Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе эксплуатации транспортного средства. В частности, изобретение относится к способу и системе эксплуатации транспортного средства для движения транспортного средства вперед в ситуациях, когда преобладает требование пониженной мощности. Изобретение также относится к транспортному средству, компьютерной программе и компьютерному программному продукту, который реализует способ согласно настоящему изобретению.
УРОВЕНЬ ТЕХНИКИ
При эксплуатации тяжелых транспортных средств, например грузовиков, автобусов и т.п., транспортные предприятия по мере прохождения большего количества времени все больше подвергаются влиянию на рентабельность деятельности, в которой используется транспортное средство. В дополнение к затратам на покупку транспортного средства основные статьи расходов, связанные с текущей эксплуатацией, включают зарплату водителя, расходы на ремонт, техническое обслуживание и топливо для приведения транспортного средства в действие. Следовательно, важно удерживать связанные с этим расходы на каждом из этих участков настолько низкими, насколько это возможно.
В зависимости от типа транспортного средства значение различных факторов может изменяться, но потребление топлива, как правило, является одной из основных статей расходов. Использование мощности тяжелых транспортных средств зачастую является полным, что приводит к высокому общему потреблению топлива, поэтому любые средства сокращения потребления топлива, вероятно, окажут положительное влияние на рентабельность.
В целом тяжелые транспортные средства имеют много различных компоновок силовой передачи, но в связи с тем, что эксплуатация транспортного средства должна быть максимально удобной для водителя, часто используются автоматически управляемые коробки передач, посредством чего решения о переключении передач и их фактической реализации могут быть управляемыми посредством бортовой системы управления.
Тот факт, что автоматическое переключение передач в тяжелых транспортных средствах, как правило, управляется системой управления, часто обеспечивает возможность использования режима управления, в результате которого управление двигателем и коробкой передач частично основывается на сигналах водителя транспортного средства, но при этих условиях управление и, например, выбор передачи также в значительной степени определяются системой управления. По этой причине функции часто включаются в систему управления для улучшения потребления топлива по мере возможности эксплуатации транспортного средства таким образом, чтобы сберегать топливо, насколько это возможно. Эти функции могут, например, принимать форму функций для осуществления переключения передач и выбора передачи.
Другим примером такой функции является та, посредством которой двигатель транспортного средства на нисходящем уклоне отсоединяется от ведущих колес, когда необходимость предоставления крутящего момента для поддержания скорости транспортного средства снижается. Впоследствии силовая передача транспортного средства вновь вводится в работу, например, когда водитель нажимает на педаль газа или педаль тормоза.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание способа эксплуатации транспортного средства, который решает вышеуказанную проблему. Эта задача решается способом по пункту 1 формулы изобретения.
Настоящее изобретение относится к способу эксплуатации транспортного средства в случаях, когда транспортное средство имеет двигатель внутреннего сгорания, избирательно присоединяемый к по меньшей мере одному ведущему валу для сообщения движущей силы ведущему валу для движения транспортного средства вперед, транспортное средство выполнено с возможностью эксплуатации в первом режиме, в котором двигатель присоединен к ведущему валу и подача топлива в двигатель по существу прекращена, и во втором режиме, в котором двигатель отсоединен от по меньшей мере одного ведущего вала. В ситуации, когда транспортное средство движется или будет двигаться по нисходящему уклону, способ состоит в том, что
определяют, приведет ли эксплуатация транспортного средства в первом режиме на нисходящем уклоне к повышению скорости транспортного средства, и
эксплуатируют транспортное средство во втором режиме, если его эксплуатация в первом режиме приведет к повышению скорости транспортного средства.
Это дает преимущество в том, что потребление топлива транспортным средством может дополнительно сокращаться по сравнению с ранее достигнутым сокращением посредством предыдущего уровня техники. Согласно настоящему изобретению это будет сделано путем отсоединения двигателя от ведущих колес транспортного средства (ведущего или ведущих валов) даже в тех ситуациях, когда ранее было очевидно предусмотрено, что транспортное средство должно эксплуатироваться с двигателем, соединенным с ведущим валом без подачи топлива.
Хотя во многих случаях обычные функции отсоединения работают хорошо, авторы настоящего изобретения обнаружили, что ситуации, в которых потребление топлива транспортным средством, приводимым в действие двигателем внутреннего сгорания, на нисходящем уклоне может дополнительно сокращаться, таким образом, достигаются посредством вышеописанной системы.
Как будет объяснено ниже, с точки зрения экономии топлива является более выгодной эксплуатация транспортного средства с выведенной из работы силовой передачей даже в тех ситуациях, когда транспортное средство будет ускоряться, даже когда двигатель подсоединен к ведущим колесам транспортного средства и в то же время подача топлива отключена.
Однако настоящее изобретение приводит к более низкому потреблению топлива. Причина заключается в том, что необходимо поддерживать отсоединенный двигатель эксплуатируемым в противовес тому, что с отсоединенным двигателем транспортное средство может передвигаться на длительное расстояние за пределы окончания нисходящего уклона. Это происходит отчасти потому, что транспортное средство достигнет более высокой скорости на спуске с отсоединенным двигателем, чем с двигателем, соединенным с ведущим валом, но без подачи топлива.
В дополнение, сила, которая противодействует движению транспортного средства, будет меньше, когда двигатель отсоединен от ведущего вала (поскольку нет никакой силы торможения двигателем для противодействия движению транспортного средства вперед), что означает, что транспортное средство будет замедлять движение медленнее, когда оно достигнет окончания нисходящего уклона. Это, в свою очередь, означает, что в случаях, когда транспортное средство находится в конце нисходящего уклона, оно движется быстрее чем, например, на скорости, заданной автоматом постоянной скорости, оно может передвигаться на большее расстояние после окончания нисходящего уклона до того, как его скорость упадет до заданной скорости, и поэтому силовая передача вводится в работу (присоединяет двигатель к по меньшей мере одному ведущему валу), чтобы побудить двигатель предоставить транспортному средству тяговое усилие в направлении движения, что приводит к сокращению потребления топлива.
Согласно варианту осуществления настоящего изобретения транспортное средство эксплуатируется таким образом, что его двигатель всегда отсоединен от ведущих колес, когда транспортное средство достигает окончания нисходящего уклона по меньшей мере до тех пор, пока преобладающая скорость транспортного средства превышает заданную скорость. Это означает, что даже если по какой-либо причине транспортное средство движется с двигателем, присоединенным к ведущим колесам, в конце нисходящего уклона силовая передача будет выводиться из работы, поскольку это приводит к снижению потребления топлива до местоположения, где скорость при движении транспортного средства накатом падает до заданной скорости. Согласно варианту осуществления скорости транспортного средства после нисходящего уклона предоставляется возможность падать ниже заданной скорости перед тем, как силовая передача вновь будет введена в работу.
Другие признаки настоящего изобретения и его преимущества указаны посредством подробного описания примеров вариантов осуществления, изложенных ниже, и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1А изображает силовую передачу в транспортном средстве, в котором может быть использовано настоящее изобретение;
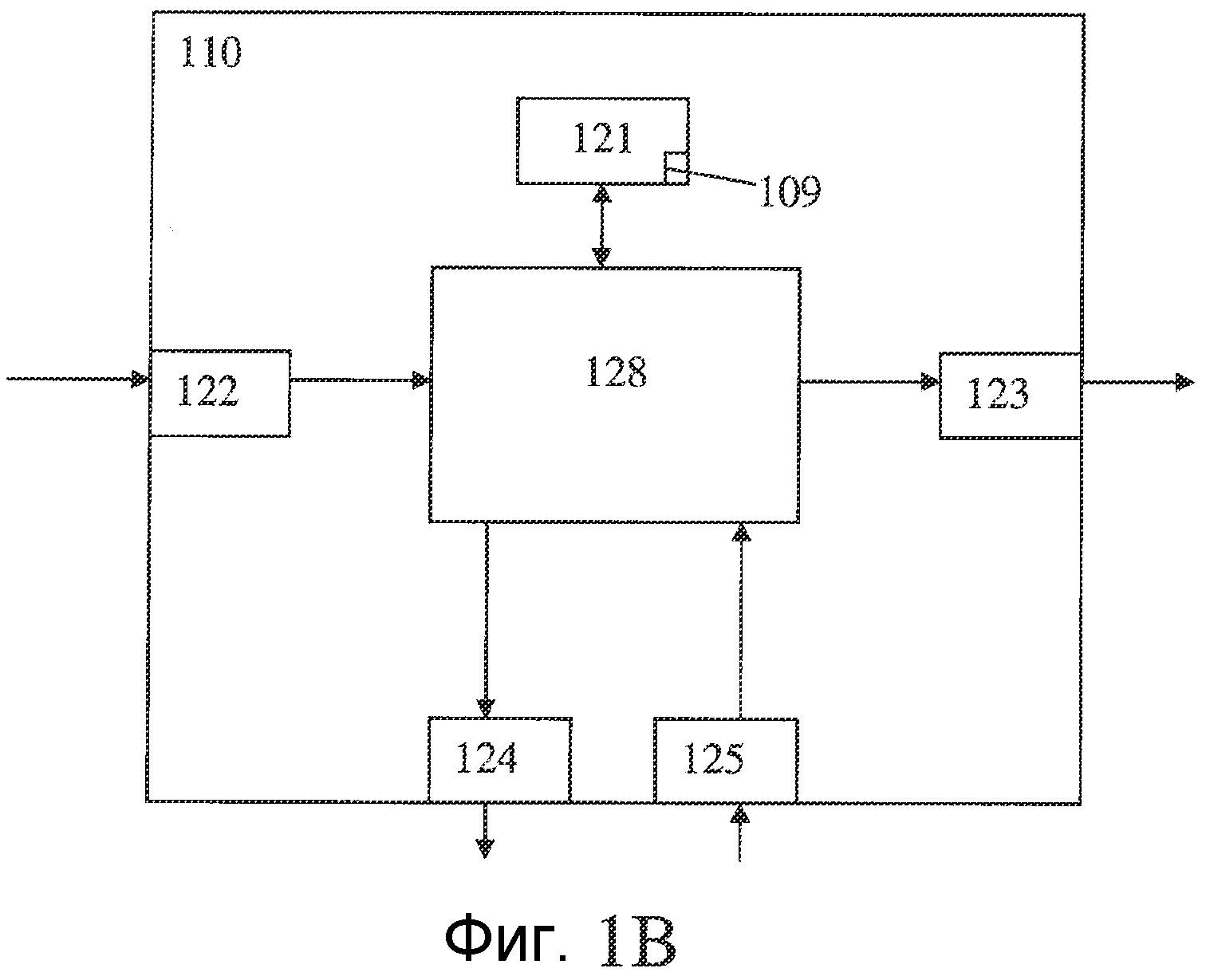
Фиг.1В изображает блок управления в системе управления транспортным средством;
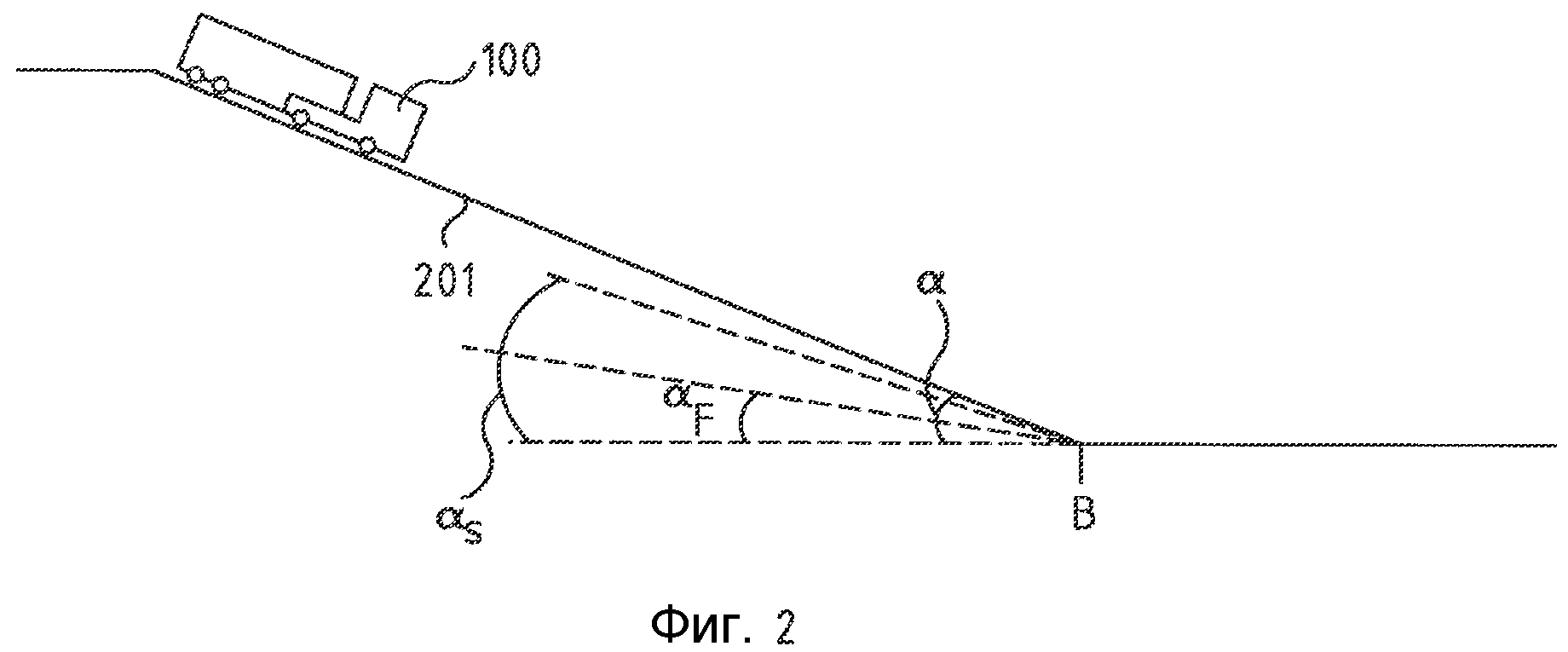
Фиг.2 изображает пример нисходящего уклона, к которому может применяться настоящее изобретение;
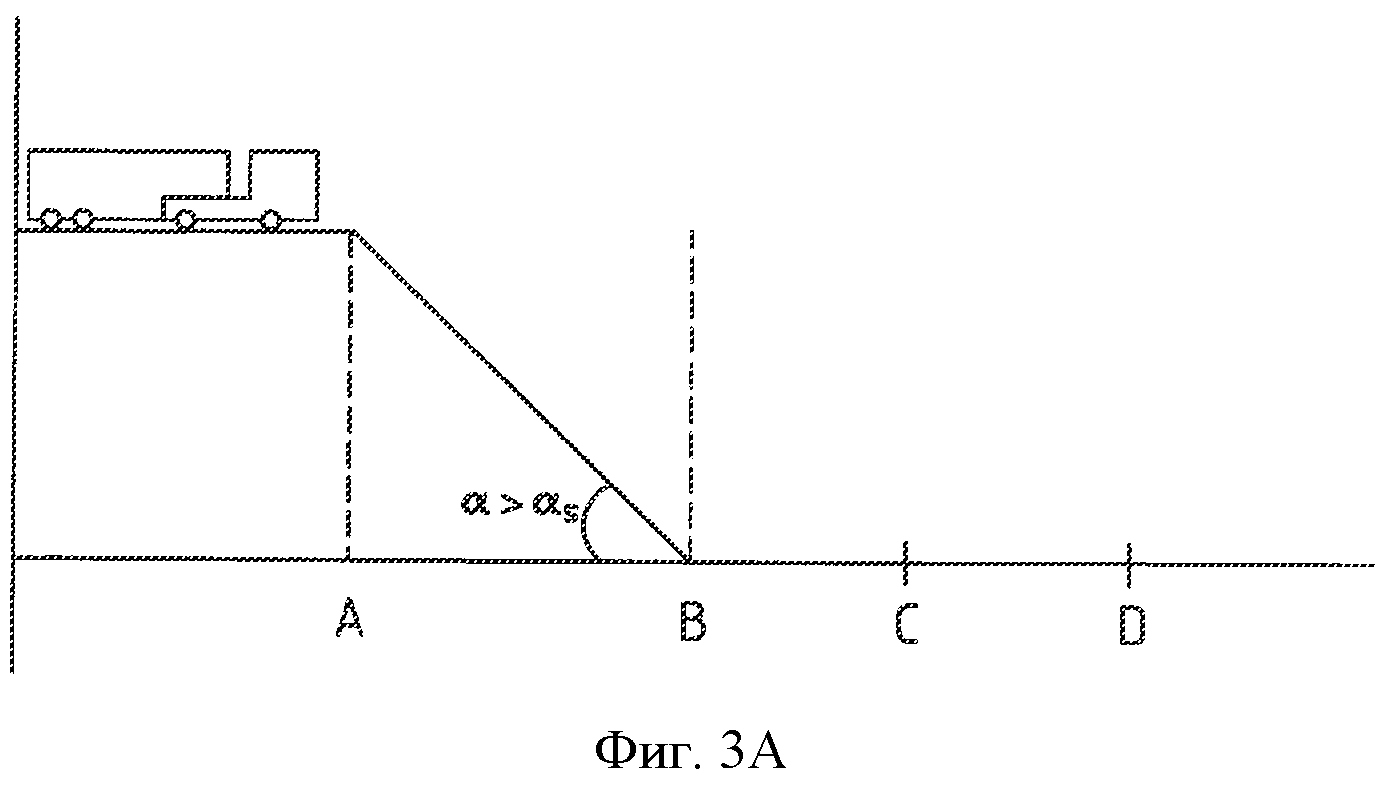
Фиг.3А изображает транспортное средство на нисходящем уклоне с таким углом наклона, что транспортное средство будет ускоряться как при движении накатом, так и при торможении двигателем;
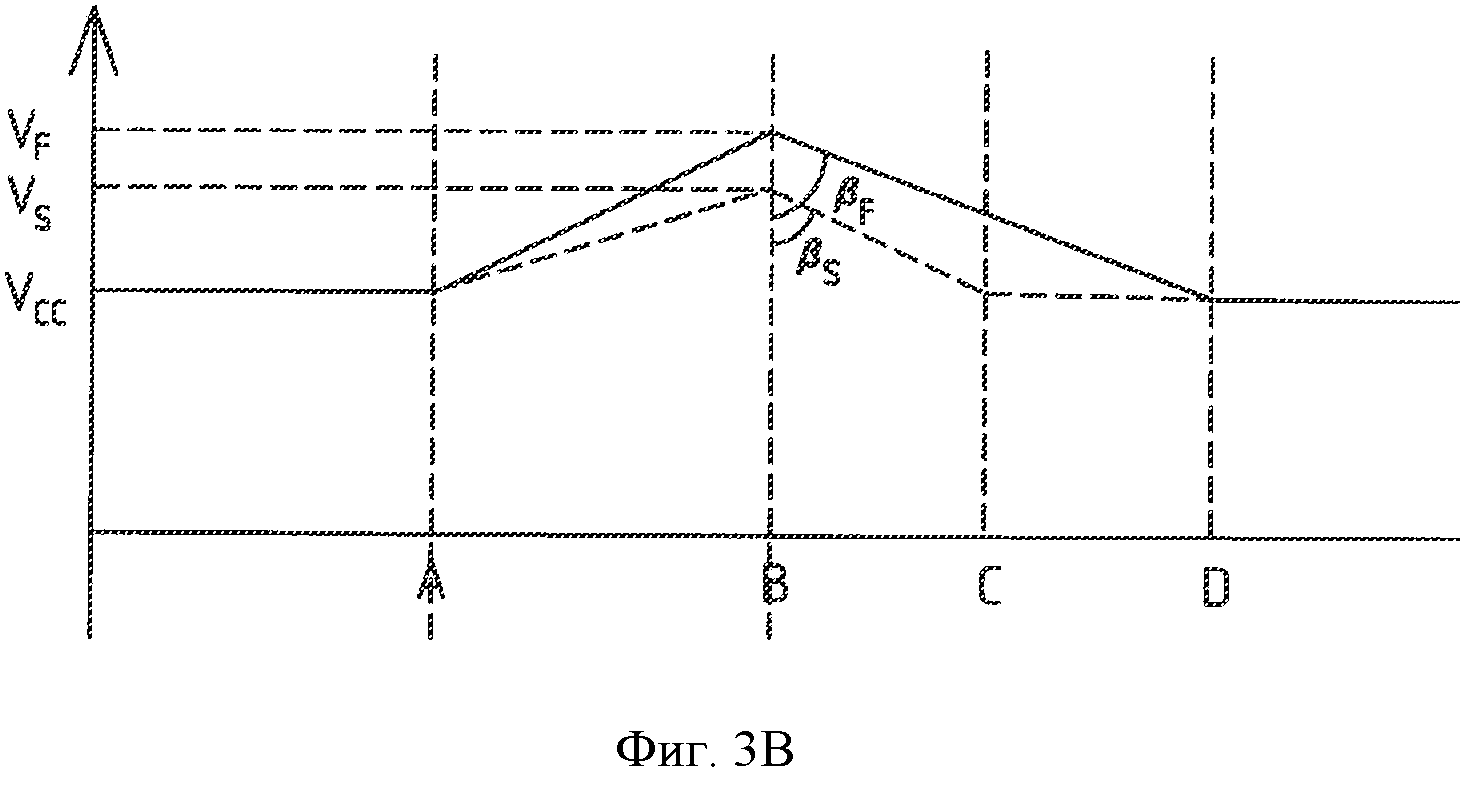
Фиг.3В схематически изображает соответствующие скорости транспортного средства при движении накатом и при торможении двигателем на нисходящем уклоне, изображенном на Фиг.3А;
Фиг.3С схематически изображает соответствующие потребления топлива транспортным средством, изображенным на Фиг.3А, при движении накатом и при торможении двигателем;
Фиг.4 иллюстрирует пример способа согласно настоящему изобретению.
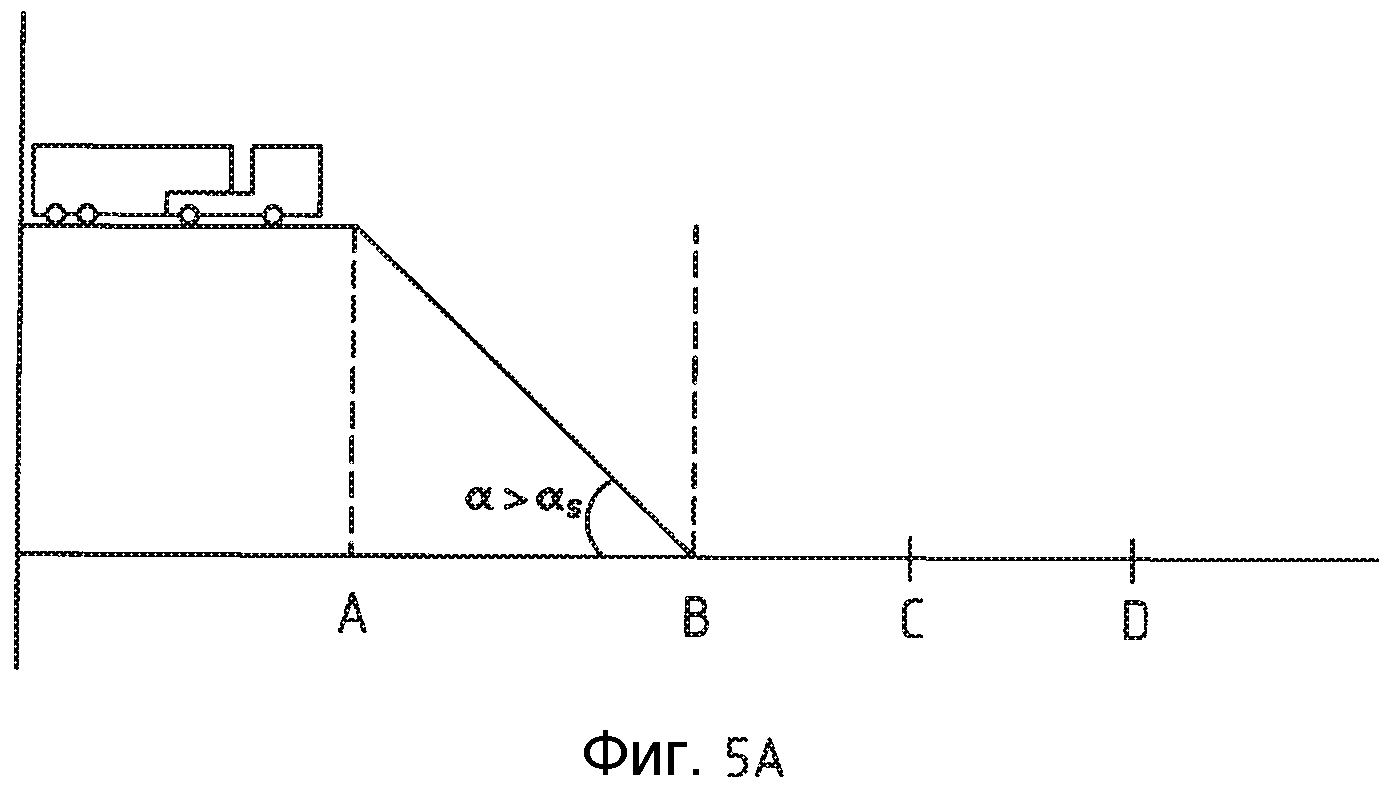
Фиг.5А изображает транспортное средство на еще одном нисходящем уклоне с таким углом наклона, что транспортное средство будет ускоряться как при движении накатом, так и при торможении двигателем;
Фиг.5В схематически изображает скорость транспортного средства при движении накатом на нисходящем уклоне, изображенном на Фиг.5А.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
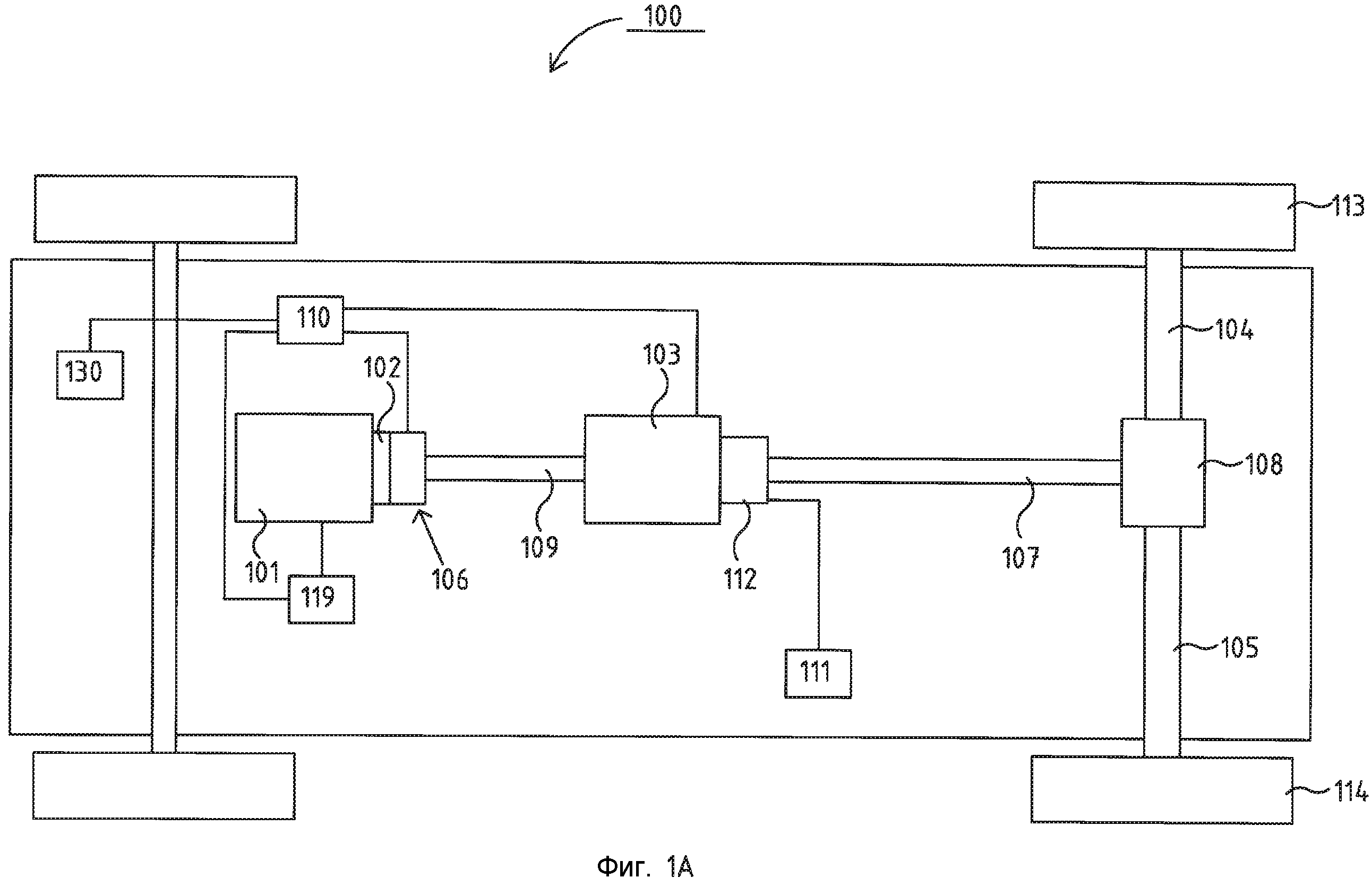
Фиг.1А схематически изображает силовую передачу в транспортном средстве 100 согласно варианту осуществления настоящего изобретения. Силовая передача содержит двигатель 101 внутреннего сгорания, который присоединен обычным способом посредством выходного вала двигателя, обычно посредством маховика 102, к входному валу 109 коробки 103 передач посредством муфты 106. Муфта, например, может принимать форму муфты с автоматическим управлением и может быть управляемой посредством системы управления транспортным средством через блок 110 управления. Блок 110 управления также управляет коробкой 103 передач. Транспортное средство 100 дополнительно содержит ведущие валы 104, 105, которые присоединены к ведущим колесам 113, 114 транспортного средства и приводятся в движение посредством выходного вала 107 коробки 103 передач посредством шестерни оси 108, например, простого дифференциала.
Транспортное средство 100 дополнительно содержит различные другие системы торможения, например, простую рабочую систему торможения (не отображена). Рабочая система торможения управляется системой управления транспортным средством посредством блока 111 управления тормозами, который обычным способом посылает сигналы на, например, регулятор или регуляторы, которые регулируют усилие торможения в рабочей системе торможения.
Блок 111 управления тормозами может также быть приспособлен к управлению другими бортовыми системами торможения транспортного средства, а также рабочей системой торможения транспортного средства. Тяжелые транспортные средства часто снабжены дополнительными системами торможения, например в виде обычных замедлителей 112 и/или других дополнительных систем торможения, таких как различные виды систем дросселирования выхлопа при торможении двигателем, электромагнитными системами торможения и тормозами двигателя. На основании сигналов, инициируемых водителем транспортного средства и/или другими блоками управления, блок 111 управления (или какой-нибудь другой подходящий блок управления) отправляет сигналы управления на подходящие блоки системы, чтобы истребовать желаемую силу торможения от требуемых систем торможения. Дополнительными системами торможения может также непосредственно управлять водитель, например посредством кнопок или педалей, в случае, когда педаль или рычаг непосредственно присоединены к еще одному блоку управления, отправляющему информацию, например, на блок управления тормозом-замедлителем.
Системы управления в современных транспортных средствах в целом содержат системы коммуникационных шин, состоящие из одной или более коммуникационных шин, для соединения нескольких электронных блоков управления (ECU) вместе или контроллеров и различных бортовых компонентов транспортного средства. Такая система управления может содержать большое количество блоков управления, и ответственность за конкретную функцию может быть разделена между двумя или более из них. Вследствие этого транспортные средства данного типа, имеющие отношение к материалам настоящей заявки, часто предусмотрены со значительно большим количеством блоков управления, чем изображено на Фиг.1A, что обязательно будет принято во внимание специалистом в данной области техники.
Согласно варианту осуществления настоящего изобретения транспортное средство также предусмотрено с блоком 130 управления, в котором используется функция упреждения, например, реализован так называемый автомат постоянной скорости с функцией упреждения (LACC). LACC является автоматом постоянной скорости, который использует знание о предстоящих участках дороги (знание о характере предстоящей дороги для транспортного средства) для определений согласно изобретению. Характеристика участка дороги впереди может, например, содержать преобладающую топологию, кривизну дороги, дорожную ситуацию, состояние дороги и ограничения скорости для участка, лежащего впереди, а также дорожных знаков, расположенных рядом с дорогой.
Эти данные могут, например, быть получены на основании информации о местоположении, например, в виде информации из подходящей системы позиционирования и/или навигационной системы, такой как спутниковая навигационная система, например GPS (глобальная система позиционирования) информация, картографические данные и/или топографические картографические данные. Также могут быть использованы прогнозы погоды, когда, например, сильный попутный/встречный ветер может повлиять на тяговое усилие, требуемое для движения транспортного средства вперед.
В изображенном варианте осуществления настоящее изобретение реализовано в блоке 110 управления, но может также быть реализовано полностью или частично в одном или нескольких других блоках управления, уже находящихся на борту транспортного средства или блоке управления, рассматриваемых в настоящем изобретении. Управление, осуществляемое блоком 110 управления посредством коробки 103 передач, также, вероятно, будет зависеть не только, например, от блока 119 управления двигателем, но также от информации, принятой из одного или многих других бортовых блоков управления транспортного средства.
Блоки управления данного типа по настоящему изобретению обычно приспособлены к приему сигналов датчиков из различных частей транспортного средства, например, блок 110 управления может принимать сигналы датчиков коробки 103 передач и сигналы, например, блока 112 управления тормозами и блока 119 управления двигателем. Блоки управления данного типа по настоящему изобретению также обычно приспособлены к передаче сигналов управления на различные части и узлы транспортного средства. В настоящем примере блок 111 управления передает сигналы на различные устройства управления для того, чтобы потребовать необходимые передаточные числа и размыкание/смыкание муфты 106.
Управление часто регулируется посредством программно-реализованной команды, обычно в виде компьютерной программы, которая при выполнении на компьютере или блоке управления, побуждает компьютер/блок управления осуществлять желаемые формы управляющего воздействия, например, этапы способа, согласно настоящему изобретению. Компьютерная программа обычно принимает форму компьютерного программного продукта 129, который хранится на цифровом носителе 121 данных (см. Фиг.1В), например, ROM (постоянном запоминающем устройстве), PROM (программируемом постоянном запоминающем устройстве), EPROM (электрически стираемом программируемом ПЗУ), флэш-памяти, EEPROM (электронно-перепрограммируемой постоянной памяти), жестком диске и т.д. или соединенным с блоком управления, и который реализуется посредством блока управления. Поэтому поведение транспортного средства в конкретной ситуации можно корректировать посредством изменения инструкций компьютерной программы.
Пример блока управления (блока 110 управления) изображен схематически на Фиг.1В и может содержать вычислительное устройство 128, которое может, например, принимать форму какого-нибудь подходящего типа процессора или микрокомпьютера, например, схемы для цифрового сигнального процессора (DSP) или схемы с заранее определенной функцией (специализированной интегральной схемы, ASIC). Вычислительное устройство 128 подключается к запоминающему устройству 121, которое предусматривается, например, с сохраненной управляющей программой 129, и/или сохраненным данным, которые необходимы вычислительному устройству для того, чтобы иметь возможность выполнять вычисления. Вычислительное устройство 128 также скомпоновано для того, чтобы сохранять частные или окончательные результаты вычислений в запоминающем устройстве 121.
Блок управления дополнительно предусмотрен с соответствующими устройствами 122, 123, 124, 125 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать формы сигнала, импульсы или другие характерные свойства, которые принимающие устройства 122, 125 входного сигнала могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые может обрабатывать вычислительное устройство 128. По этой причине сигналы передаются на вычислительное устройство 128. Передающие устройства 123, 124 выходного сигнала выполнены с возможностью преобразования сигналов, принятых из вычислительного устройства 128 для того, чтобы, например, посредством их модуляции создать выходные сигналы, которые могут передаваться в другие части системы управления транспортным средством и/или узлу/узлам, для которых предназначены данные сигналы. Каждое из соединений с соответствующими устройствами для приема и передачи входных и выходных сигналов может принимать форму одного или более из числа кабелей, шину передачи данных, например, CAN (сети контроллеров) шины, MOST (передачи данных мультимедийных систем) шины или шины другой конфигурации, или беспроводного соединения.
Как упоминалось выше, когда транспортное средство 100 находится в движении, существуют ситуации, при которых может быть выгодным отсоединять двигатель 101 от ведущих колес 113, 114, тем самым выводя из работы силовую передачу. Это отсоединение выведением силовой передачи из работы может достигаться, например, за счет переключения коробки 103 передач в нейтральное положение или путем размыкания муфты 106. Отсоединение двигателя от ведущих колес 113, 114, когда транспортное средство находится в движении, указывается ниже ссылкой как движение накатом. Ранее движение накатом использовалось только тогда, когда преобладали определенные условия. Согласно настоящему изобретению движение накатом также возможно в ситуациях, когда оно ранее не использовалось.
Теперь оно будет проиллюстрировано со ссылкой на Фиг.2, в которой транспортное средство 100 находится в начале нисходящего уклона 201. В варианте осуществления изображаемый нисходящий уклон имеет постоянный угол наклона α. В зависимости от величины угла транспортное средство 100 будет подвергаться воздействию в результате большего или меньшего положительного ускорения в направлении его движения, т.е. угол наклона будет побуждать силу тяжести прикладывать составляющую положительного ускорения в направлении движения транспортного средства, тем самым содействуя движению транспортного средства и, следовательно, сокращению или полному исключению, в зависимости от угла наклона, необходимости движущей силы двигателя 101.
По этой причине, как ранее упоминалось, на нисходящем уклоне часто принимаются меры по снижению потребления топлива транспортным средством. Кроме того, эксплуатируют транспортное средство в режиме движения накатом, такая мера принимает форму эксплуатации с введенной в работу силовой передачей, т.е. с двигателем, присоединенным к ведущим колесам, в то же время подача топлива к двигателю отключена. Преимущество этого режима эксплуатации транспортного средства заключается в том, что как только отключается подача топлива в двигатель, его потребление топлива становится нулевым. Эта мера означает, что двигатель будет приводиться в действие ведущими колесами посредством силовой передачи, состояние известное как "торможение двигателем", при котором внутренние потери двигателя приводят к усилию торможения, т.е. транспортное средство тормозит двигателем.
Внутренние потери двигателя, как правило, относятся к частоте его вращения таким образом, что они увеличиваются с повышением частоты вращения двигателя, и, следовательно, сила торможения двигателем также, как и торможение двигателем управляется на такой высокой передаче, насколько возможно сцепление в коробке передач (т.е. в таком низком передаточном отношении, насколько это возможно), чтобы снизить частоту вращения двигателя, а следовательно, и его потери во время торможения двигателем.
Однако в случае движения накатом ведущие колеса не подвергаются какому-либо эффекту торможения двигателем, что означает, что транспортное средство будет двигаться по нисходящему склону более свободно и тем самым достигать более высокой скорости в конце нисходящего уклона по сравнению с торможением двигателем. Однако это повышение скорости достигается за счет потребления топлива, необходимого для поддержания эксплуатации двигателя на холостом ходу.
В зависимости от величины угла α наклона транспортное средство будет вести себя по-разному, когда соответственно будет эксплуатироваться в первом режиме М1, в котором двигатель осуществляет торможение двигателем, и во втором режиме М2, в котором транспортное средство осуществляет движение накатом. Если угол α на Фиг.2 является меньшим, чем угол αF, транспортное средство будет замедляться как при торможении двигателем, так и при движении накатом (хотя при движении накатом оно не будет замедляться так, как при торможении двигателем). Если α=αF, транспортное средство будет продолжать замедляться при торможении двигателем, но его ускорение во время движения накатом будет нулевым, т.е. во время движения транспортного средства накатом данный постоянный уклон с данным углом (αF) будет сохранять скорость, которую имело в начале нисходящего уклона. Если угол впоследствии увеличивается до α>αF, транспортное средство с отсоединенным двигателем при движении на спуске будет ускоряться и поэтому достигать скорости в конце нисходящего уклона, которая превышает ту, которую он имел в начале нисходящего уклона. Увеличивающийся угол α приведет к большему ускорению, когда силовая передача выведена из работы, в то время как замедление во время торможения двигателем также становится все меньше и меньше. Если угол α составляет αs, который является большим углом, чем αF, ускорение транспортного средства во время торможения двигателем будет нулевым, т.е. транспортное средство будет поддерживать свою скорость даже при торможении двигателем. Наконец, если угол α больше, чем as, транспортное средство будет ускоряться как при торможении двигателем, так и при движении накатом.
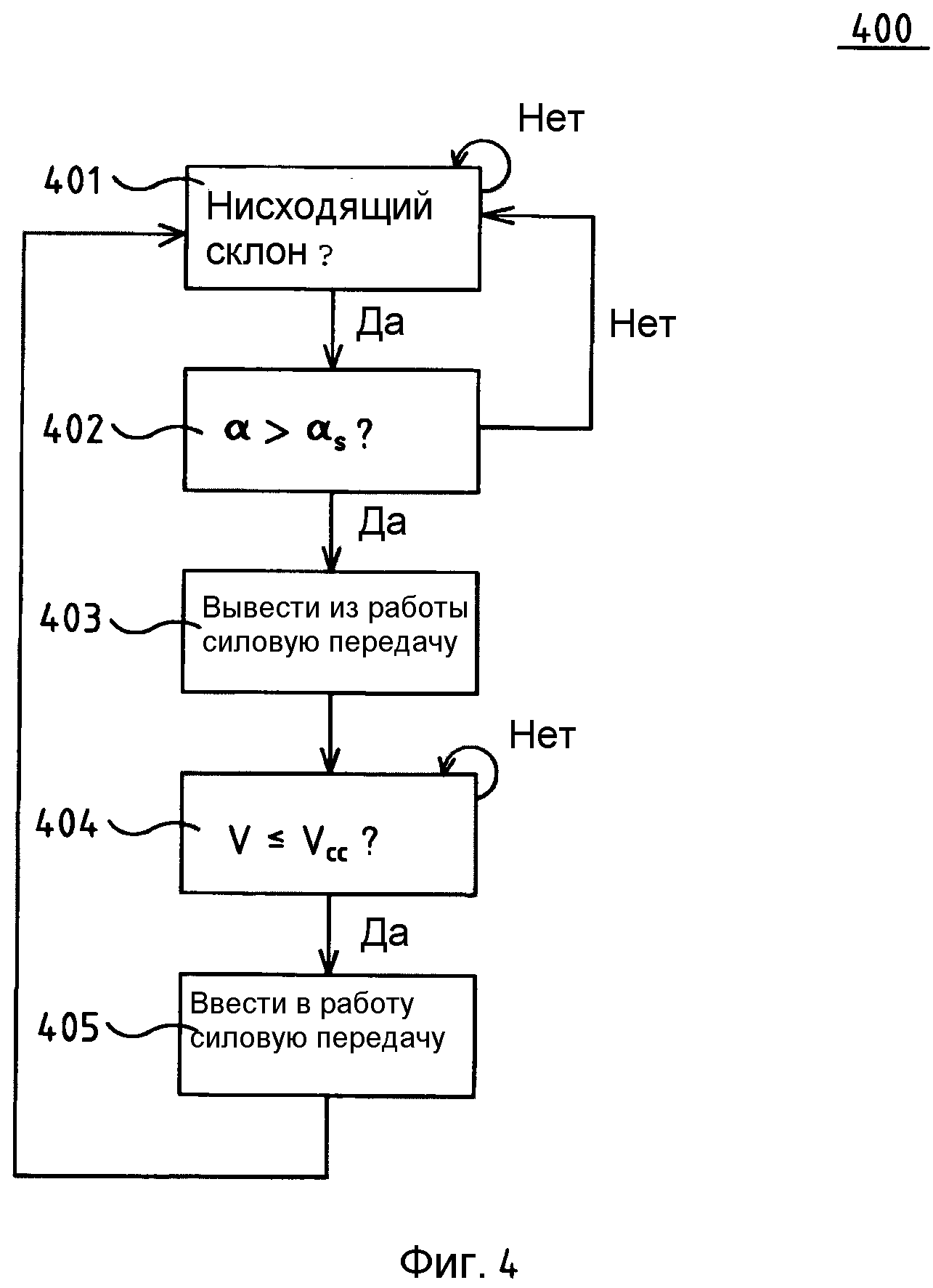
В предшествующем уровне техники только в ситуациях, когда двигатель отсоединен от ведущих колес и поэтому транспортное средство двигается накатом, были такие, что удовлетворяли условию α<αs, т.е. только на нисходящих уклонах, где ускорение может быть возможным, когда транспортное средство двигается накатом, но не при торможении двигателем. Если угол α превышает αs, применяется торможение двигателем. Понятно, что торможение двигателем также приводит к ускорению при углах α>αs и одновременно к потреблению топлива, в отличие от случая движения накатом, равному нулю. Авторы настоящего изобретения обнаружили, однако, что движение накатом также является выгодным в ситуациях, когда торможение двигателем вызывает повышение скорости транспортного средства, т.е. даже когда нисходящие уклоны соответствуют значению α>αs. Поэтому далее следует описание со ссылкой на Фиг.3A-C и способ 400 на Фиг.4. Способ 400 начинается с этапа 401, определяющего, достигло ли транспортное средство или вскоре достигнет нисходящего уклона. Это определение может быть осуществлено различными другими способами.
В первом варианте осуществления определяют, достигло ли транспортное средство нисходящего уклона на основании сил, которые воздействуют на его движение в направлении движения. Далее, движущая сила транспортного средства Fd означает общее представление результирующей сил, которые воздействуют на транспортное средство во время работы, т.е. встречного ветра, попутного ветра, сопротивления качению, силы трения и бортовых потребителей энергии, вклад мощности от двигателя и силы тяжести, ускоряющей/тормозящей транспортное средство.
Эта движущая сила Fd, как правило, может определяться как
|
где
Fair означает сопротивление воздуха транспортному средству и может быть рассчитано его системой управления посредством уравнений, которые хорошо описаны в предыдущем уровне техники, среди прочего на основании скорости транспортного средства и площади поперечного сечения в направлении движения, хотя сила сопротивления воздуха зависит от коэффициента сопротивления воздуха, которое может оказаться трудно рассчитать, но можно определить путем практических испытаний. Сопротивление воздуха также может быть оценено путем вычитания других противодействующих сил, как показано ниже, из силы, развиваемой двигателем (который является доступным посредством блока управления двигателем). Таким образом, коэффициент сопротивления воздуха также можно оценить. Fair действует против движения транспортного средства вперед, так что эта сила в уравнении (1) задается со знаком минус.
Frr обозначает силу сопротивления качению транспортного средства, которая рассчитывается подобным образом, посредством известных уравнений на основании веса транспортного средства и коэффициента сопротивления качению. Сила сопротивления качению главным образом относится к шинам/колесам транспортного средства и его массе. Эта сила действует подобным образом против поступательного движения транспортного средства, так что в уравнении (1) она задается со знаком минус.
Feng означает движущую силу, передаваемую ведущим колесам транспортного средства его двигателем. В приведенном выше уравнении эта движущая сила описывается в качестве толкающей силы, но это не подходит к случаю торможения двигателем, который вместо движущей силы Fd действует отрицательно в результате трения в двигателе. Подобно крутящему моменту, действительно подаваемому двигателем, эта сила содержит внутренние потери двигателя, а также дополнительного оборудования, которое нагружает двигатель, например, насос водяного охлаждения, компрессор кондиционера, генератор, воздушный компрессор и сервомеханизм рулевого управления. С отсоединенным двигателем (при движении накатом) Feng=0. Во время торможения двигателем Feng может быть выражена как
Feng=Fengine_fric,
где Fengine_fric будет отрицательным и, следовательно, будет действовать против движения транспортного средства.
Ffrict означает не только трение в коробке передач, которое может быть оценено системой управления транспортным средством на основании знания положения передачи и температуры коробки передач (более высокая температура обычно означает меньшее трение), но также и трение в заднем мосту/прокладках/подшипниках колес, которое может зависеть от скорости транспортного средства, а также может сохраняться в системе управления. Подобным образом эта сила действует против движения в направлении движения транспортного средства.
FG обозначает воздействие силы тяжести на движение транспортного средства, которое может выражаться как FG=mgsinα, в котором m является весом транспортного средства, g - гравитационной постоянной и α - углом наклона поверхности дорожного покрытия для транспортного средства, определенного согласно чертежам. В зависимости от угла наклона поверхности дорожного покрытия эта сила будет иметь положительное или отрицательное воздействие, т.е. на нисходящем уклоне она будет вносить позитивный вклад, который снижает сопротивление движению в направлении движения транспортного средства. Поскольку настоящее изобретение относится к движению транспортного средства на нисходящем уклоне, в настоящей заявке на выдачу патента эта сила в направлении движения транспортного средства определяется в качестве положительной, как подчеркнуто определением угла α на чертежах.
Знание скорости транспортного средства, крутящего момента двигателя, компоновки транспортного средства и другие данные окружающей среды позволяют рассчитать движущую силу транспортного средства Fd, которая затем также может использоваться для определения, будет ли ускоряться или замедляться транспортное средство. Если Fd является положительной (определяется по направлению движения), транспортное средство будет ускоряться. Таким образом, для угла наклона поверхности дорожного покрытия нет необходимости определяться в прямой форме, так как он предусмотрен в уравнении (1). Также угол αs (αF и т.д.) на Фиг.2 является постоянным, поскольку практически он будет отличаться для разных транспортных средств и даже будет разным для того же транспортного средства, например, в зависимости от преобладающего веса груза, который также охвачен приведенным выше описанием силы тяжести.
Определение α>αs может быть осуществлено другими различными способами.
Движущую силу Fd можно записать в качестве m , т.е. как вес автомобиля m, умноженный на его ускорение
, т.е. как вес автомобиля m, умноженный на его ускорение  . Когда Fd является положительным
также является положительным, так что транспортное средство ускоряется, но если Fd является отрицательным, то транспортное средство замедляется. Вес транспортного средства m, как правило, для его системы управления известен или, как правило, может быть определен. Ускорение транспортного средства также может быть определено с помощью системы управления, например, посредством акселерометра.
. Когда Fd является положительным
также является положительным, так что транспортное средство ускоряется, но если Fd является отрицательным, то транспортное средство замедляется. Вес транспортного средства m, как правило, для его системы управления известен или, как правило, может быть определен. Ускорение транспортного средства также может быть определено с помощью системы управления, например, посредством акселерометра.
Сила тяжести FG также может быть определена явным образом посредством определения текущего угла α из поверхности дорожного покрытия для транспортного средства, например, посредством датчика угла наклона, такого как гироскоп, или может, как обычно бывает, быть оценен посредством блока управления, который управляет коробкой передач транспортного средства.
Определение α>αs, как указано выше, таким образом может быть сделано путем определения, является ли ускорение
>0, т.е. Fd>0 в ситуации, когда подача топлива отключена с введенной в работу силовой передачей.
Зная значение сопротивления качению и сопротивления воздуха и силу тяжести FG, как указано выше, и зная, что Ffrict подобным образом, как описано выше, предоставляет возможность определить, является ли α>αs посредством определения, что -Fair-Frr-Ffrict+FG>0. Если результат является большим, чем нуль, это означает, что когда силовая передача введена в работу, транспортное средство будет ускоряться, т.е. α>αF.
Если результат также больше, чем Fengine_fric, когда силовая передача вводится в работу, транспортное средство также будет ускоряться, и подача топлива отключаться. Fengine_fric может, например, быть сохранено в системе управления транспортным средством, например, в виде таблицы для различных значений частоты вращения двигателя. Это определение может быть также предусмотрено для дополнительного оборудования, приводимого двигателем в действие в это же время, и в случае, когда необходимая мощность для приведения их в действие для каждого из них также может сохраняться.
Результатом является немедленное определение α>αs, поскольку оно будет иметь место, когда -Fair-Frr-Ffrict+FG>Fengine_fric.
Если ускорение и, следовательно, Fd (поскольку вес транспортного средства известен) известны, например, при измерении акселерометром, расчеты могут быть дополнительно упрощены благодаря определению Fd>Feng. Feng, например, может быть определена путем преобразования крутящего момента на выходном валу двигателя в мощность, что может быть сделано с помощью известных математических выражений, включающих вес транспортного средства и радиус ведущих колес. Если Fd>Feng, транспортное средство будет ускоряться при движении накатом, т.е. когда α>αF. Если впоследствии Fd>Feng+Fengine_fric, транспортное средство также при торможении двигателем будет ускоряться, т.е. когда α>αs.
Таким образом, можно непосредственным образом определить α>αs, как описано выше, что также может быть выполнено другими способами, известными специалисту в данной области техники. Если какая-либо из систем торможения транспортного средства вводится в работу во время этого определения, приведенные выше уравнения можно компенсировать приложенным тормозным усилием, которое может быть вычислено и/или определено посредством блока 111 управления тормозами.
Если на этапе 401 будет установлено, что дорога, по которой движется транспортное средство, изменяется в сторону понижения, способ переходит к этапу 402, чтобы определить, является ли угол наклона на спуске таким, что α>αs. Это может, например, определяться, как указано выше.
Согласно настоящему изобретению угол наклона, таким образом, не должен определяться специально, но может заменяться путем определения отношения, которое соответствует ситуации.
Если на этапе 402 условие не выполняется, способ возвращается на этап 401, но если на этапе 402 определяется, что состояние поверхности дорожного покрытия таково, что транспортное средство будет ускоряться при торможении двигателем, способ переходит к этапу 403, после чего силовая передача выводится из работы для эксплуатации транспортного средства во втором режиме М2. Переключение во второй режим М2 может иметь место по существу сразу же после того, как транспортное средство достигнет нисходящего уклона, или по существу сразу же после того, как нисходящий уклон становится таким, что угол наклона α>αs. Согласно варианту осуществления изобретения транспортное средство, как только оно достигает нисходящего уклона, всегда переключается во второй режим М2, и согласно варианту осуществления, транспортное средство всегда переключается во второй режим М2, как только транспортное средство достигает нисходящего уклона, являющегося большим, чем или равным углу αF.
Фиг.3А изображает нисходящий уклон, который начинается в местоположении А и заканчивается в местоположении В, так что определение согласно этапу 402 и открытие силовой передачи согласно этапу 403 будет иметь место в или вблизи местоположения A. Фиг.3В иллюстрирует изменения в скорости транспортного средства на участке дороги, изображенном на Фиг.3А, и на Фиг.3C - его потребление топлива на том же участке. Местоположения А, В, С взаимно соответствуют на Фиг.3A-C.
Как может быть видно на Фиг.3B, транспортное средство, пока не достигнет местоположения А, имеет скорость Vcc, которая может быть задана, например, автоматом постоянной скорости. Как может быть видно на Фиг.3C, потребление топлива транспортным средством в это время находится на уровне C2.
Когда оно достигает местоположения А, тем самым достигая нисходящего уклона с углом наклона, который является большим, чем αs, как описано выше, транспортное средство выполнено с возможностью эксплуатации как в предшествующем уровне техники, т.е. с торможением двигателем, или согласно настоящему изобретению посредством чего транспортное средство движется накатом. Эти две альтернативы проиллюстрированы на Фиг.3B и 3C, в которых непрерывные линии представляют транспортное средство, движущееся накатом, и прерывистые линии - транспортное средство, осуществляющее торможение двигателем. Поскольку угол наклона на спуске является большим, чем αs, побуждая транспортное средство ускоряться даже при торможении двигателем, его скорость будет повышаться и когда двигатель отсоединен. На Фиг.3B показано, что транспортное средство при торможении двигателем достигает скорости Vs в конце нисходящего уклона, тогда как оно достигает более высокой скорости VF при эксплуатации с отсоединенным двигателем.
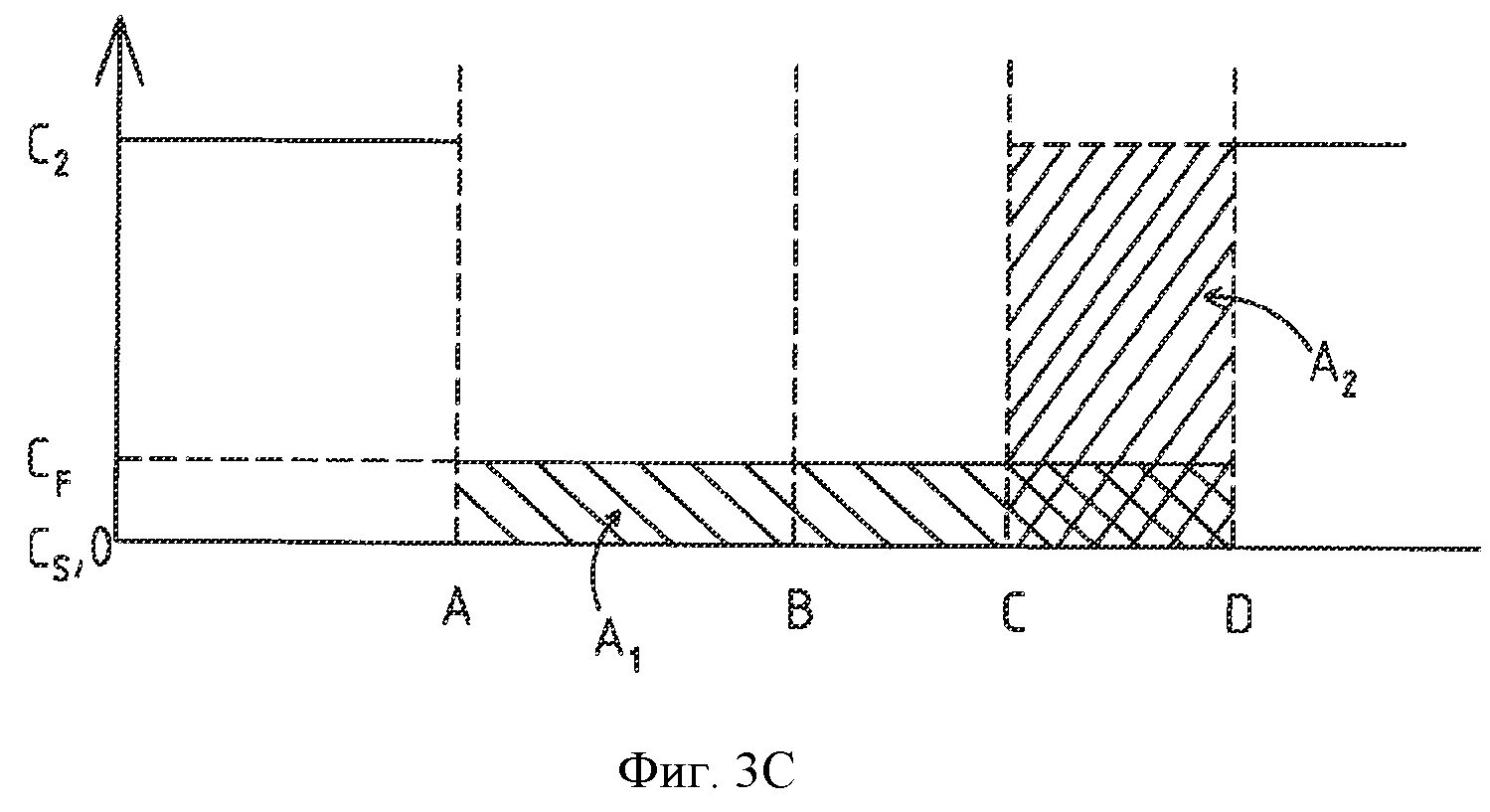
Фиг.3C иллюстрирует потребление топлива в обоих случаях, показывая, что потребление топлива во время торможения двигателем, Cs, равно нулю, поскольку топливо не подается, тогда как потребление топлива при движении накатом, CF, является потреблением, требуемым при сохранении двигателя (и приводимого им в действие дополнительного оборудования), например, компрессора кондиционера, эксплуатируемого на холостом ходу.
Когда нисходящий уклон в местоположении B заканчивается, транспортное средство прекратит ускорение и вместо этого начнет замедление. Когда транспортное средство замедляется с введенной в работу силовой передачей, его скорость будет вновь, благодаря эффекту торможения двигателем, снижаться быстрее, чем с отсоединенным двигателем. Для ясности, это иллюстрируется углами βs, βF, такими, что угол βs на Фиг.3В является меньшим, чем угол βF. Это означает, что в этом примере скорость транспортного средства понизилась снова до Vcc уже в местоположении С при торможении двигателем, тогда как при движении накатом его скорость не падает до Vcc, пока оно не достигнет местоположения D. Эта относительно высокая скорость, которой транспортное средство достигает при движении накатом, таким образом, может быть использована для продолжения движения транспортного средства при отсоединенном двигателе в прошлом местоположении В на Фиг.2 и местоположении С на Фиг.3B, пока она, например, не упадет до требуемой крейсерской скорости в местоположении D. Это представлено этапом 404 на Фиг.4. На этапе 405 силовая передача вводится в работу для транспортного средства, для того чтобы вернуться в состояние приведения его в движение двигателем, после чего способ возвращается к этапу 401 до другого нисходящего уклона.
Это, в свою очередь, означает, что потребление топлива транспортным средством при торможении двигателем снова поднимется до уровня С2 в местоположении С, тогда как это не будет иметь место в местоположении D, когда транспортное средство на спуске осуществляло движение накатом. Таким образом, результат потребления топлива транспортным средством является таким, как перед местоположением А и после местоположения D. Это означает, что движение накатом будет предпочтительнее торможения двигателем, если значение потребления топлива находится между значениями местоположений А и D, когда осуществляется движение накатом, значение является меньшим, чем при торможении двигателем. Этот участок потребления топлива представлен на Фиг.3C посредством соответствующих областей A1 между местоположениями А и D и А2 между местоположениями С и D. Должно быть отмечено, что области A1 и А2 частично перекрываются между местоположениями С и D.
До тех пор пока область А1 меньше области А2, экономичность транспортного средства по топливу при движении накатом будет больше, чем при торможении двигателем. Это также будет описано ниже более подробно. Также должно быть отмечено, что способ, по которому соответствующие области A1 и А2 изображены на Фиг.3C, является не совсем корректным в отношении оценки различий в потреблении топлива и фактически во вред движению накатом.
При движении транспортного средства накатом, как указано выше, будет достигаться более высокая скорость VF, чем скорость VS, которая достигается при торможении двигателем. Также это означает, что транспортное средство, движущееся накатом, будет иметь более высокую среднюю скорость между местоположениями А и D, чем при обычном движении с введенной в работу силовой передачей. Когда транспортное средство при движении накатом будет иметь более высокую среднюю скорость, оно также будет двигаться быстрее между местоположениями А и D, что означает, что на практике этот двигатель будет эксплуатироваться на холостом ходу в течение более короткого времени, чем указано на Фиг.3C, поскольку этот чертеж иллюстрирует потребление топлива в качестве функции от местоположения, а не от времени.
Например, время для транспортного средства, осуществляющего торможение двигателем, требуемое для движения из местоположения С до местоположения D, будет большим, чем для транспортного средства, двигающегося накатом, поэтому на практике область А2 на Фиг.3C также будет шире и, следовательно, больше, чем область А1.
Причина, по которой движение накатом более выгодно, чем торможение двигателем с точки зрения потребления топлива, ясна из уравнения (1), указанного выше. Как указано выше, уравнение (1) описывает замедляющие силы, которые действуют против ускорения транспортного средства и должны преодолеваться посредством положительной силы Feng, вырабатываемой двигателем и/или положительной силой тяжести FG на спуске, если в направлении движения должно достигаться повышение скорости. При торможении двигателем, Feng, т.е. силой, вырабатываемой двигателем, сила торможения (отрицательная) будет обусловлена наличием внутренних потерь двигателя и любого дополнительного оборудования, приводимого в действие двигателем. Сумма этих потерь равна Fengine_fric, как указано выше. При торможении двигателем, Feng, как указано выше, может быть выражена в качестве Feng=Fengine_fric, в котором Fengine_fric будет отрицательным и, следовательно, действовать против движения транспортного средства. Сила трения зависит от частоты вращения двигателя и увеличивается с увеличением частоты вращения двигателя. Это отчасти связано с увеличением потерь на работу насосов при более высокой частоте вращения двигателя, например насосов водяного охлаждения, приводимых в действие двигателем, которые должны выполнять больше работы при более высокой частоте вращения двигателя. Крутящий момент двигателя при торможении двигателем зависит от его внутренних потерь на трение, которые также зависят от частоты вращения двигателя и составляют крутящий момент, необходимый для коленчатого вала двигателя, чтобы вращаться с необходимой частотой.
Общая сумма потерянной энергии в показателях кинетической энергии во время торможения двигателем по сравнению с движением накатом, т.е. 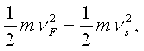 в котором m является весом транспортного средства, будет большим, чем сумма энергии, вырабатываемой топливом, чтобы поддерживать двигатель эксплуатируемым на холостом ходу, поскольку потери на трение в режиме холостого хода являются меньшими, чем при значительно более высокой скорости, при которой двигатель будут эксплуатировать при торможении двигателем. Благодаря потерям двигателя из-за частоты вращения двигателя, вся стоимость топлива, необходимого для поддержания эксплуатации двигателя, когда он отсоединен, таким образом, будет уравновешиваться посредством более высокой скорости, которую транспортное средство будет иметь в конце нисходящего уклона, т.е. в местоположении В на Фиг.3А.
в котором m является весом транспортного средства, будет большим, чем сумма энергии, вырабатываемой топливом, чтобы поддерживать двигатель эксплуатируемым на холостом ходу, поскольку потери на трение в режиме холостого хода являются меньшими, чем при значительно более высокой скорости, при которой двигатель будут эксплуатировать при торможении двигателем. Благодаря потерям двигателя из-за частоты вращения двигателя, вся стоимость топлива, необходимого для поддержания эксплуатации двигателя, когда он отсоединен, таким образом, будет уравновешиваться посредством более высокой скорости, которую транспортное средство будет иметь в конце нисходящего уклона, т.е. в местоположении В на Фиг.3А.
Согласно варианту осуществления настоящего изобретения двигатель, следовательно, также всегда отсоединен от ведущих колес, когда транспортное средство достигает конца нисходящего уклона, т.е. когда оно достигает местоположения B, в случаях, когда его преобладающая скорость превышает заданную скорость. Другими словами, даже если транспортное средство осуществляет торможение двигателем, когда оно достигает конца нисходящего уклона, двигатель отсоединен для того, чтобы позволить скорости транспортного средства снизиться в результате движения накатом, когда, как описано выше, это является предпочтительным с точки зрения потребления топлива и временной перспективы.
Настоящее изобретение, таким образом, предлагает способ эксплуатации транспортного средства на нисходящих уклонах вышеописанного вида, который приводит к более низкому потреблению топлива, чем в предыдущем уровне техники. Также изобретение предоставляет преимущество в том, что средняя скорость транспортного средства на нисходящих уклонах будет выше, что означает, что транспортное средство будет достигать места назначения быстрее или можно эксплуатировать его при крейсерской скорости несколько медленнее в течение определенного периода времени, тем самым добавив экономию времени и/или дополнительную экономию топлива в целях описанной выше экономии.
Согласно варианту осуществления настоящего изобретения транспортное средство эксплуатируется при отсоединенном двигателе не только на нисходящих уклонах, где оно будет ускоряться при торможении двигателем, но также на нисходящих уклонах с меньшими углами наклона, например, на тех, где транспортное средство замедляется при торможении двигателем и/или где оно замедляется, даже когда двигатель отсоединен. В случаях, когда транспортное средство замедляется даже при отсоединенном двигателе, движение накатом может быть прервано, если, например, его скорость падает до самой низкой требуемой скорости, например, Vcc с вычетом какого-нибудь подходящего отклонения, в случае, при котором значение отклонения может, например, зависеть от преобладающей скорости Vcc.
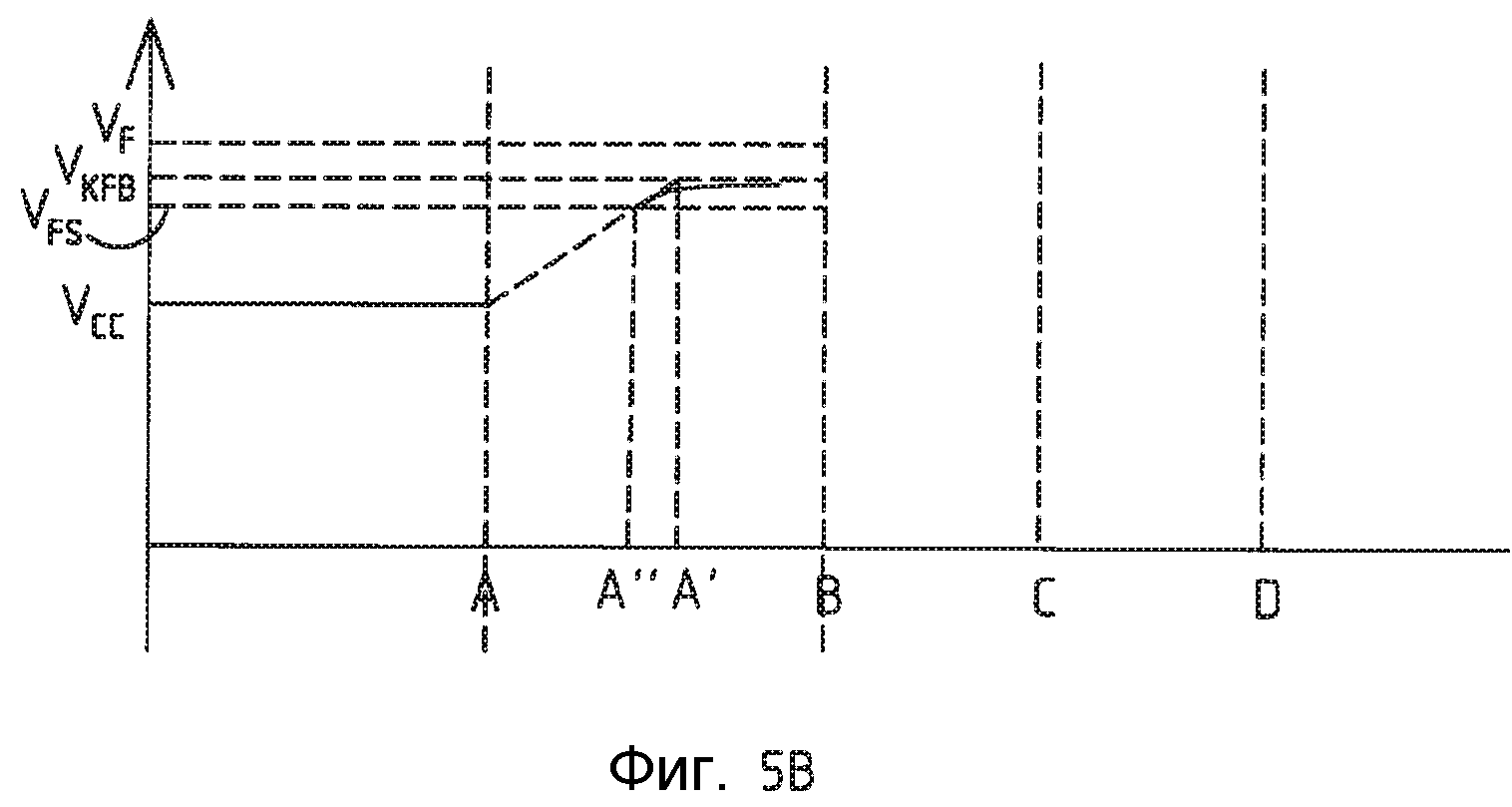
Хотя для транспортного средства это часто будет возможным, при эксплуатации в полном объеме, как описано выше, есть ситуации, когда оно могло бы при движении накатом на спуске достигать неприемлемо высокой скорости. Пример этого приведен на Фиг.5A-B. Фиг.5A изображает такой же нисходящий уклон, как на Фиг.3А. Фиг.5В иллюстрирует скорость транспортного средства. Как указано выше, скорость транспортного средства равна Vcc, когда оно достигает местоположения А и начинается нисходящий уклон. В местоположении А двигатель отсоединяется, как указано выше, от ведущих колес, так что транспортное средство начинает движение накатом вниз по уклону. Если оно движется накатом весь путь вниз, как указано в примере, оно будет, как указано выше, достигать скорости VF в конце нисходящего уклона.
Однако, транспортное средство может иметь внутренние ограничения скорости, которые не позволяют достигать скорости VF. Например, функции автомата постоянной скорости часто используют отклонение, в результате чего скорости транспортного средства предоставляется возможность изменяться около заданной скорости автомата постоянной скорости Vcc. Скорости транспортного средства может быть позволено, например, отклоняться от Vcc посредством выбираемой скорости в пределах диапазона 3-15 км/ч. Транспортное средство также может подчиняться условию, что максимальная скорость не должна превышаться, например, вследствие действующих нормативных правовых актов или потому, что производителем автомобиля была установлена максимальная скорость. Скорость также может задаваться водителем транспортного средства. Эта скорость на Фиг.5B обозначена VKFB, и если она будет достигнута, транспортное средство начнет автоматически использовать дополнительные системы торможения для того, чтобы VKFB не была превышена. В примере, изображенном на Фиг.5B, скорость VKFB является более низкой, чем скорость VF, которая в изображенном примере будет означать, что транспортное средство начинает автоматическое торможение в местоположении А' и впоследствии начинает притормаживать, чтобы сохранять скорость VKFB для оставшегося нисходящего уклона.
Обычно бывает, что риск скорости транспортного средства, превышения какой-либо конкретной максимально допустимой скорости возрастает с увеличением длины нисходящего уклона и значения ускорения. Другими словами, чем дольше и круче нисходящий уклон, тем больше вероятность того, что транспортное средство должно замедляться.
Однако такой сценарий является нежелательным, если транспортное средство достигло бы скорости VKFB даже при торможении двигателем, поскольку в этом случае конечная скорость (VKFB) будет такой же, но в отличие от движения накатом скорость достигалась бы без потребления топлива во время торможения двигателем. Вариант осуществления, изображенный на Фиг.5A-B, включает в себя, когда двигатель был отсоединен от ведущих колес, определение, ожидается ли достижение транспортным средством скорости VKFB. Это определение тоже может быть сделано сразу, т.е. посредством функции упреждения, как указано выше, или когда, например, транспортное средство достигает скорости VFS, которая выше скорости VCC, но ниже, чем VKFB.
Когда осуществляется движение накатом, ускорение транспортного средства может определяться постоянно, т.е. может быть сделано множество определений в течение времени, пока транспортное средство движется от местоположения А до местоположения А', и в этом случае определение ускорения может быть вычислено, чтобы определить, следует ли предпринимать какие-либо меры, когда будет достигнута скорость VFS. Если, например, оно находится в местоположении A", когда его ускорение является постоянным, можно ожидать, что транспортное средство в пределах определенного времени может достичь скорости VKFB. По этой причине в этом случае силовая передача может вводиться в работу, так чтобы транспортное средство эксплуатировалось с торможением двигателем, для того, чтобы приложить большее сопротивление движению вперед, следовательно, с сокращением ускорения и, следовательно, меньшим риском достижения скорости VKFB (непрерывная линия на Фиг.5B). Если в местоположении A" будет определено, что силовая передача должна быть введена в работу, другое определение может быть сделано сразу же после введения в работу, т.е. после местоположения А", чтобы увидеть, может ли силовая передача быть вновь выведена из работы для движения накатом без достижения скорости VKFB.
В соответствии с вариантом осуществления изобретения определение, должна ли силовая передача быть введена в работу, может начинаться сразу же после ее выведения из работы в местоположении А.
В этом случае возможно, например, вместо того, чтобы сделать первый выбор, на основании движущей силы Fd транспортного средства и после этого постоянно рассчитывать движущую силу Fd (и/или определять скорость транспортного средства), чтобы в случае необходимости изменять режим движения вперед транспортного средства на спуске.
Пример варианта, использующего функцию (LA) упреждения для определения, достигло ли транспортное средство или достигнет нисходящего уклона. Функция LA может, например, содержать встроенную базу данных о рельефе и, следовательно, углах наклона дороги либо для всех дорог в пределах географического охвата, например, области, страны, континента и т.д., или для участков дорог, по которым обычно движется транспортное средство. Эти данные в сочетании с местоположением транспортного средства, например, могут быть получены на основании данных о местоположении от спутниковой навигационной системы, например, данных из приемника GPS, в этом случае система управления транспортным средством может быть осведомлена о характере дороги впереди транспортного средства и, следовательно, также определяет, достигло ли или достигнет транспортное средство нисходящего уклона.
Данные о значении угла наклона дороги, например, могут также быть отправлены на транспортное средство с помощью какого-нибудь подходящего беспроводного канала связи, в случае которого передаваемые данные могут, например, быть управляемыми с текущего местоположения транспортного средства. Как и топографическая информация, характеристика дорог может содержать информацию о пределах скорости, поворотах и т.д. Эти данные также могут быть использованы при определении согласно настоящему изобретению, например, чтобы предотвратить риск превышения ограничений скорости или вхождения транспортного средства в поворот на недопустимо высокой скорости.
Это функциональное назначение LA в будущем будет реализовываться в транспортных средствах, и данные по мере необходимости из функции LA могут отправляться на блок 110 управления. Посредством функционального назначения LA определение дает преимущество предоставления возможности даже до того, как транспортное средство достигнет нисходящего уклона, чтобы определить, что оно скоро будет сделано. Функция LA также может быть использована для расчета самой высокой скорости, которой транспортное средство достигнет на основании знания его текущей скорости, угла наклона на спуске впереди и других данных о транспортном средстве. В случае если функциональное назначение LA является встроенным, движение накатом может начинаться еще до начала нисходящего уклона для того, чтобы снизить скорость транспортного средства, прежде чем на спуске она вновь возрастет. Транспортное средство может также переключаться во второй режим M2 в пределах первого времени t1, когда определяется, что скорость транспортного средства будет повышаться при работе в первом режиме М1. Этот способ может быть использован, например, чтобы гарантировать, что скорость транспортного средства на спуске не будет превышать VKFB, как указано выше. Настоящее изобретение может также сочетаться со способом и системой, описанными в параллельной заявке на выдачу патента Швеции "Method and system pertaining to vehicles II" ("Способ и система, относящиеся к транспортным средствам II"), с той же датой подачи, изобретателем и заявителем, как в настоящей заявке, посредством чего транспортному средству предоставляется возможность двигаться накатом даже до того, как оно достигнет нисходящего уклона.
Приведенное выше описание также описывает движение накатом согласно способу, в соответствии с которым двигатель, при движении накатом, эксплуатируется на холостом ходу, имея результатом потребление топлива. Согласно варианту осуществления, когда осуществляется движение накатом, двигатель отключается.
Отключение двигателя приводит к дальнейшему снижению потребления топлива по сравнению с ситуациями, когда двигатель просто отсоединен от ведущих валов транспортного средства, и ситуациями, когда транспортное средство осуществляет торможение двигателем. Двигатель может быть отключен во всех или одном или более промежутках времени, когда транспортное средство движется накатом.
Согласно варианту осуществления двигатель отключается только в тех случаях, когда определено, что отключение является выгодным. Это предоставляет возможность определять, например, может ли двигатель быть отключен в течение первого периода времени до его вынуждения быть перезапущенным. Это определение может быть сделано, например, как указано выше, с помощью функции упреждения. Промежуток времени может, например, быть основан на экономии топлива, достигаемой за счет отключения двигателя, и промежуток времени может быть, например, промежутком, который, по меньшей мере, приводит к снижению потребления топлива, соответствующего тому, который необходим для перезапуска двигателя стартером. Параллельная заявка на выдачу патента Швеции "Method and system pertaining to vehicles III" ("Способ и система, относящиеся к транспортным средствам III"), с той же датой подачи, изобретателем и заявителем в качестве настоящей заявки, описывает способ и систему, посредством которой двигатель транспортного средства отключается во время движения накатом, когда отключение возможно для по меньшей мере первого периода времени. Такой способ здесь также может быть использован.
Настоящее изобретение не ограничено вышеописанными вариантами осуществления изобретения и включает все варианты осуществления в пределах объема прилагаемой формулы изобретения. Например, настоящее изобретение, как проиллюстрировано выше для нисходящего уклона с постоянным углом наклона α. Как указано ранее, изобретение применимо ко всем типам нисходящих уклонов, т.е. даже для различных углов наклона.
Существенным моментом изобретения является то, что транспортному средству предоставляется возможность движения накатом даже в ситуациях, когда при торможении двигателем ускорение также могло бы иметь место.
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства

