Результат интеллектуальной деятельности: СОВМЕЩЕНИЕ И НАВИГАЦИЯ ДЛЯ ЭНДОСКОПИЧЕСКОЙ ХИРУРГИИ НА ОСНОВЕ ИНТЕГРАЦИИ ИЗОБРАЖЕНИЙ
Вид РИД
Изобретение
Настоящее изобретение относится, в общем, к отслеживанию в реальном времени хирургических инструментов внутри анатомической области тела относительно предоперационного плана и интраоперационных изображений. Настоящее изобретение относится, в частности, к интеграции предоперационных сканированных изображений, интраоперационных флюороскопических изображений и интраоперационных эндоскопических изображений для отслеживания и определения местоположения хирургических инструментов.
Минимально инвазивная эндоскопическая хирургическая операция является хирургической операцией, во время которой жесткий или гибкий эндоскоп вводят в тело пациента через естественное отверстие или небольшой разрез в коже (т.е. порт). Дополнительные хирургические инструменты вводят в тело пациента через аналогичные порты с эндоскопом, применяемым для обеспечения визуальной обратной связи для хирурга, работающего с хирургическими инструментами, относительно хирургического поля.
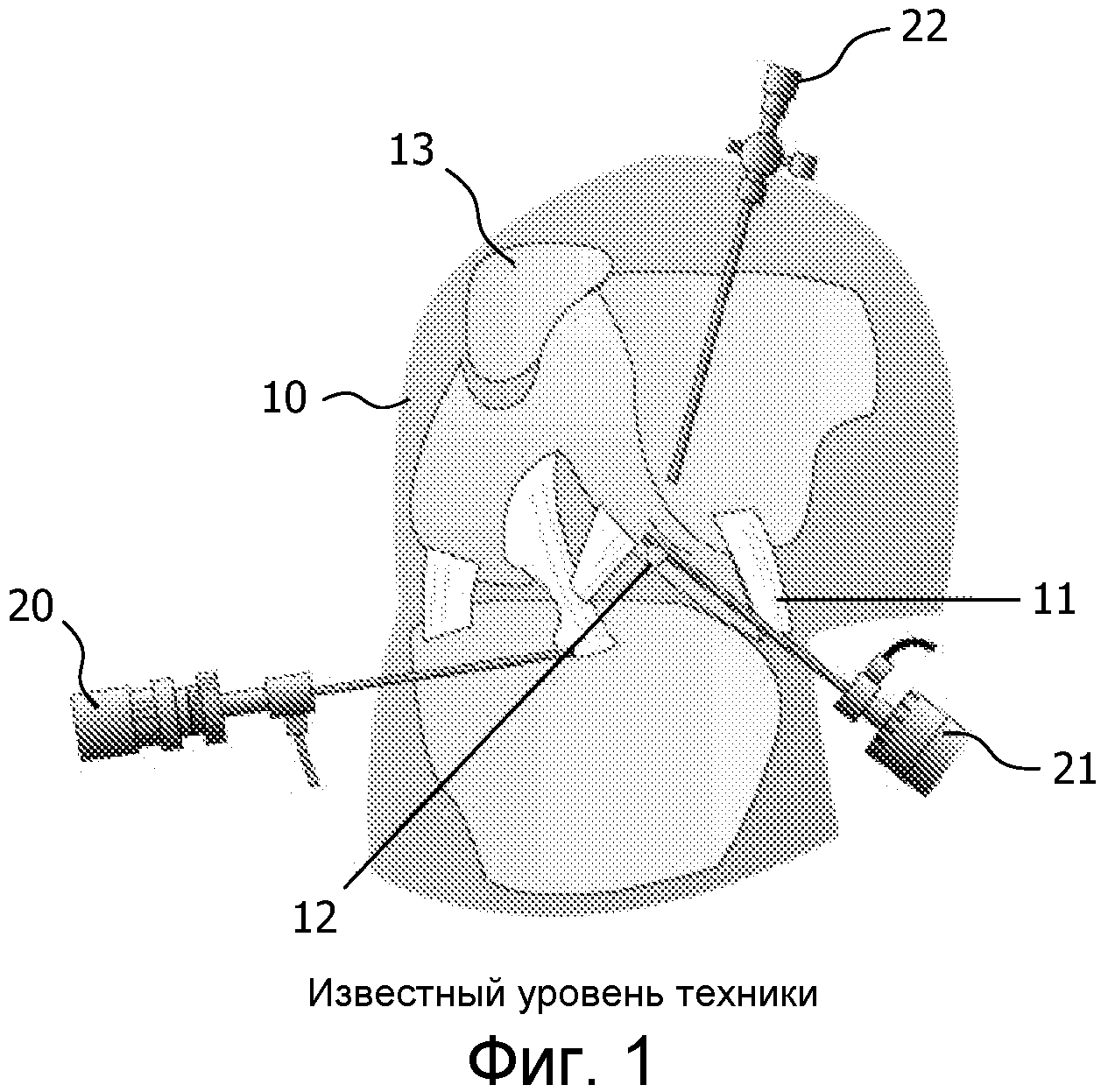
Например, на фиг. 1 схематически показана артроскопическая хирургическая операция на передней крестообразной связке («ACL») колена 10, в котором показаны связка ACL 11, хрящ 12 и надколенная чашечка 13. Артроскопическая хирургическая операция содержит предоперационную фазу и интраоперационную фазу.
Предоперационная фаза включает в себя формирование трехмерного («3-мерного») сканированного изображения колена 10 (например, КТ-изображения (полученного методом компьютерной томографии), МРТ-изображения (полученного методом магнитно-резонансной томографии), ультразвукового изображения, рентгеновского изображения и т.п.) для диагностического исследования колена 10 и для планирования артроскопической хирургической операции на связке ACL колена 10.
Интраоперационная фаза включает в себя введение артроскопа 20 (т.е. эндоскопа для суставов) через порт в передней зоне колена 10 таким образом, что артроскоп 20 можно перемещать и/или поворачивать для получения в реальном времени изображений различных областей колена 10, в частности связки ACL 11 и поврежденной зоны хряща 12. Кроме того, через порт в задней зоне колена 10 вводят ирригационный инструмент 22 и через порт в передней зоне колена 10 вводят различные хирургические инструменты типа режущего инструмента 21, под углом, перпендикулярным углу наблюдения артроскопа 20, чтобы облегчить визуализацию операционного поля для поврежденного хряща 12.
До создания настоящего изобретения существовало два основных подхода к отслеживанию положений и ориентации хирургических инструментов 20-22.
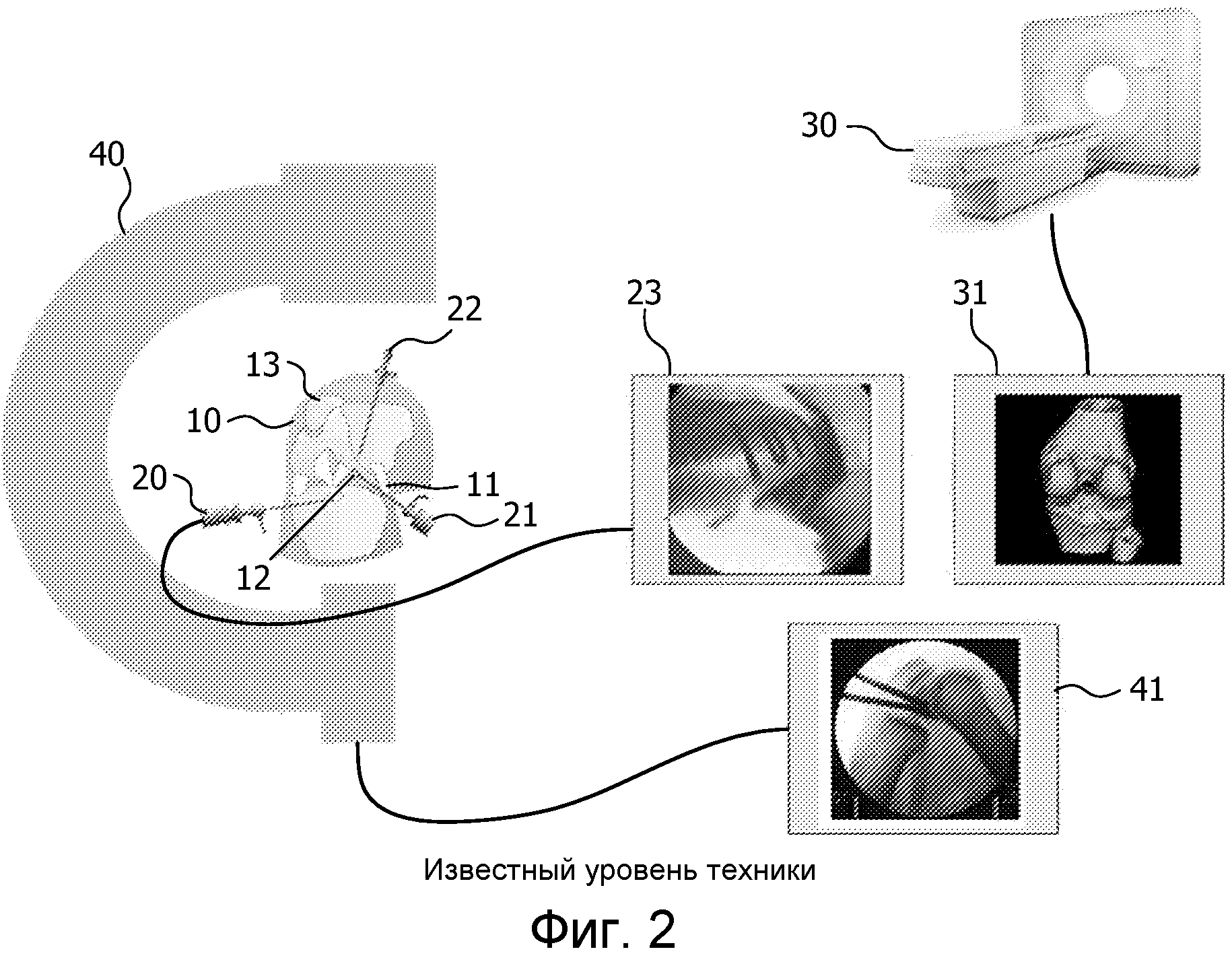
Первый подход представляет собой ручной метод без навигации, в соответствии с которым хирург наблюдает операционное поле с помощью трех (3) разных средств. Например, как показано на фиг. 2, для получения предоперационного сканированного КТ-изображения 31 в целях диагностики и планирования оперативного вмешательства применяют КТ-сканер (компьютерный томографический сканер) 30. Рентгеновское устройство 40 применяют для получения по меньшей мере одного интраоперационного двумерного («2-мерного») флюороскопического изображения, подобного примерному изображению 41, для наблюдения положения и ориентации по меньшей мере одного хирургического инструмента 20-22 относительно колена 10. Артроскоп 20 применяют для повторяющегося получения интраоперационных артроскопических изображений, например примерного изображения 23, для наблюдения хирургического поля колена 10.
Хирург может просматривать изображения на разных экранах дисплея или одном экране дисплея. В любом случае приведенный подход не способен установить взаимосвязь между изображениями, которая облегчает отслеживание положений и ориентаций по меньшей мере одного хирургического инструмента 20-22 относительно колена 10, в частности операционного поля колена 10.
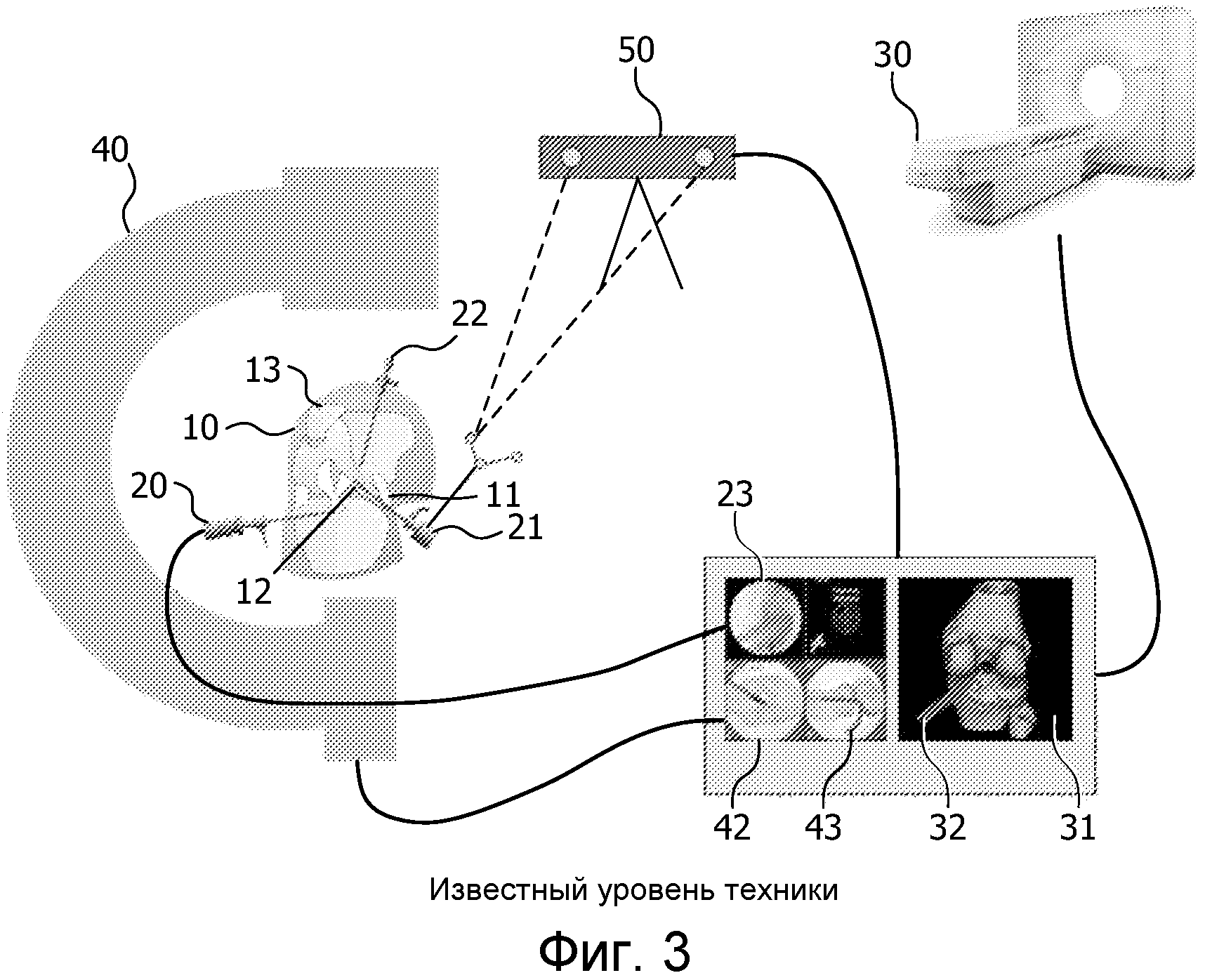
Вторым подходом является хирургическая операция с навигационной поддержкой, которая решает проблему отслеживания положений и ориентаций по меньшей мере одного хирургического инструмента 20-22 относительно колена 10 путем применения внешних систем отслеживания положения. Например, на фиг. 3 показана оптическая следящая система 50 для отслеживания положений и ориентаций режущего инструмента 21 в системе координат следящей камеры системы 50, вследствие чего необходимо выполнять процедуру совмещения пациента, чтобы представлять режущий инструмент 21 в виде накладок на сканированное изображение и флюороскопическое(ие) изображение(ия), подобно примерным накладкам 32 и 43, в соответствующих системах координат сканированного изображения 31 и флюороскопических изображений 42. Совмещение может использовать опорные метки, которые заметны на флюороскопических изображениях 42 и которые прикрепляют к коже или кости пациента и ощущаются режущим инструментом 21. В альтернативном варианте возможно выполнение совмещения без меток, с применением сканированного КТ-изображения 31 и флюороскопических изображений 42.
Второй подход, как показано на фиг. 3, снабжает хирурга обратной связью в реальном времени по положениям и ориентациям режущего инструмента 21 относительно колена 10 и предоперационного плана. Однако применение оптической следящей системы 50 или альтернативной внешней следящей системы (например, электромагнитной следящей системы) увеличивает время хирургической операции из-за совмещения пациента, не позволяет отслеживать все инструменты 20-22 и может дополнительно создавать для хирурга физические ограничения на перемещение (например, следует всегда поддерживать линию прямой видимости между системой 50 и режущим инструментом 21).
В соответствии с настоящим изобретением предлагается отслеживание в реальном времени хирургических инструментов относительно предоперационного плана и интраоперационных изображений, при этом упомянутое отслеживание предусматривает совмещение по изображениям и отслеживание инструмента. Совмещение по изображениям осуществляет интеграцию множества изображений анатомической области тела, содержащих предоперационное сканированное изображение (например, 3-мерное КТ/МРТ-изображение), интраоперационное флюороскопическое изображение (например, 2-мерное рентгеновское изображение) и интраоперационное эндоскопическое изображение (например, 2-мерное артроскопическое изображение). Отслеживание инструментов осуществляет представление, в пределах предоперационного сканированного изображения и/или интраоперационного флюороскопического изображения, отслеживания, по меньшей мере, хирургического инструмента при посредстве интраоперационного эндоскопического изображения.
Одним из вариантов осуществления настоящего изобретения является хирургическая навигационная система для интеграции множества изображений анатомической области тела, содержащих предоперационное сканированное изображение (например, 3-мерное КТ/МРТ-изображение), интраоперационное флюороскопическое изображение (например, 2-мерное рентгеновское изображение) и интраоперационное эндоскопическое изображение (например, 2-мерное артроскопическое изображение). Хирургическая навигационная система содержит блок интеграции изображений и блок отслеживания инструмента. Во время работы блок интеграции изображений формирует интегрированную матрицу изображения, содержащую интеграцию (например, мультипликацию матриц) матрицы флюороскопического изображения и матрицы эндоскопического изображения, при этом матрица флюороскопического изображения содержит преобразование между интраоперационным флюороскопическим изображением и предоперационным сканированным изображением, и причем матрица эндоскопического изображения содержит преобразование между предоперационным сканированным изображением и интраоперационным эндоскопическим изображением. В свою очередь, блок отслеживания инструментов формирует интегрированную матрицу слежения, при этом интегрированная матрица слежения содержит интеграцию (например, мультипликацию матриц) интегрированной матрицы изображения и матрицы эндоскопического слежения, причем матрица эндоскопического слежения представляет отслеживание хирургического инструмента в пределах интраоперационного эндоскопического изображения.
Отслеживание инструментов может дополнительно или, в качестве альтернативы, формировать матрицу сканированного слежения, при этом матрица сканированного слежения содержит интеграцию (например, мультипликацию матриц) матрицы эндоскопического изображения и матрицы эндоскопического слежения.
В целях настоящего изобретения, термин «формирование», в контексте настоящей заявки, установлен, в широком смысле, для включения в себя любого метода, который известен в настоящее время или получит известность в дальнейшем в области техники создания, обеспечения, предоставления, получения, выработки, формирования, разработки, выделения, видоизменения, преобразования, изменения или иного предоставления информации (например, данных, текста, изображений, речевой и видео информации) в целях компьютерной обработки и хранения/поиска в памяти, в частности, наборов данных изображений и видеокадров, и термин «совмещение», в контексте настоящей заявки, установлен, в широком смысле, для заключения в себе любого метода, который известен в настоящее время или получит известность в дальнейшем в области техники преобразования разных наборов данных изображений в одну систему координат.
Кроме того, термин «предоперационный», в контексте настоящей заявки, установлен, в широком смысле, для описания любого действия, происходящего или относящегося к периоду или подготовительным работам перед выполнением эндоскопической задачи, (например, планирование траектории для эндоскопа), и термин «интраоперационный», в контексте настоящей заявки, установлен, в широком смысле, для описания любого действия, происходящего, выполняемого или встречающегося в процессе выполнения эндоскопической задачи (например, управление эндоскопом в соответствии с запланированной траекторией). Примеры выполнения эндоскопической задачи содержат, но без ограничения, артроскопию, бронхоскопию, колоноскопию, лапароскопию, эндоскопию головного мозга и эндоскопическую хирургическую операцию на сердце. Примеры эндоскопической хирургической операции на сердце содержат, но без ограничения, эндоскопическое шунтирование коронарных артерий, эндоскопические восстановление и замену митрального и аортального клапанов.
В большинстве случаев, предоперационные действия и интраоперационные действия будут происходить в четко раздельные периоды времени. Тем не менее, настоящее изобретение охватывает случаи, включающие в себя любую степень перекрытия предоперационного и интраоперационного периодов времени.
Кроме того, термин «эндоскопический», в контексте настоящей заявки, применяется в широком смысле, для описания характера изображений, полученных эндоскопом любого типа, обладающим способностью визуализации тела изнутри, и термин «флюороскопический» установлен, в широком смысле, для описания характера изображений, полученных флюороскопом любого типа, обладающим способностью обеспечения изображений реального времени внутренних структур тела. Примеры эндоскопа для настоящего изобретения содержат, но без ограничения, наблюдательное устройство любого типа, гибкое или жесткое (например, эндоскоп, артроскоп, бронхоскоп, холедохоскоп, колоноскоп, цистоскоп, дуоденоскоп, гастроскоп, гистероскоп, лапароскоп, ларингоскоп, нейроскоп, отоскоп, активный энтероскоп, риноларингоскоп, сигмоидоскоп, синускоп, тораскоп или т.п.) и любое устройство, аналогичное наблюдательному устройству, которое оборудовано системой формирования изображений, (например, телескопической канюлей с возможностью визуализации). Визуализация является локальной, и изображения поверхности можно получать оптически с помощью волоконной оптики, линз или миниатюрных систем визуализации (например, на основе ПЗС (приборов с зарядовой связью)). Примеры флюороскопа для достижения целей настоящего изобретения содержат, без ограничения, рентгеновскую систему визуализации.
Вышеописанный вариант осуществления и другие варианты осуществления настоящего изобретения, а также различные признаки и преимущества настоящего изобретения станут более понятными после прочтения и изучения нижеследующего подробного описания вариантов осуществления настоящего изобретения, приведенного в сочетании с прилагаемыми чертежами. Подробное описание и чертежи являются только пояснением к настоящему изобретению, а не ограничивают его, при этом объем настоящего изобретения определяется прилагаемой формулой изобретения и ее эквивалентами.
Фиг. 1 - схематическое представление артроскопической хирургической операции ACL (передней крестообразной связки), известной в данной области техники.
Фиг. 2 - изображение примерной артроскопической хирургической операции связки ACL, без хирургической навигации, известной в данной области техники.
Фиг. 3 - изображение примерной артроскопической хирургической операции связки ACL, с хирургической навигацией, известной в данной области техники.
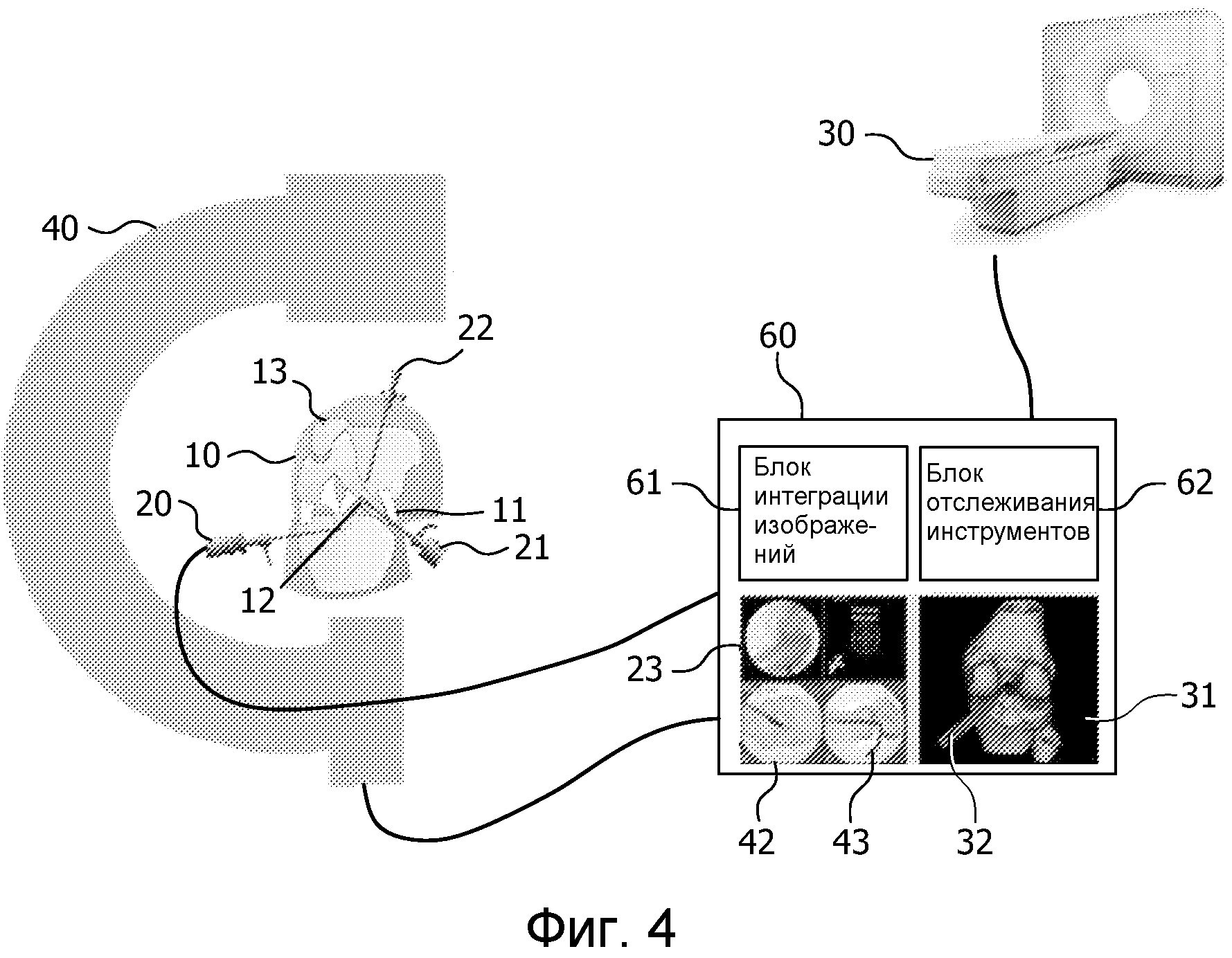
Фиг. 4 - изображение примерной артроскопической хирургической операции связки ACL, с хирургической навигацией в соответствии с примерным вариантом осуществления хирургической навигационной системы в соответствии с настоящим изобретением.
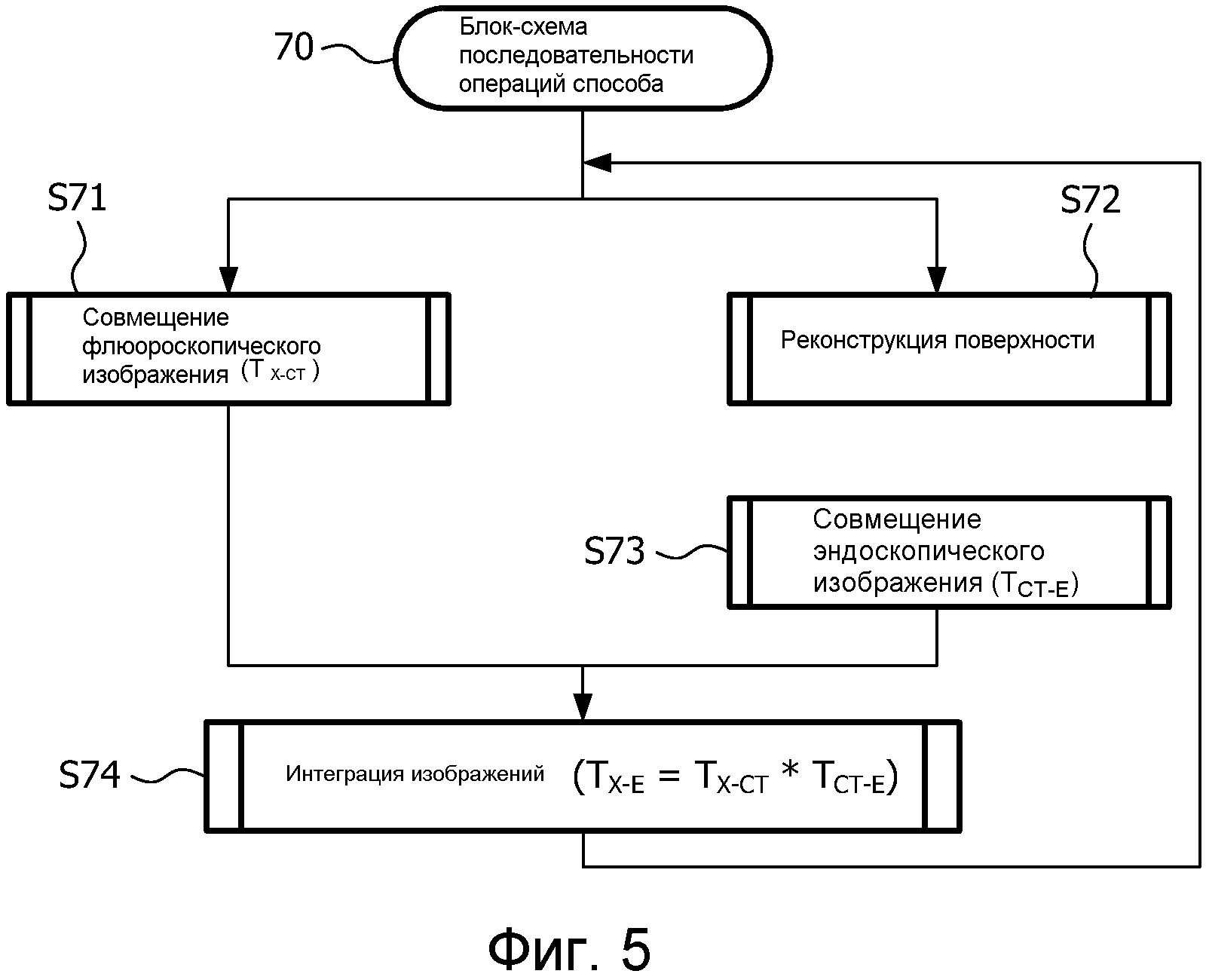
Фиг. 5 - блок-схема последовательности операций способа, представляющая примерный вариант осуществления способа интеграции изображений в соответствии с настоящим изобретением.
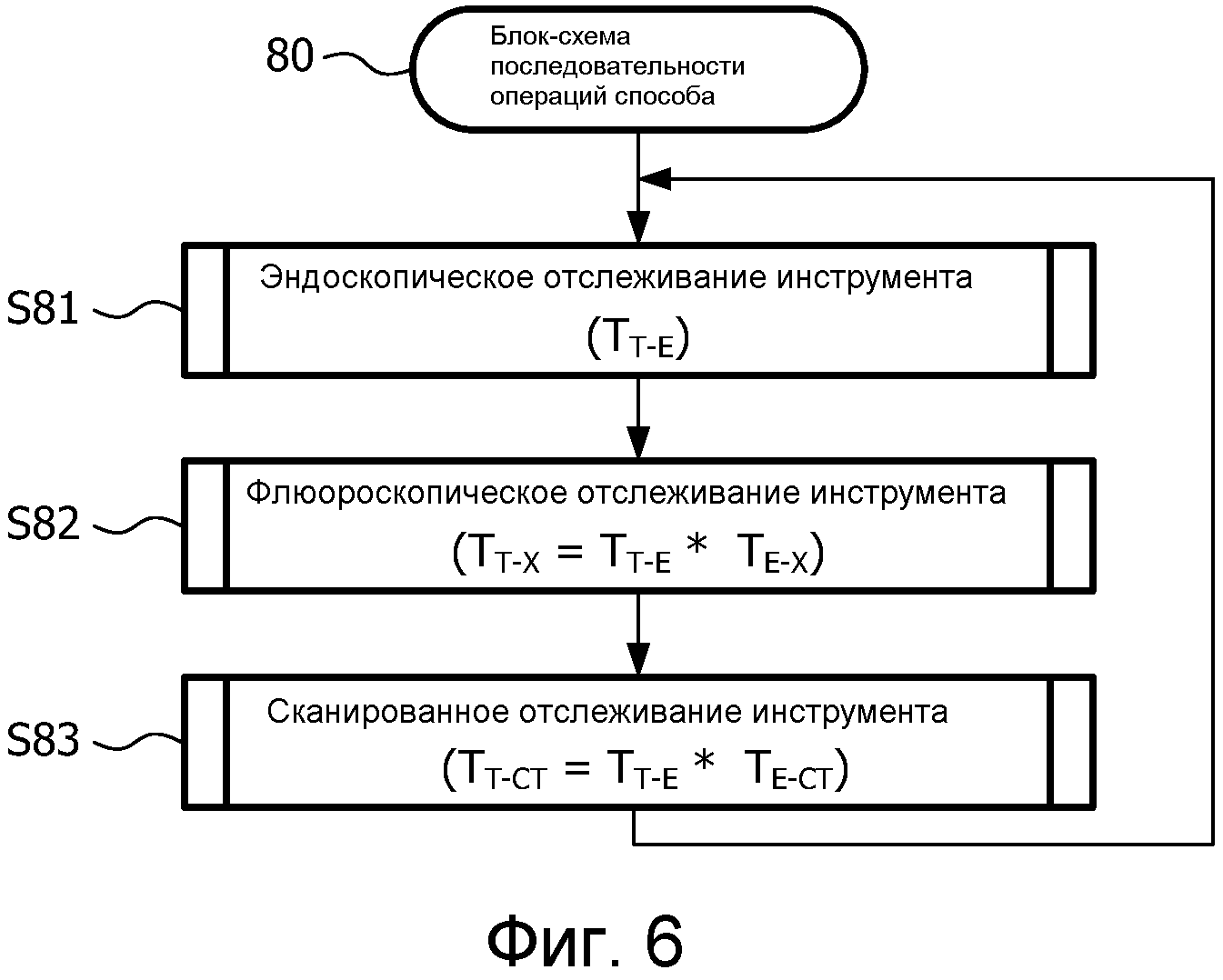
Фиг. 6 - блок-схема последовательности операций способа, представляющая примерный вариант осуществления способа отслеживания инструментов в соответствии с настоящим изобретением.
Фиг. 7 - блок-схема последовательности операций способа, представляющая примерный вариант осуществления способа хирургической навигации в соответствии с настоящим изобретением.
Как показано на фиг. 4, хирургическая навигационная система 60 в соответствии с настоящим изобретением для отслеживания в реальном времени хирургических инструментов относительно предоперационного плана хирургической операции и интраоперационных изображений, при этом упомянутое отслеживание предусматривает совмещение по изображениям и отслеживание инструмента. Для решения упомянутых задач система 60 содержит блок 61 интеграции изображений, блок 62 отслеживания инструментов и устройство отображения для изображения изображений 23, 31, 43. Блок 61 интеграции изображений определяется, в широком смысле, в настоящей заявке, как любое устройство, конструктивно сконфигурированное для исполнения совмещения по изображениям, включающее в себя интеграцию множества изображений анатомической области тела, содержащих предоперационное сканированное изображение (например, 3-мерное КТ/МРТ-изображение), интраоперационное флюороскопическое изображение (например, 2-мерное рентгеновское изображение) и интраоперационное эндоскопическое изображение (например, 2-мерное артроскопическое изображение). Блок 62 отслеживания инструментов определяется, в широком смысле, в настоящей заявке как любое устройство, конструктивно сконфигурированное для исполнения отслеживания инструментов, включающее в себя наложение хирургического инструмента в пределах предоперационного сканированного изображения и/или интраоперационного флюороскопического изображения, в качестве представления отслеживания хирургического инструмента в пределах интраоперационного эндоскопического изображения. Устройство отображения определяется, в широком смысле, в настоящей заявке, как любое устройство, конструктивно сконфигурированное для отображения изображений и отслеживаемых хирургических инструментов любым подходящим методом, например расширенной виртуальной визуализации изображений и отслеживаемых хирургических инструментов.
На фиг. 5 представлена блок-схема 70 последовательности операций способа, представляющая способ интеграции изображений, выполняемый блоком 61 интеграции изображений. Как показано на фиг. 5, блок-схема 70 последовательности операций способа содержит флюороскопический путь и эндоскопический путь, при этом оба пути ведут к этапу S74 интеграции изображений. Флюороскопический путь содержит этап S71 блок-схемы 70 последовательности операций, включающий в себя совмещение флюороскопических изображений интраоперационного флюороскопического изображения (например, изображения 41 на фиг. 4) и предоперационного сканированного изображения (например, изображения 31 на фиг. 4). В одном варианте осуществления этапа S71, совмещение флюороскопических изображений содержит известное в технике строгое пространственное преобразование 2-мерного интраоперационного флюороскопического изображения, в качестве заданного изображения, для совмещения с 3-мерным предоперационным сканированным изображением, в качестве опорного изображения, чтобы тем самым сформировать матрицу TX-CT (TCT-X=T-1 X-CT флюороскопического изображения, где -1 означает известное в технике обращение матрицы). В альтернативном варианте, совмещение флюороскопических изображений может содержать известное в технике строгое пространственное преобразование 3-мерного предоперационного сканированного изображения, в качестве заданного изображения, для совмещения с 2-мерным интраоперационным флюороскопическим изображением, в качестве опорного изображения, чтобы тем самым сформировать матрицу (TCT-X) флюороскопического изображения.
Этап S71 выполняется блоком 60 интеграции изображений, при формировании каждого нового кадра изображения флюороскопом (например, рентгеновской системой 40 на фиг. 4), которая включается при необходимости, определяемой хирургом во время хирургической операции.
Эндоскопический путь содержит этап S72 и этап S73 блок-схемы 70 последовательности операций способа. Этап S72 содержит реконструкцию поверхности объекта в пределах интраоперационного рентгеновского изображения (например, изображения 23 на фиг. 4). В примерном варианте осуществления этапа S72 для стереоскопического эндоскопа (например, артроскопа с двумя камерами, снимающими два изображения одновременно), можно применить любой известный в технике способ стереоскопической 3-мерной реконструкции.
В примерном варианте осуществления этапа S72 для монокулярного эндоскопа (например, однокамерного артроскопа, снимающего изображения), можно применить любой известный в технике метод фотограмметрической реконструкции. Например, если скорость монокулярного эндоскопа задана, то из оптического потока можно выделить карту глубины. В частности, оптический поток является векторным полем, представляющим движение каждой точки или особенности во временной серии изображений, вследствие чего точка на оптическом потоке, которая не движется в последовательных слоях, называется фокусом расширения («FOE»). Оптическая ось эндоскопа ориентирована по его перемещению, так что фокус расширения (FOE) совмещен с линией перемещения эндоскопа. Информацию (Z) о глубине можно выделять в соответствии с уравнением Z=v∗D/V по известному расстоянию (D) каждой точки или особенности от фокуса расширения («FOE»), амплитуде (V) оптического потока в каждой точке и скорости эндоскопа (v). Положение X и Y эндоскопа можно вычислять по характерным параметрам камеры (например, фокальной точки и т.п.).
Как должно быть очевидно специалистам со средним уровнем компетенции в данной области техники, эндоскоп является поворотным с целью реконструкции поверхности без использования оптических поисковых точек, и, в альтернативном варианте, эндоскоп не должен быть поворотным с целью реконструкции поверхности с использованием оптических поисковых точек.
Этап S73 включает в себя совмещение эндоскопических изображений предоперационного сканированного изображения (например, изображения 31 на фиг. 4) и реконструкции поверхности в пределах интраоперационного эндоскопического изображения (например, изображения 23 на фиг. 4). В одном примерном варианте осуществления этапа S73, совмещение эндоскопических изображений содержит известное в технике строгое пространственное преобразование реконструкции поверхности в пределах интраоперационного эндоскопического изображения, в качестве заданного изображения, для совмещения с 3-мерным предоперационным сканированным изображением, в качестве опорного изображения, чтобы тем самым сформировать матрицу TCT-E (TE-CT=T-1 CT-E) эндоскопического изображения. В частности, поверхность кости, показанную в пределах предоперационного сканированного изображения, можно сегментировать с использованием пороговой обработки изображений, при заданном характеристическом значении по шкале Хаунсфильда (например, 175 ед. Хаунсфильда), и для преобразования изображений можно исполнить итерационный алгоритм ближайших точек (ICP). В альтернативном варианте, совмещение эндоскопических изображений содержит известное в технике строгое пространственное преобразование 3-мерного предоперационного сканированного изображения, в качестве заданного изображения, для совмещения с реконструкцией поверхности в пределах интраоперационного эндоскопического изображения, в качестве опорного изображения, чтобы тем самым сформировать матрицу TE-CT эндоскопического изображения.
Этап S73 выполняется блоком 60 интеграции изображений, при формировании каждого нового кадра изображения эндоскопическим(и) устройством(ами) (например, артроскопом 20 на фиг. 4), который включается в повторяющемся режиме во время хирургической операции.
Этап S74 содержит интеграцию изображений матрицы TX-CT флюороскопического изображения, полученной на этапе S71, и матрицы TCT-E эндоскопического изображения, полученной на этапе S73. В одном примерном варианте осуществления этапа S74, интеграция изображений содержит известную в технике мультипликацию матриц матрицы TX-CT флюороскопического изображения и матрицы TCT-E эндоскопического изображения, чтобы тем самым получить интегрированную матрицу TX-E (TE-X=T-1 X-E) изображения.
Блок-схема 70 последовательности операций способа содержит цикл, исполняемый во время хирургической процедуры, с повторяющимся обновлением на этапе S74 через эндоскопический путь S72 и S73, при интегрировании с самым последним совмещением флюороскопического изображения на этапе S71.
На фиг. 6 представлена блок-схема 80 последовательности операций способа, представляющая способ отслеживания инструментов, выполняемый блоком 62 отслеживания инструментов (фиг. 4). Как показано на фиг. 6, этап S81 блок-схемы 80 последовательности операций способа содержит отслеживание хирургического инструмента в пределах интраоперационного эндоскопического изображения (например, изображения 23 на фиг. 4) и формирование матрицы TT-E эндоскопического изображения, представляющей положение хирургического инструмента (T) в пределах интраоперационного эндоскопического изображения (E) (например, матрица TT-E эндоскопического изображения может быть матрицей преобразования, показывающей наконечник инструмента в компоненте поступательного перемещения и ориентацию инструмента в компоненте поворота). В одном примерном варианте осуществления этапа S81, блок 62 отслеживания инструментов выполняет известный в технике метод фотограмметрического отслеживания. В частности, хирургический инструмент, обычно, имеет высокий контраст в пределах эндоскопического изображения, в сравнении с фоном (например, кости). Таким образом, положение хирургического инструмента в пределах эндоскопического изображения можно обнаруживать сегментацией изображения с использованием пороговой обработки в трех (3) цветных каналах. В альтернативном варианте, наконечник хирургического инструмента можно окрашивать выделяющимся цветом, хорошо наблюдаемым внутри тела (например, зеленым), который будет легко сегментировать по каналу зеленого цвета. В любом случае, после того как хирургический инструмент обнаружен сегментацией эндоскопического изображения, можно применить метод оценки глубины, описанный выше в настоящей заявке, чтобы оценить глубину инструмента относительно эндоскопического кадра.
Этап S82 блок-схемы 80 последовательности операций способа содержит отслеживание хирургического инструмента в пределах интраоперационного флюороскопического изображения посредством интеграции матрицы TT-E (TE-T=T-1VT-E) эндоскопического слежения и интегрированной матрицы TX-E изображения. В одном примерном варианте осуществления этапа S82, интеграция содержит известную в технике мультипликацию матриц матрицы TT-E эндоскопического слежения и матрицы, обратной интегрированной матрице TX-E изображения, чтобы тем самым получить матрицу TT-X (TX-T=T-1 T-X) флюороскопического слежения.
Этап S83 блок-схемы 80 последовательности операций способа содержит отслеживание хирургического инструмента в пределах предоперационного сканированного изображения посредством интеграции матрицы TT-E эндоскопического слежения и матрицы TCT-E эндоскопического изображения. В одном примерном варианте осуществления этапа S83, интеграция содержит известную в технике мультипликацию матриц матрицы TT-E эндоскопического слежения и матрицы, обратной матрице TCT-E эндоскопического изображения, чтобы тем самым получить матрицу TT-CT (TCT-T=T-1 T-CT) сканированного слежения.
Результатами этапов S82 и S83 являются отображения отслеживания в реальном времени хирургического инструмента в пределах предоперационного сканированного изображения и интраоперационного флюороскопического изображения, например накладка 32 слежения предоперационного сканированного изображения 31, показанная на фиг. 4, и накладка 43 слежения интраоперационного флюороскопического изображения 42, показанная на фиг. 4. Упомянутая задача решается без потребности во внешней системе визуализации (хотя одну данную систему можно применять в виде дополнения к эндоскопическому устройству) и совмещения пациента.
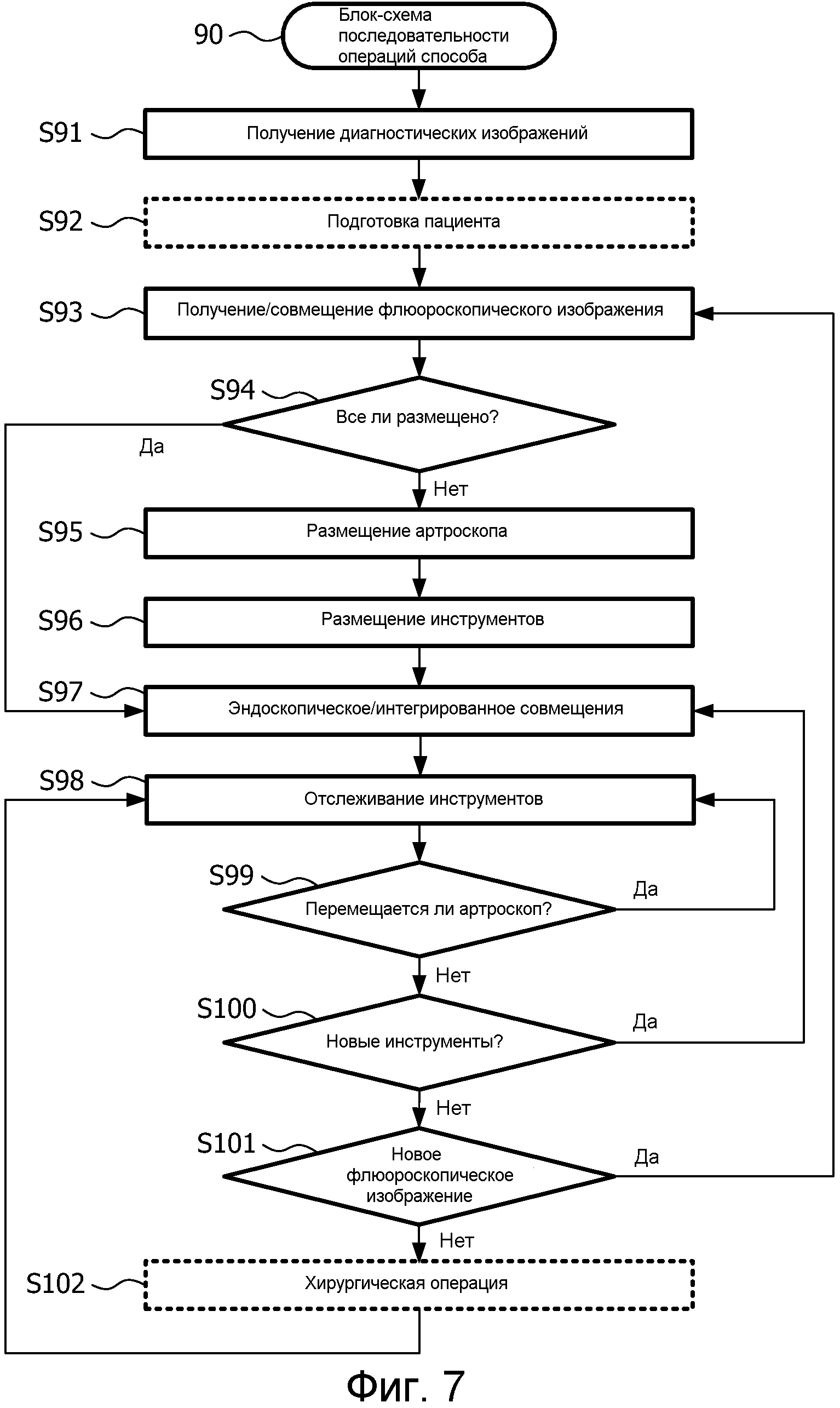
На фиг. 7 представлена блок-схема 90 последовательности операций способа, представляющая способ хирургической навигации, воплощающий блок-схему 70 последовательности операций способа (фиг. 5) и блок-схему 80 последовательности операций (фиг. 6) в контексте артроскопической хирургической операции связки ACL.
В частности, этап S91 блок-схемы 90 последовательности операций способа содержит получение предоперационного сканированного изображения (например, 3-мерного КТ-изображения, 3-мерного МРТ-изображения, 3-мерного рентгеновского изображения, 3-мерного флюороскопического изображения и т.п.). Этап S92 блок-схемы 90 последовательности операций способа содержит подготовку пациента к артроскопической хирургической операции связки ALC. Например, подготовка пациента может содержать растирание сухожилия колена и фиксацию колена для хирургической операции. Этап S93 блок-схемы 90 последовательности операций способа содержит получение интраоперационного флюороскопического изображения (например, 2-мерного рентгеновского изображения) и выполнение совмещения флюороскопического изображения на этапе S71 (фиг. 5).
Первый проход по блок-схеме 90 последовательности операций способа содержит этап S93, предшествующий этапам S95-S98. Этап S95 содержит размещение артроскопа в колене (например, артроскопа 20, показанного на фиг. 4). Этап S96 содержит размещение дополнительных хирургических инструментов в колене (например, режущего инструмента 21 и ирригационного инструмента 22, показанного на фиг. 4). Этап S97 содержит получение интраоперационного эндоскопического изображения и выполнение реконструкции поверхности по этапу S72 (фиг. 5), совмещение эндоскопических изображений по этапу S73 (фиг. 5) и интеграцию изображений по этапу S74 (фиг. 5). И этап S98 содержит отслеживание хирургического инструмента в соответствии с блок-схемой 80 последовательности операций способа (фиг. 6).
Этапы S99-S101 принятия решений допускают повторяющийся цикл между этапом S102 хирургической операции и этапом S98 отслеживания хирургических инструментов, пока (1) хирургом не перемещается артроскоп, что вызывает возврат на этап S97, (2) хирургом не вводится в колено новый хирургический инструмент, подлежащий отслеживанию, что вызывает возврат на этап S96, или (3) хирург не определяет потребность в новом флюороскопическом изображении, что вызывает возврат на этап S93. Любой возврат на этап S93 будет отправлять дальше на этап S97 через этап S94 принятия решения, если артроскоп и отслеживаемые хирургические инструменты еще размещаются.
На практике, специалистам со средним уровнем компетентности в данной области технике будет понятно, как осуществлять блок-схему 90 последовательности операций способа для других эндоскопических задач.
Выше приведено описание с пояснением к чертежам различных вариантов осуществления настоящего изобретения, однако специалистам будет понятно, что способы и система, описанные в настоящей заявке, являются наглядными, и элементы упомянутых способов и системы допускают внесение различных изменений и модификаций и эквивалентных замен, не выходящих за пределы подлинного объема настоящего изобретения. Кроме того, многие модификации могут быть выполнены с возможностью доработки принципов настоящего изобретения, без выхода за пределы его объема по существу. Поэтому следует считать, что настоящее изобретение не ограничено конкретными вариантами осуществления, описанными как наилучший вариант осуществления настоящего изобретения, что, напротив, настоящее изобретение содержит все варианты осуществления, не выходящие за пределы объема притязаний прилагаемой формулы изобретения.
Оценка глубины в реальном времени по монокулярным изображениям эндоскопа
Планирование с учетом взаимодействий по кривизне, нескольких радиусов кривизны и адаптивных окрестностей
Телескопическая канюля с блокировкой
Планирование траектории для уменьшения повреждения тканей в процессе минимально инвазивной хирургии
Светоизлучающее устройство, выполненное с возможностью приведения в действие переменным током
Блок управления силовым инвертором преобразования постоянного тока в переменный ток схемы резонансного силового преобразователя, в частности преобразователя постоянного тока в постоянный ток, для использования в цепях генератора высокого напряжения современного устройства компьютерной томографии или рентгенографической системы
Система контроля экг с конфигурируемыми пределами включения сигналов тревоги
Устройство для чистки межзубных промежутков с использованием жидких капель
Кофе-машина
Интерактивная бутылочка для кормления ребенка
Микрожидкостное устройство
Система для сохранения данных процедуры вмешательства
Энергосберегающий дисплей пропускающего типа
Близкорасположенный коллиматор для сид

