Результат интеллектуальной деятельности: УСТРОЙСТВО ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА И СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБОПРОВОДА ПО РЕЗУЛЬТАТАМ ДВУХ И БОЛЕЕ ИНСПЕКЦИОННЫХ ПРОПУСКОВ ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для определения положения трубопровода в пространстве и в том числе в горизонтальной и вертикальной плоскостях при эксплуатации и строительстве трубопроводов.
Известно устройство для измерения пространственного положения трубопроводов (патент №1809297 A1 (RU) от 15.04.1993), содержащее платформу с размещенными на ней датчиками угла наклона в горизонтальной и вертикальной плоскостях, датчик пройденного расстояния, оснащенное с целью повышения точности и производительности измерений корпусом. На корпусе установлены эластичные манжеты для базирования устройства в трубопроводе. Датчик угла наклона выполнен в виде гировертикали, а датчик наклона в горизонтальной плоскости - в виде гирополукомпаса. Устройство снабжено системой вторичных преобразователей, коммутатором, аналогово-цифровым преобразователем и микроконтроллером.
Известно устройство для определения пространственного положения магистральных трубопроводов (патент №1404815 A1 (SU) от 23.06.1988). Устройство содержит корпус с гиросистемой, состоящей из гирокомпаса, гировертикали и датчика положения корпуса, выполненный в виде излучателя, скрепленного с гиросистемой. Корпус предназначен для установки в трубопроводе. Гиросистема снабжена фоконной матрицей, торцы которой оптически сопряжены с излучателем, со светочувтвительной лентой, обладающей возможностью перемещения в корпусе.
Известно устройство контроля внутренней поверхности, пространственного положения и напряженного состояния трубопровода (патент №2106569 C1 (RU) от 10.03.1998). Устройство имеет измерительный модуль, состоящий из контейнера, внутри которого расположена аппаратура измерения плановых и высотных меток, состоящей из цифрового вычислительного комплекса и трехосного гиростабилизатора с гироблоком и акселерометром. На наружной поверхности контейнера расположен второй датчик пути, соединенный с аппаратурой измерения плановых и высотных меток.
Недостатками выше указанных устройств являются автономность полученных данных, что влечет за собой погрешности определения положения трубопровода; а также полученные навигационные данные, не отражают всех параметров положения трубопровода, таких как углы и радиусы изгиба трубопровода в пространстве.
Известна аппаратура для измерения линейных деформаций магистрального трубопровода (патент №2334162 C1 от 20.09.2008), содержащая струнные датчики деформации, установленные в различных сечениях магистрального трубопровода с определенным одинаковым шагом. Аппаратура дополнительно содержит приемник спутниковой радионавигационной системы, мультиплексор, микропроцессор, запоминающее устройство начального уровня, аналогово-цифровой преобразователь. Недостатком данного изобретения является стационарная установка датчиков деформации, что не позволяет получить полную информацию об изменении положения трубопровода.
Цель изобретения состоит в создании устройства диагностического комплекса для определения положения трубопровода (далее ДКОПТ) с использованием глобальной навигационной спутниковой систему GPS или/и GLONASS, которое повышает точность измерений пространственного положения трубопровода с учетом корректирующих точек, а также повышает точность измерений углов изгиба трубопровода - тангажа и азимута, и радиусов изгиба в каждой точке трубопровода с учетом вращения Земли; а также в способе определения относительного перемещения трубопровода по результатам двух и более инспекционных пропусков ДКОПТ, наглядно позволяющем определить перемещение трубопровода в пространстве путем сравнения более поздних траекторий трубопровода с базовой.
Технический результат достигается тем, что заявленное устройство ДКОПТ состоит из аппаратной части (далее АЧ) и программной части. Аппаратная часть ДКОПТ установлена на внутритрубный инспекционный прибор (далее ВИП). Аппаратная часть состоит из набора датчиков: акселерометр, связанный с осью X бесплатформенной инерционной навигационной системы (далее БИНС), акселерометр, связанный с осью Y БИНС, акселерометр, связанный с осью Z БИНС, гироскоп, связанный с осью X БИНС, гироскоп, связанный с осью Y БИНС, гироскоп, связанный с осью Z БИНС, одометр. Программная часть состоит из алгоритмов определения навигационных параметров в следующей последовательности: расчет линейной скорости при этом определение движения внутритрубного инспекционного прибора происходит по данным, полученным от аппаратной части устройства диагностического комплекса для определения положения трубопровода; выставка, то есть определение положения в пространстве ВИП производится определением начальных углов азимута и тангажа в прямоугольной системе координат Север-Восток-Высота с учетом вращения Земли и заданным геодезическим координатам ВИП в течение первых нескольких минут, когда ВИП неподвижен; расчет навигационных параметров происходит с использованием значение дискрета времени между отчетами акселерометров и гироскопов и показаниями одометра с определением соответствующих углов: крена, тангажа, азимута; расчет радиусов изгиба трубопровода как в вертикальном, так и горизонтальном направлении; коррекция траектории происходит при использовании координат корректирующих точек, полученных привязкой конкретных точек трубопровода к геодезическим координатам в системе Север-Восток-Высота с использованием глобальной спутниковой навигационной системы GPS или/и GLONASS. Данные переписываются с АЧ ДКОПТ, и расчет навигационных параметров производится на ЭВМ с помощью специальной программы. Таким образом, данные, полученные с АЧ ДКОПТ представляют собой массив, содержащий показания трех акселерометров и трех гироскопов в связанной с ортогональными осями БИНС и соответственно с ВИП прямоугольной системой координат и показания одометра. При этом ось у БИНС соответствует продольной оси ВИП. После инспекционного пропуска по трубопроводу ВИП массив данных переписывается с АЧ ДКОПТ, и расчет всех навигационных параметров производится на ЭВМ с помощью специальной программы. Используя данные ДКОПТ с использованием глобальной навигационной спутниковой системы GPS или/и GLONASS, повышается точность измерений пространственного положения трубопровода с учетом корректирующих точек. Величина и направления перемещения трубопровода определяются по результатам двух и более инспекционных пропусков по одному и тому же участку трубопровода.
Способ определения относительного перемещения трубопровода по результатам двух и более инспекционных пропусков ДКОПТ состоит в том, что используются данные измерения величин и направлений линейных перемещений участка трубопровода по результатам двух и более инспекционных пропусков ВИП с установленным на нем ДКОПТ по одному и тому же участку трубопровода с одним и тем же направлением потока рабочей среды. Данные, полученные с ДКОПТ, располагаются по таблицам и совмещаются по дистанциям. Используются данные, полученные с ДКОПТ, для вычисления максимальной величины, направления и угла перемещения трубопровода.
Данные пропуска ВИП с установленной на нем АЧ ДКОПТ с более ранней датой считаются базовыми, а данные последующих пропусков сравниваются с базовыми. Критерием наличия перемещения трубопровода на инспектируемом участке является превышение модуля разностной кривизны заданного порогового значения.
Предложенный способ определения относительного перемещения трубопровода по результатам двух и более инспекционных пропусков ДКОПТ наглядно позволяет определить перемещение трубопровода в пространстве.
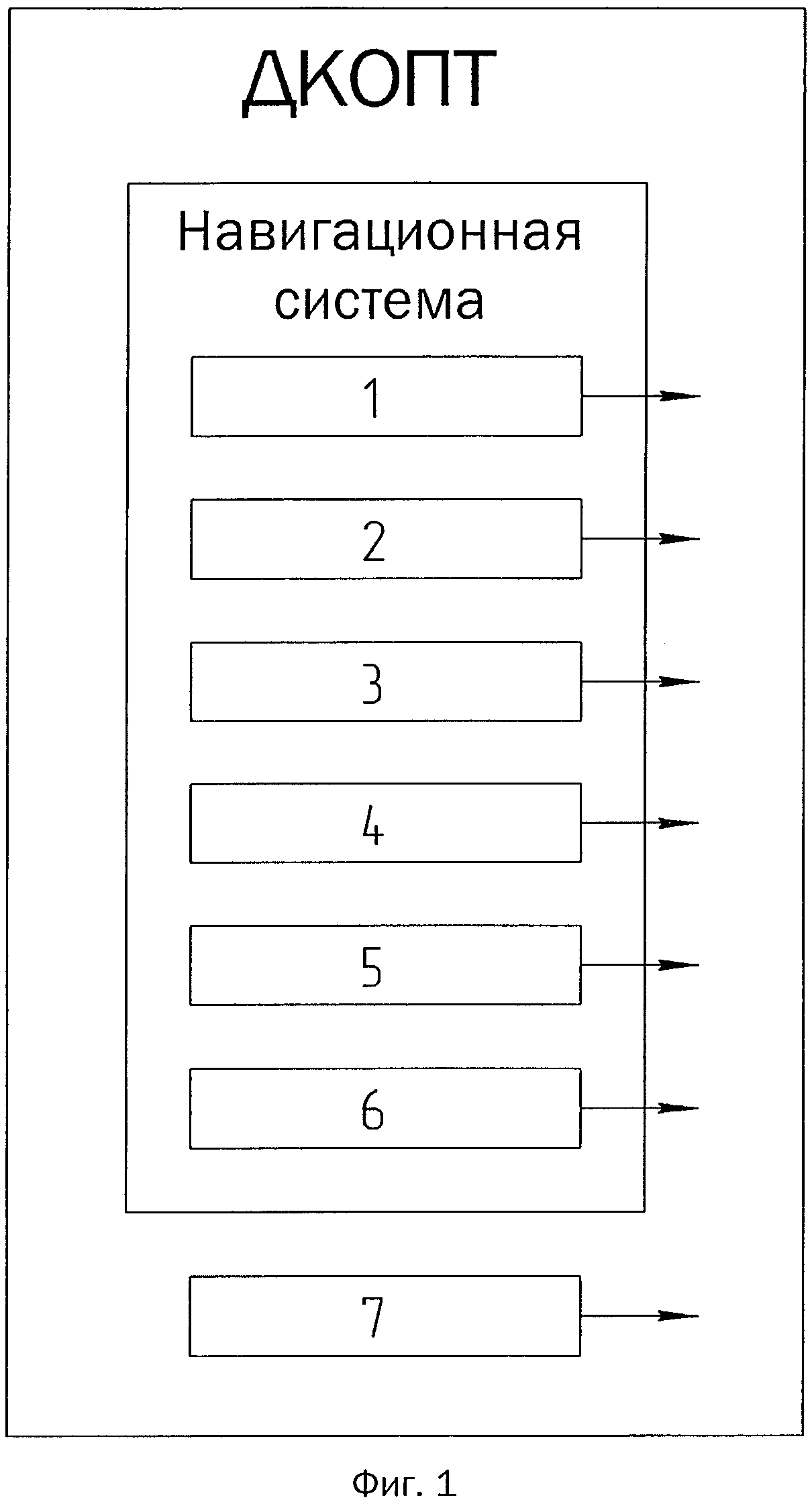
На фиг.1 изображена аппаратная часть ДКОПТ, включающая в себя набор датчиков.
1. акселерометр, связанный с ортогональной осью X БИНС, ах [м/с2];
2. акселерометр, связанный с ортогональной осью Y БИНС, ay [м/с2];
3. акселерометр, связанный с ортогональной осью Z БИНС, az [м/с2];
4. гироскоп, связанный с ортогональной осью Х БИНС, gx [рад/С];
5. гироскоп, связанный с ортогональной осью Y БИНС, gy [рад/С];
6. гироскоп, связанный с ортогональной осью Z БИНС, gz [рад/с];
7. одометр, bj [имп.].
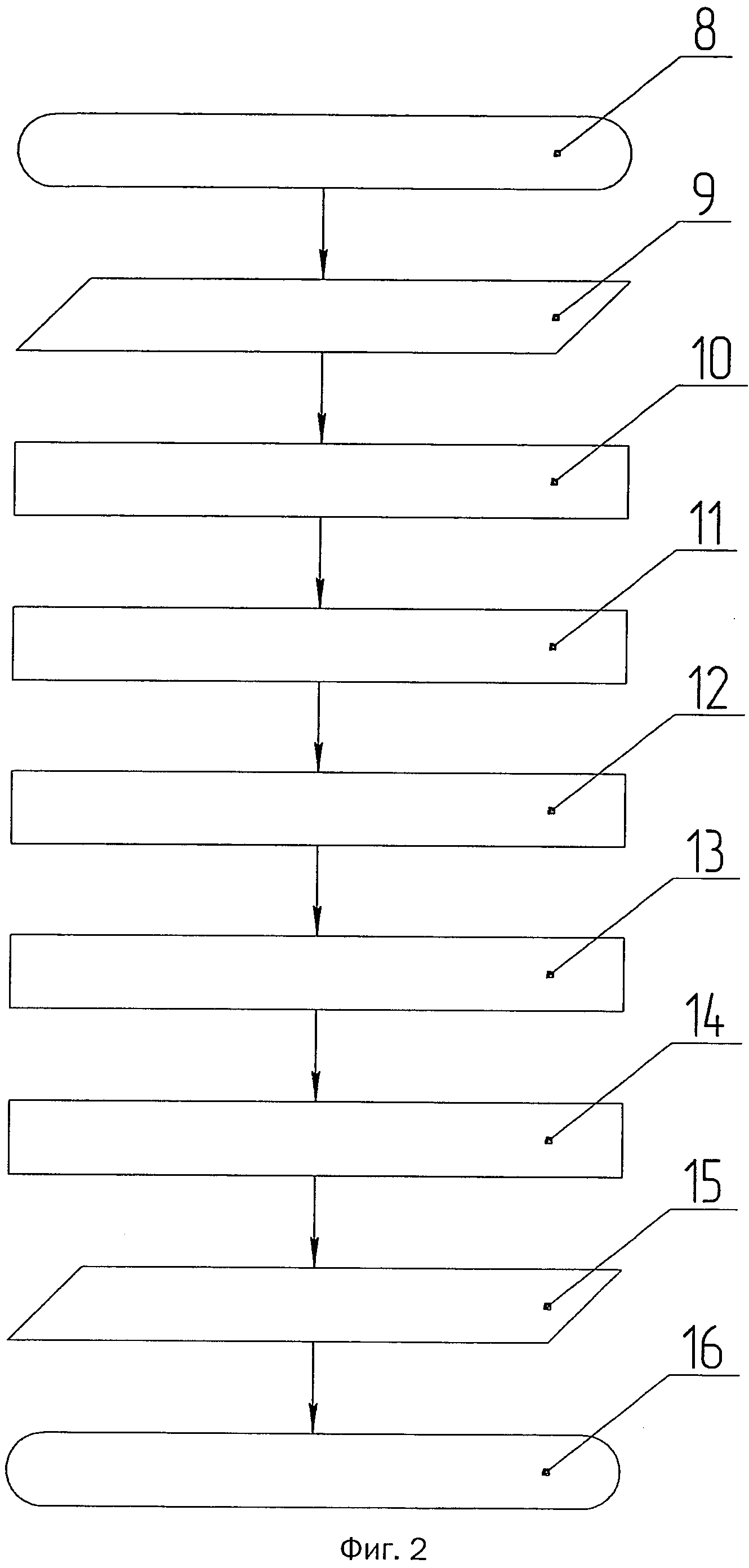
На фиг.2 изображена блок-схема алгоритмов определения навигационных параметров программной части ДКОПТ:
8. «Начало»;
9. «Получение данных (по акселерометрам, гироскопам и одометру) для значений сканов j=1…N;
10. алгоритм «Расчет линейной скорости»;
11. алгоритм «Выставка», то есть определение положение ВИП в пространстве;
12. алгоритм «Расчет навигационных параметров»;
13. алгоритм «Расчет радиусов»;
14. алгоритм «Коррекция траектории»;
15. «Вывод данных»;
16. «Конец».
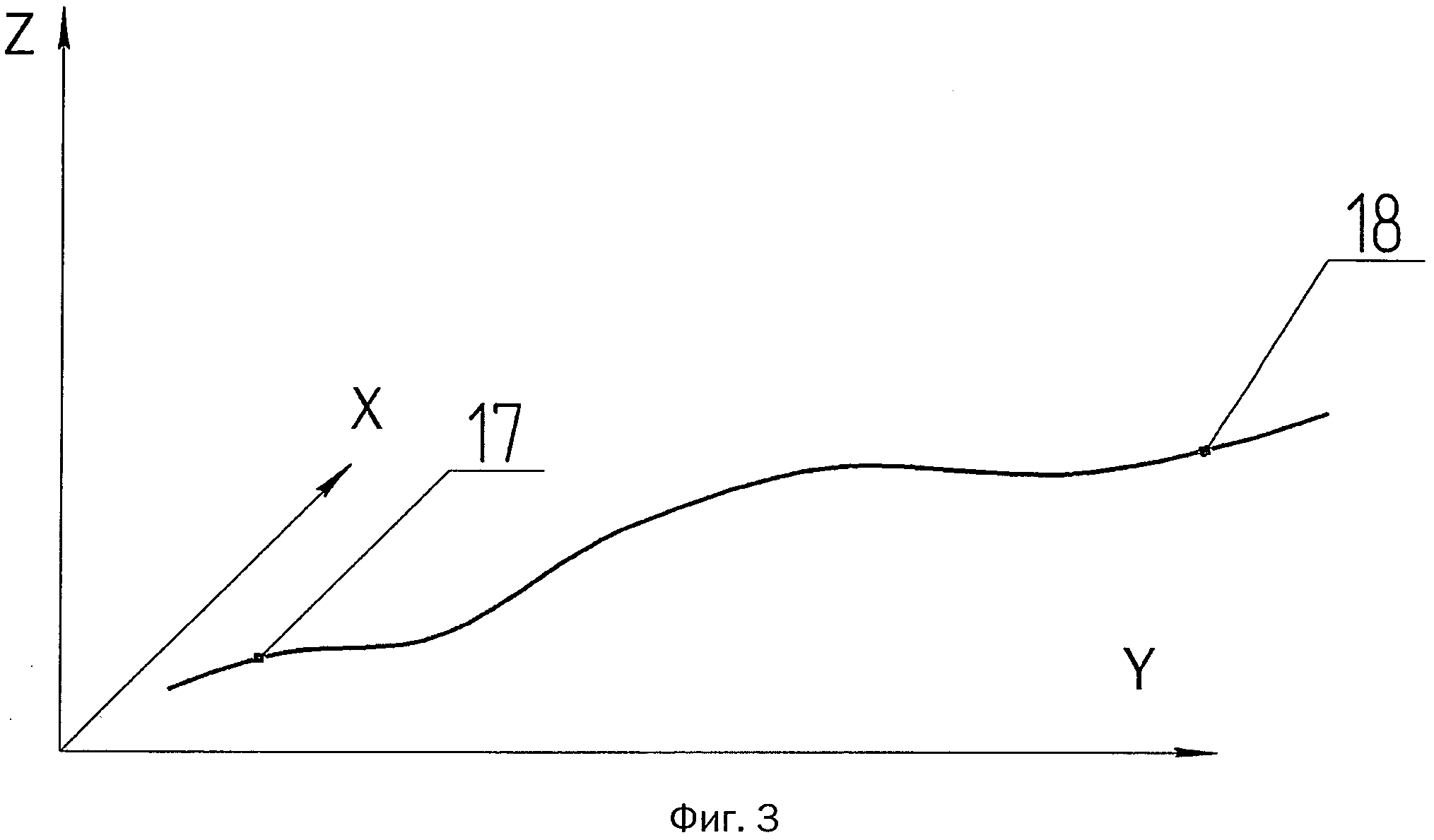
На фиг.3 изображена траектория залегания трубопровода, выявленная по результатам базового пропуска ДКОПТ:
17. точка начала участка перемещения инспектируемого участка трубопровода с координатами x1, y1, z1;
18. точка конца участка перемещения инспектируемого участка трубопровода с координатами x2, y2, z2;
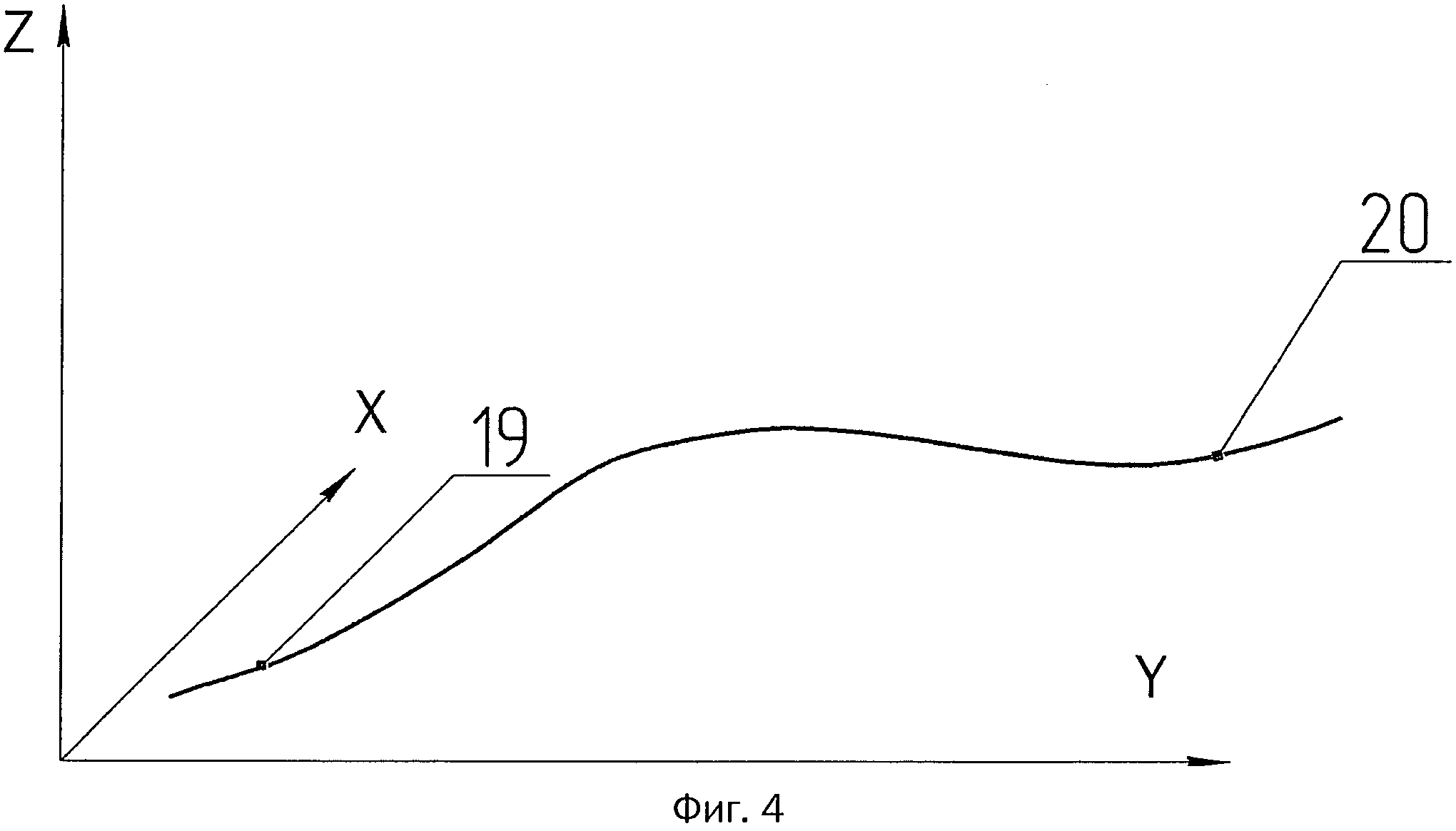
На фиг.4 изображена траектория залегания трубопровода, выявленная по результатам повторного пропуска ДКОПТ:
19. точка начала участка перемещения инспектируемого участка трубопровода с координатами  ,
,  ,
,  ;
;
20. точка конца участка перемещения инспектируемого участка трубопровода с координатами  ,
,  ,
,  ;
;
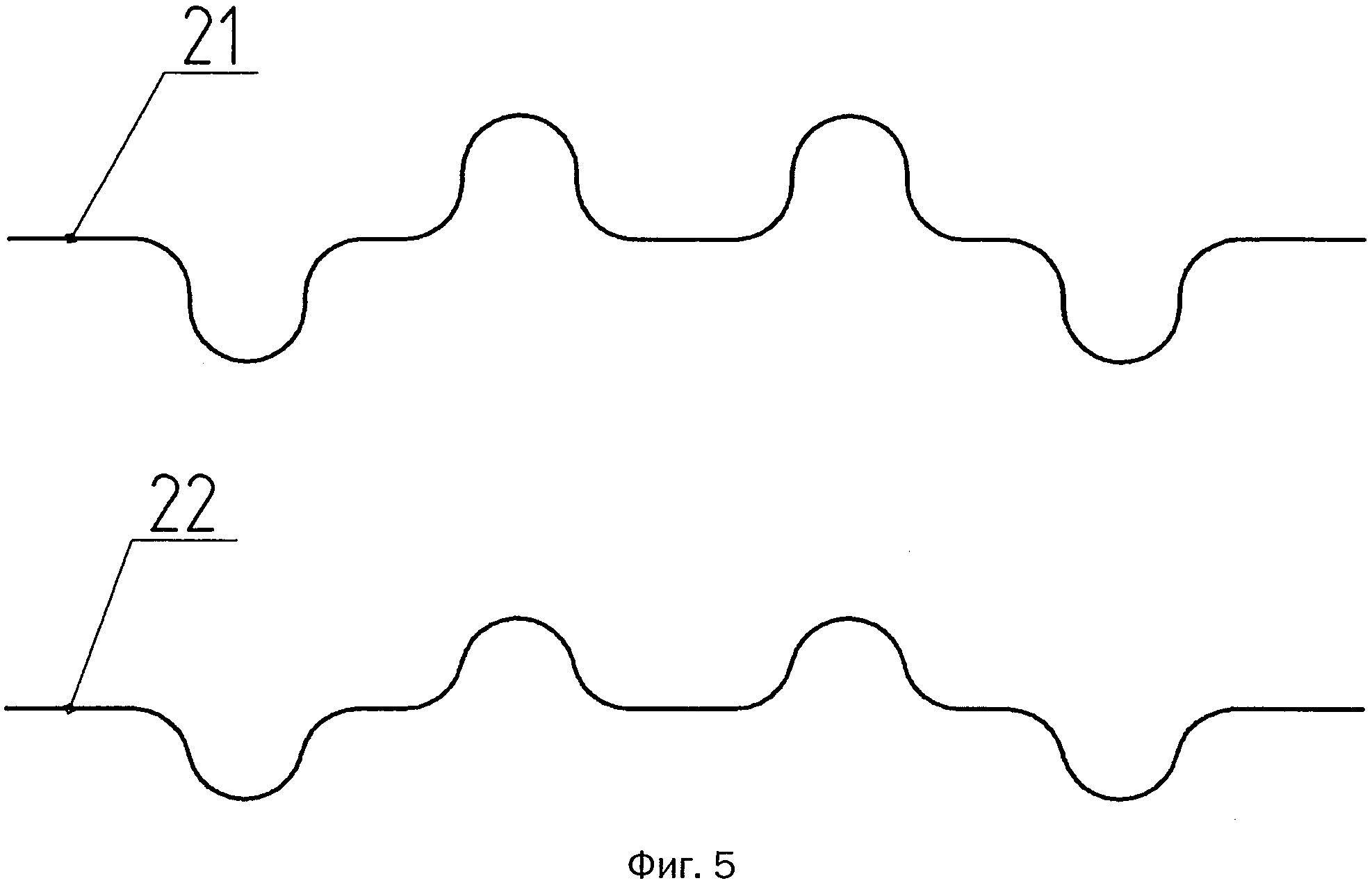
На фиг.5 изображены выделенные горизонтальная и вертикальная составляющие кривизны трубопровода, выявленные по результатам базового пропуска ДКОПТ:
21. вертикальная составляющая кривизны трубопровода, EV;
22. горизонтальная составляющая кривизны трубопровода, ЕН.
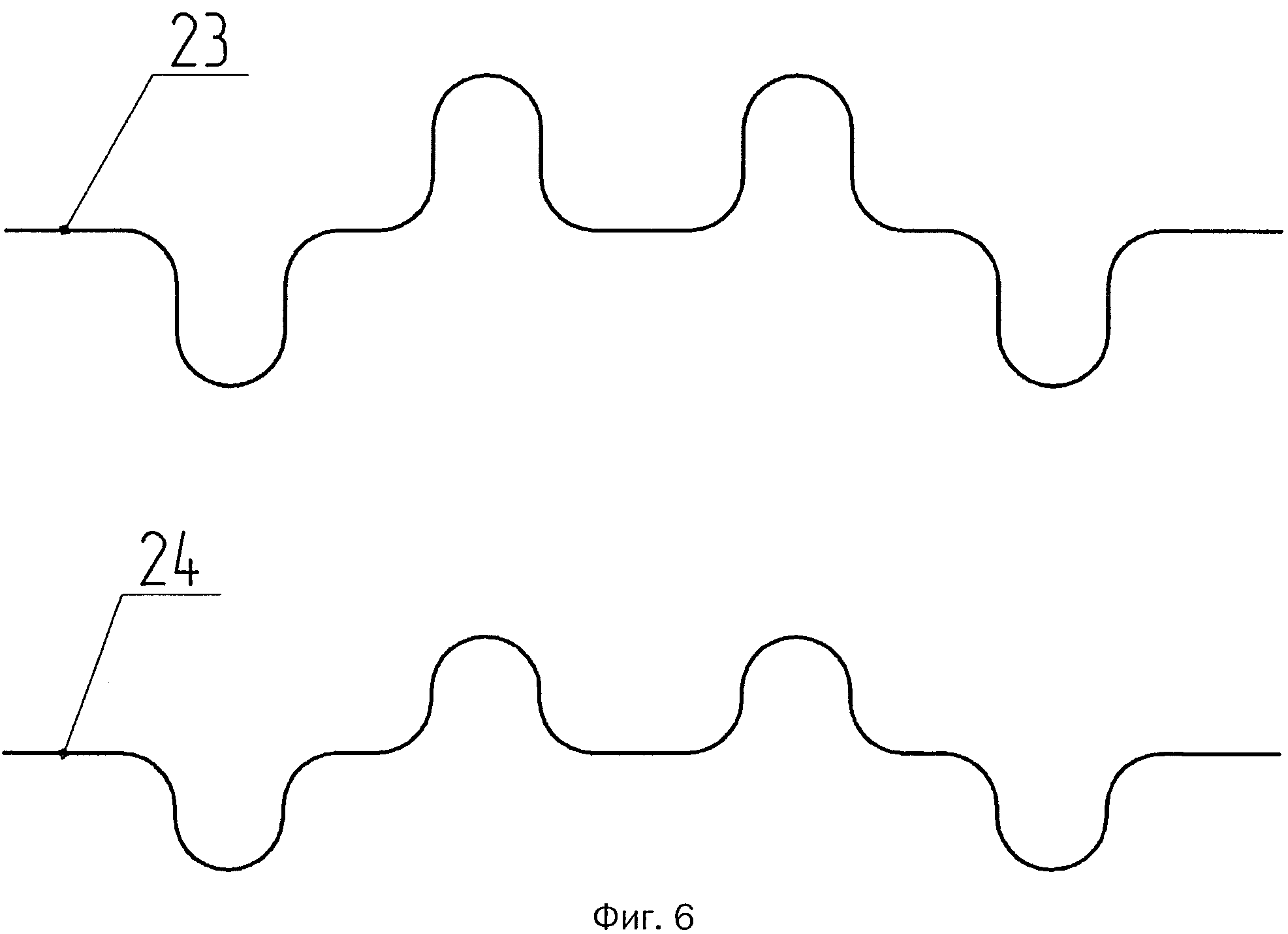
На фиг.6 изображены выделенные горизонтальная и вертикальная составляющие кривизны трубопровода, выявленные по результатам повторного пропуска ДКОПТ:
23. вертикальная составляющая кривизны трубопровода, EV;
24. горизонтальная составляющая кривизны трубопровода, ЕН;
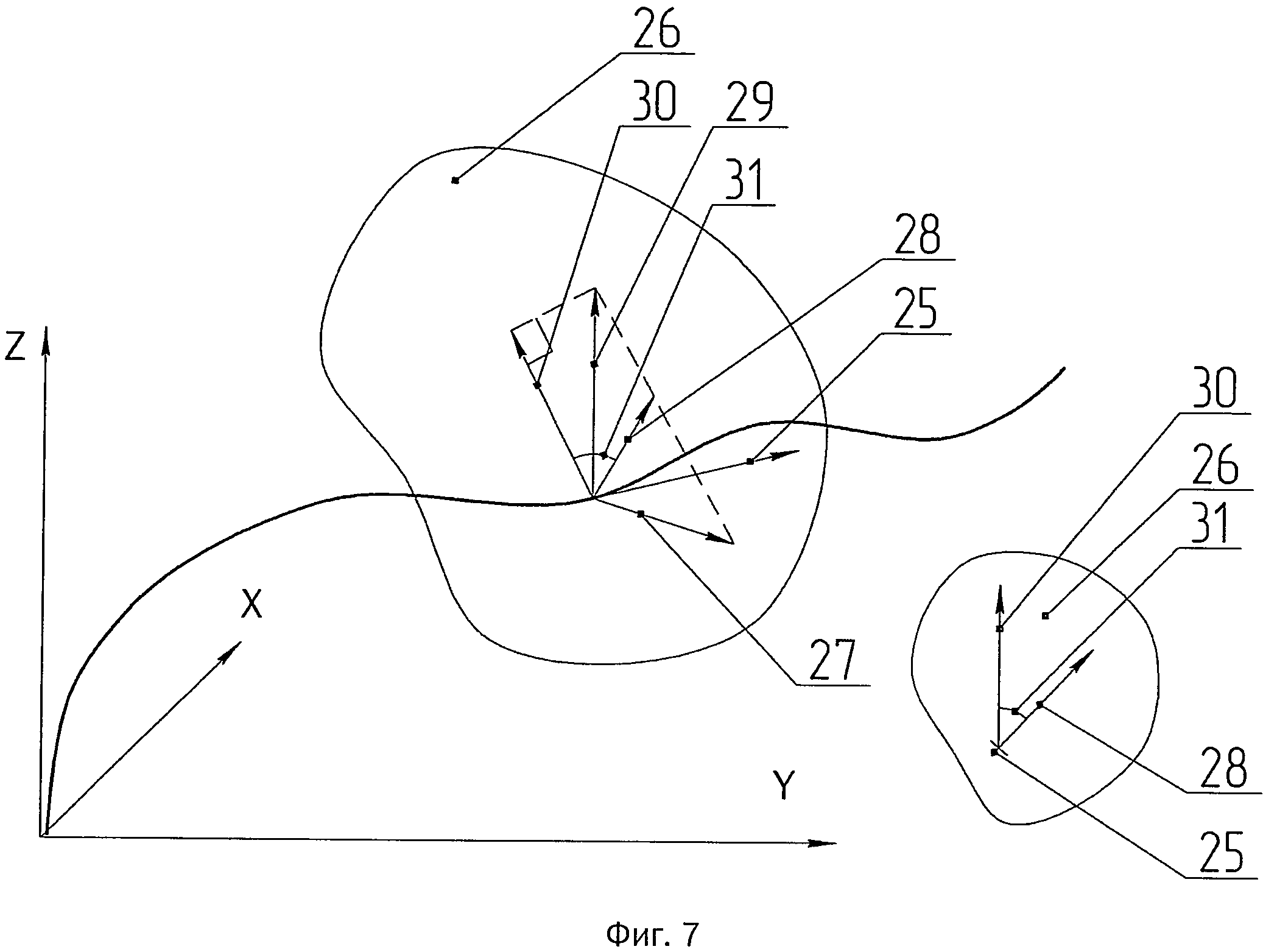
На фиг.7 изображено определение направления вектора перемещения трубопровода и угол направления перемещения трубопровода:
25. единичный вектор направления оси трубопровода,  ;
;
26. плоскость, перпендикулярная единичному вектору
, р;
27. рассчитанный вектор перемещения оси трубопровода,  ;
;
28. проекция рассчитанного вектора перемещения оси трубопровода  на плоскость р,
на плоскость р,  ;
;
29. единичный вектор вертикали,  ;
;
30. проекция вертикали  на плоскость р,
на плоскость р,  ;
;
31. искомый угол направления перемещения трубопровода, α.
ДКОПТ состоит из аппаратной части и программную часть. АЧ (фиг.1) включает в себя акселерометры 1, 2, 3 (фиг.1), гироскопы 4, 5, 6 (фиг.1) в связанной с БИНС и соответственно с ВИП прямоугольной системе координат и одометра 7 (фиг.1). Данные, полученные с АЧ ДКОПТ представляют собой массив, содержащий показания трех акселерометров 1, 2, 3 (фиг.1) и трех гироскопов 4, 5, 6 (фиг.1) в связанной с ортогональными осями БИНС и соответственно с ВИП прямоугольной системе координат и показания одометра 7 (фиг.1). Программная часть состоит из алгоритмов определения навигационных параметров на основе данных с АЧ ДКОПТ для значения сканов j=1…N 9 (фиг.2) в следующей последовательности:
Алгоритм «Расчет линейной скорости» 10 (фиг.2): используя показания одометра и показания таймера импульсов одометра, рассчитывается скорость движения ДКОПТ:
sj=bjf0,
V=F{S, L, c}/Δt, где
f0 - одометрический фактор;
sj - пройденный путь;
S=[s1, s2 … sN], V=[v1, v2 … vN] - линейная скорость;
Δt - дискрет времени;
F{•, L, c} - фильтрация скользящих средним с прямоугольным окном: Pf=F{S, L, c],
Pf=[pf1 pf2 … pfN];
 - среднее по выборке проранжированных по возрастанию данных Pr, исходными для которых является массив [pj-L … pj … pj+L] для j-отсчета;
- среднее по выборке проранжированных по возрастанию данных Pr, исходными для которых является массив [pj-L … pj … pj+L] для j-отсчета;
j-L>0, j+L<N, L - половина ширины окна фильтра;
с - удаляемое количество проранжированных данных в долях единицы.
Алгоритм «Выставка», то есть определение положения ВИП в пространстве 11 (фиг.2): в начальный момент времени пропуска ВИП остается неподвижен несколько минут. Этот промежуток времени отслеживается по значениям скорости движения, полученной на предыдущем этапе. В это время производится выставка БИНС. По вращению Земли и заданным геодезическим координатам ВИП определяются начальные углы азимута и тангажа в прямоугольной системе координат Север-Восток-Высота. В дальнейшем при расчете прохождения ВИП по трубопроводу определяемые значения этих углов позволяют учесть вращение Земли и вычесть соответствующую компоненту угловой скорости Земли из показаний гироскопов. Таким образом, вращение Земли практически не оказывает влияния на определяемые навигационные параметры. Режим выставки подразделяется на два этапа: грубая и точная выставки.
Грубая выставка - приближенное вычисление параметров:
γc=-arctg(αxM/αzM),
 ,
,
Где arctg(•) - вычисление арктангенса с учетом квадранта аргументов;
 , i=x, y, z, Lc - количество отсчетов, отводимых на грубую выставку, во время которой ВИП неподвижен;
, i=x, y, z, Lc - количество отсчетов, отводимых на грубую выставку, во время которой ВИП неподвижен;
γс - угол крена;
θс - угол тангажа;
Точная выставка - уточнение параметров проводится в несколько этапов:
Первый этап:
 ,
,
 ,
,
 , где
, где
 - начальное значение нормированного полного кватерниона, полученного из углов Эйлера;
- начальное значение нормированного полного кватерниона, полученного из углов Эйлера;
 - начальное значение угловой скорости Земли;
- начальное значение угловой скорости Земли;
j=Lc … La, La - количество отсчетов, отводимых на точную выставку, в это время ВИП неподвижен;
i=ω, g, φA - широта точки выставки;
γj, θj, ψj, xj - соответственно текущие углы крена, тангажа, азимута, угол направления на географический север - азимут навигационной системы координат;
ωE - угловая скорость Земли;
c1…c6 - константы.
Второй этап:
 , где
, где
Kj - текущее значение нормированного полного кватерниона.
Третий этап
Четвертый этап:
Пятый этап
Далее идет расчет текущего значения угловой скорости:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 , где
, где
Bj - приращение линейной скорости на текущем кванте времени;
 и
и  - параметры петли обратной связи по оценке угловой скорости вращения прибора в горизонтальной плоскости;
- параметры петли обратной связи по оценке угловой скорости вращения прибора в горизонтальной плоскости;
* - символ принадлежности к связанной системе координат.
Навигационная система координат (далее НСК) представляет собой прямоугольную систему координат, начало которой связано с точкой выставки, основная плоскость - плоскость местного горизонта, одна ось направлена вверх. При преобразовании из НСК в связанную систему и наоборот в результирующий вектор входят последние три элемента перемножения.
Алгоритм «Расчет навигационных параметров» 12 (фиг.2) делится на несколько этапов:
 ,
,
 ,
,

 .
.
Второй этап
По математическим выражениям первого и второго этапов «Точной выставки» алгоритма «Выставка» определяется ориентация ВИП, а по математическим выражениям третьего, четвертого и пятого этапов «Точной выставки» алгоритма «Выставка» определяются соответствующие углы:
 ,
,
 ,
,
 ,
,
 ,
,

 .
.
Данные по скорости и углам позволяют определить скорости в системе координат Север-Восток-Высота. Интегрируя эти скорости по времени, получаются значения соответствующих координат:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 , где
, где
 и Wj - начальное и текущее значения нормированного кватерниона, определяющего угловое положение НСК;
и Wj - начальное и текущее значения нормированного кватерниона, определяющего угловое положение НСК;
j=La … N;
 и Ωj - начальное и текущее значения вектора угловой скорости Земли в НСК;
и Ωj - начальное и текущее значения вектора угловой скорости Земли в НСК;
Σj - вектор транспортирующей угловой скорости;
Zj - элементы третьего столбца матрицы направляющих косинусов по компонентам нормированного кватерниона;
 - вектор линейных скоростей в НСК;
- вектор линейных скоростей в НСК;
 ,
,  ,
,  , ej, nj, uj - соответственно скорости и координаты по осям Восток-Север-Высота;
, ej, nj, uj - соответственно скорости и координаты по осям Восток-Север-Высота;
ek - эксцентриситет Земли;
re - экваториальный радиус Земли.
Алгоритм «Расчет радиусов» 13 (фиг.2): так как изгиб трубопровода может происходить как в вертикальном, так и в горизонтальном направлении, можно выделить горизонтальную и вертикальную составляющие кривизны, где кривизной изгиба трубопровода называется величина, обратная радиусу изгиба трубопровода. Для вычисления кривизн траектории используются значения линейной скорости прибора и углов азимута и тангажа. Значение горизонтальной кривизны определяется как отношение производной по времени от азимута к линейной скорости, вертикальной - как отношение производной по времени от тангажа к линейной скорости.
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где  и
и  - соответственно горизонтальный и вертикальный малые радиусы;
- соответственно горизонтальный и вертикальный малые радиусы;
 и
и  - соответственно горизонтальный и вертикальный большие радиусы.
- соответственно горизонтальный и вертикальный большие радиусы.
j=La … N, ΔSj=Sj-Sj-1,
Δψj=ψj-ψj-1,
Δθj=θj-θj-1, где
ΔS - фиксированное значение базовой дистанции для определения больших радиусов, в этом случае приращение угла определяется по значениям углов на краях ΔS, а значение рассчитанного радиуса ставится в соответствии точке посередине ΔS,
 и
и  - соответствующие средние оценки углов на базовой дистанции;
- соответствующие средние оценки углов на базовой дистанции;  ,
,  ,
,  ,
,  и аналогично для векторов радиусов с индексом f, где
и аналогично для векторов радиусов с индексом f, где
Ls, LB - соответствующие параметры окна фильтра.
Алгоритм «Коррекция траектории» 14 (фиг.2): при использовании координат корректирующих точек, полученных на основе данных спутниковой системы GPS или (и) GLONASS, происходит коррекция полученной траектории и ее перенос на координатную сетку Север-Восток-Высота:
ΔE=I{ΔE′, K, M},
ej=ej+Δej,
ΔN=I{ΔN′, K, M},
nj=nj+Δnj,
ΔU=I{ΔU′, K, M],
uj=uj+Δuj, где
Δej, Δnj, Δuj - корректирующие добавки по соответствующим осям;
j=La … N, ΔЕ=[ΔeLaΔeLa+1 … ΔeN], ΔN=[ΔnLaΔnLa+1 … ΔnN], ΔU=[ΔULaΔuLa+1 … ΔuN];
|{•, K, M] - операция линейной интерполяции К значений на М=N-La;
 ,
,  ,
,  - соответствующие разницы по координатам корректирующих точек и точек полученной траектории для соответствующих дистанций;
- соответствующие разницы по координатам корректирующих точек и точек полученной траектории для соответствующих дистанций;
 ,
,  ,
,  , k=1 … K,
, k=1 … K,  - координаты корректирующей точки для
- координаты корректирующей точки для  , дистанции (дистанция, для которой измерены координаты корректирующей точки);
, дистанции (дистанция, для которой измерены координаты корректирующей точки);
[eknkuk] - координаты корректируемой траектории для sk дистанции, при этом две указанные дистанции должны быть максимально близки;
K - количество корректирующих точек.
Способ определения величины и направления перемещения трубопровода по результатам двух и более инспекционных пропусков ДКОПТ предполагает использование данных по измеренным БИНС навигационным параметрам одного и того же участка трубопровода. Предложенный способ определения относительного перемещения трубопровода по результатам двух и более инспекционных пропусков ДКОПТ наглядно позволяет определить перемещение трубопровода в пространстве. Расположенная по таблицам информация о пропусках ДКОПТ по одному и тому же участку трубопровода совмещается по дистанциям. Пропуск ДКОПТ по инспектируемому участку трубопровода с более ранней датой считается базовым (фиг.3). Последующий пропуск ДКОПТ по инспектируемому участку трубопровода (фиг.4) сравниваются с базовым. Прогиб участка трубопровода может происходить как в вертикальном, так и в горизонтальном направлениях. Для этого выделяются вертикальная составляющая кривизны изгиба трубопровода: базовая 21 (фиг.5) и последующая 23 (фиг.6), и горизонтальная составляющая кривизны изгиба трубопровода: базовая 22 (фиг.5) и последующая 24 (фиг.6). Кривизной изгиба участка трубопровода называется величина, обратная радиусу изгиба участка трубопровода:
E=1/R, где
R - радиус изгиба участка трубопровода.
Между повторным и базовым пропусками ДКОПТ по участку инспектируемого трубопровода вычисляется разностный вектор:
 , где
, где
ЕН 22 (фиг.5) и ЕН′ 24 (фиг.6) соответственно горизонтальная составляющая кривизны, выявленная по результатам базового пропуска ДКОПТ по участку инспектируемого трубопровода, и горизонтальная составляющая кривизны, выявленная по результатам последующего пропуска ДКОПТ по участку инспектируемого трубопровода;
EV 21 (фиг.5) и EV′ 23 (фиг.6) соответственно вертикальная составляющая кривизны, выявленная по результатам базового пропуска ДКОПТ по участку инспектируемого трубопровода, и вертикальная составляющая кривизны, выявленная по результатам последующего пропуска ДКОПТ по участку инспектируемого трубопровода. Модуль разностной кривизны:
 .
.
Превышение модуля разностной кривизны выше некоторого заданного порогового значения является критерием наличия перемещения на инспектируемом участке трубопровода.
Из навигационных данных определяются координаты точки начала участка перемещения 17 (фиг.3) и конца участка перемещения 18 (фиг.3) инспектируемого участка трубопровода при базовом пропуске ДКОПТ. При повторном пропуске ДКОПТ по инспектируемому участку трубопровода точки начала и конца участка перемещения соответственно 19 (фиг.4) и 20 (фиг.4).
Для того, чтобы вычислить величину вертикального перемещения внутри участка, необходимо приравнять координаты на границах участка перемещения инспектируемого участка трубопровода, а затем вычислить разницу координат внутри участка. Для этого рассчитывается:
где Z1 и Z2 соответственно вертикальные координаты начала и конца участка перемещения инспектируемого участка трубопровода при базовом пропуске ДКОПТ;
 и
и  соответственно вертикальные координаты начала и конца участка перемещения инспектируемого участка трубопровода при последующем пропуске ДКОПТ.
соответственно вертикальные координаты начала и конца участка перемещения инспектируемого участка трубопровода при последующем пропуске ДКОПТ.
После этого вычисляется фактическая разность координат по вертикали в точке р инспектируемого участка трубопровода между базовым и повторном пропусках ДКОПТ на инспектируемом участке трубопровода:
 , где
, где
L - длина участка перемещения;
L1- дистанция от начала участка перемещения до выбранной точки р.
Для того, чтобы вычислить величину горизонтального перемещения внутри участка перемещения инспектируемого участка трубопровода, необходимо развернуть траектории базового и повторного пропуска ДКОПТ в горизонтальной плоскости таким образом, чтобы координаты начала и конца участка перемещения по оси Y стали нулевыми. Для этого рассчитываются координаты развернутых траекторий:




Фактическая разность координат в горизонтальной плоскости:

Использование раздельной процедуры расчета перемещений в вертикальной и горизонтальной плоскости позволяет снизить ошибки определения перемещений, когда траектории трубопровода при базовом и последующем пропусках в горизонтальной плоскости стремятся к ортогональному положению.
Абсолютная величина перемещения:
Максимальная величина перемещения участка трубопровода может быть определена как максимальное значение абсолютного перемещения.
Направление рассчитанного вектора перемещения 27 (фиг.7) необходимо определить в плоскости 26 (фиг.7), перпендикулярной оси трубопровода, за 0° принимается положение «на 12 часов». Внутри участка перемещения участка инспектируемого трубопровода вычисляются векторы направления движения. Точками начала и конца вектора предлагается установить координаты сварных швов отдельных секций трубопровода.
Единичный вектор направления оси трубопровода 25 (фиг.7):
 где
где
 ,
, ;
;  ,
,  ,
,  - координаты начала отдельной секции трубопровода;
- координаты начала отдельной секции трубопровода;
 ,
,  ,
,  - координаты конца отдельной секции трубопровода;
- координаты конца отдельной секции трубопровода;
nx, ny, nz - координаты единичного вектора 25 (фиг.7).
Рассчитанный вектор перемещения 27 (фиг.7):
Проекция рассчитанного вектора перемещения 28 (фиг.7), перпендикулярная направлению движения рабочей среды, трубопровода рассчитывается по формуле:
Затем рассчитывается коэффициент:

Тогда с учетом рассчитанного коэффициента проекция рассчитанного вектора перемещения 28 (фиг.7) -

 где
где
Δpx, Δpy, Δpz - координаты проекции рассчитанного вектора 28 (фиг.7) на плоскость 26 (фиг.7).
Проекция вертикали 30 (фиг.7) на плоскость 28 (фиг.7), перпендикулярную направлению движения рабочей среды в трубопроводе:

 где
где
zPX, zPY, zPZ - координаты проекции вертикали 30 (фиг.7) на плоскость 28 (фиг.7).
Косинус искомого угла направления перемещения 31 (фиг.7) находится по формуле:

Направление перемещения:
S=nVX·nX+nVY·nY+nVZ·nZ,

Если S>0, α=arccosC. Если S<0, α=360-arccosC.
Способ теплоизоляции запорно-регулирующей арматуры малых диаметров
Способ получения скользящего листа затвора плавающей крыши резервуара
Cпособ контроля очистки трубопровода и устройство для его реализации
Способ ремонта трубопровода путем установки композитной муфты
Способ сварки трубопроводов без предварительного подогрева стыков
Способ испытания внутритрубного инспекционного прибора на кольцевом трубопроводном полигоне
Способ совместной обработки данных диагностирования по результатам пропуска комбинированного внутритрубного инспекционного прибора
Способ определения планово-высотного положения подземного магистрального трубопровода
Способ монтажа обводной линии трубопровода, находящегося под давлением
Способ очистки и нанесения антикоррозийного покрытия на внутреннюю поверхность дымовой трубы
Способ теплоизоляции запорно-регулирующей арматуры малых диаметров
Способ получения скользящего листа затвора плавающей крыши резервуара
Cпособ контроля очистки трубопровода и устройство для его реализации
Способ ремонта трубопровода путем установки композитной муфты
Способ сварки трубопроводов без предварительного подогрева стыков
Способ испытания внутритрубного инспекционного прибора на кольцевом трубопроводном полигоне
Способ совместной обработки данных диагностирования по результатам пропуска комбинированного внутритрубного инспекционного прибора
Способ определения планово-высотного положения подземного магистрального трубопровода
Способ монтажа обводной линии трубопровода, находящегося под давлением
Способ очистки и нанесения антикоррозийного покрытия на внутреннюю поверхность дымовой трубы

