Результат интеллектуальной деятельности: ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ
Вид РИД
Изобретение
Изобретение относится к области навигационного приборостроения летательных и космических аппаратов.
В настоящее время при решении задач управления малогабаритными подвижными объектами (объектами управления - ОУ) все большее применение находят бескарданные инерциальные системы ориентации и навигации. Это в первую очередь связано с прогрессом в разработке инерциальных чувствительных элементов, электроники, существенным снижением их массогабаритных характеристик и стоимости.
Создание таких бескарданных инерциальных систем ориентации и навигации сопряжено с рядом проблем. В первую очередь можно выделить проблему достижения необходимого уровня точности инерциальными чувствительными элементами, применяемыми в таких системах, в частности инерциальными микромеханическими датчиками (ММД). На современном этапе развития ММД автономное функционирование бескарданных инерциальных систем в течение длительного времени при сохранении ими требуемого уровня точности не представляется возможным. Требуемый уровень точности достигается путем интеграции информации бескарданных инерциальных измерительных модулей (БИ-ИМ) с приемной аппаратурой (ПА) спутниковых навигационных систем (СНС), то есть, путем построения интегрированных систем ориентации и навигации (ИСОН) на базе БИИМ, информационно и конструктивно интегрированных с ПА СНС [1, 2].
Для обеспечения также и высокой помехоустойчивости таких систем, их построение осуществляется по так называемой сильносвязанной схеме [3].
В рассмотренных патентах [4, 5, 6, 7, 8] не обеспечивается требуемый уровень точности интегрированной системы в определении параметров ориентации для объектов с быстрым вращением вокруг продольной оси.
Способы определения параметров ориентации объекта, основанные на использовании в ПА СНС фазовых измерений с разнесенных на объекте антенн, приведены в описании первой из отечественных мультиантенной ПА СНС МРК-11, разработки Красноярского государственного технического университета и НИИ радиотехники, а также в [9, 10, 11].
В известных схемах построения ИСОН, например, описанных в работах [12, 13] используется мультиантенная ПА СНС с фазовыми измерениями, обеспечивающая с определенной дискретностью автономную выработку параметров ориентации объекта. Эта задача, как известно, требует решения проблемы неоднозначности фазовых измерений.
Известны различные способы решения данной проблемы [14]. Все они требуют одновременного наблюдения и обработки фазовых измерений от группировки навигационных спутников (HCi), достаточно сложного программного обеспечения.
Совместная обработка данных БИИМ и ПА СНС в рассматриваемых схемах построения ИСОН производится на уровне параметров ориентации.
Однако в ряде случаев проблема сравнительно низкого уровня точности современных инерциальных ММД (погрешности их масштабных коэффициентов находятся на уровне 1%) становится настолько острой, что без принятия специальных мер не удается достичь требуемого уровня точности решения задачи ориентации объекта в рамках построения общеизвестных схем ИСОН. В частности, для объектов с быстрым вращением вокруг продольной оси (1…20 Гц) остро встает проблема, связанная с погрешностью масштабного коэффициента гироскопа, стоящего по оси вращения. Для таких ОУ погрешность выработки ИСОН угла поворота вокруг оси вращения может быть недопустимо большой. Следствием этого может стать потеря управления объектом.
Существуют способы, решающие эту проблему. Основные из них [15]:
- изоляция БИИМ от вращения корпуса объекта вокруг продольной оси;
- применение дополнительного одноосного гиростабилизатора по продольной оси;
- использование неинерциальных измерений (от магнитометров, фазовых измерений от ПА СНС и др.);
- использование принудительной прецессии объекта и оценка ее параметров по показаниям специально установленных акселерометров.
В рассмотренном на эту тему патенте [16] не в полной мере решается задача определения параметров ориентации для объектов с быстрым вращением вокруг продольной оси. Их реализация связана либо с необходимостью придания объекту требуемого движения, либо с необходимостью использования дополнительного набора независимых измерителей, предлагаемые алгоритмы обработки показаний которых не всегда обеспечивают требуемый уровень точности интегрированной системы.
Также известна [17] схема построения системы ориентации и навигации для объектов с быстрым вращением вокруг продольной оси, которая в своем составе может использовать также и БИИМ. Данная система обеспечивает решение задачи ориентации ОУ по углу и угловой скорости крена с привлечением фазовых измерений СНС на разнесенные по окружности в поперечной плоскости объекта четыре приемные антенны. При этом используется короткая антенная база менее длины волны, что исключает необходимость решения проблемы оценки неоднозначности фазовых измерений. Данная схема построения интегрированной системы выбрана в качестве прототипа.
Перечень чертежей
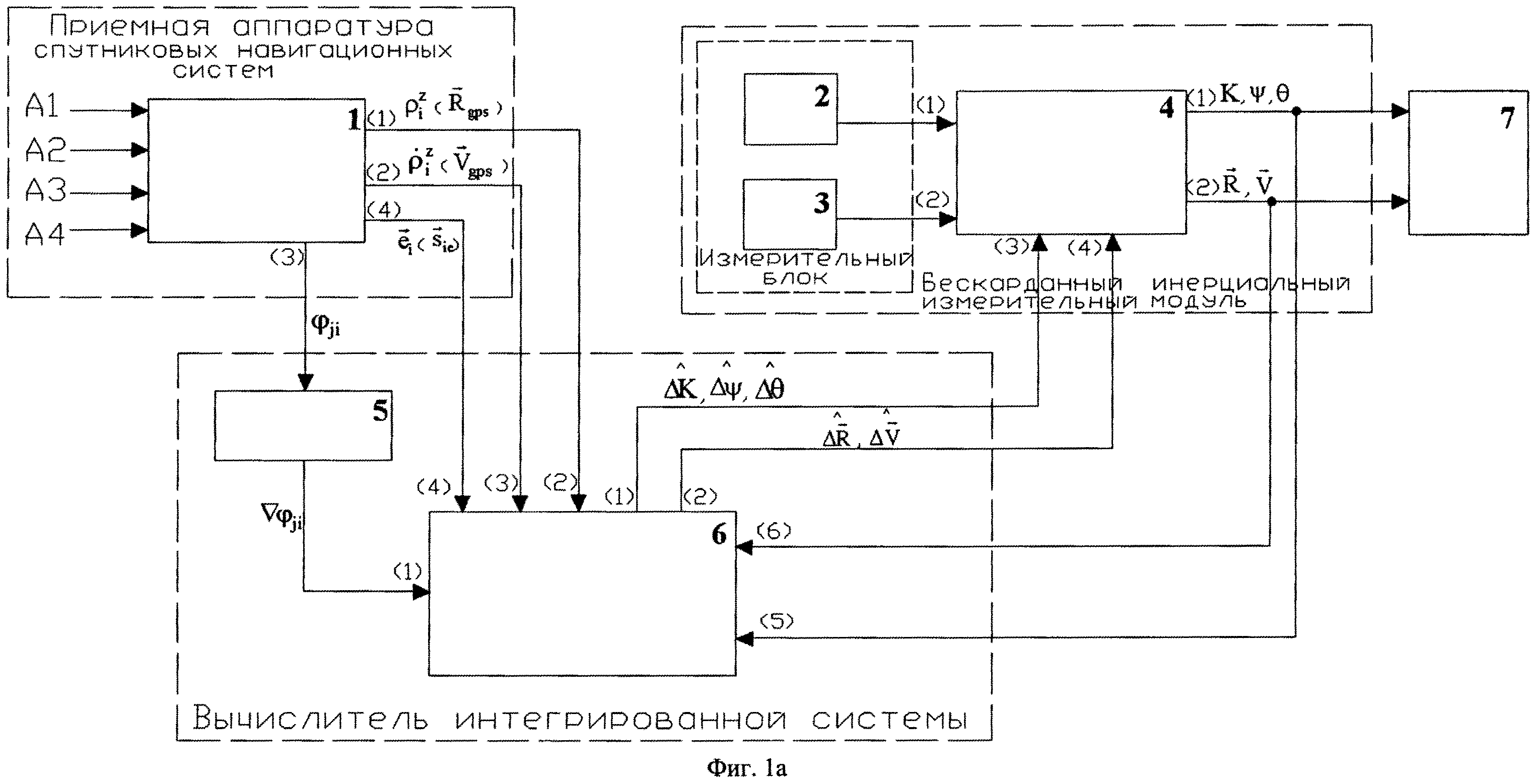
На фиг. 1а приведена блок-схема интегрированной системы, принимаемой в качестве прототипа, в состав которой кроме приемной аппаратуры СНС, согласно описанию патента, может быть включен для повышения точности малогабаритный бескарданный инерциальный измерительный модуль.
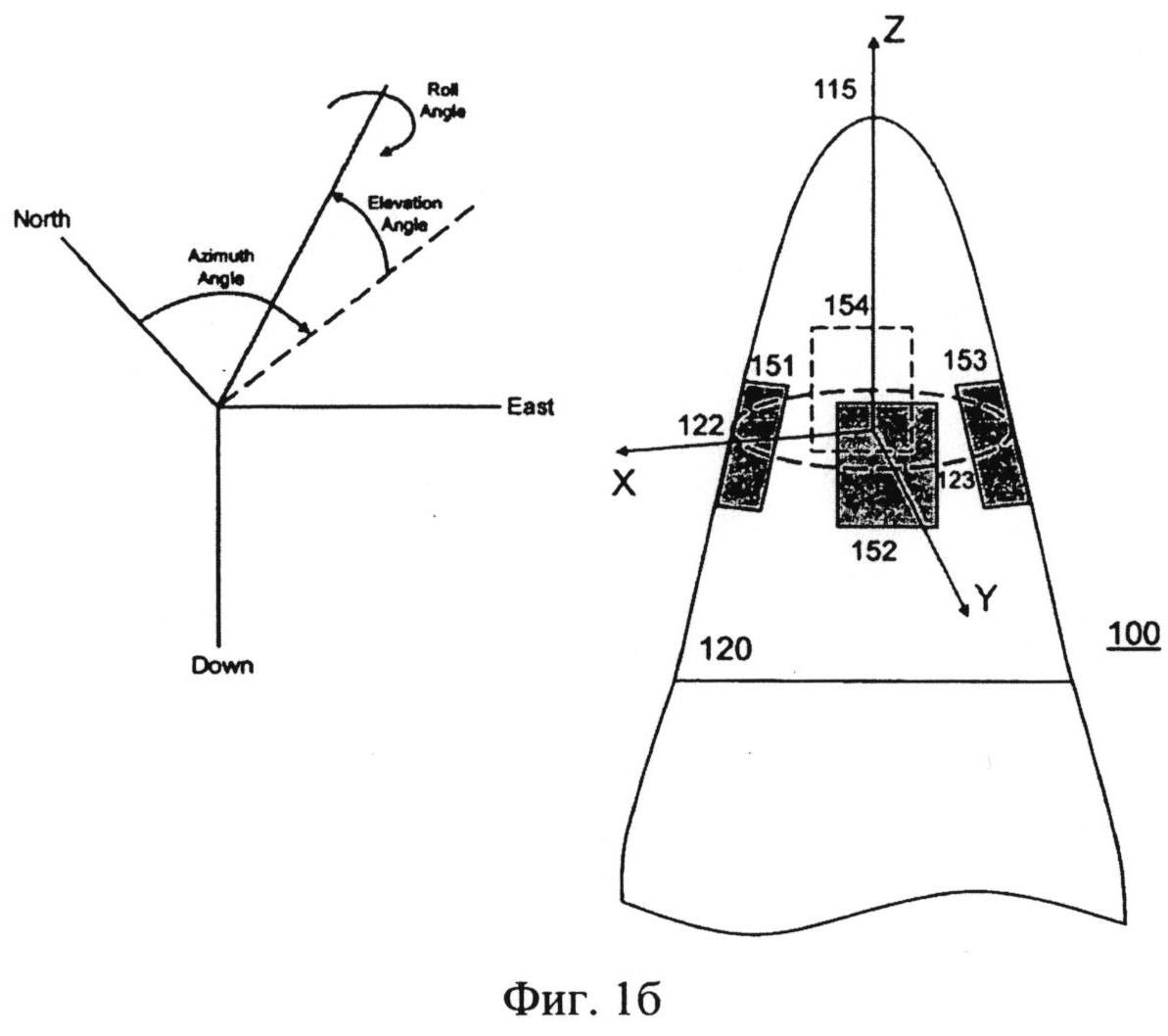
На фиг. 1б приведена схема расположения на объекте приемных антенн СНС, описанная в прототипе [17].
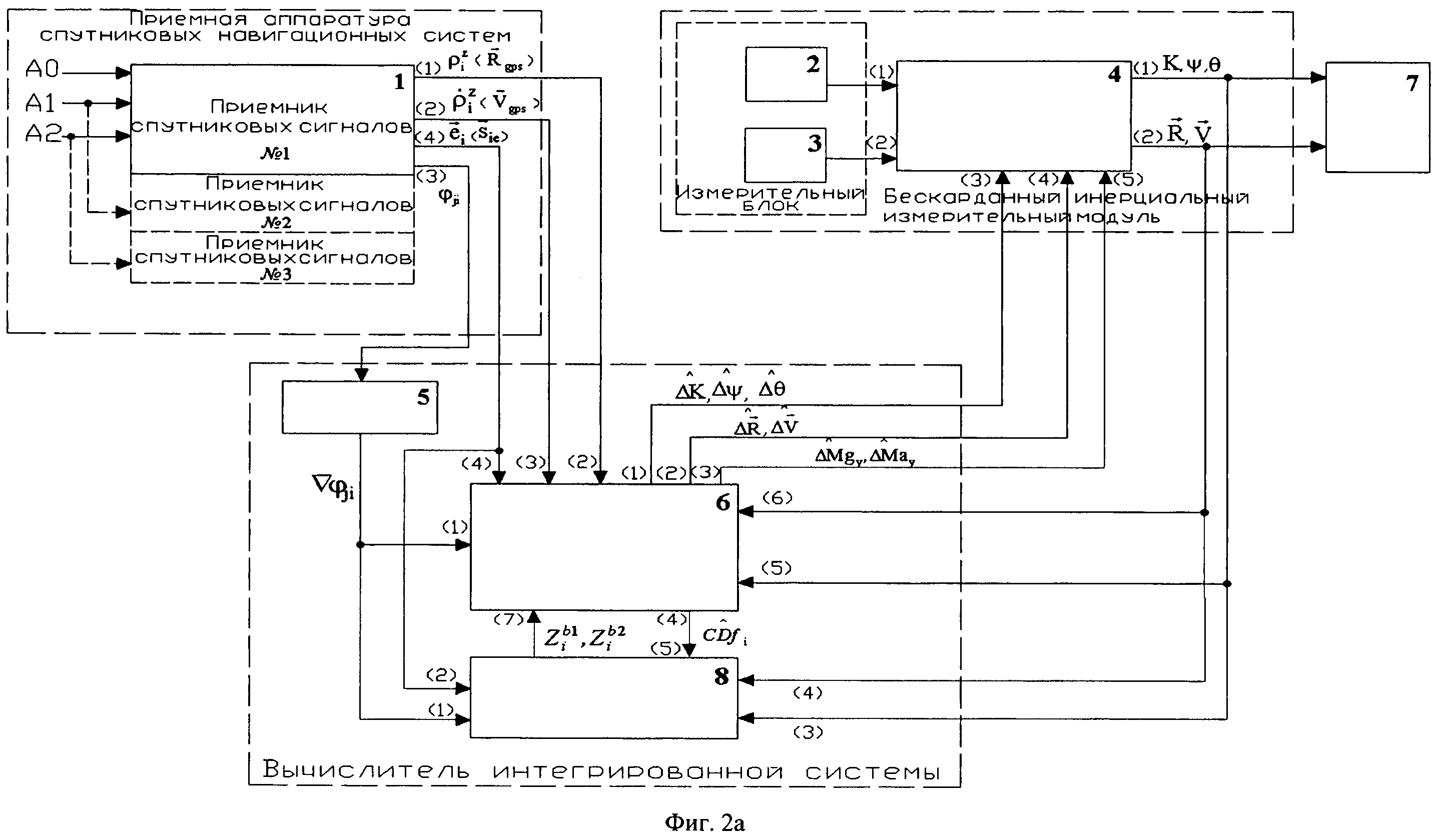
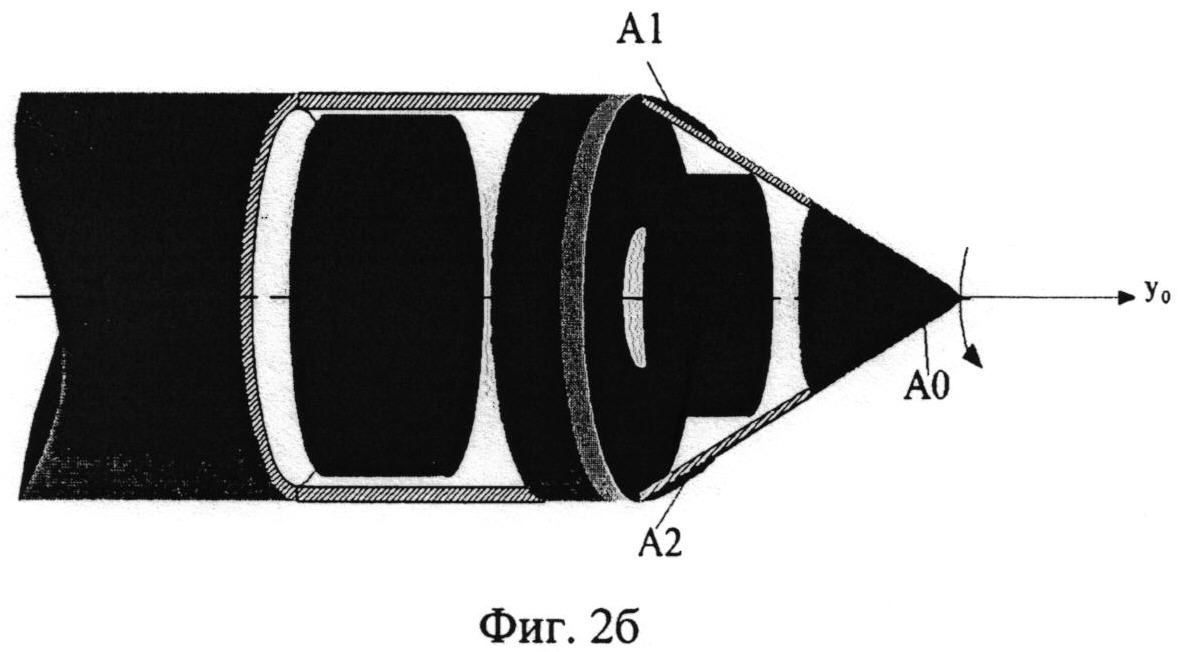
На фиг. 2а и 2б изображены блок-схема предлагаемой ИСОН и схема расположения на объекте приемных антенн А0, A1, А2.
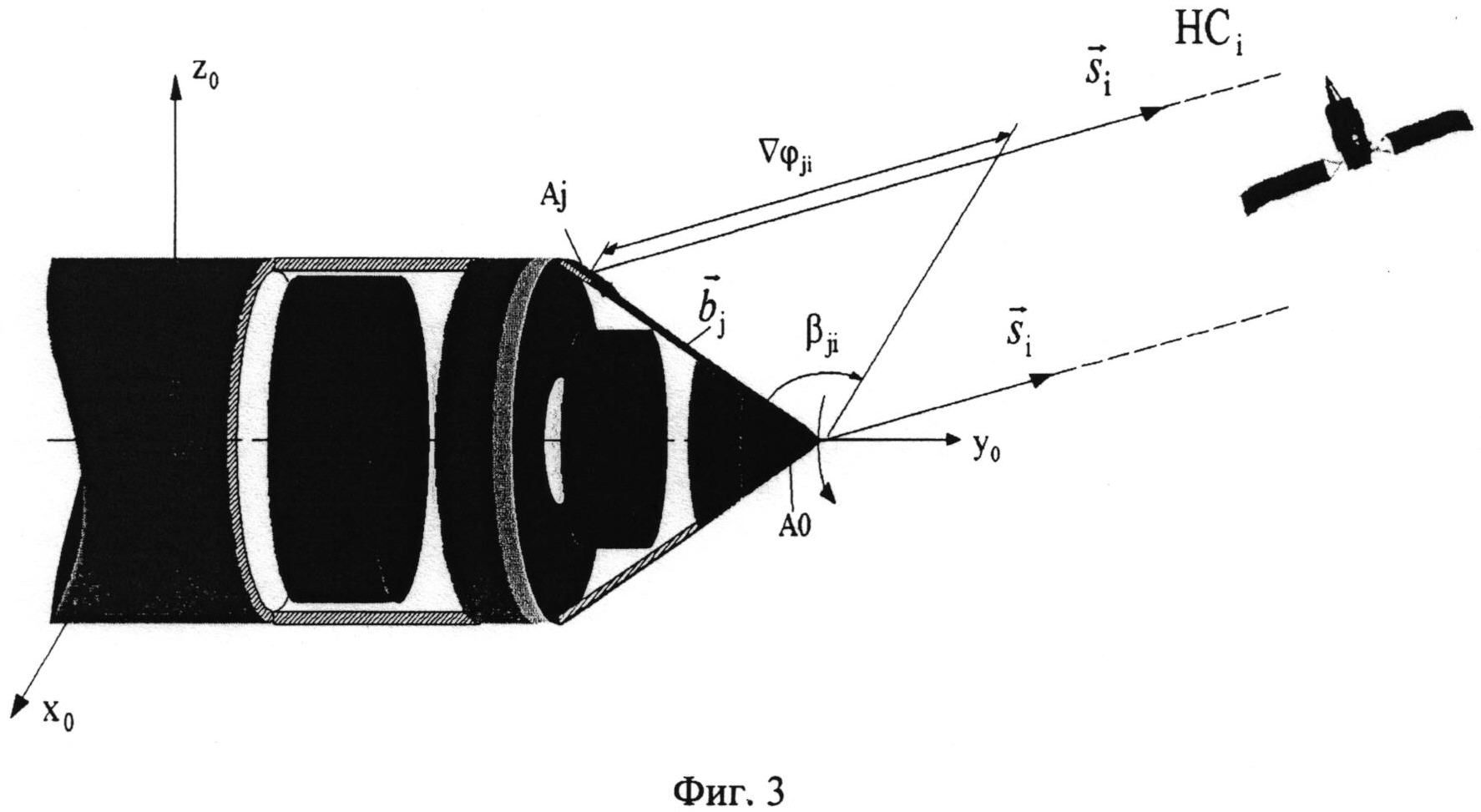
Фиг. 3 иллюстрирует интерферометрический принцип формирования фазовых измерений в ПА СНС на примере одной антенной базы.
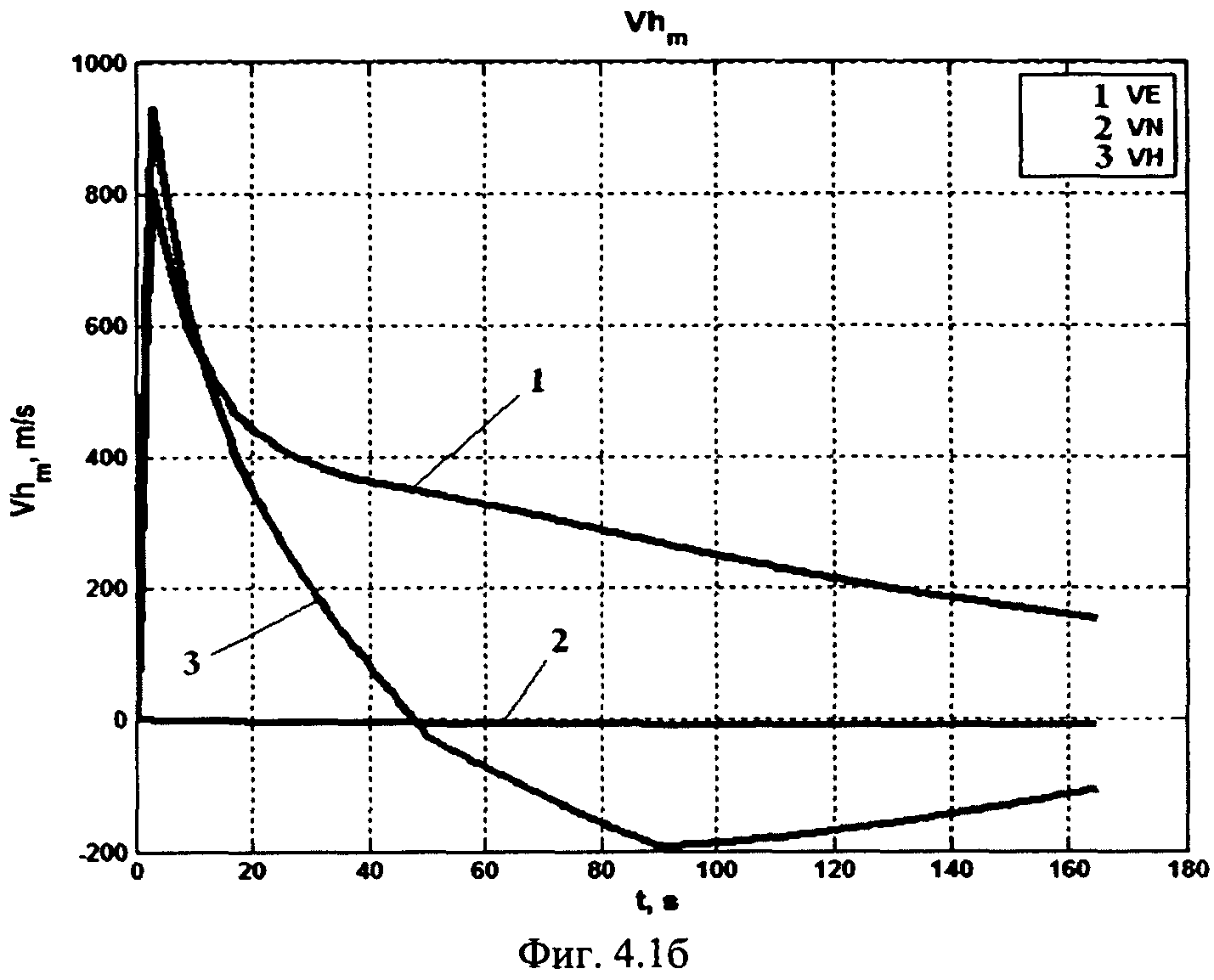
Фиг. 4.1а, 4.1б характеризуют параметры траектории движения авиационного объекта в атмосфере Земли.
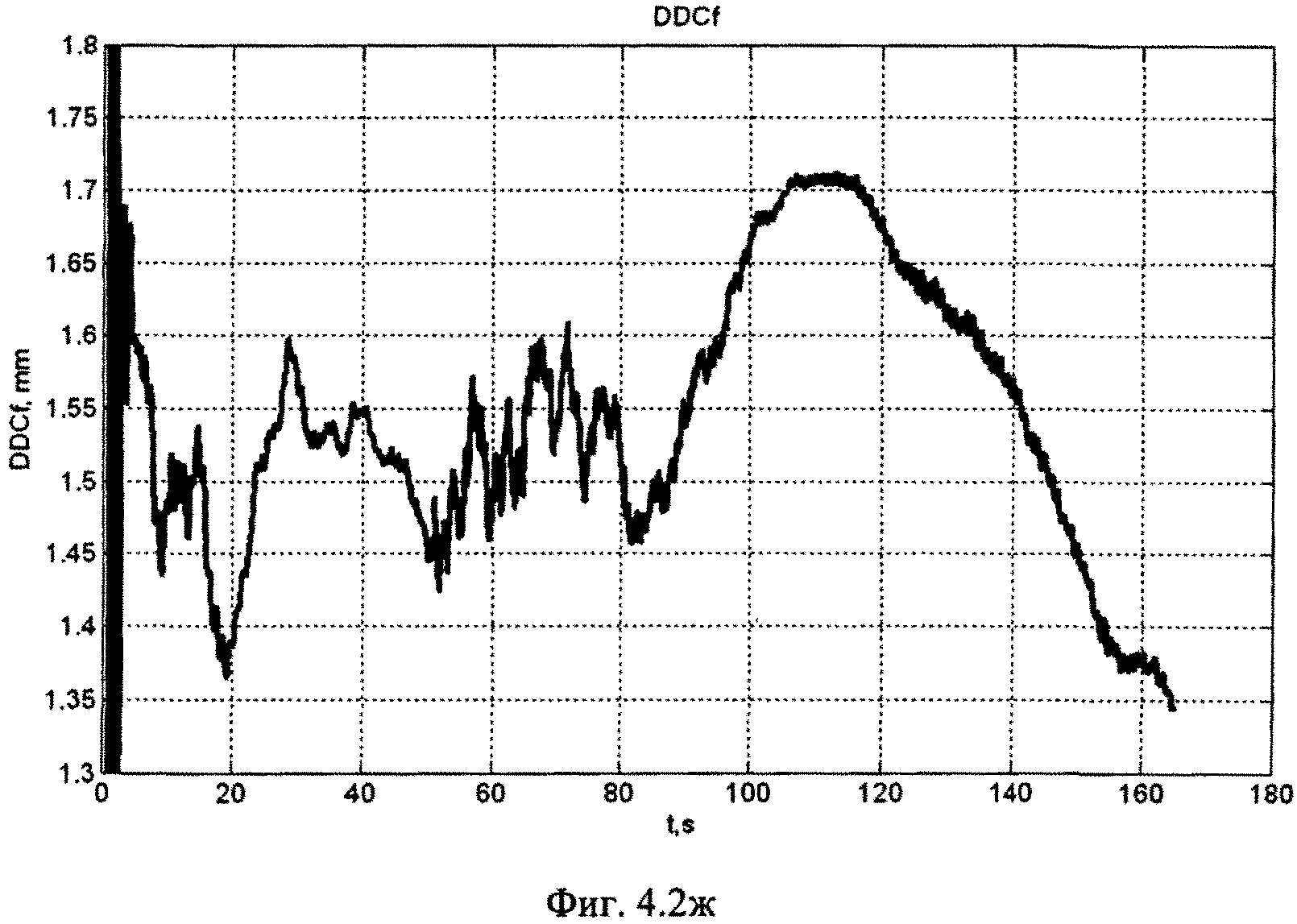
Фиг. 4.2а…4.2ж иллюстрируют результаты моделирования в пакете MATLAB (Simulink) алгоритмов работы предлагаемой ИСОН, включающей БИИМ с измерительным блоком на «грубых» микромеханических гироскопах (ММГ) и акселерометрах (ММА) и три приемника СНС с тремя антеннами, размещенными на объекте согласно фиг. 2б. При этом отстояния антенн A1, А2 относительно опорной антенны А0 составляли, по оси Y - 0.3 м, по оси X - ±0.075 м.
На фиг. 1а приняты следующие обозначения:
1 - приемная аппаратура спутниковых навигационных систем, включающая один спутниковый приемник и четыре (или более) антенны - A1, А2, A3, А4, разнесенные на соответствующих антенных базах, на выход которой поступают значения:
-  ,
,  - псевдодальность и псевдорадиальная скорость до i-го навигационного спутника HCi (первичные навигационные параметры) или
- псевдодальность и псевдорадиальная скорость до i-го навигационного спутника HCi (первичные навигационные параметры) или  ,
,  - вектора координат и линейной скорости объекта соответственно, приведенные к месту расположения опорной антенны (навигационное решение);
- вектора координат и линейной скорости объекта соответственно, приведенные к месту расположения опорной антенны (навигационное решение);
- φji - фазы сигнала несущей от HCi, принятого на j-й антенне;
-  ,
,  - координаты или направляющие косинусы HCi в осях гринвичского навигационного трехгранника (эфемеридная информация);
- координаты или направляющие косинусы HCi в осях гринвичского навигационного трехгранника (эфемеридная информация);
2 - блок акселерометров, входящий в состав измерительного блока (ИБ) бескарданного инерциального измерительного модуля;
3 - блок гироскопов ИБ БИИМ;
4 - навигационный вычислитель БИИМ, вырабатывающий по данным микромеханических датчиков (блоков 2 и 3 акселерометров и гироскопов соответственно), значения следующих выходных параметров:
- K, ψ, θ - значения курса, тангажа и крена;
-  ,
,  - координаты и вектор линейной скорости объекта в месте расположения ИБ БИИМ;
- координаты и вектор линейной скорости объекта в месте расположения ИБ БИИМ;
5 - блок выработки первых разностей фаз ∇φji, (БВПРФ) сигналов HCi на несущей частоте, принятых на опорную и j-ю антенны, входящий в вычислитель интегрированной системы;
6 - блок комплексной обработки информации (БКОИ), входящий в вычислитель интегрированной системы, с фильтром типа фильтра Калмана, на выход которого поступают значения:
-  ,
,  ,
,  - оценки погрешностей ориентации по углам курса, тангажа и крена;
- оценки погрешностей ориентации по углам курса, тангажа и крена;
-  ,
,  - оценки погрешностей БИИМ по координатам и вектору линейной скорости объекта;
- оценки погрешностей БИИМ по координатам и вектору линейной скорости объекта;
7 - блок приема потребителем выходных параметров системы.
На фигуре 1б приняты следующие обозначения:
100 - снаряд;
115 - ось вращения;
120 - оконечное тело;
122 - окружность, по которой расположены антенны;
123 - точка на оси вращения, относительно которой расположены антенны;
151…154 - четыре приемных антенны СНС;
X, Y, Z - оси системы координат, связанной с оконечным телом.
На фигуре 2а приняты следующие обозначения, отличные от обозначений фиг. 1а:
- в блоке 1: ПА СНС, включающая один спутниковый приемник (приемник №1) с тремя входами или три приемника (приемник №1, приемники №2 и 3, обозначены пунктиром), каждый из которых имеет один вход для подключения антенны, и три антенны: А0 - опорная, A1, А2 - разнесенные на соответствующих антенных базах;
- в блоке 8: блок формирования разности расчетных и измеренных значений первых или вторых разностей фазовых измерений (БФРФИ), дополнительно входящий в вычислитель интегрированной системы, для двух антенных баз между опорной А0 приемной антенной СНС и отстоящими от нее A1, А2 антеннами -  ,
,  ;
;
- в блоке 6 дополнительно введены выходы, с которых поступают значения:
-  ,
,  - оценки погрешностей масштабных коэффициентов гироскопа и акселерометра, установленных по продольной оси объекта;
- оценки погрешностей масштабных коэффициентов гироскопа и акселерометра, установленных по продольной оси объекта;
-  - оценки остаточной «скачкообразной» неоднозначности фазовых измерений.
- оценки остаточной «скачкообразной» неоднозначности фазовых измерений.
На фиг. 2б приняты следующие обозначения:
А0, A1, А2 - опорная антенна и разнесенные на соответствующих антенных базах антенны;
y0 - продольная ось объекта.
На фиг. 3 приняты следующие обозначения:
Aj - j-я антенна ПА СНС;
А0 - опорная антенна ПА СНС;
Ox0y0z0 - связанная с объектом система координат;
 - трехмерный вектор, характеризующий отстояние в системе координат Ox0y0z0 j-ой антенны Aj относительно опорной А0;
- трехмерный вектор, характеризующий отстояние в системе координат Ox0y0z0 j-ой антенны Aj относительно опорной А0;
 - направление орта на навигационный спутник (HCi) в точке приема;
- направление орта на навигационный спутник (HCi) в точке приема;
βji - угол между j-й антенной базой и направлением на HCi.
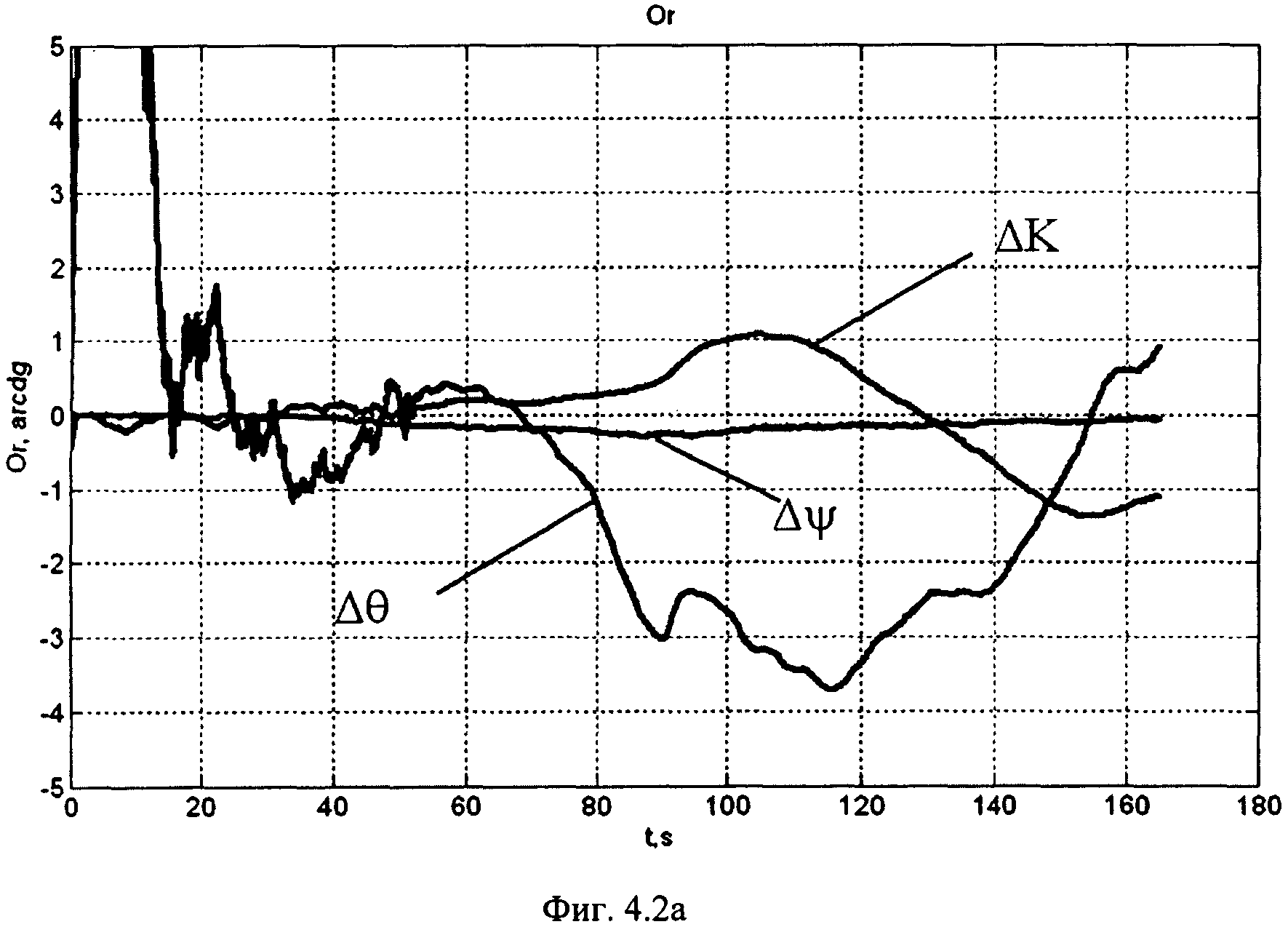
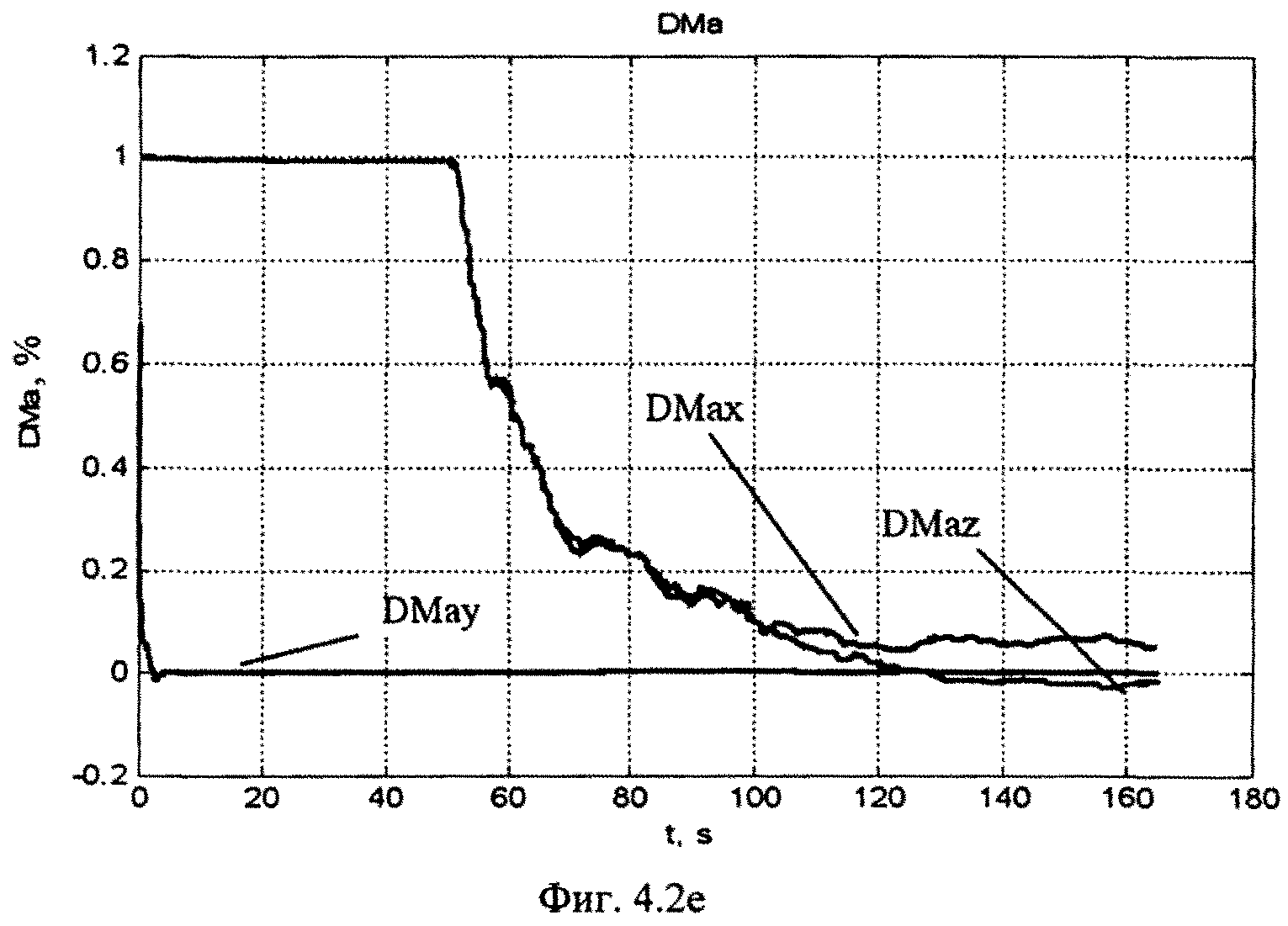
На фиг. 4.1(а,б), 4.2(а,ж) приняты следующие обозначения:
nE, nN, nH - составляющие кажущегося ускорения (в географических осях (ENH), соответственно, [м/с2];
- nhm - заданное кажущееся ускорение в географических осях, характеризующее движение объекта по траектории, [м/с2];
- t - время, [с];
VE, VN, VH - составляющие скорости движения объекта в географических осях (ENH), соответственно, [м/с];
- Vhm - заданная линейная скорость в географических осях, характеризующая движение объекта по траектории, [м/с];
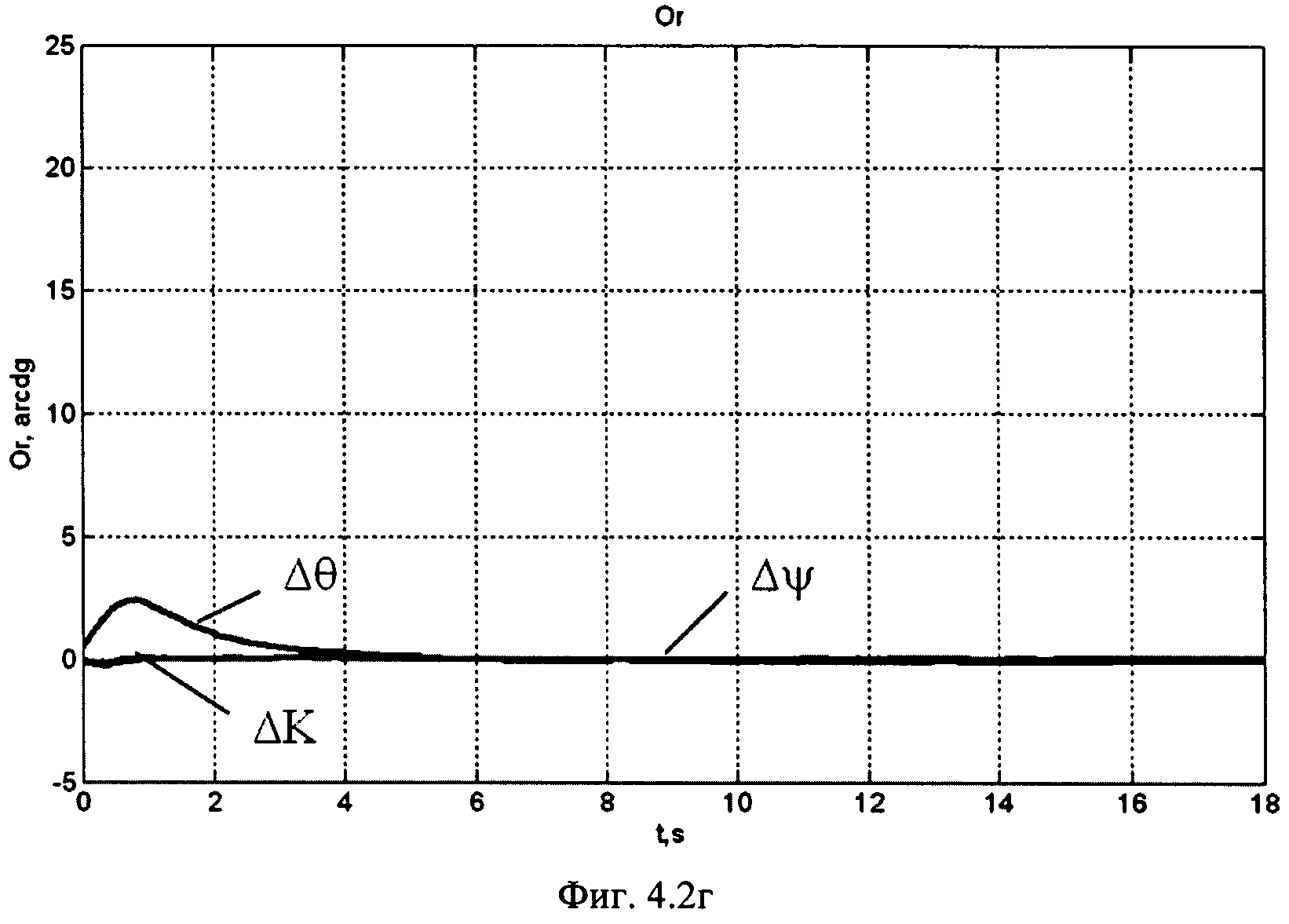
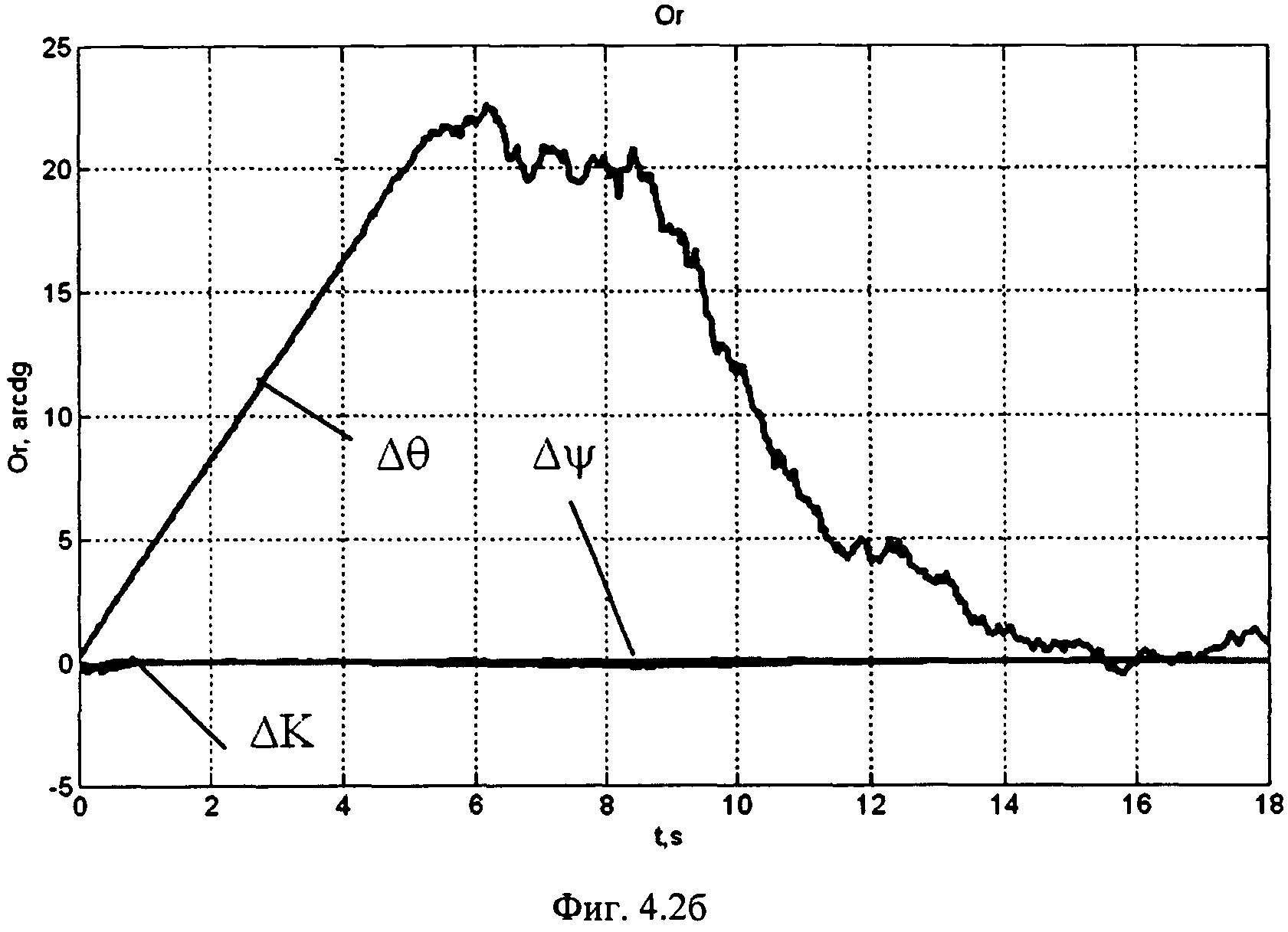
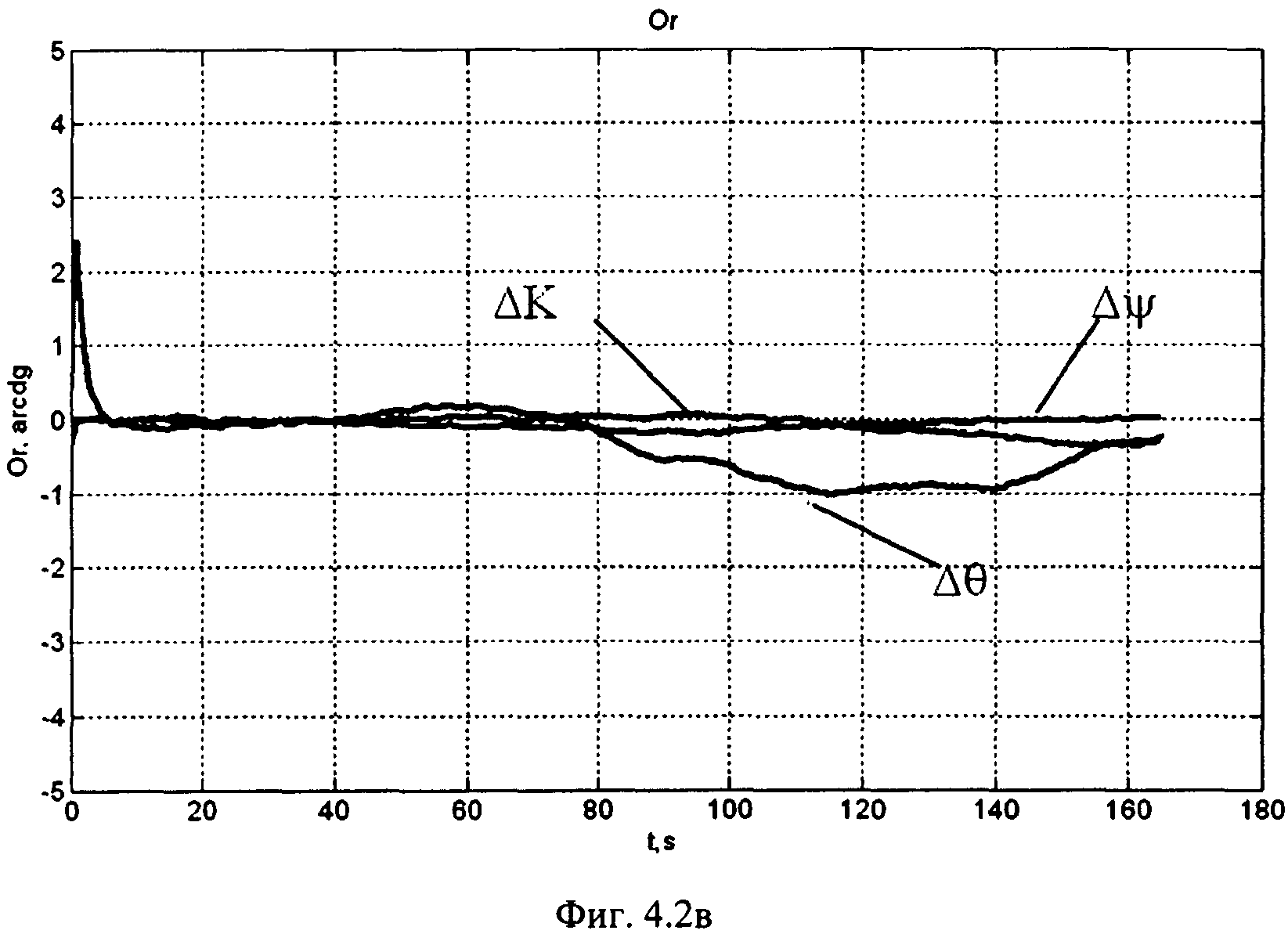
-, Δψ, Δθ - погрешности ориентации по углам тангажа и крена (град);
- ΔK - погрешность ориентации по курсу (град);
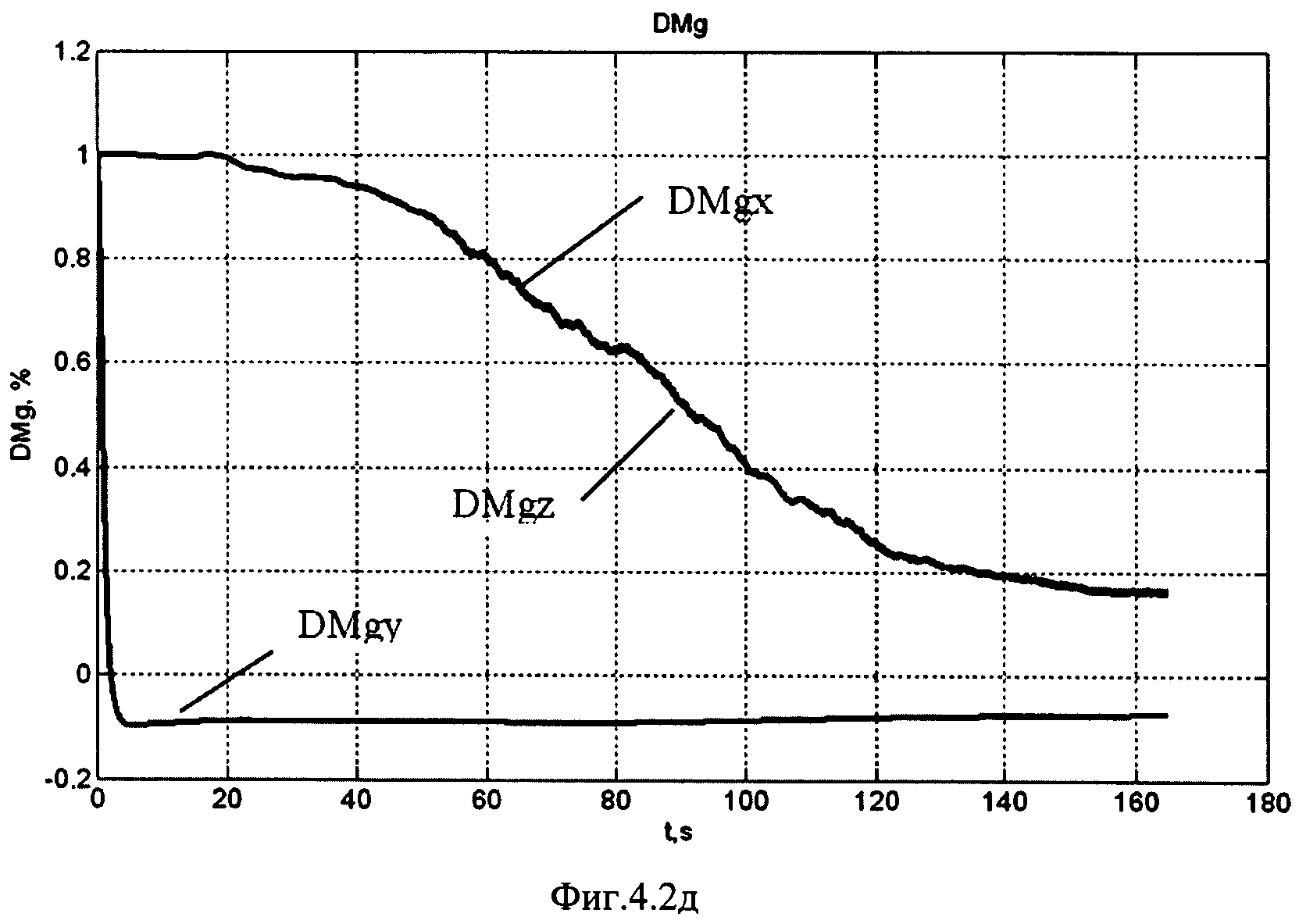
- DMgi, DMai (i=x, y, z) - ошибки оценки погрешностей масштабных коэффициентов гироскопа и акселерометра, установленных по продольной оси объекта;
- DDCf - ошибки оценки остаточной неоднозначности фазовых измерений.
Измеренные разности фаз и навигационное решение от приемника ПА СНС 1 в прототипе (фиг. 1а) обрабатываются в фильтре Калмана (ФК), реализованном в блоке БКОИ 6 вычислителя интегрированной системы, с тем, чтобы получить информацию об угле и угловой скорости крена. Для получения исходной информации о фазе несущей используются разнесенные по окружности в поперечной плоскости объекта четыре приемные антенны СНС (фиг. 1б). При этом используется короткая антенная база (менее длины волны), что исключает необходимость предварительного решения проблемы оценки неоднозначности фазовых измерений.
Данные от несвязанных с СНС источников информации, например БИИМ, оптимально обрабатываются в вычислителе интегрированной системы с данными ПА СНС, чтобы обновить навигационное решение и иметь дополнительную информацию об углах курса и тангажа.
Интерферометрический принцип формирования фазовых измерений в ПА СНС (фиг. 3) предполагает, что сигналы от одного HCi в виде плоской волны поступают на две антенны. Обоснованность предположения о плоском характере волны объясняется значительной удаленностью источника сигнала по сравнению с длиной j-й антенной базы -  .
.
Очевидно, что в единицах дальности полная разность фаз сигналов, принимаемых ПА СНС в точках размещения антенн Aj, А0 (фиг. 3) определяется как

где ∇rji - разность дальностей ρji до HCi на антенной базе  ,
,
λi - длина волны излучаемого HCi сигнала.
В общем случае, с учетом того факта, что длина антенной базы превышает длину волны, измерения первой разности фаз от HCi для j антенных баз (что представляет собой измеренное значение направляющего косинуса орта  относительно антенной j-й базы
относительно антенной j-й базы  .) можно представить в виде
.) можно представить в виде

где  - погрешность измерения разности псевдодальностей, обусловленная в основном различной нестабильностью опорных генераторов двух приемников СНС, размещенных в точках приема; ηji - целое число длин волн, неоднозначность в фазовых измерениях;
- погрешность измерения разности псевдодальностей, обусловленная в основном различной нестабильностью опорных генераторов двух приемников СНС, размещенных в точках приема; ηji - целое число длин волн, неоднозначность в фазовых измерениях;  - флуктуационная (шумовая) составляющая измерений.
- флуктуационная (шумовая) составляющая измерений.
В данном случае (в прототипе), когда используется один специализированный приемник с несколькими входами для подключения антенн и обеспечением синхронизации фазовых измерений от нескольких антенн, а также используется короткая антенная база (фиг. 1б), менее длины волны, выражение (2) можно записать в виде

Данные измерения формируются в вычислителе интегрированной системы по выходным данным ∇φji, блока БВПРФ 5 (фиг. 1а).
Располагая данными о декартовых координатах объекта  от ПА СНС 1 или
от ПА СНС 1 или  от БИИМ 4, корректируемого в блоке БКОИ 6 (фиг. 1а) по данным навигационного решения от СНС, и известными эфемеридами
от БИИМ 4, корректируемого в блоке БКОИ 6 (фиг. 1а) по данным навигационного решения от СНС, и известными эфемеридами  HCi (от ПА СНС 1) в гринвичской системе координат, в вычислителе интегрированной системы рассчитываются направляющие косинусы орта
HCi (от ПА СНС 1) в гринвичской системе координат, в вычислителе интегрированной системы рассчитываются направляющие косинусы орта  , соответственно,
, соответственно,
в гринвичской и географической системах координат:


где Ce,h_pr(λ,φ) - матрица перехода от гринвичских к географическим осям, как функция координат места объекта.
Значения  направляющих косинусов вектора
направляющих косинусов вектора  в связанных с объектом осях определяются как:
в связанных с объектом осях определяются как:

где [xAj, yAj, zAj]T,  - декартовые координаты точки расположения антенн Aj, А0 относительно начала связанной с объектом системы координат.
- декартовые координаты точки расположения антенн Aj, А0 относительно начала связанной с объектом системы координат.
Для нахождения искомого решения в вычислителе интегрированной системы реализуется известное соотношение [14]:

где Co,h(K,ψ,θ) - искомая матрица ориентации как функция углов K, ψ, θ.
Привлекая информацию об углах курса и тангажа, например от БИИМ, вычисляются текущие значения угла крена и угловой скорости крена. Данные БИИМ по углу крена здесь (в прототипе) могут использоваться в блоке БКОИ 6 для повышения точности и частоты выдачи угла крена, обеспечивая прогноз информации между фазовыми измерениями.
К недостаткам данной схемы построения интегрированной системы следует отнести:
- фазовые измерения используются только для выработки угла и угловой скорости по крену;
- погрешности по курсу в ряде приложений при длительном времени полета объекта могут достигать значительных величин;
- значительное число применяемых приемных антенн СНС.
Задачей изобретения является:
- использование фазовых измерений для повышения точности выработки углов курса и тангажа;
- минимизация числа используемых приемных антенн СНС;
- возможность использования стандартных приемников СНС с одним входом для подключения антенны при обеспечении непрерывного вычисления первых разностей фазовых измерений в условиях быстрого вращения объекта вокруг продольной оси.
Техническим результатом изобретения является повышение точности выработки угла и угловой скорости крена, а также повышение помехоустойчивости устройства.
Поставленная задача решается тем, что:
- на объекте устанавливаются по меньшей мере три приемные антенны СНС с одним специализированным приемником, имеющим три входа, или с тремя стандартными приемниками, каждый из которых имеет один вход для подключения антенны. При этом опорная антенна вместе с измерительным блоком БИИМ на микромеханических датчиках устанавливается в носовой части объекта по оси вращения, а две другие, с максимально возможным отстоянием по продольной оси от опорной антенны, расположены по окружности со смещением 180° в поперечной плоскости;
- разностные фазовые измерения СНС используются для оценки погрешностей БИИМ как по углу крена, так и углам курса и тангажа, а также для оценки погрешностей масштабных коэффициентов гироскопов и акселерометров, в том числе установленных по продольной оси объекта, вокруг которой осуществляется быстрое вращение;
- исключение неоднозначности фазовых измерений ПА СНС для наблюдаемых HCi осуществляется с опорой на данные БИИМ.
Реализация данных решений и представляет собой основное отличие предлагаемого устройства от прототипа.
Отличие ПА СНС 1 (фиг. 2а) предлагаемой схемы построения ИСОН от прототипа заключается в использовании либо одного специализированного приемника, имеющего три входа для подключения антенн, либо трех стандартных приемников, каждый из которых имеет один вход для подключения антенны. При этом на объекте соответствующим образом (фиг. 2б) устанавливаются три антенны (одна - опорная устанавливается в носовой части объекта по оси вращения, а две другие, с максимально возможным отстоянием по продольной оси от опорной антенны расположены по окружности со смещением 180° в поперечной плоскости), причем опорная антенна вместе с измерительным блоком БИИМ размещается в носовой части объекта по оси вращения.
Алгоритмическое обеспечение вычислителя БИИМ 4 (фиг. 2а) аналогично алгоритмам работы БИИМ прототипа 4 (фиг. 1а).
Отличие блока БКОИ 6 (фиг. 2а) предлагаемой схемы построения ИСОН от прототипа заключается в том, что в его состав дополнительно введен блок БФРФИ 8 формирования разностей  ,
,  расчетных и измеренных значений первых или вторых разностей фазовых измерений для двух антенных баз между опорной приемной антенной А0 и отстоящими от нее антеннами A1, А2. Выходные данные
расчетных и измеренных значений первых или вторых разностей фазовых измерений для двух антенных баз между опорной приемной антенной А0 и отстоящими от нее антеннами A1, А2. Выходные данные  ,
,  которого поступают на дополнительный вход блока БКОИ 6.
которого поступают на дополнительный вход блока БКОИ 6.
При этом разности расчетных и измеренных значений первых разностей фазовых измерений (достаточно использования фазовых измерений от одного HCi) формируются в блоке БВПРФ 5 при использовании специализированного приемника СНС с тремя входами для подключения антенн. Разности расчетных и измеренных значений вторых разностей фазовых измерений (необходимо использовать фазовые измерения как минимум от двух HCi) формируются в блоке БФРФИ 8 при использовании в составе ПА СНС трех стандартных приемников, каждый из которых имеет один вход для подключения антенны.
Алгоритмическое обеспечение блока БКОИ 6 вычислителя предлагаемой ИСОН представляет собой реализацию широко используемых алгоритмов фильтра Калмана, аналогичных используемым в прототипе.
В качестве входных данных блока БКОИ 6 для решения задачи калмановской фильтрации используются следующие измерения:
- разность расчетных и измеренных ПА СНС значений либо первичных навигационных параметров (псевдодальностей  и радиальных скоростей
и радиальных скоростей  для каждого из наблюдаемых HCi), либо готовых навигационных решений (по составляющим векторов координатам места
для каждого из наблюдаемых HCi), либо готовых навигационных решений (по составляющим векторов координатам места  и линейной скорости объекта
и линейной скорости объекта  соответственно);
соответственно);
- разность  ,
,  расчетных и измеренных ПА СНС значений первых или вторых разностей фазовых измерений для двух антенных баз.
расчетных и измеренных ПА СНС значений первых или вторых разностей фазовых измерений для двух антенных баз.
Выходными данными блока БКОИ 6 являются:
-  ,
,  ,
,  - оценки погрешностей ориентации по углам курса, тангажа и крена;
- оценки погрешностей ориентации по углам курса, тангажа и крена;
-  ,
,  - оценки погрешностей по координатам и вектору линейной скорости объекта;
- оценки погрешностей по координатам и вектору линейной скорости объекта;
-  ,
,  - оценки погрешностей масштабных коэффициентов гироскопов и акселерометров, в том числе установленных и по продольной оси объекта;
- оценки погрешностей масштабных коэффициентов гироскопов и акселерометров, в том числе установленных и по продольной оси объекта;
-  - оценки остаточной «скачкообразной» неоднозначности фазовых измерений.
- оценки остаточной «скачкообразной» неоднозначности фазовых измерений.
Использование дополнительных разностных фазовых измерений  ,
,  , поступающих из блока БФРФИ 8 позволяет повысить точности выработки углов крена, курса и тангажа.
, поступающих из блока БФРФИ 8 позволяет повысить точности выработки углов крена, курса и тангажа.
Кроме того, введены связи блока БФРФИ 8 с выходом блока БВПРФ 5 по текущим значениям ∇φji, первых разностей фаз сигналов HCi на несущей частоте, принятых на опорную и j-ю антенну, входами блока БКОИ 6 по данным от ПА СНС и БИИМ, и выходом блока БКОИ 6 по оценкам  остаточной неоднозначности фазовых измерений, обеспечивающие его функционирование.
остаточной неоднозначности фазовых измерений, обеспечивающие его функционирование.
Введена также дополнительная связь: выход блока БКОИ 6 по оценкам  ,
,  погрешностей масштабных коэффициентов гироскопов и акселерометров, установленных в том числе и по продольной оси объекта, с соответствующим входом вычислителя БИИМ 4.
погрешностей масштабных коэффициентов гироскопов и акселерометров, установленных в том числе и по продольной оси объекта, с соответствующим входом вычислителя БИИМ 4.
Отличия алгоритмического обеспечения вычислителя предлагаемой ИСОН от прототипа сводятся, прежде всего, к алгоритмическому обеспечению блока БФРФИ 8.
Входными данными блока БФРФИ 8 (фиг. 2а) являются:
- измеренные по данным ПА СНС 1 значения первых разностей фаз сигналов HCi от блока БВПРФ 5;
- значения координат или направляющих косинусов HCi от ПА СНС 1;
- значения координат места и вектора скорости движения объекта от вычислителя БИИМ 4;
- значения углов курса, тангажа и крена объекта от вычислителя БИИМ 4;
- оценки остаточных неоднозначностей фазовых измерений от блока БКОИ 6;
Выходными данными блока БФРФИ 8 являются:
- разности расчетных и измеренных значений первых или вторых разностей фаз сигналов HCi
 ,
,  для двух антенных баз b1 и b2.
для двух антенных баз b1 и b2.
В дополнение к измеренным значениям  направляющих косинусов орта
направляющих косинусов орта  относительно антенных баз
относительно антенных баз  , соответствующих согласно соотношению (2) текущим значениям ∇φji измеренных первых разностей фаз сигналов HCi, в блоке БФРФИ 8 (при использовании в составе ПА СНС нескольких приемников) формируются разности
, соответствующих согласно соотношению (2) текущим значениям ∇φji измеренных первых разностей фаз сигналов HCi, в блоке БФРФИ 8 (при использовании в составе ПА СНС нескольких приемников) формируются разности  измеренных значений направляющих косинусов для пары HCi, соответствующие текущим значениям измеренных вторых разностей фаз сигналов HCi:
измеренных значений направляющих косинусов для пары HCi, соответствующие текущим значениям измеренных вторых разностей фаз сигналов HCi:

Рассчитываются в блоке БФРФИ 8 приборные значения направляющих косинусов орта  относительно антенных баз
относительно антенных баз  для тех же наблюдаемых HCi:
для тех же наблюдаемых HCi:

где значения орта  - вычисляются согласно соотношениям (4), (5); а матрица ориентации Co,h_pr - по значениям углов K, ψ, θ от вычислителя БИИМ 4.
- вычисляются согласно соотношениям (4), (5); а матрица ориентации Co,h_pr - по значениям углов K, ψ, θ от вычислителя БИИМ 4.
Формируются также (при использовании в составе ПА СНС 1 нескольких приемников) и расчетные значения для вторых разностей фаз сигналов HCi:

Формирование вторых разностей фазовых измерений необходимо для исключения влияния расхождения шкал времени опорных генераторов приемников СНС 1, т.е. для исключения погрешности  из измерений (2).
из измерений (2).
Сравнивая расчетные и измеренные значения первых или вторых разностей фазовых измерений, формируются в блоке БФРФИ 8 разностные измерения:
- или (при использовании в составе ПА СНС 1 специализированного приемника с тремя входами)

- или (при использовании в составе ПА СНС 1 нескольких приемников с одним входом)

Данные измерения содержат с соответствующими весами в основном погрешности решения БИИМ задачи ориентации объекта (погрешности ΔCo,h_pr матрицы ориентации, однозначно связанные с погрешностями аналитического построения географического сопровождающего трехгранника: α, β, γ; где α - погрешность по курсу, β, γ - погрешности построения вертикали места), которые включают погрешности ориентации антенной базы  относительно связанных с объектом осей, погрешности знания координат места объекта и HCi, неоднозначности разностей фазовых измерений и шумы измерений, а также собственно шумы фазовых измерений ПА СНС.
относительно связанных с объектом осей, погрешности знания координат места объекта и HCi, неоднозначности разностей фазовых измерений и шумы измерений, а также собственно шумы фазовых измерений ПА СНС.
Полагая погрешности БИИМ по навигационным параметрам и параметрам ориентации объекта достаточно малыми, что обеспечивается при начальной выставке БИИМ, допустима линеаризация измерений (11). При этом вклад погрешностей БИИМ в измерения (11) не превышает половины длины волны излучаемого HCi сигнала.
Предварительная обработка разностных измерений (11) производится в блоке БФРФИ 8 (фиг. 2а) и заключается в исключении исходной неоднозначности фазовых измерений. Допустим, например, что в составе ПА СНС используется несколько приемников. Т.к. априори известно, что полезная информация вместе с шумами составляет менее одной длины волны излучаемого HCi сигнала в значениях приведенного измерения  , то исключая целое число (ηi+1-ηi) из значения
, то исключая целое число (ηi+1-ηi) из значения  и оставляя его дробную часть
и оставляя его дробную часть  , тем самым исключается из восстановленных измерений
, тем самым исключается из восстановленных измерений  неоднозначность фазовых измерений до уровня
неоднозначность фазовых измерений до уровня  . Остаточная неоднозначность фазовых измерений в пределах одной длины волны, как «скачкообразная» погрешность включается в число оцениваемых параметров.
. Остаточная неоднозначность фазовых измерений в пределах одной длины волны, как «скачкообразная» погрешность включается в число оцениваемых параметров.
Измерения  вместе с известными [18] разностными измерениями по навигационным параметрам поступают на вход блока БКОИ 6 вычислителя интегрированной системы (фиг. 2а) для последующей обработки с использованием алгоритмов фильтра Калмана.
вместе с известными [18] разностными измерениями по навигационным параметрам поступают на вход блока БКОИ 6 вычислителя интегрированной системы (фиг. 2а) для последующей обработки с использованием алгоритмов фильтра Калмана.
Оценки, выработанные в блоке БКОИ 6, поступают в обратную связь в вычислитель БИИМ 4 для коррекции погрешностей инерциального модуля в выработке параметров ориентации и навигационных параметров. А также для коррекции погрешностей масштабных коэффициентов гироскопа и акселерометра, установленных по продольной оси объекта. Это позволяет увеличить допустимый интервал времени работы ИСОН в автономном режиме на время «сбоев» ПА СНС 1. Кроме того, оценки остаточной неоднозначности фазовых измерений поступают на один из входов блока БФРФИ 8.
Анализ точности предлагаемого решения
Формирование измерений
- Разностные навигационные измерения
Как и в прототипе при использовании в его составе БИИМ, формируются разностные измерения по навигационным параметрам:
либо по псевдодальностям  и радиальным скоростям
и радиальным скоростям  для каждого из наблюдаемых HCi
для каждого из наблюдаемых HCi

( ,
,  - измеренные ПА СНС 1 и
- измеренные ПА СНС 1 и  ,
,  - расчетные по данным БИИМ и эфемеридной информации HCi значения), либо по координатам места и составляющим вектора линейной скорости объекта
- расчетные по данным БИИМ и эфемеридной информации HCi значения), либо по координатам места и составляющим вектора линейной скорости объекта

- Разностные фазовые измерения
Для случая использования в составе ПА СНС нескольких приемников линеаризованные разностные измерения (11б) для двух антенных баз  могут быть представлены в следующем виде:
могут быть представлены в следующем виде:
где
α, β, γ - погрешности (α - по курсу, β, γ - в построении вертикали места, характеризующих погрешности по углам тангажа и крена) задачи ориентации в построении географического трехгранника ENH, т.е. вычисления в БИИМ матрицы ориентации Co,h_pr;  ,
,  ,
,  - направляющие косинусы вектора антенной базы
- направляющие косинусы вектора антенной базы  в географических осях, т.е. элементы векторов
в географических осях, т.е. элементы векторов  ; sij, s(i+1)j, (j=E, N, H) - элементы орта
; sij, s(i+1)j, (j=E, N, H) - элементы орта  (направляющие косинусы орта
(направляющие косинусы орта  HCi относительно географических осей), формируемые согласно соотношениям (4), (5); ΔCf(i+1)-i - остаточная неоднозначность фазовых измерений в пределах одной длины волны; vzi - шумы измерений, включающие шумы измерений фазы несущей ПА СНС 1 и составляющие, обусловленные погрешностями знания координат места объекта и эфемеридной информации HCi, а также погрешностями привязки антенных баз к осям объекта.
HCi относительно географических осей), формируемые согласно соотношениям (4), (5); ΔCf(i+1)-i - остаточная неоднозначность фазовых измерений в пределах одной длины волны; vzi - шумы измерений, включающие шумы измерений фазы несущей ПА СНС 1 и составляющие, обусловленные погрешностями знания координат места объекта и эфемеридной информации HCi, а также погрешностями привязки антенных баз к осям объекта.
Следует заметить, что при вращении объекта из-за затенения HCi первые пол-оборота используются фазовые измерения для первой антенной базы  , вторые пол-оборота - для второй
, вторые пол-оборота - для второй  .
.
Расчетная модель погрешностей
При формировании расчетной модели погрешностей ИСОН использовались следующие аппроксимации:
- смещения нулей ММГ  и ММА
и ММА  , изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi и акселерометров ΔMai от запуска к запуску и их изменчивость в пуске были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
, изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi и акселерометров ΔMai от запуска к запуску и их изменчивость в пуске были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
- погрешности δD,  ПА СНС (смещения соответственно шкалы времени в единицах дальности и частоты опорного генератора в единицах радиальной скорости для опорной антенны в ПА СНС относительно данных HCi) были представлены расчетной моделью
ПА СНС (смещения соответственно шкалы времени в единицах дальности и частоты опорного генератора в единицах радиальной скорости для опорной антенны в ПА СНС относительно данных HCi) были представлены расчетной моделью  ,
,  , где коэффициент k2, характеризующий дрейф частоты опорного генератора, был аппроксимирован соответствующим винеровским процессом;
, где коэффициент k2, характеризующий дрейф частоты опорного генератора, был аппроксимирован соответствующим винеровским процессом;
- погрешности ΔCf(i+1)-i были аппроксимированы также соответствующими винеровскими процессами;
- шумы измерений vzi аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте формирования измерений;
- при формировании фазовых измерений используется одна пара HCi.
В этом случае расчетная модель погрешностей ИСОН будет иметь вид

где

- вектор состояния системы,
где ΔVE, ΔVN, ΔVH - погрешности в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси; Δφ, Δλ, Δh - погрешности выработки географических координат места (по широте, долготе и высоте); Фk+1/k - переходная на шаге Tz дискретности измерений матрица состояния системы; Гk+1≅Фk+1·dT - матрица, определяющая влияние вектора входных шумов wk с ковариациями Qk; Hk+1 - матрица измерений, соответствующая уравнениям (12) и (13); vk+1 - шумы измерений.
Результаты имитационного моделирования алгоритмов работы ИСОН в пакете MATLAB (Simulink)
Моделирование осуществлялось при следующих исходных данных:
- характеристики Земли и гравитационного поля
R=6378163 - средний экваториальный радиус Земли, (м);
Ue=7.2921151467·10-5, (рад/с); tgr0=0;
- ускорения от силы тяжести - 
 ,
,
где g0=9.78049 - ускорение силы тяжести на экваторе земного эллипсоида (м/с2); β=0.005317 (безразмерная величина, имеет порядок малости α3); a, b - большая и малая полуоси эллипсоида вращения Земли;  - квадрат первого эксцентриситета эллипсоида вращения Земли; α3=(a-b)/а - сжатие; а=6378136 (м); α3=1/298.25784 - параметры общеземного эллипсоида ПЗ-90;
- квадрат первого эксцентриситета эллипсоида вращения Земли; α3=(a-b)/а - сжатие; а=6378136 (м); α3=1/298.25784 - параметры общеземного эллипсоида ПЗ-90;
Погрешности ММГ в проекциях на оси xbybzb ИБ:
- ΔMgx, ΔMgy, ΔMgz - нестабильность масштабных коэффициентов ММГ - случайные величины с уровнем (1σ);
-  ,
,  ,
,  - систематические составляющие дрейфов ММГ в проекциях на оси xbybzb ИБ, которые характеризуют смещение нулей от пуска к пуску - случайные величины с уровнем (1σ);
- систематические составляющие дрейфов ММГ в проекциях на оси xbybzb ИБ, которые характеризуют смещение нулей от пуска к пуску - случайные величины с уровнем (1σ);
- Δωxb, Δωyb, Δωzb - случайные составляющие дрейфов ММГ, которые характеризуют дрейф нуля в пуске - марковские процессы первого порядка σ1gi, µgi (i=xb, yb, zb);
- флуктуационные составляющие дрейфов ММГ в проекциях на оси ИБ - дискретные белые шумы на рабочей частоте σ2gi;
- αxy, αxz, αyx, αyz, αzx, αzy - погрешности ортогонализации осей чувствительности гироскопов - случайные величины с уровнем (1σ) 10 угл.с.;
Погрешности линейных акселерометров в проекциях на оси xbybzb ИБ:
- ΔMax, ΔMay, ΔMaz - нестабильность масштабных коэффициентов линейных акселерометров - случайные величины с уровнем (1σ);
-  ,
,  ,
,  - смещение нулей линейных акселерометров - случайные величины с уровнем (1σ);
- смещение нулей линейных акселерометров - случайные величины с уровнем (1σ);
- Δa xb, Δa yb, Δa zb - дрейфы нулей линейных акселерометров - марковские процессы первого порядка σ1ai, µai;
- флуктуационные составляющие погрешностей акселерометров в проекциях на оси xbybzb ИБ - дискретные белые шумы на рабочей частоте σ2ai.
ПА СНС:
- шумы измерений (1σ)
- по координатам места - 10 (м);
- по составляющим вектора линейной скорости - 0.1 (м/с).
Характеристики ИБ БИИМ на ММД:
- Модель погрешностей ММА
ΔМах=-1*1е-2; ΔMay=1*1е-2; Maz=1*1е-2;

σ1ai=0.01 (м/с2); µai=0.01 (с-1); σ2ai=0.02/sqrt(dt), (м/с2); (i=xb, yb, zb)
- Модель погрешностей гироскопов (ММГ)
ΔMgx=1*1е-2; ΔMgy=-1*1e-2; ΔMgz=1*1e-2;

σ1gi=30*5е-6 (рад/с); µgi=0.01 (с-1); σ2gi=36*5e-6/sqrt(dt), (рад/с) или 0.01°/с/Гц½;(i=xb, yb, zb);
- погрешности начальной выставки БИИМ (t=0)
α0=-0.2°*pi/180; β0=0.1°*pi/180; γ0=-0.1°*pi/180;
ΔVE0=0.1 (м/с); ΔVN0=-0.1 (м/с); ΔVH0=0.1 (м/с);
Δφ0=3 м/R; Δλ0=-3м/(R*cos(fio*pi/180)); Δh0=3 м;
Рабочие частоты при моделировании
dt=0.001 с; - дискретность имитационного моделирования движения объекта по траектории (1 кГц);
dT=0.001 с - дискретность работы алгоритмов БИИМ (1 кГц);
dT1=dT - дискретность работы ковариационного канала ФК;
Tz=0.03 с - дискретность обработки измерений в ФК (дискретность данных СНС).
Параметры траектории движения объекта приведены на фигурах 4.1а и 4.1б.
По параметрам ориентации объекта были приняты следующие условия движения:
- по курсу: K=Ko=90°;
- по тангажу: изменение угла на траектории полета от +50° до -20°;
- по крену: вращение с постоянной угловой скоростью  , при fθ=1 Гц, θ0=0°.
, при fθ=1 Гц, θ0=0°.
Погрешности ИСОН
Погрешности выработки параметров ориентации без использования фазовых измерений приведены на фигурах 4.2а, 4.2б (на фиг. 4.2б приведен график фиг. 4.2а в укрупненном по времени масштабе на момент старта). Аналогичные погрешности, но с использованием фазовых измерений приведены на фиг. 4.2в, 4.2г (на фиг. 4.2г приведен график фиг. 4.2в в укрупненном по времени масштабе на момент старта). На фиг. 4.2д и 4.2е приведены ошибки оценки погрешностей масштабных коэффициентов ММД. На фиг. 4.2ж приведены ошибки оценки неоднозначности фазовых измерений.
Математическое моделирование и результаты решения задачи ориентации объекта в предлагаемой схеме построения ИСОН, приведенные на фиг. 4.2а-4.2ж, подтверждают эффективность данного решения. При этом предлагаемое решение допускает перерывы в поступлении данных от ПА СНС и позволяет эффективно обеспечивать отбраковку недостоверных измерений.
Список литературы
1. Гай Э. Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS // Гироскопия и навигация, 1998, №3(22), с. 72-81.
2. Дишель В.Д., Быков А.К. и др. Анализ результатов первого летного испытания интегрированной инерциально-спутниковой системы навигации, ориентации и траекторного контроля ракеты-носителя и разгонного блока при выведении космического аппарата «Амос-2» на геостационарную орбиту // Гироскопия и навигация, 2004, №3 (46), с. 80.
3. В.A. Blazhnov, G.I. Yemeliantsev, D.A. Koshaev and other. A Tightly Coupled Integrated Inertial Satellite System of Attitude and Navigation. - 16th Saint Petersburg International Conference on Integrated Navigation Systems, proceedings, 2009, pp. 182-190. ISBN 978-5-900780-69-6.
4. Патент США №6417802.
5. Патент США №6640189.
6. Патент РФ №2087867.
7. Патент РФ №2233431.
8. Патент РФ №2263282.
9. Заявка РФ №98118543.
10. Патент РФ №2215299.
11. Патент РФ №2276384.
12. Интегрированная инерциально-спутниковая система ориентации и навигации с разнесенными антеннами // Сборник «Интегрированные инерциально-спутниковые системы навигации». - СПб: ЦНИИ «Электроприбор», 2001, с. 222-229.
13. Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами // Гироскопия и навигация, 2007, №1 (56), с. 16-28.
14. Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация, 1999, №2 (25), с. 30-55.
15. Водичева Л.В., Алиевская Е.Л., Кокщаров Е.А., Парышева Ю.В. Повышение точности определения угловой скорости быстровращающихся объектов. // Гироскопия и навигация, 2012, №1 (76), с. 27-41.
16. Патент США №6208936.
17. Заявка № US 2010/0117894.
18. Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов / под общей ред. акад. РАН В.Г. Пешехонова, - СПб: ФГУП «ЦНИИ «Электроприбор», 2003, с. 389.
Интегрированная система ориентации и навигации для объектов с быстрым вращением вокруг продольной оси, содержащая приемную аппаратуру спутниковой навигационной системы (СНС), включающую по меньшей мере три приемные антенны СНС, разнесенные на соответствующих антенных базах на объекте, один приемник СНС с по меньше мере тремя входами для подключения антенн или по меньшей мере три приемника СНС, каждый с одним входом для подключения антенны, бескарданный инерциальный измерительный модуль (БИИМ), включающий измерительный блок (ИБ) с блоками гироскопов и акселерометров, например микромеханических гироскопов и акселерометров, и навигационный вычислитель, первый и второй входы которого соединены с выходами блока акселерометров и блока гироскопов, а также вычислитель интегрированной системы, включающий блок выработки первых разностей фаз (БВПРФ) сигналов навигационных спутников на несущей частоте, блок комплексной обработки информации (БКОИ) с фильтром типа фильтра Калмана, при этом вход или входы блока БВПРФ соединены с третьим выходом или третьими выходами приемников СНС по измерению фазы несущей, а выход блока БВПРФ соединен с первым входом блока БКОИ, второй и третий входы которого соединены соответственно с первыми и вторыми выходами приемников СНС по измеренным значениям псевдодальности, псевдорадиальной скорости до навигационных спутников или по координатам места объекта, вектору его линейной скорости, четвертый вход блока БКОИ соединен с четвертым выходом одного из приемников СНС по координатам или направляющим косинусам навигационных спутников, пятый вход блока БКОИ соединен с первым выходом вычислителя БИИМ по углам курса, тангажа и крена, а шестой его вход соединен со вторым выходом вычислителя БИИМ по координатам места и вектору линейной скорости объекта, при этом первый выход блока БКОИ по оценкам погрешностей угла курса, тангажа и крена соединен с третьим входом вычислителя БИИМ, его второй выход по оценкам погрешностей координат места и составляющим вектора линейной скорости объекта соединен с четвертым входом вычислителя БИИМ, а первый и второй выходы вычислителя БИИМ соответственно по углам курса, тангажа, крена и координатам места, вектору линейной скорости объекта соединены также с интерфейсом потребителя, отличающаяся тем, что в состав вычислителя интегрированной системы дополнительно введен блок формирования разности расчетных и измеренных значений первых или вторых разностей фазовых измерений (БФРФИ) для двух антенных баз между опорной А0 приемной антенной СНС и отстоящими от нее A1, А2 антеннами, первый вход которого соединен с выходом блока БВПРФ по измеренным значениям первых разностей фаз сигналов навигационных спутников, второй вход блока БФРФИ соединен с четвертым входом блока БКОИ по координатам или направляющим косинусам навигационных спутников, его третий вход соединен с пятым входом блока БКОИ по углам курса, тангажа и крена, четвертый вход блока БФРФИ соединен с шестым входом блока БКОИ по координатам места объекта, а его пятый вход соединен с дополнительным четвертым выходом блока БКОИ по оценкам остаточных неоднозначностей фазовых измерений, выход блока БФРФИ соединен с дополнительным седьмым входом блока БКОИ, дополнительный третий выход БКОИ по оценкам погрешностей масштабных коэффициентов гироскопов и акселерометров, установленных в том числе и по продольной оси объекта, соединен с пятым входом вычислителя БИИМ, при этом опорная приемная антенна (АО) СНС вместе с ИБ БИИМ устанавливаются в носовой части объекта по оси вращения, а две других антенны (A1, А2) СНС размещаются с максимально возможным отстоянием по продольной оси от опорной антенны и расположены по окружности со смещением 180° в поперечной плоскости объекта.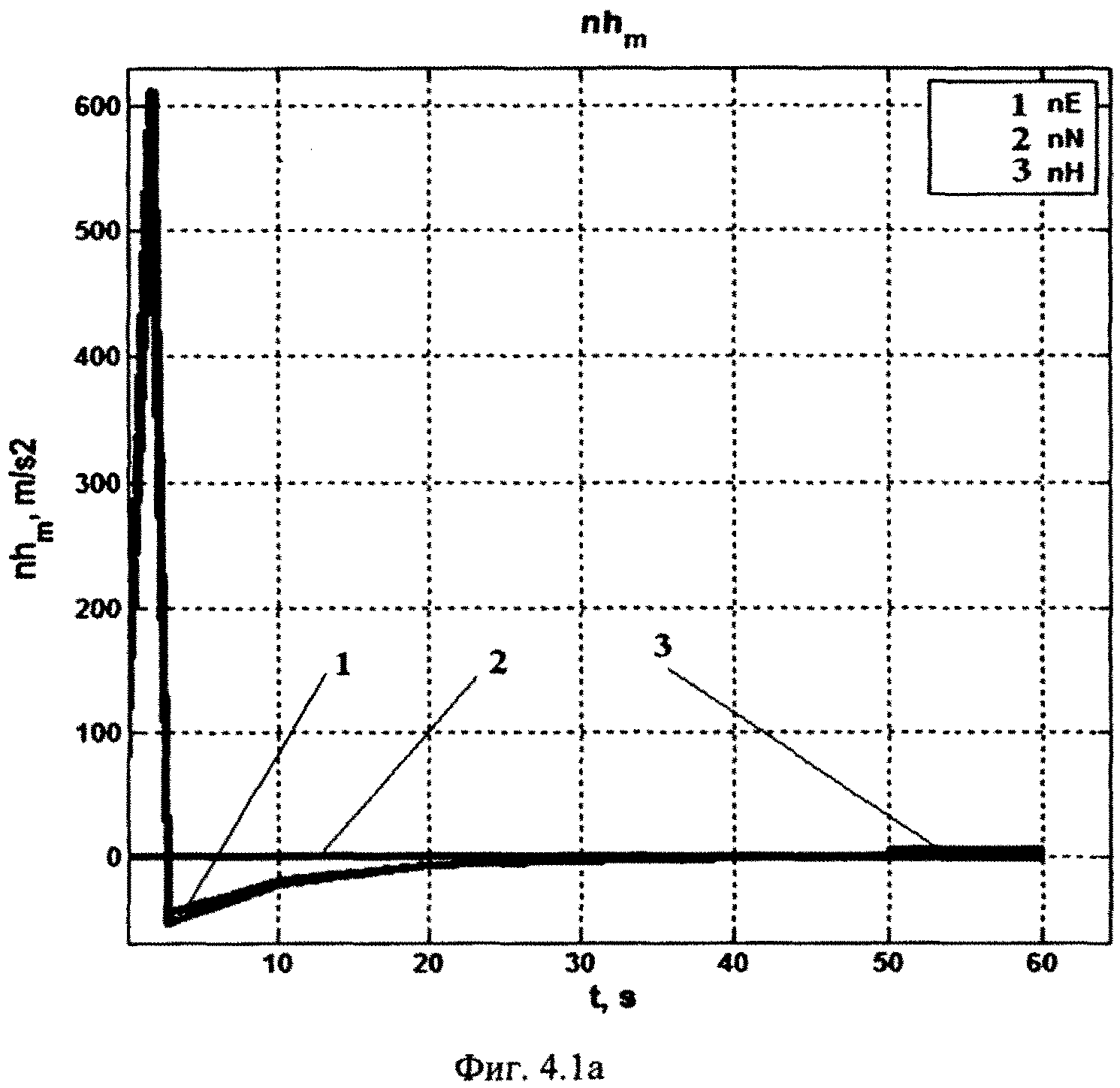
Движительно-рулевое устройство
Силовая установка подводного аппарата
Двигательно-движительная установка подводного аппарата
Устройство управления приводом ведущих колес транспортного средства с расширенными функциональными возможностями
Способ работы двигателя на газообразном топливе
Несущая конструкции полужесткого дирижабля или вертостата
Датчик дифференциального давления
Датчик давления
Способ изготовления осесимметричных сварных оболочек, работающих под высоким давлением
Двухплатформенный комплекс плавучих средств для строительства, ремонта и обследования морских трубопроводов и сооружений в ледовых условиях
Шлифовальный круг
Опускное подводное устройство
Теплообменное устройство
Двигатель внутреннего сгорания
Система для обеспечения технического обслуживания и ремонта подводных добычных комплексов в ледовых условиях
Способ стабилизации полета экраноплана и экраноплан для реализации этого способа
Подводная обсерватория
Инфракрасный коллиматорный комплекс
Смазочная композиция синтетического турбинного масла для паротурбинных установок
Способ создания предварительного напряжения в районе соединения стыкуемых элементов предварительно напряженного железобетонного понтона

