Результат интеллектуальной деятельности: АКТИВНЫЙ ГИДРОЛОКАТОР
Вид РИД
Изобретение
Изобретение относится к гидроакустической технике, в частности к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для поиска надводных судов в контролируемой зоне морской поверхности с возможностью обеспечения гидролокационного поиска крупногабаритных протяженных объектов на поверхности воды в заданном секторе обзора, а также определения координат, ориентации и осадки обнаруженных на поверхности крупногабаритных объектов (надводных судов) в составе системы управления движением судов (СУДС).
Одна из основных задач системы управления движением судов (СУДС) заключается в оперативном контроле за перемещением судов на основе анализа первичной навигационной информации, поступающей от береговых радиолокационных станций, а также данных, передаваемых бортовыми системами по каналам автоматической идентификационной системы (АИС). К основным навигационным параметрам, используемым в СУДС для анализа обстановки, относятся координаты судна, его скорость и путевой угол. В сложных навигационных условиях, например в шельфовых зонах или на узких извилистых фарватерах, снижение риска возникновения аварийных ситуаций связано с доступностью дополнительных данных, к которым относится осадка судна и его истинный курс и от которых, фактически, зависят границы зоны безопасного плавания и ширина полосы, занимаемой судном на фарватере.
В настоящее время не существует береговых средств дистанционного контроля осадки и истинного курса судна и единственным их источником остается бортовое навигационное оборудование, способное передавать в СУДС текущие значения этих параметров по каналам АИС. Использование активных гидролокационных систем (ГАС) в составе СУДС позволит минимизировать навигационные риски, возникающие при перебоях в работе АИС из-за отказа оборудования и при высоких уровнях помех в каналах связи. Позиционные ГАС могут развертываться вблизи постоянно существующих либо временных навигационных опасностей и предназначаются для сбора и передачи информации о координатах, истинном курсе и осадке проводимого судна непосредственно в СУДС. Основным требованием к собираемой ГАС навигационной информации о судне является ее достаточность для завершения ранее начатой проводки в период неработоспособности радионавигационных средств, включая береговые РЛС, АИС и бортовые спутниковые навигационные системы (СНС).
Известны активные гидролокаторы, включающие акустические излучающую и приемную антенны, генераторное устройство, блок синхронизации, устройство формирования характеристик направленности, блок измерения времени задержки эхо-сигнала от цели относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхо-сигнала в вертикальной плоскости, блок вертикального разреза скорости звука (Справочник по гидроакустике. А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. 2-е изд. - Л.: Судостроение, 1988, с. 24, 54-57; Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с. 26, 27).
Известны также активные гидролокаторы (об этом говорится в книгах: Из истории отечественной гидроакустики, СПб, 1998 г., с. 177; 50 лет ЦНИИ "Морфизприбор", СПб, 1999, с. 134, 139), работающие в режиме измерения дистанции до цели, в которых излучение и прием сигналов производится в направлении, поступающем от системы шумопеленгования.
Все известные активные гидролокаторы не имеют возможности быстрого определения навигационных параметров судна, включая его координаты, скорость, истинный курс и осадку в зоне действия ГАС.
Задачей изобретения является разработка конструкции активного гидролокатора, дистанционно работающего в режимах кругового/секторного обзора и измерения осадки судна с одновременной высокой скоростью сканирования, позволяющего определять пространственное положение корпуса судна.
Техническим результатом изобретения является упрощение конструкции гидролокатора и его эксплуатации, снижение его стоимости за счет использования в нем промышленно выпускаемых комплектующих и существующих алгоритмов обработки данных.
Поставленная задача и технический результат достигаются тем, что согласно изобретению активный гидролокатор, включает процессорный блок, приемо-передающий блок, соединительный кабель от процессорного к приемо-передающему блоку, антенный блок гидролокатора со встроенным сигнальным и управляющим кабелем, при этом приемо-передающий блок выполнен выносным и содержит две фазируемые антенные решетки, работающие в паре, одна из которых - излучающая с веерной диаграммой направленности, установлена внутри корпуса с возможностью вращения в горизонтальной плоскости вокруг оси, проходящей через ее геометрический центр, а другая - приемная антенная решетка, неподвижно закреплена на корпусе, и выполнена в виде кольца, охватывающего герметичный корпус, заполненный жидкостью, для компенсации гидростатического давления внешней среды. Кроме того, приемо-передающий блок содержит модуль передатчика, модуль приемника с оптическим модемом для преобразования мильтиплексированного электрического сигнала от приемной антенной решетки в оптический и блок питания для питания выносного приемо-передающего блока. Излучающая антенная решетка выполнена в виде фазированной линейной пьезокерамической решетки, а на дне герметичного корпуса с излучающей решеткой расположены предварительный усилитель, аналого-цифровой преобразователь, мультиплексор сигналов, оптический модем, электрический двигатель, приводящий излучающую решетку во вращение, и датчик угла поворота излучающей решетки.
Наличие процессорного блока позволяет управлять формированием излучаемых сигналов и передавать на приемо-передающий блок сигналы управления антенным блоком, принимать и демультиплексировать усиленные и оцифрованные сигналы приемной антенной решетки, поступающие от приемо-передающего блока. Процессорный блок является узлом, обрабатывающим сигналы и данные, а также играет роль управляющего интерфейса между оператором СУДС и гидролокатором. Процессорный блок гидролокатора также включает в себя и функции управления процессами ввода-вывода визуализации рельефа поверхности контролируемого сектора в каждом акте обзора (кадре), визуализации поперечного сечения корпуса судна, предварительной обработки полученных изображений рельефа (кадров), геокодирование и конвейерную передачу кадров изображений в СУДС, а также покадровую запись синтезированных изображений вместе с метками времени на встроенный либо внешний регистратор, что позволяет измерять текущие навигационные параметры судна, включая осадку и истинный курс, а также протоколировать изменения названных параметров в течение проводки судна.
Наличие соединительного кабеля обеспечивает связь сигнального и управляющего интерфейса между процессорным блоком и приемо-передающим блоком гидролокатора, что позволяет осуществлять обработку гидролокационных данных в удаленном на большое расстояние процессорном блоке, благодаря чему снижается энергопотребление приемоизлучающего блока, уменьшается вес соединительного кабеля благодаря использованию проводников меньшего сечения, и увеличиваются максимально допустимые расстояния, на которые приемо-передающий модуль может быть удален от процессорного блока обработки данных.
Приемо-передающий блок гидролокатора формирует электрические импульсы зондирующих сигналов и посылает их на передающую решетку, осуществляя преобразование мультиплексированных оптических сигналов от приемной антенны в электрические и передачу их в процессорный блок гидролокатора по соединительному кабелю между процессором и приемо-передающим блоком для последующей обработки. Кроме того, приемо-передающий блок передает по соединительному кабелю питающее напряжение и управляющие сигналы на антенный блок гидролокатора.
Оснащение выносного приемоизлучающего блока гидролокатора вращающимся направленным излучающим модулем, работающим в паре с неподвижной приемной антенной, позволяет многократно увеличивать скорости обзора по сравнению со скоростью обзора гидролокаторами, построенными по классическим схемам гидролокаторов кругового или бокового обзора.
Выполнение приемо-передающего блока выносным со встроенными сигнальным и управляющим кабелем позволяет передавать акустические импульсы в воду через излучающую антенную решетку и принимать отраженные акустические сигналы с помощью приемной кольцевой антенной решетки, усиливать, оцифровывать, мультиплексировать и посылать их на приемо-передающий блок по волоконно-оптической линии связи.
Предварительный усилитель предназначен для усиления сигналов, принимаемых приемной антенной решеткой. Аналого-цифровой преобразователь служит для преобразования аналоговых сигналов в цифровую форму. Мультиплексор позволяет одновременно передавать потоки цифровых данных от приемных каналов по одному каналу. Оптический модем предназначен для преобразования мультиплексированного цифрового электрического сигнала в оптический для последующей передачи в процессорный блок и обработки в этом блоке.
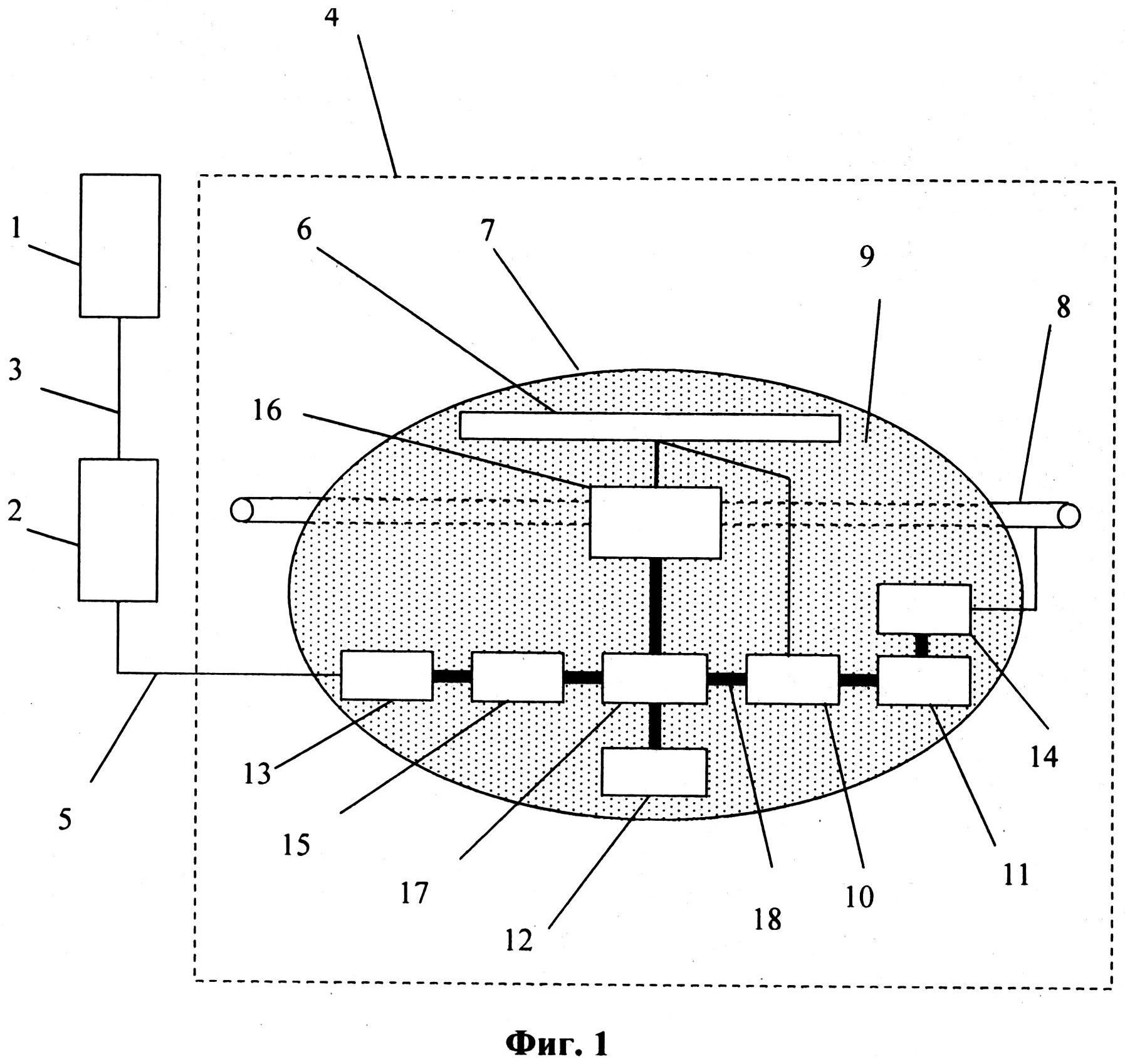
Изобретение поясняется чертежами, где на фиг. 1 - устройство приемоизлучающего блока, с сечениями вертикальной и горизонтальной плоскостей; на фиг. 2 - схема сканирования поверхности А, где значения β, γ и δ преувеличены для наглядности; на фиг. 3 - геометрия лучей при измерении величины осадки судна (сечение А-А изображено с искажением масштабов); на фиг. 4 - формирование зон обзора на поверхности воды при размещении приемоизлучающего блока вблизи поворота оси фарватера.
Активный гидролокатор включает процессорный блок 1, выполненный на платформе с архитектурой х86, приемо-передающий блок 2, соединительный кабель 3 от процессорного блока 1 к приемо-передающему блоку 2, обеспечивающий сигнальный и управляющий интерфейс между процессорным блоком 1 и приемо-передающим блоком 2 гидролокатора, антенный блок 4 гидролокатора со встроенным сигнальным и управляющим кабелем 5. Приемо-передающий блок 2 выполнен выносным и содержит две фазируемые антенные решетки, работающие в паре, одна из которых - излучающая антенная решетка 6 с веерной диаграммой направленности, установлена внутри корпуса 7 с возможностью вращения в горизонтальной плоскости, представляющая собой линейную пьезокерамическую решетку, а другая - приемная антенная решетка 8, выполнена в виде кольца и неподвижно закреплена на корпусе 7, который заполнен жидкостью 9 для компенсации гидростатического давления внешней среды. Приемо-передающий блок 2 гидролокатора содержит модуль передатчика 10, модуль приемника 11 и блока питания 12. Модуль приемника включает оптический модем 13 для преобразования мильтиплексированного оптического сигнала от приемной антенной решетки 8 в электрический сигнал. Блок питания 12 предназначен для питания выносного приемо-передающего блока 2. На дне герметичного корпуса 7 с излучающей антенной решеткой 6 смонтированы также предварительный усилитель со встроенным аналого-цифровым преобразователем 14, мультиплексор 15 сигналов, оптический модем 13 и электрический двигатель 16, приводящий излучающую решетку 6 во вращение, и управляемый модулем 17 управления, содержащим датчик угла поворота излучающей решетки 6. Выносной приемо-передающий блок 2 соединен с расположенным на береговом посту приемо-передающим блоком кабелем требуемой длины, подающим питание на входящие в состав приемо-передающий блок 2 электрические устройства, а также содержит (на чертежах не показано) управляющий кабель, сигнальный кабель, по которому передаются излучаемые излучающей антенной решеткой 6 и принимаемые кольцевой приемной антенной решеткой 8, волоконно-оптическую линию, по которой в приемо-передающий блок 2 передаются предварительно усиленные и мультиплексированные сигналы с приемной антенны 8, а также информация об угле поворота излучающей антенны 6. Электронные блоки приемо-передающего блока 2 соединены между собой шиной 18.
Активный гидролокатор работает следующим образом.
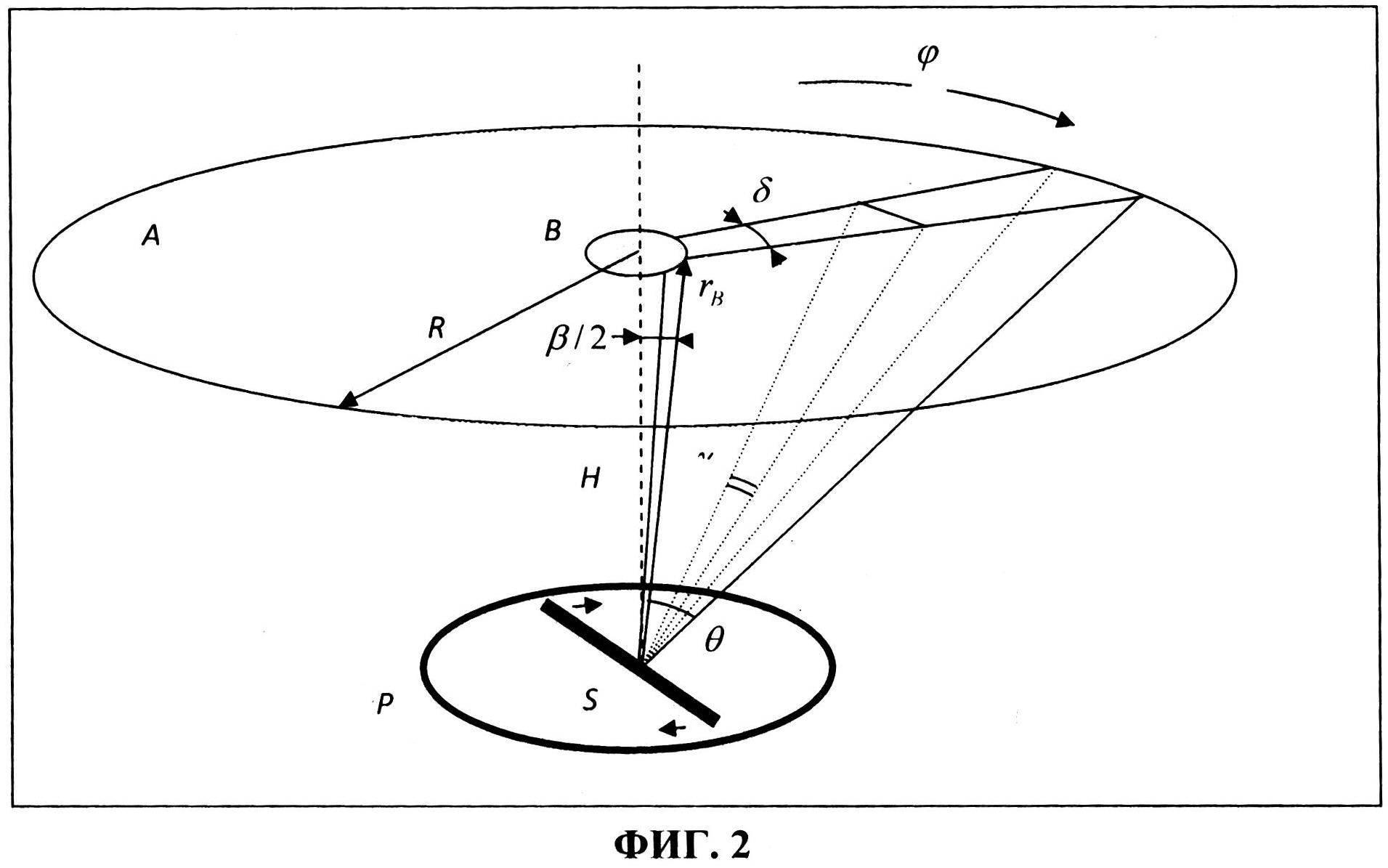
Один из возможных вариантов реализации предлагаемого технического решения состоит в использовании излучающей антенной решетки 6 с веерной диаграммой направленности (возможно использование излучающих антенн от промышленно выпускаемых ГБО) в соответствии с показанной на фиг. 2 схемой, в которой излучающая антенна 6 развернута вокруг собственной оси на 180° (по отношению к используемой в ГБО ориентации) и приводится во вращение в горизонтальной плоскости относительно вертикальной оси, проходящий через ее геометрический центр, где:
А - зона сканирования,
R - радиус зоны сканирования,
В - мертвая зона приемо-передающего блока 2,
S - линейный излучатель приемо-передающего блока 2,
Н - глубина установки приемоизлучающего блока,
θ - угол раскрыва веера диаграммы направленности,
β - угловой размер мертвой зоны,
γ - ширина диаграммы направленности излучателя,
φ - азимутальный угол.
Угловая ширина сектора сканирования на поверхности составляет

Приемная антенна 8 в предлагаемой конструкции приемоизлучающего блока 2 неподвижна и выполнена в виде кольца, охватывающего периметр неподвижного корпуса 7 (фиг. 1), внутри которого размещена вращающаяся линейная излучающая антенна 6. Внутренний объем корпуса 7 заполнен жидкостью для компенсации гидростатического давления внешней среды при установке устройства под водой.
Использование фазированных излучающей 6 и приемной 8 антенн обеспечивает необходимую пространственную селективность системы в целом, позволяя разделять эхо-сигналы, пришедшие с различных азимутальных углов, совершенно аналогично тому, как это делается при приеме эхо-сигналов в обычных гидролокаторах бокового обзора при поступательном движении приемоизлучающего модуля.
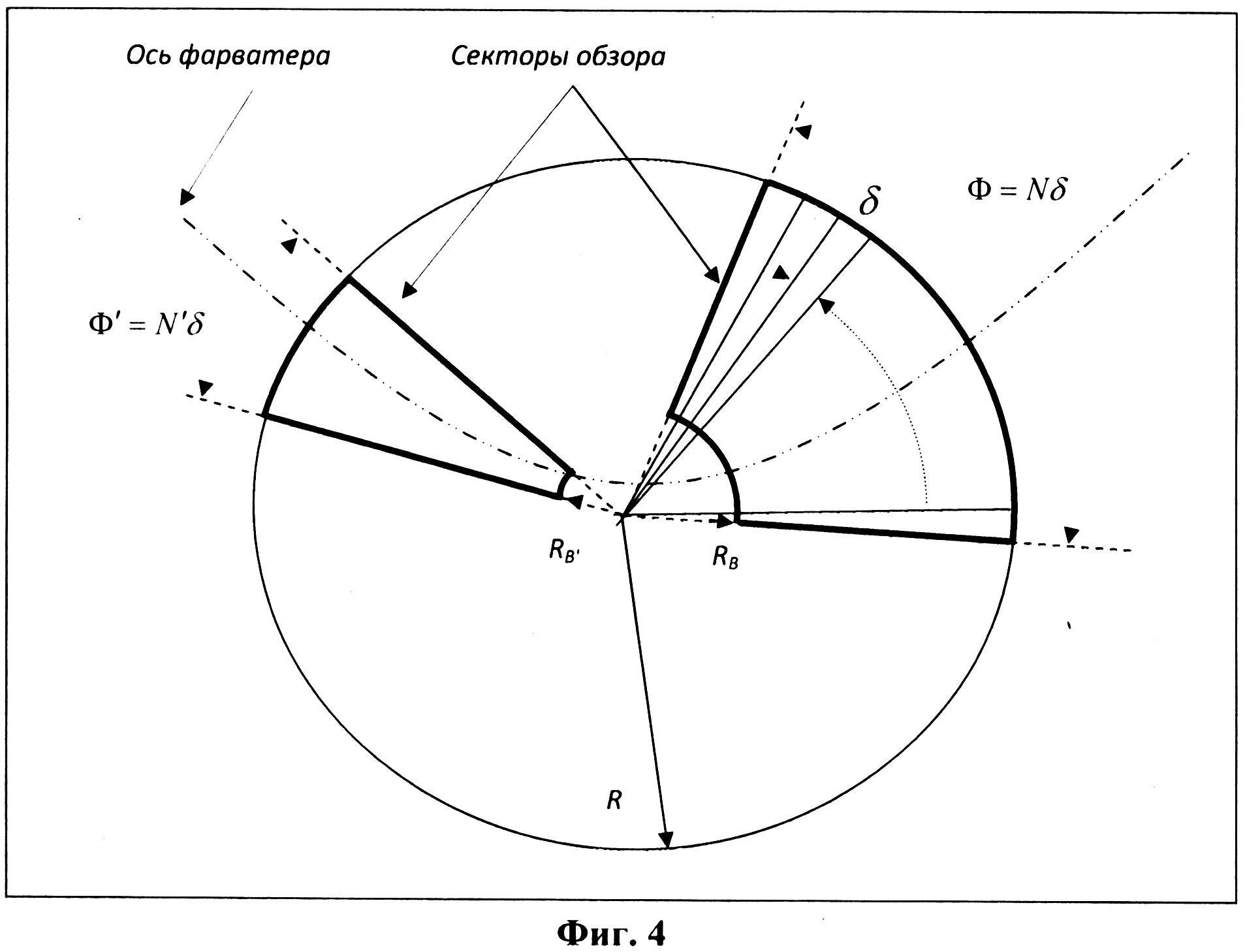
Благодаря аксиальной симметрии конструкции приемоизлучающего блока 2, гидролокатор может использоваться как в режиме секторного, так и кругового обзора. Конструкция гидролокатора также позволяет в одном акте обзора (т.е. за один полный поворот излучающей антенны 6) производить сканирование произвольного числа отдельных, несмежных секторов поверхности. Одновременное сканирование нескольких секторов осуществляется за счет управления режимом излучения зондирующих акустических импульсов и соответствующей обработкой принимаемых отраженных сигналов. Возможность одновременного сканирования нескольких секторов поверхности позволяет вдвое, по сравнению с режимом односекторного обзора, увеличить эффективную дальность системы, например, при ее установке в месте поворота оси фарватера (фиг. 4). В данной ситуации гидролокатор позволяет одновременно контролировать несмежные секторы поверхности в двух направлениях по обе стороны от точки поворота оси фарватера. Величины углов обзора в одновременно контролируемых секторах поверхности могут быть различными, как это показано на фиг. 4.
Активный гидролокатор предлагаемой конструкции предназначен для поиска надводных судов в контролируемой зоне морской поверхности. В ходе выполнения поиска гидролокатор обеспечивает:
- гидролокационный поиск крупногабаритных протяженных объектов на поверхности воды в заданном секторе обзора;
- определение координат, ориентации и осадки обнаруженных на поверхности крупногабаритных объектов (надводных судов).
Работа гидролокатора в режиме сканирования поверхности.
Излучающая антенна 6 гидролокатора равномерно вращается в горизонтальной плоскости, в последовательные моменты времени излучает короткие зондирующие сигналы длительности τ в каждый элементарный сектор направлений δ, ширина которого определяется шириной веерной диаграммы направленности излучателя в горизонтальной плоскости (фиг. 4). При использовании промышленных образцов излучающей решетки со средней рабочей частотой 100 кГц, длительность зондирующего сигнала обычно выбирается в интервале от 0.2 до 1 мс. Полное время работы излучающей антенны 6 по сектору обзора Ф составляет
ТФ=τФ/δ,
где τ - длительность одного зондирующего сигнала.
Когда работа излучающей антенны 6 по выбранному сектору обзора закончена, излучающая решетка отключается. В свою очередь, на время работы излучающей антенны 6 отключается приемная антенна 8, что приводит к образованию мертвой зоны непосредственно в окрестности приемоизлучающего блока гидролокатора. Радиальный размер мертвой зоны по наклонной дальности определяется временем отключения приемной антенны 8 и равен, при сканировании одного сектора,
rB=сτФ/δ,
где с - скорость звука в воде.
Соответствующий радиальный размер мертвой зоны на поверхности воды составляет
 , если rB>H
, если rB>H
RB=0, если rB<Н,
где H - глубина установки приемоизлучающего блока под водой.
Время, за которое излучающая антенна 6 совершает один полный оборот на 360° вокруг своей оси, равен:
Т360=2πτ/δ.
Длительность одного акта обзора (сканирования поверхности) при любом количестве и конфигурации выбранных секторов обзора, включающая время работы излучающей антенны 6 по заданным секторам поверхности и последующий прием рассеянных сигналов, составляет
Тобзора=Т360+2R/c,
 ,
,
где R - наклонная дальность до наиболее удаленной точки контролируемого участка поверхности, R - радиальный размер наибольшего сектора обзора, с - скорость звука.
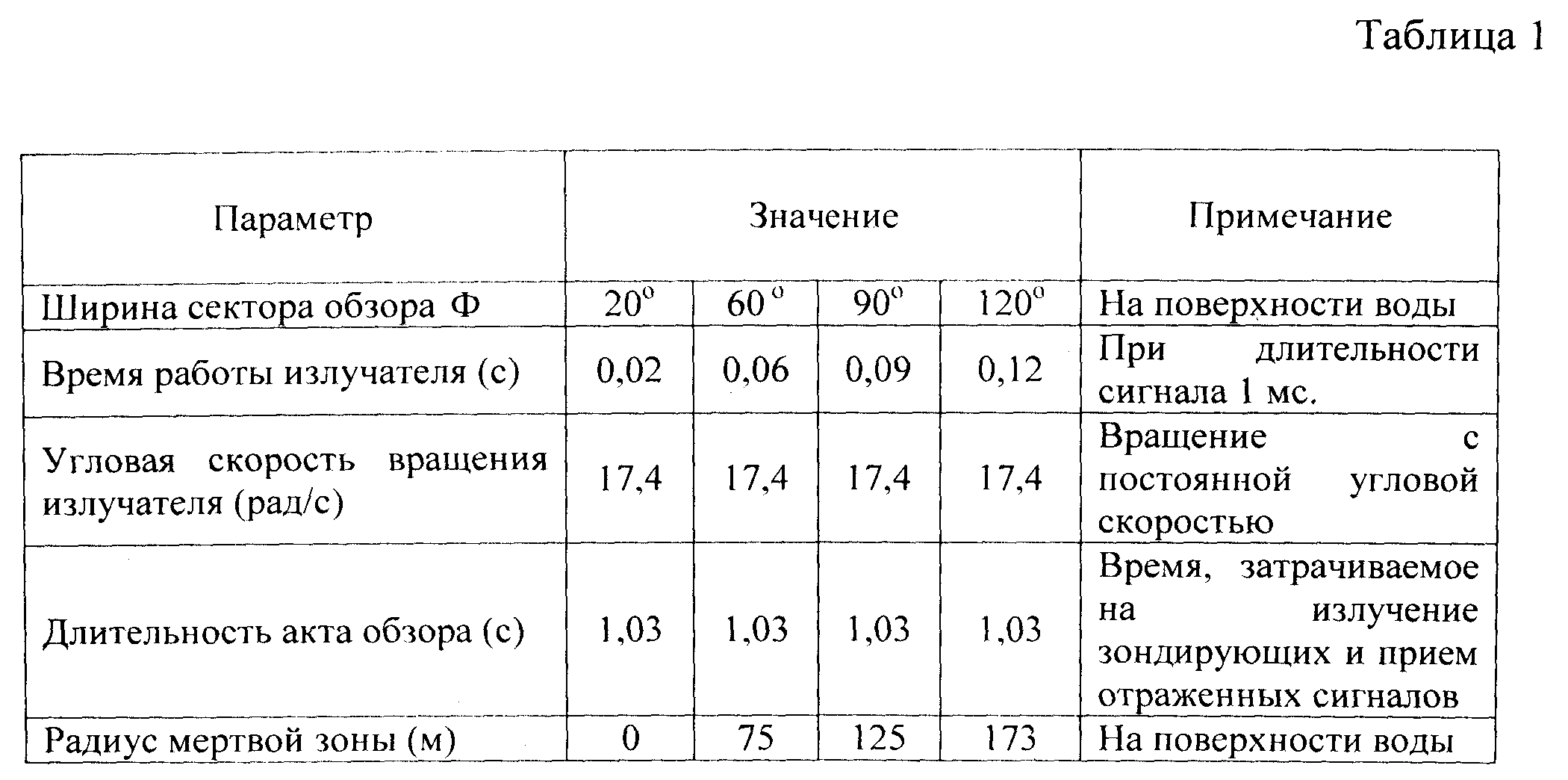
Характерные времена работы системы при типовых значениях параметров R=500 м, Н=50 м, τ=1 мс, с=1500 м/с, δ=1° приведены в таблице 1.
Последовательное сканирование узких угловых секторов δ (величина δ определяется шириной диаграммы направленности излучающей антенны 6 в горизонтальной плоскости и для промышленных образцов составляет не более 1° на частотах 100 кГц) формирует изображение морской поверхности в заданном секторе обзора Ф=Nδ, которое используется для локализации и измерения навигационных параметров расположенного на ней судна.
Каждый зондирующий акустический импульс используется для формирования радиальной строки данных в полярных координатах (R,φ). Каждая строка данных содержит ряд амплитуд отраженного сигнала в элементарном секторе δ в азимутальном направлении φ в функции радиального расстояния R до рассеивающего элемента поверхности. Высокие амплитуды отвечают сильному рассеянию в обратном направлении, в т.ч. обусловленному рассеянием на корпусе судна. Низкие амплитуды отвечают рассеянию на затененных подводной частью корпуса судна участках поверхности. Полученные в заданном секторе обзора Ф=Nδ радиальные строки данных объединяются и отображаются в полярной системе координат, формируя двумерное изображение морской поверхности в секторе обзора. Данные сканирования выводятся в виде двумерного массива значений амплитуд, элементы которого представляют собой набор амплитуд от различных участков поверхности в пределах контролируемого сектора. Размер этих элементарных участков поверхности определяется величиной радиального и латерального пространственного разрешения системы. Разделение сигналов, рассеянных различными участками поверхности в латеральном (азимутальном) направлении осуществляется на основе направленных свойств приемной кольцевой антенны 8. Угловое разрешение системы в латеральном направлении также равно δ и составляет не более 1°. Разделение сигналов, рассеянных различными участками поверхности в радиальном направлении осуществляется на основе измерения задержек сигналов, принятых в выбранном азимутальном направлении. Величина радиального разрешения ΔR составляет не меньше 10-20 см по наклонной дальности при использовании промышленных образцов излучающих антенных решеток и зондирующих сигналов со средней частотой порядка 100 кГц (линейные размеры таких решеток при этом не превышают 1 м). В результате, значения амплитуд в формируемом двумерном массиве данных представляют собой акустический образ сканируемого сектора поверхности, составленного из мозаики с размером элементов ΔR×δ в полярных координатах. Данные об амплитудах, собранные в каждом акте обзора, подвергаются геокодированию на основе оперативных данных о текущей гидрологии для учета искривления звуковых лучей и передаются в СУДС, где они подвергаются дальнейшей обработке и отображаются (визуализируются) на дисплее оператора, который принимает решение о возможности их использования для определения навигационных параметров судна.
Работа гидролокатора в режиме определения осадки судна
Оперативные данные о величине осадки проводимого судна позволяют уточнять границы зоны безопасного плавания в зависимости от рельефа дна и глубины расположения подводных препятствий в зоне проводки судна.
Поскольку измерения осадки требуют повышенной точности, они должны проводиться в период наибольшего сближения судна с гидролокатором, когда величина латерального разрешения по расстоянию близка к своему максимальному значению. Оценка величины осадки производится на основании гидролокационных данных, получаемых в режиме сканирования поверхности, однако алгоритм их обработки принципиально отличается от используемого в режиме сканирования поверхности и опирается на учет акустических "бликов", возникающих на подводной части корпуса судна в моменты, когда гидролокатор находится на траверзе борта судна.
Как следует из очевидных геометрических соображений, при любой величине истинного курса судна, минующего гидролокатор, на линии пути всегда найдется, по крайней мере, одна точка, в которой хотя бы одно из азимутальных направлений сканирования окажется ортогональным к борту судна (фиг. 3). В этой ситуации существуют, по крайней мере, два направления (лучи 1 и 2 на фиг. 3), в которых акустический сигнал испытает зеркальное отражение в обратном направлении на корпусе судна и, следовательно, будет характеризоваться аномально высоким уровнем в точке приема (по сравнению с сигналами, испытавшими обычное обратное рассеяние по другим направлениям). Сигнал по лучу 1 будет зеркально отражен в обратном направлении на границе действующей ватерлинии с корпусом судна благодаря эффекту "уголкового отражателя", а сигнал по лучу 2 испытает зеркальное отражение в обратном направлении от корпуса судна в точке, положение которой будет зависеть от величины осадки, формы обвода и расположения излучателя относительно линии пути. Луч 3 также может испытать зеркальное отражение в обратном направлении за счет эффекта "уголкового отражателя", правда, это будет иметь место только для судов с наружным килем (который обычно отсутствует у больших судов). Луч 4 формирует границу области тени при визуализации данных, поскольку лучи с большими углами падения в вообще не испытывают рассеяния на корпусе судна.
Определение осадки судна заключается в визуализации линии обвода Г1Г2Г3Г4 поперечного сечения корпуса судна и основано на измерении времен и углов прихода сигналов, рассеянных корпусом судна, а также используется момент прихода интенсивного "траверзного" зеркального блика от корпуса (по лучу 1 или 2) в качестве временного строба, определяющего момент начала проведения измерений.
Режим работы гидролокатора и алгоритм обработки данных в задаче измерения осадки судна в целом идентичны рассмотренным выше для режима сканирования поверхности с той, однако, разницей, что в данном случае измерения производятся не в горизонтальной плоскости, а в вертикальной плоскости с полярными координатами (r,θ), а их результатом является массив данных, являющийся акустическим образом поперечного сечения корпуса судна и позволяющий определить величину осадки по положению изображения этого сечения относительно известного уровня поверхности воды.
Активный гидролокатор совместил в себе гидролокатор с боковым и круговым обзором и, с технической точки зрения, решена проблема определения навигационных параметров судна, включая его истинный курс и осадку. Кроме того, за счет использования линейной излучающей фазированной решетки с веерной диаграммой направленности достигается большая, по сравнению с использованием ненаправленного источника зондирующих сигналов, дальность действия гидролокатора, а за счет вращения излучающей решетки достигается многократное увеличение скорости сканирования благодаря возможности разделения зондирующих сигналов по азимутальным углам, что повышает эксплуатационные характеристики гидролокатора. Кроме того, за счет возможности использования в конструкции гидролокатора промышленно выпускаемых комплектующих снижена его стоимость, а за счет использования существующих алгоритмов обработки данных, с незначительной их доработкой, упрощается эксплуатация.
В настоящее время активный гидролокатор находится на стадии технического предложения.

Автоматизированная система связи
Способ изготовления спиралевидного многогранного змеевика теплообменника из толстостенных жаропрочных труб
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Способ построения автоматизированной системы, реализующей принципы виртуализации рабочих мест и изоморфного масштабирования
Способ построения иерархической системы сетевого взаимодействия виртуальных рабочих мест
Устройство для формирования траектории перевода судна на новый курс
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Автоматизированная система связи
Способ изготовления спиралевидного многогранного змеевика теплообменника из толстостенных жаропрочных труб
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Способ построения автоматизированной системы, реализующей принципы виртуализации рабочих мест и изоморфного масштабирования
Способ построения иерархической системы сетевого взаимодействия виртуальных рабочих мест
Устройство для формирования траектории перевода судна на новый курс
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Способ чистовой обработки зубьев эвольвентных шлицевых валов

