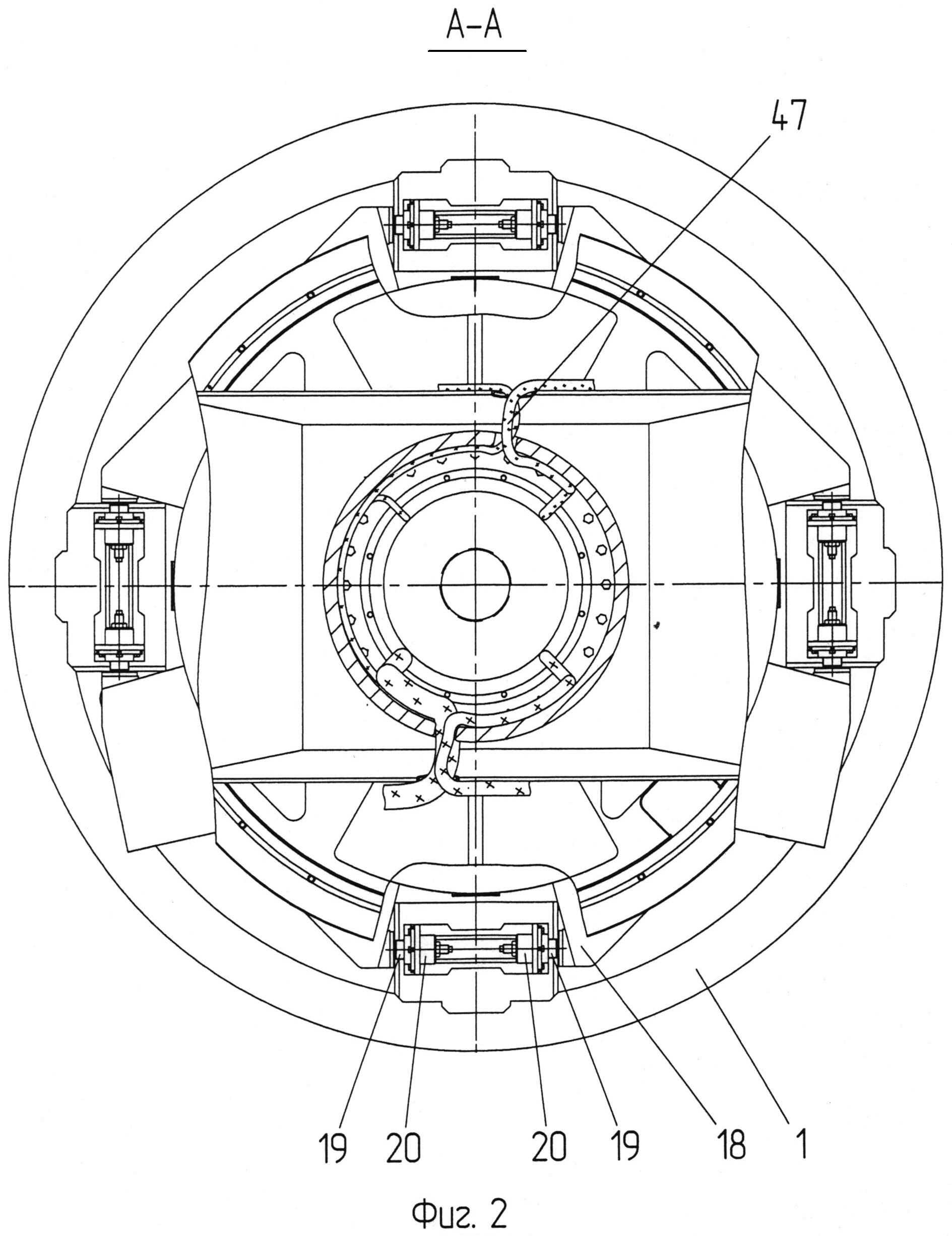
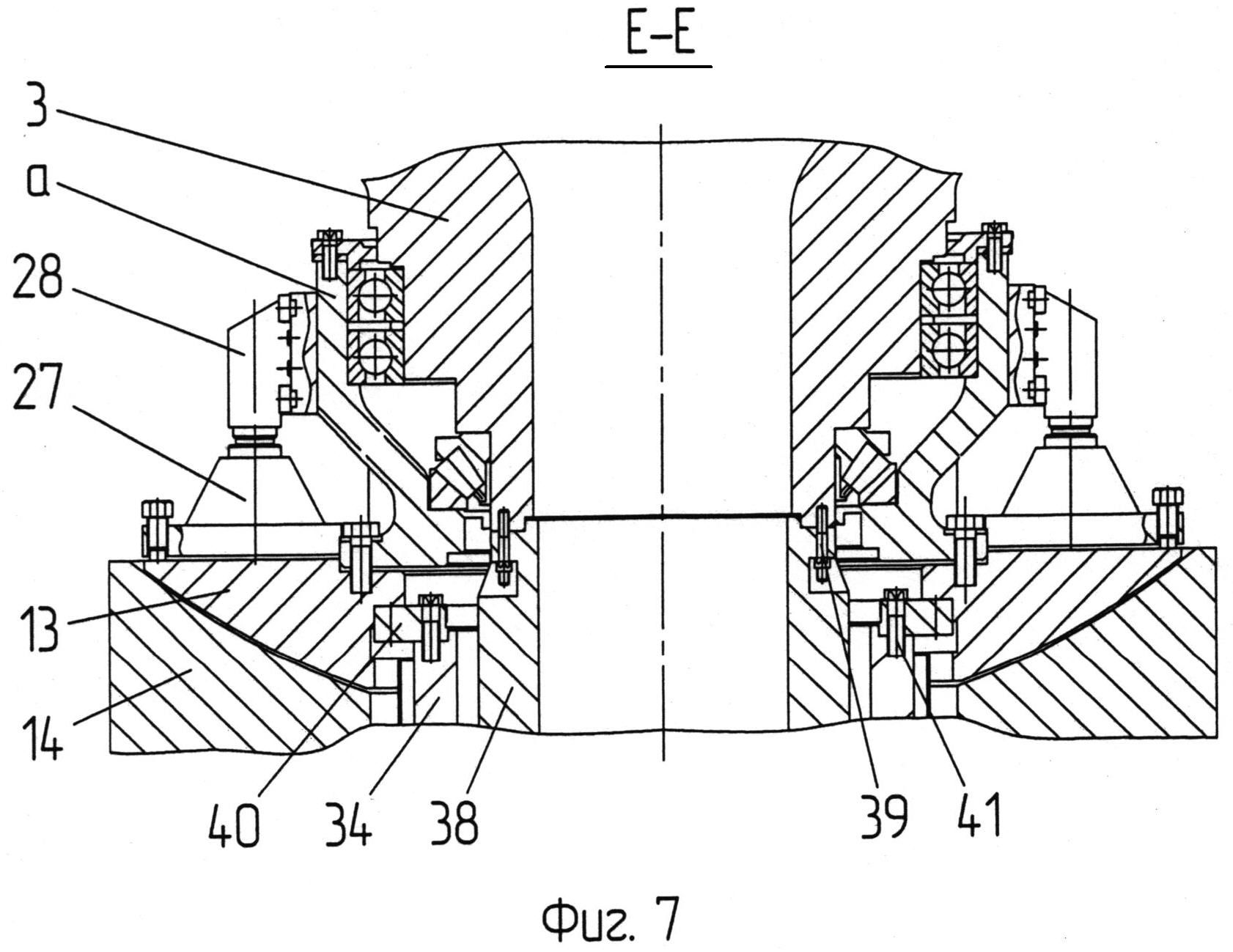
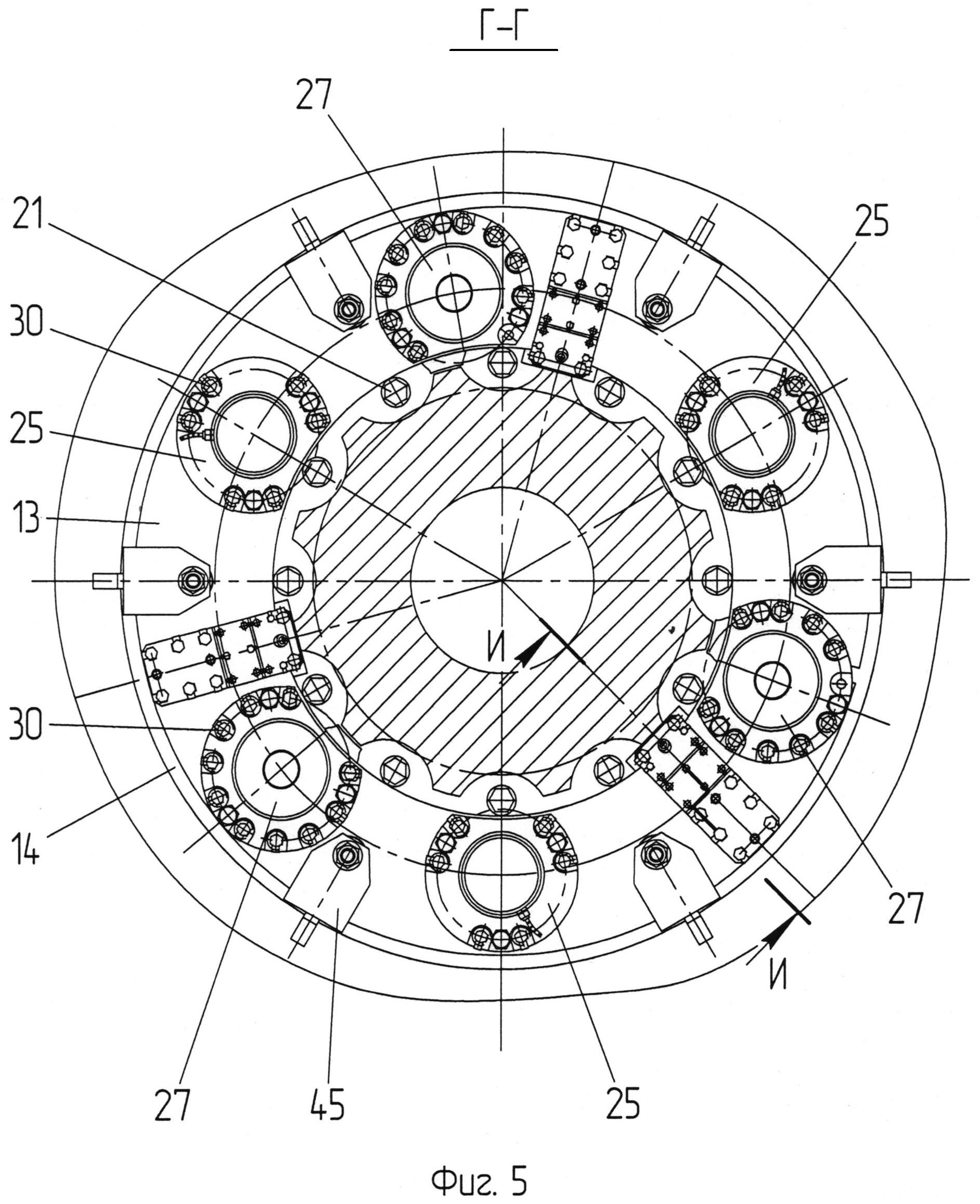
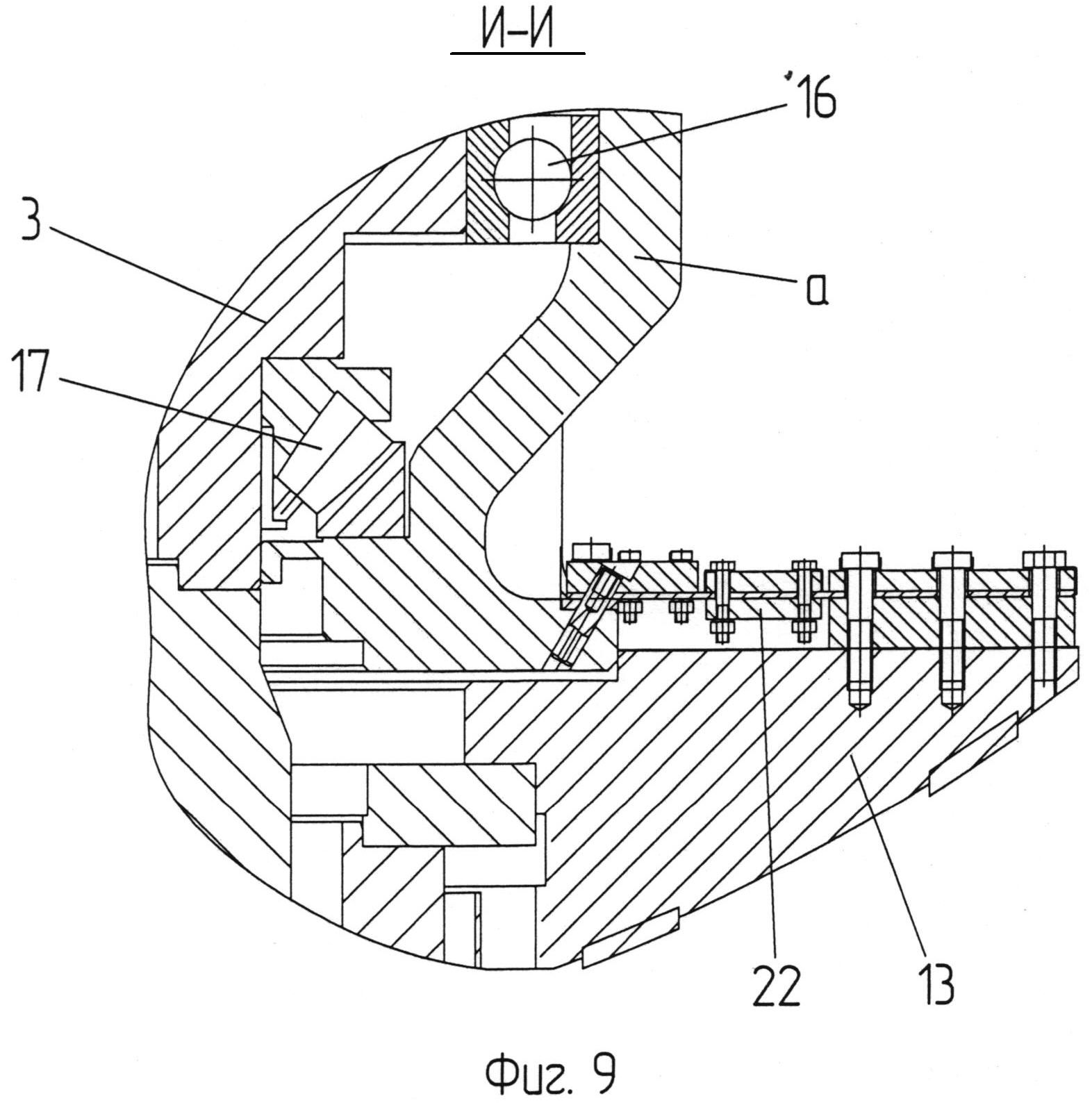
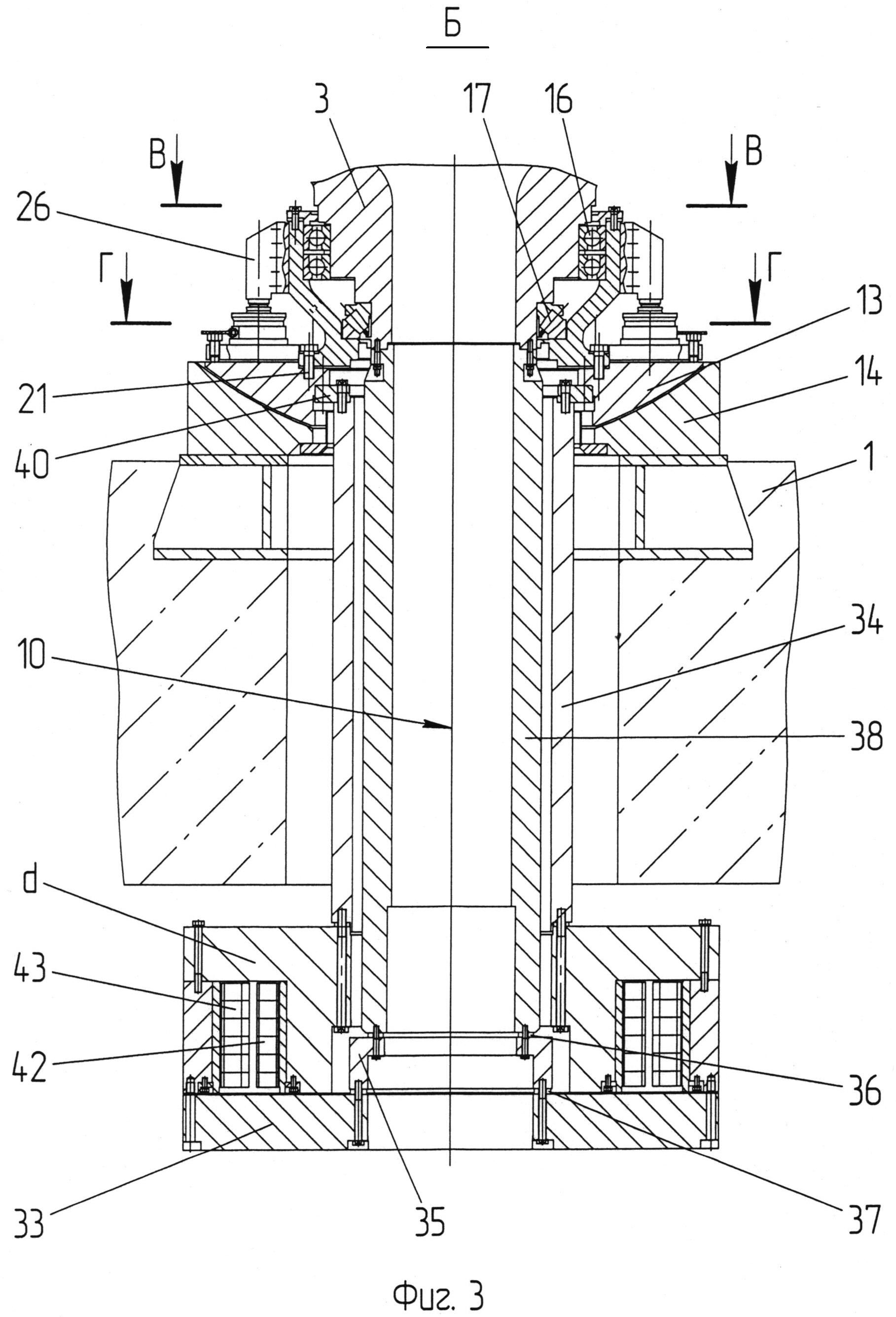
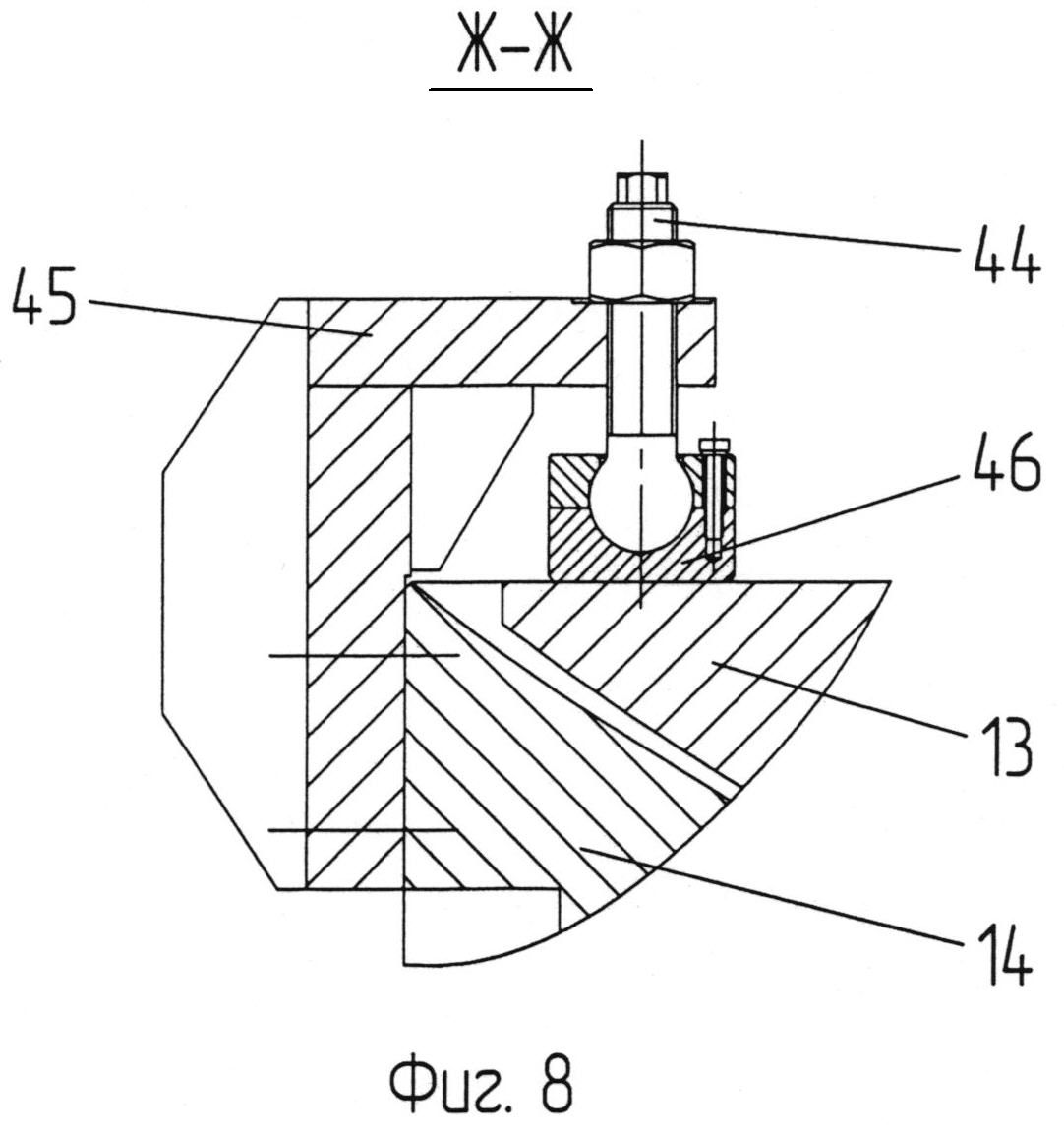
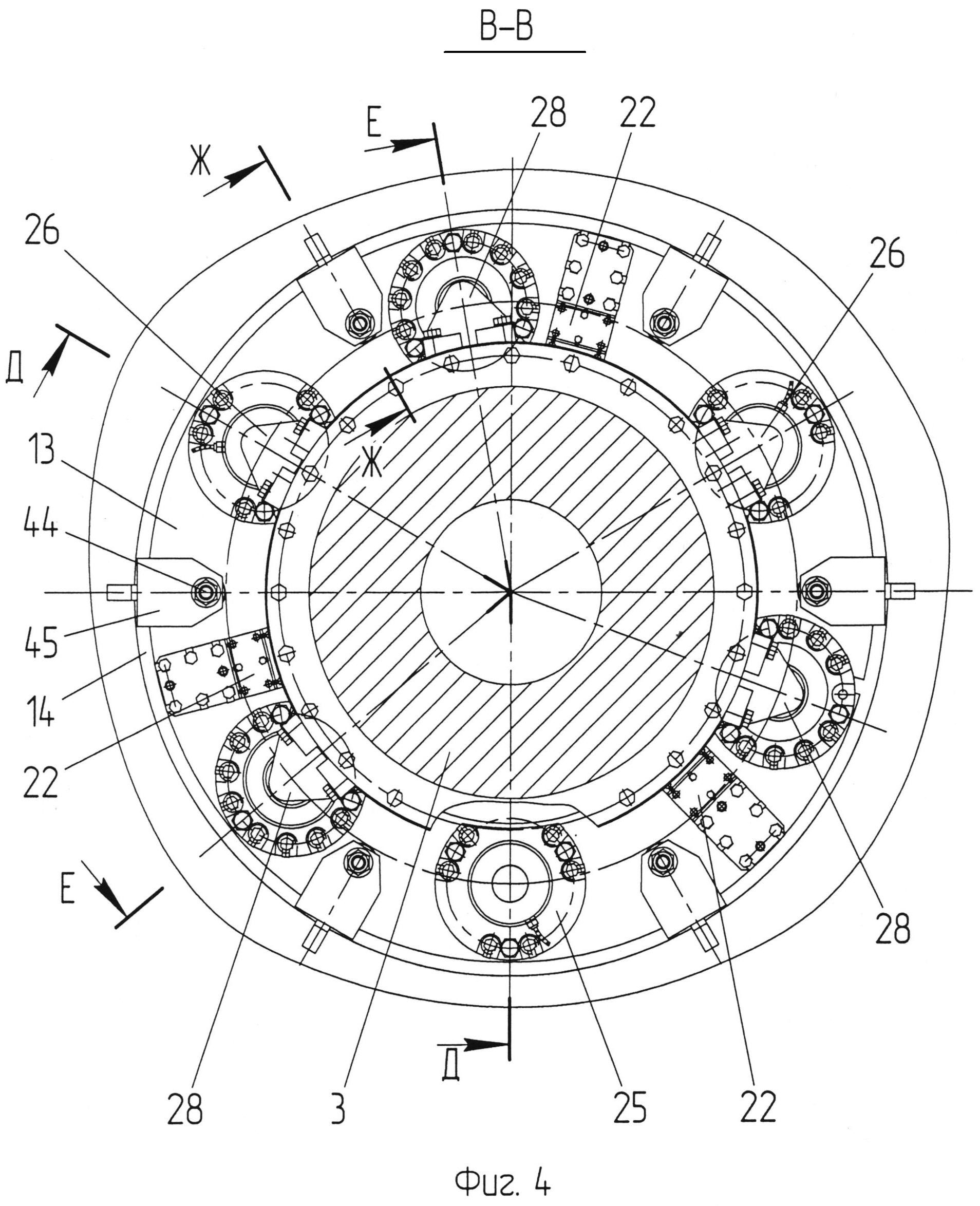
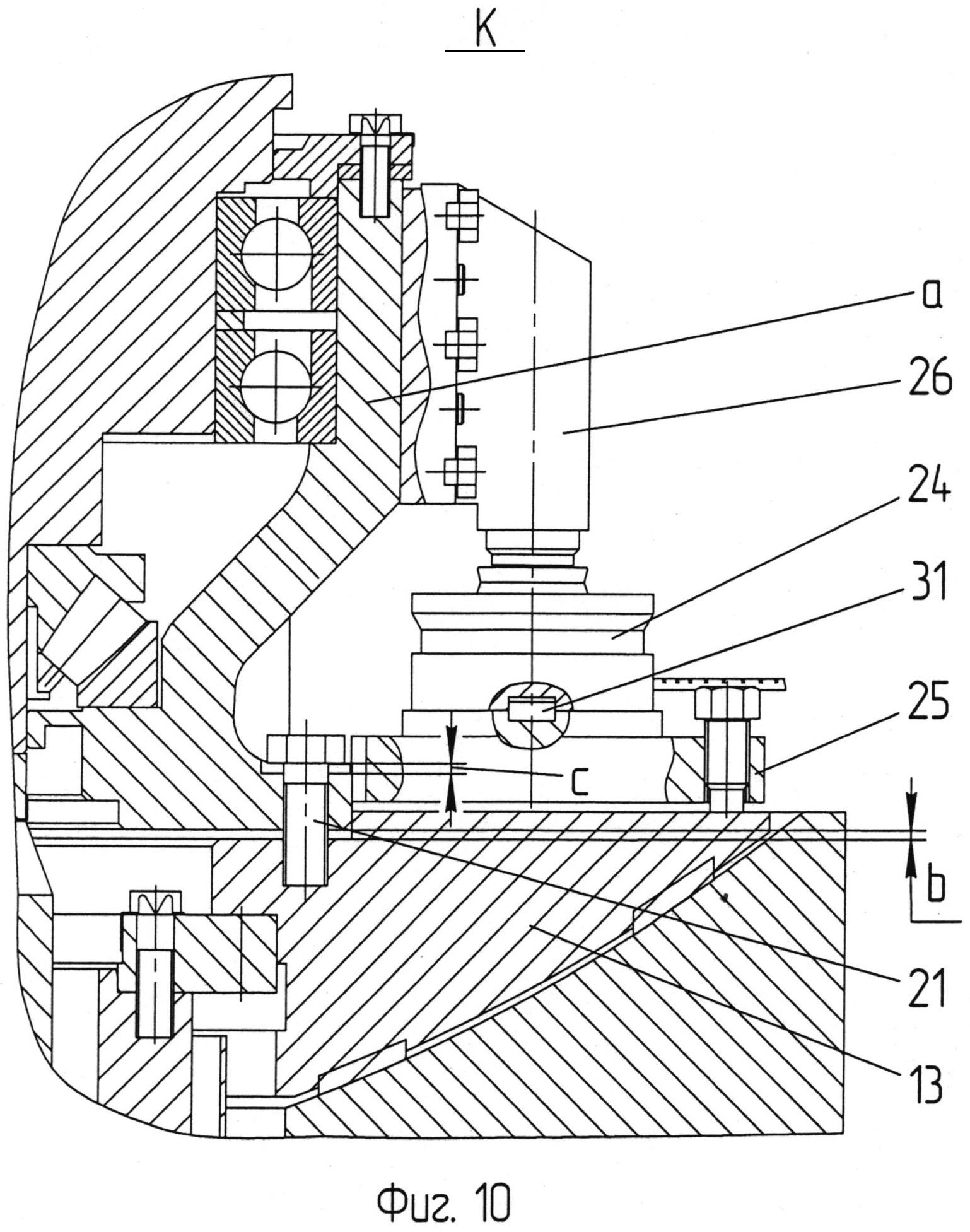
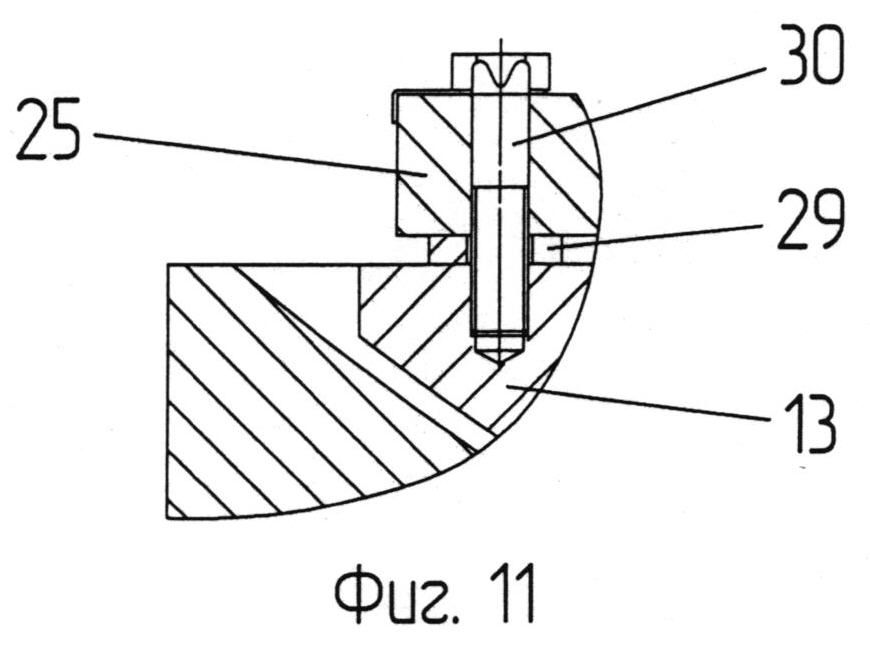
На фиг. 1 схематично показано ОПУ телескопа, общий вид, продольный разрез; на фиг. 2 - устройство крепления регулировочной радиальной подшипниковой опоры на основании, поперечный разрез по А-А на фиг. 1; на фиг. 3 - концевая подшипниковая опора и электромагнитное разгрузочное устройство, элемент Б на фиг. 1, продольный разрез (тензометрические весоизмерительные датчики условно показаны в одной плоскости); на фиг. 4 - упоры, закрепленные на корпусе концевой подшипниковой опоры, контактирующие соответственно с тензометрическими весоизмерительными датчиками и опорными элементами, установленными на сферической пяте, и Г-образные прижимы, установленные на подпятнике, поперечный разрез по В-В на фиг. 3; на фиг. 5 - мембраны, установленные между корпусом концевой подшипниковой опоры и сферической пятой, и опорные элементы, установленные на сферической пяте, поперечный разрез по Г-Г на фиг. 3; на фиг. 6 - тензометрические весоизмерительные датчики, установленные на сферической пяте, контактирующие с ответными упорами, закрепленными на корпусе концевой опоры, продольный разрез по Д-Д на фиг. 4, повернуто; на фиг. 7 - опорные элементы, установленные на сферической пяте, контактирующие с ответными упорами, закрепленными на корпусе концевой опоры, продольный разрез по Е-Е на фиг. 4, повернуто; на фиг. 8 - Г-образный прижим с винтовым механизмом, продольный разрез по Ж-Ж на фиг. 4; на фиг. 9 - мембрана, установленная между корпусом концевой подшипниковой опоры и сферической пятой, продольный разрез по И-И на фиг. 5, повернуто; на фиг. 10 - устройство соединения концевой подшипниковой опоры со сферической пятой и расположение тензометрического весоизмерительного датчика относительно последних, элемент К на фиг. 6, продольный разрез; на фиг. 11 - узел крепления опорного элемента на сферической пяте, продольный разрез; на фиг. 12 - схематично показана оптическая схема ОПУ телескопа с электромагнитным разгрузочным устройством.
В варианте осуществления изобретения ОПУ телескопа содержит основание 1, вилку 2 с полым штырем 3. Вилка 2 включает в себя платформу 4 с двумя стойками 5, 6. В вилке с возможностью поворота вокруг угломестной оси 7 установлен средник 8 с оптическим блоком 9. Вилка 2 установлена на основании 1 с возможностью поворота относительно азимутальной оси 10. Средник с оптическим блоком и вилка соответственно снабжены безредукторными приводами вращения относительно осей 7 и 10. Наведение по осям 7, 10 обеспечивается моментными двигателями, датчиками положения по углу и датчиками скорости (на чертеже не показано).
Штырь 3 установлен посредством закрепленной на основании 1 регулировочной радиальной подшипниковой опоры 11, расположенной в верхней части штыря, и концевой подшипниковой опоры 12, расположенной в нижней части штыря. Последняя соединена со сферической пятой (концевой цапфой) 13, взаимодействующей с подпятником 14, установленным на основании 1. Сферическая пята 13 и подпятник 14 обеспечивают возможность приведения азимутальной оси 10 телескопа в вертикальное положение.
В варианте осуществления изобретения регулировочная радиальная подшипниковая опора 11 воспринимает радиальные нагрузки и включает, например, два радиально-упорных подшипника 15, а концевая подшипниковая опора 12 включает, например, три подшипника: радиально-упорные - 16 и опорный сферический роликовый - 17. Регулировочная радиальная подшипниковая опора 11 штыря обеспечивает точную установку азимутальной (вертикальной) оси 10. В варианте осуществления изобретения регулировочная радиальная подшипниковая опора включает горизонтальную платформу 18, на которой закреплены наружные обоймы подшипников 15. Платформа 18 удерживается от радиальных и угловых перемещений с помощью беззазорного механизма, включающего четыре пары соосных горизонтально расположенных упорных винтов 19, контактирующих с платформой 18. Упорные винты 19 попарно установлены в корпусах 20, которые закреплены на основании 1 и расположены равномерно по окружности платформы 18.
Концевая подшипниковая опора 12 соединена со сферической пятой 13 с возможностью ограниченного перемещения вдоль продольной оси, которая геометрически совмещена с азимутальной осью 10 ОПУ. В варианте осуществления изобретения корпус «а» концевой подшипниковой опоры соединен со сферической пятой посредством крепежных болтов 21, выполняющих функцию страхующих захватов при сейсмике, и, например, трех мембран 22, которые расположены в плоскости, ортогональной азимутальной оси 10, и установлены равномерно по окружности относительно последней. Мембраны 22 воспринимают радиальную нагрузку относительно азимутальной оси 10 и выполняют функцию элементов, центрирующих корпус концевой подшипниковой опоры 12 относительно пяты 13.
ОПУ снабжено электромагнитным разгрузочным устройством 23 с возможностью обеспечения заданной разгрузки концевой подшипниковой опоры 12 в осевом направлении и системой контроля и управления величиной разгрузки концевой подшипниковой опоры. Система контроля и управления величиной разгрузки концевой подшипниковой опоры 12 включает, например, три тензометрических весоизмерительных датчика 24, каждый из которых установлен на сферической пяте 13 посредством соответствующего опорного элемента 25 и контактирует с соответствующим ответным упором 26, закрепленным на корпусе «а» концевой подшипниковой опоры. В качестве тензометрического весоизмерительного датчика может быть использован, например, датчик весоизмерительный типа NHS-A47t. Корпус «а» концевой подшипниковой опоры установлен на весоизмерительных датчиках 24 с образованием зазора «b» (например, 1 мм) между его (т.е. корпуса) нижней торцевой поверхностью и ответной торцевой поверхностью сферической пяты 13. При этом крепежные болты 21, выполняющие функцию страхующих захватов при сейсмике, ввинчены в сферическую пяту 13 с образованием между головками болтов 21 и ответным фланцем корпуса «а» концевой подшипниковой опоры 12 зазора «с» (например, 2 мм), достаточного для обеспечения разгрузки опорного подшипника 17. Необходимо отметить, что все перемещения при разгрузке опорного подшипника 17 находятся в пределах упругих деформаций.
В варианте осуществления изобретения на сферической пяте 13 также установлены, например, три опорных элемента 27, каждый из которых контактирует с соответствующим ответным упором 28, закрепленным на корпусе «а» концевой подшипниковой опоры 12. Опорные элементы 25 и 27 расположены через один равномерно по окружности относительно азимутальной оси 10, установлены на пяте 13 через пригоночные прокладки 29 и закреплены с помощью болтов 30. Для исключения произвольного перемещения весоизмерительных датчиков 24 по верхней поверхности (плоскости) опорных элементов 25 предусмотрены ограничители 31. Установка упоров 28 позволяет повысить общую жесткость устройства и частотные характеристики ОПУ, и, следовательно, повысить точность наведения.
В варианте осуществления изобретения электромагнитное разгрузочное устройство включает электромагнит 32 и разгрузочный диск 33. Электромагнит 32 закреплен снизу на сферической пяте 13 посредством пропущенного через подпятник 14 трубчатого элемента 34. Разгрузочный диск 33 выполнен с центральным отверстием и с помощью кольцевого переходника 35 и пригоночных прокладок 36, 37 закреплен на полом штыре 3 (по существу - на валу азимутальной оси телескопа) посредством трубчатого элемента 38, который с радиальным зазором пропущен через трубчатый элемент 34. Трубчатый элемент 38 соединен со штырем с помощью, например, шпилек 39. Трубчатый элемент 34 соединен со сферической пятой 13 через фланец 40 с помощью болтов 41. При этом разгрузочный диск 33 установлен ортогонально продольной оси трубчатого элемента 38, которая геометрически совмещена с азимутальной осью 10. Трубчатые элементы 34 и 38 выполнены, например, из титанового сплава. Таким образом исключается влияние магнитного поля ЭМРУ на работоспособность ОПУ. Электромагнит 32 включает кольцевой магнитопровод «d», в кольцевой выемке которого размещены, например, две кольцевые электрические катушки 42, 43. Катушки 42, 43 электромагнита 32 оборудованы датчиками температуры (на чертеже не показано). Торцевые поверхности разгрузочного диска 33 и электромагнита 32, обращенные друг к другу, при выключенном электромагните расположены с заданным воздушным зазором «е» (например, 1,75 мм). Заданный зазор обеспечивается с помощью пригоночных прокладок 36, 37.
Электромагнит 32 и разгрузочный диск 33 располагаются в помещении основания 1 (по существу - в пилоне телескопа). Помещение, в котором располагаются электромагнит 32 и разгрузочный диск 33, оборудовано системой местной вытяжной вентиляции (на чертеже не показано) для отвода тепла от ЭМРУ.
Система контроля и управления величиной разгрузки концевой подшипниковой опоры электрически связана с управляющей ЭВМ (на чертеже не показано), которая формирует сигналы управления приводами вращения (наведения).
ОПУ содержит устройство для регулировки вертикальности азимутальной оси 10 вращения вилки 2, включающее снабженные винтовыми механизмами 44 Г-образные прижимы 45, которые установлены на подпятнике 14. Прижимы 45 расположены равномерно по окружности по периферии подпятника 14 и в плане (т.е. на виде сверху) частично перекрывают сферическую пяту 13 с возможностью взаимодействия с ответной поверхностью пяты посредством самоустанавливающихся опорных элементов 46, которыми снабжены винты винтовых механизмов 44.
Через полый штырь 3 пропущен кабелепереход 47 с вилки 2 на основание 1. Кабелепереход 47 выполнен с возможностью прохождения оптического луча вдоль азимутальной (вертикальной) оси 10 к оптической (квантово-оптической) аппаратуре 48, размещенной на неподвижном основании 1. Между упомянутой аппаратурой и оптическим блоком 9 установлены отражающие элементы 49-53), образующие лучевод (лучеводный тракт) с начальным участком, ось которого совмещена с азимутальной осью 10.
Использование ОПУ телескопа осуществляется следующим образом.
При монтаже ЭМРУ сначала на фланце 40 закрепляют трубчатый элемент 34. Фланец 40 соединяют со сферической пятой 13. Затем на закладной части основания 1 устанавливают и закрепляют подпятник 14 со сферической пятой 13. На сферической пяте с помощью болтов 30 производят предварительную установку (крепление) опорных элементов 25 с входящими в систему контроля и управления величиной разгрузки концевой подшипниковой опоры тензометрическими весоизмерительными датчиками 24 и установку опорных элементов 27. Далее, при помощи квадранта (на чертеже не показано) посредством Г-образных прижимов 45, снабженных винтовыми механизмами 44, производят предварительное горизонтирование сферической пяты 13. После этого самоустанавливающиеся опорные элементы 46 винтов винтовых механизмов 44 устанавливают с заданным зазором (например, 5 мм) от ответной поверхности пяты 13. На полом штыре 3 (по существу - на валу азимутальной оси телескопа) закрепляют трубчатый элемент 38. На корпусе «а» концевой подшипниковой опоры 12 соответственно опорным элементам 25 и 27 закрепляют упоры 26 и 28. Концевую подшипниковую опору 12 с помощью болтов 21 закрепляют на сферической пяте 13. Для обеспечения заданного положения азимутальной оси вращения вилки 2 с полым штырем 3 посредством упорных винтов 19 производят поворот вилки с полым штырем относительно центра сферической поверхности подпятника 14, после чего положение упорных винтов 19 фиксируют. Далее, посредством винтовых механизмов 44 Г-образных прижимов 45 фиксируют положение сферической пяты 13 относительно подпятника 14. Устанавливают заданный зазор «с» между головками крепежных болтов 21 и ответным фланцем корпуса «а» концевой подшипниковой опоры 12 и стопорят крепежные болты 21. В таком положении болты 21 выполняют функцию страховочных захватов при сейсмике.
Производят окончательную установку опорных элементов 25 с тензометрическими весоизмерительными датчиками 24. При этом опорные элементы 25 посредством соответствующих технологических отжимных болтов (на чертеже не показано) с помощью пригоночных прокладок 29 устанавливают по высоте таким образом, чтобы при контакте датчиков 24 с соответствующими ответными упорами 26 обеспечить одинаковые показания всех трех датчиков, в сумме равные, например, весу концевой подшипниковой опоры 12. Затягивают соответствующие крепежные болты 30. Таким образом, обеспечивается желаемая (заданная) высота опорных элементов 25.
Затем на вилке 2 монтируют входящие в ОПУ элементы (т.е. производят монтаж поворотных частей ОПУ в целом), при этом вместо оптического блока устанавливают его весовой макет. После этого производят окончательную установку опорных элементов 27. При этом опорные элементы 27 посредством соответствующих технологических отжимных болтов (на чертеже не показано) с помощью пригоночных прокладок 29 устанавливают по высоте таким образом, чтобы при контакте опорных элементов 27 с соответствующими ответными упорами 28 уменьшить показания каждого из весоизмерительных датчиков 24, например, на 30 кН, т.е. показания всех трех датчиков 24 в сумме должны быть равны весу ОПУ с весовым макетом оптического блока минус 90 кН. Затягивают соответствующие крепежные болты 30. Таким образом, обеспечивается желаемая (заданная) высота опорных элементов 27.
На трубчатых элементах 38 и 34 монтируют электромагнит 32 и разгрузочный диск 33, при этом с помощью пригоночных прокладок 36, 37 обеспечивают заданный воздушный зазор «е» между обращенными друг к другу торцевыми поверхностями разгрузочного диска 33 и электромагнита 32. Систему контроля и управления величиной разгрузки концевой подшипниковой опоры подключают к управляющей ЭВМ опорно-поворотного устройства (по существу - к системе управления телескопа в целом). После монтируют штатный оптический блок.
При подаче питания на электрические катушки 42, 43 электромагнита 32 возникает магнитное поле, притягивающее разгрузочный диск 33 к кольцевому магнитопроводу «d». Разгрузочный диск 33 с помощью кольцевого переходника 35 посредством трубчатого элемента 38 с помощью шпилек 39 соединен с полым штырем 3 (т.е. с валом азимутальной оси), опирающимся своими заплечиками на опорный подшипник 17, воспринимающий весь вес вращающейся части телескопа. Под действием магнитного поля разгрузочный диск 33 посредством переходника 35 и трубчатого элемента 38 приподнимает нагруженный массой вращающейся части телескопа вал 3 азимутальной оси телескопа, разгружая опорный подшипник 17 на величину, равную притягивающей силе, возникающей в электромагните 32. Величина тока электрических катушек электромагнита ЭМРУ определяется исходя из значений задания величины разгрузки и величины сигнала действующей нагрузки на опорный подшипник 17, полученного от тензометрических весоизмерительных датчиков 24.
Тензометрические весоизмерительные датчики 24 при достижении усилия разгрузки необходимой величины дают сигнал в систему управления телескопа о готовности к наведению.
Наведение (слежение) оптического блока 9 на наблюдаемый объект может производиться раздельно или одновременно по осям 7 и 10. Моментные двигатели безредукторных приводов вращения обеспечивают поворот подвижных частей монтировки, а также их удержание на любом угле наведения. При наведении телескопа датчики обратной связи положения по углу и скорости, соответственно связанные непосредственно с угломестным и азимутальным валами, обеспечивают выдачу сигналов о фактических углах поворота, а также скорости вращения относительно соответствующих осей наведения в управляющую ЭВМ (на чертеже не показано), которая формирует сигналы управления приводами вращения (наведения).
Электромагнитное разгрузочное устройство ОПУ может находиться в следующих режимах.
Режим холостого хода. Ожидание, ток электрических катушек 42, 43 электромагнита 32 равен нулю.
Режим работы. ЭМРУ получает от системы управления телескопа значение необходимой величины электромагнитной разгрузки. В электрических катушках 42, 43 электромагнита 32 течет ток, пропорциональный заданной электромагнитной разгрузке.
Режим рекуперации. Наступает при снятии задания и отключении электромагнитной разгрузки. Электрические катушки электромагнита 32 шунтируются (замыкаются). Запасенная в магнитном поле электрических катушек 42, 43 электромагнитная энергия плавно уменьшается по экспоненциальному закону.
Режим размагничивания. Служит для устранения остаточного намагничивания кольцевого магнитопровода «d» электромагнита 32. В течение, например, трех секунд в электрических катушках 42, 43 электромагнита 32 протекает ток обратной направленности (по отношению к току в режиме работы).
Перевод ЭМРУ с режима холостого хода (ожидания) в режим работы и обратно производится системой управления телескопа. При этом режимы рекуперации и размагничивания отрабатываются автоматически при снятии задания электромагнитной разгрузки.
Благодаря возможности уменьшения веса, приходящегося на опорный подшипник 17, достигается уменьшение момента его сопротивления вращению, что особенно важно при движении телескопа с ползучими скоростями - (2-5)″/с, т.к. на этих скоростях возможна смена трения качения на трение покоя. Известно, что трение покоя, по меньшей мере, в два раза больше трения качения, поэтому при вращении на малых скоростях с большим моментом сопротивления вращению может происходить не плавное, а скачкообразное движение. Уменьшение веса, приходящегося на опорный подшипник, пропорционально снижает момент его сопротивления вращению и разницу в моментах сопротивления вращению при смене трения покоя на трение качения, тем самым повышая плавность движения вращающейся части телескопа и, соответственно, точность слежения телескопа за объектами. Кроме того, это позволяет снизить мощность моментного двигателя привода вращения относительно азимутальной оси 10.
Таким образом, благодаря особенностям выполнения опорно-поворотного устройства, изобретение обеспечивает возможность повышения точности наведения большого по астрономическим меркам телескопа при обеспечении слежения с ползучей скоростью.
Гидроакустический способ контроля скорости потока жидких сред в трубопроводах
Транспортное средство для перевозки суперконтейнеров с разрядными и экологически опасными грузами
Импульсный источник напряжения
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Устройство для буксировки подводных аппаратов подводной лодкой
Формирователь последовательности прямоугольных импульсов с изменяемой длительностью и интервалом
Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника
Гидроакустический способ контроля скорости потока жидких сред в трубопроводах
Транспортное средство для перевозки суперконтейнеров с разрядными и экологически опасными грузами
Импульсный источник напряжения
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Устройство для буксировки подводных аппаратов подводной лодкой

