Результат интеллектуальной деятельности: РОБОТ-ПЫЛЕСОС
Вид РИД
Изобретение
Известный уровень техники
В общем случае, роботы были разработаны для промышленности, чтобы взять на себя управление частью фабричной автоматики. В последние годы области применения роботов были расширены. В результате разрабатываются медицинские роботы, воздушно-космические роботы и т.п., а также производятся домашние роботы, используемые в обычных домах.
Характерные примеры домашних роботов могут включать в себя роботы-пылесосы. Роботы-пылесосы являются одним из типов бытовых электроприборов, которые всасывают окружающую пыль или посторонние вещества, при этом перемещаясь самостоятельно внутри предварительно определенной зоны для выполнения уборки. Такой робот-пылесос может включать в себя заряжающийся аккумулятор и датчик препятствий для избегания препятствий во время перемещения. Таким образом, робот-пылесос может выполнять уборку, при этом перемещаясь самостоятельно.
Сущность изобретения
Варианты осуществления обеспечивают робот-пылесос.
В одном варианте осуществления робот-пылесос включает в себя: основной корпус, определяющий внешний вид робота-пылесоса; блок перемещения для перемещения или вращения основного корпуса; множество блоков приема, расположенных в основном корпусе, для приема пользовательской голосовой команды; и управляющий блок, распознающий направление возникновения команды вызова, когда голосовая команда, введенная от множества блоков приема, является командой вызова, причем управляющий блок управляет блоком перемещения так, чтобы основной корпус перемещался в распознанном направлении возникновения команды вызова по предварительно установленному обходному пути, когда основной корпус не имеет возможности вращения в направлении возникновения команды вызова.
В другом варианте осуществления робот-пылесос включает в себя: основной корпус, включающий в себя блок приема; блок перемещения для перемещения основного корпуса; управляющий блок для управления блоком перемещения; блок распознавания голоса для анализа образца голосовой команды, введенного в блок приема, для обнаружения, введена ли команда вызова; блок обнаружения направления для обнаружения направления, с которого возникает команда вызова; и блок обнаружения для определения, имеет ли основной корпус возможность вращаться в направлении возникновения голосовой команды в позиции, в которой находится основной корпус, когда возникает голосовая команда, причем, когда основной корпус не имеет возможности перемещения в направлении возникновения голосовой команды, основной корпус управляет блоком перемещения так, чтобы основной корпус перемещался в направлении возникновения голосовой команды по обходному пути (Pd).
В дополнительном варианте осуществления способ для управления роботом-пылесосом включает в себя: прием голосовой команды пользователя посредством блока приема робота-пылесоса; обнаружение направления к позиции вызова, в которой возникает голосовая команда; обнаружение текущей позиции робота-пылесоса; определение, имеет ли робот-пылесос возможность перемещения от текущей позиции в направлении к позиции вызова по прямолинейному пути (PL); перемещение робота-пылесоса в направлении к позиции вызова по предварительно установленному обходному пути, когда робот-пылесос не имеет возможности перемещения по прямолинейному пути (PL); и завершение перемещения робота-пылесоса в направлении к позиции вызова.
Подробности одного или нескольких вариантов осуществления излагаются на сопроводительных чертежах и в описании ниже. Другие признаки станут очевидны из описания и чертежей и из формулы изобретения.
Краткое описание чертежей
Фиг.1 изображает вид в перспективе робота-пылесоса согласно первому варианту осуществления.
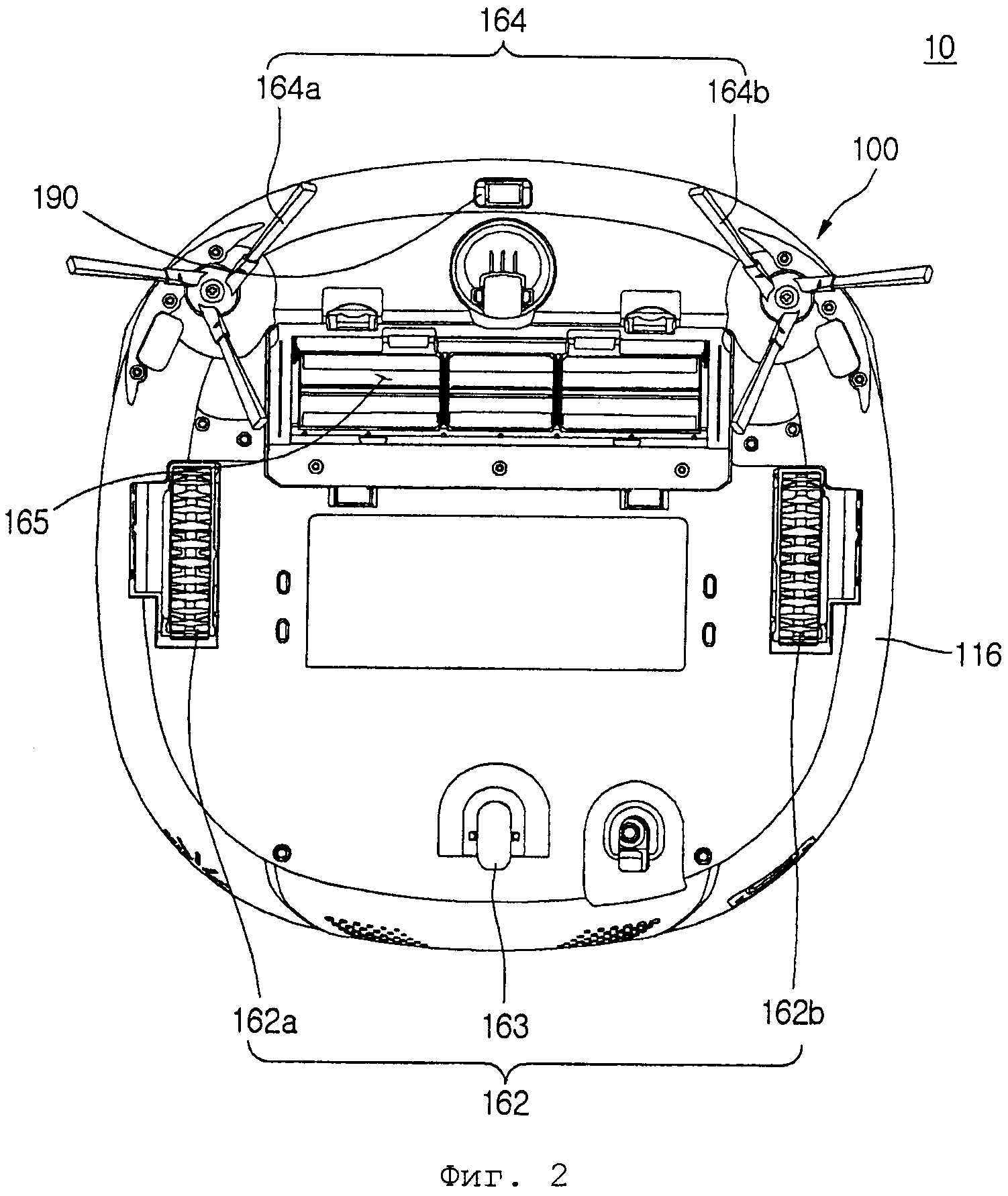
Фиг.2 изображает вид снизу робота-пылесоса согласно первому варианту осуществления.
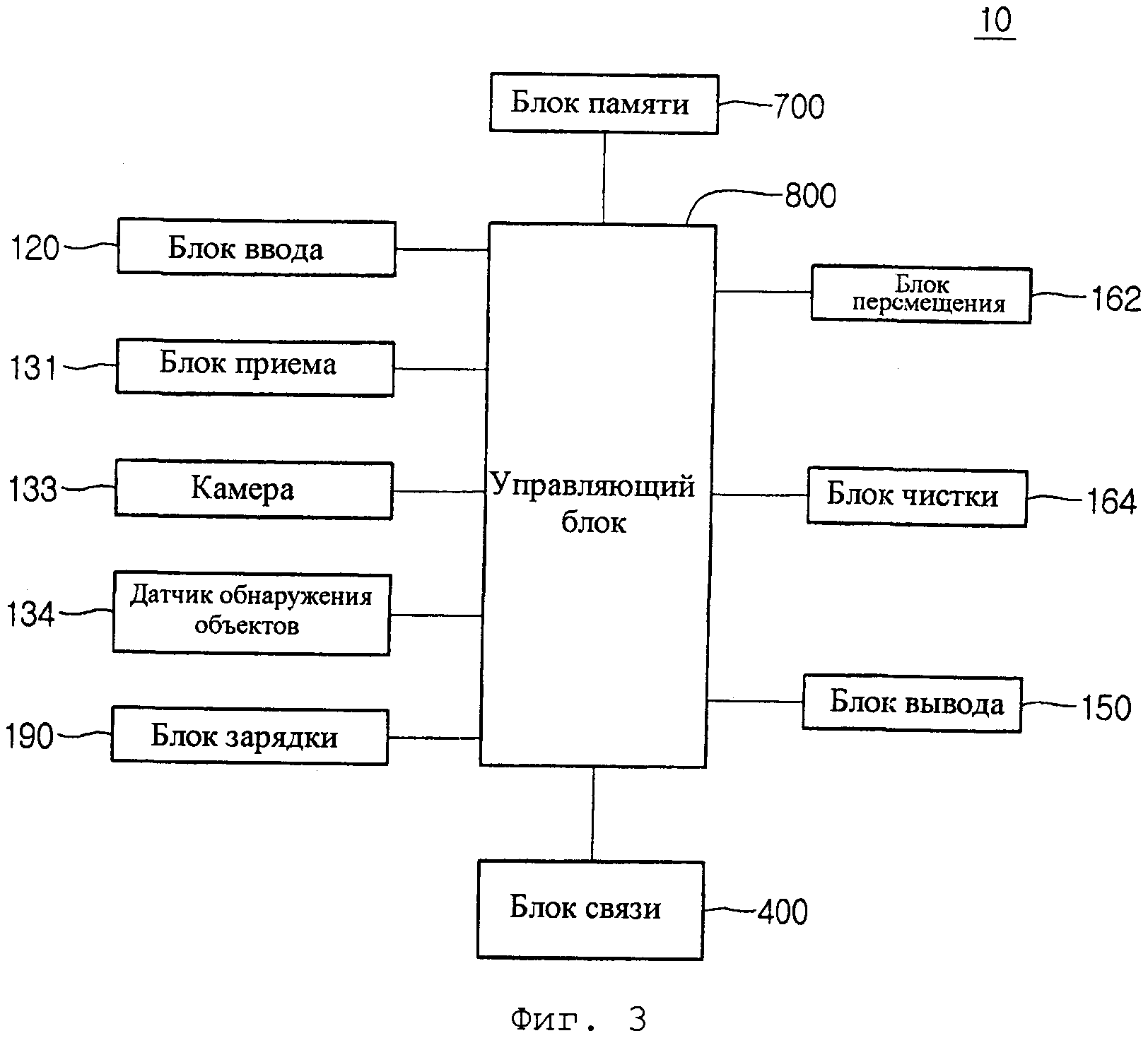
Фиг.3 изображает структурную схему робота-пылесоса согласно первому варианту осуществления.
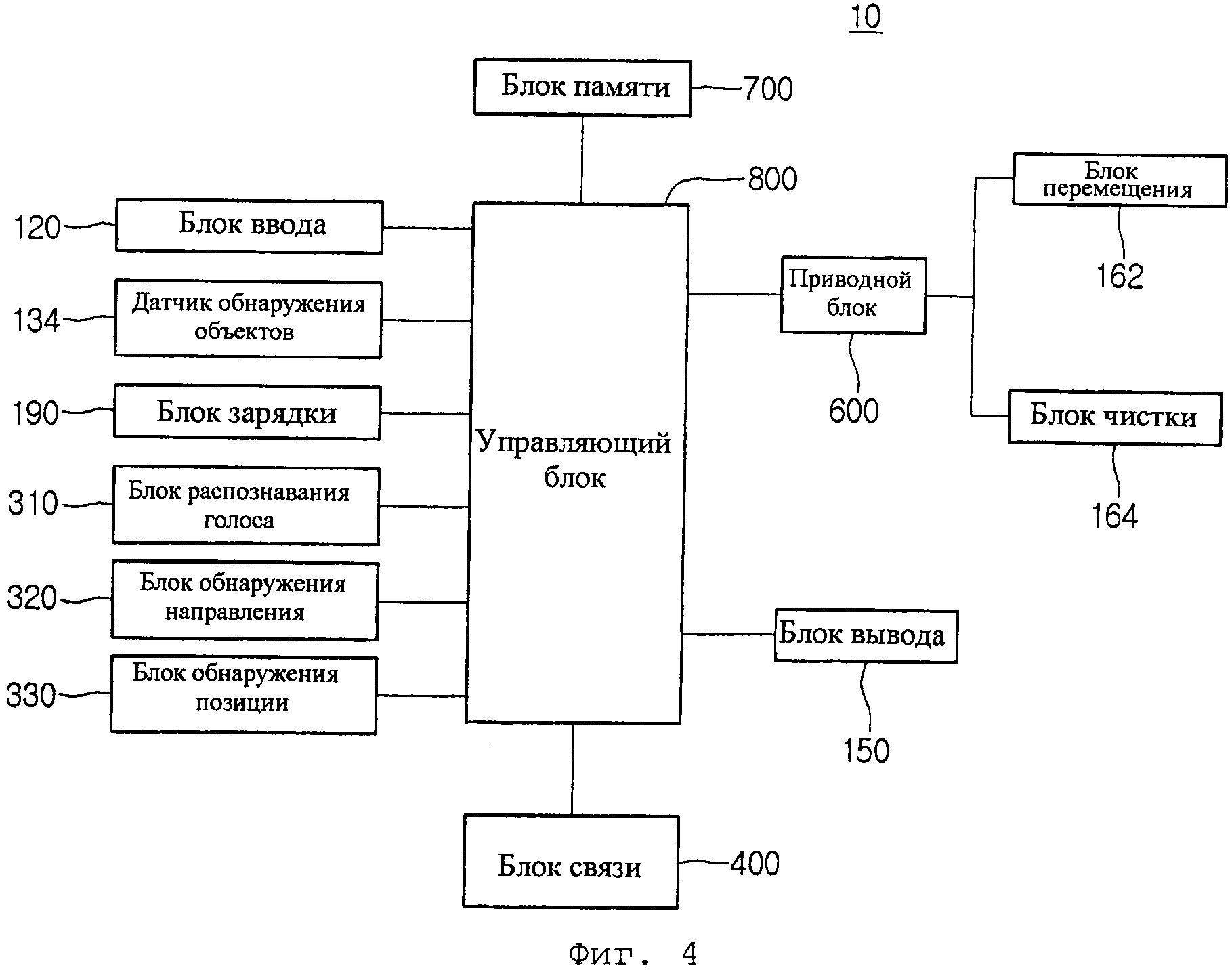
Фиг.4 изображает структурную схему робота-пылесоса согласно второму варианту осуществления.
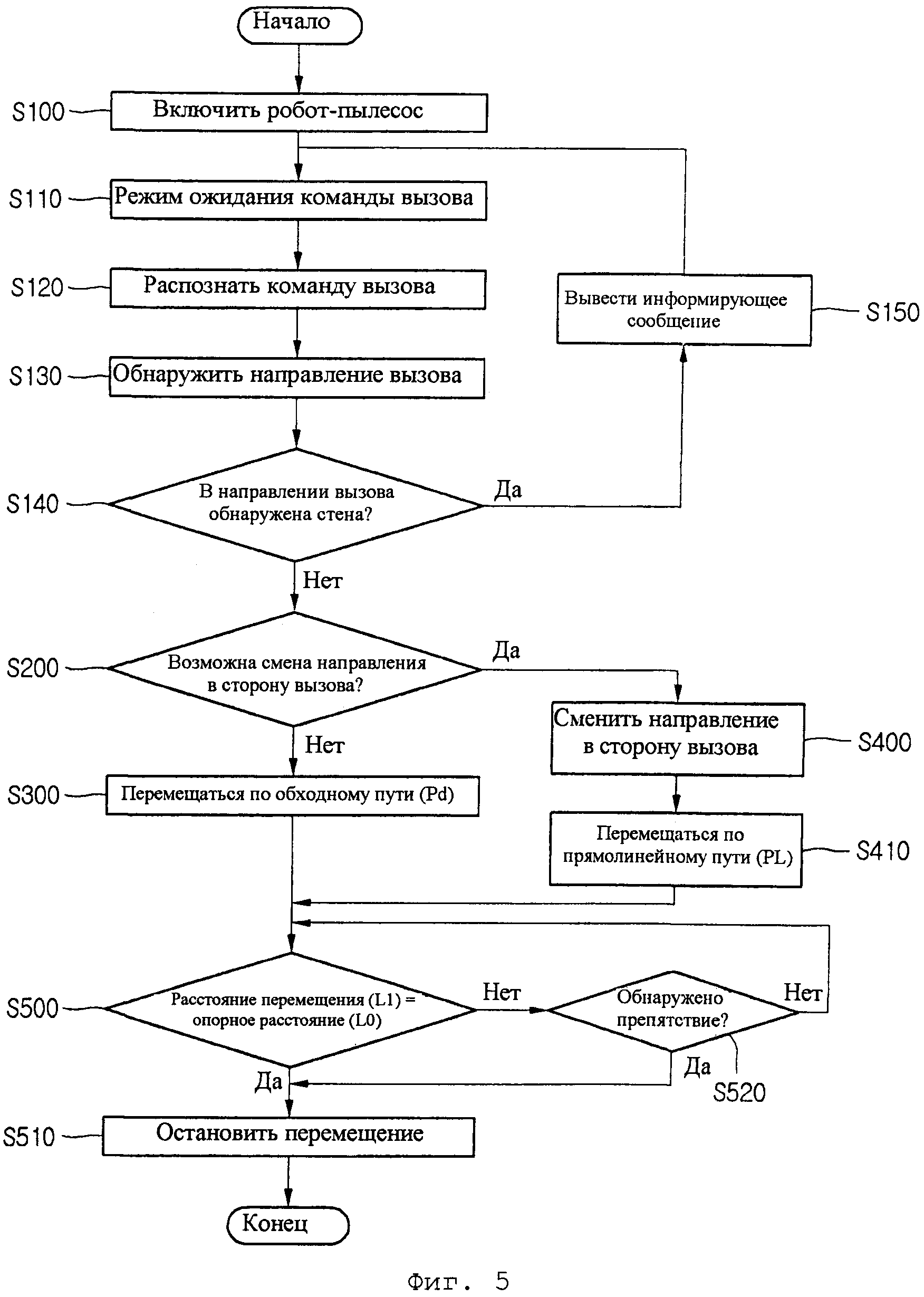
Фиг.5 изображает блок-схему, иллюстрирующую способ для управления роботом-пылесосом согласно первому варианту осуществления.
Фиг.6 изображает блок-схему, иллюстрирующую перемещение по обходному пути Pd согласно первому варианту осуществления.
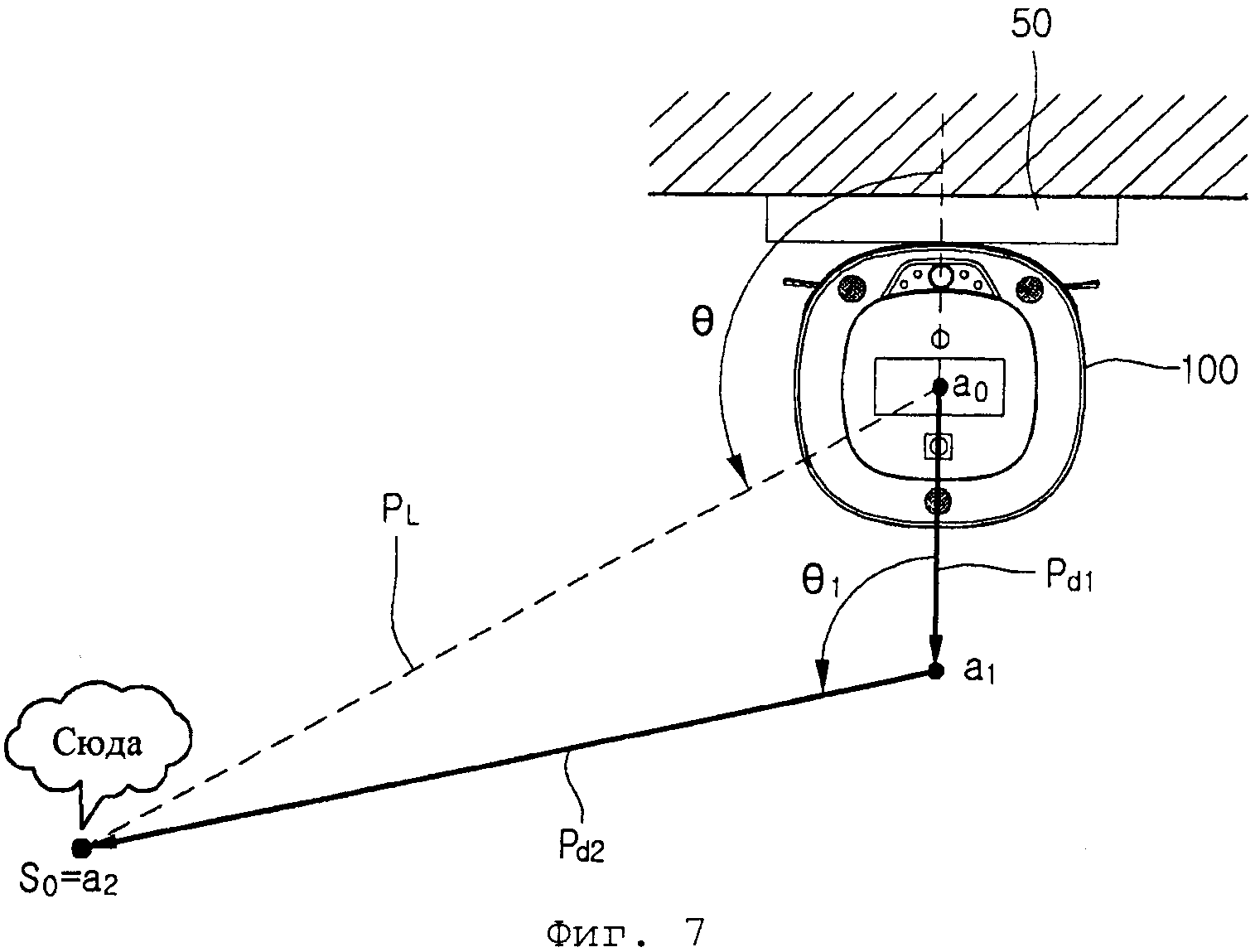
Фиг.7 изображает вид для объяснения операции перемещения по обходному пути Pd согласно первому варианту осуществления.
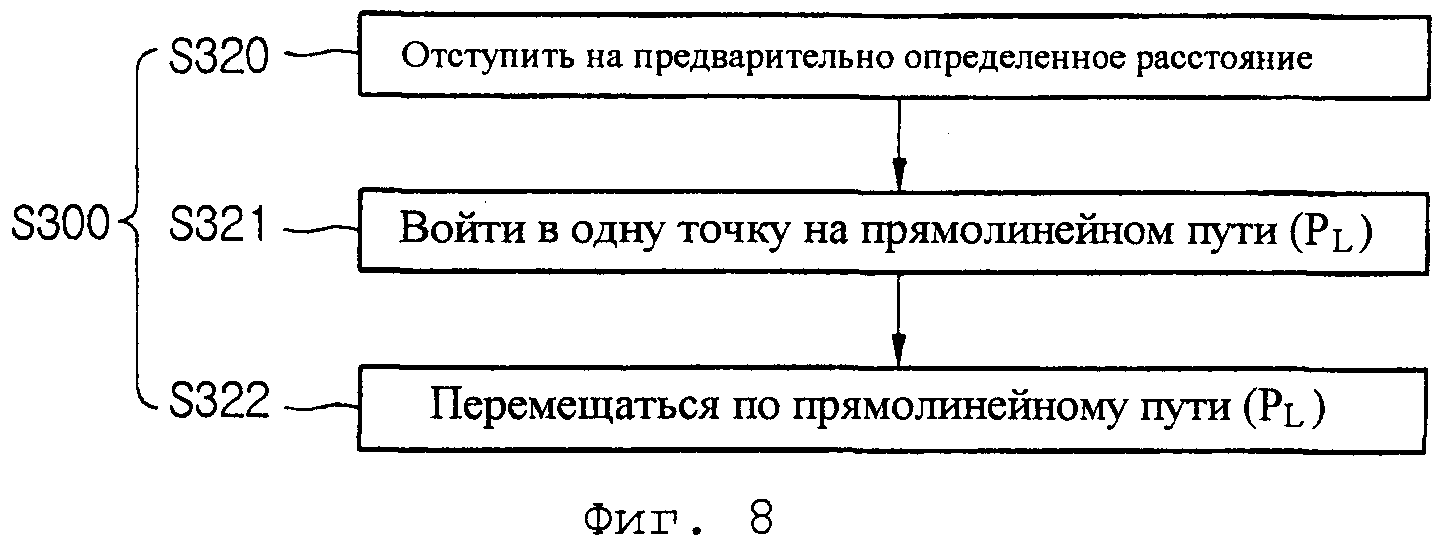
Фиг.8 изображает блок-схему, иллюстрирующую перемещение по обходному пути Pd согласно третьему и четвертому вариантам осуществления.
Фиг.9 изображает вид для объяснения операции перемещения по обходному пути Pd согласно третьему варианту осуществления.
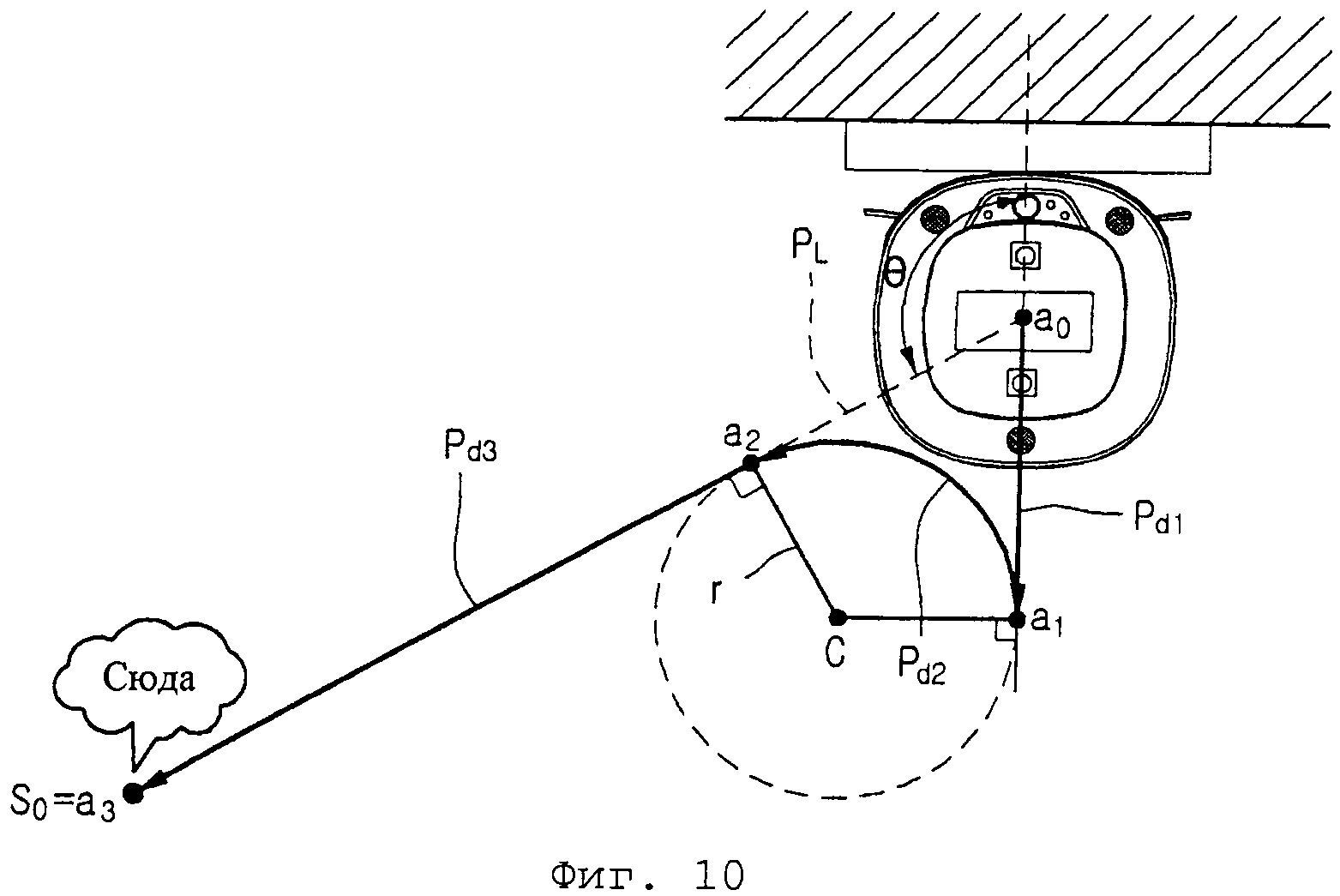
Фиг.10 изображает вид для объяснения операции перемещения по обходному пути Pd согласно четвертому варианту осуществления.
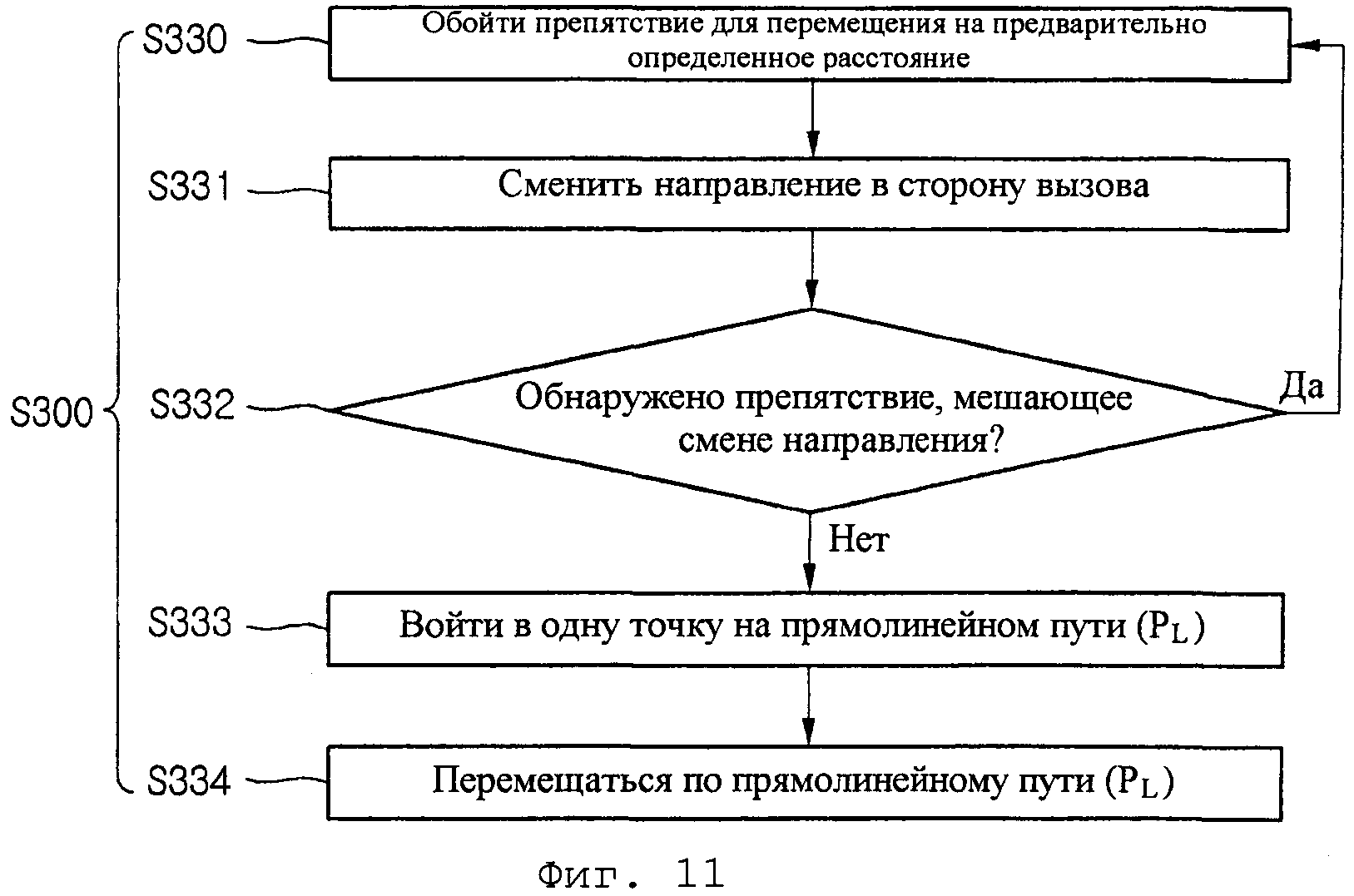
Фиг.11 изображает блок-схему, иллюстрирующую перемещение по обходному пути Pd согласно пятому варианту осуществления.
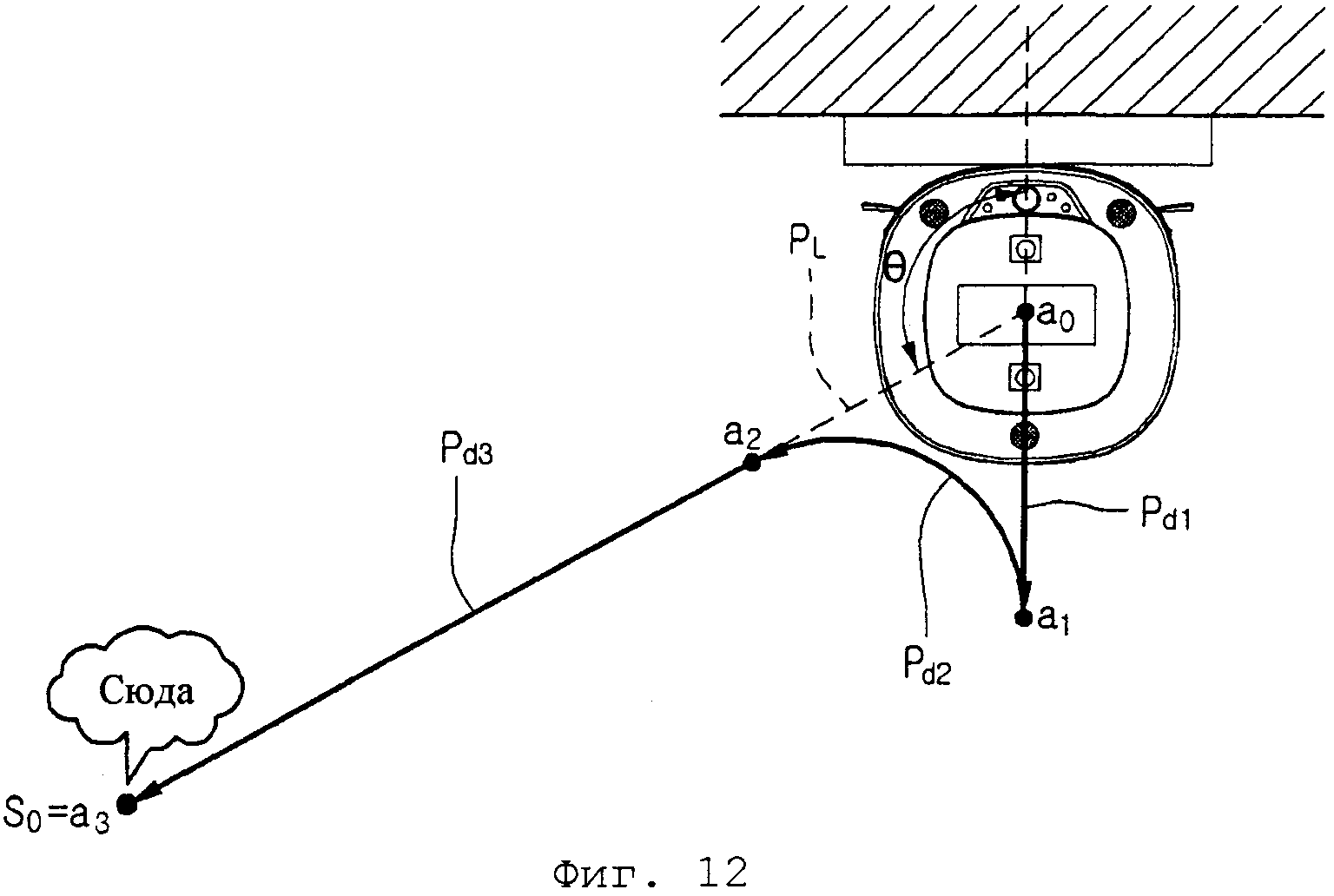
Фиг.12 изображает вид для объяснения операции перемещения по обходному пути Pd согласно пятому варианту осуществления.
Подробное описание вариантов осуществления
Теперь будет сделана подробная ссылка на варианты осуществления настоящего раскрытия, примеры которых иллюстрируются на сопроводительных чертежах.
В последующем подробном описании предпочтительных вариантов осуществления ссылка делается на сопроводительные чертежи, которые образуют его часть и на которых изображены в качестве иллюстрации конкретные предпочтительные варианты осуществления, в которых изобретение может осуществляться на практике. Эти варианты осуществления описаны достаточно подробно, чтобы обеспечить специалистам в данной области техники возможность осуществления изобретения на практике, и следует понимать, что могут задействоваться другие варианты осуществления и что логические, структурные, механические, электрические и химические изменения могут выполняться без выхода за пределы сущности или объема изобретения. Во избежание подробностей, не необходимых для обеспечения специалистам в данной области техники возможности осуществления изобретения на практике, в описании может опускаться некоторая информацию, известная специалистам в данной области техники. Последующее подробное описание, таким образом, не следует воспринимать в ограничивающем смысле.
Далее будут описаны варианты осуществления настоящего раскрытия со ссылками на чертежи, чтобы специалисты в данной области техники без труда оценили объем идеи изобретения. Кроме того, подробные описания, относящиеся к широко известным функциям или конфигурациям, будут опущены, чтобы излишне не затемнять сущность настоящего раскрытия. Здесь подобные ссылочные позиции по всему тексту обозначают подобные элементы.
В этом раскрытии ниже, когда одна часть (или элемент, устройство и т.д.) упоминается как "подключенная" к другой части (или элементу, устройству и т.д.), следует понимать, что первая может быть "непосредственно подключена" к последней или "опосредованно подключена" к последней через промежуточную часть (или элемент, устройство и т.д.). Кроме того, когда описывается, что нечто содержит (или включает в себя, или имеет) некоторые элементы, следует понимать, что оно может содержать (или включать в себя, или иметь) только эти элементы или оно может содержать (или включать в себя, или иметь) другие элементы, а также эти элементы, если нет конкретного ограничения.
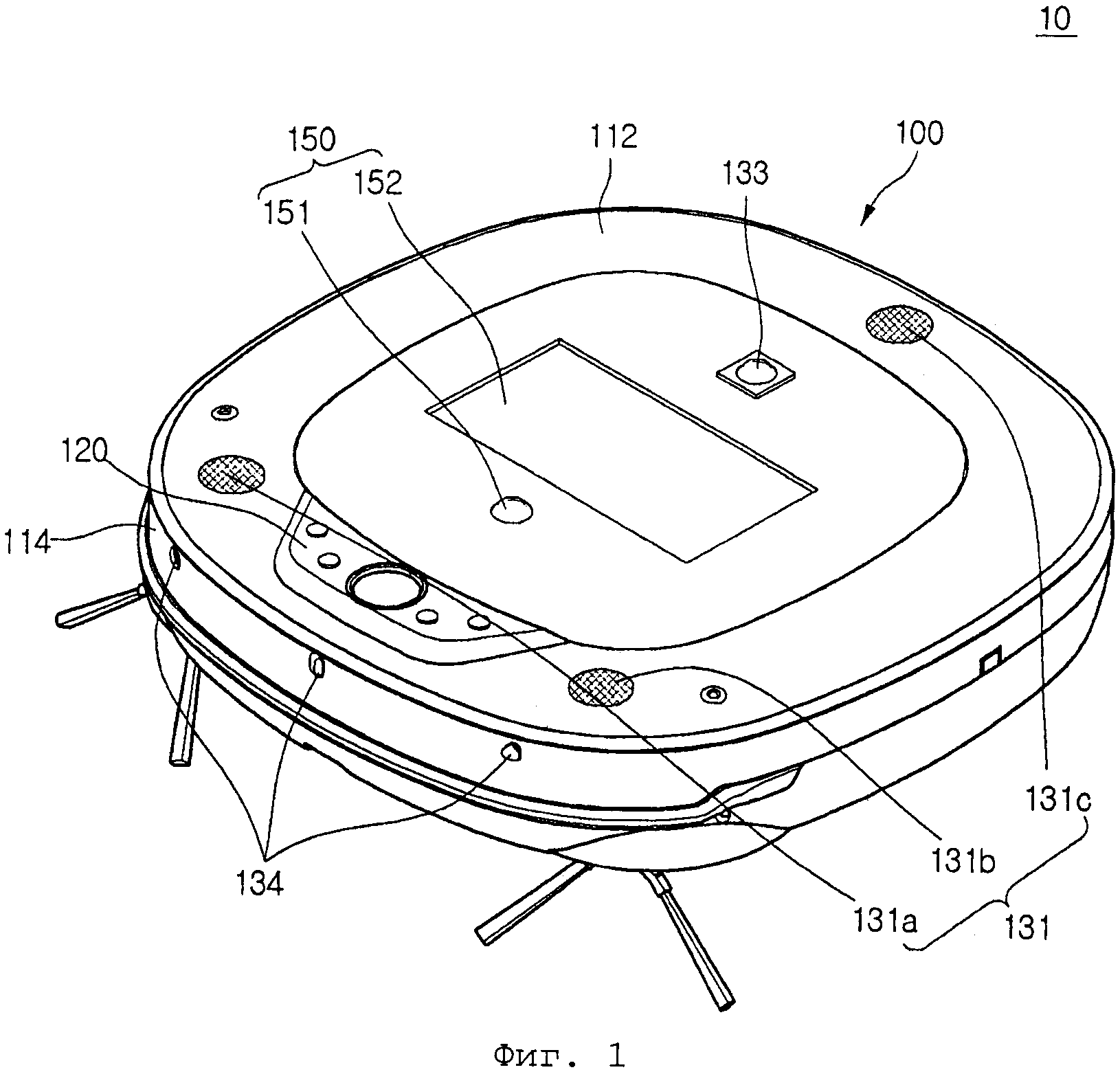
Фиг.1 изображает вид в перспективе робота-пылесоса согласно первому варианту осуществления, а фиг.2 изображает вид снизу робота-пылесоса согласно первому варианту осуществления.
Со ссылкой на фиг.1 и 2, робот-пылесос 10 согласно текущему варианту осуществления может включать в себя основной корпус 100, определяющий его внешний вид, блок 120 ввода для приема предварительно определенной информации, блок 150 вывода для вывода предварительно определенной информации, блок 162 перемещения для перемещения робота-пылесоса 10 и блок 164 чистки для выполнения чистки.
Основной корпус 100 может включать в себя элемент 112 верхней поверхности, составляющий верхнюю часть робота-пылесоса 10, элемент 114 боковой поверхности, составляющий боковую поверхность робота-пылесоса 10, элемент 116 нижней поверхности, составляющий нижнюю часть робота-пылесоса 10.
Блок 120 ввода может быть расположен на элементе 112 верхней поверхности основного корпуса 100, но настоящее раскрытие не ограничивается этим.
Блок 120 ввода может включать в себя кнопку или сенсорную панель. Пользователь может включить и выключить робот-пылесос 10 или выбрать режим чистки или режим перемещения посредством блока 120 ввода.
Основной корпус 100 может включать в себя блок 131 приема для приема голосовой команды, камеру 133 для получения визуальной информации в отношении окружающей среды и датчик 134 обнаружения объектов для обнаружения, есть ли объект.
Блок 131 приема может включать в себя, например, микрофон. Блоки 131 приема могут быть обеспечены во множестве на элементе 112 верхней поверхности основного корпуса 100. Направление, в котором возникает обнаруженная голосовая команда, может быть обнаружено посредством множества блоков 131 приема.
Подробнее, расстояния от источника звука до множества блоков 131 приема могут отличаться друг от друга. Таким образом, промежутки времени, потребовавшиеся для передачи голосовой команды, произошедшей в конкретной точке, к блокам 131 приема, и уровни переданных звуков могут отличаться друг от друга. Направление, в котором возникает голосовая команда, может быть обнаружено посредством различия промежутков времени, за которые обнаруживаются одни и те же голосовые команды, и уровня звука.
Блок 131 приема может включать в себя первый блок 131a приема, второй блок 131b приема и третий блок 131c приема, которые расположены на краю элемента 112 верхней поверхности. Кроме того, первый, второй и третий блоки 131a, 131b и 131c приема расположены на некотором расстоянии друг от друга.
Например, первый, второй и третий блоки 131a, 131b и 131c приема могут быть расположены на одной окружности. Здесь угол между микрофонами может быть приблизительно равен 120° относительно центра соответствующего круга. То есть воображаемая линия, соединяющая первый, второй и третий блоки 131a, 131b и 131c приема друг с другом, может иметь треугольную форму.
Однако текущий вариант осуществления не ограничивается этой позицией и количеством блоков 131 приема.
Направление может быть точно обнаружено посредством большего количества микрофонов. В качестве альтернативы направление может быть обнаружено посредством только двух микрофонов. (Например, как направление звука обнаруживается посредством двух ушей человека. Здесь может быть дополнительно обеспечена структура, такая как ушная раковина, для измерения мутности звука.)
Камера 133 может быть расположена на элементе 112 верхней поверхности основного корпуса 100, но настоящее раскрытие не ограничивается этим.
Камера 133 может быть расположена в направлении верхней или передней стороны для фотографирования окружения робота-пылесоса 10. Когда камеры 133 обеспечены во множестве, камеры 133 могут быть расположены на верхней или боковой поверхностях робота-пылесоса на предварительно определенных расстояниях или углах.
Камера 133 может быть использована как средство для обнаружения позиции. Например, информация, сфотографированная посредством камеры 133, может сравниваться с информацией карты территории, на которой находится робот-пылесос 10, для обнаружения позиции робота-пылесоса 100.
По меньшей мере один датчик 134 обнаружения объектов может быть расположен на элементе 114 боковой поверхности или элементе 116 нижней поверхности основного корпуса 100.
Датчик 134 обнаружения объектов может обнаруживать объект (препятствие) или человека поблизости от робота-пылесоса 10. Датчик 134 обнаружения объектов может обнаруживать, находится ли объект или человек внутри предварительно установленного расстояния. Предварительно установленное расстояние может выбираться согласно тому, имеет ли робот-пылесос 10 возможность легкого перемещения или смены направления. Ультразвуковой датчик, инфракрасный датчик, радиочастотный (RF) датчик и амортизатор могут быть использованы в качестве датчика 134 обнаружения объектов.
Блок 150 вывода может быть расположен в центре элемента 112 верхней поверхности основного корпуса 100, но настоящее раскрытие не ограничивается этим.
Блок 150 вывода может включать в себя динамик 151 для вывода звуков и дисплей 152 для вывода знаков, фигур, картинок или символов. Блок 150 вывода может включать в себя светоизлучающий диод для вывода предварительно определенной информации посредством того, излучается ли свет, цвета света, интервала излучения света или схемы излучения света.
Блок 162 перемещения может включать в себя множество колес. Блок 162 перемещения может быть расположен на центральной части элемента 116 нижней поверхности основного корпуса 100, но настоящее раскрытие не ограничивается этим.
Например, блок 162 перемещения может включать в себя первое колесо 162a, расположенное слева от центра элемента 116 нижней поверхности, и второе колесо 162b, расположенное справа от центра элемента 116 нижней поверхности, если смотреть на фиг.1.
Управление первым и вторым колесами 162a и 162b может осуществляться одновременно или отдельно. Когда управление первым и вторым колесами 162a и 162b осуществляется в одном направлении и на одной скорости, робот-пылесос 10 может перемещаться вперед или назад. Также, когда управление первым и вторым колесами 162a и 162b осуществляется в различных направлениях или на различных скоростях, робот-пылесос 10 может перемещаться, при этом меняя направление. Когда управление первым и вторым колесами 162a и 162b осуществляется в различных направлениях и на одной скорости, робот-пылесос 10 может вращаться на месте. То есть управление первым и вторым колесами 162a и 162b может осуществляться в операции только для смены направления робота-пылесоса 10.
Когда блок 162 перемещения включает в себя два колеса, вспомогательное колесо 163 может быть дополнительно обеспечено на элементе 116 нижней поверхности. Робот-пылесос 10 может равномерно перемещаться посредством двух колес 162a и 162b и вспомогательного колеса 163.
Вспомогательное колесо 163 может автоматически вращаться посредством источника привода или неавтоматически вращаться силой трения с полом, которое происходит при перемещении робота-пылесоса 10.
Хотя каждое из первого и второго колес 162a и 162b обеспечено как колесо, имеющее форму круглой пластины, настоящее раскрытие не ограничивается формой блока 162 перемещения. Например, блок 162 перемещения может иметь колесо, имеющее форму шарика или ремня.
Блок 164 чистки может быть расположен на элементе 116 нижней поверхности основного корпуса 100, но настоящее раскрытие не ограничивается этим.
Блок 164 чистки может включать в себя щетку для подметания пыли, элемент генерирования пара для генерирования пара, элемент распрыскивания для распрыскивания чистящего средства и тряпку для счистки пыли или воды.
Например, блок 164 чистки может включать в себя первую щетку 164a, расположенную на левой верхней части элемента 116 нижней поверхности, и вторую щетку 164b, расположенную на правой верхней части элемента 116 нижней поверхности, если смотреть на фиг.2.
Первая и вторая щетки 164a и 164b могут вращаться двигателем. Первая и вторая щетки 164a и 164b могут вращаться для сметания пыли поблизости от робота-пылесоса 10 к всасывающему отверстию.
Подробнее, если смотреть на фиг.2, первая щетка 164a может вращаться по часовой стрелке, а вторая щетка 164b может вращаться против часовой стрелки. В этом случае первая и вторая щетки 164a и 164b могут сметать пыль поблизости от робота-пылесоса 10 к нижним сторонам первой и второй щеток 164a и 164b.
Когда блок 164 чистки включает в себя щетку, пылевсасывающее отверстие 165 для всасывания пыли, сметенной щеткой, может быть определено в элементе 116 нижней поверхности. Если смотреть на фиг.2, пылевсасывающее отверстие 165 может быть определено на задней стороне центра вращения каждой из первой и второй щеток 164a и 164b. Также пылевсасывающее отверстие 165 может быть расположено на передней стороне центра вращения каждого из первого и второго колес 162a и 162b.
Основной корпус 100 может включать в себя блок 190 зарядки. Блок 190 зарядки робота-пылесоса 10 может быть соединен с терминалом площадки зарядки (см. ссылочную позицию 50 на фиг.7) так, чтобы робот-пылесос 10 принимал мощность от площадки 50 зарядки.
Также для обнаружения того, соединен ли робот-пылесос 10 с площадкой 50 зарядки, блок обнаружения позиции зарядки (не показан) может быть дополнительно обеспечен на основном корпусе 10 или площадке зарядки (не показано). Например, блоком обнаружения позиции зарядки может быть кнопка, имеющая эластичность. Кнопка может быть нажата, когда основной корпус 10 расположен в позиции зарядки. С другой стороны, когда основной корпус 10 выходит из позиции зарядки, кнопка может возвращаться к исходному состоянию. Также, только когда кнопка нажата, мощность может передаваться от площадки 50 зарядки к роботу-пылесосу 10.
Фиг.3 изображает структурную схему робота-пылесоса согласно первому варианту осуществления.
Со ссылкой на фиг.3, робот-пылесос 10 согласно текущему варианту осуществления может включать в себя блок 310 распознавания голоса для распознавания голоса пользователя, блок 320 обнаружения направления для обнаружения направления, в котором возникает голос, блок 330 обнаружения позиции для обнаружения позиции основного корпуса 100, блок 400 связи для связи с удаленным управляющим устройством или другими устройствами, приводной блок 600 для приведения в действие блока 162 перемещения или блока 164 чистки основного корпуса 100, и блок 700 памяти для хранения информации. Блок 120 ввода, датчик 134 обнаружения объектов, блок 190 зарядки, блок 310 распознавания голоса, блок 320 обнаружения направления, блок 330 обнаружения позиции, блок 400 связи, блок 150 вывода, приводной блок 600 и блок 700 памяти могут быть соединены с управляющим блоком 800 для передачи или приема предварительно определенной информации к/от управляющего блока 800.
Блок 310 распознавания голоса может сравнивать голос, введенный посредством блока 131 приема, с информацией, сохраненной в блоке 700 памяти для определения, соответствует ли введенный голос конкретной команде. Если определяется, что введенный голос соответствует конкретной команде, соответствующая команда передается в управляющий блок 800. Если невозможно сравнить обнаруженный голос с информацией, сохраненной в блоке 700 памяти, обнаруженный голос может расцениваться как шум, чтобы проигнорировать обнаруженный голос.
Например, обнаруженный голос соответствует слову "сюда", и существует управляющая команда, соответствующая слову "сюда", в информации, сохраненной в блоке 700 памяти. В этом случае соответствующая команда может передаваться в управляющий блок 800.
Блок 320 обнаружения направления может обнаруживать направление голоса посредством временного различия или уровня голоса, введенного во множество блоков 131 приема. Блок 320 обнаружения направления передает направление обнаруженного голоса управляющему блоку 800. Управляющий блок 800 может определять путь перемещения через направление голоса, обнаруженное блоком 320 обнаружения направления.
Блок 330 обнаружения позиции может обнаруживать координаты основного корпуса 100 внутри предварительно определенной информации карты. Например, информация, обнаруженная камерой 133, и информация карты, сохраненная в блоке 700 памяти, могут сравниваться друг с другом для обнаружения текущей позиции основного корпуса 100. Блок 330 обнаружения позиции может использовать глобальную систему позиционирования (GPS) в дополнение к камере 133.
В широком смысле блок 330 обнаружения позиции может обнаруживать, расположен ли основной корпус 100 в конкретной позиции. Например, блок 330 обнаружения позиции может включать в себя блок для обнаружения, расположен ли основной корпус 100 на площадке 50 зарядки.
Например, в способе для обнаружения, расположен ли основной корпус 100 на площадке 50 зарядки, расположен ли основной корпус 100 в позиции зарядки, может быть обнаружено согласно тому, вводится ли мощность в блок 190 зарядки. В другом примере, расположен ли основной корпус 100 в позиции зарядки, может быть обнаружено блоком обнаружения позиции зарядки, расположенным на основном корпусе 100 или площадке 50 зарядки.
Блок 400 связи может передавать или принимать предварительно определенную информацию в/от удаленное управляющее устройство или другие устройства. Блок 400 связи может обновлять информацию карты робота-пылесоса 10.
Приводной блок 600 может управлять блоком 162 перемещения и блоком 164 чистки. Приводной блок 600 может перемещать блок 162 перемещения по пути перемещения, определенному управляющим блоком 800.
Блок 700 памяти сохраняет предварительно определенную информацию, относящуюся к операции робота-пылесоса 100. Например, информация карты зоны, в которой расположен робот-пылесос 10, информация управляющей команды, соответствующая голосу, распознанному блоком 310 распознавания голоса, информация угла направления, обнаруженная блоком 320 обнаружения направления, информация позиции, обнаруженная блоком 330 обнаружения позиции, и информация препятствий, обнаруженная датчиком 134 обнаружения объектов, может сохраняться в блоке 700 памяти.
Фиг.4 изображает структурную схему робота-пылесоса согласно второму варианту осуществления. Дублируемые описания в отношении элементов, описанных в связи с фиг.3, будут опущены.
Со ссылкой на фиг.4, управляющий блок 800 может принимать информацию, обнаруженную блоком 131 приема, камерой 133 и датчиком 134 обнаружения объектов. Управляющий блок 800 может распознавать пользовательский голос, обнаруживать направление, в котором возникает голос, и обнаруживать позицию робота-пылесоса 10 на основе переданной информации. Также управляющий блок 800 может управлять блоком 162 перемещения и блоком 164 чистки.
То есть хотя блок 310 распознавания голоса, блок 320 обнаружения направления, блок 330 обнаружения позиции и приводной блок 600 отделены от управляющего блока 800 на фиг.3, не обязательно отделять вышеописанные блоки 310, 320, 330 и 600 от управляющего блока 800. Как показано на фиг.4, управляющий блок 800 может выполнять функцию блока 310 распознавания голоса, блока 320 обнаружения направления, блока 330 обнаружения позиции и приводного блока 600.
Фиг.5 изображает блок-схему, иллюстрирующую способ для управления роботом-пылесосом согласно первому варианту осуществления.
Со ссылкой на фиг.5, для управления роботом-пылесосом 10 робот-пылесос 10 включается (8100). Затем робот-пылесос 10 находится в режиме ожидания команды вызова от пользователя (8110).
Когда голос, распознанный блоком 310 распознавания голоса, и информация управляющей команды, сохраненная в блоке 700 памяти, сравниваются друг с другом для определения, что голос соответствует команде вызова (8120), робот-пылесос 10 обнаруживает угол θ направления, в котором возникает голос, посредством блока 320 обнаружения направления.
Затем определяется, есть ли стена в направлении вызова, посредством блока обнаружения стены (8140). Например, когда датчик 134 обнаружения объектов обнаруживает непрерывное препятствие в направлении под углом θ направления, может быть определено, что в направлении вызова есть стена. В другом примере, когда позиция, обнаруженная блоком 330 обнаружения позиции, находится внутри предварительно определенного расстояния и стена расположена в направлении под углом θ направления, может быть определено, что в направлении вызова есть стена.
Когда направление вызова соответствует направлению к стене или направлению, проходящему через стену, выводится информирующее сообщение для информирования о неудаляемости (8150). Информирующее сообщение может передаваться посредством звуков или знаков через динамик 151 или дисплей 152.
Когда есть стена, расположенная под углом θ направления, может предполагаться, что голос вызывающего отражен стеной и затем введен. Таким образом, информирующим сообщением может быть голосовое сообщение, означающее "нет возможности перемещения ввиду эха".
Когда в направлении вызова есть стена, имеет ли основной корпус 100 возможность смены направления в сторону вызова, определяется посредством блока обнаружения (8200).
Например, если основной корпус 100 расположен в позиции зарядки, робот-пылесос 10 может не иметь возможности смены направления. Таким образом, имеет ли основной корпус 100 возможность смены направления, может быть определено согласно тому, расположен ли основной корпус 100, обнаруживаемый блоком 330 обнаружения позиции, в позиции зарядки.
В другом примере, когда основной корпус 100 оказался у препятствия или стены поблизости от него, робот-пылесос 10 может не иметь возможности смены направления согласно внешней форме основного корпуса 100. Таким образом, имеет ли основной корпус 100 возможность смены направления, может быть определено согласно тому, останавливается ли робот-пылесос 10 во время смены направления.
В другом примере, даже хотя робот-пылесос 10 не останавливается, имеет ли основной корпус 100 возможность смены направления, может быть определено согласно тому, есть ли препятствие, мешающее смене направления, во время смены направления. Есть ли препятствие, может быть определено посредством датчика 134 обнаружения объектов.
Когда робот-пылесос 10 не имеет возможности смены направления в сторону вызова, робот-пылесос 10 может перемещаться по обходному пути Pd. Обходной путь Pd робота-пылесоса 10 будет подробно описан со ссылками на Фиг.6-12.
Если основной корпус 100 не меняет направление в сторону вызова, робот-пылесос 10 может менять направление на угол θ направления на месте. Также основной корпус 100 может иметь возможность перемещения по прямолинейному пути PL в направлении вызова.
Когда робот-пылесос 10 перемещается по обходному пути Pd или прямолинейному пути PL, измеряется расстояние L1 перемещения робота-пылесоса 10. Затем, определяется, достигает ли расстояние L1 перемещения предварительно установленного опорного расстояния L0 (8500).
Когда расстояние L1 перемещения достигает опорного расстояния L0, робот-пылесос 10 останавливается (8510), чтобы остановить перемещение в направлении вызова.
Когда расстояние L1 перемещения не достигает опорного расстояния L0, обнаруживается, что есть препятствие (объект или человек) на прямолинейном направлении робота-пылесоса 10 (8520).
Когда робот-пылесос 10 обнаруживает препятствие, распознается, что вызывающий (человек, произносящий команду вызова) находится внутри опорного расстояния L0. Таким образом, робот-пылесос 10 может останавливаться (8510). Кроме того, перемещение робота-пылесоса 10 в направлении вызова заканчивается.
Если вызывающий не обнаружен в направлении перемещения робота-пылесоса 10, процесс возвращается к операции 8500. Операции 8500 и 8520 могут идти не по порядку.
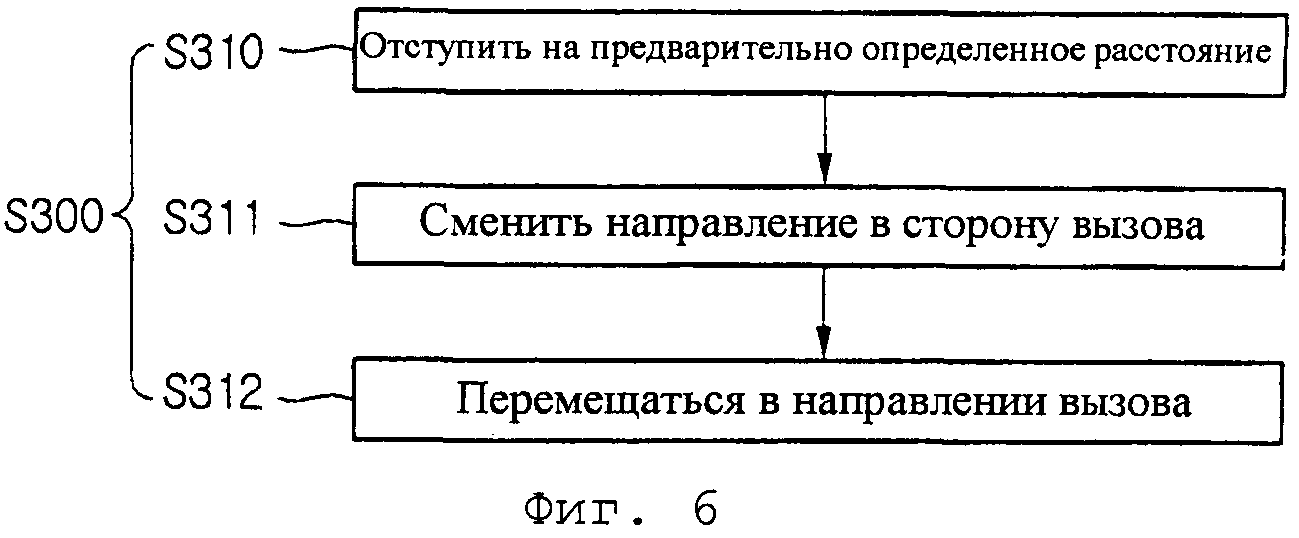
Фиг.6 изображает блок-схему, иллюстрирующую перемещение по обходному пути Pd согласно первому варианту осуществления.
Со ссылкой на фиг.6, процесс перемещения (8300) по обходному пути Pd согласно текущему варианту осуществления может включать в себя процесс (8310), в котором робот-пылесос 10 отступает на предварительно определенное расстояние по первому обходному пути, процесс (8311), в котором робот-пылесос 10 меняет направление в сторону вызова, и процесс (8312), в котором робот-пылесос 10 перемещается в направлении вызова по второму обходному пути.
Фиг.7 изображает вид для объяснения операции перемещения по обходному пути Pd согласно первому варианту осуществления.
Фиг.7 изображает операцию робота-пылесоса 10, когда команда вызова распознается в состоянии, когда робот-пылесос 10 расположен в позиции зарядки.
Подробнее, если возникает команда вызова, робот-пылесос 10 обнаруживает угол θ направления от исходной позиции a0, в которой распознается команда вызова, к позиции s0 вызывающего. Также определяется, имеет ли робот-пылесос 10 возможность перемещения по прямолинейному пути PL от исходной позиции a0 к позиции s0 вызывающего. "Исходная позиция a0" может пониматься как "текущая позиция" в отношении момента времени, в который робот-пылесос 10 распознает команду вызова.
Когда исходная позиция a0 соответствует позиции зарядки, робот-пылесос 10 не имеет возможности смены направления. В этом случае управляющий блок 800 может устанавливать обходной путь Pd посредством расстояния между исходной позицией a0 к позиции s0 вызывающего и угла θ направления. Обходной путь Pd может включать в себя первый обходной путь Pd1, который исходит из позиции зарядки, и второй обходной путь Pd2, по которому робот-пылесос 10 перемещается в направлении вызова.
Сначала робот-пылесос 10 может перемещаться по первому обходному пути Pd1 и, таким образом, выходить из исходной позиции a0. Затем робот-пылесос 10 перемещается к первой позиции a1, в которой робот-пылесос 10 имеет возможность смены направления. Первый обходной путь Pd1 может быть направлением отступания робота-пылесоса 10. Также расстояние отступания может быть предварительно установленным.
Когда робот-пылесос 10 расположен в первой позиции a1, робот-пылесос 10 может менять направление в сторону вызывающего (что далее называется "угол θ1 смены направления") относительно первой позиции a1.
Поскольку команда вызова распознается, когда робот-пылесос 10 расположен в позиции зарядки, управляющий блок 800 может вычислять угол θ1 смены направления посредством расстояния между исходной позицией a0 к вызывающему s0, угла θ направления и расстояния от исходной позиции a0 к первой позиции a1.
Расстояние от исходной позиции a0 к вызывающему s0 может быть определено через информацию, собранную посредством датчика измерения расстояния, такого как камера или ультразвуковой датчик. Если датчик измерения расстояния не обеспечен и, таким образом, расстояние от исходной позиции a0 к вызывающему s0 не определяется, угол θ1 смены направления может быть вычислен путем предположения предварительно определенного расстояния.
Когда смена направления на угол θ1 смены направления завершена, робот-пылесос 10 может перемещаться прямо по второму обходному пути Pd1 и затем перемещаться вплоть до второй позиции a2.
Фиг.8 изображает блок-схему, иллюстрирующую перемещение по обходному пути Pd согласно третьему и четвертому вариантам осуществления.
Со ссылкой на фиг.8, процесс перемещения (8300) по обходному пути Pd согласно третьему варианту осуществления может включать в себя процесс (8320), в котором робот-пылесос 10 отступает на предварительно определенное расстояние по первому обходному пути, процесс (8321), в котором робот-пылесос 10 входит в одну точку на прямолинейном пути PL по второму обходному пути, и процесс (8322), в котором робот-пылесос 10 перемещается в прямолинейный путь PL по третьему обходному пути.
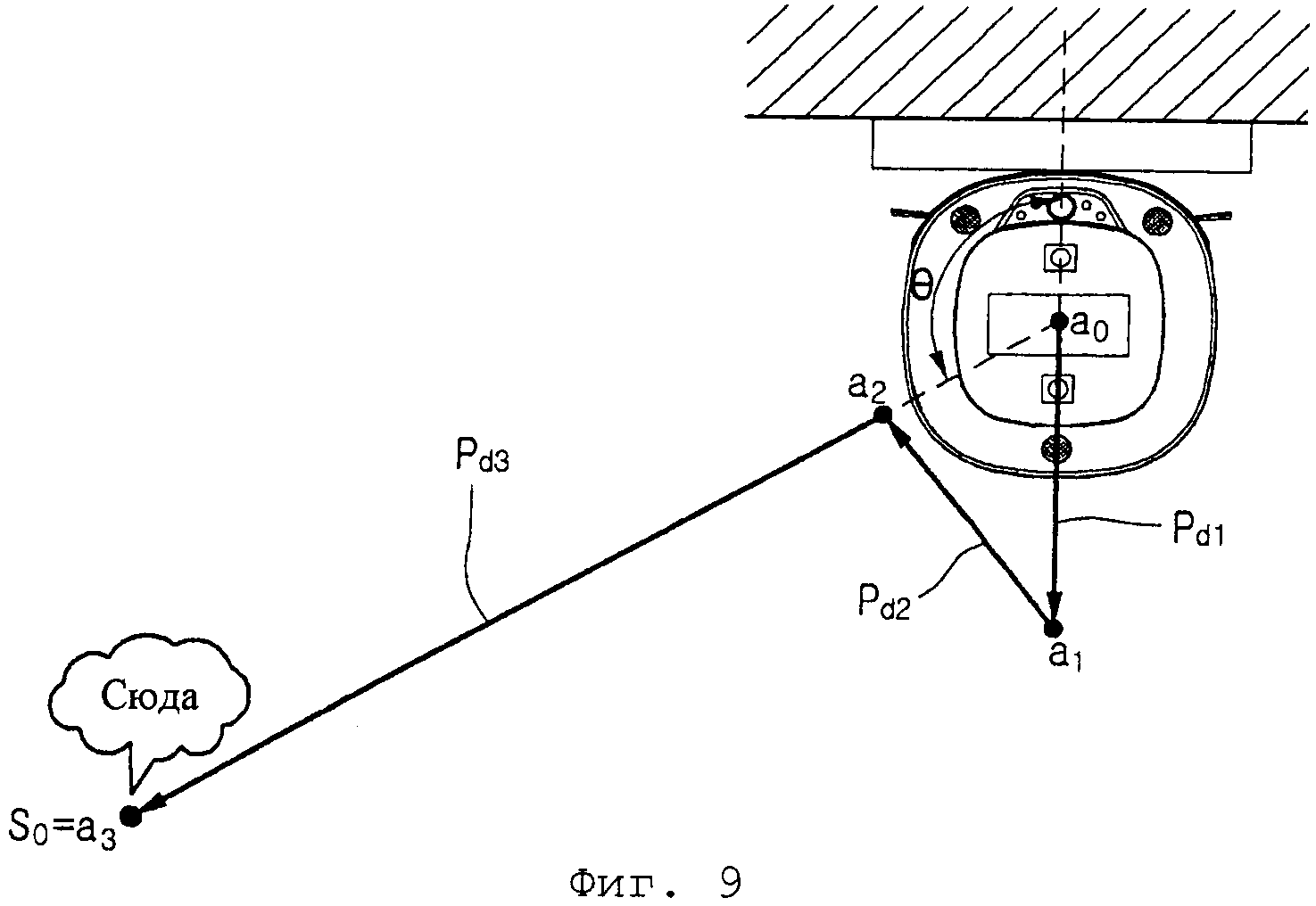
Фиг.9 изображает вид для объяснения операции перемещения по обходному пути Pd согласно третьему варианту осуществления, и фиг.10 изображает вид для объяснения операции перемещения по обходному пути Pd согласно четвертому варианту осуществления. Фиг.9 изображает операцию робота-пылесоса 10, когда команда вызова распознается в состоянии, когда робот-пылесос 10 расположен в позиции зарядки. Дублируемые описания в отношении элементов, описанных в первом варианте осуществления, будут опущены.
Когда исходная позиция a0 робота-пылесоса 10 соответствует позиции зарядки, робот-пылесос 10 не имеет возможности смены направления. В этом случае робот-пылесос 10 перемещается по первому обходному пути Pd1 и, таким образом, выходит из исходной позиции a0. Затем робот-пылесос 10 перемещается к первой позиции a1, в которой робот-пылесос 10 имеет возможность смены направления. Первый обходной путь Pd1 может быть путем, по которому робот-пылесос 10 отступает.
После того, как робот-пылесос 10 располагается в первой позиции a1, робот-пылесос 10 перемещается ко второй позиции a2 по второму обходному пути Pd2. Здесь вторая позиция a2 может быть одной точкой на прямолинейном пути PL.
Второй обходной путь Pd2 может быть прямой линией (первый вариант осуществления) или кривой линией (третий вариант осуществления).
Согласно третьему варианту осуществления второй обходной путь Pd2 может быть прямолинейным путем от первой позиции a1 ко второй позиции a2.
Робот-пылесос 10 вращается на предварительно определенный угол в первой позиции a1 и затем выравнивается так, чтобы передняя сторона робота-пылесоса 10 была направлена ко второй позиции a2. Также, когда робот-пылесос 10 достигает второй позиции a2, робот-пылесос 10 вращается снова на предварительно определенный угол и затем выравнивается в направлении прямолинейного пути PL. Затем робот-пылесос 10 перемещается вперед для достижения третьей позиции a3 по третьему обходному пути pd3.
Согласно четвертому варианту осуществления второй обходной путь Pd2 может быть криволинейным путем от первой позиции a1 ко второй позиции a2. Если первое и второе колеса 162 и 162b регулируются в количестве оборотов на единицу времени (RPM), робот-пылесос 10 может перемещаться по криволинейному пути.
Второй обходной путь Pd2 может быть частью овала, параболы или окружности, касающейся первого обходного пути Pd1 и прямолинейного пути PL.
Например, второй обходной путь Pd2 может быть частью окружности, которая касается первого обходного пути Pd1 и прямолинейного пути PL.
Подробнее, точка c центра окружности, включающей в себя второй обходной путь Pd2, может быть установлена. Здесь ортогональная линия, проведенная из точки c центра к первому обходному пути Pd1, может находиться в первой позиции a1, а ортогональная линия, проведенная из точки c центра к прямолинейному пути PL, может находиться во второй позиции a2.
В этом случае путь возле исходной точки второго обходного пути Pd2 касается первого обходного пути Pd1. В этом случае, когда робот-пылесос 10 начинает с первой позиции a1, направление перемещения робота-пылесоса 10 может совпадать с направлением второго обходного пути Pd2. Таким образом, может не быть необходимым ранее сменить направление робота-пылесоса 10, который начинает с первой позиции a1, и кроме того, робот-пылесос 10 может перемещаться по второму обходному пути Pd2. Подробно, первое и второе колеса 162 и 162b могут регулироваться в количестве оборотов для входа во вторую позицию a2.
Подобным образом, путь возле точки прибытия второго обходного пути Pd2 касается прямолинейного пути PL. В этом случае, когда робот-пылесос 10 входит во вторую позицию a2, направление перемещения робота-пылесоса 10 может совпадать с направлением прямолинейного пути PL. Таким образом, может не быть необходимо ранее сменить направление робота-пылесоса 10, который начинает со второй позиции a2, и кроме того, робот-пылесос 10 может перемещаться по третьему обходному пути Pd3, соответствующему части прямолинейного пути PL.
Фиг.11 изображает блок-схему, иллюстрирующую перемещение по обходному пути (Pd) согласно пятому варианту осуществления.
Со ссылкой на фиг.11, процесс перемещения (8300) по обходному пути Pd согласно пятому варианту осуществления может включать в себя процесс (8330), в котором робот-пылесос 10 перемещается на предварительно определенное расстояние по первому обходному пути, чтобы избежать препятствия, процесс (8331), в котором робот-пылесос 10 меняет направление в сторону вызова, процесс (8332) обнаружения препятствия, мешающего смене направления, процесс (8333) входа в одну точку на прямолинейном пути PL от исходной позиции к вызывающему по второму обходному пути, и процесс (8334), в котором робот-пылесос перемещается в прямолинейный путь PL по третьему обходному пути.
Если на операции 8332 обнаруживается препятствие, мешающее смене направления, процесс возвращается к операции 8330.
Есть ли препятствие, мешающее смене направления, может быть определено путем определения, вращается ли основной корпус 100 на угол θ направления.
Также, есть ли препятствие, мешающее смене направления, может быть определено согласно информации, распознанной датчиком 134 обнаружения объектов для обнаружения препятствия поблизости от основного корпуса 100. В этом случае проверяется, имеет ли робот-пылесос 10 возможность смены направления, прежде чем робот-пылесос 10 меняет направление в фактическую сторону вызова, операция 8331 может опускаться.
Если на операции 8332 не обнаружено препятствие, мешающее смене направления, выполняются операции 8333 и 8334.
Фиг.12 изображает вид для объяснения операции перемещения по обходному пути (Pd) согласно пятому варианту осуществления.
Фиг.12 изображает операцию, когда команда вызова распознается в состоянии, когда робот-пылесос 10 расположен вплотную к стене, у которой сложно сменить направление робота-пылесоса 10.
Со ссылкой на фиг.12, если возникает команда вызова, робот-пылесос 10 обнаруживает угол θ направления от исходной позиции a0, в которой распознается команда вызова, к позиции a0 вызывающего. Также определяется, имеет ли робот-пылесос 10 возможность смены направления на угол θ направления.
Если робот-пылесос 10 не имеет возможности смены направления, робот-пылесос 10 может перемещаться по первому обходному пути Pd1 и, таким образом, выходить из исходной позиции a0. Затем робот-пылесос 10 перемещается к первой позиции a1, в которой робот-пылесос 10 имеет возможность смены направления.
Первый обходной путь Pd1 может быть определен информацией карты, сохраненной в блоке 700 памяти, или информацией карты, переданной блоком 400 связи. Робот-пылесос 10 может устанавливать первую позицию a1, в которой обеспечено достаточное пространство для смены направления, и затем перемещаться к первой позиции a1 по прямолинейному или криволинейному пути на основе информации карты.
Также, первый обходной путь Pd1 может быть путем, по которому робот-пылесос 10 перемещается методом проб и ошибок. То есть первый обходной путь Pd1 может быть путем, по которому робот-пылесос 10 перемещается к первой позиции a1, в которой обеспечено достаточное пространство для смены направления, при этом многократно выходя из текущей позиции.
Процесс, в котором робот-пылесос 10 перемещается от первой позиции a1 ко второй и третьей позициям a2 и a3 тот же, что и процессы на фиг.9 и 10, и поэтому их подробные описания будут опущены.
Когда обнаруживается предварительно установленная голосовая команда, робот-пылесос согласно вариантам осуществления может обнаруживать направление, в котором возникает голосовая команда, и затем перемещаться вплоть до соответствующей позиции. То есть пользователь может вызвать робот-пылесос посредством своего голоса без необходимости в отдельном блоке вызова.
Также, даже хотя робот-пылесос не имеет возможности смены направления, робот-пылесос может устанавливать обходной путь самостоятельно и затем перемещаться к позиции вызова.
Также, если направление вызова не обнаружено или робот-пылесос не имеет возможности перемещения в направлении вызова, может выводиться информирующее сообщение. Таким образом, существует преимущество в том, что недовольство пользователя, происходящее, когда он ошибочно считает робот-пылесос сломанным роботом-пылесосом, может быть устранено.
В роботе-пылесосе согласно вариантам осуществления, когда обнаруживается предварительно установленная голосовая команда, робот-пылесос может обнаруживать направление, в котором возникает голосовая команда, и затем перемещаться к соответствующей позиции. То есть пользователь может вызвать робот-пылесос посредством своего голоса без необходимости в отдельном блоке вызова.
Также, даже хотя робот-пылесос не имеет возможности смены направления, робот-пылесос может устанавливать обходной путь самостоятельно и затем перемещаться к позиции вызова.
Также, если направление вызова не обнаружено или робот-пылесос не имеет возможности перемещения в направлении вызова, может выводиться информирующее сообщение. Таким образом, существует преимущество в том, что недовольство пользователя, происходящее, когда он ошибочно считает робот-пылесос сломанным роботом-пылесосом, может быть устранено.
Несмотря на то, что изобретение было описано со ссылками на некоторое количество его иллюстративных вариантов осуществления, следует понимать, что специалистами в данной области техники может быть разработано множество других модификаций и вариантов осуществления, которые будут находиться в пределах сущности и объема принципов этого раскрытия. В частности, различные вариации и модификации возможны в компонентных частях и/или компоновках рассматриваемых элементов комбинации в пределах объема раскрытия, чертежей и прилагаемой формулы изобретения. В качестве дополнения к вариациям и модификациям в компонентных частях и/или компоновках альтернативные использования также будут очевидны специалистам в данной области техники.
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос
Пылесос и способ управления пылесосом
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос
Пылесос и способ управления пылесосом
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина

