Результат интеллектуальной деятельности: НАВИГАЦИОННЫЙ КОМПЛЕКС ПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области морской геодезии, а именно к определению уклонения отвесной линии (УОЛ) в океане, и может быть использовано для определения УОЛ на подвижном объекте вдоль траектории его движения в целях совершенствования навигационно-гидрографического обеспечения посредством навигационного комплекса подвижного объекта.
Известен гравиметрический способ определения УОЛ в океане, включающий измерение на объекте вторых производных гравитационного потенциала по ортогональным осям гравитационными градиентометрами, по результатам измерений которых вычисляют значения составляющих УОЛ в меридиане и в первом вертикале (О влиянии геодезической неопределенности на точность выработки навигационных параметров инерциальной навигационной системой // Записки по гидрографии. №196, 1976, с. 78-83 [1]. Методы определения отвеса в океане // Записки по гидрографии. №196, 1976, с. 57-63 [2]).
Данный гравиметрический способ определения УОЛ в океане имеет недостаточно высокую точность, так как при его использовании имеют место систематические и медленно меняющиеся погрешности измерений вторых производных гравитационного потенциала, которые невозможно определить, а следовательно, и учесть на объекте.
Погрешность определения УОЛ (δu) этим способом вычисляется по формуле
 ,
,
где δw - систематическая погрешность определения второй производной гравитационного потенциала, достигающая у современных гравитационных градиентометров 1 этвеш;
S - пройденное объектом расстояние от исходной до текущей точки,
и достигает от 2,1угл.с до 6,3угл.с на расстояниях от 1 000 км до 3000 км, соответственно, в то время как допустимая предельная погрешность с вероятностью Р=0,0997 определения УОЛ в океане не должна превышать 1-2угл.с [2], т.е. известный способ не позволяет определить УОЛ в океане с требуемой точностью.
Известен также гравиметрический способ определения УОЛ в океане, включающий измерение силы тяжести гравиметром на объекте вдоль траектории его движения, вычисление по результатам измерений продольной составляющей УОЛ [2]. Однако данный гравиметрический способ определения УОЛ в океане имеет недостаточно высокую точность, так как при его использовании погрешность определения продольной составляющей УОЛ достигает 11угл.с. При этом данный способ не обеспечивает определение составляющих УОЛ в меридиане и в первом вертикале на объекте вдоль траектории его движения, а следовательно, не позволяет определять информацию об УОЛ, необходимую для обеспечения использования бортовых навигационных комплексов [1].
Известен также навигационный комплекс подвижного объекта, который содержит приемоиндикатор спутниковой навигационной системы, измерители скорости и курса, включая трехстепенный магнитный датчик направления, установленный в связанной системе координат подвижного объекта, датчики углов крена, тангажа, датчики углов атаки и скольжения, датчики линейных ускорений и угловых скоростей, установленные в связанной системе координат подвижного объекта, и бортовой вычислитель, выполненный с возможностью совместной обработки всех датчиков и систем. В состав указанного комплекса дополнительно введена косвенная стабилизированная платформа, снабженная тремя кардановыми рамками, на которых установлены три моментных электродвигателя с сервоприводом, два трехкомпонентных акселерометра с механизмом их перемещения относительно друг друга, измеритель линейной скорости перемещения трехкомпонентных акселерометров, функционально связанных с бортовым вычислителем. Предложенное изобретение направлено на повышение точности определения текущих навигационных параметров оснащенного им подвижного объекта (патент RU №2279039, 27.06.2006 [3] - прототип).
Однако данный навигационный комплекс не обеспечивает определение составляющих УОЛ в меридиане и в первом вертикале, а следовательно, имеет погрешность в выработке геодезических координат.
Задачей предлагаемого технического решения является расширение технических возможностей навигационного комплекса подвижного объекта путем определения составляющих УОЛ в меридиане и первом вертикале на объекте в океане.
Поставленная задача решается за счет того, что в навигационный комплекс подвижного объекта, состоящий из приемоиндикатора спутниковой навигационной системы, измерителей скорости и курса, включая трехстепенный магнитный датчик направления, установленный в связанной системе координат подвижного объекта, датчиков углов крена, тангажа (дифферента), датчиков углов атаки и скольжения, датчиков линейных ускорений и угловых скоростей, установленных в связанной системе координат подвижного объекта, и бортового вычислителя, выполненного с возможностью совместной обработки всех датчиков и систем, косвенной стабилизированной платформы, снабженной тремя кардановыми рамками, на которой установлены три моментных электродвигателя с сервоприводом, два трехкомпонентных акселерометра с механизмом их перемещения относительно друг друга, измеритель линейной скорости перемещения трехкомпонентных акселерометров, функционально связанных с бортовым вычислителем, в отличие от прототипа [3], дополнительно введена косвенная стабилизированная в горизонте платформа, на которой установлены три моментных электродвигателя с сервоприводом, четыре акселерометра с вертикальной осью чувствительности и с механизмом их перемещения в горизонте первой пары акселерометров навстречу друг другу по заданному направлению и второй пары акселерометров навстречу друг другу по направлению, перпендикулярному заданному направлению перемещения первой пары акселерометров, измеритель линейной скорости перемещения акселерометров относительно подвижного объекта, регистратор моментов встречи двух акселерометров на траверзе первой и второй пары, при этом все устройства функционально связаны через введенный блок управления с бортовым вычислителем, в котором вычисляют искомые значения составляющих уклонения отвесной линии в меридиане и в первом вертикале.
Сущность изобретения поясняется чертежами (фиг. 1, 2, 3).
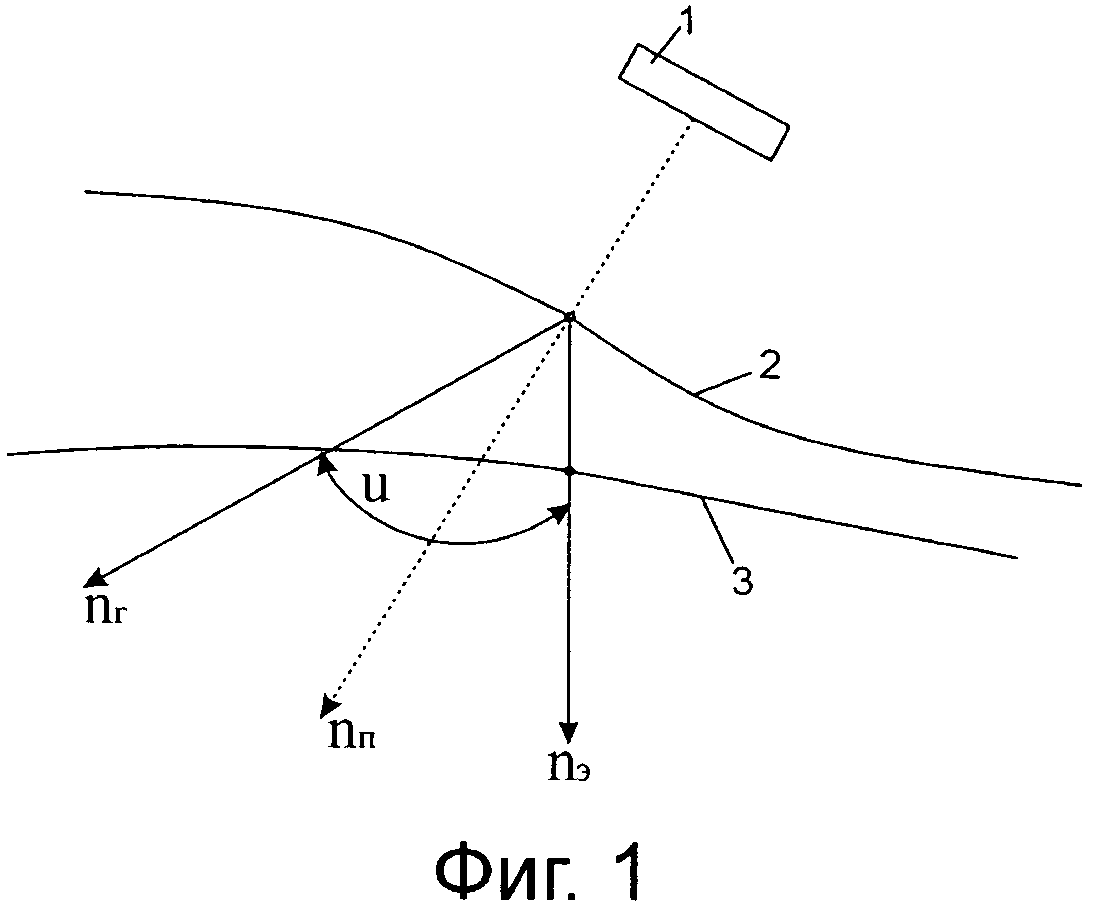
Фиг. 1. Схема определения уклонения отвесной линии. Гиростабилизированная платформа 1, геоид 2, эллипсоид 3, nэ - нормаль к земному эллипсоиду, nг - нормаль к геоиду, u - угол между нормалями.
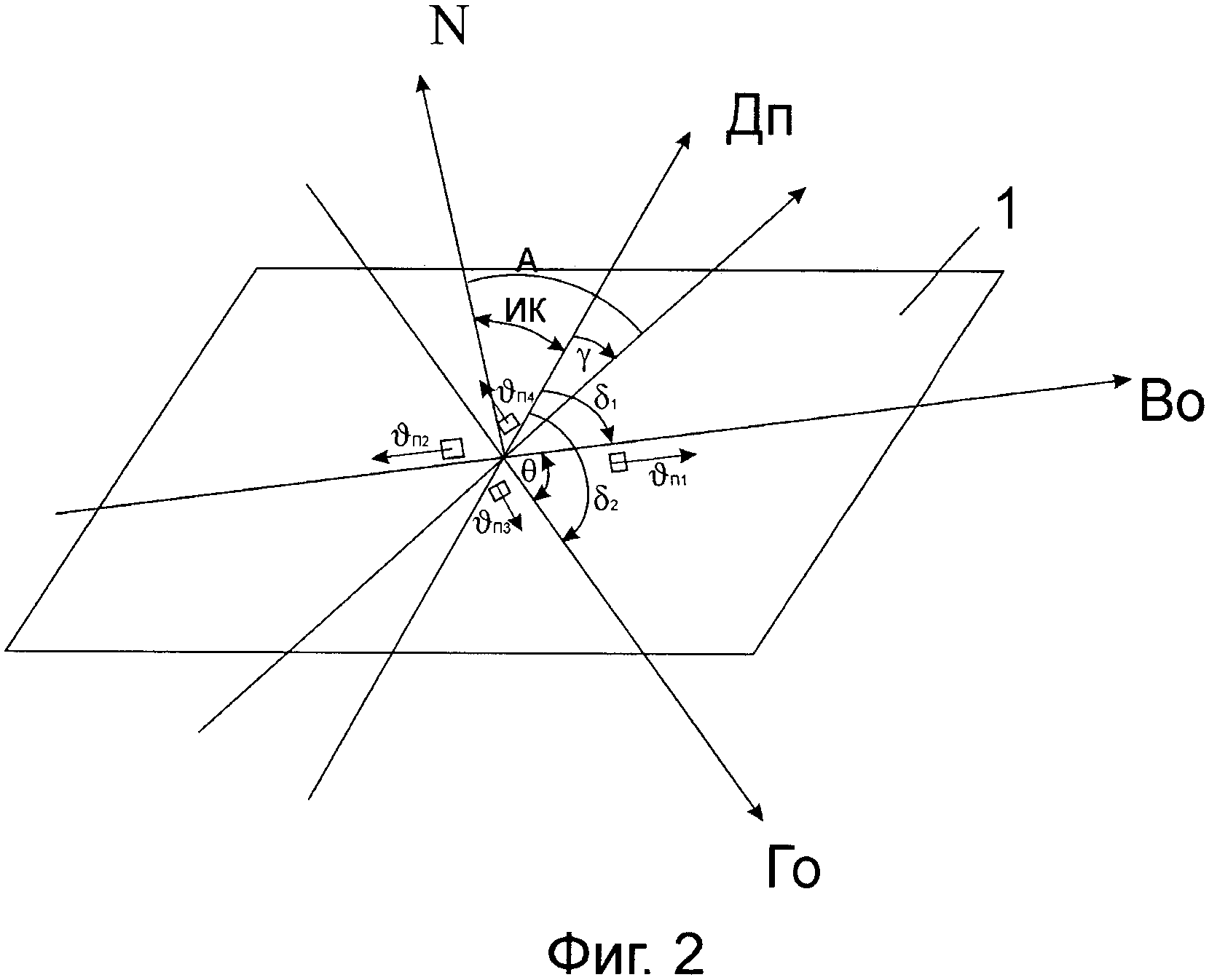
Фиг. 2. Схема для определения УОЛ. Гиростабилизированная платформа 1, ДП - диаметральная плоскость объекта, ИК - истинный курс, N - направление на север, А - азимут вектора абсолютной скорости, ВО и ГО - два взаимно перпендикулярных направления, по которым перемещаются две пары акселерометров, Vп1 - скорость движения первого акселерометра, Vп2 - скорость движения второго акселерометра, Vп3 - скорость движения третьего акселерометра, Vп4 - скорость движения четвертого акселерометра, δ1 - угол между ДП и направлением ВО, δ2 - угол между ДП и направлением ГО, γ - угол дрейфа, θ - угол между направлениями ВО и ГО.
Фиг. 3. Блок-схема навигационного комплекса. Навигационный комплекс состоит из бортового вычислителя 4, магнитного датчика 5 направления движения, блока 6 датчиков углов крена, блока 7 датчиков тангажа, блока 8 датчиков углов атаки, блока 9 датчиков скольжения, блока 10 управления, приемоиндикатора 11 спутниковой навигационной системы, блока 12 датчиков линейных ускорений, блока 13 датчиков угловых ускорений, пульта управления 14, косвенной стабилизированной платформы 15, моментных электродвигателей 16, 17, 18 с сервоприводом, трехкомпонентных акселерометров 19, 20, механизма 21 перемещения акселерометров 19, 21 относительно друг друга, измерителя 22 линейной скорости перемещения акселерометров 19, 20, косвенной стабилизированной платформы 23, моментных электродвигателей 24, 25, 26 с сервоприводом, акселерометров 27, 28, 29, 30 с вертикальной осью чувствительности, механизма 31 перемещения акселерометров 27, 28, 29, 30, измерителя 32 линейной скорости перемещения акселерометров 27, 28, 29, 30, регистратора 33 моментов встречи двух акселерометров на траверзе первой и второй пары, измерителя 34 скорости объекта, гирокомпаса 35.
Косвенная стабилизированная платформа 23 выполнена с тремя кардановыми рамками, на которых установлены три моментных электродвигателя 24, 25, 26 с сервоприводом, выполненных в виде редуктора.
Механизм 31 перемещения акселерометров 27, 28, 29, 30 предназначен для перемещения первой пары акселерометров 27, 28 по параллельным направлениям навстречу друг другу по заданному направлению и второй пары акселерометров 29, 30 по параллельным направлениям навстречу друг другу по направлению, перпендикулярному заданному направлению перемещения первой пары акселерометров 27, 28 и состоит из двигателя, редуктора, червячных передач.
Механизм 31 перемещения акселерометров 27, 28, 29, 30 может быть также выполнен в виде закрепленных на стабилизированной в горизонте платформе двух маятниковых штативов, к которым подвешены по два маятника. К каждому маятнику прикреплен акселерометр с вертикальной осью чувствительности. Для обеспечения незатухающих колебаний маятники должны колебаться в вакуумном колпаке или под воздействием внешней силы, например наведенного магнитного поля, посредством электромагнита.
Механизм 31 перемещения акселерометров 27, 28, 29, 30 может быть также выполнен в виде эскалатора, на ленте которого закреплены акселерометры
Измеритель 32 линейной скорости перемещения акселерометров 27, 28, 29, 30 относительно подвижного объекта может быть выполнен в виде интерферометра или тахометра типа АДТ-20-50.
Регистратор 33 моментов встречи двух акселерометров на траверзе первой и второй пары состоит из фотоприемника и направленного источника света.
Определение составляющих УОЛ в меридиане (ξ) и в первом вертикале (η), заключается в измерении акселерометрами 27, 28, 29, 30 ускорений  ,
,  ,
,  ,
,  соответственно в моменты встречи их на траверзе двух акселерометров первой (27, 28) и второй (29, 30) пары.
соответственно в моменты встречи их на траверзе двух акселерометров первой (27, 28) и второй (29, 30) пары.
При этом определяется разность отсчетов  и
и  .
.
В бортовом вычислителе 4 путем вычислений определяют составляющие УОЛ в меридиане (ξ) и в первом вертикале (η):


где
β - угол между вектором абсолютной скорости движущегося объекта и плоскостью горизонта;

γ - угол дрейфа;
δ1 - угол между ДП и направлением ВО;
δ2 - угол между ДП и направлением ГО;
∑1 - сумма скоростей акселерометров 27 и 28;
∑2 - сумма скоростей акселерометров 29 и 30;
VH - абсолютная скорость объекта;
Rг - радиус кривизны геоида;
h1,2 - расстояния по вертикальной оси акселерометров, движущихся по направлениям ВО и ГО, до поверхности геоида;
ИК - истинный курс объекта.
Предлагаемое техническое решение обеспечивает расширение технических возможностей навигационного комплекса подвижного объекта путем определения составляющих УОЛ в меридиане и первом вертикале на объекте в океане и уменьшение погрешности в выработке геодезических координат навигационными комплексами подвижных объектов.
Источники информации
1. О влиянии геодезической неопределенности на точность выработки навигационных параметров инерциальной навигационной системой // Записки по гидрографии. №196, 1976, с. 78-83.
2. Методы определения отвеса в океане // Записки по гидрографии. №196, 1976, с. 57-63.
3. Патент RU №2279039, 27.06.2006.
Навигационный комплекс подвижного объекта, состоящий из приемоиндикатора спутниковой навигационной системы, измерителей скорости и курса, включая трехстепенный магнитный датчик направления, установленный в связанной системе координат подвижного объекта, датчиков углов крена, тангажа (дифферента), датчиков углов атаки и скольжения, датчиков линейных ускорений и угловых скоростей, установленных в связанной системе координат подвижного объекта, и бортового вычислителя, выполненного с возможностью совместной обработки всех датчиков и систем, косвенной стабилизированной платформы, снабженной тремя кардановыми рамками, на которых установлены три моментных электродвигателя с сервоприводом, два трехкомпонентных акселерометра с механизмом их перемещения относительно друг друга, измеритель линейной скорости перемещения трехкомпонентных акселерометров, функционально связанных с бортовым вычислителем, отличающийся тем, что дополнительно введена косвенная стабилизированная в горизонте платформа, на которой установлены три моментных электродвигателя с сервоприводом, четыре акселерометра с вертикальной осью чувствительности и с механизмом их перемещения в горизонте первой пары акселерометров навстречу друг другу по заданному направлению и второй пары акселерометров навстречу друг другу по направлению, перпендикулярному заданному направлению перемещения первой пары акселерометров, измеритель линейной скорости перемещения акселерометров относительно подвижного объекта, регистратор моментов встречи двух акселерометров на траверзе первой и второй пары, при этом все устройства функционально связаны через введенный блок управления с бортовым вычислителем, в котором вычисляют искомые значения составляющих уклонения отвесной линии в меридиане и в первом вертикале.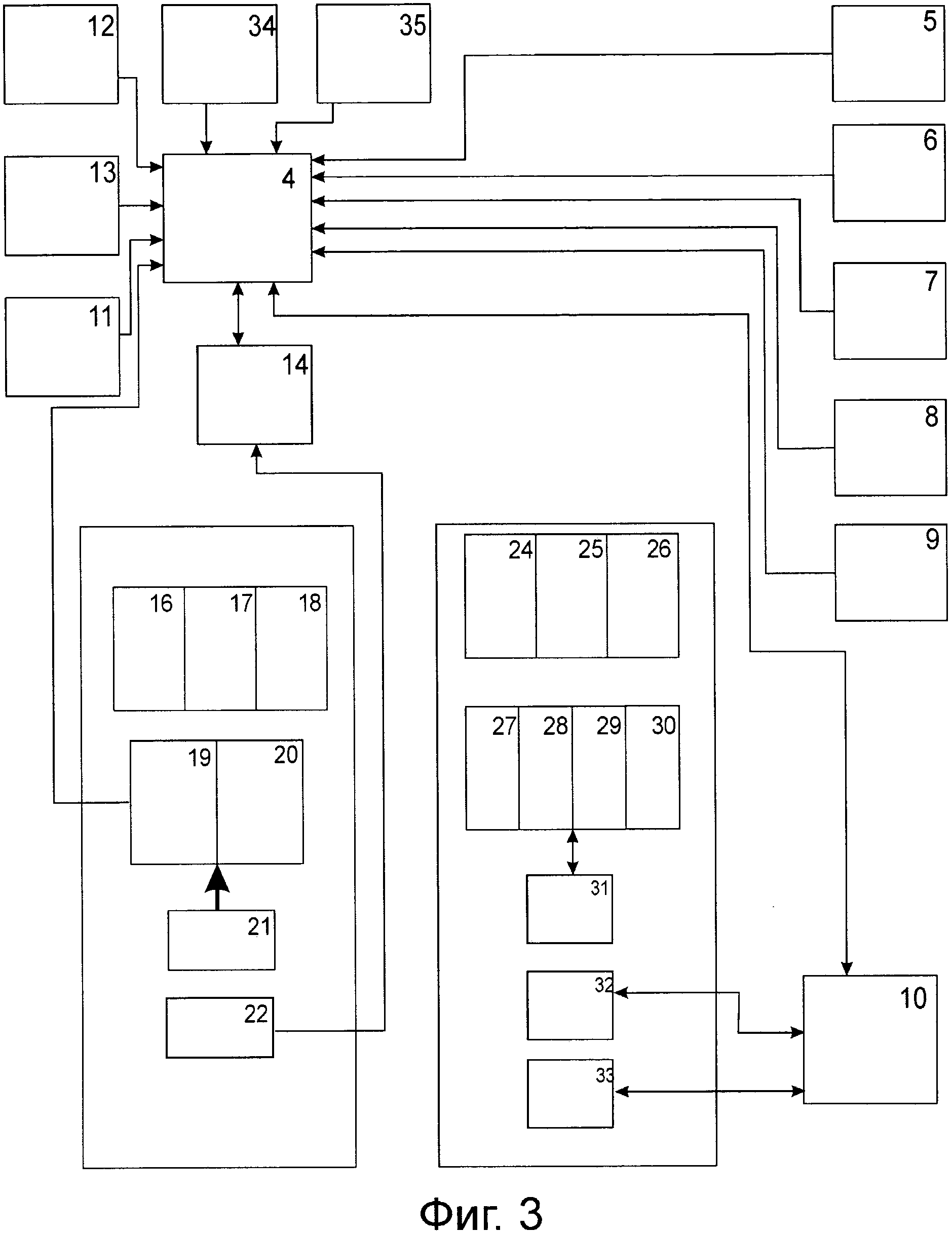
Способ обустройства морских терминалов по добыче подводных залежей углеводородов
Устройство для предотвращения образования льда на водной поверхности
Способ картографирования ледниковой геоморфологии
Способ определения наивыгоднейшего оптимального пути судна
Система измерения гидрологических параметров на больших глубинах
Способ повышения эффективности стрельбы из вооружения самоходных объектов
Морская автономная донная станция для сейсморазведки и сейсмологического мониторинга
Автономная донная широкополосная сейсмостанция
Способ съемки рельефа дна акватории и эхолот для его осуществления
Способ спасения на воде и устройство для спасения на воде
Способ обустройства морских терминалов по добыче подводных залежей углеводородов
Устройство для предотвращения образования льда на водной поверхности
Способ картографирования ледниковой геоморфологии
Способ определения наивыгоднейшего оптимального пути судна
Система измерения гидрологических параметров на больших глубинах
Способ повышения эффективности стрельбы из вооружения самоходных объектов
Морская автономная донная станция для сейсморазведки и сейсмологического мониторинга
Автономная донная широкополосная сейсмостанция
Способ съемки рельефа дна акватории и эхолот для его осуществления
Способ спасения на воде и устройство для спасения на воде

