Результат интеллектуальной деятельности: ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ПЫЛЕСОСОМ
Вид РИД
Изобретение
Предпосылки изобретения
Область техники, к которой относится изобретение
Настоящее изобретение относится к пылесосам и, более конкретно, к пылесосу, который определяет относительное положение узла ручки относительно корпуса и изменение относительного положения, чтобы заставить корпус автоматически перемещаться в соответствии с перемещением узла ручки, и способу управления пылесосом.
Описание известного уровня техники
Пылесосом является электрическое устройство для всасывания загрязняющих частиц с очищаемой заданной поверхности вакуумом, создаваемым вакуумным электродвигателем, расположенным в корпусе.
В соответствии с конструкцией пылесоса пылесосы подразделяются на пылесосы вертикального типа и пылесосы контейнерного типа. Пылесос вертикального типа содержит всасывающую насадку и корпус, выполненные как одно целое, пылесос контейнерного типа содержит всасывающую насадку и корпус, соединенные упругим соединительным рукавом.
Пылесос вертикального типа содержит ручку, расположенную на корпусе для очистки очищаемой заданной поверхности при перемещении корпуса.
В противоположность этому пылесос контейнерного типа содержит узел ручки, расположенный на расстоянии от корпуса. Следовательно, если пользователь перемещает узел ручки для регулирования направления перемещения всасывающей насадки, корпус перемещается в направлении перемещения узла ручки, так как корпус, который соединен с узлом ручки при помощи соединительного рукава, перемещается соединительным рукавом.
Таким образом, пылесос контейнерного типа имеет недостаток в том, что перемещение корпуса и всасывающей насадки, как бы пользователь не желал, является обременительным из-за веса корпуса.
Обычно, корпус находится позади пользователя, и, так как существуют случаи, когда пользователь зацепляется за корпус в середине движения назад, пылесос контейнерного типа вызывает неудобство у пользователя.
Краткое описание раскрытия
Следовательно, настоящее изобретение относится к пылесосу и способу управления пылесосом.
Целью настоящего изобретения является создание пылесоса, который содержит корпус, который может перемещаться автоматически в соответствии с манипулированием узла ручки пользователем для повышения удобства пользователя.
Дополнительные преимущества, цели и признаки раскрытия будут частично изложены в нижеследующем описании и частично станут понятны специалистам в данной области техники при изучении нижеследующего описания или при применении на практике настоящего изобретения. Цели и другие преимущества настоящего изобретения могут быть осуществлены и достигнуты за счет конструкции, подробно отмеченной в его письменном описании и формуле изобретения, а также показанной на прилагаемых чертежах.
Для достижения этих целей и других преимуществ и в соответствии с целью настоящего изобретения, как воплощено и широко описано в данном документе, пылесос включает в себя узел ручки, соединенный с всасывающей насадкой, корпус, соединенный с узлом ручки при помощи соединительного рукава, приводное устройство для приведения в движение колес, расположенных на корпусе, передающее устройство и приемное устройство, соответственно, расположенные на узле ручки и корпусе для установления ультразвуковой связи между ними, и устройство управления для управления передающим устройством и приемным устройством, использования данных о расстоянии между передающим устройством и приемным устройством, полученных в результате ультразвуковой связи, при трехстороннем измерении для определения относительного положения и изменения относительного положения, и управления приводным устройством таким образом, что корпус перемещается в соответствии с изменением относительного положения узла ручки.
Приемное устройство включает в себя множество приемных устройств, расположенных на корпусе на расстоянии друг от друга, и, по меньшей мере, одно передающее устройство, расположенное на узле ручки.
Устройство управления умножает скорость ультразвуковой волны, переданной передающим устройством и полученной приемным устройством, на период времени от времени передачи передающего устройства до времени приема приемного устройства для расчета расстояния между передающими устройствами и приемным устройством.
Приемные устройства, расположенные на корпусе, осуществляют связь с передающим устройством одновременно или поочередно.
Передающее устройство включает в себя множество передающих устройств, которое содержит первое передающее устройство и второе передающее устройство, расположенные на расстоянии друг от друга и на обеих сторона фиксатора, расположенного на узле ручки.
Фиксатор закреплен на узле ручки для того, чтобы перемещаться по траектории движения узла ручки, и устройство управления сравнивает относительное положение первого передающего устройства относительно корпуса с относительным положением второго передающего устройства относительно корпуса для определения поворота и направления поворота узла ручки и управляет приводным устройством в соответствии с поворотом и направлением поворота, определенными таким образом.
Пылесос дополнительно включает в себя дополнительное передающее устройство, расположенное на корпусе, для излучения ультразвуковой волны на наружную сторону корпуса, и передающее устройство расположено для приема ультразвуковой волны, излучаемой дополнительным передающим устройством и отражаемой от препятствия на наружной стороне корпуса, и устройство управления определяет положение препятствия вблизи корпуса посредством приема ультразвуковой волны, отраженной от препятствия, и управляет приводным устройством для предотвращения приведения в контакт с препятствием и удара об него.
Устройство управления управляет передающим устройством и дополнительным передающим устройством, чтобы они не излучали ультразвуковые волны одновременно, так что никаких взаимных помех не возникает между ультразвуковой волной передающего устройства и ультразвуковой волной дополнительного передающего устройства.
Устройство управления управляет таким образом, что дополнительное передающее устройство излучает ультразвуковую волну после завершения определения относительного положения узла ручки относительно корпуса в результате ультразвуковой связи между передающим устройством и приемным устройством.
Пылесос дополнительно включает в себя датчик движения, расположенный на узле ручки и соединенный с устройством управления для определения траектории движения узла ручки, и устройство управления управляет приводным устройством в соответствии с информацией о направлении движения или направлении поворота узла ручки, полученными с датчика движения.
Передающее устройство включает в себя множество передающих устройств, расположенных на корпусе на расстоянии друг от друга, и, по меньшей мере, одно приемное устройство, расположенное на узле ручки.
Устройство управления управляет таким образом, что ультразвуковая связь между приемными устройствами и передающим устройством устанавливается последовательно.
Устройство управления управляет приводным устройством для перемещения корпуса к узлу ручки, если расстояние между узлом ручки и корпусом превышает заданный опорный диапазон, и управляет приводным устройством для перемещения корпуса в направлении, противоположном узлу ручки, если расстояние между узлом ручки и корпусом меньше заданного опорного диапазона.
В другом аспекте настоящего изобретения способ управления пылесосом включает в себя этапы осуществления передачи и приема ультразвуковой волны между передающим устройством, расположенным на узле ручки, и приемным устройством, расположенным на корпусе, расчета расстояния между передающим устройством и приемным устройством и определения положения узла ручки, содержащего передающее устройство, расположенное на нем, посредством трехстороннего измерения, определения того, что превышает или нет расстояние между узлом ручки и корпусом заданный опорный диапазон, и управления перемещением корпуса, если расстояние между узлом ручки и корпусом превышает заданный опорный диапазон.
Способ дополнительно включает в себя этапы определения того, что повернут или нет узел ручки с расположенным на нем передающим устройством посредством расчета расстояния между передающим устройством и приемным устройством и трехстороннего измерения, определения направления поворота и степени поворота узла ручки, если определено, что узел ручки повернут, и перемещения корпуса в соответствии с направлением поворота и степенью поворота узла ручки.
Следует понимать, что как вышеизложенное общее описание, так и нижеследующее подробное описание настоящего изобретения являются примерными и объяснительными и предназначены для обеспечения дальнейшего объяснения настоящего изобретения, как заявлено.
Краткое описание чертежей
Сопроводительные чертежи, которые включены для обеспечения дальнейшего понимания настоящего раскрытия и составляют часть настоящей заявки, иллюстрируют вариант (варианты) настоящего раскрытия и вместе с описанием служат для объяснения принципа настоящего раскрытия. На чертежах:
фиг.1 - перспективный вид пылесоса контейнерного типа в соответствии с первым предпочтительным вариантом осуществления настоящего изобретения;
фиг.2A и 2B - схемы, соответственно, показывающие принцип трехстороннего измерения;
фиг.3 - блок-схема управления устройства управления настоящего изобретения;
фиг.4 - блок-схема управления в соответствии с первым предпочтительным вариантом осуществления настоящего изобретения;
фиг.5 - блок-схема управления в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения;
фиг.6 - перспективный вид пылесоса контейнерного типа в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения;
фиг.7 - блок-схема управления в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения;
фиг.8 - блок-схема управления в соответствии с четвертым предпочтительным вариантом осуществления настоящего изобретения;
фиг.9a и 9b - схематичные виды, соответственно, показывающие перемещение корпуса пылесоса в соответствии с перемещением пользователя в настоящем изобретении;
фиг.10 - блок-схема управления в соответствии с пятым предпочтительным вариантом осуществления настоящего изобретения;
фиг.11 - вид сбоку, показывающий перемещение корпуса назад и вперед;
фиг.12 и 13 - схема последовательности операций, показывающая этапы способа управления пылесосом в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Описание конкретных вариантов осуществления
Будет подробно сделана ссылка на конкретные варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на сопроводительных чертежах. Где возможно, подобные ссылочные позиции будут использованы на чертежах для обозначения подобных элементов.
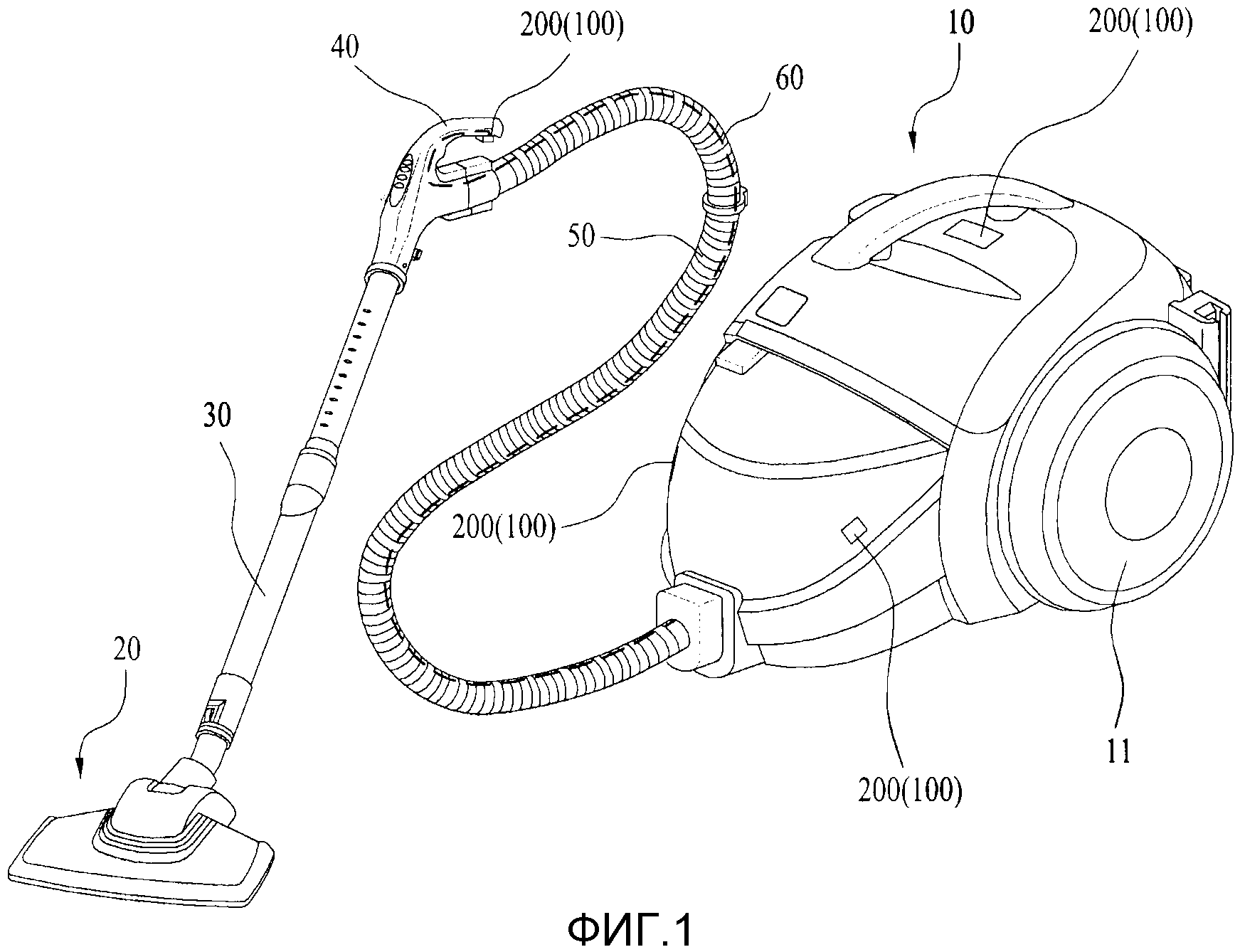
Ссылаясь на фиг.1, пылесос включает в себя корпус 10, всасывающую насадку 20, раздвижную трубку 30, соединенную с всасывающей насадкой 20, чтобы изменять длину, узел 40 ручки на одной стороне раздвижной трубки 30, и соединительный рукав 50, соединенный между узлом 40 ручки и корпусом 10.
Узел 40 ручки предусмотрен для удержания пользователем.
Корпус 10 и узел 40 ручки содержат передающее устройство 100 и приемное устройство 200, установленные, соответственно, на них для связи друг с другом посредством ультразвуковой волны.
Если передающее устройство 100 установлено на корпусе 10, тогда приемное устройство установлено на узле 40 ручки и наоборот.
Корпус 10 содержит устройство управления (не показано), расположенное в нем, для управления излучением ультразвуковой волны с передающего устройства 100 и приемом ультразвуковой волны приемным устройством 200.
Электрический кабель 60 проходит внутри соединительного рукава 50 и соединен между внутренней частью корпуса 10 и узлом 40 ручки. Электрический кабель 60 соединяет устройство управления (не показано) с передающим устройством 100 или приемным устройством 200, установленным на узле 40 ручки.
Передающее устройство 100 или приемное устройство 200 на корпусе 10 также соединено с устройством управления (не показано) для выполнения рабочей команды устройства управления.
Колеса 11 установлены на обеих сторонах внутренней части корпуса 10 для перемещения корпуса, при этом колеса 11 соединены с приводным устройством (не показано), таким как электродвигатель, в корпусе, и приводное устройство (не показано) соединено с устройством управления (не показано) для приведения в движение колес 11 под управлением устройства управления для перемещения корпуса 100.
В этом случае, хотя, предпочтительно, чтобы, если приемное устройство 200 или передающее устройство 100 установлено на корпусе 10, два колеса 11 были расположены на передней стороне корпуса 10, и одно колесо 11 было расположено на задней стороне корпуса, расположение колес не ограничивается этим.
Приемное устройство 200 или передающее устройство 100, расположенное на корпусе 10, таким образом, устанавливает ультразвуковую связь с передающим устройством 100 или приемным устройством 200, расположенным на узле 40 ручки.
Если передающее устройство 100 на узле 40 ручки передает ультразвуковую волну по направлению к приемному устройству 200 (или, если передающее устройство 100 на корпусе 10 передает ультразвуковую волну по направлению к приемному устройству 200 на узле 40 ручки), расстояние между передающим устройством 100 и приемным устройством 200 рассчитывается на основании достигнутого расстояния и периода времени ультразвуковой волны, и данные о расстоянии используются для трехстороннего измерения для определения положения узла 40 ручки относительно корпуса.
В этом случае период времени достижения ультразвуковой волны рассчитывается от момента времени излучения ультразвуковой волны передающим устройством 100 до начального момента времени приема ультразвуковой волны приемным устройством 200.
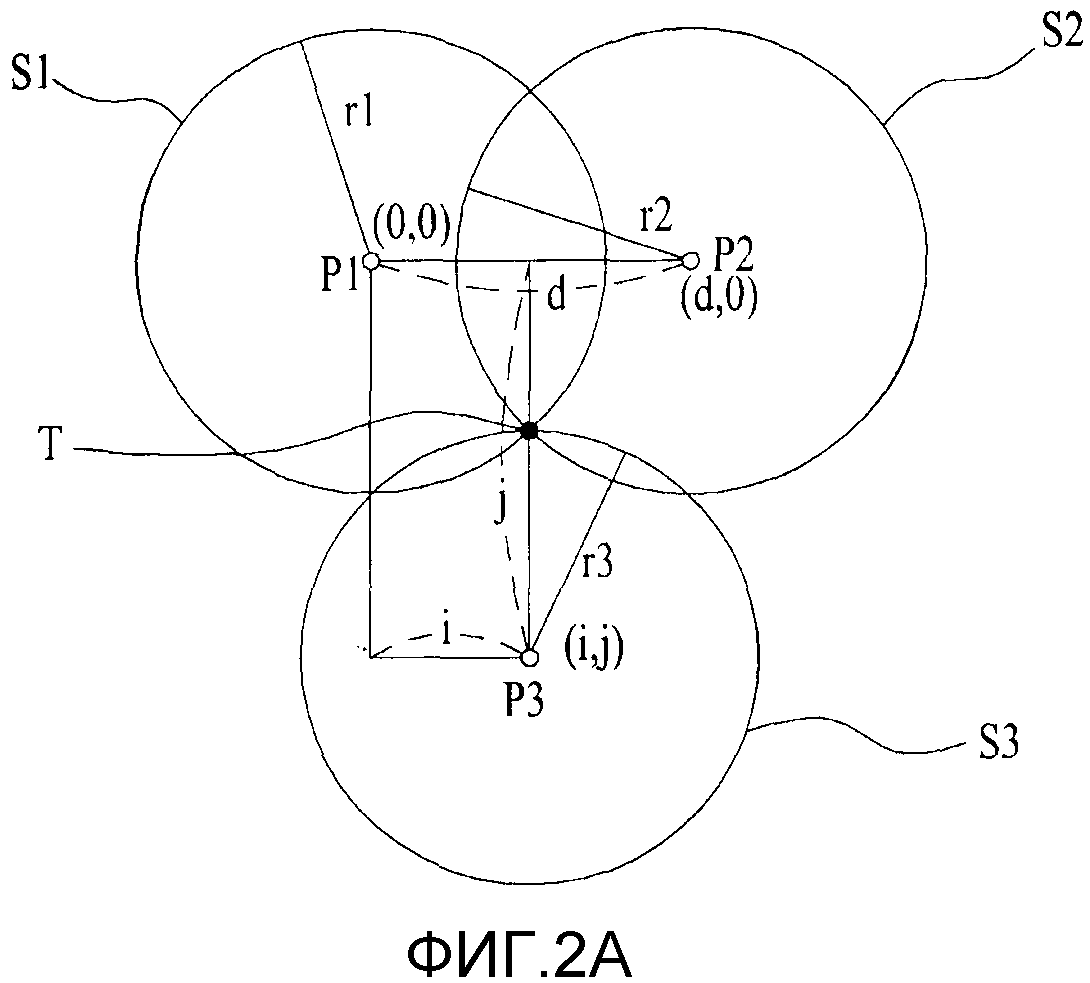
Основные принципы трехстороннего измерения будут описаны со ссылкой на фиг.2A.
Трехсторонним измерением является способ получения относительного положения объекта посредством использования треугольной формы. Для получения положения объекта посредством трехстороннего измерения используются две или более двух опорных точек и расстояния до опорных точек от объекта.
Только для точного и однократного определения относительного положения в двух измерениях посредством трехстороннего измерения требуются, по меньшей мере, три опорные точки.
Если нужно получить относительное положение точки T от опорных точек P1, P2 и P3, сначала получают расстояние r1 от P1 до T, расстояние r2 от P2 до T и расстояние r3 от P3 до T.
Тогда точка T становится точкой пересечения сферы S1 с радиусом r1, сферы S2 с радиусом r2 и сферы S3 с радиусом r3. Затем, определяются координаты положения точки T на оси X, оси Y и оси Z, как указано ниже.
Уравнение 1
r1 2=x2+y2+z2
r2 2=(x-d)2+y2+z2
r3 2=(x-i)2+(y-j)2+z2
x=
y=
z=±
Где x, y и z - координаты, соответственно, на оси X, оси Y и оси Z, d - расстояние между P1 и P2 на оси X, i - расстояние между P1 и P3 на оси X, и J - расстояние между P1 и P3 на оси Y. В этом примере ось Z имеет только положительное значение.
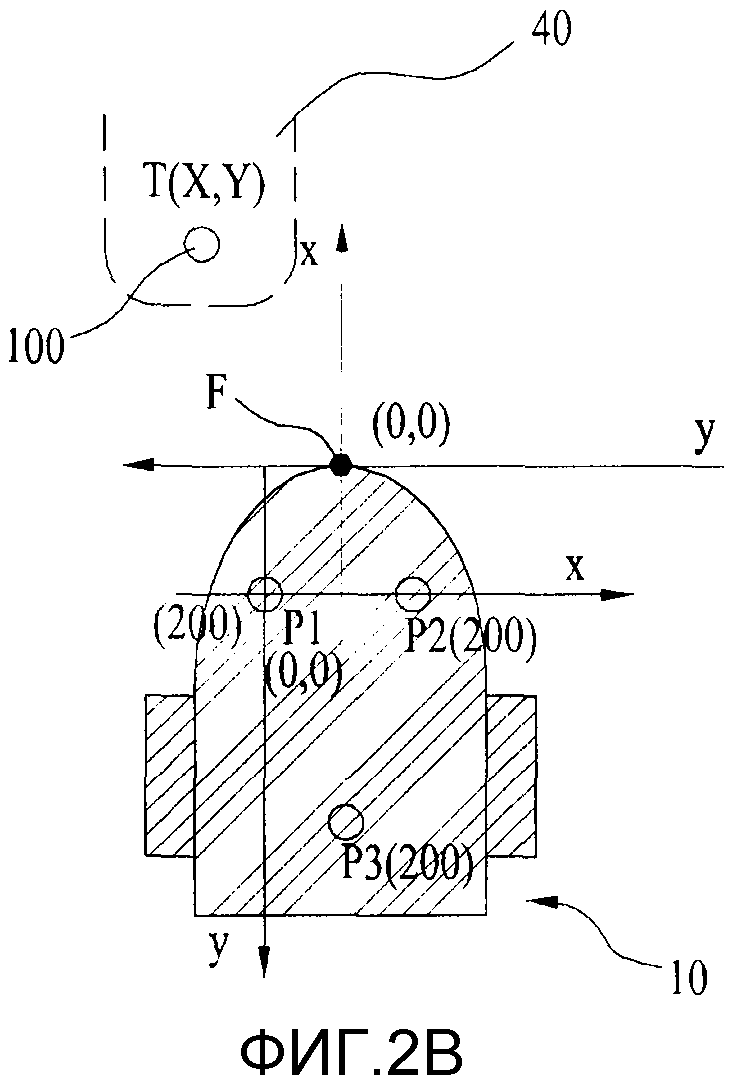
Фиг.2B - схематичный вид, изображающий восприятие положения узла 40 ручки посредством использования данных о расстоянии, полученных на основании ультразвуковой связи между передающим устройством 100 на узле 40 ручки и приемным устройством 200 на корпусе, в трехстороннем измерении в пылесосе настоящего изобретения.
Хотя трехстороннее измерение описано со ссылкой на случай, в котором передающее устройство 100 установлено на узле 40 ручки, а приемное устройство 200 установлено на корпусе 10 на фиг.2B, установочные положения могут быть поменяны местами.
В этом случае положениями приемных устройств 200 на корпусе 10 являются опорные точки P1, P2 и P3, положением передающего устройства 100 на узле 40 ручки является точка T.
Посредством расчета и восприятия расстояний (скорости достижения/периоды времени достижения) между P1, P2 и P3 и посредством использования трехстороннего измерения, может быть получено точное положение точки T.
При получении положения точки T посредством использования трехстороннего измерения выполняется процесс, в котором положение точки T преобразуется в положение в системе координат корпуса 10, в которой передний конец корпуса взят в качестве опорного исходного положения F.
В этом случае, так как все точки опорного исходного положения F P1~P3 и положение точки T известны, легко преобразовать положение точки T, полученной посредством трехстороннего измерения, в положение в системе координат корпуса 10.
В соответствии с этим фиксируется относительное положение и расстояние точки T, т.е. узла 40 ручки, относительно опорного исходного положения F в системе координат корпуса 10.
В этом случае наиболее важными являются относительные положения узла 40 ручки на оси X и оси Y системы координат корпуса, так как они являются важными параметрами для расчета направления вращения, степени поворота и расстояния между узлом 40 ручки корпусом 10.
То есть посредством определения изменения положения точки T в системе координат корпуса 10 и сравнения предыдущего положения точки T с данным положением точки T можно знать изменение положения узла 40 ручки и расстояние между узлом 40 ручки и корпусом 10.
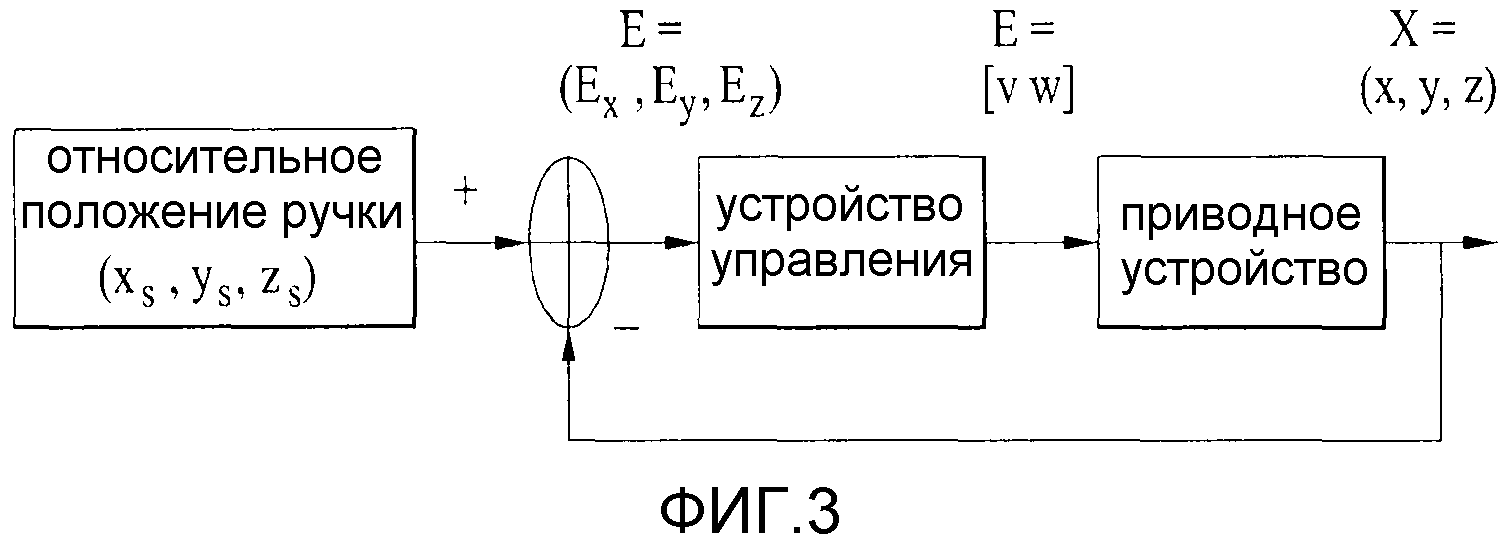
Фиг.3 - блок-схема устройства 300 управления, используемого в пылесосе настоящего изобретения, в которой устройство 300 управления имеет разность E (Ex, Ey, Ez) в качестве входных данных, которая является разностью между положениями (Xs, Ys, Zs) опорной точки, т.е. относительным положением корпуса относительно узла ручки, в котором предполагается нахождение корпуса, и действительными относительными положениями (X, Y, Z) корпуса, и линейную скорость V, угловую скорость W (или скорости двух колес), с которыми корпус должен перемещаться, в качестве выходных данных.
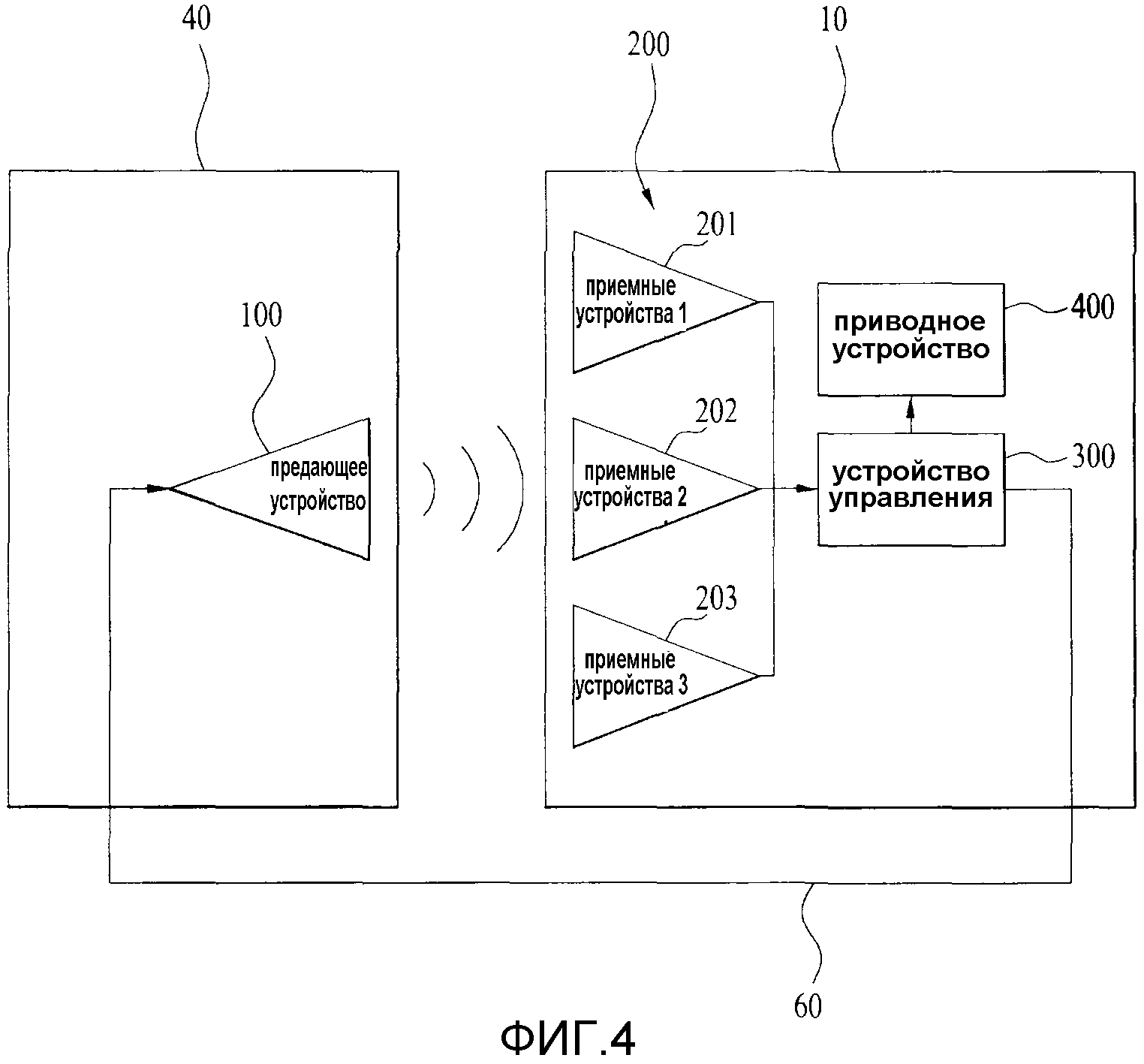
Фиг.4 - блок-схема управления в соответствии с первым предпочтительным вариантом осуществления настоящего изобретения.
Первый вариант осуществления включает в себя одно передающее устройство 100, установленное на узле 40 ручки, и три приемных устройства 200, установленных на корпусе. Передающее устройство 100 и приемные устройства 200 соединены с устройством 300 управления.
Приемные устройства 200 соединены с устройством 300 управления при помощи кабелей, проходящих через внутреннюю часть корпуса 10, и передающее устройство 100 соединено с устройством 300 управления при помощи кабеля 60, проходящего через внутреннюю часть соединительного рукава.
В соответствии с командой устройства 300 управления передающее устройство 100 излучает ультразвуковую волну по направлению к приемным устройствам 200, и ультразвуковая волна, излученная таким образом, принимается приемными устройствами 200.
Предпочтительно, чтобы приемные устройства 200 осуществляли связь с передающим устройством 100 под управлением устройства 300 управления одновременно или поочередно.
Так как скорость ультразвуковой волны составляет около 340 м/сек и посредством умножения скорости на периоды времени, за которые ультразвуковая волна проходит, соответственно, от передающего устройства 100 до приемных устройств 200, могут быть получены расстояния, соответственно, между передающим устройством 100 и приемными устройствами 200.
Посредством использования расстояний между передающим устройством 100 и приемными устройствами 200 и данных о расстоянии между приемными устройствами 200 при трехстороннем измерении, рассчитывается положение передающего устройства, и посредством использования положения передающего устройства 100 в системе координат корпуса может быть рассчитано относительное положение передающего устройства 100 относительно опорной точки (передняя точка корпуса) системы координат корпуса.
Так как передающее устройство 100 установлено на узле 40 ручки, расстояние между узлом 40 ручки и корпусом 10 может быть получено посредством вышеупомянутого способа.
При этом устройство 300 управления соединено с приводным устройством 400, причем приводным устройством 400 является элемент, подобный приводному электродвигателю, соединенный с колесами 11 (см. фиг.1) для перемещения корпуса 10.
Следовательно, если расстояние между узлом 40 ручки и корпусом 10 не является соответствующим, устройство 300 управления управляет приводным устройством 400 для вращения колес 11, чтобы заставить корпус 10 перемещаться ближе к узлу 40 ручки или располагаться на большем расстоянии от узла 40 ручки.
Если положение узла 40 ручки перемещается в направлениях влево/вправо или поворачивается, устройство 300 управления определяет изменение положения передающего устройства 100 и управляет приводным устройством 400 и колесами 11, соответственно, чтобы заставить корпус 10 поворачиваться или перемещаться в направлениях влево/вправо в соответствии с траекторией движения узла 40 ручки.
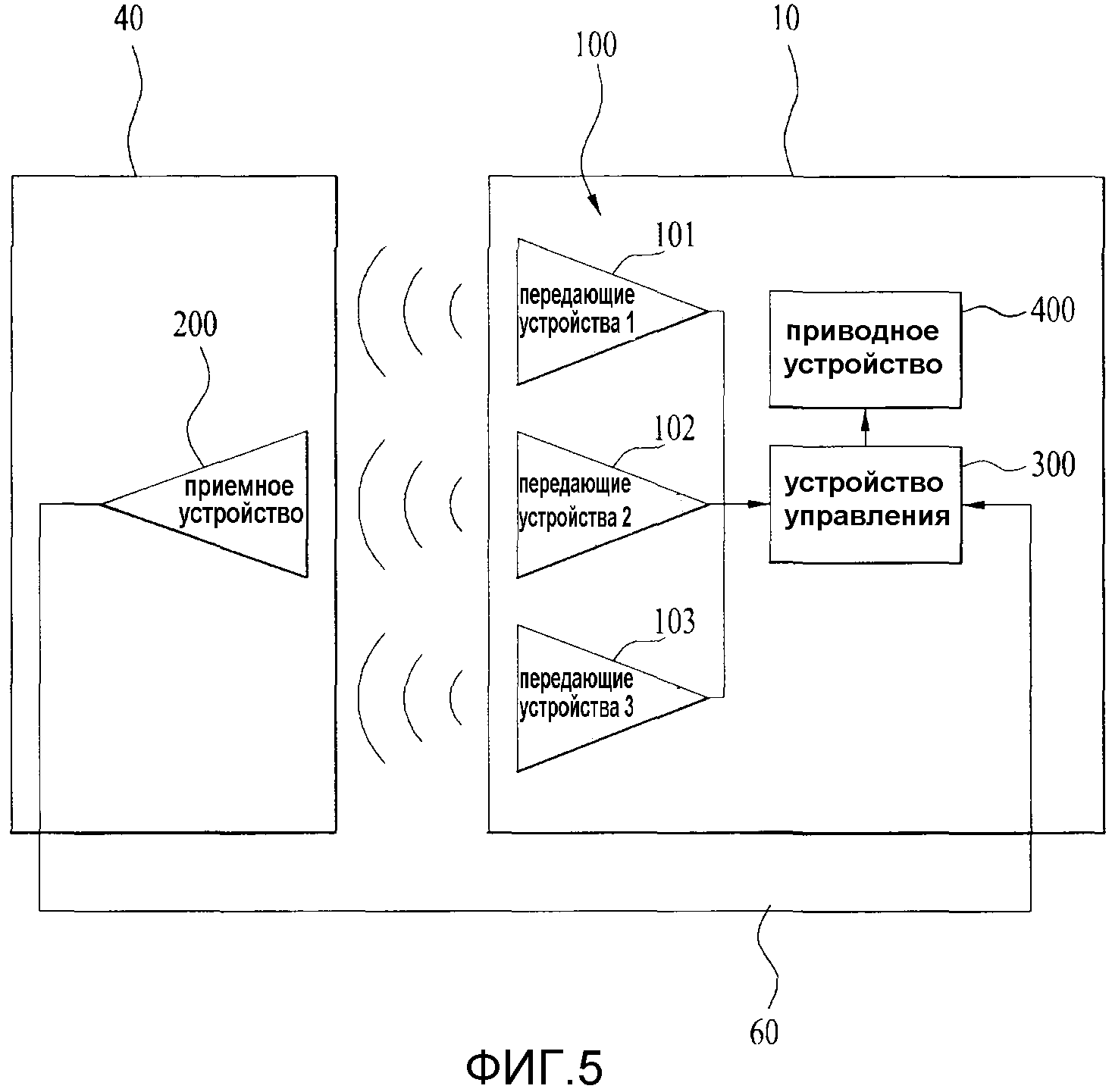
Фиг.5 - блок-схема управления в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения.
Второй вариант осуществления отличается от первого варианта осуществления тем, что приемное устройство 200 установлено на узле 40 ручки, и множество передающих устройств 100 установлено на корпусе 10, в то время как остальные части идентичны первому варианту осуществления.
В этом примере, в случае, когда расположено три передающих устройства 100, если предположить, что три передающих устройства 100 называются как первое передающее устройство 101, второе передающее устройство 102 и третье передающее устройство 103, посредством использования данных о расстоянии между первым-третьим передающими устройствами 101~103 и приемным устройством 200 и данных о расстоянии между передающими устройствами при трехстороннем измерении, может быть определено положение приемного устройства 200 на узле 40 ручки и, затем, посредством использования положения приемного устройства 200 в системе координат корпуса, могут быть рассчитаны относительное положение и расстояние приемного устройства 200 относительно опорного исходного положения системы координат корпуса 10.
В результате, могут быть определены расстояние между узлом 40 ручки и корпусом 10 и относительное положение, и на основании этого подобно первому варианту осуществления посредством приведения в действие приводного устройства 400 и колес 11 (см. фиг.1) под управлением устройства 300 управления, могут выполняться регулировка расстояния между корпусом 10 и узлом 40 ручки и поворот корпуса 10.
То есть, в сравнении с первым вариантом осуществления за исключением того, что только изменены положения и количество передающих устройств 100 и узел 40 ручки, управление перемещением корпуса 10 по отношению к относительному положению, расстояние и направление поворота между узлом 40 ручки и передающими устройствами 100 идентичны.
При этом подобно второму варианту осуществления, если количество передающих устройств 100 больше приемных устройств 200, и если передающие устройства 100 излучают ультразвуковые волны по направлению к приемному устройству 200 одновременно, могут возникнуть помехи при приеме сигналов.
Следовательно, необходимо, чтобы связь между передающими устройствами 100 и приемным устройством 200 устанавливалась последовательно.
Подробно, если первое передающее устройство 101 передает ультразвуковую волну, приемное устройство 200 принимает ультразвуковую волну, и устройство 300 управления рассчитывает расстояние между первым передающим устройством 101 и приемным устройством 200.
Затем, если второе передающее устройство 102 передает ультразвуковую волну, приемное устройство 200 принимает ультразвуковую волну, и устройство 300 управления рассчитывает расстояние между вторым передающим устройством 102 и приемным устройством 200.
Затем, если третье передающее устройство 103 передает ультразвуковую волну, приемное устройство 200 принимает ультразвуковую волну, и устройство 300 управления рассчитывает расстояние между третьим передающим устройством 103 и приемным устройством 200.
Затем, посредством использования данных о расстояниях между первым~третьим передающими устройствами 101~103, которые уже известны, и данных о расстояниях между передающими устройствами 100: 101~103 и приемным устройством 200 при трехстороннем измерении, может быть определено положение узла 40 ручки, на которой находится приемное устройство 200.
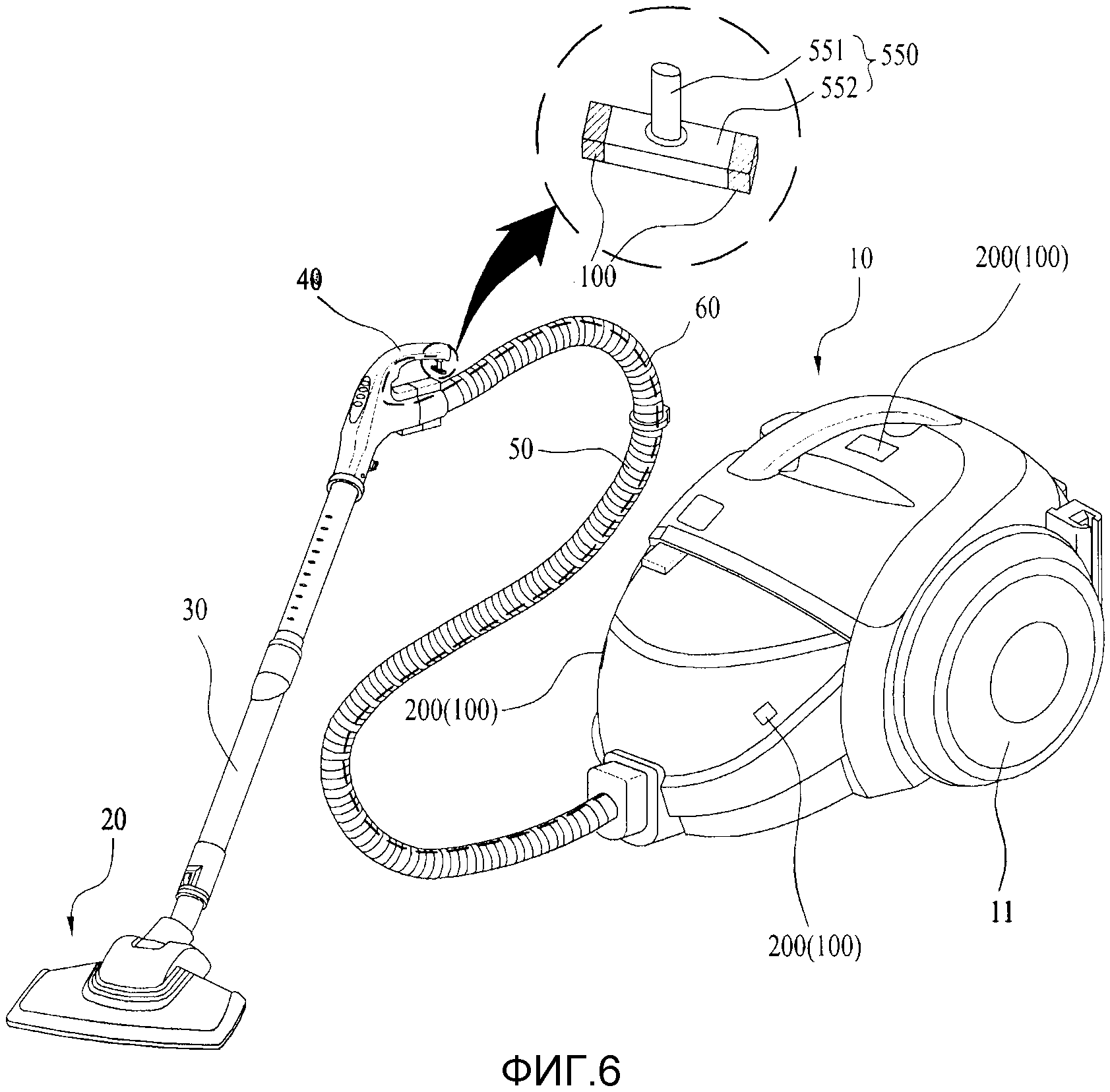
Фиг.6 - перспективный вид пылесоса контейнерного типа в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения.
Пылесос третьего предпочтительного варианта осуществления отличается от пылесоса первого предпочтительного варианта осуществления тем, что хотя пылесос первого варианта осуществления содержит одно передающее устройство 100, установленное на узле 40 ручки, пылесос третьего варианта осуществления содержит два передающих устройства 100, установленных на узле 40 ручки. За исключением вышеупомянутого пылесосы первого и третьего вариантов осуществления являются идентичными.
Узел 40 ручки содержит фиксатор 550, закрепленный на нем, и передающие устройства 100 установлены на обеих сторонах фиксатора 550 на расстоянии друг от друга. Два передающих устройства 100 устанавливают ультразвуковую связь, соответственно, с множеством приемных устройств 200 на корпусе 10.
Фиксатор 550 включает в себя первый фиксатор 551, который является выступающей частью от узла 40 ручки, и второй фиксатор 552, который является выступающей частью от конца первого фиксатора 551 на обеих сторонах для установки, соответственно, передающих устройств 100.
В соответствии с этим положения передающих устройств 100 рассчитываются посредством трехстороннего измерения, и относительное положение и расстояние до корпуса 10 может также быть рассчитано.
В этом состоянии, если пользователь поворачивает узел 40 ручки, направление поворота и степень поворота узла 40 ручки могут быть определены, исходя из изменения положения каждого из передающих устройств 100.
Причина состоит в том, что поскольку фиксатор 550 закреплен на узле 40 ручки, делая траекторию движения узла 40 ручки и траекторию движения фиксатора 550 идентичными, соответственно, траектория движения каждого из передающих устройств 100 также соответствует траектории движения узла 40 ручки.
На основании этого устройство 300 управления (см. фиг.7) определяет направление вращения и степень поворота корпуса 10 и в соответствии с этим перемещает корпус 10.
Однако положения передающих устройств 100 и приемных устройств 200 взаимозаменяемы.
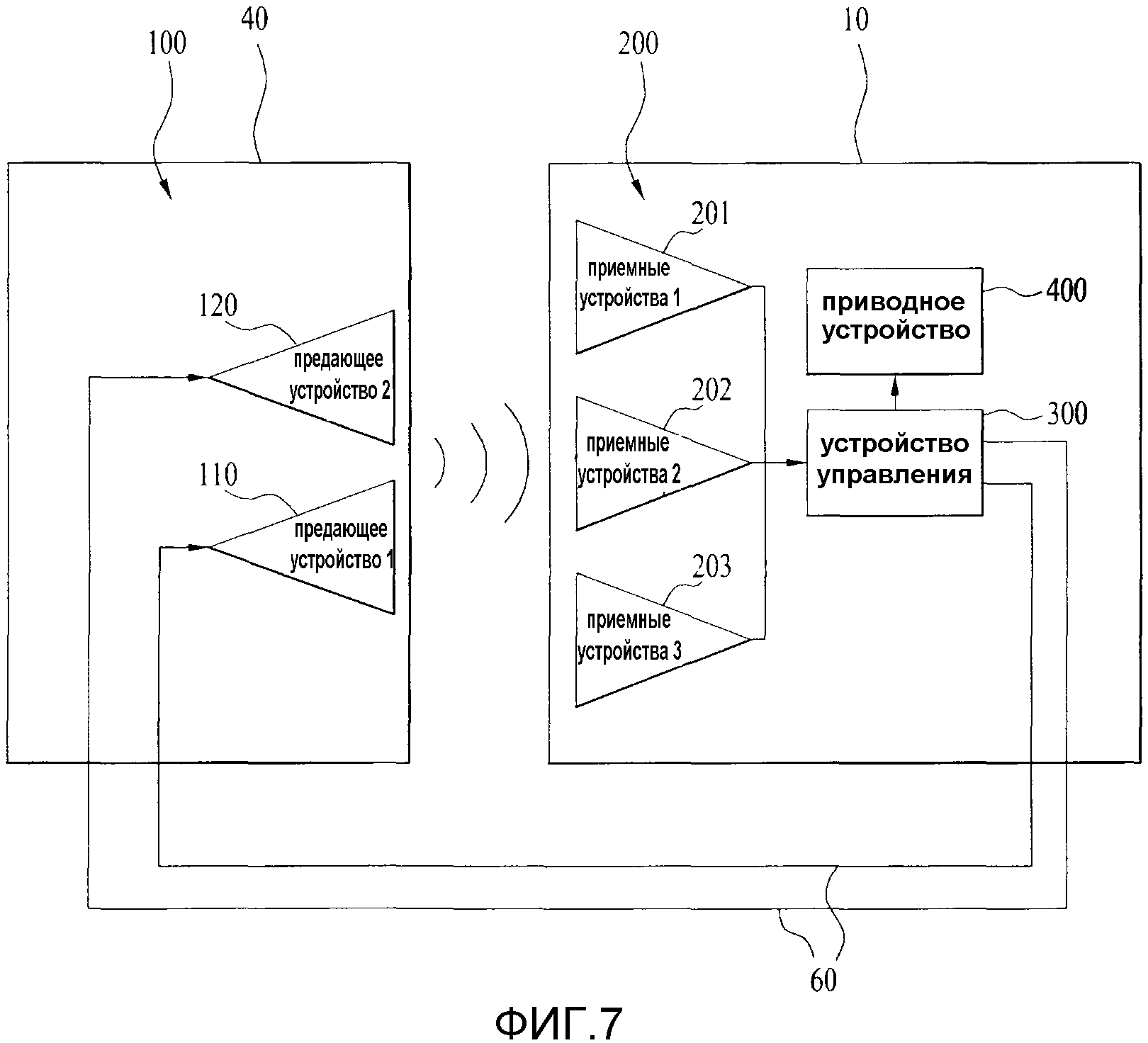
Фиг.7 - блок-схема управления в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения.
Как описано выше, узел 40 ручки содержит первое передающее устройство 110 и второе передающее устройство 120, установленные на нем, и корпус 10 содержит множество приемных устройств 200, расположенных на нем. Если установлено три приемных устройства 200, установлены первое приемное устройство 201, второе приемное устройство 202 и третье приемное устройство 203.
Первое и второе передающие устройства 110 и 120 и устройство 300 управления соединены при помощи электрических кабелей 60, проходящих внутри соединительного рукава, и первый-третий приемные устройства 201-203 и устройство 300 управления соединены при помощи электрических кабелей в корпусе 10.
В этом случае для предотвращения связи от помех друг с другом, сначала устанавливается ультразвуковая связь между первым передающим устройством 110 и первым-третьим приемными устройствами 201~203, и рассчитываются расстояния между первым передающим устройством 110 и первым-третьим приемными устройствами 200.
Затем, устанавливается ультразвуковая связь между вторым передающим устройством 120 и первым-третьим приемными устройствами 201~203, и рассчитываются расстояния между вторым передающим устройством 120 и первым-третьим приемными устройствами 200.
Устройство 300 управления обеспечивает выполнение такого этапа, использует данные о расстоянии при трехстороннем измерении для определения положений первого передающего устройства 110 и второго передающего устройства 120, определяет перемещение узла 40 ручки на основании изменений положений первого и второго передающих устройств 110 и 120 и управляет перемещением корпуса 10 в соответствии с определенным таким образом перемещением.
Однако изменения положений и количеств передающих устройств 100 и приемных устройств 200 также входят в объем настоящего изобретения.
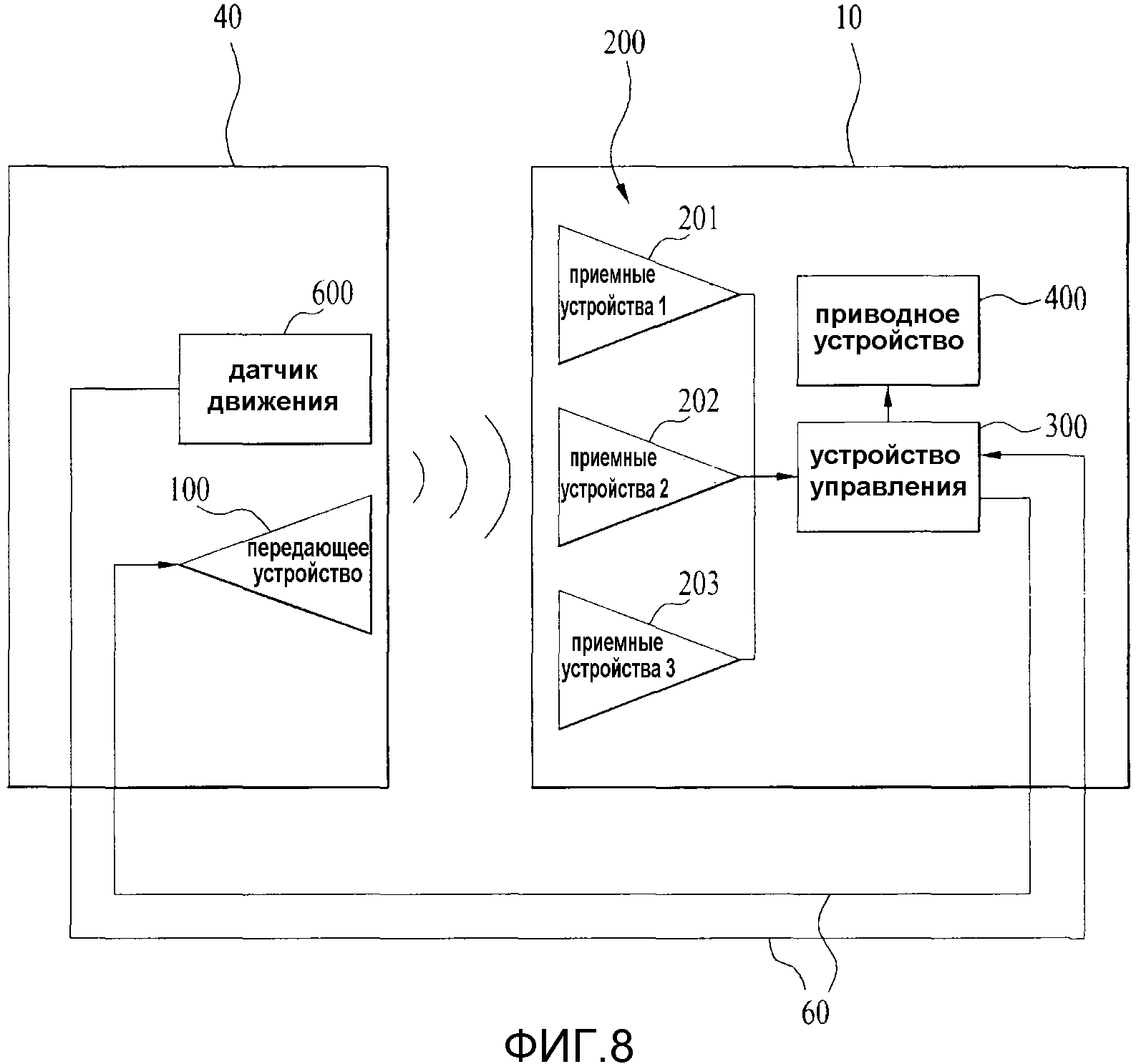
Фиг.8 - блок-схема управления в соответствии с четвертым предпочтительным вариантом осуществления настоящего изобретения.
Пылесос четвертого предпочтительного варианта осуществления отличается от пылесоса первого предпочтительного варианта осуществления тем, что пылесос четвертого варианта осуществления содержит датчик 600 движения, установленный на узле 40 ручки для точного определения поворота узла 40 ручки.
Датчиком 600 движения является датчик, используемый в сотовом телефоне и ему подобном для определения изменения положения, обусловленного перемещением объекта (сотовый телефон).
Так как датчик 600 движения соединен с устройством 300 управления при помощи электрического кабеля 60, проходящего через соединительный рукав, направление поворота и степень поворота узла 40 ручки, определяемые датчиком 600 движения, передаются в устройство 300 управления и используются в качестве основных данных для управления корпусом 10.
При этом четвертый вариант осуществления также включает в себя узел 40 ручки с передающим устройством 100, установленным на нем, и корпус 10 с первым-третьим приемными устройствами 200: 201~203, установленными на нем. Описание ультразвуковой связи между вышеупомянутым передающим устройством 100 и приемными устройствами 200, расчет расстояния и расчет положения, которые уже выполнены, будут опущены.
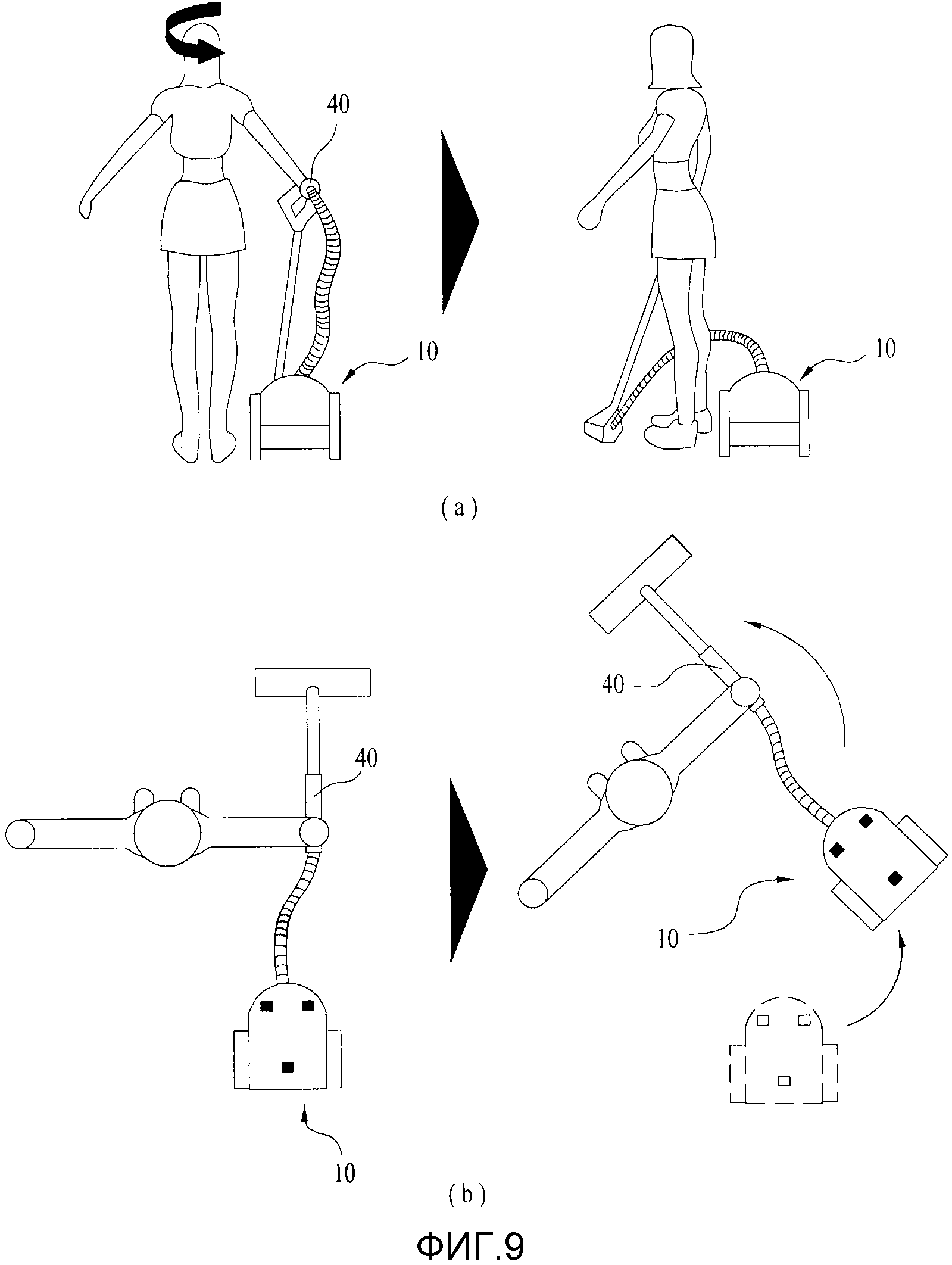
Фиг.9a и 9b - схематичные виды, показывающие изменения положения корпуса 10 в соответствии с поворотом узла 40 ручки в третьем или четвертом варианте осуществления, соответственно.
Определение поворота узла 40 ручки, исходя из изменения положений двух передающих устройств 100, установленных на фиксаторе 500 (см. фиг.6), может выполняться в третьем варианте осуществления, или определение поворота узла 40 ручки на основании датчика 600 движения (см. фиг.7), установленного на узле 40 ручки, может выполняться в четвертом варианте осуществления.
Обычно, если узел 40 ручки совершает большой поворот, в большинстве случаев пользователь обращен к направлению вращения узла 40 ручки.
То есть, подобно состоянию на левой стороне на фиг.9a или состоянию на левой стороне на фиг.9b, если узел 40 ручки перемещается при заданном диапазоне передней области корпуса 10, корпус 10 становится обращенным в направлении вперед, и в этом случае пользователь также будет обращен в направлении вперед.
При этом подобно состоянию на правой стороне на фиг.9a, если пользователь поворачивается в левом направлении для изменения, соответственно, положения узла 40 ручки, корпус 10 также будет перемещаться в этом направлении.
Следовательно, подобно состоянию на правой стороне на фиг.9b устройство 300 управления управляет корпусом 10 для перемещения, принимая во внимание направление поворота и степень поворота узла 40 ручки и относительное расстояние до узла ручки.
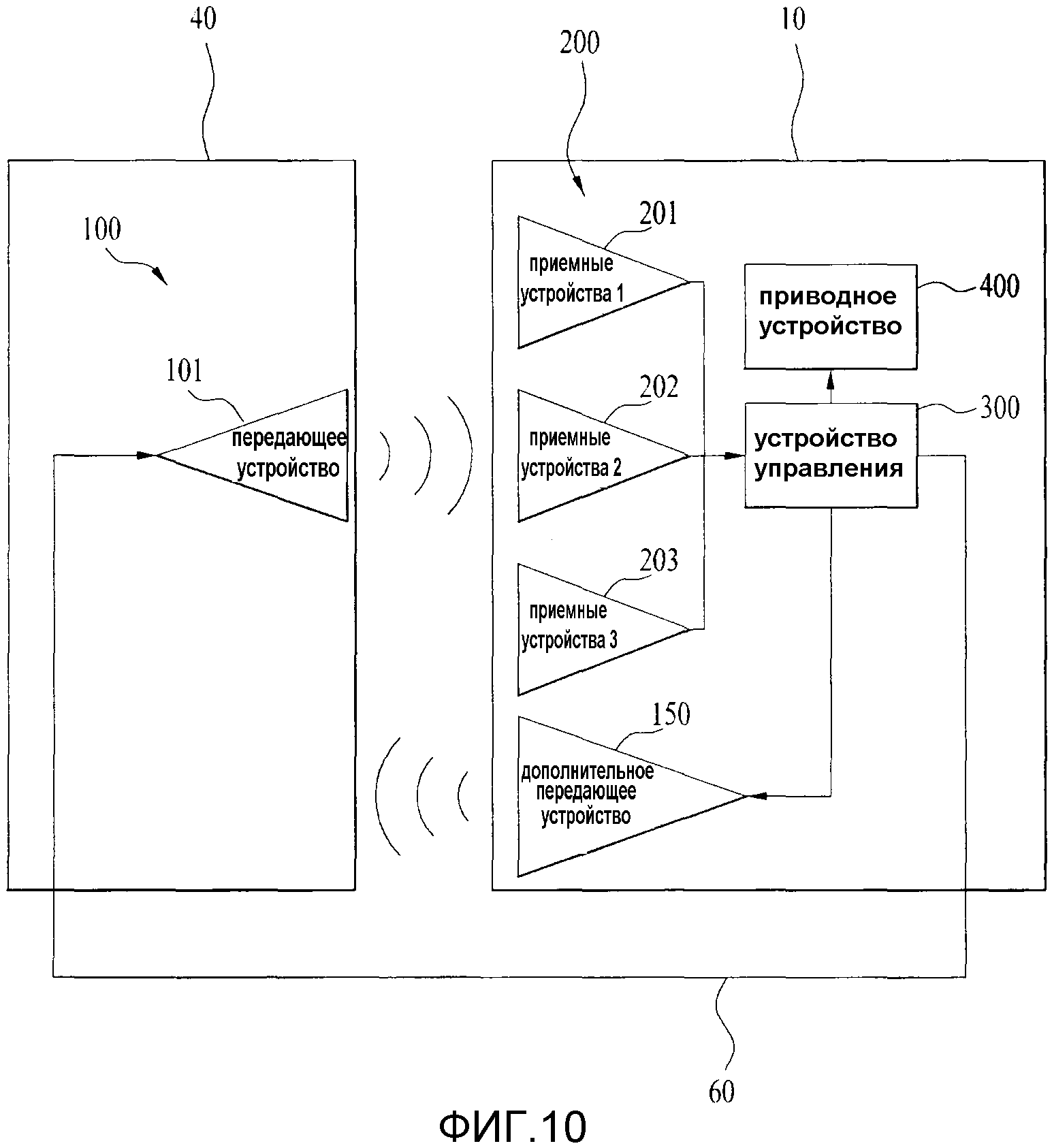
Фиг.10 - блок-схема управления в соответствии с пятым предпочтительным вариантом осуществления настоящего изобретения.
В этом случае пылесос пятого варианта осуществления отличается от пылесоса первого варианта осуществления тем, что пылесос пятого варианта осуществления содержит дополнительное передающее устройство 150, установленное на корпусе 10.
Дополнительное передающее устройство 150 соединено с устройством 300 управления для излучения ультразвуковой волны на наружную сторону корпуса 10 под управлением устройства 300 управления.
Дополнительное передающее устройство 150 используется для излучения ультразвуковой волны для определения положения корпуса 10 и измерения расстояния от корпуса 10 до препятствия вблизи корпуса 10.
Следовательно, ультразвуковая волна дополнительного передающего устройства 150 принимается приемным устройством 200, расположенным на корпусе 10, после отражения ультразвуковой волны от препятствия вблизи корпуса 10.
Это подобно механизму, в котором летучая мышь изучает ультразвуковую волну и принимает отраженную ультразвуковую волну для восприятия препятствия вблизи летучей мыши, и определяет расстояние до препятствия.
Следовательно, если приемное устройство 200 принимает ультразвуковую волну, отраженную таким образом, устройство 300 управления определяет наличие и положение препятствия вблизи корпуса 10 и измеряет расстояние между препятствием и корпусом 10.
Таким образом, если устройство 300 управления определяет препятствие, измеряет расстояние между препятствием и корпусом 10 и определяет, что расстояние между препятствием и корпусом 10 находится в пределах предварительно заданного расстояния, устройство 300 управления приводит в действие приводное устройство 400 и колеса 11 (см. фиг.1) для расположения корпуса 10 на заданном расстоянии от препятствия.
Таким образом, можно предотвратить корпус 10 от приведения в контакт и удара с препятствием.
При этом необходимо предотвратить помехи между связями передающих устройств 100 с приемными устройствами 200 и дополнительного передающего устройства 150 с приемными устройствами 200.
Следовательно, сначала, передающее устройство 100 излучает ультразвуковую волну, приемное устройство 200 принимает ультразвуковую волну, и устройство 300 управления определяет расстояние между передающим устройством 100 и приемным устройством 200 и использует расстояние при трехстороннем измерении для расчета положения узла 40 ручки, содержащего передающее устройство 100, расположенное на нем.
После завершения передачи ультразвуковой волны передающим устройством 100 дополнительное передающее устройство 150 излучает ультразвуковую волну вблизи корпуса 10, и часть ультразвуковой волны, излученной таким образом, принимается приемным устройством 200 после отражения ультразвуковой волны от препятствия вблизи корпуса 10.
В результате, посредством определения положения и расстояния до корпуса 10 при помощи ультразвуковой волны, отраженной таким образом, устройство 300 управления регулирует положение корпуса 10.
Вышеописанные этапы повторяются для расчета положения узла 40 ручки и положения препятствия.
Как показано на фиг.11, если пользователь держит узел 40 ручки и выполняет очистку, устанавливается связь между передающим устройством 100 (или приемным устройством 200), установленным на узле 40 ручки, и приемным устройством 200 (или передающим устройством 100), установленным на корпусе 10.
В соответствии с этим измеряется расстояние между передающим устройством 100 и приемным устройством 200, на основании данных о расстоянии рассчитываются расстояние между узлом 40 ручки и корпусом 10 и положение узла 40 ручки посредством трехстороннего измерения.
Следовательно, если расстояние между корпусом 10 и узлом 40 ручки больше заданного опорного расстояния D в данный момент, корпус 10 перемещается к узлу 40 ручки для установки расстояния между корпусом 10 и узлом 40 ручки равным заданному опорному расстоянию.
Если расстояние между корпусом 10 и узлом 40 ручки меньше заданного опорного расстояния D, корпус 10 перемещается в направлении, противоположном узлу 40 ручки, для установки расстояния между корпусом 10 и узлом 40 ручки равным заданному опорному расстоянию.
Фиг. 12 и 13 - схема последовательности операций, показывающая этапы способа управления пылесосом в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Сначала, передающее устройство излучает ультразвуковую волну (S1201). Затем, приемное устройство принимает ультразвуковую волну с передающего устройства (S1202).
После приема ультразвуковой волны скорость ультразвуковой волны умножается на полученный период времени.
В соответствии с этим измеряется расстояние между приемным устройством и передающим устройством, и измеренное таким образом расстояние используется при трехстороннем измерении для расчета положения передающего устройства или приемного устройства на ручке для получения положения узла ручки (S1203).
Посредством использования положения узла ручки, полученного таким образом в системе координат корпуса, относительное положение узла ручки, исходя из опорного исходного положения системы координат корпуса, и расстояние между узлом ручки и корпусом могут быть установлены.
Когда расстояние узла ручки до корпуса установлено таким образом, определяется, превышает или нет расстояние между узлом ручки и корпусом заданное опорное расстояние (S1204).
В результате определения, если расстояние превышает заданный опорный диапазон, указывая, что расстояние между узлом ручки и корпусом является слишком большим, для уменьшения расстояния устройство управления перемещает корпус в направлении узла ручки (S1205).
Между тем, если расстояние не превышает, но и не достигает заданного опорного диапазона, указывая на то, что корпус находится слишком близко к узлу ручки, так что пользователь может зацепиться с корпусом, устройство управления перемещает корпус в направлении, противоположном узлу ручки (S1206).
Между тем, если расстояние между узлом ручки и корпусом находится в пределах заданного опорного диапазона, данное состояние поддерживается (S1207).
При этом после перемещения корпуса снова определяется, находится или нет расстояние между узлом ручки и корпусом в пределах заданного опорного диапазона (S1208), и если да, корпус останавливается (S1209).
Поворот узла ручки может быть известен посредством определения датчика движения, или посредством сравнения положений передающего устройства или приемного устройства на узле ручки перед и после поворота.
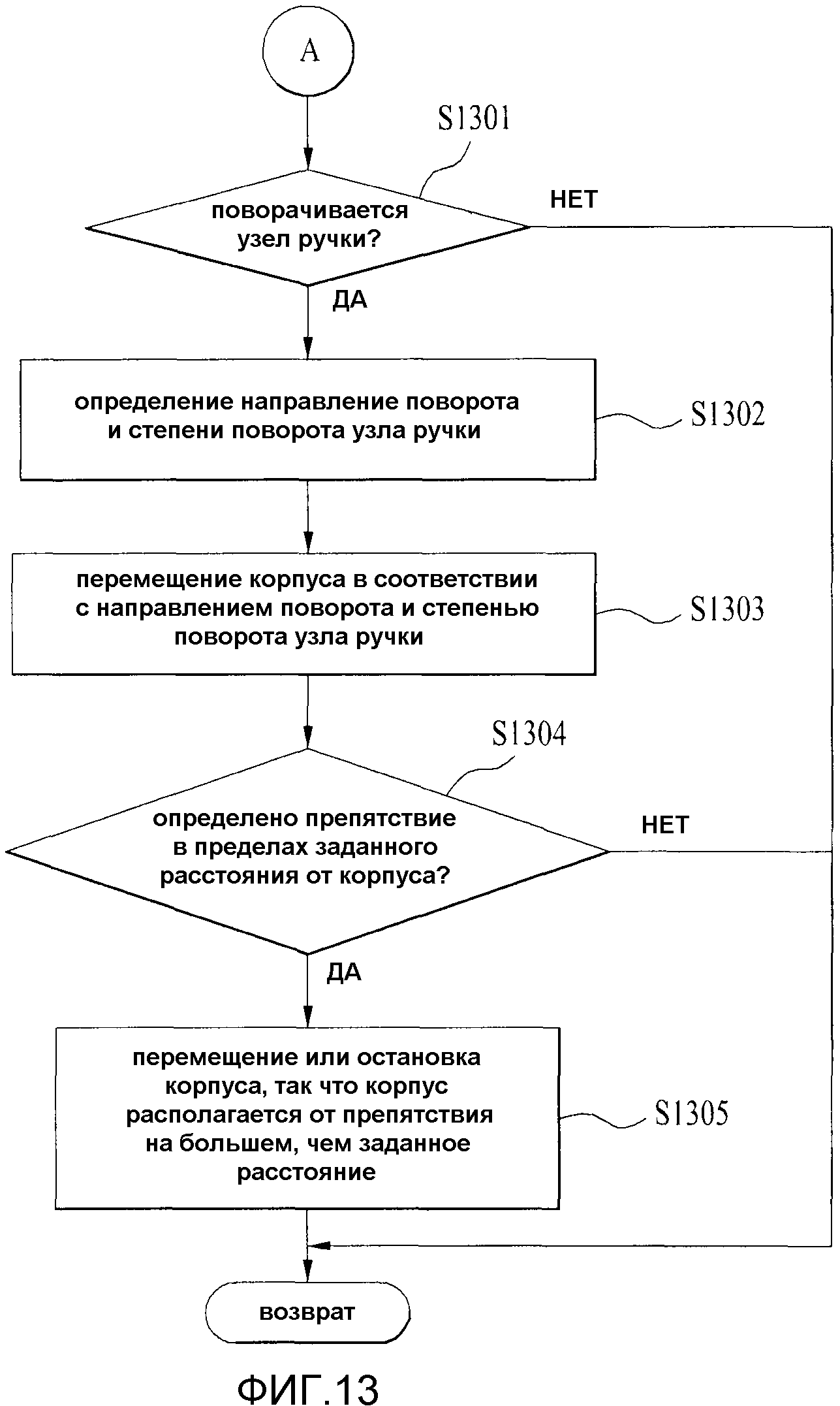
Следовательно, определяется, повернут или нет узел ручки (S1301), если повернут, устройство управления определяет направление поворота и степень поворота узла ручки (S1302) и перемещает корпус в соответствии с направлением вращения и степенью поворота узла ручки (S1303).
Между тем, как описано выше, определяется, находится или нет препятствие в пределах заданного расстояния от корпуса посредством ультразвуковой связи между дополнительным передающим устройством и приемным устройством (S1304).
В соответствии с этим, если определено, что препятствие находится в пределах заданного расстояния от корпуса, устройство управления перемещает корпус на расстояние от препятствия, большее заданного расстояния.
Если препятствие расположено на большем расстоянии от корпуса, чем заданное расстояние, устройство управления останавливает корпус (S1305).
Даже если фиг. 12 и 13 иллюстрируют, что перемещение корпуса, следующего движению назад и вперед узла ручки, перемещение корпуса, следующего повороту узла ручки, и перемещение корпуса, вызванного препятствием, выполняются при помощи одного способа, перемещение корпуса в каждой из ситуаций может выполняться независимо.
Как было описано, пылесос и способ управления пылесосом настоящего изобретения имеют следующие преимущества.
Так как корпус перемещается автоматически, следуя перемещению узла ручки, если пользователь перемещает узел ручки, пользователю не нужно тянуть корпус, прилагая усилие.
Так как корпус перемещается автоматически, если пользователь перемещается назад, у пользователя не будет неприятностей с зацеплением с корпусом.
Кроме того, так как пылесос делает легким определение положения препятствия и определяет расстояние от корпуса до препятствия и обходит препятствие, повреждение корпуса, вызванное ударом о препятствие, может быть предотвращено.
Кроме того, так как пылесос определяет направление поворота узла ручки и поворачивает корпус, даже если пользователь не поворачивает корпус, удобство пользователя повышается.
Специалисты в данной области техники должны понимать, что возможны модификации и изменения в настоящем изобретении без отхода от сущности или объема настоящего изобретения. Таким образом, подразумевается, что настоящее изобретение включает в себя модификации и изменения настоящего изобретения при условии, что они входят в объем прилагаемой формулы изобретения и ее эквивалентов.
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина
Стиральная машина и способ стирки
Способ кодирования и декодирования аудиосигнала и устройство для его осуществления
Способ для передачи и приема сигналов с использованием многополосных радиочастот
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи и приема управляющей информации в системе беспроводной связи
Бытовое устройство и система бытового устройства
Пылесос
Способ и устройство, предназначенные для поддержки услуги csg в беспроводной системе связи
Способ передачи обслуживания и передачи информации базовой станции в системе беспроводной связи
Способ стирки и стиральная машина
Стиральная машина и способ стирки

