Результат интеллектуальной деятельности: СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к методам управления движением пассивных космических объектов (КО) с помощью активных космических аппаратов (КА), включающих в свой состав двигательную установку (ДУ) с ракетными двигателями малой тяги, в качестве которых могут использоваться электрические ракетные двигатели (ЭРД). Изобретение связано с проблемой очистки космического пространства от техногенных загрязнений, в том числе от фрагментов и обломков нефункционирующих (пассивных) КА.
Космический мусор представляет существенную угрозу для КА, функционирующих в области космического пространства вблизи геостационарной орбиты Земли (ГСО). Нефункционирующие КА и их фрагменты находятся на орбитах с широким диапазоном параметров по эксцентриситету (от 0 до 0,7) и наклонению орбит (от 0° до 49°). Вышедшие из строя геостационарные КА существуют на околокруговых суточных орбитах с наклонением до 15°. Для безопасной работы КА, в частности, в области ГСО необходимо удалить из защищаемой области космического пространства выработавшие свой ресурс КА, средства выведения КА и другие пассивные КО. Проблема транспортировки космического мусора из области функционирования активных КА приобретает в настоящее время актуальное значение для безопасного использования околоземного космического пространства.
Для решения данной задачи предлагаются различные средства и методы, включая разрушение обломков КО воздействием мощного лазерного излучения или за счет ударно-кинетического взаимодействия с мелкими фрагментами КО. Однако данные методы обладают низкой эффективностью и не обеспечивают очистку защищаемой области пространства от космического мусора.
Так, например, известен способ очистки космического пространства от объектов космического мусора, описанный в патенте RU 2478062 (опубликован 27.03.2013). Данный способ заключается в торможении КО с целью его перевода на более низкую орбиту захоронения. Торможение обеспечивается путем создания искусственного препятствия на траектории следования космического мусора в виде облака твердых частиц. В качестве материала частиц используют продукты окисления азота, находящиеся в твердом состоянии. Размер частиц выбирается в зависимости от размера КО и траектории его движения.
Твердые частицы оказывают ударно-кинетическое воздействие на объекты космического мусора. Вследствие этого должно происходить торможение КО (космического мусора) и переход КО на более низкую орбиту захоронения. Однако описанный в патенте RU 2478062 метод не позволяет создать регулируемое управляющее воздействие на КО, обеспечивающее эффективную транспортировку КО на расчетную орбиту захоронения. Более того, распыление в области защищаемой орбиты облака мелких и крупных твердых частиц приведет к увеличению плотности космического мусора, что окажет негативное влияние на безопасность КА, функционирующих вблизи защищаемой орбиты.
Для торможения КО в облаке частиц орбитальная скорость КО должна превышать орбитальную скорость твердых частиц в облаке. Эффективность торможения КО в этом случае пропорциональна произведению плотности облака на квадрат скорости КО относительно потока твердых частиц. Поэтому твердые частицы и КО должны двигаться по существенно разным орбитам, и торможение КО может осуществляться только в течение короткого промежутка времени, когда КО пересекает облако твердых частиц. С учетом различной эволюции орбит КО и облака твердых частиц сложно рассчитывать более чем на одно пересечение КО потока частиц. Описанные процессы предопределяют низкую эффективность предложенного способа.
Другой метод воздействия на находящиеся на защищаемой орбите КО описан в опубликованной патентной заявке US 2007/0285304 (опубликована 13.12.2007). Данный метод включает выведение на расчетную околоземную орбиту КА с гибридным ракетным двигателем, генерирующим направленный высокотемпературный газовый поток с твердыми частицами, образующимися при сгорании твердого топлива. Управление движением КА осуществляется с помощью системы ориентации и наведения генерируемого потока на цель, роль которой выполняет транспортируемый КО. Для сближения с КО используется радиолокационная система измерения координат и расстояния между сервисным КА и транспортируемым КО. Компенсация сил, действующих на КА при воздействии на транспортируемый КО, обеспечивается посредством реверса тяги ракетного двигателя.
Использование высокотемпературного газового потока с твердыми частицами для решаемой задачи имеет ряд ограничений. Во-первых, угол расширения газового потока, истекающего через сверхзвуковое сопло ракетного двигателя, составляет не менее 20°. В этом случае для эффективной передачи силового воздействия на транспортируемый КО расстояние между сервисным КА и транспортируемым КО должно быть небольшим. Из-за этого возникают трудности с наведением и поддержанием расчетного положения КА в течение времени, необходимого для перехода КО на требуемую орбиту захоронения. При этом следует учитывать возможность разрушения транспортируемого КО на мелкие фрагменты при воздействии на корпус КО плотного высокотемпературного газового потока. Во-вторых, предлагаемый для использования ракетный двигатель обладает низким удельным импульсом и, соответственно, эффективность использования рабочего вещества для создания тяги оказывается низкой.
Более эффективными по сравнению с химическими ракетными двигателями являются ЭРД, в частности ионные плазменные двигатели. Данные двигатели обладают высоким удельным импульсом (до 30000 м/с) и малым углом расходимости генерируемого ионного пучка (до 5°). Ионные плазменные двигатели включают в свой состав источник (инжектор) направленного пучка ионов и нейтрализатор (компенсатор) пространственного заряда генерируемого пучка ионов.
Известны методы транспортировки КО путем воздействия на поверхность КО направленным квазинейтральным ионным пучком, генерируемым ионной пушкой (инжектором), размещенной на борту сервисного КА. Наиболее близким аналогом изобретения является система, предназначенная для изменения ориентации и пространственного положения КО с помощью сервисного КА. Данная система описана в международной заявке WO 2011/110701 А1 (опубликована 15.09.2011).
Система включает в свой состав сервисный КА, с помощью которого осуществляется перемещение в космическом пространстве транспортируемого КО. В качестве КО может использоваться выработавший свой ресурс КА, отработавшая ступень ракеты-носителя или КО естественного происхождения (астероид, комета, метеорит и т.д.). В частности, транспортируемым КО может быть телекоммуникационный КА, находящийся в неактивном состоянии. На борту сервисного КА установлена ионная пушка (ИП), с помощью которой генерируется квазинейтральный ионный пучок, воздействующий на поверхность КО.
Сближение КА с транспортируемым КО и ориентация КА относительно транспортируемого КО осуществляется с помощью ДУ, установленной на борту КА. Управление направлением квазинейтрального ионного пучка производится с использованием манипулятора (перемещаемой платформы), который обеспечивает перемещение ИП относительно корпуса сервисного КА без изменения ориентации КА относительно КО.
Система управления сервисного КА на основании данных системы измерений вырабатывает управляющие сигналы, передаваемые на ИП и ДУ. Управление КА происходит с учетом данных о расстоянии между КА и КО и о текущей ориентации КО. Измерение параметров производится с помощью радара и системы наблюдения, работающей в оптическом диапазоне. Измерительное оборудование устанавливается на борту КА. Информация, получаемая от радара и системы наблюдения, обрабатывается в модуле измерений и передается в бортовой комплекс управления КА.
Метод бесконтактной транспортировки КО из защищаемой области космического пространства на орбиту захоронения включает вывод на исходную расчетную орбиту сервисного КА, сближение КА с транспортируемым КО и ориентацию КА относительно транспортируемого КО с помощью ДУ. При этом производится измерение координат транспортируемого КО и расстояния между КА и КО. После этого осуществляется наведение ИП на заданную область поверхности КО и воздействие на поверхность КО квазинейтральным ионным пучком.
При осуществлении известного способа необходимо постоянно производить динамическую компенсацию возмущающих сил и моментов, действующих на КА, и динамическую ориентацию КА относительно транспортируемого КО. Такая динамическая компенсация и ориентация осуществляется с помощью ДУ и перемещаемой платформы, на которой установлена ИП.
Однако известная схема динамической компенсации и ориентации энергетически не эффективна и функционально ограничена в связи со следующими обстоятельствами. Для обеспечения заданной ориентации квазинейтрального ионного пучка относительно поверхности транспортируемого КО и поддержания заданной дистанции между КА и КО требуется одновременная работа двигателей, входящих в состав ДУ, и манипулятора, производящего перемещение платформы с ИП относительно корпуса КА. Следует отметить, что при реализации способа-аналога не предусмотрена возможность изменения направления вектора тяги двигателя относительно центра масс КА. Поэтому перемещение ИП и изменение за счет этого направления движения квазинейтрального ионного пучка ограничено узким диапазоном углового смещения вектора тяги ИП относительно продольной оси КА, проходящей через его центр масс.
Вследствие ограниченных возможностей изменения направления квазинейтрального ионного пучка (относительно корпуса КА) необходимо постоянно изменять ориентацию КА при одновременной компенсации сил и моментов, действующих на КА. Решение данных задач с помощью двигательной установки с фиксированным направлением вектора тяги возможно только за счет контролируемого изменения величины тяги каждого двигателя, входящего в состав ДУ. В этом случае ДУ должна содержать не менее трех двигателей для организации движения в трех направлениях относительно центра масс КА.
При использовании ДУ, содержащей не менее трех двигателей с неуправляемыми узлами крепления и ИП, установленной на перемещаемой платформе, не могут быть выполнены требования по эффективному использованию энергии и рабочего вещества для управления движением КА. Большое значение имеет тяговая эффективность ДУ при выполнении маневров, включающих одновременное управление величиной тяги, направлением вектора тяги и величиной управляющих моментов. Снижение тяговой эффективности при длительном выполнении сложных маневров приводит к увеличению непроизводительного расхода рабочего вещества, применяемого для питания ДУ и ИП.
Для управления движением и ориентацией КА в настоящее время используются ЭРД, выполненные с возможностью поворота в узле крепления. Двигатели устанавливаются в узлах крепления, обеспечивающих поворот в двух взаимно перпендикулярных плоскостях. При повороте двигателей на углы 5÷10° создается боковая тяга (по отношению к продольному направлению). Величина тяги в боковом направлении достигает ~18% от номинального значения тяги в продольном направлении. Величина продольной тяги в этом случае снижается на 1,5%. При повороте двигателей на угол 20° боковая тяга составляет ~36% от величины продольной тяги. Потери тяги в этом случае составляют ~6%. При повороте двигателей на угол 30° боковая тяга составляет ~58% от величины продольной тяги. Потери тяги в этом случае составляют ~14%.
При повороте ЭРД в узлах крепления, закрепленных на корпусе КА, направление вектора тяги смещается относительно центра масс КА. Вследствие этого возникают возмущающие моменты, которые необходимо компенсировать. Для этого необходимо дополнительное включение двигателей ДУ, что приводит к увеличению расхода рабочего вещества и энергии. В результате эффективность использования тяги ЭРД оказывается низкой. Кроме того, при фиксированном положении узлов креплении ЭРД на корпусе КА ограничиваются возможности по изменению точки приложения тяг двигателей в пространстве.
Изобретение направлено на повышение тяговой эффективности ДУ и эффективности использования рабочего вещества при осуществлении динамической компенсации сил и моментов, действующих на КА, и ориентации КА относительно транспортируемого КО. Для этого необходимо обеспечить изменение направления векторов тяги двигателей и точек приложения векторов тяги в широком диапазоне углов и координат при управлении движением и ориентацией КА. Ставится также задача обеспечить динамическую компенсацию сил и моментов и ориентацию КА при одновременном включении не более двух двигателей. За счет решения перечисленных выше задач достигается технический результат, заключающийся в повышении эффективности бесконтактной транспортировки КО.
Достижение указанного технического результата обеспечивается при осуществлении способа бесконтактной транспортировки КО из защищаемой области космического пространства на орбиту захоронения. Способ включает следующие операции: вывод на исходную расчетную орбиту сервисного КА, сближение КА с транспортируемым КО, ориентацию КА относительно транспортируемого КО с помощью ДУ, установленной на борту КА, измерение координат КО и КА и расстояния между КА и КО, и воздействие на поверхность КО квазинейтральным ионным пучком с помощью ИП, установленной на борту КА. В процессе воздействия на поверхность КО производят динамическую компенсацию сил и моментов, действующих на КА, и динамическую ориентацию КА относительно транспортируемого КО.
Согласно изобретению управление движением и ориентацией КА осуществляют с помощью ДУ, содержащей, по меньшей мере, один ЭРД, перемещаемый с помощью шарнирного механизма относительно центра масс КА. Управление движением и ориентацией КА осуществляют путем изменения направления вектора тяги и точки его приложения за счет перемещения двигателя в плоскости, ортогональной оси, проходящей через центр масс КА в направлении вектора тяги ИП, и относительно указанной плоскости.
Высокая энергетическая эффективность бесконтактной транспортировки КО достигается при выполнении описанной выше последовательности операций за счет пользования, по меньшей мере, одного двигателя, узел крепления которого соединен с корпусом КА через шарнирный механизм.
Данный механизм обеспечивает перемещение двигателя вместе с узлом крепления в плоскости, ортогональной оси, проходящей через центр масс КА в направлении вектора тяги ИП, и перемещение двигателя относительно указанной плоскости. В процессе динамической компенсации возмущающих сил и моментов и ориентации КА относительно транспортируемого КО двигатель с помощью шарнирного механизма перемещают в расчетное положение. В результате изменяется направление вектора тяги и точка его приложения в соответствии с программой управления движением и ориентацией КА. В этом случае не требуется управление ИП с помощью манипулятора (перемещаемой платформы), поскольку ДУ вырабатывает импульсы силы и моменты сил для поддержания заданного взаимного положения КА и КО.
Высокая тяговая эффективность ДУ обеспечивается за счет фиксации пространственного положения двигателя, определяющего направление и точку приложения вектора тяги в каждый текущий момент времени в соответствии с программой динамической компенсации сил и моментов и ориентации КА. Возможность свободного перемещения двигателя вместе с его узлом крепления относительно центра масс КА позволяет снизить расход рабочего вещества при управлении проекциями результирующей тяги на оси координат, связанные с центром масс КА, и значениями моментов относительно осей координат.
Для управления движением и ориентацией КА вместе с изменением направления вектора тяги и точки его приложения целесообразно изменять величину тяги двигателя.
Способ бесконтактной транспортировки может использоваться для перемещения транспортируемых КО, находящихся в защищаемой области вблизи ГСО. В частности, можно перемещать КО с ГСО на более высокую орбиту по сравнению с ГСО. В этом случае обеспечивается безопасное функционирование активных КА на ГСО и их беспрепятственная связь с наземными станциями.
После перемещения транспортируемого КО на орбиту захоронения сервисный КА может переходить по спиральной траектории на орбиту, на которой находится следующий транспортируемый КО.
В процессе управления движением и ориентацией КА двигатель может перемещаться относительно узла крепления с помощью шарнирного механизма, обеспечивающего поворот ЭРД в двух взаимно перпендикулярных плоскостях. Данная возможность обеспечивается при использовании карданного шарнира.
Управление движением и ориентацией КА посредством перемещения двигателя может осуществляться с помощью шарнирного механизма, включающего в свой состав штангу и два шарнира. В этом случае штанга соединяется с одной стороны с корпусом КА через первый шарнир, а с противоположной стороны - с узлом крепления двигателя через второй шарнир.
Управление движением и ориентацией КА посредством перемещения двигателя может осуществляться также с помощью шарнирного механизма, включающего в свой состав две штанги и три шарнира. Первая штанга соединяется с одной стороны с корпусом космического аппарата через первый шарнир, а с противоположной стороны - с концевой частью второй штанги через второй шарнир. Противоположная концевая часть второй штанги соединяется с узлом крепления двигателя через третий шарнир.
Управление движением и ориентацией КА может осуществляться с помощью двигательной установки, содержащей два двигателя. Перемещение двигателей может производиться с помощью двух шарнирных механизмов. Каждый шарнирный механизм включает в свой состав штангу и два шарнира. Концевая часть штанги первого шарнирного механизма соединяется с корпусом КА через первый шарнир, а противоположная концевая часть штанги - с узлом крепления первого двигателя через второй шарнир. Концевая часть штанги второго шарнирного механизма соединяется с корпусом КА через первый шарнир, а противоположная концевая часть штанги - с узлом крепления второго двигателя через второй шарнир. В данном варианте реализации способа первые шарниры двух шарнирных механизмов устанавливаются диаметрально противоположно на корпусе КА, на равном расстоянии относительно оси, проходящей через центр масс КА в направлении вектора тяги ИП.
При использовании в составе ДУ двух двигателей перемещение двигателей может осуществляться с помощью шарнирного механизма, содержащего три штанги и четыре шарнира. В данном случае срединная точка первой штанги устанавливается на оси вращения, которая соосна с осью, проходящей через центр масс КА в направлении вектора тяги ИП. Вторая штанга соединяется с одной стороны с концевой частью первой штанги через первый шарнир и с противоположной стороны - с узлом крепления первого двигателя через второй шарнир. Третья штанга соединяется с одной стороны с противоположной концевой частью первой штанги через третий шарнир и с противоположной стороны - с узлом крепления второго двигателя через четвертый шарнир.
Для равномерного воздействия на поверхность транспортируемого объекта квазинейтральным ионным пучком целесообразно использовать ИП, обеспечивающую равномерное распределение плотности ионного тока по сечению ионного пучка. В газоразрядной камере ИП возбуждают индукционный высокочастотный электрический разряд (ВЧ разряд). С целью получения сфокусированного квазинейтрального ионного пучка с равномерным распределением плотности тока по сечению пучка возбуждение разряда в разрядном объеме осуществляется с помощью плоского индуктора. Индуктор устанавливается с внешней стороны торцевой стенки газоразрядной камеры, выполненной из прозрачного для электромагнитного излучения материала.
Далее изобретение поясняется описанием конкретных примеров реализации способа бесконтактной транспортировки КО из защищаемой области космического пространства, расположенной вблизи ГСО, на орбиту захоронения.
На поясняющих чертежах изображено следующее:
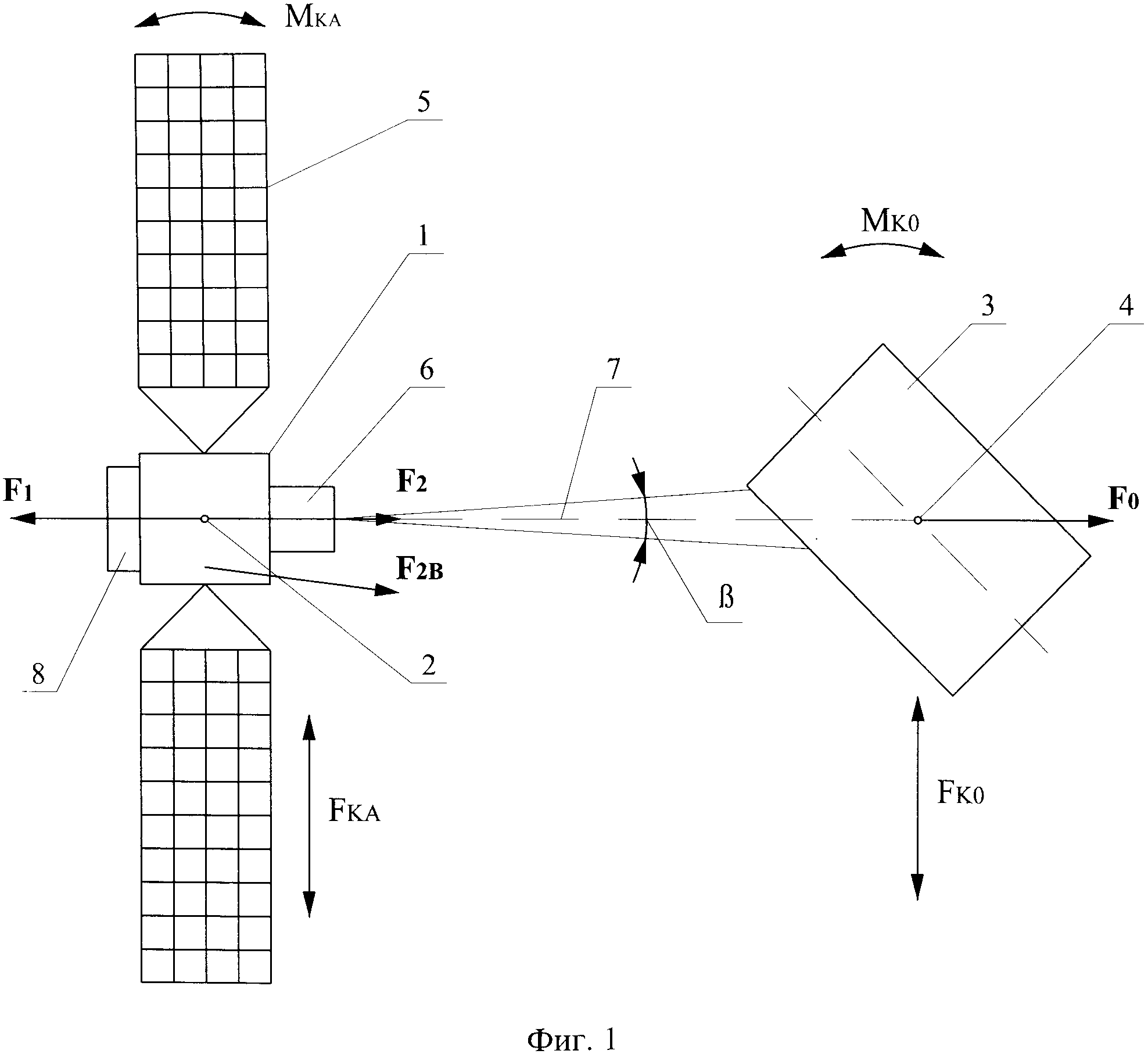
на фиг. 1 - схема действия реактивных сил при осуществлении бесконтактной транспортировке КО;
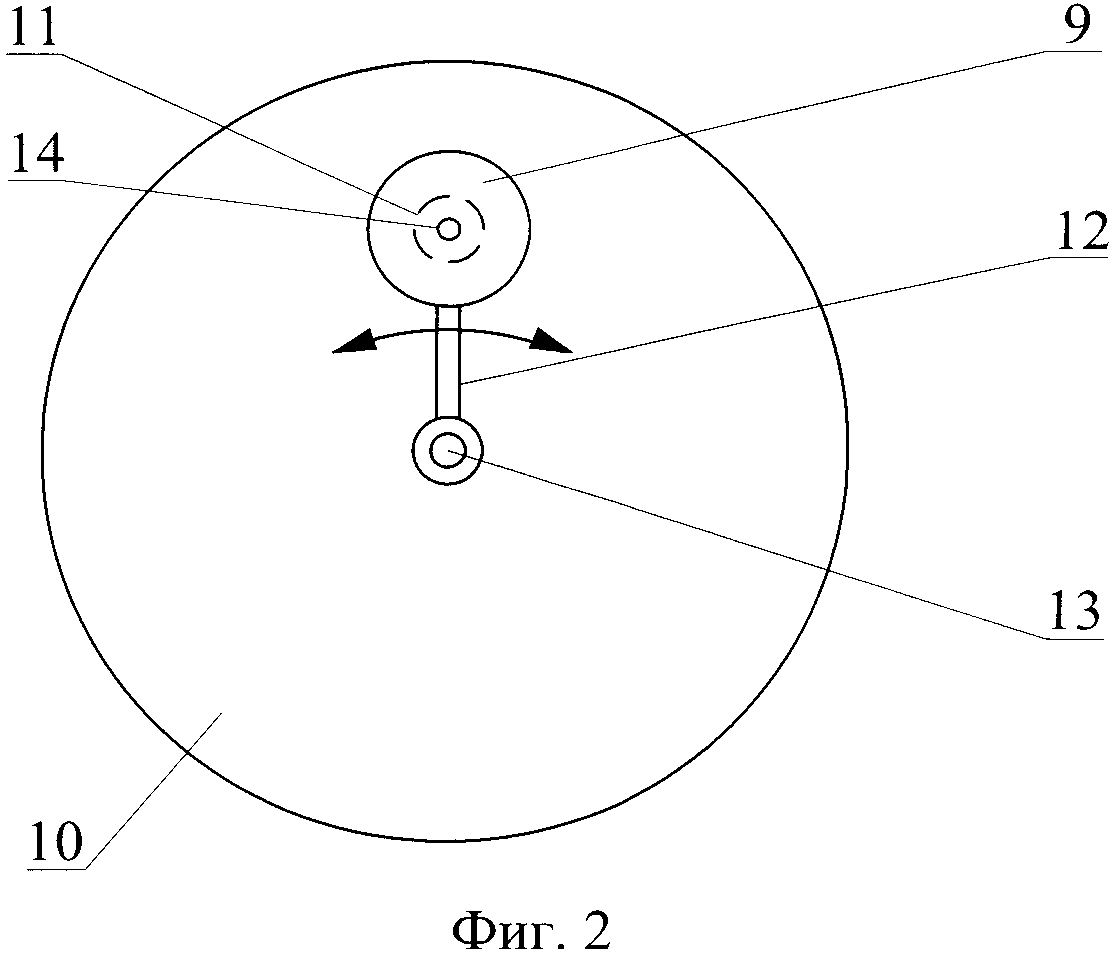
на фиг. 2 - схема размещения на торцевой части корпуса КА элементов ДУ при использовании одного двигателя, перемещаемого с помощью шарнирного механизма, состоящего из одной штанги и двух шарниров;
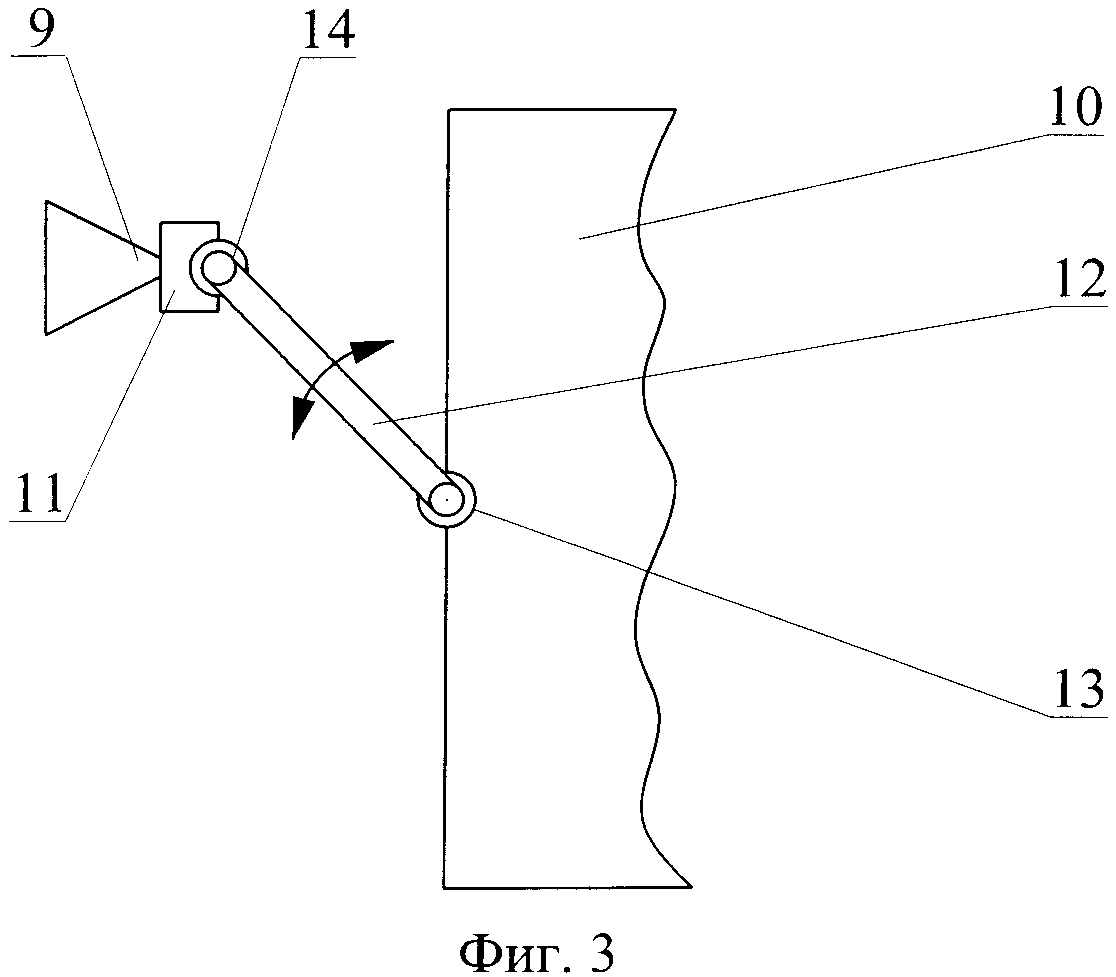
на фиг. 3 - вид сбоку на корпус КА с элементами ДУ при использовании одного двигателя, перемещаемого с помощью шарнирного механизма, состоящего из одной штанги и двух шарниров;
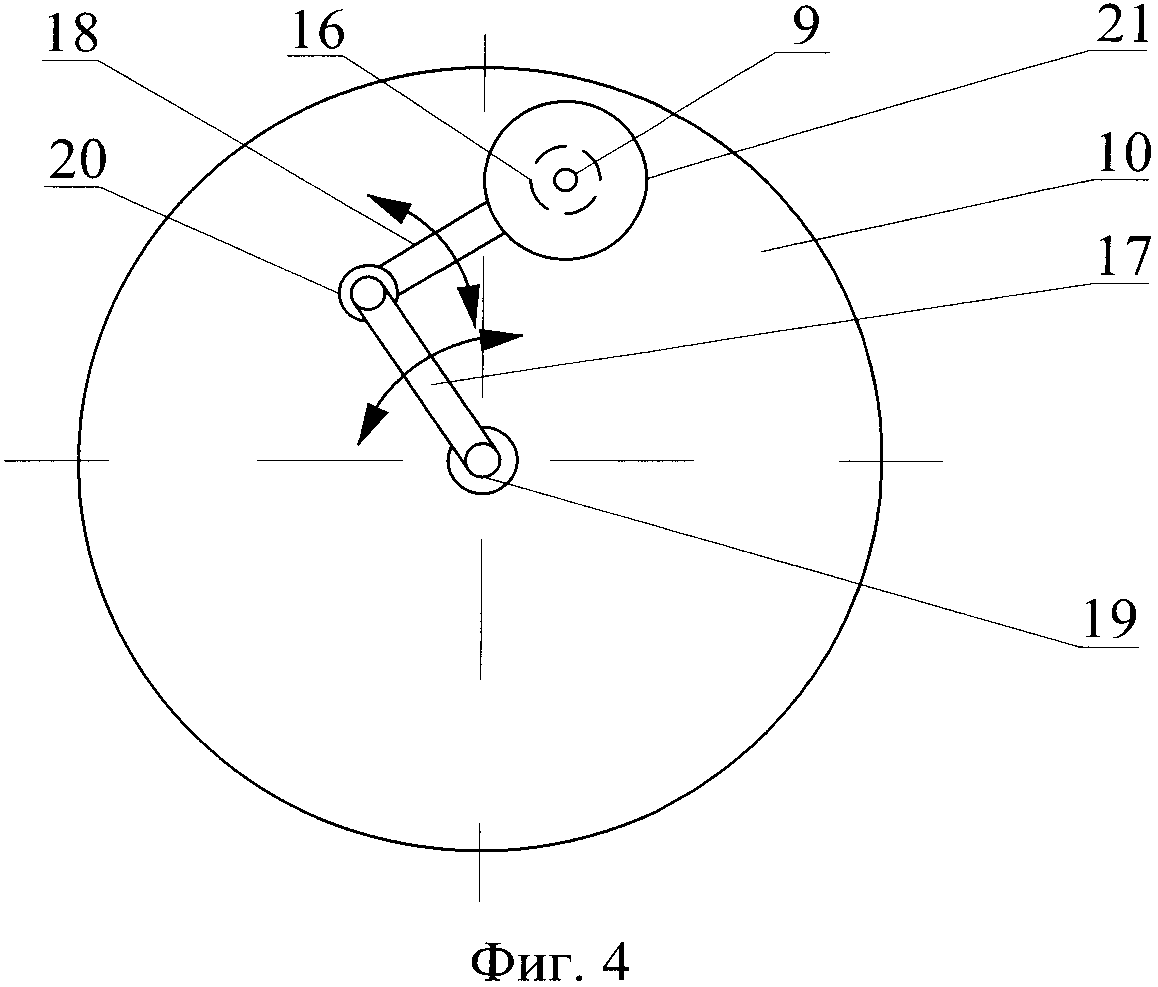
на фиг. 4 - схема размещения на торцевой части корпуса КА элементов ДУ при использовании одного двигателя, перемещаемого с помощью шарнирного механизма, состоящего из двух штанг и трех шарниров;
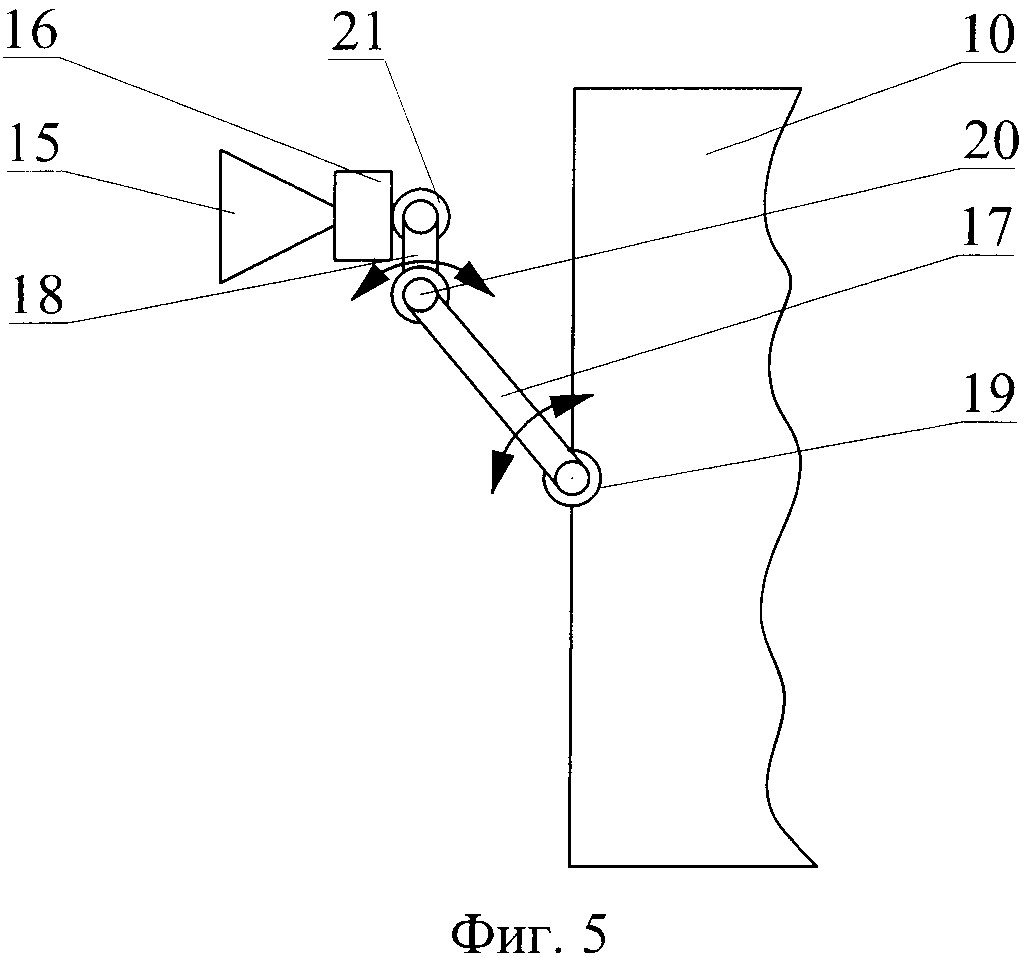
на фиг. 5 - вид сбоку на корпус КА с элементами ДУ при использовании одного двигателя, перемещаемого с помощью шарнирного механизма, состоящего из двух штанг и трех шарниров;
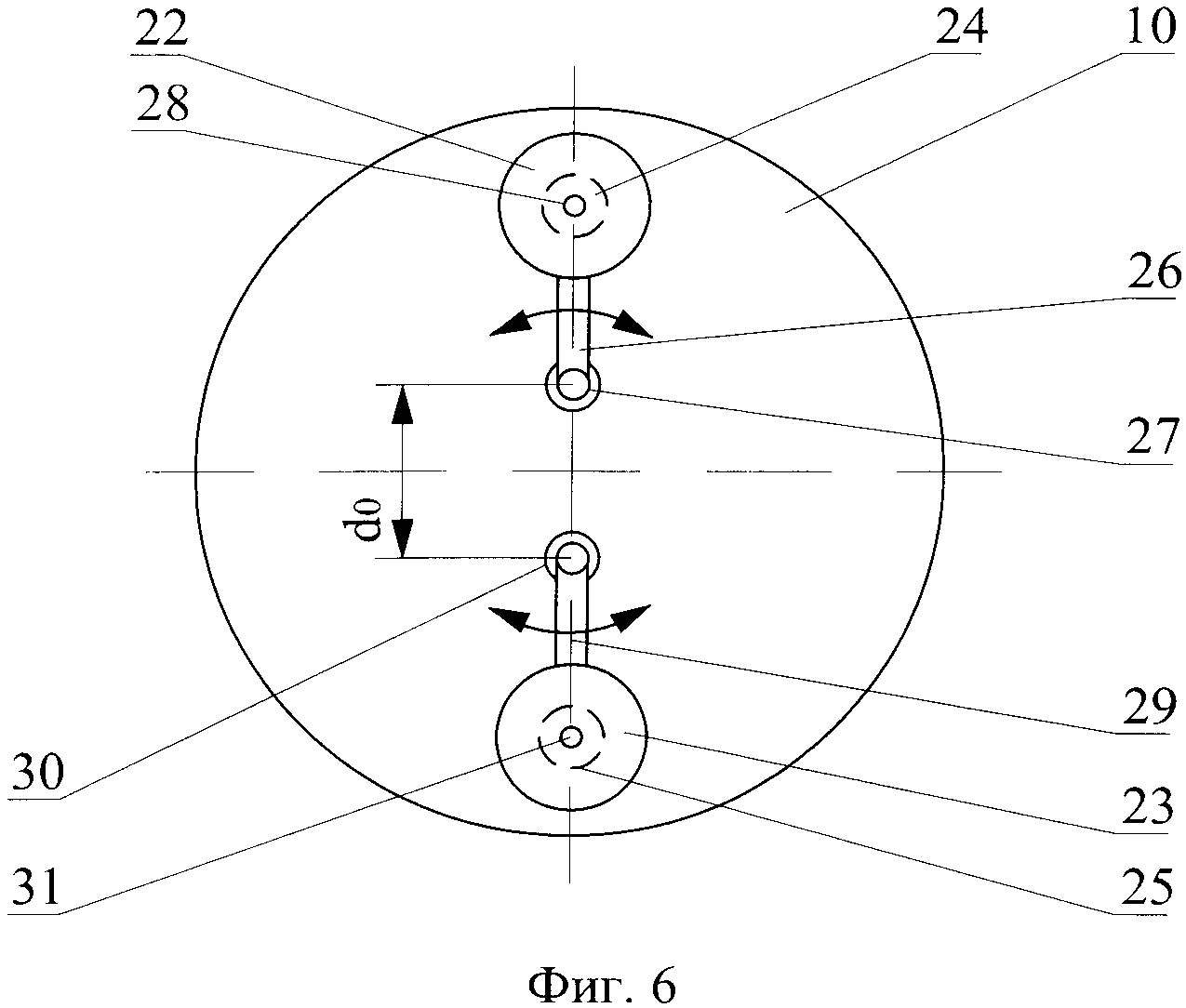
на фиг. 6 - схема размещения на торцевой части КА элементов ДУ при использовании двух двигателей, перемещаемых с помощью двух шарнирных механизмов, каждый из которых состоит из одной штанги и двух шарниров;
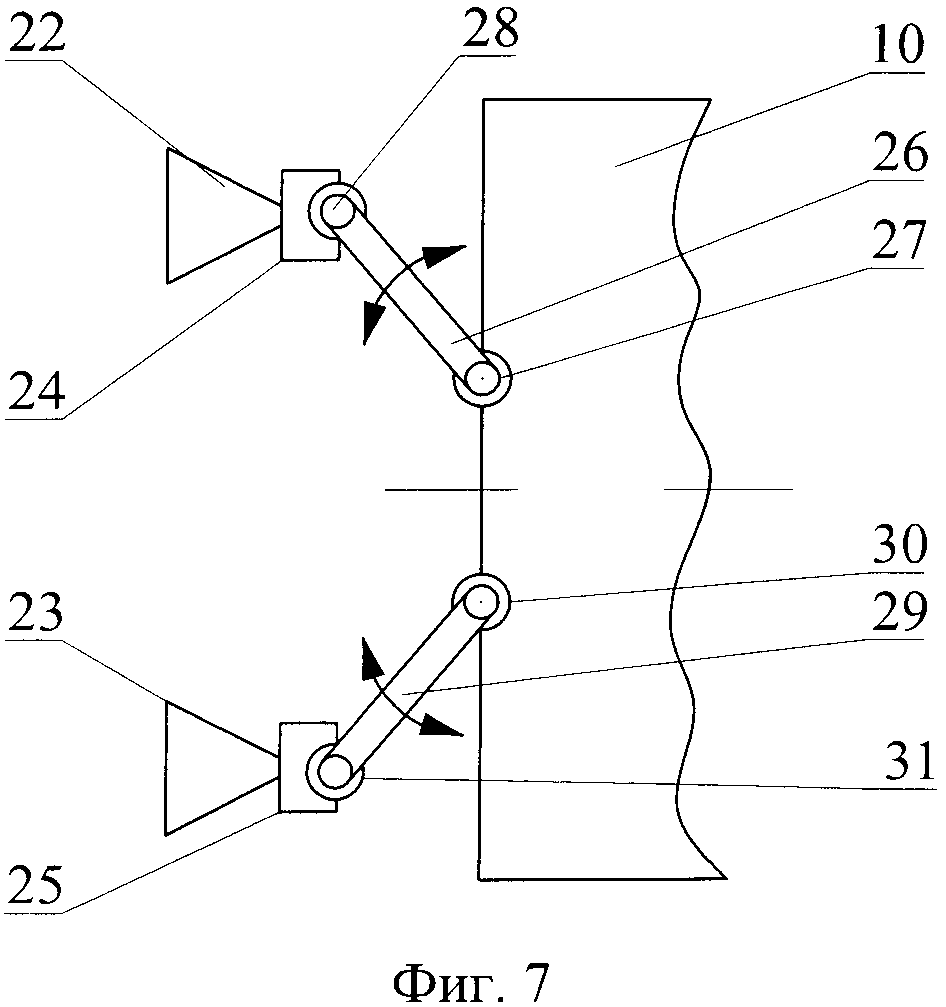
на фиг. 7 - вид сбоку на корпус КА с элементами ДУ при использовании двух двигателей, перемещаемых с помощью двух шарнирных механизмов, каждый из которых состоит из одной штанги и двух шарниров;
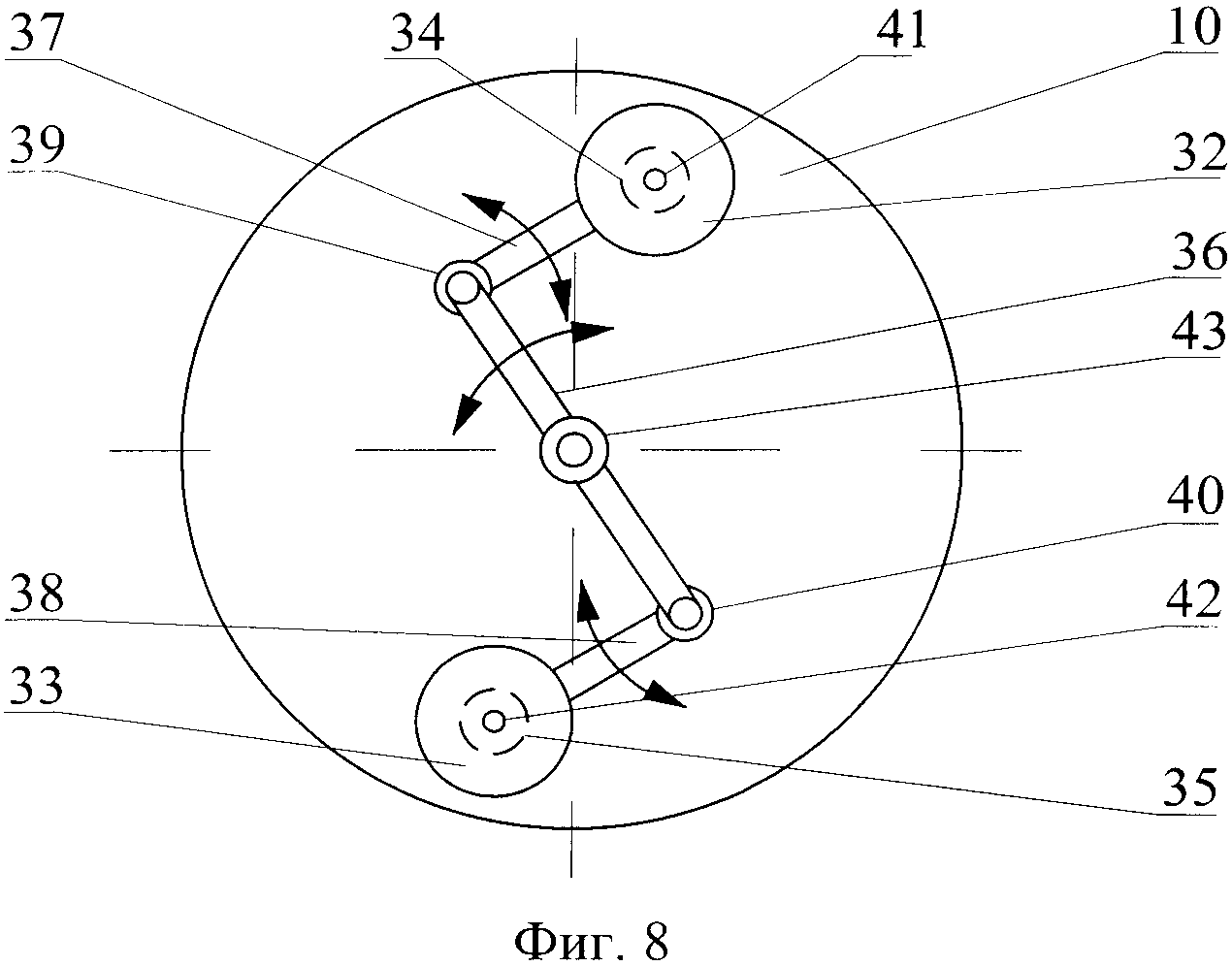
на фиг. 8 - схема размещения на торцевой части КА элементов ДУ при использовании двух двигателей, перемещаемых с помощью одного шарнирного механизма, состоящего из трех штанг и четырех шарниров;
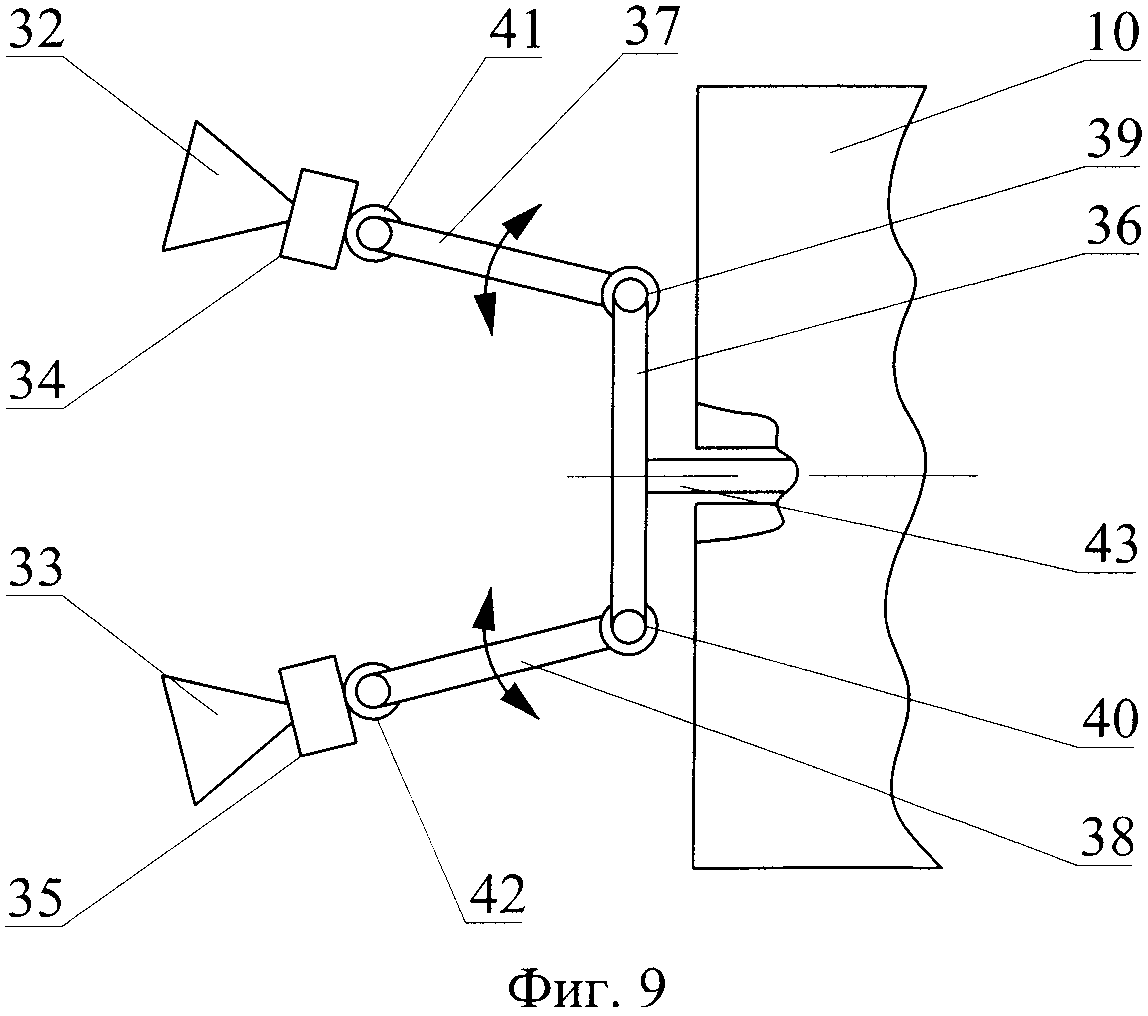
на фиг. 9 - вид сбоку на корпус КА с элементами ДУ при использовании двух двигателей, перемещаемых с помощью одного шарнирного механизма, состоящего из трех штанг и четырех шарниров;
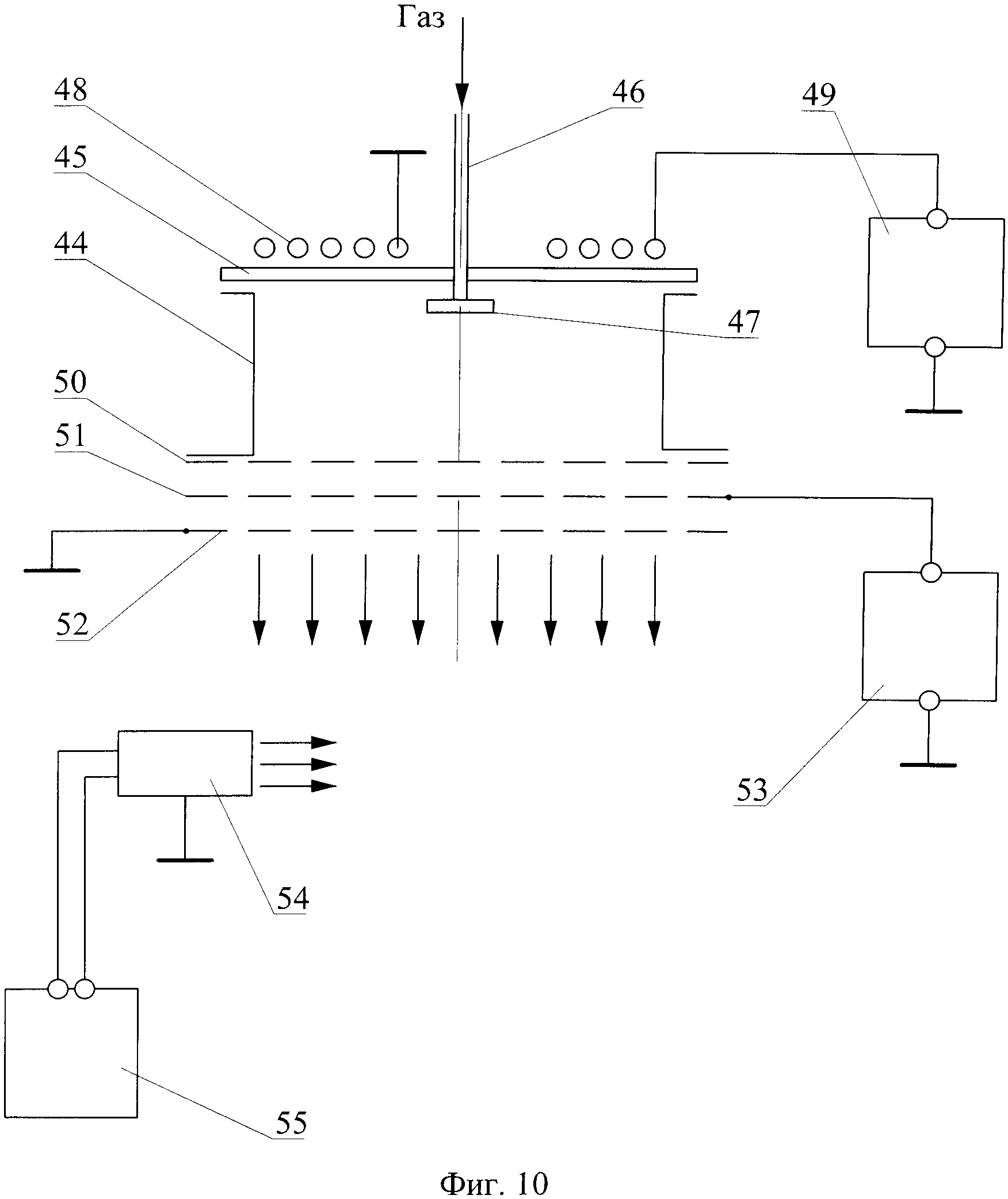
на фиг. 10 - схема ИП с газоразрядной камерой.
Развертываемая в космическом пространстве система бесконтактной транспортировки представляет собой сервисный КА 1 с центром масс 2, выводимый на исходную ГСО, на которой находится транспортируемый КО 3 с центром масс 4 (см. фиг. 1 чертежей). В рассматриваемом примере реализации способа транспортируемым КО 3 является выработавший свой ресурс неактивный телекоммуникационный спутник связи, находящийся на ГСО. На КА 1 установлены панели 5 фотоэлектрического преобразователя энергии (солнечные батареи), входящие в состав системы электроснабжения. С помощью панелей 5 обеспечивается электропитание бортового оборудования КА 1. Измерение координат КО 3 и расстояния между КА 1 и КО 3 производится с помощью бортовой радиолокационной системы КА 1 и оптических средств измерений (на чертеже не показаны).
На борту КА 1 установлена ИП 6, обеспечивающая формирование направленного квазинейтрального ионного пучка 7, который воздействует на поверхность корпуса КО 3. В результате воздействия ионного пучка 7 на центр масс 4 КО 3 действует сила F0 в заданном направлении. Для компенсации силы F1, действующей на центр масс 2 КА 1 при генерации ионного пучка 7, используется ДУ 8. Компенсация силы F1 обеспечивается в идеальных условиях тягой F2, создаваемой ДУ 8. С помощью ДУ 8 осуществляется также динамическая компенсация возмущающих знакопеременных сил FКА и моментов МКА, действующих на космический аппарат, ориентация КА 1 относительно транспортируемого КО 3 и движение КА 1 в заданном направлении транспортировки КО 3 на орбиту захоронения.
В реальных условиях при ориентации КА 1 относительно КО 3 учитывается не только действие на КА 1 возмущающих сил FКА и моментов МКА, но и действие на КО 3 возмущающих знакопеременных сил FКО и моментов МКО. В каждый текущий момент времени ДУ 8 создает результирующий вектор тяги F2B, компенсирующий возмущающие силы FКА, FКО и возмущающие моменты МКА, МКО. Величина, направление и точка приложения тяги F2B соответствуют расчетным данным бортовой системы управления КА 1.
ДУ 8, схема которой изображена на фиг. 2 и 3, содержит один ЭРД 9, перемещаемый относительно центра масс 2 с помощью шарнирного механизма, размещенного на корпусе 10 КА 1. ЭРД 9 установлен в узле крепления 11 с возможностью поворота в двух взаимно перпендикулярных плоскостях. Для этого узел крепления 11 снабжен карданным шарниром (на чертеже не показан)
Шарнирный механизм, предназначенный для перемещения ЭРД 9 относительно центра масс 2, включает в свой состав штангу 12 и два шарнира 13 и 14. Штанга 12 соединена с одной стороны с корпусом 10 через первый шарнир 13. С противоположной стороны штанга 12 соединена с узлом крепления 11 через второй шарнир 14.
ДУ 8, схема которой изображена на фиг. 4 и 5, содержит один ЭРД 15, перемещаемый относительно центра масс 2 с помощью шарнирного механизма, связанного с корпусом 10. ЭРД 15 установлен в узле крепления 16 с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью карданного шарнира (на чертеже не показан).
Шарнирный механизм, предназначенный для перемещения ЭРД 15 относительно центра масс 2, включает в свой состав две штанги 17 и 18 и три шарнира 19, 20 и 21. Первая штанга 17 соединена с одной стороны с корпусом 10 через первый шарнир 19. С противоположной стороны первая штанга 17 соединена с концевой частью второй штанги 18 через второй шарнир 20. Противоположная концевая часть второй штанги 18 соединена с узлом крепления 16 через третий шарнир 21. В упрощенном варианте конструкции шарнирного механизма штанги 17 и 18 могут перемещаться в одной плоскости для изменения положения ЭРД 15 относительно центра масс КА. Данная плоскость расположена ортогонально относительно оси, проходящей через центр масс КА в направлении вектора тяги F1. Перемещение ЭРД 15 относительно указанной плоскости производится с помощью шарнира 21.
ДУ 8, схема которой изображена на фиг. 6 и 7, содержит два ЭРД 22 и 23. Двигатели выполнены с возможностью перемещения относительно центра масс 2 с помощью двух отдельных шарнирных механизмов, размещенных на корпусе 10. ЭРД 22 и 23 установлены в соответствующих узлах крепления 24 и 25 с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью карданных шарниров (на чертеже не показаны).
Шарнирный механизм, предназначенный для перемещения ЭРД 22 относительно центра масс 2, включает в свой состав штангу 26 и два шарнира 27 и 28. Штанга 26 соединена с одной стороны с корпусом 10 через первый шарнир 27. С противоположной стороны штанга 26 соединена с узлом крепления 24 через второй шарнир 28.
Шарнирный механизм, предназначенный для перемещения ЭРД 23 относительно центра масс 2, включает в свой состав одну штангу 29 и два шарнира 30 и 31. Штанга 29 соединена с одной стороны с корпусом 10 через первый шарнир 30. С противоположной стороны штанга 29 соединена с узлом крепления 25 через второй шарнир 31.
Первые шарниры 27 и 30 двух шарнирных механизмов установлены на корпусе 10 диаметрально противоположно на расстоянии d0 относительно друг друга и на равном расстоянии d0/2 относительно продольной оси, проходящей через центр масс 2. Данное расположение обеспечивает независимое перемещение ЭРД 22 и 23 в двух пространственных полусферах.
ДУ 8, схема которой изображена на фиг. 8 и 9, содержит два ЭРД 32 и 33. Двигатели выполнены с возможностью перемещения относительно центра масс 2 с помощью одного шарнирного механизма, размещенного на корпусе 10. ЭРД 32 и 33 установлены в узлах крепления 34 и 35 с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью карданных шарниров (на чертеже не показаны).
Шарнирный механизм, предназначенный для перемещения ЭРД 32 и 33 относительно центра масс 2, включает в свой состав три штанги 36, 37 и 38 и четыре шарнира 39, 40, 41 и 42. Срединная точка первой штанги 36 установлена на оси вращения 43, расположенной соосно с осью, проходящей через центр масс 2 в направлении вектора тяги F1. Вторая штанга 37 соединена с концевой частью первой штанги 36 через первый шарнир 39. Противоположная часть штанги 36 соединена с узлом крепления 34 первого ЭРД 32 через второй шарнир 41. Третья штанга 38 соединена с противоположной концевой частью первой штанги 36 через третий шарнир 40. Противоположная часть третьей штанги 38 соединена с узлом крепления 35 второго ЭРД 33 через четвертый шарнир 42. В упрощенном варианте конструкции шарнирного механизма штанги 37 и 38 могут перемещаться относительно оси вращения 43 и, соответственно, относительно центра масс КА в одной плоскости, в которой вращается штанга 36. Данная плоскость расположена ортогонально относительно оси, проходящей через центр масс КА в направлении вектора тяги F1. Перемещение ЭРД 32 и 33 относительно указанной плоскости производится с помощью шарниров 41 и 42 соответственно.
ИП 6, изображенная на фиг. 10, содержит цилиндрическую газоразрядную камеру с открытой торцевой частью. Боковые стенки камеры образованы металлическим корпусом 44 цилиндрической формы. Плоская торцевая стенка 45 выполнена из материала, прозрачного для электромагнитного излучения. В рассматриваемом примере реализации изобретения стенка 45 выполнена из кварцевого стекла. Узел подачи газообразного рабочего вещества в газоразрядную камеру содержит патрубок 46, снабженный газоэлектрической развязкой, и соединенный с ним газораспределитель 47. Средство генерации электрического газового разряда выполнено в виде плоского индуктора 48, подключенного к высокочастотному источнику электропитания - ВЧ генератору 49.
Ионно-оптическая система ИП 6 включает в свой состав эмиссионный электрод 50, ускоряющий электрод 51 и замедляющий электрод 52. Электроды 50, 51 и 52 установлены с образованием пространственных зазоров между ближайшими электродами в направлении ускорения ионов. Эмиссионный электрод 50 выполнен в виде перфорированной диэлектрической пластины из окиси алюминия. Ускоряющий электрод 51 представляет собой двухслойную структуру, состоящую из перфорированной диэлектрической подложки с электропроводящим покрытием из молибдена. Диэлектрическая подложка электрода 51 изготовлена из окиси алюминия. Электропроводящее покрытие нанесено на поверхность диэлектрической подложки, обращенной к эмиссионному электроду 50. Противоположная поверхность диэлектрической подложки обращена к замедляющему электроду 52.
Электропроводящее молибденовое покрытие ускоряющего электрода 51 электрически соединено с отрицательным полюсом источника 53 ускоряющего напряжения. Замедляющий электрод 52 выполнен в виде перфорированной диэлектрической пластины из окиси алюминия. Отверстия в электродах 50, 51 и 52 расположены соосно.
За пределами области размещения электродов ионно-оптической системы установлен нейтрализатор пространственного заряда потока ионов. Нейтрализатор выполнен в виде плазменного источника электронов 54, который подключен к источнику электропитания 55.
Способ бесконтактной транспортировки космических объектов из защищаемой области космического пространства на орбиту захоронения осуществляется следующим образом.
Сервисный КА 1 выводится ракетой-носителем на расчетную геостационарную орбиту, на которой находится транспортируемый КО 3. После этого производится сближение КА 1 с транспортируемым КО 3 на заданное расстояние и ориентация КА 1. Сближение и ориентация производится с помощью ДУ 8 путем создания импульсов сил и моментов, действующих относительно центра масс 2. Измерение координат пространственного положения и расстояния между КА 1 и КО 3 осуществляется с помощью радиолокационной системы и оптических средств измерений, размещенных на борту КА 1.
Расстояние D между КА 1 и КО 3 выбирается из условия эффективного воздействия на поверхность КО 3 квазинейтральным ионным пучком 7, генерируемым ИП 6. Для рассматриваемого вида транспортируемых КО расстояние D выбирается в диапазоне от 4 до 8 характерных размеров L КО. При размере КО 3 L≅5 м расстояние между КА 1 и КО 3 должно быть в диапазоне от 20 до 40 м. Для использования импульса ионного пучка 7 с максимальной эффективностью при указанных расстояниях полуугол расходимости β/2 пучка должен быть не более 3°. С увеличением расстояния D расчетное значение полуугла расходимости β/2 ионного пучка 7 уменьшается.
Для воздействия на поверхность транспортируемого КО 3 квазинейтральным ионным пучком 7 используется ИП 6. В газоразрядной камере ИП 6 возбуждается индукционный ВЧ разряд. В качестве рабочего тела используется ксенон. Потребляемая электрическая мощность ИП 6 составляет ~2000 Вт. Импульс силы квазинейтрального ионного пучка 7 составляет ~60 мН при полуугле расходимости пучка β/2=2°. Энергия Е0 ионов в пучке равна ~4000 эВ, а их скорость - V0=76 км/с.
В результате воздействия квазинейтральным ионным пучком 7 на поверхность КО 3 на центр масс 4 действует сила F0, величина которой в идеальных условиях определяется следующим образом: F0=-kF1, где F1 - тяга, создаваемая ИП 6; k - коэффициент использования пучка для создания управляющего усилия F0. В случае перекрытия поверхностью корпуса КО 3 всей площади поверхности «пятна» пучка k≅1. Если поверхность корпуса КО 3 перекрывает поверхность «пятна» пучка частично, то величина коэффициента k выбирается в диапазоне: 0≤k≤1.
Для сохранения заданного расстояния D между КА 1 и КО 3 необходимо постоянно осуществлять динамическую компенсацию возмущающих сил и моментов, действующих на КА 1, и динамическую ориентацию КА 1 относительно транспортируемого КО 3. Компенсация сил и моментов производится с помощью ДУ 8, установленной на борту КА 1.
В идеальной ситуации, когда силы F1, F2 и F0 действуют вдоль одной прямой линии, для оценки средней величины тяги ДУ 8 используется условие равенства реактивных ускорений КО 3 и КА 1:
где F1 - тяга, создаваемая ИП 6; где F2 - тяга, создаваемая ДУ 8 для компенсации силы F1; mКА - масса КА 1, mКО - масса КО 3.
Если пренебречь иными возмущающими факторами, действующими на КА 1, то условие равенства реактивных ускорений КО 3 и КА 1 при нулевой начальной скорости КО 3 относительно КА 1 обеспечивает неизменность расстояния D в процессе выполнения маневра при бесконтактной транспортировке КО 3. Данное условие можно представить в следующем виде:
В реальных условиях необходимо учитывать дополнительные факторы, приводящие к возникновению возмущающих сил и моментов, действующих на КА 1 и транспортируемый КО 3. К числу таких факторов относятся следующие.
1. Взаимодействие ионов с поверхностью корпуса КО носит сложный физический характер. В зависимости от вида рабочего тела, энергии ионов, угла падения ионов на поверхность, материала поверхностного слоя и состояния поверхностного слоя корпуса КА возможны различные процессы взаимодействия ионов с поверхностью, в том числе распыление поверхностного слоя, отражение ионов от поверхности, внедрение ионов в поверхностный слой. Вследствие протекания данных процессов значение коэффициента k будет существенно отличаться от расчетной величины.
2. Поверхность взаимодействия с ионным пучком может иметь отверстия и/или открытые полости. В этом случае значение коэффициента k будет ниже расчетной величины.
3. При взаимодействии ионного пучка с поверхностью КО возникает составляющая силы (реакции) в плоскости, ортогональной направлению движения ионов, что приведет к смещению КО в боковом направлении.
4. В реальных условиях КО вращается, поэтому при взаимодействии ионов с поверхностью КО возникают дополнительные моменты сил. Из-за этого энергия ионного пучка будет частично расходоваться на изменение скорости вращения КО, а не на направленное перемещение КО в космическом пространстве.
В результате действия перечисленных выше факторов на КО 3 действуют силы не только в направлении квазинейтрального ионного пучка, но и в плоскости, ортогональной оси, проходящей через центр масс 4 в направлении вектора тяги, создаваемой ИП 6, и относительно указанной плоскости. Кроме того, в процессе ориентации необходимо периодически осуществлять разгрузку кинетических моментов двигателей-маховиков (гиродинов), которые компенсируют возмущающие моменты, действующие на КА 1. В ситуации, когда требуется постоянное парирование возмущающих моментов, двигатели-маховики, накапливая кинетический момент, могут выйти на режим насыщения. Разгрузка двигателей-маховиков производится за счет создания управляющего момента при включении двигателей ДУ 8 в соответствии с расчетными данными системы управления.
Бесконтактная транспортировка КО 3 с помощью КА 1 должна производиться в непрерывном режиме при перемещении связки, состоящей из КА 1 и КО 3, расположенных на расстоянии D друг от друга. Движение связки КА 1-КО 3 происходит по заданной траектории в направлении от защищаемой области пространства к орбите захоронения. Перемещение КА 1 осуществляется за счет действия на центр масс 2 результирующей силы ΔF=F2-F1. Перемещение КО 3 происходит под действием силы F0, приложенной к центру масс 4.
В реальных условиях для осуществления непрерывного управления движением и ориентацией КА 1 при бесконтактной транспортировке КО 3 необходимо обеспечить изменение направления вектора тяги F2B и точки его приложения в соответствии с расчетными данными системы управления. Динамическая компенсация возмущающих сил FКА, FКО и моментов МКА, МКО, а также ориентация КА 1 относительно КО 3 обеспечиваются за счет создания с помощью ДУ 8 в каждый текущий момент времени результирующей тяги F2B с заданным направлением и точкой приложения вектора тяги относительно центра масс 2. Данные характеристики тяги рассчитываются в динамическом режиме программным комплексом системы управления КА 1.
Управление движением и ориентацией КА 1 обеспечивается при включении ДУ 8, содержащей один или два ЭРД. При использовании одного двигателя ДУ 8 включает в свой состав двигатель СПД-100 и шарнирный механизм для перемещения двигателя относительно центра масс 2. Двигатель СПД-100 обладает следующими рабочими характеристиками: максимальная тяга - 83 мН, удельный импульс - 1500 с, потребляемая мощность - 1500 Вт.
При использовании для управления движением двух ЭРД ДУ 8 содержит два двигателя СПД-70 и один или два шарнирных механизма, которые обеспечивают независимое перемещение двигателей относительно центра масс 2. Двигатель СПД-70 обладает следующими рабочими характеристиками: максимальная тяга - 40 мН, удельный импульс - 1450 с, потребляемая мощность - 650 Вт.
Управление движением и ориентацией КА осуществляют путем изменения направления вектора тяги F2B и точки его приложения за счет перемещения двигателя в плоскости, ортогональной оси, проходящей через центр масс 2 в направлении вектора тяги F1, и относительно указанной плоскости. Перемещая двигатель в двух плоскостях относительно центра масс 2, можно управлять в широком диапазоне значений проекциями вектора тяги F2B на оси системы координат, связанной с центром масс 2. В этом случае появляется возможность управления не только проекциями тяги, но и моментами, действующими относительно центра масс 2.
За счет использования шарнирного механизма, обеспечивающего перемещение двигателя в плоскости, ортогональной оси, проходящей через центр масс 2 в направлении вектора тяги F1, и относительно указанной плоскости, повышается энергетическая эффективность управления движением и ориентацией КА. В данном случае эффективность управления существенно выше по сравнению с вариантом управления тягой двигателей посредством их поворота только в двух плоскостях относительно точки крепления. Полученный результат связан с возможностью изменения точки приложения вектора тяги двигателя относительно центра масс 2 независимо от направления вектора тяги.
Управление движением и ориентацией КА 1 производится путем углового перемещения штанги 12 шарнирного механизма в двух взаимно перпендикулярных плоскостях. С помощью шарнира 13 штанга 12 вместе с ЭРД 9 смещается в угловом направлении относительно точки крепления шарнира 13 в проекции на плоскость, ортогональную оси, проходящей через центр масс 2 в направлении вектора тяги F1 (см. фиг. 2 чертежей, направления углового перемещения показаны стрелками). Шарнир 13 обеспечивает также угловое перемещение штанги вместе с ЭРД 9 в плоскостях, которые проходят через указанную выше ось (см. фиг. 3 чертежей, направления углового перемещения показаны стрелками). С помощью шарнира 14 производится перемещение узла крепления 11 вместе с ЭРД 9 относительно штанги 12 и, соответственно, относительно центра масс 2.
Таким образом, шарнирный механизм, состоящий из одной штанги 12 и двух шарниров 13 и 14, обеспечивает изменение точки приложения вектора тяги ЭРД 9 и изменение направления вектора тяги за счет свободного перемещения в полусфере пространства двигателя вместе с его узлом крепления 11. Для оптимизации режимов управления движением и ориентации КА одновременно с перемещением ЭРД 9 изменяют величину тяги двигателя.
Кроме того, может производиться поворот ЭРД 9 в двух взаимно перпендикулярных плоскостях с помощью карданного шарнира, входящего в состав узла крепления 11. Карданный шарнир узла крепления позволяет управлять проекциями тяги F2B на оси координат, связанные с центром масс 2, и моментами относительно осей координат. При использовании указанных средств управления обеспечивается минимальный расход рабочего вещества в процессе выполнения расчетного маневра. В результате создаются требуемые составляющие вектора тяги путем фиксации пространственного положения двигателя. За счет управляемого перемещения и поворота двигателей практически исключаются потери тяги.
Посредством динамической компенсации возмущающих сил и моментов, действующих на КА 1, и динамической ориентации КА 1 относительно КО 3 осуществляется постоянное направленное воздействие квазинейтральным ионным пучком 7 на поверхность корпуса КО 3. Силовое воздействие F0 с поверхности КО 3 передается на центр масс 4, приводя в движение КО 3 в заданном направлении. При этом следует учитывать, что в реальных условиях, вследствие действия на КО 3 возмущающих сил FКО и моментов МКО, возникает составляющая силы, направленная ортогонально по отношению к ионному пучку 7. Из-за этого происходит смещение КО 3 в боковом направлении относительно ионного пучка 7. При действии возмущающей силы величиной ~20 мН в боковом направлении скорость смещения КО 3 за 10 суток достигнет 8,6 м/с. Для отслеживания ионным пучком 7 перемещения поверхности-мишени требуется непрерывная коррекция ориентации КА 1 относительно КО 3. Такая коррекция производится за счет изменения направления вектора тяги F2B и точки его приложения относительно центра масс 2.
С помощью радиолокационной системы и оптических средств измерений, размещенных на борту КА 1, осуществляется измерение текущих координат и дистанции D между КА 1 и КО 3. На основании получаемых данных система управления вырабатывает сигналы управления шарнирным механизмом и величиной тяги ЭРД 9. Управляющие воздействия обеспечивают управление движением и ориентацией КА 1 и наведение ионного пучка 7 на поверхность КО 3.
Ускоренные ионы передают свой импульс КО 3 при столкновении с его поверхностью. При взаимодействии ускоренных ионов пучка 7 с поверхностью КО 3 происходят различные физические процессы: упругое столкновение с поверхностью, распыление поверхностного слоя ускоренными ионами, внедрение ионов в поверхностный слой. Данные процессы влияют на эффективность передачи импульса и на преобразование энергии ускоренных ионов в управляющее усилие F0. Эффективность использования ионного пучка 7 для создания управляющего усилия F0 характеризуется величиной коэффициента k, который зависит от степени проявления перечисленных выше явлений.
Следует отметить, что импульс силы передается от ионного пучка 7 к поверхности объекта без физического контакта КА 1 с транспортируемым КО 3. При достаточно большой дистанции между КА 1 и КО 3 (D≅40 м) исключаются проблемы, связанные с возможностью столкновения космических тел. В частности, исключается необходимость выполнения сложных маневров, направленных на исключение столкновений тел.
В результате воздействия ионным пучком 7 на поверхность КО 3 создается силовое воздействие F0 на центр масс 4. Непрерывность силового воздействия F0 обеспечивается за счет динамической компенсации сил и моментов, действующих на КА 1 и КО 3, и поддержания заданной ориентации КА 1 относительно КО 3. Вследствие этого осуществляется перемещение (бесконтактная транспортировка) КО 3, находящегося в защищаемой области космического пространства вблизи ГСО, на орбиту захоронения, удаленную от ГСО (в направлении от Земли) не менее чем на 235 км. Данное расстояние обусловлено безопасностью функционирования активных КА на ГСО. После транспортировки КО 3 на орбиту захоронения КА 1 перемещается с помощью ДУ 8 по спиральной траектории на другую расчетную орбиту, на которой находится следующий подлежащий транспортировке КО.
Аналогичным образом производится бесконтактная транспортировка КО 3 при использовании других вариантов конструкции шарнирных механизмов. При использовании шарнирного механизма, содержащего две штанги 17 и 18 и три шарнира 19, 20 и 21 (см. фиг. 4 и 5 чертежей) управление движением и ориентацией КА 1 осуществляется путем углового перемещения штанг 17 и 18 в двух взаимно перпендикулярных плоскостях.
С помощью шарниров 19 и 21 штанги 17 и 18 вместе с ЭРД 15 смещаются в угловом направлении относительно точки крепления шарнира 19 (см. фиг. 4 чертежей, направления углового перемещения показаны стрелками). Смещение происходит в плоскости, ортогональной оси, проходящей через центр масс 2 в направлении вектора тяги F1. Шарниры 19 и 20 обеспечивают также угловое перемещение штанг 17 и 18 вместе с ЭРД 15 в плоскостях, в которых расположена указанная ось, проходящая через центр масс 2 в направлении вектора тяги F1 (см. фиг. 5 чертежей, направления углового перемещения показаны стрелками). С помощью шарнира 21 производится перемещение узла крепления 16 вместе с ЭРД 15 относительно штанги 18 и, соответственно, относительно центра масс 2.
Для упрощения управления движением и ориентацией КА можно перемещать штанги 17 и 18 шарнирного механизма в одной плоскости. Данная плоскость расположена ортогонально относительно оси, проходящей через центр масс КА в направлении вектора тяги F1. Перемещение ЭРД 15 относительно указанной плоскости производится путем вращения узла крепления 16 двигателя с помощью шарнира 21. В этом случае изменение положения ЭРД 15 осуществляется с помощью упрощенного варианта конструкции шарнирного механизма при минимальных затратах энергии на перемещение двигателя.
С целью оптимизации режимов управления движением и ориентации КА 1 одновременно с перемещением ЭРД 15 изменяют величину тяги двигателя. Производится также поворот ЭРД 15 в двух взаимно перпендикулярных плоскостях с помощью карданного шарнира, входящего в состав узла крепления 16.
Шарнирный механизм, состоящий из двух штанг 17 и 18 и трех шарниров 19, 20 и 21, обеспечивает изменение направления вектора тяги F2B и точки приложения вектора тяги за счет свободного перемещения в пространстве ЭРД 15. Шарнирный механизм позволяет управлять проекциями вектора тяги F2B на оси координат, связанные с центром масс 2, и моментами относительно указанных осей координат. Вследствие этого расчетный маневр выполняется с минимальным расходом рабочего вещества. ЭРД 15 устанавливается с помощью двухзвенного шарнирного механизма в заданное пространственное положение, обеспечивая расчетное направление вектора тяги и точку приложения вектора тяги в соответствии с программой управления движением и ориентацией КА 1.
Наиболее оптимальный режим бесконтактной транспортировки КО 3 достигается при использовании ДУ 8, включающей в свой состав два ЭРД 22 и 23 с независимыми механизмами перемещения двигателей. Каждый шарнирный механизм содержит одну штангу и два шарнира (см. фиг. 6 и 7 чертежей).
Управление движением и ориентацией КА 1 производится путем углового перемещения штанги 26 первого шарнирного механизма и штанги 29 второго шарнирного механизма. Каждая штанга перемещается в двух взаимно перпендикулярных плоскостях. С помощью шарнира 27 штанга 26 вместе с ЭРД 22 смещается в угловом направлении относительно точки крепления шарнира 27 в проекции на плоскость, ортогональную оси, проходящей через центр масс 2 в направлении вектора тяги F1 (см. фиг. 6 чертежей, направления углового перемещения показаны стрелками). Шарнир 27 обеспечивает также угловое перемещение штанги 26 вместе с ЭРД 22 в плоскостях, в которых расположена ось, проходящая через центр масс 2 в направлении вектора тяги F1 (см. фиг. 7 чертежей, направления углового перемещения показаны стрелками). С помощью шарнира 28 производится перемещение узла крепления 24 вместе с ЭРД 22 относительно штанги 26 и, соответственно, относительно центра масс 2.
Аналогичным образом осуществляется перемещение второго ЭРД 23. С помощью шарнира 30 штанга 29 вместе с ЭРД 23 смещается в угловом направлении относительно точки крепления шарнира 30 в проекции на плоскость, ортогональную оси, проходящей через центр масс 2 в направлении вектора тяги F1 (см. фиг. 6 чертежей, направления углового перемещения показаны стрелками). Шарнир 30 обеспечивает также угловое перемещение штанги 29 вместе с ЭРД 23 в плоскостях, в которых расположена ось, проходящая через центр масс 2 в направлении вектора тяги F1 (см. фиг. 7 чертежей, направления углового перемещения показаны стрелками). С помощью шарнира 31 производится перемещение узла крепления 25 относительно штанги 29 и, соответственно, относительно центра масс 2.
С целью оптимизации режимов управления движением и ориентации КА 1 одновременно с перемещением ЭРД 22 и 23 изменяют величину тяги каждого двигателя. За счет этого изменяется результирующая тяга F2B. В процессе управления движением и ориентацией КА 1 производится также поворот каждого из двух ЭРД 22 и 23 в двух взаимно перпендикулярных плоскостях с помощью карданных шарниров, входящих в состав узлов крепления 24 и 25.
Бесконтактная транспортировка КО 3 может осуществляться при использовании ДУ 8, включающей в свой состав два ЭРД 32 и 33 с общим механизмом перемещения двигателей. Шарнирный механизм содержит три штанги 36, 37 и 38 и четыре шарнира 39, 40, 41 и 42 (см. фиг. 8 и 9 чертежей).
Управление движением и ориентацией КА 1 производится путем вращения первой штанги 36 относительно срединной точки и углового перемещения второй и третьей штанги 37 и 38 в двух взаимно перпендикулярных плоскостях. Срединная точка штанги 36 соединена с осью вращения 43, расположенной соосно с осью, проходящей через центр масс 2 в направлении вектора тяги F1. Ось вращения 43 приводится в движение электроприводом, и штанга 36 смещается в угловом направлении относительно срединной точки в проекции на плоскость, ортогональную оси, проходящей через центр масс 2 в направлении вектора тяги F1 (см. фиг. 8 чертежей, направления углового перемещения показаны стрелками).
Шарнир 39 обеспечивает угловое перемещение второй штанги 37 вместе с ЭРД 32 в плоскостях, в которых расположена ось, проходящая через центр масс 2 в направлении вектора тяги F1. Шарнир 40 обеспечивает угловое перемещение третьей штанги 38 вместе с ЭРД 33 в плоскостях, в которых расположена ось, проходящая через центр масс 2 в направлении вектора тяги F1 (см. фиг. 9 чертежей, направления углового перемещения показаны стрелками).
С помощью шарнира 41 производится угловое перемещение узла крепления 34 вместе с ЭРД 32 относительно второй штанги 37 и, соответственно, относительно центра масс 2. С помощью шарнира 42 производится угловое перемещение узла крепления 35 вместе с ЭРД 33 относительно второй штанги 37 и, соответственно, относительно центра масс 2.
Для упрощения управления движением и ориентацией КА целесообразно перемещать штанги 37 и 38 в одной плоскости (в плоскости вращения) вместе с вращаемой штанной 36. Указанная плоскость расположена ортогонально относительно оси, проходящей через центр масс КА в направлении вектора тяги F1. Перемещение ЭРД 32 и 33 относительно указанной плоскости производится путем вращения узлов крепления 34 и 35 относительно штанг 37 и 38 с помощью шарниров 41 и 42. В этом случае изменение пространственного положения ЭРД 32 и 33 осуществляется при использовании упрощенного варианта конструкции шарнирного механизма и при минимальных затратах энергии на перемещение двигателей.
Для оптимизации режимов управления движением и ориентации КА 1 одновременно с перемещением ЭРД 32 и 33 изменяют величину тяги каждого двигателя. За счет этого изменяется результирующая тяга F2B. В процессе управления движением и ориентацией КА 1 производится также поворот каждого из двух ЭРД 32 и 33 в двух взаимно перпендикулярных плоскостях с помощью карданных шарниров, входящих в состав узлов крепления 34 и 35.
ИП 6 обеспечивает генерацию сфокусированного ионного пучка 7 для эффективного воздействия на поверхность КО 3 на дистанциях до 40 м. Диаметр ионного пучка 7 на выходе из ИП 6 составляет ~30 см. Полуугол β/72 расходимости ионного пучка на заданной дистанции не превышает 2°. При данных условиях обеспечивается фокусировка «пятна» ионного пучка 7 на заданном участке поверхности КО 3.
Формирование с помощью ИП 6 квазинейтрального ионного пучка 7, ориентированного в заданном направлении, осуществляется следующим образом.
В полость газоразрядной камеры ИП 6 (см. фиг. 10 чертежей) через патрубок 46 и соединенный с ним газораспределитель 47 подается газообразное рабочее вещество. В качестве рабочего вещества ИП 6 в рассматриваемом примере используется ксенон. Одновременно индуктор 48 подключается к ВЧ генератору 49. В результате протекания через индуктор 48 переменного тока высокой частоты в разрядной камере 1 зажигается индуктивный самостоятельный ВЧ разряд. Переменный ток, протекающий через индуктор 48, генерирует преимущественно аксиальное переменное магнитное поле, которое, в свою очередь, индуцирует в полости разрядной камеры преимущественно азимутальное электрическое поле. Под действием электрического поля в газообразной среде происходит ускорение и осцилляция электронов. Энергия электронов затрачивается на неупругие столкновения с атомами рабочего вещества, вызывая ступенчатую ионизацию нейтральных частиц газа.
Требуемая равномерность распределения объемной плотности заряженных частиц вдоль поперечного сечения газоразрядной камеры и, соответственно, равномерность распределения плотности тока извлекаемого ионного пучка вдоль его поперечного сечения обеспечивается за счет использования индуктора 48 плоской формы. Индуктор 48 выполнен в виде плоской спирали, внешняя часть которой подключена к ВЧ генератору 49. Внутренняя часть спирали заземлена. Индуктор 48 установлен на внешней стороне торцевой стенки 45, которая изготовлена из материала, прозрачного для электромагнитного излучения. Боковая поверхность газоразрядной камеры ограничена металлическим корпусом 44 цилиндрической формы.
При данном выполнении газоразрядной камеры и ВЧ индуктора ввод электромагнитной энергии в газоразрядный объем осуществляется через торцевую стенку 45 равномерно вдоль поперечного сечения камеры. Равномерный подвод электромагнитной энергии предопределяет объемный процесс ионизации рабочего вещества в газоразрядном объеме и равномерность плотности тока по сечению извлекаемого ионного пучка.
Потенциал плазмы, генерируемой в разрядной камере, задается электродом, который помещается в газоразрядный объем и подключается к положительному полюсу дополнительного источника напряжения (на чертеже не показаны). Данный электрод имеет положительный потенциал и не подвергается катодному распылению положительными ионами. Под действием разности потенциалов между газоразрядной плазмой и электродом происходит выход из плазмы избыточных электронов до достижения равенства потенциалов плазмы и электрода.
Ускорение и формирование ионного пучка осуществляется с помощью ионно-оптической системы, включающей в свой состав эмиссионный 50, ускоряющий 51 и замедляющий 52 электроды. На электропроводящий слой ускоряющего электрода 51 подается напряжение от источника 53 ускоряющего напряжения.
Ускорение ионного пучка происходит под действием ускоряющей разности потенциалов ΔUУ=UЭ+UУ, прикладываемой между газоразрядной плазмой и ускоряющим электродом 51. Потенциал плазмы определяется величиной положительного потенциала +UЭ на эмиссионном электроде 50. При этом электропроводящий слой ускоряющего электрода 51 находится под потенциалом -UУ.
Плазменный источник электронов 54 находится под нулевым потенциалом (ЦИЭ=0) и выполняет функцию нейтрализатора пространственного заряда ионного пучка. Электропитание плазменного источника электронов 54 осуществляется от источника 55. При включении плазменного источника электронов 54 производится инжекция электронов в поток ускоренных ионов за внешней поверхностью замедляющего электрода 52.
Представленные примеры осуществления изобретения подтверждают возможность повышения тяговой эффективности ДУ и эффективности использования рабочего вещества за счет снижения потерь тяги двигателей при динамической компенсации сил и моментов, действующих на КА, и ориентации КА. Решение данных технических задач направлено на повышение эффективности бесконтактной транспортировки КО из защищаемой области космического пространства на орбиту захоронения. Данный результат связан с возможностью управляемого изменения направления вектора тяги и точек приложения вектора тяги в широком диапазоне углов и координат.
Вышеописанные примеры осуществления способа бесконтактной транспортировки КО основываются на применении конкретных форм конструкции шарнирного механизма, обеспечивающего перемещение ЭРД, и конкретной конструкции ИП, установленной на борту КА. Вместе с тем представленное описание примеров реализации изобретения не исключает возможности достижения технического результата и в других частных случаях реализации способа в том виде, как он охарактеризован в независимом пункте формулы. В зависимости от конкретных решаемых задач выбирается количество используемых ЭРД, конструкция шарнирного механизма, обеспечивающего перемещение каждого двигателя, и конструкция ИП. В частности, возможны варианты реализации способа бесконтактной транспортировки КО, при которых не используется режим регулировки величины тяги двигателя. В этом случае управление движением и ориентацией КА будет осуществляться только за счет перемещения в пространстве ЭРД с помощью шарнирного механизма.
Для воздействия на поверхность транспортируемого КО могут применяться ИП различной конструкции, выбираемые в зависимости от формы, размеров и массы КО, а также в зависимости от требуемой скорости транспортировки КО. Способ может использоваться для транспортировки КО, имеющих различную форму и размеры, которые могут находиться не только на геостационарной, но и на низких околоземных орбитах.
Плазменный ускоритель с замкнутым дрейфом электронов
Эрозионный импульсный плазменный ускоритель
Эрозионный импульсный плазменный ускоритель
Способ изготовления электродов ионно-оптической системы
Распылитель жидкости
Огнетушащий состав
Система управления электрическим ракетным двигателем
Газоразрядный узел высокочастотного ионного двигателя
Способ выведения космического аппарата на геостационарную орбиту с использованием двигателей малой тяги
Способ интегральной диагностики вч индукционного газоразрядного устройства
Плазменный ускоритель с замкнутым дрейфом электронов
Эрозионный импульсный плазменный ускоритель
Эрозионный импульсный плазменный ускоритель
Способ изготовления электродов ионно-оптической системы
Распылитель жидкости
Огнетушащий состав
Система управления электрическим ракетным двигателем
Газоразрядный узел высокочастотного ионного двигателя
Способ выведения космического аппарата на геостационарную орбиту с использованием двигателей малой тяги
Способ интегральной диагностики вч индукционного газоразрядного устройства

